УДК 620.179.14
ВЛИЯНИЕ АМПЛИТУДЫ И ЧАСТОТЫ ТОКА ВОЗБУЖДЕНИЯ НА ОЦЕНКУ
КОРРОЗИИ ПО АНАЛИТИЧЕСКОЙ МОДЕЛИ ДЛЯ МАГНИТНОГО ПОЛЯ
ПОВЕРХНОСТИ
© 2020 г. Фэн Цзян1,2, Шулин Лю1,*, Шаоджи Синь3
1Шанхайский университет, Шанхай 200072, Китай
2 Институт мехатроники машиностроения, профессиональный колледж информационных технологий
Цзянсу, Уси 214153, Китай
3Шанхайский Диан Джи Университет, Шанхай 201306, Китай
*e-mail: lsl346@shu.edu.cn
Поступила в редакцию 27.10.2018; после доработки 27.07.2019
Принята к публикации 30.08.2019
Представлено влияние тока возбуждения на оценку коррозии цилиндрической формы в полубесконечной пласти-
не. Во-первых, установлена осесимметричная модель цилиндрической катушки над корродированной пластиной и
получено аналитическое решение с помощью метода разложения по собственным функциям в усеченной области
(TREE) для магнитного поля, измеряемого на поверхности объекта (поверхностное магнитное поле). Затем исследу-
ется и количественно оценивается влияние частоты и амплитуды тока возбуждения на поверхностное магнитное поле.
Обнаружено, что величина радиальной компоненты магнитной индукции увеличивается с увеличением частоты тока
возбуждения, тогда как величина осевой компоненты магнитной индукции уменьшается. Амплитуда тока возбужде-
ния пропорциональна величинам радиальной и осевой компонент магнитной индукции и не влияет на фазу величины
магнитной индукции. В результате, узел влияния (характеристический параметр) для определения радиуса и глубина
полости для обнаружения скрытой коррозии, очевидно, зависят от частоты тока возбуждения на графике в форме
бабочки. Результаты расчетов хорошо согласуются с численным моделированием, показывая, что разработанная
модель может быть использована для прогнозирования оптимальной частоты тока возбуждения. Из данной работы
видно, что соответствующая частота тока возбуждения, например, f = 500 Гц, может улучшить разрешение величины,
влияющей на определение радиуса коррозии. Для обнаружения скрытой коррозии более низкая частота тока возбуж-
дения, такая как f = 100 Гц, может усиливать явление дефекта и повышать точность обнаружения. Полезно не только
разрабатывать аналитическую модель для поверхностного магнитного поля, но и оптимизировать параметры измери-
тельного устройства.
Ключевые слова: ток возбуждения, поверхностное магнитное поле, аналитическая модель, оценка коррозии.
DOI: 10.31857/S0130308220080060
ВВЕДЕНИЕ
Вихретоковый контроль, основанный на принципе электромагнитной индукции, является
одним из пяти традиционных методов неразрушающего контроля. Он имеет преимущества в
высокой скорости, низкой стоимости и бесконтактности, а также широко используется при про-
верке качества и структурной целостности металлов и сплавов [1—3]. Для понимания физиче-
ского механизма, оптимизации конструкции зонда и параметра контроля и даже для вычисления
и оценки вероятности обнаружения дефектов могут быть использованы теоретические модели
[4, 5]. По сравнению с численными моделями, аналитические модели обеспечивают четкую
функциональную связь между сигналами датчиков и физическими параметрами. Расчет анали-
тической модели практически не зависит от размера катушки, параметров контролируемого объ-
екта и значительно меньше численной модели. Таким образом, он особенно подходит для рас-
чета влияния небольших изменений параметров на датчик. Theodoulidis и др. применил метод
TREE для аналитического моделирования вихретокового контроля. Метод TREE значительно
упрощает расчет сопротивления катушки и повышает точность вычислений. С тех пор метод
TREE позволяет получить соответствующие такие аналитические модели, как модель влияния
концов труб и стержней на импеданс катушки и модель импеданса катушки плоского проводни-
ка, содержащего дефект [6-8].
Тем не менее метод TREE еще предстоит дополнить и улучшить. Во-первых, традиционные
вихретоковый контроль основан на измерении полного сопротивления катушки. Таким образом,
метод TREE, наконец, дает аналитическое выражение импеданса катушки. Поскольку импеданс
катушки фактически является одномерным сигналом, можно только лишь судить о наличии или
отсутствии дефектов и нельзя полностью получить многомерную информацию о дефектах.
Магнитное поле между катушкой и изделием, особенно вблизи поверхности изделия, содержит
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
57
обширную информацию. Трехмерное поверхностное магнитное поле может предоставлять
информацию о глубине, длине и ширине дефекта. Поэтому изучение поверхностного магнитно-
го поля важно для реконструкции дефектов [9, 10]. Кроме того, успешная разработка высоко-
эффективных магнитных датчиков обеспечивает основу для реконструкции дефектов на основе
поверхностного магнитного поля. В настоящее время проводятся экспериментальные исследо-
вания по неразрушающему контролю на основе GMR и других магнитных датчиков [11, 12].
Однако теоретические исследования по оценке дефектов на основе магнитного поля отстают от
прикладных исследований. Кроме того, магнитное поле свободного пространства фактически
зависит от многих факторов. Ток возбуждения, протекающий в катушке, является источником
магнитного поля. Изменение магнитного поля, вызванное дефектом, является полем рассеяния.
Поэтому для анализа дефектов необходимо глубоко проанализировать влияние тока катушки на
поверхностное магнитное поле. Есть несколько теоретических исследований влияния тока воз-
буждения на обнаружение магнитного поля для различных дефектов. Это, в некоторой степени,
ограничивает применение этого метода.
В этой статье с помощью метода TREE получено аналитическое выражение для поверхностно-
го магнитного поля полубесконечной пластины, содержащей коррозионное отверстие. На основе
созданной аналитической модели изучены и проанализированы влияния различных частот и
амплитуд тока возбуждения на определение радиуса и толщины коррозии, а также глубины зале-
гания скрытой коррозии. Выводы, сделанные на основе исследования, обеспечивают теоретиче-
скую основу для применения модели и оптимального проектирования, и разумного выбора зонда
возбуждения.
1. АНАЛИТИЧЕСКАЯ МОДЕЛЬ ОЦЕНКИ КОРРОЗИИ
НА ОСНОВЕ МАГНИТНОГО ПОЛЯ ПОВЕРХНОСТИ
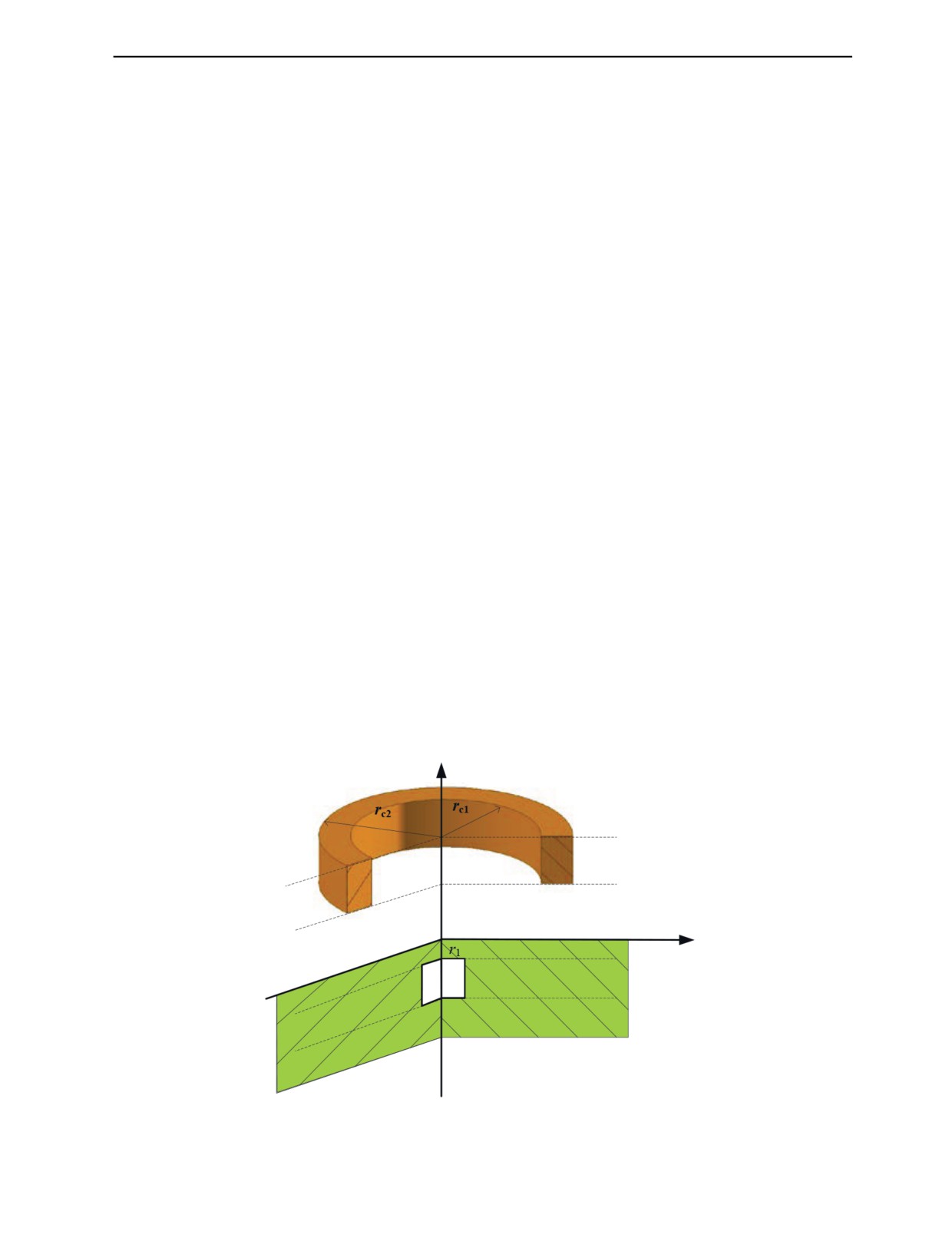
Как показано на рис. 1, над полубесконечным проводником находится цилиндрическая
катушка с синусоидальным током. Ось симметрии катушки перпендикулярна проводнику.
Расстояние между нижней плоскостью катушки и плоскостью проводника равно z1. Внутренний
и внешний радиусы катушки равны rc1 и rc2 соответственно, а высота равна z2 - z1. Имеется
коррозия в виде цилиндра с радиусом r1 и толщиной d1 на расстоянии d2 ниже поверхности
проводника. Задача может быть упрощена до осесимметричного электромагнитного поля.
Чтобы решить эту задачу, мы делим поле на пять областей: область 1, расположенная над
катушкой, (z ≥ z2), область 2 (0 ≤ z ≤ z1), область 3 (-d2 ≤ z ≤ 0), область 4 (-d2- d1 ≤ z ≤ -d2) и
область 5 (z ≤ -d2- d1). Область 4 разделена на 2 подобласти: коррозионная зона 4-1 (r ≤ r1) и
бескоррозионная зона 4-2 (r ≥ r1) из-за наличия дефекта.
z
z = z2
Область 1
z = z1
z = 0
r
Область 2
z = -d2
z = -d2- d1
Область 3
Область 4
Область 5
Рис. 1. Осесимметричная модель со скрытой коррозией.
Дефектоскопия
№ 8
2020
58
Фэн Цзян, Шулин Лю, Шаоджи Синь
В данной работе подход к решению задачи определения поля рассеяния дефекта в полупро-
странстве аналогичен сеточному методу. При численном решении этой задачи с использованием
сеточного метода необходимо ограничиться конечными размерами и совместить решения на лини-
ях z = - d2, z = - (d2 + d1) и наложить условия согласования на внешней границе и границах дефек-
та. Магнитный векторный потенциал A определяется как ∇×A = B с ∇ × A = 0. В гармоническом
по времени электромагнитном поле уравнения Максвелла могут быть преобразованы в простые
уравнения связей путем введения магнитного векторного потенциала. Потенциал магнитного век-
тора удовлетворяет уравнению Лапласа в воздухе и уравнению Гельмгольца в проводящей обла-
сти, соответственно, следующим образом [7]:
2
∇
A= 0,
(1)
2
2
(∇
−k
)A= 0,
(2)
где k2 = jωμσ. Электромагнитное поле представлено магнитным векторным потенциалом только с
азимутальной составляющей. Используя цилиндрические координаты для решения вышеуказан-
ной задачи, (2) можно переписать как
2
2
∂
A
1
∂A
∂
A A
2
+
+
-
=
k
A.
(3)
2
2
2
∂r
r ∂r
∂z
r
Магнитный векторный потенциал A может определяться как
A(r,z)= R(r)Z (z).
(4)
Согласно методу разделения переменных, мы можем получить следующие два дифференци-
альных уравнения:
2
2
d
R
dR
2
2
r
+
r
+
(
a
r
−1
)
R
=
0,
(5)
2
dr
dr
2
1 d
Z
2
2
−
k
=
a
,
(6)
2
Z
dz
где a2 определена как константа. Когда a > 0, общее решение (5):
R(r) = CJ
1
(ar) + DY
1
(ar).
(7)
J1 обозначает функцию Бесселя первого рода и первого порядка, а Y1 обозначает функцию Бесселя
второго рода и первого порядка. В областях 1, 2, 3 и 5 подстановка lim
R(r)
< ∞ в (7) приводит к
D = 0. Следовательно, в этих четырех областях:
R(r) = CJ
1
(ar).
(8)
Поскольку магнитный векторный потенциал удовлетворяет однородному условию Дирихле
при r = h, граничное условие может быть задано следующим образом:
A
=
0,
(9)
r=h
где h — искусственная граница. Подставляя(4) и (8) в граничное условие (9) и учитывая Z(z) ≠ 0,
получаем:
J
1
(
a
i
h
)
=
0.
(10)
Таким образом, соответствующая собственная функция:
R
i
(
r
)
= CJ
1
(
a
i
r
),
i=1,2,... .
(11)
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
59
Подставляя ai в (6) и полагая λi2 = k2 + ai2, может быть получено решение (6) в виде:
λ
i
z
−λ
i
z
Z z)=
C
e
+
D
e
,
i
=1,2,... .
(12)
i
i
i
Суммируя все особые решения (11) и (12), можно получить общее решение магнитного вектор-
ного потенциала:
∞
λ
i
z
−λ
i
z
A
(
r,z
)
=
J
(
a
r
Ce
+
De
(13)
∑
1
i
)(
i
i
)
i =1
Следовательно, магнитные векторные потенциалы в трех областях могут быть выражены как:
∞
a
i
z
−
a
i
z
A
r,z
=
J
a
r
C
e
+
D
e
,
(14)
2
(
)
∑
1
(
i
)(
2
2
)
i =1
∞
λ
i
z
−λ
i
z
A
3
(
r,z
)
=
∑
J
1
(
a
i
r
)(
C
3
e
+
D
3
e
)
,
(15)
i =1
∞
λ
i
z
A
(
r,
z
)
C
J
(
a
r
)
e
(16)
5
=∑
5
1
i
i =1
Первая часть магнитного векторного потенциала области 2 представляет собой действие поля
источника, а вторая часть — влияние индуцированного вихревого тока в проводнике.
Чтобы задать магнитный векторный потенциал области 4, вводятся собственные значения pi
и qi. С точки зрения распространения электромагнитной волны, pi можно интерпретировать как
число поперечных волн, а qi можно интерпретировать как число продольных волн. Как правило,
необходимо обеспечить, чтобы экспоненциальные члены в выражении магнитного векторного
потенциала области 4, включающей зону коррозии и зону проводника, были одинаковыми.
Между тем, чтобы отличаться от других слоев, потенциал магнитного вектора в области 4 можно
выразить в следующем виде, учитывая, что решение, ограниченное при r = 0, является расходя-
щимся:
∞
q
z
−q
z
i
i
A
(
r,z
)
=
J
(
q
r
C
e
+
D
e
,
0
≤
r≤ r
,
4(1)
∑
1
i
)(
4(1)
4(1)
)
1
i=1
(17)
∞
q
i
z
−q
i
z
A
(
r,z
)
=
[C′
J
(
p
r
)
+
D
′
Y
(
p
r
](
C
e
+
D
e
)
,
r
≤
r≤ h,
4(2)
∑
4(2)
1
i
4
1
i
4(2)
4(2)
1
i=1
2
2
где
q
i
= p
i
+k
2.
Подставляя условие (9) в A4(2), имеем
J
(
p
h
)
1
i
D
′
=-
C
′
(18)
4(2)
4(2)
Y
(
p
h
)
1
i
Подстановка (18) в A4(2) дает
∞
q
i
z
−q
i
z
A
(
r
,
z
)
=
[
Y
(
p
h
)
J
(
p
r
)
−
J
(
p
h
)
Y
(
p
r
](
C
e
+
D
e
(19)
4(2)
∑
1
i
1
i
1
i
1
i
4(2)
4(2)
)
i
=1
Для того, чтобы удовлетворить непрерывность Aφ на коррозионной поверхности r = r1, можно
получить
∞
q
i
z
−q
i
z
A
4(2)
(
r
,
z
)
=
∑
b
i
[
Y
1
(
p
i
h
)
J
1
(
p
i
r
)
−
J
1
(
p
i
h
)
Y
1
(
p
i
r
](
C
4(1)
e
+
D
4(1)
e
)
,
(20)
i
=1
J
(
q
r
)
1
i
1
где
b
i
=
Y
(
p
h
)
J
(
p
r
)
−
J
(
p
h
)
Y
(
p
r
)
1
i
1
i
1
1
i
1
i
1
Дефектоскопия
№ 8
2020
60
Фэн Цзян, Шулин Лю, Шаоджи Синь
Таким образом, выражения для двух подобластей области 4 может быть переписано как
∞
q
i
z
−q
i
z
A
(
r,z
)
=
J
(
q
r
)(
C
e
+
D
e
)
,
0
≤
r
≤
r,
4(1)
∑
1
i
4
4
1
i=1
(21)
∞
q
i
z
−q
i
z
A
(
r,z
)
=
b[Y
(
p
h
)
J
(
p
r
)
−
J
(
p
h
)
Y
(
p
r
](C
e
+
D
e
,
r
≤
r≤ h.
4(2)
∑
i
1
i
1
i
1
i
1
i
4
4
)
1
i=1
Собственные значения pi и qi могут быть рассчитаны, используя непрерывность тангенциаль-
2
2
ной компоненты магнитного поля Hz при r = r1 в области 4 и
q
i
= p
i
+k
2.
Граничные условия между двумя различными областями:
A
(
r,0)
=
A r,0),
2
3
(22)
(
∂ ∂z
)
A
(
r z)
=
(1
µ
)(∂ ∂z
)
A r,z)
,
2
z=
0
r
3
z=
0
A
(r,-d
)
=
A
(r,
−d
),
3
2
4
2
(1
µ
r
)(∂ ∂
z)
A
3
(r,z)
=
(
∂ ∂
z)
A
4(1)
(r,z
)
,
(23)
z d
z d
2
2
(∂ ∂
z
)
A r,z)
=
(
∂ ∂
z
)
A r,z)
,
3
z d
4(2)
2
z d
2
A
(r,
−
d
−
d
)
=
A
(r,
−
d
−
d
),
4
2
1
5
2
1
(∂ ∂z
)
A
(r,z)
=
(1
µ
)(
∂ ∂
z
)
A
(r,z)
,
(24)
4(1)
r
5
z=-d
−d
z=-d −d
2
1
2
1
(∂ ∂z
)
A
(r,z)
=
(
∂ ∂
z
)
A z)
4(2)
z=-d
−d
5
z=−d
2
−
d
1
2
1
Подстановка (14) и (15) в (22) дает:
∞
∞
J
a
r
C
+
D
=
J
a
r
C
+
D
,
∑
1
(
j
)(
2
j
2
j
)
∑
1
(
j
)(
3
j
3
j
)
j=1
j
=1
(25)
∞
∞
1
a
J
(
a
r
)(
C
−
D
)
=
λ
J
(
a
r
)(
C
−
D
)
∑
j
1
j
2
j
2
j
∑
j
1
j
3
j
3
j
µ
j
=1
j
=1
r
Подставляя (15) и (21) в (23) и используя свойства ортогональности, имеем:
2
∞
h
λ
d
r
h
d
2
j
2
1
J2 (
a
h
e-λj
C
+
e
D
=
rJ
(
a
r
)
J
q
r
dr
+
b
rJ
(
a
r
)
×
0
i
)⋅(
3
j
3
j
)
∑
∫
1
i
1
(
j
)
∫
j
1
i
0
r
1
2
j
=
1
(26)
−
q
j
d
2
q
j
d
2
×[
Y
p
h
J
p
r
−
J
p
h
Y
p
r
]
dr
×
e
C
+
e
D
,
1
(
j
)
1
(
j
)
1
(
j
)
1
(
j
)
(
4
j
4
j
)
2
∞
h
-λ
d
λ
d
r1
h
j
2
j
2
J2 (a
h
)
⋅λ
e
C
−
e
D
=
µ
q
rJ
(
a
r
)
J
q
r
dr
+b
q
rJ
(
a
r
)
×
0
i
j
(
3
j
3
j
)
∑
r
j
∫
1
i
1
(
j
)
j
j
∫
1
i
0
r1
2
j
=1
(27)
−
q
j
d
2
q
j
d
2
×
[
Y
p
h
J
p
r
−
J
p
h
Y
p
r
]dr
×
e
C
−e
D
1
(
j
)
1
(
j
)
1
(
j
)
1
(
j
)
(
4
j
4
j
)
Аналогично, подстановка (16) и (21) в (24) и использование такого же метода для (26), (27) дает:
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
61
∞
r
1
h
rJ
(
a
r
)
J
(
q
r
)
dr
+
b
rJ
(
a
r
)
[Y
(
p
h
)
J
(
p
r
)
-J
(
p
h
)
Y
(
p
r
)
]dr
×
∑
∫
1
i
1
j
∫
j
1
i
1
j
1
j
1
j
1
j
0
r
1
j=1
(28)
2
−q
d
+d
q
d
+d
h
−λ
d
+d
j
(
2
1
)
j
(
2
1
)
2
j
(
2
1
)
×
e
C
+
e
D
=
J
(
a
h
)
⋅
e
C
,
(
4j
4j
)
0
i
5j
2
∞
r1
h
∑
ì
r
q
j
rJ
1
(
a
i
r
)
J
1
(
q
j
r
)
dr
+
rJ
1
(
a
i
r
)
q
j
b
j
[Y
1
(
p
j
h
)
J
1
(
p
j
r
)
-J
1
(
p
j
h
)
Y
1
(
p
j
r
)
]dr
×
∫
0
∫
r
1
j=1
(29)
2
−q
j
(
d
2
+d
1
)
q
j
(
d
2
+d
1
)
h
2
−λ
j
(
d
2
+d
1
)
×
e
C
−e
D
=
J
(
a
h
)
λ
e
C
(
4j
4j
)
0
i
j
5j
2
После решения для различных коэффициентов мы получим магнитные векторные потенциа-
лы в каждой из областей. Без учета проводящей пластины магнитный векторный потенциал в
2
области 2 для катушки возбуждения определяется выражением
∇
A
2
= -µ
0
µ
r
J
,
J = nI, где n —
плотность витка, м-2; а I — амплитуда тока, А. Коэффициент C2 является исходным коэффици-
ентом, который имеет вид [6]
χ
(
a
r
,
a
r
)
i c1
i c
2
−
a
i
z
1
−
a
i
z
2
C
=µ
i
e
−
e
,
2
0
2
(
)
(30)
4
a
hJ
(
a
h
)
i
0
i
где
i=N
I
(
r
−r
)(
z
−z
)
— плотность тока источника в катушке, Nc — число витков катуш-
c
c2
c1
2
1
ки,
χ
(
a
r
,ar
)
определяет a — конечный интеграл функции Бесселя. Величины радиальных и
i c1
c2
осевых компонент магнитной индукции в области 2 в результате коррозии можно рассчитать как:
N
a
i
z
−a
i
z
B
r
=-∂A
2
∂z
=-
∑
a
i
J
1
(
a
i
r
)
(
C
2
i
e
−
D
2
i
e
),
(31)
i=1
N
a
i
z
−
a
i
z
B
=∂
A
∂r
=
a
J
a
r
C
e
+
D
e
(32)
z
2
∑
i
0
(
i
)(
2
2
)
i =1
После расчета и анализа конечное число слагаемых N = 50 полностью соответствует требова-
нию. Влияние частоты и амплитуды тока возбуждения на оценку коррозии анализируется для
будущих применений этой аналитической модели.
2. АНАЛИЗ И ОБСУЖДЕНИЕ
2.1. Влияние частоты тока возбуждения на определение радиуса коррозии
Толщина коррозии d1 = 0,4 мм и скрытая глубина (глубина внутренней коррозии) d2 = 0,1 мм
остаются неизменными. При изменении радиуса коррозии r1 (r1 = 0,01, 0,5, 1, 1,5 и 2 мм) изуча-
лось влияние различных частот тока возбуждения на определение радиуса коррозии. Параметры
катушки следующие: rc1 = 2 мм, rc2 = 4 мм, z1 = 1 мм, z2 = 4 мм и Nc = 800. Параметры образца
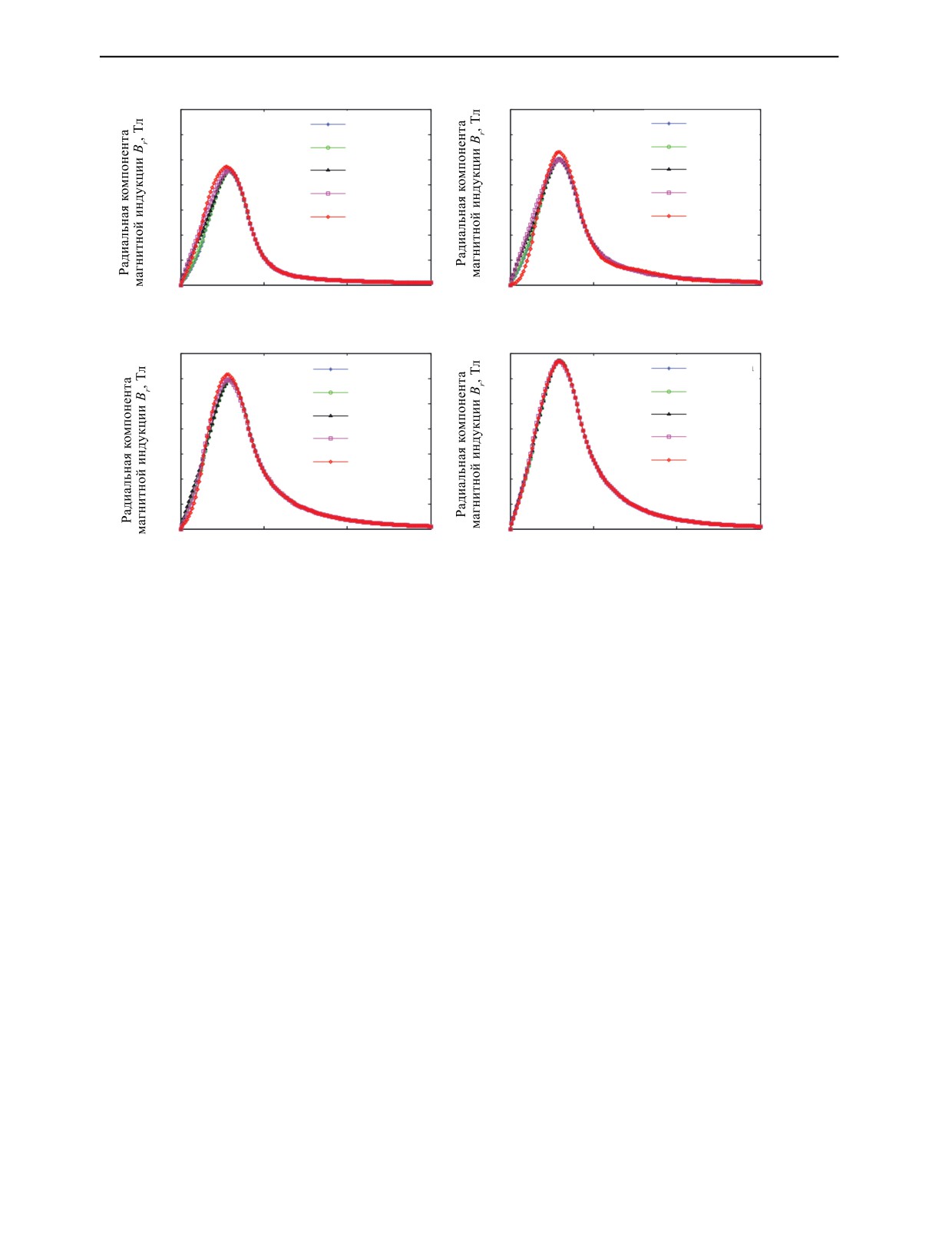
следующие: σ = 3,6 × 107 См/м, μr = 5. На рис. 2a—г показано, что величина радиальной маг-
нитной индукции при z = 0,5 мм изменяется в зависимости от радиуса коррозии при частотах
тока возбуждения 100, 500, 2000 и 5000 Гц соответственно. Поэтому из рис. 2 можно сделать
следующие выводы.
1. Распределения радиальной магнитной индукции в основном схожи при разных частотах тока
возбуждения. По мере увеличения расстояния магнитная индукция постепенно увеличивается,
достигая максимального значения в центре катушки (r = (rc1 + rc2) / 2 = 3 мм), а затем постепенно
уменьшается и приближается к нулю.
2. Частота тока возбуждения оказывает определенное влияние на магнитную индукцию. По
мере увеличения частоты магнитная индукция в одной и той же точке увеличивается. Возьмем для
примера r1 = 1 мм: частота увеличивается от 100 до 5000 Гц, максимальная величина магнитной
Дефектоскопия
№ 8
2020
62
Фэн Цзян, Шулин Лю, Шаоджи Синь
a
б
–3
×10
×10-3
3,5
3,5
r1
= 0,01 мм
r1 = 0,01 мм
3
3
r1
= 0,5 мм
r1 = 0,5 мм
2,5
2,5
r1 = 1 мм
r1 = 1 мм
2
2
r1 = 1,5 мм
r1 = 1,5 мм
1,5
1,5
r1 = 2 мм
r1 = 2 мм
1
1
0,5
0,5
0
0
0
5
10
15
0
5
10
15
Расстояние r, мм
Расстояние r, мм
г
–3
в
×10
×10-3
3,5
3,5
r1
= 0,01 мм
r1 = 0,01 мм
3
3
r1
= 0,5 мм
r1 = 0,5 мм
2,5
2,5
r1 = 1 мм
r1 = 1 мм
2
2
r1 = 1,5 мм
r1 = 1,5 мм
1,5
1,5
r1 = 2 мм
r1 = 2 мм
1
1
0,5
0,5
0
0
0
5
10
15
0
5
10
15
Расстояние r, мм
Расстояние r, мм
Рис. 2. Зависимость величины радиальной компоненты магнитной индукции от радиуса коррозии при f = 100 Гц (a),
f = 500 Гц (б), f = 2000 Гц (в) и f = 5000 Гц (г).
индукции возрастает с 2,27 × 10-3 до 3,35 × 10-3 Тл. Поэтому разумно утверждать, что увеличение
частоты тока возбуждения способствует обнаружению магнитного поля.
3. Далее рассматривается влияние частоты тока возбуждения и радиуса коррозии на магнит-
ное поле на поверхности. Как показано на рис. 2а, б, частота тока возбуждения увеличивается
от 100 до 500 Гц, а также увеличивается диапазон изменения радиальной компоненты магнит-
ного поля, вызванного большим коррозионным отверстием (таким как r1 = 2 мм), Это является
преимуществом при контроле изделий с более крупными коррозионными отверстиями. Однако
для отверстий с меньшим радиусом (например, r1 ≤ 1,5 мм) изменение радиальной магнитной
индукции в точке r = 1 мм составляет 0,378 мТл, тогда как радиус коррозии увеличивается от
0,01 до 1,5 мм и частота тока возбуждения f = 100 Гц. При частоте тока возбуждения f = 500 Гц
изменение радиальной магнитной индукции в точке r = 1 мм составляет 0,318 мТл, тогда как
радиус коррозии увеличивается от 0,01 до 1,5 мм. Вышеуказанные расчеты показали, что уве-
личение частоты тока возбуждения немного снижает чувствительность к обнаружению мень-
ших отверстий. Когда частота тока возбуждения дополнительно увеличивается, из рис. 2в, г
видно, что диапазон изменения радиального компоненты магнитного поля, вызванного корро-
зионным отверстием, значительно ослаблен. Это проявляется на всех типах отверстий, в боль-
шей или меньшей степени. Следовательно, для определения радиуса коррозии частота тока
возбуждения должна быть выбрана обосновано. Используя аналитическую модель, можно
заранее рассчитать оптимальную частоту тока возбуждения, что полезно для контроля неболь-
ших изменений радиуса коррозии.
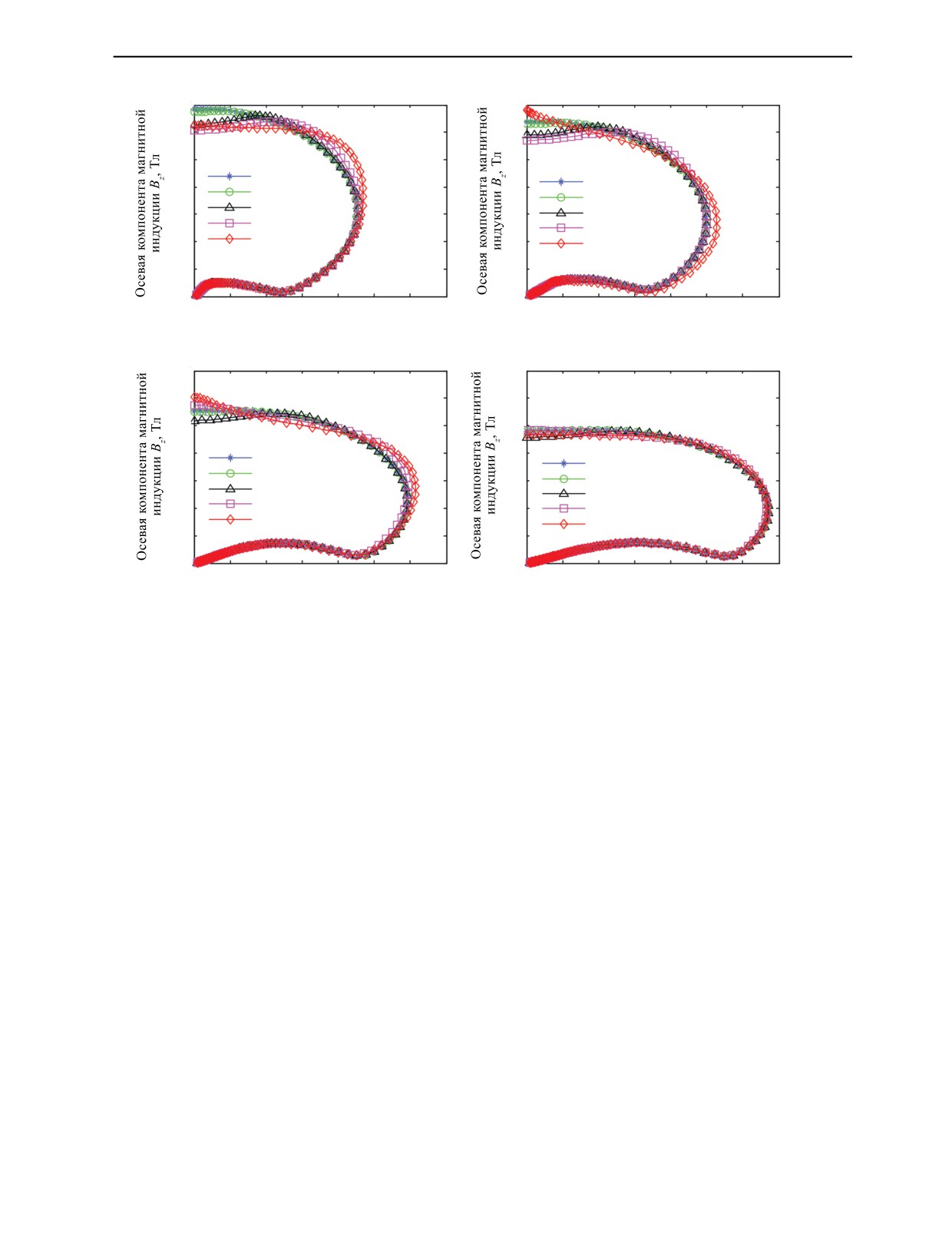
Посредством расчета и анализа было обнаружено, что изменение осевой компоненты маг-
нитного поля, вызванное радиусом коррозии при различных частотах тока возбуждения, в
основном, согласуется с ранее проанализированной радиальной компонентой магнитного поля.
Однако увеличение частоты тока возбуждения уменьшает величину осевой компоненты магнит-
ной индукции. На рис. 3 показан график в форме бабочки, который изменяется в зависимости от
радиуса коррозии при разных частотах тока. Из рис. 3 можно заключить следующее.
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
63
a
б
-3
×10-3
×10
7
7
6
6
5
5
r1
= 0,01 мм
r1 = 0,01 мм
4
4
r1 = 0,5 мм
r1 = 0,5 мм
r1 = 1 мм
3
3
r1 = 1 мм
r1 = 1,5 мм
r1 = 1,5 мм
r1 = 2 мм
2
2
r1 = 2 мм
1
1
00
0,5
1
1,5
2
2,5
3
3,5
00
0,5
1
1,5
2
2,5
3
3,5
Радиальная компонента магнитной
Радиальная компонента магнитной
индукции Br, Тл
индукции Br, Тл
×10-3
в
×10-3
г
7
7
6
6
5
5
r1
= 0,01 мм
4
4
r1 = 0,5 мм
r1 = 0,01 мм
r1
= 1 мм
3
r1 = 0,5 мм
3
r1 = 1,5 мм
r1 = 1 мм
r1 = 2 мм
2
r1 = 1,5 мм
2
r1
= 2 мм
1
1
0
0
0
0,5
1
1,5
2
2,5
3
3,5
0
0,5
1
1,5
2
2,5
3
3,5
Радиальная компонента магнитной
Радиальная компонента магнитной
индукции Br, Тл
индукции Br, Тл
Рис. 3. Изменения графиков в форме бабочки в зависимости от радиуса коррозии при f = 100 Гц (a), f = 500 Гц (б),
f = 2000 Гц (в) и f = 5000 Гц (г).
1) При увеличении частоты тока возбуждения величина радиальной магнитной индукции уве-
личивается, а осевой — уменьшается. Поэтому при различных частотах тока возбуждения график,
показывающий зависимость осевой компоненты от радиальной, значительно изменяется. По мере
увеличения частоты график расширяется по горизонтали и сжимается по вертикали. При частоте
f = 100 Гц график сжат по горизонтальной оси, в то время как при частоте f = 5000 Гц график
обладает вытянутой формой.
2) При различных частотах тока возбуждения величины изменений магнитного поля в зависи-
мости от радиуса коррозии также различны. Из рис. 3 видно, что при f = 100 Гц изменение графи-
ка, вызванное изменением радиуса коррозии, является наиболее очевидным. При f = 5000 Гц, хоть
радиус коррозии и изменяется, заметных изменений в форме графика не происходит. Поэтому для
определения радиуса коррозии следует выбирать более низкую частоту тока возбуждения.
3) При использовании узла влияния в качестве количественного параметра определения ради-
уса коррозии из рисунка можно увидеть, что кривые при разных радиусах коррозии имеют очевид-
ные точки пересечения на более низких частотах, которые полезны для определения радиуса. На
более высоких частотах кривые практически перекрываются, что затрудняет выделение количе-
ственного параметра.
4) Мы знаем, что для обнаружения дефектов на основе ЭДС индукции, возникающей в катуш-
ке, должна быть выбрана более высокая частота тока возбуждения. Это связано с тем, что ЭДС
индукции пропорционально скорости изменения магнитного потока. Следовательно, увеличение
частоты способствует улучшению чувствительности контроля. Чтобы получить требуемую ЭДС
индукции, следует выбирать более высокую частоту тока возбуждения. В этом случае из-за скин-
эффекта могут быть обнаружены только дефекты на поверхности объектов, а более глубоких
дефекты не могут быть обнаружены. Метод, основанный на измерении поверхностного магнитно-
го поля, не столкнется с такими проблемами. На низких частотах может быть получена высокая
Дефектоскопия
№ 8
2020
64
Фэн Цзян, Шулин Лю, Шаоджи Синь
чувствительность контроля, а также определены глубокие дефекты. Это преимущество при кон-
троле дефектов на основе магнитного поля поверхности.
2.2. Влияние частоты тока возбуждения на определение глубины скрытой коррозии
Толщина коррозии d1 = 0,5 мм и радиус r1 = 1 мм остаются неизменными. Взаимосвязь между
величиной радиальной компоненты магнитной индукции и скрытой глубиной коррозии показана
на рис. 4. На рис. 4а—г представлены результаты расчетов при частоте тока возбуждения f = 100,
500, 2000 и 5000 Гц соответственно. Скрытая глубина d2 составляет 0,01, 0,1, 0,5, 1 и 2 мм соот-
ветственно. Остальные параметры такие же, как в разделе 2.1.
a
б
–3
×10
×10-3
3,5
3,5
d2 = 0,01 мм
d2
= 0,01 мм
3
3
d2
= 0,5 мм
d2 = 0,5 мм
2,5
2,5
d2 = 1 мм
d2 = 1 мм
2
2
d2 = 1,5 мм
d2 = 1,5 мм
1,5
d2 = 2 мм
1,5
d2 = 2 мм
1
1
0,5
0,5
0 0
5
10
15
00
5
10
15
Расстояние r, мм
Расстояние r, мм
в
г
×10-3
×10
-3
3,5
3,5
d2 = 0,01 мм
d2
= 0,01 мм
3
3
d2
= 0,5 мм
d2 = 0,5 мм
2,5
2,5
d2 = 1 мм
d2 = 1 мм
2
2
d2 = 1,5 мм
d2 = 1,5 мм
1,5
d2 = 2 мм
1,5
d2 = 2 мм
1
1
0,5
0,5
0 0
5
10
15
00
5
10
15
Расстояние r, мм
Расстояние r, мм
Рис. 4. Зависимость величины радиальной компоненты магнитной индукции от глубины при f = 100 Гц (a),
f = 500 Гц (б), f = 2000 Гц (в) и f = 5000 Гц (г).
Из рис. 4 можно обобщить результаты расчетов. Когда дефекты имеют одинаковые параметры
(r1, d1 и d2), магнитное поле изменяется при различной частоте возбуждения тока. При f = 100 Гц
может наблюдаться значительное изменение радиальной компоненты магнитного поля для корро-
зии на 0,1 мм ниже поверхности. При f = 2000 Гц дефект оказывает незначительное влияние на
радиальное магнитное поле поверхности. При дальнейшем увеличении частоты тока возбуждения
до f = 5000 Гц никаких изменений магнитного поля поверхности не наблюдается, даже если кор-
розия находится на 0,01 мм ниже поверхности образца. Поэтому увеличение частоты тока возбуж-
дения неблагоприятно сказывается контроле скрытой глубины коррозионного отверстия. Для
обнаружения коррозии, находящейся глубоко в образце, следует использовать более низкую часто-
ту тока возбуждения. Это явление еще можно объяснить классическим скин-эффектом. Когда
частота тока возбуждения выше, вихревые токи в основном концентрируются на поверхности
образца. Находящийся глубоко дефект не нарушает распределение вихревых токов на поверхности
образца; следовательно, часть магнитного поля поверхности, создаваемого вихревым током, изме-
няться не будет.
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
65
a
б
в
г
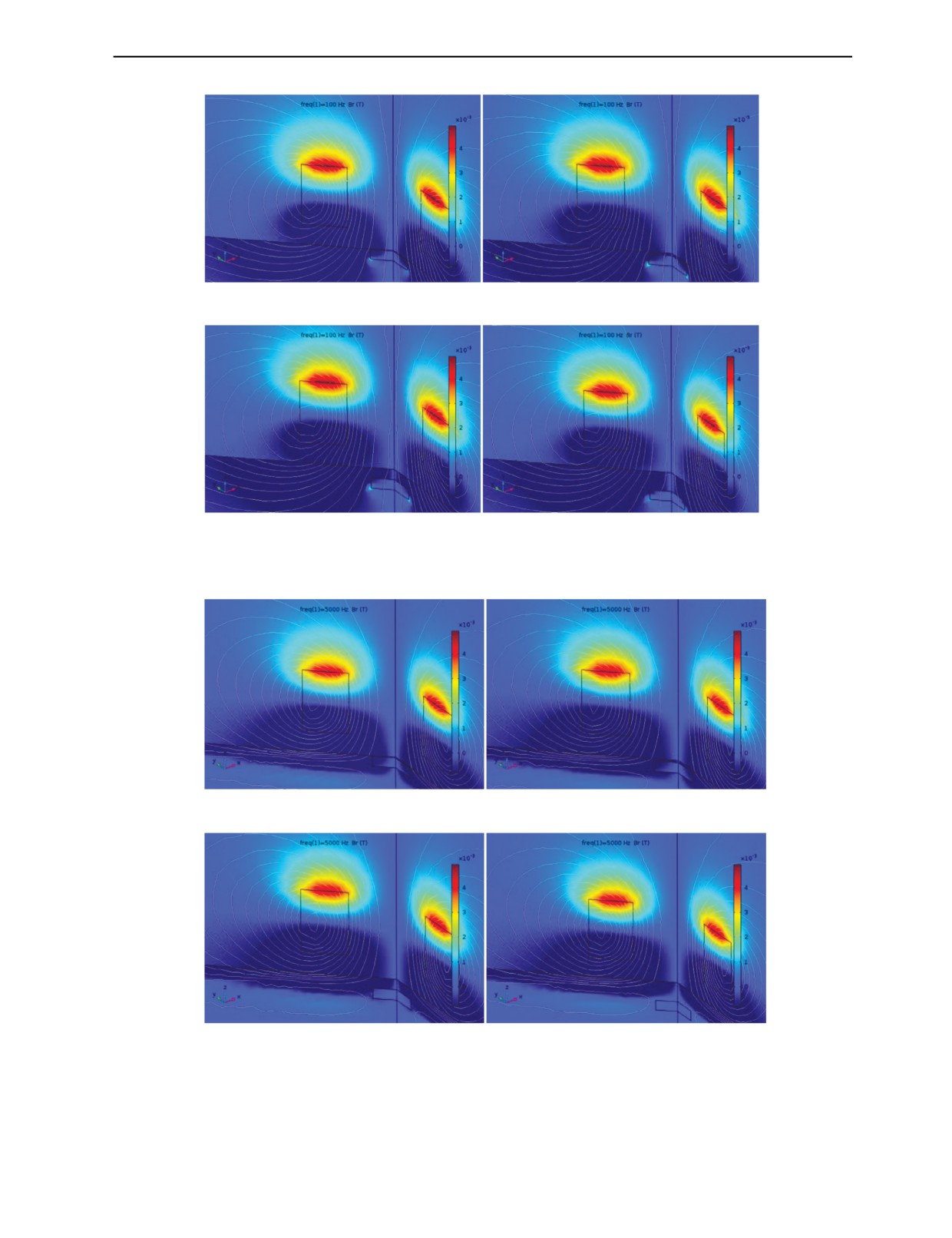
Рис. 5. Конечно-элементное моделирование величины радиальной компоненты магнитной индукции при различных
глубинах скрытой коррозии: d2 = 0,01 мм (a); d2 = 0,1 мм (б); d2 = 0,5 мм (в); d2 = 1 мм (г) при f = 100 Гц.
a
б
в
г
Рис. 6. Конечно-элементное моделирование величины радиальной компоненты магнитной индукции при различных
глубинах скрытой коррозии: d2 = 0,01 мм (a); d2 = 0,1 мм (б); d2 = 0,5 мм (в); d2 = 1 мм (г) при f = 5000 Гц.
Приведенные выше выводы подтверждаются конечно-элементным моделированием. Результаты
моделирования изменения радиальной компоненты магнитной индукции при скрытой глубине при
Дефектоскопия
№ 8
2020
66
Фэн Цзян, Шулин Лю, Шаоджи Синь
f = 100 Гц и f = 5000 Гц показаны на рис. 5 и 6 соответственно. Распределение величины радиаль-
ной компоненты магнитной индукции хорошо видно по цветам. Как видно из рис. 5, поскольку
скрытая глубина коррозионного отверстия изменяется от 0,01 до 0,1 мм при f = 100 Гц, величина
радиальной компоненты магнитной индукции существенно не изменяется. При дальнейшем уве-
личении скрытой глубины коррозионного отверстия до 0,5 мм темная тень (величина отрицатель-
ной радиальной магнитной индукции больше 0,0008 Тл) на верхней поверхности образца умень-
шается, и форма тени становится близкой к эллиптической. В то же время цвет, соответствующий
величине радиальной компоненты магнитной индукции в области контроля, явно светлее, что
указывает на то, что величина магнитной индукции значительно снижается. Поскольку скрытая
глубина коррозионного отверстия увеличилась до 1 мм, цвет величины радиальной магнитной
индукции в области контроля немного светлее, чем у d2 = 0,5 мм, что указывает на то, что величи-
на магнитной индукции немного уменьшается, но незначительно. Параметры, представленные на
рис. 5, соответствуют характеристикам, показанным на рис. 4а. Это доказывает, что установленная
аналитическая модель верна и с ее помощью можно определить влияние скрытой глубины корро-
зии на магнитное поле поверхности.
При f = 5000 Гц темная тень на верхней поверхности образца значительно увеличивается, что
указывает на то, что величина радиальной компоненты магнитной индукции у поверхности образ-
ца значительно выше, чем при f = 100 Гц. Однако мы также видим, что форма темной тени все еще
близка к трапеции; несмотря на то, что скрытая глубина коррозионного отверстия изменяется, на
четырех диаграммах моделирования нет очевидных изменений. Таким образом, результаты моде-
лирования подтверждают, что высокая частота тока возбуждения может играть отрицательную
роль при контроле скрытой глубины коррозионного отверстия.
a
б
×10-3
×10-3
7
7
6
6
5
d2 = 0,01 мм
5
d2 = 0,01 мм
4
d2 = 0,5 мм
4
d2 = 0,5 мм
d2
= 1 мм
d2 = 1 мм
3
3
d2 = 1,5 мм
d2
= 1,5 мм
2
2
d2 = 2 мм
d2 = 2 мм
1
1
0 0
0,5
1
1,5
2
2,5
3
3,5
0 0
0,5
1
1,5
2
2,5
3
3,5
Радиальная компонента магнитной
Радиальная компонента магнитной
индукции Br, Тл
индукции Br, Тл
×10-3
в
×10-3
г
7
7
6
6
5
5
4
d2 = 0,01 мм
4
d2 = 0,01 мм
d2
= 0,5 мм
3
3
d2 = 0,5 мм
d2 = 1 мм
d2 = 1 мм
2
d2 = 1,5 мм
2
d2 = 1,5 мм
d2
= 2 мм
d2 = 2 мм
1
1
0
0
0,5
1
1,5
2
2,5
3
3,5
0 0
0,5
1
1,5
2
2,5
3
3,5
Радиальная компонента магнитной
Радиальная компонента магнитной
индукции Br, Тл
индукции Br, Тл
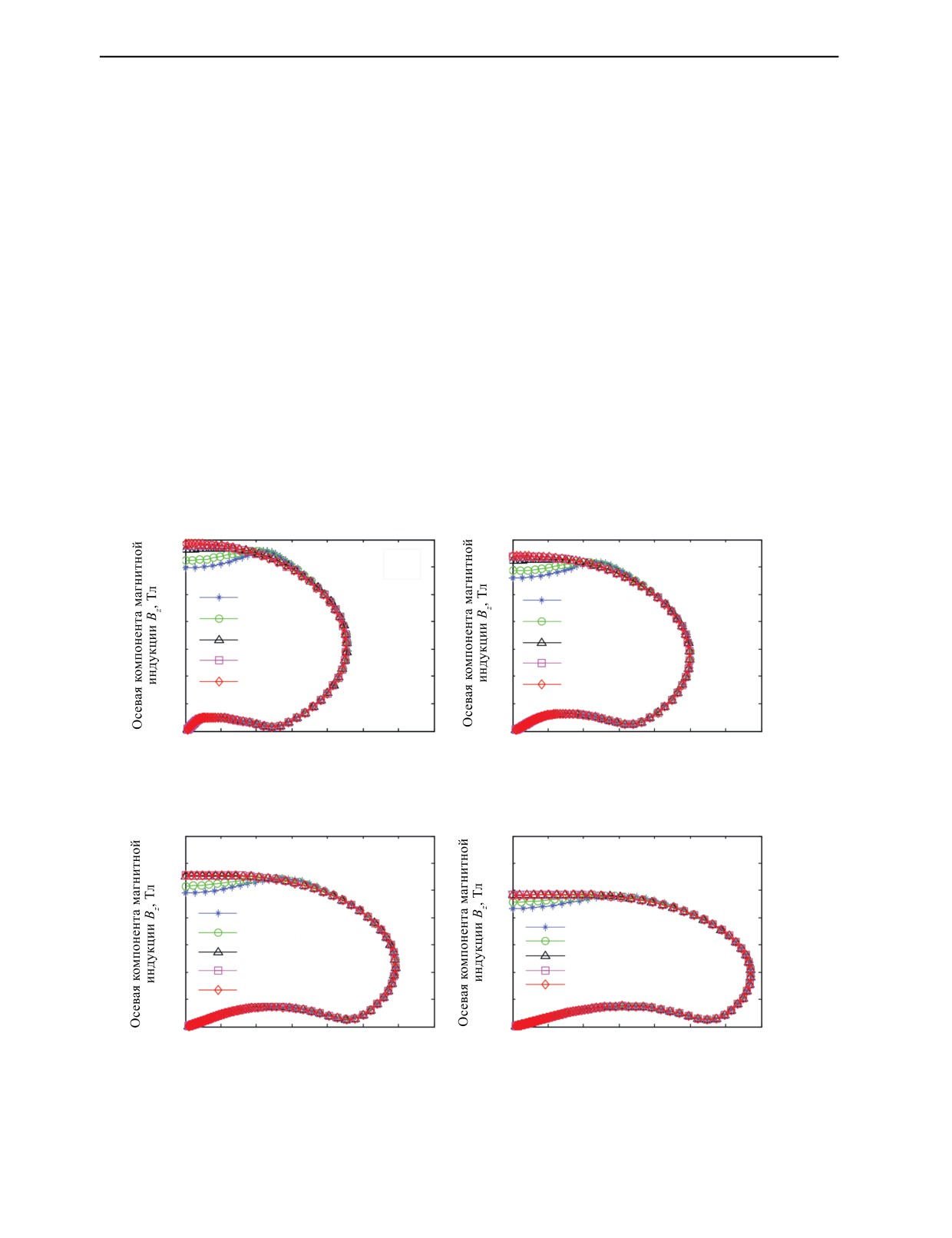
Рис. 7. Зависимость кривой от глубины скрытой коррозии при при f = 100 Гц (a), f = 500 Гц (б), f = 2000 Гц (в) и
f = 5000 Гц (г).
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
67
Аналогично, увеличение частоты тока возбуждения уменьшает величину осевой компоненты
магнитной индукции. Однако, в отличие от радиальной компоненты магнитной индукции, влияние
частоты тока возбуждения на изменение скрытой глубины не является очевидным. Когда скрытая
глубина коррозии изменяется от 0,01 до 2 мм, величина осевой компоненты магнитной индукции
не сильно зависит от различных частот тока возбуждения.
Как показано на рис. 7, графики изменяются при изменении скрытой глубины. Кроме того,
скрытая глубина имеет только определенное влияние на магнитное поле вблизи центра коррозион-
ного отверстия и оказывает незначительное влияние на поверхностное магнитное поле позади
него. Частота тока возбуждения не может изменить этот параметр. Частота тока возбуждения вли-
яет только на начальное положение графика. Когда частота тока возбуждения становится больше,
степень вогнутости на графике становится меньше. Поэтому для контроля более глубоких дефек-
тов целесообразно использовать низкую частоту тока возбуждения. Чем глубже скрытая глубина,
тем менее заметным становится углубление на графике и тем ближе он к бездефектной форме.
Анализ также показывает, что глубина вогнутости на графике все еще может использоваться в
качестве параметра для контроля скрытой глубины, и она подходит для более низких частот тока
возбуждения.
2.3. Влияние амплитуды тока возбуждения на магнитное поле поверхности
корродированной пластины
Геометрические параметры коррозии следующие: r1 = 1 мм, d1 = 0,5 мм, d2 = 0,1 мм, а часто-
та тока возбуждения составляет 1 кГц. Амплитуда тока возбуждения выбрана равной 0,01, 0,04,
0,1 и 0,2 А соответственно. На рис. 8 а—г показаны кривые величины радиальной компоненты
магнитной индукции, осевой компоненты магнитной индукции, фазы радиальной компоненты
магнитной индукции и фазы осевой компоненты магнитной индукции, изменяющиеся в соот-
ветствии с амплитудой тока возбуждения.
a
б
0,012
0,025
I = 0,01 А
I = 0,01 А
0,01
I = 0,04 А
I = 0,04 А
0,02
I = 0,1 А
I = 0,1 А
0,008
I = 0,2 А
I = 0,2 А
0,015
0,006
0,01
0,004
0,005
0,002
0
0 0
5
10
15
0
5
10
15
Расстояние r, мм
Расстояние r, мм
г
в
0
4
I = 0,01 А
-0,5
I = 0,04 А
-1
I = 0,1 А
2
I = 0,2 А
-1,5
I = 0,01 А
0
I = 0,04 А
-2
I = 0,1 А
-2,5
I = 0,2 А
-2
-3
-3,5
-4
0
5
10
15
0
5
10
15
Расстояние r, мм
Расстояние r, мм
Рис. 8. Зависимости величины радиальной компоненты магнитной индукции (a), величины осевой компоненты магнит-
ной индукции (б), фазы радиальной компоненты магнитной индукции (в) и фазы осевой компоненты магнитной индук-
ции от амплитуды тока возбуждения (г).
Дефектоскопия
№ 8
2020
68
Фэн Цзян, Шулин Лю, Шаоджи Синь
Как показано на рис. 8а, б, величина магнитной индукции увеличивается с увеличением
амплитуды тока возбуждения и демонстрирует линейную пропорциональную зависимость.
Это пропорциональное соотношение может быть проверено с помощью уравнений (30)—(32).
Амплитуда тока возбуждения не изменяет распределение индукции магнитного поля, то есть
независимо от величины радиальной компоненты магнитной индукции или величины осевого
компоненты магнитной индукции форма кривой не изменяется. Поэтому характеристические
параметры неизменны при контроле коррозии в плоском проводнике. Улучшение чувствитель-
ности контроля выгодно при оценке параметров коррозии с использованием датчиков магнит-
ного поля. Поскольку амплитуда тока возбуждения имеет одинаковое влияние на параметры
коррозии (такие как глубины коррозии), влияние частоты тока возбуждения и амплитуды тока
возбуждения на величину магнитной индукции различаются существенным образом. Как
показано на рис. 8в, г, фаза магнитной индукции не изменяется с увеличением амплитуды тока
возбуждения. При контроле коррозии, когда фазу магнитной индукции используется в каче-
стве характеристического параметра, никакого эффекта не может быть получено путем изме-
нения амплитуды тока возбуждения. Согласно приведенному выше анализу, хоть фаза магнит-
ной индукции и изменяется с частотой тока возбуждения, она не чувствительна к параметрам
коррозии. Это похоже на фазу магнитной индукции, которая нечувствительна к амплитуде тока
возбуждения.
ЗАКЛЮЧЕНИЕ
1. При увеличении частоты тока возбуждения величина радиальной компоненты магнитной
индукции увеличивается, тогда как величина осевой компоненты магнитной индукции уменьша-
ется. Обнаружено, что увеличение частоты тока возбуждения снижает чувствительность контроля
для меньших отверстий.
2. По мере увеличения частоты график расширяется по горизонтали и сжимается по верти-
кали. При различных частотах тока возбуждения изменение магнитного поля, вызванное изме-
нением радиуса коррозии, также различно на графике. Поэтому для определения радиуса
коррозии должна быть выбрана подходящая частота тока возбуждения, например, f = 500 Гц.
Скрытая глубина оказывает определенное влияние только на магнитное поле вблизи коррози-
онного отверстия, и чем больше частота тока возбуждения, тем меньше степень вогнутости
графика.
3. В отличие от частоты тока возбуждения амплитуда тока возбуждения одинаково влияет на
параметры коррозии и пропорциональна величинам радиальной и осевой компонент магнитной
индукции. Фазы радиальной и осевой магнитной индукции не зависят от амплитуды тока воз-
буждения.
Работа поддержана Национальным фондом естественных наук Китая (51575331 и 51175316).
СПИСОК ЛИТЕРАТУРЫ
1. Garcia-Martin J., Gomez-Gil J., Vazquez-Sanchez E. Non-destructive techniques based on eddy current
testing // Sensors. 2011. V. 11. No. 3. P. 2525—2565.
2. Xin J., Lei N., Udpa L., Udpa S.S. Rotating field eddy current probe with bobbin pickup coil for steam
generator tubes inspection // NDT&E Int. 2013. V. 54. No. 3. P. 45—55.
3. Efimov A.G. Development of adaptive eddy-current instruments for flaw sizing // Russ. J. Nondestr.
Test. 2010. V. 46. No. 10. P. 780—788.
4. Chen Z., Yusa N., Miya K. Some advances in numerical analysis techniques for quantitative
electromagnetic nondestructive evaluation // Nondestruct. Test Eval. 2009. V. 24 (1—2). P. 69—102.
5. Salemi A.H., Sadeghi S.H.H., Moini R. Thin-skin analysis technique for interaction of arbitrary-shape
inducer field with long cracks in ferromagnetic metals // NDT&E Int. 2004. V. 37. P. 471—479.
6. Bowler J.R., Theodoulidis T.P. Coil impedance variation due to induced current at the edge of a
conductive plate // J. Phys. D: Appl. Phys. 2006. V. 39. No. 13. P. 2862—68.
7. Bowler J.R., Theodoulidis T.P. Eddy currents induced in a conducting rod of finite length by a coaxial
encircling coil // J. Phys. D: Appl. Phys. 2005. V. 38. No. 16. P. 2861—68.
8. Bowler J.R., Theodoulidis T.P., Poulakis N. Eddy current probe signals due to a crack at a right-angled
corner // IEEE Trans. Magn. 2012. V. 48. No. 12. P. 4735—46.
9. Jiang F., Liu S.L., Xiao S.G. Quantitative estimation of rectangular surface crack based on the 2-D
modeling of surface magnetic field with long straight rectangular wire // IEEE Trans. Magn. 2018. V. 54.
No. 5. P. 1—12.
Дефектоскопия
№ 8
2020
Влияние амплитуды и частоты тока возбуждения на оценку коррозии...
69
10. Jiang F., Liu S.L. Evaluation of cracks with different hidden depths and shapes using surface magnetic
field measurements based on semi-analytical modelling // J. Phys. D: Appl. Phys. 2018. V. 51. No. 12.
P. 125002.
11. Goldstein A.E., Kalganov S.A. Eddy-current nondestructive testing of long cylindrical components
using spatial magnetic field components of different frequencies // Russ. J. Nondestr. Test. 2000. V. 36. No. 5.
P. 360—365.
12. Karpenko O., Ye C., Udpa L. Dual frequency fusion for defect signal enhancement in EC-GMR
inspection of riveted multilayer structures // NDT&E Int. 2017. V. 92. P. 97—103.
Дефектоскопия
№ 8
2020