УДК 620.179.162
МОДЕРНИЗАЦИЯ ЭХОМЕТОДА УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ
© 2021 г. В.Г. Карташев1,*, Э.И. Трунов1,**, Е.В. Шалимова1,***, Р.В. Концов1
1Национальный исследовательский университет «МЭИ»,
Россия 111250 Москва, ул. Красноказарменная, 14
E-mail: *kartashevvg@mail.ru; **ediktrunov@mail.ru; ***shalimovayv@mail.ru
Поступила в редакцию 28.04.2021; после доработки 24.09.2021
Принята к публикации 08.10.2021
Рассматривается модернизация эхометода ультразвуковой дефектоскопии, отличающейся тем, что кроме решетки
преобразователей, контактирующих с рабочей (передней) поверхностью объекта, дополнительно используется один или
несколько приемных преобразователей на боковой поверхности объекта. Данный способ расположения антенных реше-
ток позволяет существенно улучшить разрешающую способность, а в случае использования антенной решетки на боко-
вой поверхности объекта — получить дополнительную информацию для построения изображения внутренней структу-
ры объекта. С целью получения потенциальной разрешающей способности используется сверхширокополосный зонди-
рующий сигнал с гауссовской огибающей в комбинации с оригинальным алгоритмом обработки сигналов, включающий
в себя суммирование, одностороннее ограничение и перемножение принятых сигналов. В работе даны некоторые
практические рекомендации. Проведена оценка потенциальной разрешающей способности в различных направлениях.
Ключевые слова: ультразвуковая дефектоскопия, разрешающая способность, антенная решетка, алгоритм, сверх-
широкополосный сигнал, обработка сигналов.
DOI: 10.31857/S0130308221110038
ВВЕДЕНИЕ
Ультразвуковая (УЗ) дефектоскопия является одним из самых распространенных методов не-
разрушающего контроля изделий. При этом наиболее информативным является эхометод, при ко-
тором излучающие и приемные преобразователи располагаются на одной и той же стороне объекта
[1, 2]. Эхометод позволяет не только обнаружить дефекты и элементы структуры объекта, но и
определить их координаты.
Расстояние до дефекта обычно измеряется посредством измерения временной задержки сигна-
ла, точность измерения которой зависит от длительности зондирующего импульса.
Разрешающая способность по координате, параллельной зондируемой поверхности объекта,
обеспечивается решеткой ультразвуковых преобразователей (антенной решетки), находящейся в
акустическом контакте с поверхностью объекта. Чем больше размеры апертуры антенной решет-
ки, тем выше разрешающая способность. На практике, как правило, разрешающая способность
по глубине, которая обеспечивается измерением задержки сигнала, оказывается лучше, чем раз-
решающая способность в поперечном направлении, которая обеспечивается размерами антенной
решеткой. К тому же, разрешающая способность в поперечном направлении обычно ухудшается
по мере продвижения вглубь объекта.
Этот недостаток можно преодолеть, если есть возможность разместить на боковой поверхности
объекта один или несколько дополнительных приемных преобразователей [8]. Наличие дополни-
тельных приемных преобразователей на боковой поверхности позволяет существенно увеличить
разрешающую способность в поперечном направлении (вдоль координаты х на рис. 1).
А если на боковой поверхности объекта расположить не один преобразователь, а антенную
решетку, параллельную оси z (см. рис. 1), то это позволит получить дополнительную информацию,
необходимую для построения трехмерного изображения внутренней структуры объекта.
ВЫБОР ЗОНДИРУЮЩЕГО СИГНАЛА
Разрешающая способность по дальности зависит от длительности сигнала: чем меньше дли-
тельность зондирующего сигнала, тем лучше получается разрешающая способность. Поэтому в
качестве зондирующих сигналов должны использоваться короткие видеоимпульсы. Однако необ-
ходимо учитывать, что пьезопреобразователи имеют конечную полосу пропускания в окрестности
резонансной частоты, и видеоимпульс, проходя через них, превращается в знакопеременный ра-
диоимпульс. Как показано в [3], минимальную длительность при фиксированной ширине спектра
имеет гауссов импульс.
Модернизация эхометода ультразвуковой дефектоскопии
25
z
АР2
Д
1
AP1
2
1
2
3
N1
3
x
N2
y
Рис. 1. Схема зондирования объекта.
Учитывая это обстоятельство, в качестве математической модели реального зондирующего
сигнала при математическом моделировании мы будем рассматривать короткий радиоимпульс с
гауссовой огибающей:
2
t
f t)
=U
exp
−
cos
(
ω
t
)
,
(1)
2
0
τ
где U — амплитуда сигнала; ω0 — центральная частота спектра; τ — параметр, характеризующий
ширину огибающей.
Зондирующий сигнал с гауссовой огибающей может быть получен при прохождении короткого
видеоимпульса через преобразователи, форма частотной характеристики которых близка к гаус-
совой кривой. Параметр τ выбирается таким образом, чтобы обеспечить минимальный уровень
боковых лепестков сигнала, что позволяет минимизировать уровень ложных сигналов при возмож-
ности его практической реализации. На рис. 2а приведена временная диаграмма радиоимпульса с
гауссовой огибающей при τ = 3,33/ω0 , а на рис. 2б — его спектр.
а
б
1
1
0,7
0,8
0,4
0,6
0,1
0,4
-0,2
0,2
-0,5
0
-0,02 -0,012
-4×10-3
4×10-3
0,012
0,02
0
50
100
150
200
Время, с
Частота, кГц
Рис. 2. Зондирующий сигнал (а) и его спектр (б).
Сигнал с параметром τ = 3,33/ω0 во временной области имеет незначительный уровень положи-
тельных боковых лепестков (около 3 %), что позволяет минимизировать уровень ложных сигналов.
Если уменьшить значение параметра τ, уровень боковых лепестков станет еще меньше, однако
практическая реализация такого сигнала может оказаться проблематичной. Поэтому рассматривае-
мый сигнал близок к предельно достижимому, а разрешающую способность метода при использо-
вании такого сигнала можно рассматривать как потенциально возможную.
Дефектоскопия
№ 11
2021
26
В.Г. Карташев, Э.И. Трунов, Е.В. Шалимова, Р.В. Концов
Еще одно преимущество рассматриваемого сигнала состоит в том, что если при обработке сиг-
налов проводить ограничение сигналов снизу (т.е. обнулять отрицательные значения сигналов), то
оставшаяся часть сигнала будет представлять собой видеоимпульс длительностью в половину пе-
риода колебания с частотой ω0. Это позволит реализовать максимально возможную разрешающую
способность при заданной частоте зондирующего сигнала.
АЛГОРИТМЫ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ
ВНУТРЕННЕЙ СТРУКТУРЫ ОБЪЕКТА
Возможны различные варианты алгоритмов обработки сигналов, позволяющих построить изо-
бражение внутренней структуры объектов применительно к схеме размещения преобразователей,
приведенной выше на рис. 1.
Наиболее простой алгоритм, позволяющий построить изображение при минимальном числе
математических операций, использует только один излучающий преобразователь (ИП), входящий
в состав антенной решетки АР1, расположенной на передней стороне объекта (см. рис. 1). Все
остальные преобразователи в обеих антенных решетках работают как приемные. Зондирующий
сигнал отражается от дефектов и элементов структуры объекта; отраженные сигналы принимаются
приемными преобразователями, усиливаются и сохраняются в памяти компьютера для последую-
щей обработки. Сигнал, принимаемый i-м приемным преобразователем антенной решетки АР1,
обозначим как u1i(t), а сигнал, принимаемый j-м преобразователем решетки АР2, — как u2j(t).
Зондирующий сигнал, отраженный от заданной точки Р и пришедший на приемные преобра-
зователи, можно записать в виде: u1i(t) = A · f(t - t1i) для i-го приемного преобразователя антенной
решетки АР1 и u2j(t) = A · f(t - t2j) для j-го преобразователя решетки АР2. Коэффициент A пропор-
ционален коэффициенту отражения зондирующего сигнала в выбранной точке, f(t) — функция,
описывающая форму зондирующего сигнала. Временные задержки сигналов t1i и t2j вычисляются
по формулам: t2j = l2j / C, t1i = l1i / C, где С — скорость УЗ волны; l1i — длины путей от ИП до вы-
бранной точки Р и далее до i-го преобразователя антенной решетки АР1; l2j — длины путей от ИП
до выбранной точки Р и далее до j-го преобразователя антенной решетки АР2.
Сигналы, пришедшие на приемные преобразователи, суммируются с такими задержками, что-
бы обеспечить синхронное сложение всех сигналов, отраженных от выбранной точки Р. Практиче-
ски у принятых сигналов берется единственное значение, соответствующее задержке при отраже-
нии от выбранной точки Р, и эти значения суммируются. В результате при суммировании сигналов,
принятых преобразователями антенной решетки АР1 получается значение S1 = N1A · f(0), где N1
— число приемных преобразователей АР1. Аналогично для антенной решетки АР2 получается
значение S2 = N2A · f(0), где N2 — число приемных преобразователей АР2.
После этого сигналы от обеих антенных решеток подвергаются одностороннему ограничению
(т.е. обнуляются отрицательные значения) и перемножаются:
S0(x, y, z) = S1огр · S2огр,
(2)
S1,
если
S1>
0
S2,
если
S2
>
0
где
S1
,
S2
огр
=
огр
=
0,
если
S1≤
0
0,
если
S2
≤
0
В результате для каждой точки пространства получается значение S0, пропорциональное ква-
драту коэффициента отражения от выбранной точки Р с координатами (x, y, z), а также оно зависит
от напряженности поля, формируемого излучателями в данном конкретном месте. Повторяя эту
процедуру для других точек пространства, можно получить изображение внутренней структуры
объекта. Реализация этого алгоритма подробно рассмотрена в [8]. В результате расчетов в соот-
ветствии с изложенным выше алгоритмом получаются значения S0, пропорциональные квадрату
коэффициента отражения. Это бывает удобно, если нужно выделить сильный сигнал и уменьшить
более слабые, например, ослабить отражения от структурных неоднородностей материала. Если
же нужно получить «пропорциональную» картину, то из результатов расчетов величины S0 следует
извлекать квадратный корень.
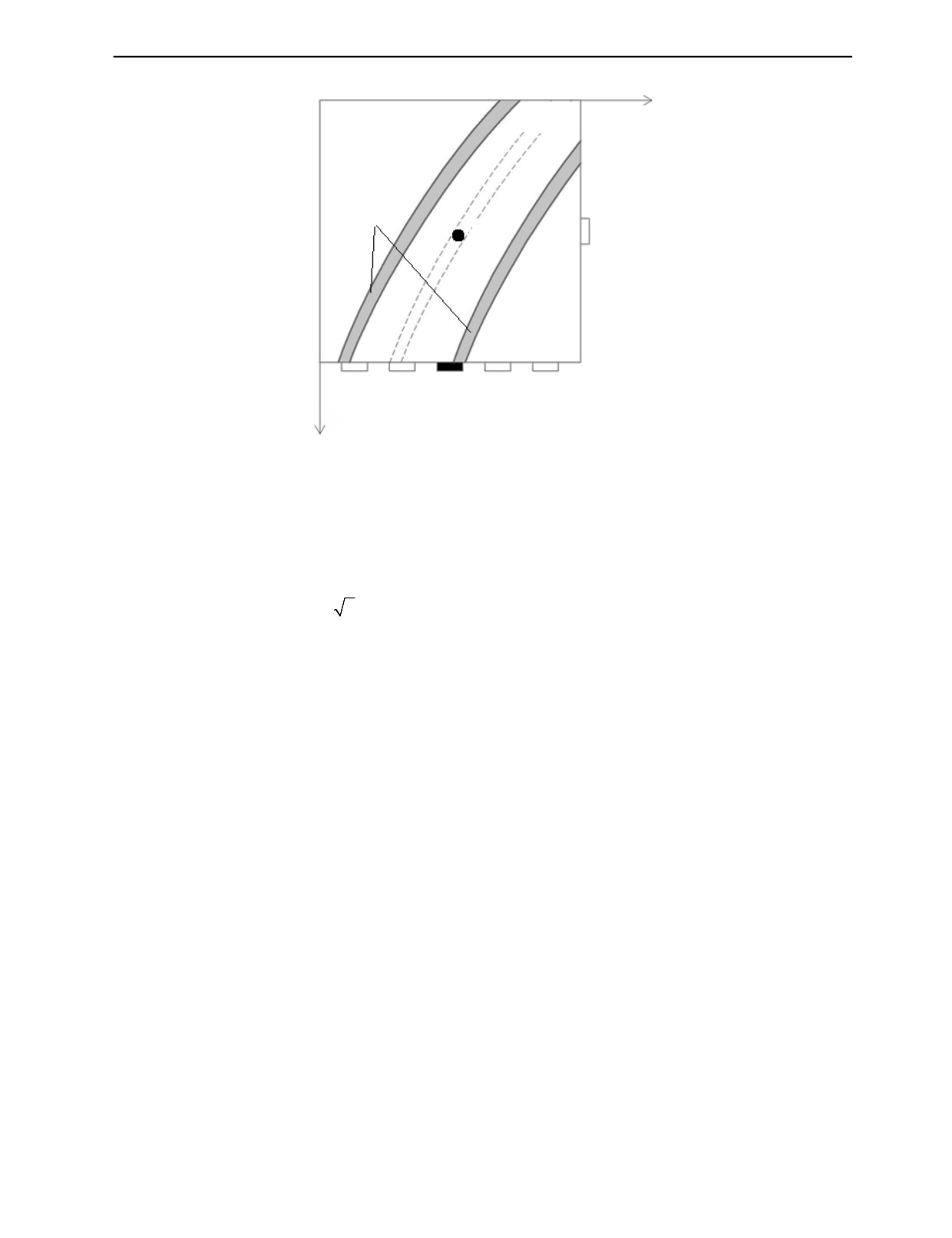
Недостатком рассмотренного выше простого алгоритма является наличие «слепых» зон, где
происходит подавление слабого сигнала более сильным. Если расстояния для двух отражателей
различается на половину длины волны, то максимум одного сигнала накладывается на отрицатель-
ный полупериод второго и происходит их взаимная компенсация. Если сигналы имеют одинаковую
Дефектоскопия
№ 11
2021
Модернизация эхометода ультразвуковой дефектоскопии
27
x
Зона
видимости
АР2
«Слепые»
зоны
Д
AP1
ИП
y
Рис. 3. Схема образования «слепых» зон.
амплитуду, то каждый из них ослабляется не более чем в 2 раза, и они хорошо различимы на изо-
бражении структуры объекта. Если же сигналы различаются по амплитуде более чем в 2 раза, то
происходит полное или почти полное подавление более слабого сигнала. При этом сильный сигнал
ослабляется незначительно. «Слепые» зоны, где происходит подавление слабых сигналов, имеют
вид эллипсовидных полос (см. рис. 3).
Каждому сильному отражателю соответствуют две таких полосы, ширина каждой из них
приблизительно равна λ / (2 2) . Между ними располагается зона, где сигналы совпадают по
фазе. Если слабый сигнал попадает в эту зону, то он, складываясь с сильным сигналом, как бы
усиливается в несколько раз.
Подавление слабых сигналов — явление неопасное и даже желательное, если надо выделить
один сигнал от наиболее сильного отражателя. Однако, если нужно получить полную информацию
о структуре объекта, с этим явлением необходимо бороться.
Если не усложнять систему преобразователей, то наиболее простой выход из положения состо-
ит в следующем. Зондирование нужно проводить с помощью нескольких ИП, работающих пооче-
редно и расположенных в разных местах антенной решетки АР1. При этом положение «слепых»
зон, которые представляют собой узкие полосы, будет меняться. После каждого зондирования
производится обработка принятых сигналов в соответствии с изложенным выше алгоритмом и
формируется изображение структуры объекта. Изображения, полученные с помощью разных ИП,
суммируются. При этом, если слабый отражатель попал в «слепую» зону при одном положении
ИП, то при другом положении ИП велика вероятность, что он в «слепую» зону не попадет. Если
число зондирований из разных позиций достаточно велико, то происходит сглаживание, а после
извлечения квадратного корня картина еще больше нивелируется и, в итоге, картина слабо отлича-
ется от истинной.
Чем больше число излучающих преобразователей, тем лучше качество изображения. В пре-
дельном случае мы получаем режим SAFT или SAFT-C [4, 5], когда каждый элемент решетки АР1
поочередно работает как излучающий. Этот режим не только позволяет получить высокое качество
изображения, но и обеспечивает эффективное подавление шумов.
Если возникает задача получения адекватного изображения наиболее простыми методами, то
число излучающих преобразователей должно быть не меньше трех.
ОЦЕНКА РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ
Оценка разрешающей способности рассматриваемого метода проводилась с помощью мате-
матического моделирования. Моделирование осуществлялось в пакете прикладных программ
MATLAB. В качестве зондирующего сигнала использовался короткий радиоимпульс с гауссовой
Дефектоскопия
№ 11
2021
28
В.Г. Карташев, Э.И. Трунов, Е.В. Шалимова, Р.В. Концов
огибающей, описываемый выражением (1) при заданном τ = 3,33/ω0. Такой сигнал после операции
ограничения имеет незначительный уровень боковых лепестков (около 0,03), которые практически
не влияют на качество изображения. Использовать еще более короткие импульсы не имеет смысла,
так как это практически не улучшит разрешающую способность, а формирование таких сигналов
может представлять неоправданно сложную задачу. Поэтому можно считать, что результаты данно-
го моделирования позволяют оценить потенциальную разрешающую способность метода.
Предполагалось, что отражатели — точечные, а отраженная УЗ волна будет равномерно рассеи-
ваеться во всех направлениях. При моделировании не учитывались ослабление сигнала в процессе
распространения и диаграммы направленности преобразователей. Эти факторы слабо влияют на
разрешающую способность, пока отношение сигнал/шум остается достаточно большим. Однако
при сильном частотно-зависимом затухании УЗ волн в среде спектр сигнала сужается и смещает-
ся в сторону более низких частот. При этом длительность сигнала увеличивается, что приводит к
ухудшению разрешающей способности.
Разрешающая способность в разных направлениях определяется разными физическими про-
цессами: в плоскости х0у она определяется точностью измерения задержки сигналов, а в направ-
лении координаты z — фокусировкой УЗ волн антенной решеткой АР2. Поэтому разрешающую
способность в разных направлениях мы будем рассматривать раздельно.
Для оценки потенциальной разрешающей способности нет необходимости моделировать пол-
ный алгоритм обработки сигналов. Достаточно использовать простейший алгоритм, в котором ра-
ботает только один излучающий преобразователь.
При моделировании предполагалось, что каждая АР содержала 21 элемент. Шаг АР (расстоя-
ние между соседними элементами) составлял 0,75λ, апертура каждой АР — 15λ. Моделировалось
отражение от двух точечных отражателей, расположенных напротив середины каждой АР на не-
большом расстоянии друг от друга; расстояние до каждой АР составляло около 10λ.
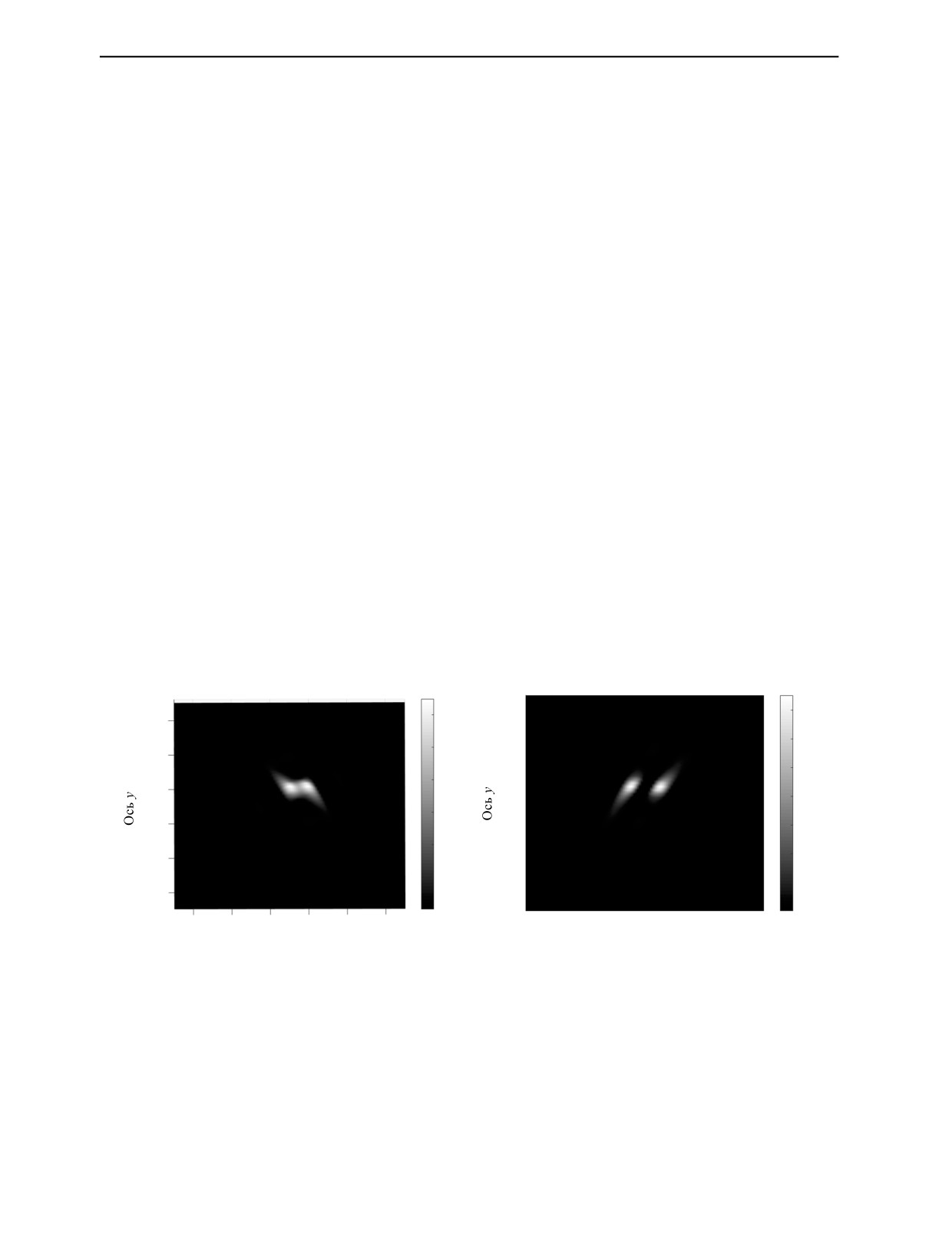
Рассмотрим сначала разрешающую способность в плоскости х0у. Как показали результаты
моделирования, разрешающая способность зависит от взаимного расположения отражателей и от
степени различия коэффициентов отражения от этих отражателей. Наилучшая разрешающая спо-
собность получается, если отражатели равновеликие. В этом случае два отражателя успешно раз-
личаются, если расстояние между ними вдоль координаты x превышает 0,6λ (см. рис. 4б) или если
расстояние между ними вдоль координаты y превышает 0,2λ (см. рис. 5).
а
б
300
11
350
11
300
250
10,5
10,5
250
200
10
10
200
150
9,5
9,5
150
100
100
9
9
50
50
8,5
8,5
0
0
-2
-1
0
1
2
3
3
2
1
0
-1
-2
Ось x
Ось x
Рис. 4. Изображение двух точечных отражателей, разнесенных в направлении оси х на 0,5λ (а) и на 0,7λ (б).
В промежуточных направлениях разрешающая способность принимает промежуточные зна-
чения. При очень маленьком расстоянии между отражателями отраженные сигналы частично на-
кладываются друг на друга и происходит их частичная взаимная компенсация: у верхнего отража-
теля ослабляется правая сторона, а у нижнего — левая. В результате на изображении (рис. 5а) они
оказываются не точно один над другим, хотя в модели для них установлены одинаковые значения
координаты х. При увеличении расстояния между отражателями (рис. 5б) этот эффект перестает
проявляться.
Дефектоскопия
№ 11
2021
Модернизация эхометода ультразвуковой дефектоскопии
29
а
б
8
400
400
8,5
9,5
350
350
9
300
10
300
9,5
250
250
10,5
10
200
200
10,5
150
11
150
100
11
100
50
11,5
11,5
50
0
12
12
0
-4
-3
-2
-1
0
1
2
3
4
-3
-2
-1
0
1
2
Ось x
Ось x
Рис. 5. Изображение двух точечных отражателей, разнесенных в направлении оси у на 0,21λ (а) и на 1,5λ (б).
Изображения на рис. 4 и 5 соответствуют предельной разрешающей способности, когда равно-
великие сигналы, отраженные от соседних отражателей, разнесены во времени только на половину
периода, поэтому частично компенсируют друг друга, но все же хорошо различимы. Но если при
таком же расстоянии между отражателями сигналы различаются по амплитуде более, чем в 2 раза,
то происходит подавление слабого сигнала сильным. Поэтому для отражателей разной величины
разрешающая способность получается в 2 раза хуже, чем для одинаковых отражателей.
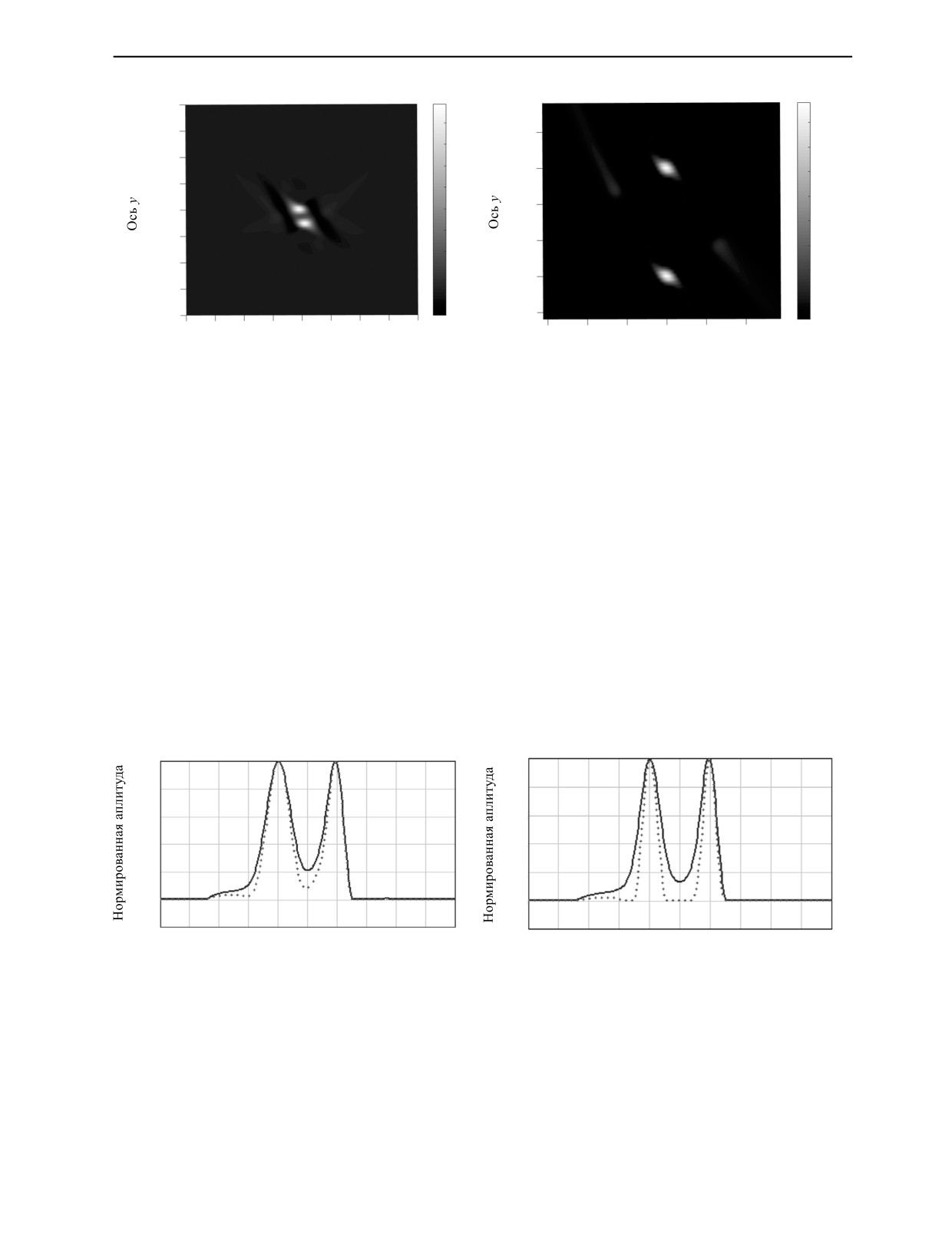
Разрешающая способность в направлении координаты z обеспечивается антенной решет-
кой АР2. Чем больше размер апертуры АР2, тем лучше разрешающая способность. Однако при
очень больших размерах апертуры антенной решетки АР2 рост разрешающей способности за-
медляется из-за того, что сигнал на крайние элементы АР2 приходит более ослабленным, чем
на центральные элементы решетки. Этот эффект усиливается при сильном затухании УЗ волн
в среде, а также из-за того, что ДН преобразователей, входящих в состав АР2, не является все-
направленной. В качестве примера на рис. 6 представлены графики сечения изображения двух
отражателей, расположенных на расстоянии 2λ друг от друга при числе элементов решетки АР2
N2 = 21 (рис. 7а) и N2 = 51 (рис. 6б).
а
б
1
1
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0
0
-0,2
-0,2
-4 -3
-2
-1
0
1
2
3
4
5
6
-4
-3
-2
-1
0
1
2
3
4
5
6
Ось z
Ось z
Рис. 6. Сечение изображения двух точечных отражателей, разнесенных в направлении оси z на 2λ:
а — при 21-элементной решетке АР2; б — при 51-элементной решетке АР2.
Шаг антенной решетки предполагался равным 0,8λ, расстояние от отражателей до решетки
АР2 — 10λ. Пунктирная линия соответствует идеальному варианту, когда ДН преобразователей —
всенаправленные, а затухание УЗ волн в среде отсутствует. Сплошная линия соответствует ситуа-
ции, когда ДН преобразователей описывается выражением F(θ) = cos θ, а затухание УЗ волн в среде
составляет 0,2 непера на длину волны или 44 дБ/м при длине волны 40 мм (усредненные данные
Дефектоскопия
№ 11
2021
30
В.Г. Карташев, Э.И. Трунов, Е.В. Шалимова, Р.В. Концов
для бетонных конструкций). Анализируя результаты моделирования, можно сделать вывод, что нет
смысла использовать антенные решетки с очень большой апертурой; размер апертуры решетки
АР2 не должен сильно превышать расстояние от АР2 до исследуемой области объекта контроля.
НЕКОТОРЫЕ ПРАКТИЧЕСКИЕ РЕКОМЕНДАЦИИ
Проведенный анализ позволяет сформулировать некоторые рекомендации по выбору параме-
тров антенных решеток.
В отличие от антенной решетки АР2, размеры апертуры решетки АР1 почти не влияют на раз-
решающую способность по координате z. Основное предназначение этой АР — препятствовать
формированию ложных сигналов (формированию изображений ложных отражателей). Ложные
изображения могут возникать при маленькой апертуре решетки АР1, когда объект контроля со-
держит несколько отражателей. В процессе обработки сигналов может сложиться ситуация, когда
при перемножении сигналов S1 и S2 в соответствии с формулой (2) накладываются друг на друга и
перемножаются сигналы, принадлежащие разным отражателям. В результате формируется ложное
изображение отражателя. Чтобы это не происходило, необходимо осуществлять предварительную
пространственную селекцию отражателей с помощью антенной решетки АР1. Для этого решетка
АР1 должна иметь достаточно большую апертуру. Как показали результаты моделирования, для
успешного выполнения этой функций размеры апертуры решетки АР1 должны быть не меньше,
чем расстояние до обследуемой области контролируемого объекта.
При оценке разрешающей способности с помощью математического моделирования шаг обеих
АР был принят равным 0,75λ. Однако, как показали последующие исследования, такие же резуль-
таты получаются при шаге АР, равном длине волны или даже чуть больше. Но если шаг АР превы-
шает 1,2λ, возможно формирование ложных сигналов.
Преобразователи, входящие в состав антенных решеток, должны иметь широкую диаграмму
направленности. Это могут быть либо малоапертурные преобразователи продольных акустических
волн с диаграммой направленности вида F(θ) = cos θ, либо преобразователи с сухим точечным кон-
тактом [6, 7], имеющие еще более широкую диаграмму направленности.
Второе требование, предъявляемое к преобразователям, — широкая полоса пропускания. Она
должна быть достаточной для прохождения рассмотренных выше сверхширокополосных радио-
импульсов. При недостаточно широкой полосе пропускания преобразователей длительность зон-
дирующих импульсов будет увеличиваться, что приведет к ухудшению разрешающей способности.
Возможны различные модификации рассматриваемого метода УЗ дефектоскопии. Например, не
всегда есть возможность разместить многоэлементную АР на боковой поверхности. В этих случаях
приходится ограничиться короткой антенной решеткой или даже единичным приемным преобра-
зователем на боковой поверхности объекта. Такая конфигурация антенной системы не позволяет
получить разрешение в направлении координаты z, но наличие даже одного приемного преобразо-
вателя на боковой поверхности объекта в сочетании с изложенным выше алгоритмом позволяет в
несколько раз увеличить разрешающую способность в направлении координаты х по сравнению с
традиционной схемой, когда используется только одна антенная решетка на передней поверхности
объекта. На рис. 7 приведены результаты моделирования при разном количестве элементов в АР.
1
N1 = 7 N2 = 0
0,9
N1 = 7 N2 = 5
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
–60,04 -60,03 -60,02 -60,01
-60 -59,99 -59,98 -59,97 -59,96
Ось x, м
Рис. 7. Сечения для разных размеров антенной решетки в направлении координаты х.
Дефектоскопия
№ 11
2021
Модернизация эхометода ультразвуковой дефектоскопии
31
Рассмотренную антенную систему можно модифицировать для того, чтобы получить хоть
какую-то разрешающую способность в направлении координаты z. Для этого можно каждый эле-
мент антенной решетки АР1 выполнить в виде нескольких параллельно соединенных преобразова-
телей, расположенных по прямой линии, параллельной оси z.
Основная область применения рассматриваемого метода, как нам представляется, — нераз-
рушающий контроль строительных конструкций из бетона и других материалов с неоднородной
структурой. Метод может быть использован и для контроля состояния круглых колонн; при этом
антенная решетка АР1 должна иметь дугообразную форму и должны быть скорректированы рас-
четные формулы, которые используются в алгоритме обработки сигналов.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
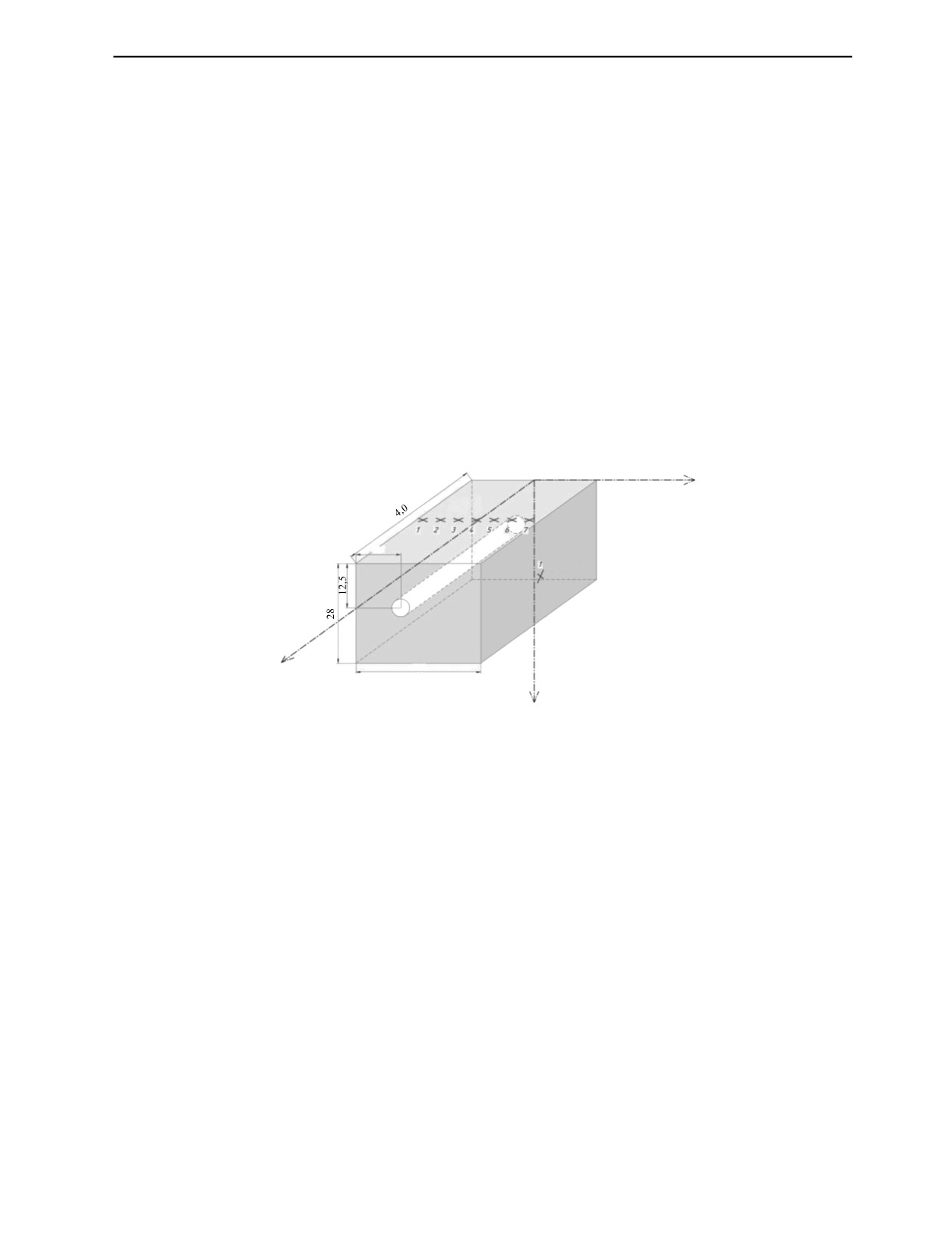
Для проверки работоспособности предложенного метода был проведен эксперимент. В качестве
объекта контроля использовался бетонный блок (марка бетона М300) с размерами 350×400×280 мм
(см. рис. 8) с искусственным дефектом в виде отверстия. Диаметр отверстия равен 50 мм. В каче-
стве зондирующего сигнала был взят один период синуса длительностью 20 мкс и амплитудой
10 В. Для такого сигнала центральная частота 50 кГц, ширина спектра 50 кГц. Выбор такой низкой
частоты обусловлен неоднородностью внутренней структуры бетона, приводящей к высокому зна-
чению затухания ультразвуковых колебаний.
x
AP1
12,5
АР2
y
35
z
Рис. 8. Объект контроля.
Для возбуждения и приема продольных волн использовались пьезоэлектрические преобразова-
тели (ПЭП) фирмы «Акустические контрольные системы» с артиклем S1803. Датчики были объ-
единены в две АР — АР1 и АР2, которые располагались сверху и сбоку контролируемого объекта,
соответственно (рис. 9). Расстояние между соседними элементами АР d = 30 мм.
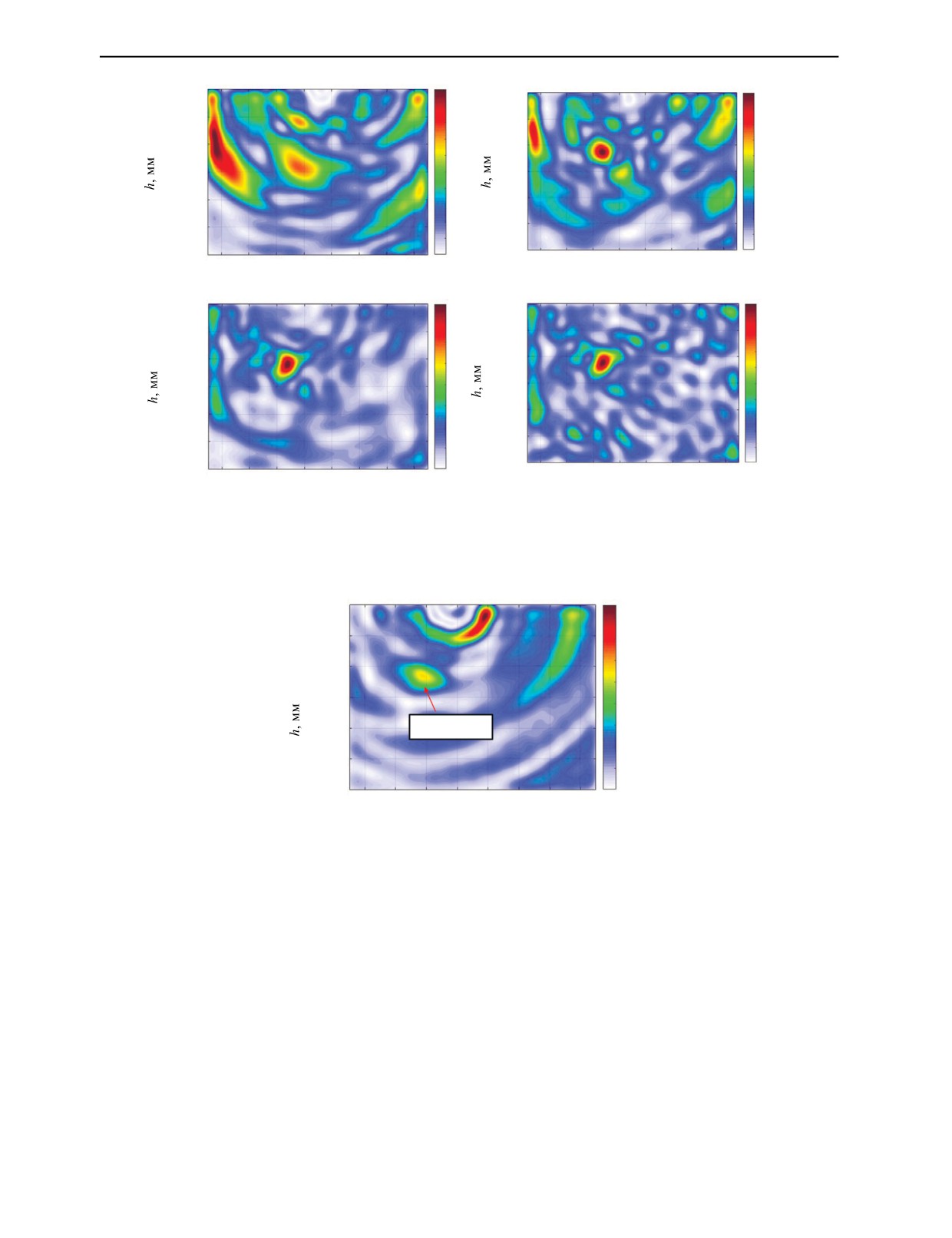
Результаты эксперимента представлены на рис. 9. В зависимости от числа элементов, вхо-
дящих в состав антенных решеток АР1 и АР2, изменялась картина изображения. Картина вну-
тренней структуры, представленная на рис. 9а, содержит ложные отражатели и не позволяет
получить изображение отверстия. Это связано с недостаточным числом ПЭП АР1. Добавление
даже одного элемента второй антенной решетки АР2 приводит к существенному улучшению
изображения даже при недостаточном числе элементов АР1 и позволяет получить изображение
отверстия (рис. 9б), что подтверждает эффективность предложенного метода. Увеличение числа
элементов решетки АР1 приводит к улучшению качества изображения, что видно из сравнения
рис. 9а и 9в.
Добавление элементов антенной решетки АР2, расположенной на боковой поверхности, приво-
дит к улучшения разрешающей способности и, соответственно, к улучшению качества изображе-
ния внутренней структуры объекта, что видно из сравнения рис. 9в и 9г.
Для сравнения приведем картину изображения (см. рис. 10) при обычном алгоритме SAFT-C.
Результаты проведенных экспериментов показали, что в случае использования предложенного
алгоритма обработки пятно имеет более выраженный цвет и очертание, что говорит о лучшей раз-
решающей способности.
Дефектоскопия
№ 11
2021
32
В.Г. Карташев, Э.И. Трунов, Е.В. Шалимова, Р.В. Концов
0
1
0
1
0,9
0,9
-50
0,8
-50
0,8
-100
0,7
0,7
-100
0,6
0,6
-150
0,5
-150
0,5
0,4
0,4
-200
-200
0,3
0,3
0,2
0,2
-250
-250
0,1
0,1
-300
-300
-150 -100 -50
0
50
100 150 200
-150 -100 -50 0
50
100 150 200
x, мм
x, мм
×10-3
0
0
1
7
0,9
-50
-50
6
0,8
0,7
-100
5
-100
0,6
–150
4
-150
0,5
3
0,4
-200
-200
0,3
2
-250
0,2
–250
1
0,1
-300
-300
-150 -100 -50
0
50
100 150 200
-150 -100 -50
0
50
100 150 200
x, мм
x, мм
Рис. 9. Картина внутренней структуры объекта при разном количестве элементов на передней N1 и боковой стенке N2:
а — N1 = 4, N2 = 0 (боковой решетки нет); б — N1 = 4, N2 = 1; в — N1 = 7, N2 = 0 (боковой решетки нет); г — N1 = 7, N2 = 5.
0
4
-50
3,5
3
-100
2,5
-150
2
Место
-200
1,5
дефекта
1
-250
0,5
-300
-150 -100 -50
0
50
100 150 200
x, мм
Рис. 10. Картина внутренней структуры объекта N1 = 7, N2 = 5 при использовании классического алгоритма SAFT-C.
Вдобавок, когда требуется высокое быстродействие при минимальных аппаратно-вычисли-
тельных ресурсах, можно использовать только один элемент боковой антенной решетки АР2.
ВЫВОДЫ
Специфика рассмотренного метода УЗ дефектоскопии состоит в том, что кроме антенной ре-
шетки, контактирующей с одной из поверхностей объекта, используются дополнительные при-
емные преобразователи на боковой поверхности объекта. В сочетании со сверхширокополосным
зондирующим сигналом и своеобразным алгоритмом обработки это позволяет в несколько раз
увеличить фронтальную разрешающую способность, а при использовании достаточно большой
антенной решетки на боковой поверхности объекта — получить трехмерное изображение внутрен-
ней структуры объекта. Наиболее перспективная область применения метода — неразрушающий
контроль строительных конструкций из бетона и других строительных материалов.
Дефектоскопия
№ 11
2021
Модернизация эхометода ультразвуковой дефектоскопии
33
Исследование выполнено при финансовой поддержке Российского Фонда Фундаментальных
Исследований (РФФИ) в рамках научного проекта № 19-38-90223.
СПИСОК ЛИТЕРАТУРЫ
1. Зацепин А.Ф. Акустический контроль: учебное пособие / А. Ф. Зацепин; под. общ. ред. В.Е. Щер-
бинина. Екатеринбург: Издательство Уральского университета, 2016. 211 с.
2. Ковалев А.В., Козлов В.Н., Самокрутов А.А., Шевалдыкин В.Г, Яковлев Н.Н. Импульсный эхоме-
тод при контроле бетона. Помехи и пространственная селекция // Дефектоскопия. 1990. № 2. С. 29—41.
3. Харкевич А.А. Спектры и анализ / Изд. 5-е. М.: Книжный дом «ЛИБРОКОМ», 2009. 240 с.
4. Schickert M., Krause M., Müller W. Ultrasonic Imaging of Concrete Elements Using Reconstruction by
Synthetic Aperture Focusing Technique // Journal of Materials in Civil Engineering. 2003. V. 15. P. 235—246.
5. Базулин Е.Г. Восстановление изображения отражателей методом С-SAFT с учетом анизотропии
материала объекта контроля // Дефектоскопия. 2015. № 4. С. 42—52.
6. Козлов В.Н., Самокрутов А.А., Шевалдыкин В.Г., Ультразвуковой низкочастотный преобразова-
тель // Патент РФ № 2082163. Бюлл. изобр. № 17. 1997.
7. Данилов В.Н., Самокрутов А.А., Люткевич А.М. Теоретические и экспериментальные исследова-
ния малоапертурных прямоугольных преобразователей // Контроль. Диагностика. 2003. № 7. С. 29—33.
8. Kartashev V.G., Trunov E.I., Shalimova E.V. Effective ultrasonic flaw detection method / Proceedings of
the 2nd 2020 International Youth Conference on Radio Electronics, Electrical and Power Engineering, REEPE
2020. 2020. С. 9059192.
Дефектоскопия
№ 11
2021