Электромагнитные методы
УДК 620.179.14
НЕРАЗРУШАЮЩИЙ КОНТРОЛЬ СТАЛЬНЫХ ТРОСОВ С ИСПОЛЬЗОВАНИЕМ
ОПТИМИЗИРОВАННОГО МЕТОДА ОПОРНЫХ ВЕКТОРОВ
© 2021 г. Бин Ли1,*, Цзювэй Чжан1,**, Цихан Чен1
1Хэнаньский научно-технологический университет, Лоян 471023, Китай
E-mail:*hnkjdxlb@163.com; **juweizhang@haust.edu.cn
Поступила в редакцию 05.09.2021; после доработки 24.09.2021
Принята к публикации 24.09.2021
Для решения проблем, связанных с недостаточным шумоподавлением сигнала и низкой скоростью распознавания
при контроле тросов методом магнитного поля рассеяния (МПР), предлагается MSVDW-алгоритм, который использует
комбинацию медианной фильтрации, сингулярного разложения (СР) и вейвлет-преобразования для шумоподавления
измеренных трехмерных МПР-сигналов. Затем псевдоцвет применяется для улучшения изображения. После изображе-
ние сегментируется с использованием метода максимума модуля. Моменты цвета извлекаются из изображений и исполь-
зуются в качестве входных данных для метода опорных векторов, оптимизированного алгоритмом роя частиц (ОРЧ-
МОВ), для обучения и распознавания. Результаты экспериментов показывают, что алгоритм уменьшения шума, пред-
ложенный в этой статье, эффективно снижает шум сигнала рассеяния, изображение в ложных цветах повышает количе-
ство информации об изображении дефекта, а алгоритм ОРЧ-МОВ значительно улучшает быстроту распознавания
дефектов.
Ключевые слова: стальной трос, сингулярное разложение, вейвлет-преобразование, усиление псевдоцвета, метод
роя частиц, метод опорных векторов.
DOI: 10.31857/S0130308221110063
1. ВВЕДЕНИЕ
Тросы являются распространенными и важными несущими деталями различных конструкций,
тесно связанных с нашей повседневной жизнью. Он широко используется в транспорте, горнодо-
бывающей промышленности, туризме, транспорте, металлургии и строительстве, говоря конкрет-
нее, в шахтных подъемниках, лифтах, канатных дорогах, крупном подъемном оборудовании и др.
[1]. Однако длительная эксплуатация стальных тросов неизбежно приводит к износу и усталости
металла троса, образованию ржавчины, к деформациям формы, обрывам самого троса и так далее.
Такие дефекты приводят к снижению предельной нагрузки, которую может выдерживать трос, что
может привести к опасным авариям, и, как следствие, к огромным экономическим потерям и чело-
веческим жертвам. Поэтому регулярный контроль сохранности тросов очень важен.
С момента изобретения стальных тросов люди активно искали способы обеспечить их безопас-
ную эксплуатацию. На сегодняшний день для контроля тросов разработано множество методов. В
настоящее время основными методы неразрушающего контроля являются метод ультразвукового
контроля [2], радиоволновой метод, инфракрасный метод контроля [3], метод акустической эмис-
сии, метод электромагнитного контроля [4] и так далее. Среди них наиболее широко используется
метод электромагнитного контроля, поскольку он имеет преимущества в низкой стоимости, высо-
кой точности, простоте принципа и подходит для тросов со сложной структурой. В настоящее
время электромагнитный контроль в основном включает магнитопорошковый контроль, контроль
ультракороткими волнами, контроль вихревыми токами [5], метод рассеяния потока и метод маг-
нитной памяти [6]. Метод МПР основывается на возникающем рассеянии магнитного поля при
намагничивании троса. Поскольку внутренние и поверхностные дефекты формируют искажения
магнитного поля на поверхности троса, дефекты количественно идентифицируются путем измере-
ния МПР [7]. Методы электромагнитного контроля можно разделить по способу наведения маг-
нитного поля в объекте контроля на два типа: намагничивание посредством катушки [8, 9] и намаг-
ничивание посредством постоянного магнита [10]. В устройствах, использующих в качестве
намагничивающего устройства П-образный электромагнит с двумя намотанными катушками,
магнитные поля с разной напряженностью генерируются изменением значения электрического
тока в катушках. Устройства, использующее в качестве намагничивающего устройства постоянные
магниты, обычно выполнены в виде подковы, т.е. проектируются U-образные намагничивающие
устройства. Симметричная конструкция используется для обеспечения равномерного намагничи-
вания и магнитного насыщения троса. При повреждении троса возникает поле утечки [11, 12].
После намагничивания магнитное поле рассеяния троса обнаруживают и идентифицируют.
50
Бин Ли, Цзювэй Чжан, Цихан Чен
Пространственный МПР-сигнал имеет три компоненты: радиальную, угловую и осевую.
Каждая компонента содержит большое количество информации о дефектах. Среди них интен-
сивность сигнала осевой компоненты в направлении намагничивания стального каната и ради-
альная компонента сигнала вдоль радиального направления стального троса выше, а эффектив-
ность обнаружения дефектов лучше. Следовательно, при МПР-контроле чаще выбирали эти два
параметра, а не осевую компоненту. Например, гигантская матрица магниторезистивных датчи-
ков, разработанная [13], предназначена для сбора сигнала радиальной компоненты рассеяния.
Он использует алгоритм вейвлет-фильтрации с учетом сжатия для уменьшения шума и достиже-
ния лучших результатов. Чтобы еще больше улучшить эффект снижения шума, был разработан
алгоритм фильтрации, сочетающий преобразование Гильберта—Хуанга и фильтрацию с учетом
сжатия для подавления системного шума [14]. Но недостатком обоих алгоритмов является дли-
тельное время вычислений. В [15] устройство контроля было разработано на основе характери-
стик распределения магнитного поля рассеяния дефекта эквивалентной модели магнитного
диполя и влияния различных параметров дефекта на распределение магнитного поля рассеяния
с использованием 30 датчиков Холла, равномерно распределенных вокруг окружности троса для
сбора информации о наличии магнитного поля рассеяния. Однако отношение сигнал/шум
(ОСШ) сигнала, собираемого устройством, низкое из-за эффекта низкой чувствительности дат-
чиков Холла. Четырехканальная матрица датчиков Холла для контроля локальных дефектов
была разработана в [16] и впоследствии усовершенствована до восьмиканальной матрицы дат-
чиков Холла для сбора двумерной (2D) информации о рассеянии [17]. Чтобы продемонстриро-
вать, что методика измерения сигнала 3D-МПР на поверхности троса является более предпо-
чтительной по сравнению с измерением одномерного сигнала рассеяния, в [18] была разработа-
на трехмерная система контроля рассеяния, основанная на намагничивании не до насыщения, с
использованием туннельных магниторезистивных элементов, и они отображали трехмерный
сигнал рассеяния с уменьшенным шумом в RGB-пространство для цветного изображения. Это
увеличивает информацию об изображении дефекта и эффективно улучшает скорость распозна-
вания обрыва проводов. Чтобы улучшить качество информацию об изображении дефекта, в [19]
карта оттенков серого, полученного 2D-МПР-сигнала, была преобразована в псевдоцветное изо-
бражение, что значительно повысило скорость распознавания обрыва провода. Однако улучше-
ние изображения дефекта неочевидно и требует усовершенствования.
В существующей методике неразрушающего контроля тросов есть трудности, такие как
невозможность контроля вдоль окружности, слабый эффект шумоподавления МПР-сигнала и
низкая точность идентификации дефектов. В измеренном исходном сигнале есть несколько
источников шума, поэтому в этой статье предлагается алгоритм уменьшения шума, сочетающий
медианную фильтрацию, сингулярное разложение (СР) и вейвлет-преобразование. Алгоритм
эффективно подавляет шум в МПР-сигнале, и ОСШ радиальной составляющей МПР-сигнала
увеличивается на 13,9868 дБ, ОСШ тангенциальной составляющей увеличивается на 12,4524 дБ,
а ОСШ осевой составляющей увеличивается на 28,8389 дБ по сравнению с алгоритмом, сочета-
ющим медианный фильтр и вейвлет-преобразование. Чтобы улучшить качество информацию об
изображении дефекта, цветное изображение преобразуется в изображение в псевдоцветах, а
определение местоположения дефекта и сегментация выполняются с использованием метода
максимума модуля. Затем характеристики момента цвета из изображений в ложных цветах
извлекаются и используются в качестве входных данных для МОВ и ОРЧ-МОВ для обучения и
распознавания. Когда допустимая ошибка составляет 0,4505 %, а максимальная ошибка распоз-
навания не превышает 0,9009 %, скорость распознавания ОРЧ-МОВ улучшается на 11,11 % по
сравнению с МОВ. Когда допустимая ошибка составляет 0,9009 %, а максимальная ошибка рас-
познавания не превышает 1,351 %, скорость распознавания ОРЧ-МОВ улучшается на 1,85 % по
сравнению с МОВ. Результаты экспериментов показывают, что предложенный алгоритм шумо-
подавления эффективно подавляет шум в исходном сигнале. Изображения в псевдоцветах
эффективно улучшают информацию о дефектах. Конечно, ОРЧ-МОВ также эффективно улучша-
ет скорость распознавания дефектов.
2. РЕГИСТРАЦИЯ ДАННЫХ
В данной статье предлагается устройство сбора данных из работы [18]. Как показано
на рис. 1, устройство включает в себя матрицу из датчиков магнитного поля, состоящую из 30
равномерно распределенных туннельных магниторезистивных (ТМР) датчиков, устройство
кодирования и намагничивающего устройства, состоящего из 12 равномерно распределенных
Дефектоскопия
№ 11
2021
Неразрушающий контроль стальных тросов с использованием оптимизированного метода...
51
Радиальная
Тангенциальная
Осевая
Компонента совпадает
с направлением стрелки
Направление
движения устройства
Устройство
Стальной трос
кодирования
Матрица из
постоянных магнитов
Матрица датчиков
Рис. 1. Схема измерительного устройства.
а
б
Рис. 2. Передняя (а) и задняя (б) часть матрицы датчиков магнитного поля.
постоянных магнитов из сплава неодима, железа, бора. Матрица датчиков магнитного поля
показана на рис. 2. Она состоит из 10 частей, равномерно распределенных по окружности при-
бора. Каждый компонент содержит три ТМР-датчика, направления контроля которых перпен-
дикулярны друг другу, для сбора радиальных, тангенциальных и осевых МПР-сигналов от
троса. Процесс регистрации данных следующий: во-первых, трос намагничивается намагни-
чивающим устройством, во-вторых, матрица датчиков регистрирует МПР-сигналы на поверх-
ности троса. Когда прибор движется вдоль оси троса с постоянной скоростью, устройство
кодирования синхронно посылает селекторные импульсы с равными интервалами. Затем, в
соответствии с импульсным сигналом, под управлением контроллера трехмерный магнитный
датчик поочередно улавливает трехмерный МПР-сигнал в окружном направлении троса. В
этой статье рассматриваются шесть дефектов: обрыв 1-го провода, обрыв 2-х проводов, обрыв
3-х проводов, обрыв 4-х проводов, обрыв 5-и проводов и обрыв 7-и проводов. На рис. 3 пока-
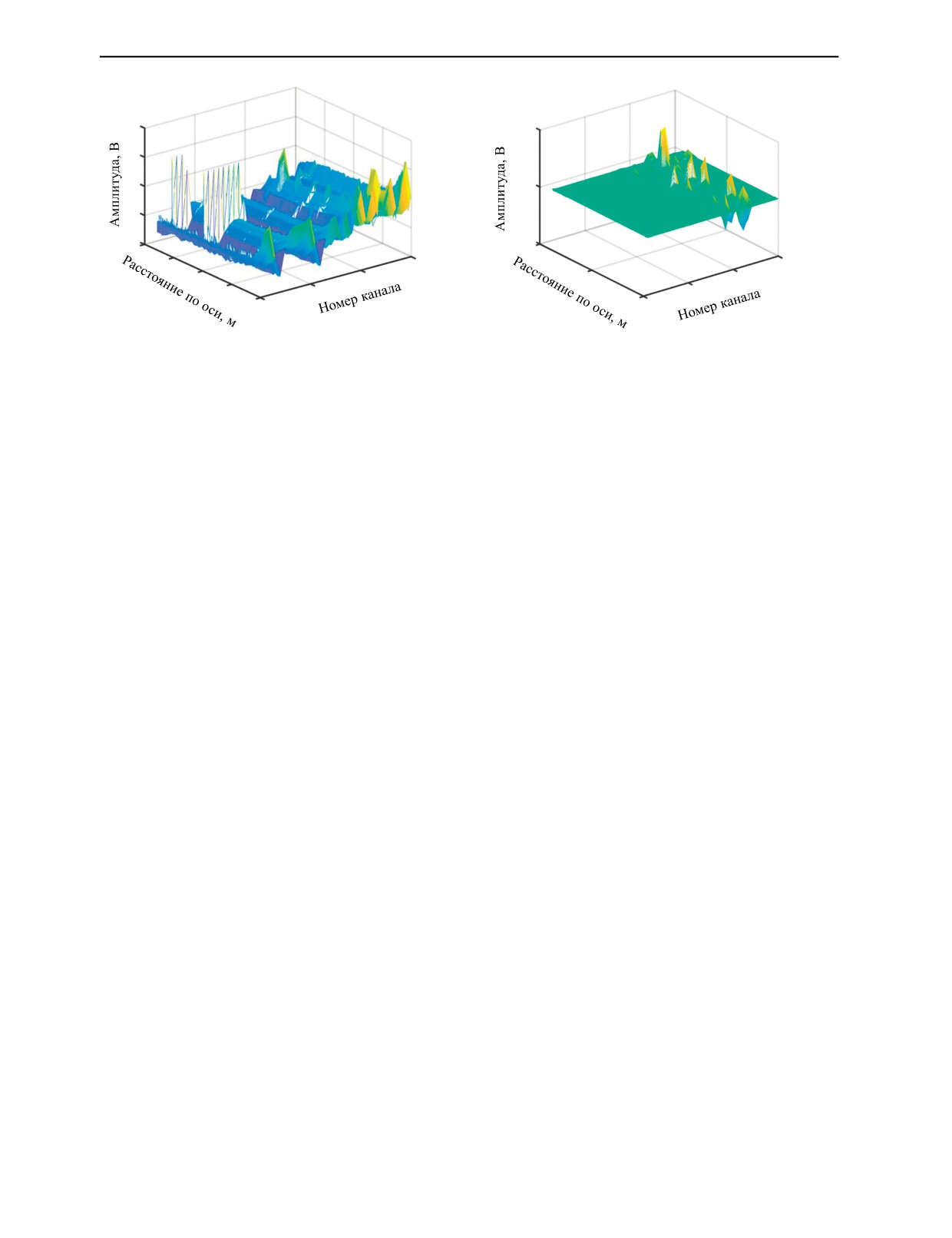
зан исходный сигнал после сопоставления точек выборки. Среди них канал (3n) — это сигнал
осевой составляющей, (3n - 1) канал — это сигнал тангенциальной составляющей, (3n - 2)
канал — сигнал радиальной составляющей, а n варьируется в пределах от 1 до 10.
Дефектоскопия
№ 11
2021
52
Бин Ли, Цзювэй Чжан, Цихан Чен
а
б
4
0,5
3
2
0
1
0
-0,5
4
4
3
30
2
20
2
20
1
10
10
0
0
0 0
Рис. 3. Трехмерная диаграмма распределения МПР-сигнала: исходный сигнал(a); отфильтрованный сигнал (б).
2.1. Обработка данных
Исходные данные, полученные измерительным устройством, содержат много шума. Например:
волновой шум, создаваемый прядями троса, флуктуация и высокочастотный МПР-шум, вызван-
ные неравномерным намагничиванием, и шум, создаваемый дрожанием троса во время процесса
измерения. Чтобы устранить влияние этих шумов на сигнал, в этой статье используется MSVDW-
алгоритм для уменьшения шума исходного сигнала.
Медианная фильтрация — это метод нелинейной обработки сигналов, основанный на стати-
стической теории упорядочения, который может эффективно подавлять шум. Он имеет хорошие
характеристики сохранения краёв и способность подавлять импульсный шум, но его способность
подавлять случайный шум не очень хороша [20].
2.2. Вейвлет-анализ
Вейвлет-преобразование — это метод анализа. Он унаследовал и развил идеи о локализации
быстрого фурье-преобразования, но также преодолел недостаток, заключающийся в том, что раз-
мер окна не изменяется с частотой, и метод может анализировать нестационарные сигналы. В
практических применениях большая часть сигналов нестационарна (нестационарные случайные
процессы), поэтому это идеальный инструмент для частотно-временного анализа и обработки
сигнала. Особенности вейвлет-преобразования следующие.
1. Для малых значений частоты разрешение в частотной области высокое, а разрешение во
временной области низкое.
2. Для больших значений частоты разрешение в частотной области низкое, а разрешение во
временной области высокое.
2.3. Сингулярное разложение
Принцип СР-шумоподавления заключается в использовании разделимости по энергии сигнала
и шума для разложения матрицы, состоящей из сигнала, содержащего шум, и сохранения только
сингулярных значений характеристик сигнала, чтобы достичь цели удаления шума и сохранения
сигнала. Более того, это может уменьшить объем вычислений и устранить шум, поскольку неболь-
шие сингулярные значения обычно являются шумом.
Предположим, что несущий шум сигнал:
x=
{
x
, x
, ...,
x
}
,
тогда он может быть выражен как
1
2
N
x
=s
+w
;
i=1, 2, ...,N,
(1)
i
i
i
где si — реальный сигнал; wi — зашумленный сигнал; N — длина ряда данных. Матрица Ганкеля
порядка m × n строится на основе ранее полученных данных измерения.
Дефектоскопия
№ 11
2021
Неразрушающий контроль стальных тросов с использованием оптимизированного метода...
53
x
x
x
1
2
n
x
x
x
2
3
n+1
H
=
=
S+W,
(2)
x
x
x
m
m+1
N
где N = m + n - 1; S — траекторная матрица, соответствующая реальному сигналу в восстановлен-
ном фазовом пространстве; W — траекторная матрица, соответствующая шуму.
Сингулярное разложение матрицы H:
H
H =U ∑ V
,
(3)
m×n
n×n
где
U∈R
;
V∈R
— ортогональные матрицы;
= diag(σ
,σ
, ...,
σ
);
σ
(i=1, 2, ...,r)—
∑
1
2
r
i
сингулярное значение матрицы H;
σ
1
≥σ
2
≥
≥σ
r
≥
0;
r — ранг матрицы H. Затем средняя вели-
чина собственных значений используется как пороговое значение для определения порядка
восстановления k, и сигнал восстанавливается с уменьшением шума.
2.4. Описание алгоритма
Основанный на вейвлет-преобразовании процесс сингулярного разложения изложен ниже.
x
x
x
1
2
n
x
x
x
2
3
n+1
1) Построить матрицу Ганкеля порядка m×n:H
=
x
x
x
m
m+1
N
H
2) Провести СР для шумной матрицы H, т.е.
H =U ∑ V
3) Оценка эффективного ранга r.
r
T
4) Рассчитывается аппроксимация
X
r
i i i
= ∑ σ
uv
ранга r сигнала, где ur и vi — левый и правый
i=1
сингулярные векторы высокочастотного сигнала соответственно.
5) Средняя величина собственных значений используется в качестве порогового значения для
определения порядка восстановления k, и сигнал восстанавливается.
6) Вейвлет-разложение восстановленного сигнала проводится по алгоритму Малла.
Устанавливаем параметры, связанные с вейвлет-разложением: используем вейвлет Добеши-V
(db5) , чтобы разложить сигнал ортогонально для каждого канала с числом слоёв разложения, рав-
ным K = 8.
7) Очистить низкочастотный сигнал и выполнить пороговую обработку высокочастотных
коэффициентов.
8) Вейвлет-коэффициенты восстанавливаются, используя функцию вейвлет-разложения для
получения отфильтрованного сигнала.
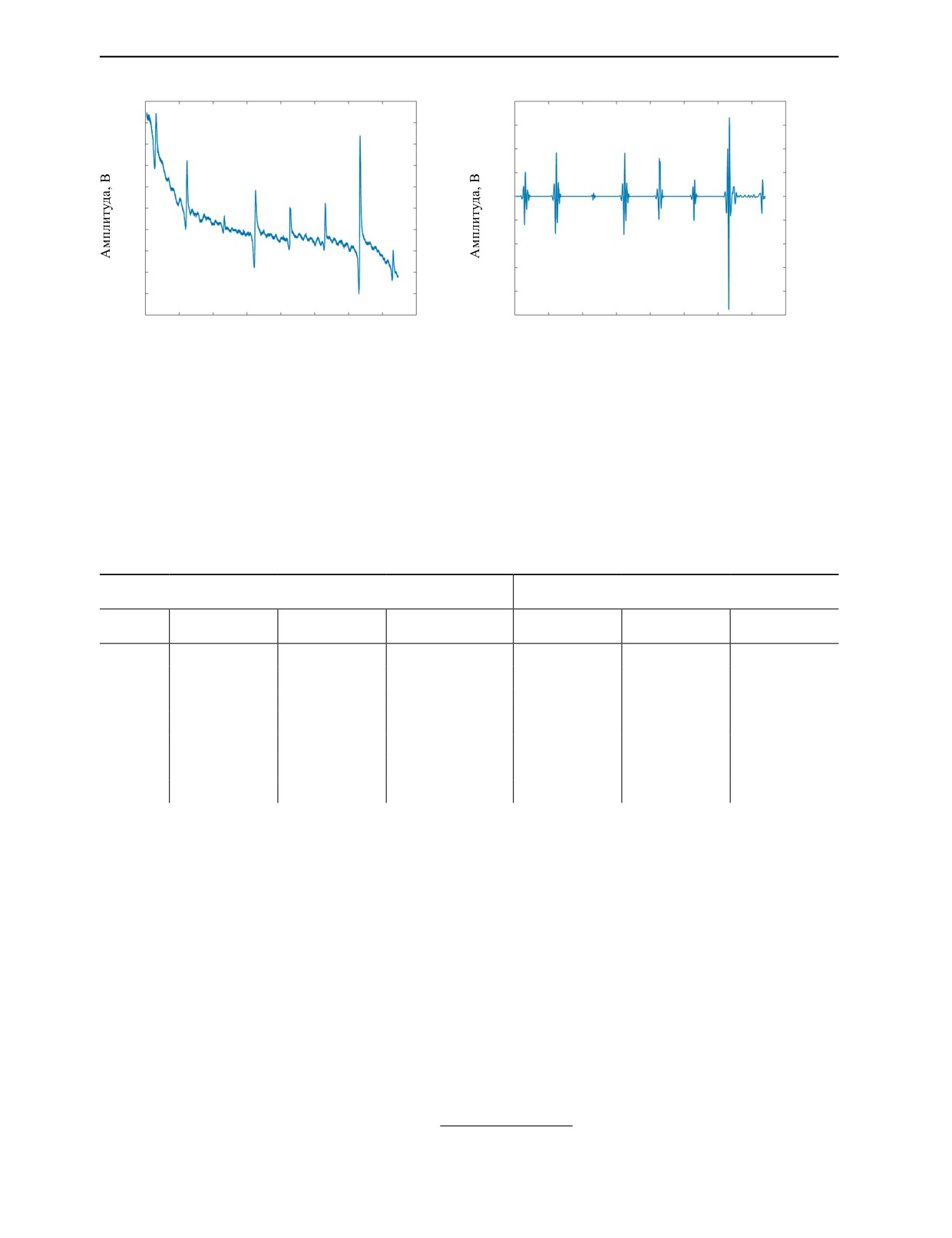
Исходные данные радиальной компоненты МПР до фильтрации показаны на рис.4а, а на рис.
4б показаны данные радиальной компоненты после фильтрации вышеуказанным алгоритмом.
Рис. 3а показывает трехмерный МПР-сигнал после фильтрации для 30 каналов.
Авторы используют ОСШ, чтобы количественно описать эффект снижения шума, и ОСШ
определяется как
N
(i)
∑d2
i
=1
SNR
=
10log
,
(4)
N
d i)−d
(i)
∑
(
)2
i=1
где N — количество точек измерения; d(i) — МПР-сигнал после шумоподавления;
d(i) — эффек-
тивная часть МПР-сигнала после шумоподавления, чем больше ОСШ, тем лучше эффект уменьше-
ния шума.
6 репрезентативных сигналов выбираются из набора МПР-сигналов и ОСШ алгоритма, комби-
нирующего медианную фильтрацию и вейвлет-преобразование, сравнивается с ОСШ алгоритма,
Дефектоскопия
№ 11
2021
54
Бин Ли, Цзювэй Чжан, Цихан Чен
а
б
2,6
0,4
2,4
0,3
2,2
0,2
2
0,1
1,8
0
1,6
-0,1
1,4
-0,2
1,2
-0,3
1
-0,4
0,8
0,6
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
4
0
0,5
1
1,5
2
2,5
3
3,5
4
Радиальная компонента
Радиальная компонента
Рис. 4. Радиальная компонента МПР-сигнала: исходный сигнал (a); отфильтрованный сигнал (б).
предложенном в этой статье. Табл. 1 показывает результаты расчета ОСШ для обоих алгоритмов.
Как видно из табл. 1, ОСН радиальной компоненты МПР-сигнала улучшается до 15,5357 дБ; ОСШ
тангенциальной компоненты МПР-сигнала улучшается до 12,9278 дБ; ОСШ осевой компоненты
МПР-сигнала улучшается до значения 33,6053 дБ.
Таблица
1
Сравнение ОСШ алгоритма, комбинирующего медианную фильтрацию и вейвлет-преобразование, и ОСШ
алгоритма, предложенного в этой статье
Пороговое шумоподавление посредством медианной фильтрации,
Предлагаемый алгоритм
скомбинированной с вейвлет-преобразованием
Радиальная
Тангенциальная
Осевая компонента,
Радиальная
Тангенциальная
Осевая
компонента, дБ
компонента, дБ
дБ
компонента, дБ
компонента, дБ
компонента, дБ
1
27,2185
22,7632
18,9024
59,6139
39,0637
56,9338
2
30,2777
31,1119
21,2238
49,6660
53,9299
61,7310
3
34,8958
33,0042
32,5571
36,1945
36,2176
59,0912
4
31,2058
32,3874
24,5519
36,2155
42,9426
61,8133
5
31,2311
32,9534
23,2599
44,5029
46,6349
49,8587
6
31,7198
29,8472
28,4744
53,5702
41,4112
61,1736
Среднее
31,0915
30,4389
24,8283
46,6272
43,3667
58,4336
3. ОБРАБОТКА ИЗОБРАЖЕНИЙ
В результате обработки изображений сложные исходные данные могут представать в виде
интуитивно понятных, кратких и простых для понимания изображений. В этом разделе авторы
подготавливаются к последующей количественной идентификации канатов с помощью нормали-
зации серой шкалы, трехкратной сплайн-интерполяции, преобразования изображения в псевдоц-
ветах, а также локализации и сегментации дефектов.
3.1. Нормализация и интерполяция
Нормализация в оттенках серого — это процесс преобразования МПР-данных в визуальные
данные, который является основой для создания цветных изображений трехмерных МПР-
сигналов. МПР-данные нормализуются с использованием метода min-max нормализации, как
показано в уравнении:
data i,j)-data
min
data i,j)
=
255−
×255,
(5)
data
max
−data
min
Дефектоскопия
№ 11
2021
Неразрушающий контроль стальных тросов с использованием оптимизированного метода...
55
где datamin — минимальное значение в группе схожих данных; datamax — максимальное значение в
группе схожих данных.
Система сбора данных в этой статье использует 10-канальную матрицу датчиков, поэтому
окружное разрешение МПР-изображения составляет всего 10, что намного ниже, чем осевое раз-
решение. Чтобы сделать МПР-изображение более интуитивно понятным и избежать низкого раз-
решения отображения дефектов, необходима круговая интерполяция. Мы используем интерполя-
цию кубическим сплайном, чтобы улучшить разрешение по окружности с 10 до 192.
3.2. Преобразование псевдоцветов
Усиление псевдоцветов — это преобразование естественного цветного изображения или муль-
тиспектрального изображения одного и того же участка в новый трехцветную компоненту с помо-
щью функции сопоставления, а синтез цветов заставляет интересующую цель проявляться в дру-
гом цвете, по сравнению с исходным изображением. Для увеличения способности распознавания
изображений в этой статье используются следующие линейные соотношения сопоставления псев-
доцветов:
R
0
1
0
R
F
f
G
=
0
0
1
⋅G
(6)
F
f
B
1
0
0
B
F
f
В этой статье аксиальные компоненты x, y и z нормализованного МПР-сигнала отображаются
в каналы красного, зеленого и синего цветов для получения цветного МПР-изображения, как пока-
зано на рис. 5a. Весовой коэффициент зеленого канала устанавливается на 0,8, а красного и сине-
го каналов — на 1. Затем цветное изображение преобразуется в изображение в псевдоцвете, как
показано на рис. 5б, в соответствии с указанным выше соотношением.
а
б
Рис. 5. Усиление псевдоцветов:
цветное изображение (a); изображение в псевдоцветах (б).
3.3. Локализация и сегментация дефектов
В данной статье используется метод максимума модуля для локализации и сегментации дефек-
тов, и он состоит из следующих шагов.
1. Выбрать первый цветовой канал цветного МПР-изображения и провести суммирование по
окружности на МПР-данных для получения последовательности d(j), где j = 1, 2, 3, …, N,
N — количество точек измерения по оси.
2. Установить пороговое значение для последовательности d(j), сохранить наибольшее значе-
ние в этой последовательности и принять точку ниже порогового значения за 0. И записать поряд-
ковый номер локального максимума в последовательности.
3. В соответствии с шириной дефекта осевая длина изображения дефекта составляет около 192
пикселей, поэтому изображение дефекта в ложном цвете 192×192×3 сегментируется в соответ-
ствии с порядковым номером максимума.
Изображения в псевдоцветах дефектов шести поврежденных тросов, которые сегментирова-
лись согласно вышеописанному алгоритму, показаны на рис. 6.
Дефектоскопия
№ 11
2021
56
Бин Ли, Цзювэй Чжан, Цихан Чен
а
б
в
г
д
е
Рис. 6. Фотографии (верхняя строка) и изображения в псевдоцветах (нижняя строка) дефектов шести различны повреж-
денных тросов: 1 поврежденная проволока (a); 2 поврежденные проволоки (б); 3 поврежденные проволоки (в);
4 поврежденные проволоки (г); 5 поврежденных проволок (д); 7 поврежденных проволок (е).
4. КОЛИЧЕСТВЕННАЯ ИДЕНТИФИКАЦИЯ
Количественная идентификация дефектов обрыва каната является важной целью неразрушаю-
щего контроля тросов. Чтобы провести контроль троса как можно точнее, искусственно создаются
дефекты обрыва проволоки (1, 2, 3, 4, 5, 7 оборванных проволок) и небольшие зазоры (около 2 мм)
для стального троса 6×37S +FC с номинальным диаметром 30 мм. В этом разделе цветовые пара-
метры извлекаются из изображений в псевдоцветах, а затем сравниваются результаты обучения
МОВ и ОРЧ-МОВ.
4.1. Выделение данных
Момент цвета — очень простой и эффективный параметр, предложенный Stricker и Orengo
[21]. Его математическая основа состоит в том, что любой цвет в изображении может быть пред-
ставлен его моментом. Преимущество использования цветовых моментов для представления
информации об изображении состоит в том, что нет необходимости квантовать цветовое простран-
ство, а вектор признаков имеет низкую размерность. Более того, поскольку информация о цвете в
основном сосредоточена в моментах низшего порядка, для представления цветового распределе-
ния используются момент первого порядка (среднее значение), момент второго порядка (диспер-
сия) и момент третьего порядка (асимметрия). Следовательно, для цветового момента изображе-
ния требуется 9 компонент (3 цветов ых канала, каждый с 3 моментами низшего порядка).
Математические выражения трех цветовых моментов следующие:
N
1
µ
=
p
;
(7)
i
∑
i,
j
N
j
=1
1
N
2
1
2
(8)
σ
=
(
p
−µ
)
;
i
∑
i
,
j
i
N
j=1
1
N
3
1
3
(9)
s
=
(
p
−µ
)
,
i
∑
i,
j
i
,
j
N
j=1
где N — количество пикселей; pi, j — i-я цветовая компонента j-го пикселя.
Следовательно, 3 цветовых момента каналов RGB в области дефекта на изображении образуют
9-мерный вектор признаков, который выражается как
Дефектоскопия
№ 11
2021
Неразрушающий контроль стальных тросов с использованием оптимизированного метода...
57
F
color
=
[
µ
,σ
,s
,µ
,σ
R R R G G G B B B
,s
,µ
,σ
,s
].
(10)
4.2. Метод опорных векторов
МОВ — это метод машинного обучения, основанный на принципе минимизации структур-
ных рисков, а классификатор МОВ может решать задачи классификации с небольшими обучаю-
щими выборками, высокой размерностью и нелинейностью. Мы используем извлеченные харак-
теристики момента цвета в качестве образцов характеристик ОРЧ-МОВ и нормализуем значения
характеристик момента цвета каждого стандартного образца изображения до [-1, 1] в качестве
набора входных образцов. Затем 254 объекта выборки случайным образом делятся на две груп-
пы. Среди них 200 групп выборочных данных используются в качестве обучающих наборов, а
остальные 54 группы используются в качестве тестовых наборов. МОВ имеет два важных пара-
метра: один — это коэффициент регуляризации (c), а другой — параметр ядра (g, функция ядра
Гаусса). Для оптимизации этих двух параметров на базе libsvm-инструментария в данной статье
используется алгоритм оптимизации роя частиц. Поскольку эта статья представляет собой зада-
чу множественной классификации, используется целевая функция максимизации точности.
Параметрами оптимизации являются только c и g, поэтому количество параметров оптимизации
установлено равным 2. Затем устанавливаются параметры 5-кратной перекрестной проверки.
Параметры ОРЧ задаются, количество роев частиц устанавливается равным 6, а максимальное
количество итераций установлено на 40. Наконец, модель МОВ переобучается с использованием
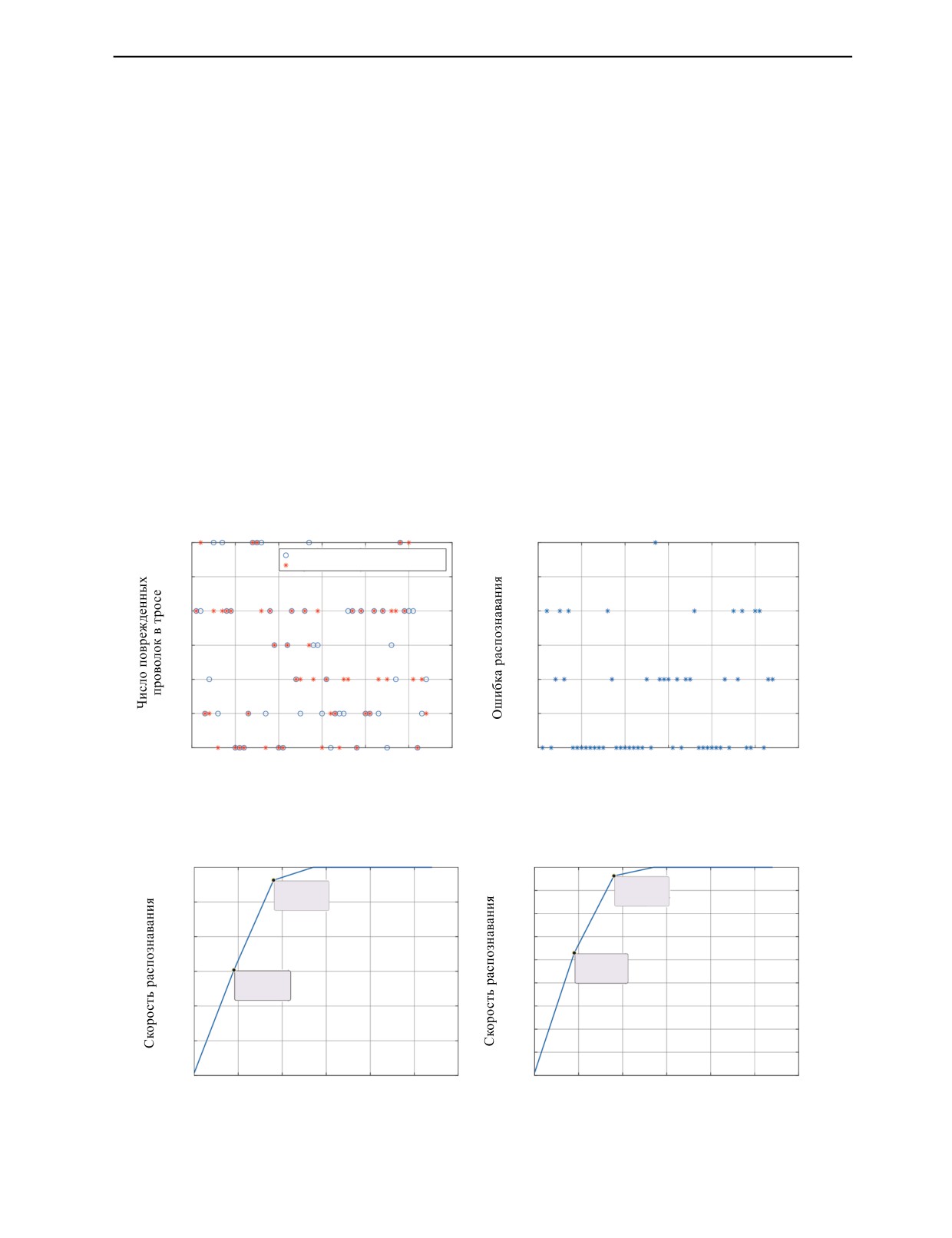
оптимальных значений параметров. После нескольких рандомизированных испытаний фактиче-
ская классификация и прогнозируемая классификация тестовой выборки показаны на рис. 7a, а
ошибка распознавания в тестовом наборе показана на рис. 7б. Скорость распознавания МОВ
а
б
7
3
Фактическая классификация
Прогнозируемая классификация
6
2,5
5
2
4
1,5
3
1
2
0,5
0
1 0
10
20
30
40
50
60
0
10
20
30
40
50
60
Номер измерения
Номер измерения
Рис. 7. Результаты обучения на тестовом наборе данных: фактическая и прогнозируемая классификация (a); ошибка
распознавания (б).
а
б
1
1
X 0,009009
X 0,009009
0,95
Y 0,9815
0,9
Y 0,963
0,9
0,8
0,85
0,8
X 0,004505
0,7
Y 0,8148
X 0,004505
0,75
Y 0,7037
0,6
0,7
0,65
0,5
0,6
0,4
0,55
0
0,005
0,01
0,015
0,02
0,025
0,03
0
0,005
0,01
0,015
0,02
0,025
0,03
Относительная погрешность
Ошибка распознавания
Рис.
8. Скорость распознавания на тестовом наборе: скорость распознавания МОВ (a); скорость распознавания
ОРЧ—МОВ (б).
Дефектоскопия
№ 11
2021
58
Бин Ли, Цзювэй Чжан, Цихан Чен
показана на рис. 8a, а скорость распознавания ОРЧ-МОВ показана на рис. 8б.
Как видно из рис. 7, ошибка в распознавании обрыва провода имеет место для 1 провода и 2
провода, а распознавание дефектов других проводов происходит лучше. Как видно из рис. 8, точ-
ность распознавания МОВ составляет 70,37 %, когда допустимая ошибка составляет 0,4505 %, а
максимальная ошибка распознавания не превышает 0,9009 %. При тех же условиях точность рас-
познавания ОРЧ-МОВ составляет 81,48 %. В этих условиях точность распознавания ОРЧ-МОВ
улучшается на 11,11 % по сравнению с МОВ. Когда допустимая ошибка составляет 0,9009 %, а
максимальная ошибка распознавания не превышает 1,351 %, точность распознавания МОВ состав-
ляет 96,3 %. При тех же условиях точность распознавания ОРЧ-МОВ составляет 98,15 %. В этих
условиях точность распознавания ОРЧ-МОВ улучшается на 1,85 % по сравнению с МОВ.
Результаты экспериментов показывают, что ОРЧ-МОВ обеспечивает лучшие результаты при рас-
познавании обрыва каната.
5. ЗАКЛЮЧЕНИЕ
В этой статье реализованы локализация и количественная идентификация дефектов каната, а
также предложен алгоритм шумоподавления, сочетающий медианную фильтрацию, разложение
по сингулярным значениям и вейвлет-преобразование. Более того, алгоритм может эффективно
снижать шум в исходном сигнале и значительно улучшить ОСШ сигнала. Во-вторых, были нор-
мализованы МПР-данные после шумоподавления для получения изображения сигнала в оттен-
ках серого, а окружное разрешение изображения в оттенках серого было улучшено с помощью
интерполяции кубическим сплайном. В-третьих, псевдоцвет используется для повышения
информативности изображения дефекта. Затем метод максимума модуля используется для сег-
ментации изображения в псевдоцветах. Наконец, извлекаются моменты цвета дефекта. Девять
извлеченных векторов признаков дефектов используются в качестве входных данных ОРЧ-МОВ
для количественной идентификации обрыва провода, и, в итоге, получаются хорошие результа-
ты по распознаванию дефектов. В будущих исследованиях мы сосредоточимся на улучшении
оборудования, оптимизации алгоритма шумоподавления и улучшении качества изображения.
Работа частично поддержана Национальным Фондом Естественных Наук Китая (№ Гранта
U2004163).
СПИСОК ЛИТЕРАТУРЫ
1. Min Z. Research on Key Technologies of Quantitative Detection of Magnetic Leakage in Local Defects //
2012. doi: 10.7666/d.D243446
2. Tse P.W., Rostami J. Advanced signal processing methods applied to guided waves for wire rope defect
detection. 2016.
3. Zhang D., Zhou Z., Sun J., Zhang E., Yang Y., Zhao M. A Magnetostrictive Guided-Wave Nondestructive
Testing Method With Multifrequency Excitation Pulse Signal // IEEE Transactions on Instrumentation and
Measurement. 2014. V. 63. No. 12. P. 3058—3066. doi: 10.1109/tim.2014.2324812
4. Yan X., Zhang D., Zhao F. Improve the signal to noise ratio and installation convenience of the inductive
coil for wire rope nondestructive testing // NDT & E International. 2017. V. 92. P. 221—227. doi: 10.1016/j.
ndteint.2017.09.005
5. Bernieri A., Betta G., Ferrigno L., Laracca M., Mastrostefano S. Multifrequency Excitation and Support
Vector Machine Regressor for ECT Defect Characterization // IEEE Transactions on Instrumentation and
Measurement. 2014. V. 63. No. 5. P. 1272—1280. doi: 10.1109/tim.2013.2292326
6. Chen H., Wang C., Zuo X. Research on methods of defect classification based on metal magnetic
memory // NDT & E International. 2017. V. 92. P. 82—87. doi: 10.1016/j.ndteint.2017.08.002
7. Li J.Y. et al. Literature Review of Research on the Technology of Wire Rope Nondestructive Inspection
in China and Abroad // MATEC Web of Conferences. 2015. V. 22. doi: 10.1051/matecconf/20152203025
8. Sharatchandra Singh W., Rao B.P.C.,Mukhopadhyay C.K., Jayakumar T. GMR-based magnetic flux
leakage technique for condition monitoring of steel track rope // Insight - Non-Destructive Testing and
Condition Monitoring. 2011. V. 53. No. 7. P. 377—381. doi: 10.1784/insi.2011.53.7.377
9. Jomdecha C., Prateepasen A. Design of modified electromagnetic main-flux for steel wire rope
inspection // NDT & E International. 2009. V. 42. No. 1. P. 77—83. doi: 10.1016/j.ndteint.2007.10.006
10. Fedorko G., Molnár V., Ferková Ž., Peterka P., Krešák J., Tomašková M. Possibilities of failure
analysis for steel cord conveyor belts using knowledge obtained from non-destructive testing of steel ropes //
Engineering Failure Analysis. 2016. V. 67. P. 33—45. doi: 10.1016/j.engfailanal.2016.05.026
11. Park S.H., Kim J.W., Nam M.J., Lee J.J. Magnetic Flux Leakage Sensing-Based Steel Cable NDE
Technique Incorporated on a Cable Climbing Robot for Bridge Structures // Advances in Science and
Дефектоскопия
№ 11
2021
Неразрушающий контроль стальных тросов с использованием оптимизированного метода...
59
12. Sun Y., Liu S., Li R., Ye Z. , Kang Y., Chen S. A new magnetic flux leakage sensor based on open
magnetizing method and its on-line automated structural health monitoring methodology // Structural Health
Monitoring. 2015. V. 14. No. 6. P. 583—603. doi: 10.1177/1475921715604387
13. Zhang J., Tan X., Zheng P. Non-Destructive Detection of Wire Rope Discontinuities from Residual
Magnetic Field Images Using the Hilbert-Huang Transform and Compressed Sensing // Sensors (Basel).
Mar. 16. 2017. V. 17. No. 3. doi: 10.3390/s17030608
14. Sun Y., Liu S., Ye Z., Chen S., Zhou Q. A Defect Evaluation Methodology Based on Multiple Magnetic
Flux Leakage (MFL) Testing Signal Eigenvalues // Research in Nondestructive Evaluation. 2015. V. 27.
No. 1. P. 1—25. doi: 10.1080/09349847.2015.1039100
15. Yinni C. Research on quantitative detection of local defects of steel wire rope based on magnetic flux
leakage imaging principle // 2008. doi: CNKI:CDMD:1.2008.194712.
16. Kim J.-W., Park S. Magnetic flux leakage-based local damage detection and quantification for steel
wire rope non-destructive evaluation // Journal of Intelligent Material Systems and Structures. 2017. V. 29.
No. 17. P. 3396—3410. doi: 10.1177/1045389x17721038
17. Kim J.W., Park S. Magnetic Flux Leakage Sensing and Artificial Neural Network Pattern Recognition-
Based Automated Damage Detection and Quantification for Wire Rope Non-Destructive Evaluation // Sensors
(Basel). Jan 2 2018. V. 18. No. 1. doi: 10.3390/s18010109
18. Zhang J., Peng F., Chen J. Quantitative Detection of Wire Rope Based on Three-Dimensional Magnetic
Flux Leakage Color Imaging Technology // IEEE Access. 2020. V. 8. P. 104165—104174. doi: 10.1109/
access.2020.2999584
19. Zheng P., Zhang J. Quantitative nondestructive testing of wire rope based on pseudo-color image
enhancement technology // Nondestructive Testing and Evaluation. 2019. V. 34. No. 3. P. 221—242.
doi: 10.1080/10589759.2019.1590827
20. Panetta K., Bao L., Agaian S. A New Unified Impulse Noise Removal Algorithm Using a New
Reference Sequence-to-Sequence Similarity Detector // IEEE Access. 2018. V. 6. P. 37225—37236.
doi: 10.1109/access.2018.2850518
21. Orengo M.S. a. M. Similarity of color images // Proceedings of SPIE — The International Society for
Optical Engineering. 1995. doi: 10.1117/12.205308
Дефектоскопия
№ 11
2021