Акустические методы
УДК 620.179.16; 620.179.14
ДИНАМИЧЕСКАЯ КОРРЕКЦИЯ ЧУВСТВИТЕЛЬНОСТИ
ДЕФЕКТОСКОПИЧЕСКИХ КАНАЛОВ ПРИ ВЫСОКОСКОРОСТНОМ
КОНТРОЛЕ РЕЛЬСОВ
© 2021 г. А.А. Марков1,*, Е.А. Максимова1, А.Г. Антипов2
1АО «Радиоавионика», Россия 190005 Санкт-Петербург, Троицкий пр., 4Б
2Санкт-Петербургский государственный университет, Россия 199034 Санкт-Петербург,
Университетская наб., 7/9
*E-mail: amarkovspb@gmail.com
Поступила в редакцию 30.09.2021; после доработки 09.11.2021
Принята к публикации 12.11.2021
Рассмотрено повышение достоверности высокоскоростного ультразвукового контроля длинномерных объектов, в
частности железнодорожных рельсов. Показано, что действующие нормативные документы не учитывают особенности
высокоскоростного контроля рельсов, ориентированы на соблюдение первоначально заданных параметров и не могут
обеспечить требуемую достоверность обнаружения дефектов. Рассмотрены факторы, проявляющиеся при больших
скоростях сканирования и негативно влияющие на качество контроля. Большинство этих факторов не поддаются коли-
чественной оценке для их учета и корректировки параметров контроля. Выполнена оценка возможной недобраковки
дефектов при работе по действующим требованиям.
Для обеспечения более надежного контроля в непрогнозируемых и динамичных условиях высоких скоростей ска-
нирования предложено оценивать текущую чувствительность контроля путем анализа сигналов от типовых конструк-
тивных отражателей контролируемого объекта. В качестве таких отражателей при контроле рельсов возможно исполь-
зовать типовые отверстия в зоне болтовых стыков, регулярно встречающихся по пути сканирования. Получено выраже-
ние для определения величины коррекции чувствительности контроля с учетом скорости сканирования и измеряемых
параметров сигналов от отверстий. Предложен алгоритм динамической корректировки чувствительности контроля,
повышающий достоверность обнаружения дефектов в условиях высокоскоростного сканирования.
Ключевые слова: рельсовая дефектоскопия, высокоскоростной контроль, условные размеры дефекта, чувствитель-
ность, болтовые отверстия, негативные факторы, динамическая коррекция.
DOI: 10.31857/S0130308221120010
1. ОБОСНОВАНИЕ АКТУАЛЬНОСТИ
Сплошной контроль рельсов осуществляется передвигаемыми операторами дефектоскоп-
ными тележками (со скоростью перемещения V до 5 км/ч), вагонами-дефектоскопами (до
60—80 км/ч) и высокоскоростными (до 120 км/ч) дефектоскопическими комплексами [1—5].
При контактном способе ввода ультразвуковых (УЗ) колебаний в металл рельсов на высо-
ких (60—120 км/ч) скоростях сканирования проявляются разнообразные факторы, негативно
влияющие на качество контроля [6]: нестабильность акустического контакта; отличие темпе-
ратуры контролируемых рельсов от той, при которой проводилась настройка [7—9]; состояние
поверхности катания и поверхностных слоев рельсов [10]; износ протекторов (донышек) УЗ
преобразователей (ПЭП); компрессия условных размеров отражателей [6, 11].
При одновременном воздействии нескольких факторов некоторые из них могут взаимно
компенсировать друг друга, а суммарное воздействие других может привести к полной потере
контроля. Например, при уменьшении толщины протектора ПЭП в процессе проезда (от 4,0 до
0,2 мм) и снижении температуры окружающего воздуха (и рельсов) чувствительность контро-
ля возрастает. При увеличении скорости сканирования чувствительность уменьшается, взаим-
но компенсируя изменение общей чувствительности контроля. С другой стороны, одновремен-
ное воздействие даже двух факторов: повышение температуры воздуха (от 0° до 40°С) и уве-
личение скорости сканирования от 20 до 100 км/ч может вызвать уменьшение амплитуды
сигналов и сокращение зоны локации (условной протяженности ΔL) отражателей более чем на
20 % [11], что может суммарно привести к недобраковке (пропуску) сигналов от опасного
дефекта.
Таким образом, значения измеряемых параметров от искомых дефектов зависят от многих
разнообразных факторов. Оценка количественного вклада каждого фактора на конечный
результат (на достоверность и надежность контроля) требует проведения сложных экспери-
ментальных исследований и не всегда корректно выполнимо. В то же время, достоверность
контроля рельсов средствами дефектоскопии во многом зависит от соблюдения заданных
4
А.А. Марков, Е.А. Максимова, А.Г. Антипов
параметров в процессе контроля. Естественно, в широком диапазоне скоростей контроля экс-
плуатирующихся рельсов (5—120 км/ч) обеспечить необходимую стабильность и эффектив-
ность дефектоскопирования с первоначально установленными параметрами контроля мало-
вероятно.
Актуальность достижения и сохранения требуемой достоверности контроля рельсов много-
кратно возрастает в связи с принятой в мире тенденцией перехода от низкопроизводительных
дефектоскопных тележек на скоростные (до 80 км/ч) и высокоскоростные (до 120 км/ч) диа-
гностические комплексы [3, 5, 12]. Поэтому исследования, направленные на разработку техно-
логии динамической корректировки параметров (чувствительности) ультразвукового контроля
с учетом воздействующих при высокоскоростном контроле факторов, являются своевременны-
ми.
2. АНАЛИЗ ЗАВИСИМОСТИ КОЛИЧЕСТВА ВЫЯВЛЯЕМЫХ ДЕФЕКТОВ
И ИХ УСЛОВНЫХ РАЗМЕРОВ ОТ ЧУВСТВИТЕЛЬНОСТИ КОНТРОЛЯ
Условная протяженность пачек эхосигналов ΔL (ГОСТ 18576—96) при анализе дефекто-
грамм многоканального УЗ контроля длинномерных изделий является простым и информатив-
ным параметром отражателей (дефектов). Размеры пачек сигналов позволяют оператору практи-
чески мгновенно (визуально) отделить полезные сигналы от конструктивных отражателей и
дефектов в рельсах от всевозможных помех УЗ контроля, а также оценить степень развития
(размер) дефектов. В рельсовой дефектоскопии браковочные признаки сигналов также ориенти-
рованы на оценку условной протяженности ΔL, а не максимальной амплитуды искомых дефек-
тов [13—15].
Оценка сигналов путем измерения условных размеров выявляемых дефектов, а не их ампли-
туд, как это принято при ручном контроле, имеет теоретическое обоснование. Еще в 1966 г.
И.Н. Ермолов показал, что при контроле изделий наклонными ПЭП основными характеристиками
обнаруживаемых дефектов должны являться условные размеры, а амплитуда — дополнительным
параметром [16]. Особенно это важно при контроле изделий ограниченных размеров (например,
рельсов), когда на формируемую амплитуду эхосигнала большое значение оказывает соотношение
фаз лучей, отраженных непосредственно от плоскости дефекта, и лучей, переотраженных от
поверхностей изделия и дефекта. Амплитуды эхосигналов от идентичных дефектов могут отли-
чаться в несколько раз в зависимости от глубины их расположения относительно поверхности
изделия. В исследованиях В.Г. Щербинского [8] и А.К. Гурвича [9] показано, что условные раз-
меры дефектов при абсолютном способе оценки монотонно увеличиваются с возрастанием истин-
ных размеров дефектов, что способствует более достоверной экспресс-оценке сигналов при визу-
альном анализе.
Ниже приведены результаты исследований зависимости условных размеров и выявляемости
реальных дефектов рельсов при изменении чувствительности контроля.
Выявляемость опасных дефектов рельсов в зависимости от чувствительности контроля (поро-
га регистрации сигналов) оценена с помощью базы данных Центра расшифровки Октябрьской
ж/д. Анализировали дефектограммы вагонов-дефектоскопов, полученных на участках смешанного
пассажирского и грузового движения при скоростях сканирования 35—45 км/ч. Измерены пачки
сигналов (с наибольшими значениями характеристик1) от 50 реальных дефектов, в основном, в
виде поперечных трещин в головке рельсов при их озвучивании наклонными ПЭП с углами ввода
70 и 58º. Построена зависимость количества Q выявляемых дефектов (в % от 50 шт. дефектов) при
разных амплитудных порогах регистрации N1… N8 с дискретностью 3 дБ (рис. 1). Оказалось, что
уменьшение чувствительности контроля на 15 дБ может привести к пропуску почти 80 % рассма-
триваемых дефектов. При дальнейшем снижении чувствительности еще на 6 дБ, только три из 50
дефектов были зарегистрированы.
Отображенная на этом же рисунке усредненная условная протяженность пачек сигналов от
анализируемых дефектов ΔLср в зависимости от уровня чувствительности показывает, что, в основ-
ном, снижение выявляемости дефектов происходит именно из-за уменьшения зоны локации. По
действующей НТД («Положение о расшифровке результатов неразрушающего контроля рельсов»,
утв. распоряжением ОАО «РЖД» от 09.01.2018 г. № ЦДИ-1/р) пачки сигналов от отражателей в
1Обычно дефект может быть зафиксирован несколькими каналами и с нескольких ракурсов, в том числе т.н. «наез-
жающими» и «отъезжающими» ПЭП [4].
Дефектоскопия
№ 12
2021
Динамическая коррекция чувствительности дефектоскопических каналов ...
5
ΔLср, мм
Q, %
100
100
Q
90
90
80
80
70
70
60
60
50
50
40
ΔL
40
ср
30
30
20
ΔLmin
20
10
10
0
0 0
3
6
9
12
15
18
21
Порог регистрации N, дБ
Рис. 1. Влияние уменьшения чувствительности контроля на количество Q выявленных дефектов и их усредненный
условный размер ΔLср.
рельсах с малым значением условного размера ΔL ˂ 20 мм (на графике — штриховая линия ΔLmin)
операторами по расшифровке могут не рассматриваться.
Таким образом, приведенные результаты (см. рис. 1) показывают, что даже при небольших
скоростях сканирования (около 40 км/ч) из-за воздействия неизбежных в реальных условиях нега-
тивных факторов изменение чувствительности контроля на 12—15 дБ может привести к пропуску
(недобраковке) значительного количества опасных дефектов. В связи с этим важно разработать
технологию отслеживания в текущий момент времени реальной чувствительности контроля и ее
оперативной корректировки при действии негативных факторов.
Принципы формирования сигналов от рассмотренных дефектов в головке рельсов и анализи-
руемых в работе отражателей в шейке практически идентичны, т.к. эхосигналы от них появляются
примерно в одинаковой временной зоне (в районе 60—110 мкс). Это вызвано тем, что дефекты в
головке, в основном, выявляются однократно отраженным лучом, а дефекты и отражатели в шейке
рельсов — прямым лучом.
3. ПРЕДЛАГАЕМАЯ ТЕХНОЛОГИЯ КОРРЕКЦИИ ПАРАМЕТРОВ НАСТРОЙКИ
3.1. Основная идея предлагаемой технологии
Даже приближенная оценка влияния некоторых факторов на измеряемый параметр ΔL показы-
вает, что при соблюдении действующей технологии с сохранением предварительной настройки
каналов при высокоскоростном сканировании можно ожидать значительные отклонения от перво-
начальных значений, которые могут привести к пропуску дефектов в рельсах. Таким образом,
действующая технология настройки УЗ каналов дефектоскопических комплексов несовершенна,
требует значительных временных (на тестирование, на контроль выполнения НТД) и материаль-
ных затрат и не обеспечивает необходимую достоверность контроля рельсов.
Основная идея предлагаемого способа заключается в измерении в процессе сканирования
текущих параметров сигналов от регулярных конструктивных отражателей (КО) объекта контро-
ля, сравнении измеренных параметров с их базовыми значениями и, при их значительном расхож-
дении, в формировании сигнала коррекции чувствительности контроля. Использование регулярно
встречающихся на пути сканирования типовых (одинаковых) КО позволяет объективно зафикси-
ровать воздействие негативных факторов и оперативно скорректировать параметры (чувствитель-
ность) контроля на конкретном участке пути.
Известен способ автоматической регулировки чувствительности каналов дефектоскопа по
уровню структурных шумов в контролируемых рельсах [17]. Однако, как показала практика, оцен-
ка только уровня шумов не дает необходимой информации для корректной регулировки чувстви-
тельности. Это всего лишь приводит к непомерному возрастанию объемов файлов дефектограмм
и к крайнему затруднению процедуры их передачи с бортов скоростных дефектоскопических
комплексов в региональные центры расшифровки дефектограмм. Важно, что сильно зашумленные
дефектограммы практически непригодны для визуального анализа и выявления дефектов.
Дефектоскопия
№ 12
2021
6
А.А. Марков, Е.А. Максимова, А.Г. Антипов
В процессе проведения контроля рельсового пути при существенном (например, более ± 10 %)
отклонении параметров принимаемых сигналов ΔLизм от базового значения ΔLб должна вырабаты-
ваться управляющая команда по корректировке чувствительности конкретного дефектоскопиче-
ского канала.
Регулярными КО рельсового пути, которые возможно и целесообразно использовать для кор-
рекции настройки каналов дефектоскопических средств, могут являться:
вторые и третьи отверстия в болтовых стыках (за исключением первых отверстий, не полно-
стью проверяемых из-за близости к торцам рельсов [6]);
донная поверхность рельсов (для настройки каналов прямых ПЭП с углом 0°);
угловые отражатели торцов рельсов в зоне болтовых стыков (образованные торцами и поверх-
ностями головки и подошвы рельсов);
сварные стыки рельсов, например, путем использования характерных отражений от структуры
металла в зоне термического влияния (Патент на изобретение № 2573707. Способ контроля каче-
ства сварки).
3.2. Обоснование выбора конструктивного отражателя
В данной работе, по примеру [6], исследования проведены для случая, когда в качестве КО
выбраны болтовые отверстия диаметром 36 мм болтовых стыков рельсов типа Р65, выполняемых
в заводских условиях в соответствии с требованиями ГОСТ Р 51685—2013.
Болтовые стыки являются самыми распространенными конструктивными отражателями на
сети дорог ОАО «РЖД». Несмотря на широкое внедрение бесстыкового пути, они имеются в
достаточном количестве (более 9 млн стыков) и регулярно фиксируются на дефектограммах.
Правомерность выбора сигналов от болтовых отверстий в качестве тестовых отражателей
можно обосновать следующими положениями:
зона залегания отражающих точек от стенки отверстий (h ≈ 105 мм) находится в зоне образо-
вания многих опасных дефектов в шейке рельса и в головке рельса (при однократном отражении
лучей от подголовочной грани);
амплитуды сигналов от отверстий и большинства обнаруживаемых дефектов сравнимы
(± 8 дБ);
достаточно большое количество реальных дефектов имеют условные размеры, близкие по зна-
чениям к условным размерам сигналов от отверстий.
Даже на бесстыковых участках пути, в среднем через каждые 800 м, для компенсации темпе-
ратурного расширения плети следуют от двух до четырех пар разрядных звеньев, соединенных
болтовыми стыками. Сигналы от болтовых отверстий на разрядных звеньях могут быть использо-
ваны для коррекции чувствительности контроля. Например, при движении дефектоскопического
комплекса со скоростью 30 м/с (108 км/ч) сигналы от 12 до 20 отверстий на каждой нитке пути
будут фиксироваться через каждые 27 с. Они могут успешно использоваться для определения
усредненных параметров сигналов от типовых отражателей и формирования корректирующего
сигнала регулировки усиления контроля.
В качестве базового значения ΔLб сигналов от КО целесообразно использовать усредненный
условный размер пачек сигналов от болтовых отверстий, полученных при благоприятных услови-
ях (малая скорость сканирования, стабильный акустический контакт и т.п.). Например, при контро-
ле рельсов за ΔLб можно принять значения параметров сигналов, полученных при периодической
(через 3—6 месяцев) проверке работоспособности мобильных средств на специальных испыта-
тельных участках пути в соответствии с требованиями ТИ 07.139-2020 (Инструкция по проверке
работоспособности средств неразрушающего контроля рельсов на испытательных участках пути,
утв. расп. ОАО «РЖД» № 1771/р от 19.08.2020). Как правило, скорости сканирования на этих
участках не превышают 30—40 км/ч, и основными измеряемыми характеристиками отражателей
являются их условные размеры ΔL.
4. ОПРЕДЕЛЕНИЕ ТРЕБУЕМОЙ ВЕЛИЧИНЫ КОРРЕКЦИИ УСИЛЕНИЯ
4.1. Исследование зависимости усиления от скорости сканирования
На рис. 2 приведены зависимости усредненной условной протяженности сигналов ΔL от бол-
товых отверстий на трех скоростях контроля: 20, 60 и 80 км/ч. Данные получены при обработке
Дефектоскопия
№ 12
2021
Динамическая коррекция чувствительности дефектоскопических каналов ...
7
100
90
80
70
60
20 км/ч
50
40
60 км/ч
30
20
80 км/ч
10
-12
-9
-6
-3
0
3
6
9
12
15
18
Порог регистрации N, дБ
Рис. 2. Зависимость усредненной условной протяженности ΔLизм болтовых отверстий от порога регистрации N на скоро-
стях контроля 20, 60 и 80 км/ч.
реальной дефектограммы участка рельсового пути протяженностью около 110 км Юго-Восточной
ж/д, проконтролированного скоростным дефектоскопическим комплексом «АВИКОН-03М». На
каждом пороге регистрации2 измерялись условные протяженности пачек сигналов от 50 болтовых
отверстий (отверстия вблизи торцов рельсов не учитывались) и определялось среднее значение
ΔLизм. На рис. 2 видно, что при всех скоростях контроля изменение амплитудного порога регистра-
ции сигналов (чувствительности контроля) приводит к уменьшению измеренной условной протя-
женности ΔLизм сигналов от отверстий по квадратичному закону. Например, при уменьшении
чувствительности на 30 дБ (от -12 до +18 дБ) значения ΔLизм падают на 60—70 %.
При анализе сигналов на уровне регистрации «-6 дБ», являющимся рабочим порогом при
поиске дефектных сечений, изменение скорости сканирования на 60 км/ч (с 20 до 80 км/ч) приво-
дит к уменьшению условных размеров отверстий в рельсах примерно на 30 мм (30 %) (расстояние
по вертикальной оси между крайними линиями на рис. 2).
Полученные выше зависимости показывают, что величина необходимой коррекции чувстви-
тельности дефектоскопического канала при высокоскоростном сканировании одновременно зави-
сит как минимум от двух взаимосвязанных факторов: от скорости сканирования и от условного
размера тестового отражателя. В действующих системах контроля текущие значения этих параме-
тров могут быть определены с достаточной для практики точностью.
Располагая данными, содержащими информацию об условной протяженности ΔL, скорости ска-
нирования V и пороге регистрации N, при котором проводились измерения (см. рис. 2), для имеюще-
гося набора сигналов от болтовых отверстий можно установить связь между указанными параметра-
ми. В частности, можно определить зависимость порога регистрации (чувствительности) от услов-
ной протяженности при любом фиксированном значении скорости и, тем самым, определить зависи-
мость требуемого значения корректировки чувствительности тракта ΔKу от измеренных значений ΔL
на текущей скорости V. Для этого нужно аппроксимировать конечный набор из M точек в трехмер-
ном пространстве:
M
{
V
, N
,∆L
}
(1)
m m
m m=1
поверхностью, отражающей связь между условной протяженностью, скоростью и порогом ото-
бражения.
Зададим указанную поверхность уравнением следующего вида:
I
J
i
∆L
a
V
N
j,
(2)
=∑∑
ij
i
=0
j
=0
2Некоторые отличия представления пороговых уровней на рис. 2 и 3 вызваны анализом сигналов, полученных с
разных мобильных средств, с несколько отличающимся программным обеспечением.
Дефектоскопия
№ 12
2021
8
А.А. Марков, Е.А. Максимова, А.Г. Антипов
где aij, i = 0, …, I, j = 0, …, J — некоторые коэффициенты. Определим такие значения коэффици-
ентов aij, при которых поверхность будет оптимальным образом соответствовать исходному набо-
ру данных, а, именно, когда сумма квадратов расстояний от поверхности до набора имеющихся
точек будет минимальной. Необходимо найти минимум функции многих переменных:
2
M
I
J
i
j
L
F a)=
∑
∆L
m
−
∑∑
a
V
ij m
N
m
m
=1
i
=0
j
=0
F
∂
L
Из условия на экстремум функции
F
:
=
0,
i
=
0,
,I,
j
=
0,,J
вытекает система из
L
∂
a
ij
(I +1)×(J +1) линейных алгебраических уравнений относительно коэффициентов aij:
I
J M
M
i+i′
j+ j′
i
j
∑∑∑
V
m
N
m i′j
a
′
=
∑
V
N
m m m
∆
L
,
i
=
0,,I,
j
=
0,,J
(3)
i′=
0
j′=
0
m
=1
m
=1
Если в качестве исходных точек в трехмерном пространстве (1) взять данные, изображенные
на рис. 2, и при описании поверхности (2) использовать степени скоростей и пороговых значений
не выше первой (I = 1, J = 1), то в результате решения системы уравнений (3) мы получим следу-
ющие значения четырех имеющихся в данном случае коэффициентов:
a
00
≈ 93,8, a
01
≈ -2,06, a
10
≈
- 0,432, a
11
≈ 0,00465,
и зависимость N от V и ΔL будет задаваться выражением:
∆L
a
V +a
10
00
N
=
-
(4)
a
V +a
a
V +a
11
01
11
01
На рис. 3 показана полученная связь между N, V и ΔL вместе с иcпользованными в расчетах
исходными данными.
Рис. 3. Поверхность в трехмерном пространстве, отображающая связь между условной протяженностью ΔL, скоростью
V и порогом регистрации N сигналов контроля.
На рис. 4 представлены зависимости N (ΔL) для нескольких фиксированных значений скорости
(40, 60, 80, 100 км/ч).
Из рис. 4 видно, что, например, при скорости движения 100 км/ч для измеренного усреднен-
ного размера пачки сигналов от типовых отверстий ΔLизм = 70 мм, чтобы достигнуть некоторой
Дефектоскопия
№ 12
2021
Динамическая коррекция чувствительности дефектоскопических каналов ...
9
40 км/ч
60 км/ч
36
80 км/ч
100 км/ч
30
24
ΔKу
18
12
6
0
0
20
40
60
80
100
ΔL, мм
ΔLизм
–6
ΔL
б
-12
Рис. 4. Пример определения величины требуемой коррекции усиления ΔKу при заданных ΔLб , скорости V и текущего
значения ΔLизм = 70 мм.
базовой протяженности ΔLб = 90 мм, требуется ввести усиления на 12 дБ. В общем случае зави-
симость требуемой величины усиления от ΔLб, ΔLизм и скорости V выражается следующей
формулой:
L -∆L
∆
èçì
∆K
ó
=-á
(5)
a
V +a
11
01
Для фиксированного базового значения Lб = 90 мм (измеренного при благоприятных усло-
виях, на малых скоростях сканирования с хорошим акустическим контактом) по выражению
(5) можно построить зависимости, показывающие величину необходимой коррекции усиления
приемного тракта дефектоскопического канала ΔKу при снижении в ходе рабочего проезда
текущего значения условной протяженности сигналов от тестовых отверстий ΔLизм (рис. 5).
Видно, что в диапазоне практических значений условной протяженности болтовых отверстий
(например, в пределах от 90 до 40 мм) величина необходимой корректировки усиления ΔKу
может составить около 30 дБ.
100 км/ч
80 км/ч
60 км/ч
40 км/ч
51
48
45
42
39
36
33
30
27
24
21
18
15
12
9
6
3
0
10
20
30
40
50
60
70
80
90
Измеренная условная протяженность болтовых отверстий ΔLизм, мм
Рис. 5. Величина коррекции усиления ΔKу при изменении измеренной условной протяженности сигналов от болтовых
отверстий ΔLизм (при Lб = 90 мм).
Дефектоскопия
№ 12
2021
10
А.А. Марков, Е.А. Максимова, А.Г. Антипов
Погрешность измерения условной протяженности отражателей и дефектов ΔLизм (рис. 1—6)
складывается из дискретности посылок зондирующих импульсов и точности ручного измерения
пачек сигналов по экрану компьютера и не превышает 4 % (рассчитана при измерении не менее 30
отверстий и усредненного значения ΔLизм = 40 мм на скорости 100 км/ч, см. рис. 6). Указанная
погрешность может быть минимизирована при излучении/приеме УЗ колебаний с помощью сдво-
енных ПЭП и при программной автоматизации измерения условных размеров (автоматическая
расшифровка дефектограмм). Эти функции во многом уже реализованы в современных образцах
диагностических комплексов.
Дополнительно проведена оценка погрешности измерения условной протяженности ΔLизм сиг-
налов от болтовых отверстий при многократных проездах. Для этого в трех разных файлах про-
ездов вагона-дефектоскопа по однотипным участкам пути Октябрьской ж/д в канале ПЭП 45°
измерили по 50 отверстий на приблизительно одинаковой скорости контроля (около 45 км/ч).
Разброс полученных усредненных значений ΔLизм отверстий не превышает 5,5 %. Это подтвержда-
ется и опытом многолетнего визуального анализа УЗ дефектограмм сплошного контроля рельсов:
при номинальных параметрах контроля средний размер ΔLизм пачек сигналов от болтовых отвер-
стий (за исключением первых отверстий) от проезда к проезду существенно не меняется. Ранее это
позволило разработчикам НТД (Положение по расшифровке от 09.01.2018 г. № ЦДИ-1/р) устано-
вить фиксированное значение пороговой величины ΔLmin (см. рис. 1).
Таким образом, можно считать, что результирующая погрешность определения усредненного
значения ΔLизм на практике не превышает 5,5 % при корректной настройке УЗ каналов.
Как видно на рис. 5, для одного и того же значения ΔLизм разброс значений ΔKу для разных
скоростей сканирования составляет незначительную величину. Например, во время проезда
дефектоскопного средства от набора отверстий получено усредненное значение Lизм = 40 мм.
Величина необходимой коррекции усиления на скорости 100 км/ч отличается от аналогичной
величины коррекции на скорости 40 км/ч всего на 5 дБ. Основное влияние скорости сканирования,
как показано в [6, 11], уже опосредованно заложено в динамическом изменении параметра ΔLизм.
Это обстоятельство может существенно облегчить практическую реализацию системы авто-
матической динамической корректировки усиления по измеряемым параметрам сигналов от
тестовых отражателей (от болтовых отверстий). Достаточно лишь измерить текущее значение
ΔLизм от набора отверстий и скорректировать чувствительность канала на определенное по гра-
фику рис. 5 значение ΔKу. При этом сигналы от последующих типовых отражателей будут иметь
значения, близкие к ΔLб, а потенциальные дефекты в рельсах будут обнаруживаться так же, как
и при нормальных условиях сканирования.
При недостатке предусмотренного в аппаратуре диапазона регулировки усиления, рассчитан-
ного по выражению (5), коррекцию чувствительности можно осуществить путем частичной регу-
лировки усиления плюс дискретного увеличения амплитуды зондирующего импульса, как это
предусмотрено в современных диагностических комплексах.
ΔLизм, мм
ΔKу, дБ
100
30
90
27
ΔLизм
ΔK
у
80
24
70
21
60
18
50
15
40
12
30
9
20
6
10
3
0
0 20
30
40
50
60
70
80
90
100
Скорость контроля V, км/ч
Рис. 6. Зависимость условной протяженности ΔLизм пачек сигналов от болтовых отверстий (левая ось) и величины
коэффициента усиления ΔKу (правая ось) при увеличении скорости контроля.
Дефектоскопия
№ 12
2021
Динамическая коррекция чувствительности дефектоскопических каналов ...
11
Несмотря на зависимость искомого параметра ΔKу в общем случае от нескольких параметров
(ΔLизм, ΔLб, V и коэффициентов a11 и a01), для практической реализации в рабочем диапазоне ско-
ростей сканирования может быть получена упрощенная зависимость величины корректировки
коэффициента усиления ΔKу при увеличении скорости контроля (см. рис. 6).
Рис. 6 демонстрирует, что с увеличением скорости сканирования на каждые 10 км/ч условный
размер болтовых отверстий ΔLизм уменьшается в среднем на 6—7 %. При увеличении скорости с
20 до 100 км/ч для сохранения качества проводимого контроля следует увеличить чувствитель-
ность (в данном примере — на 28—30 дБ).
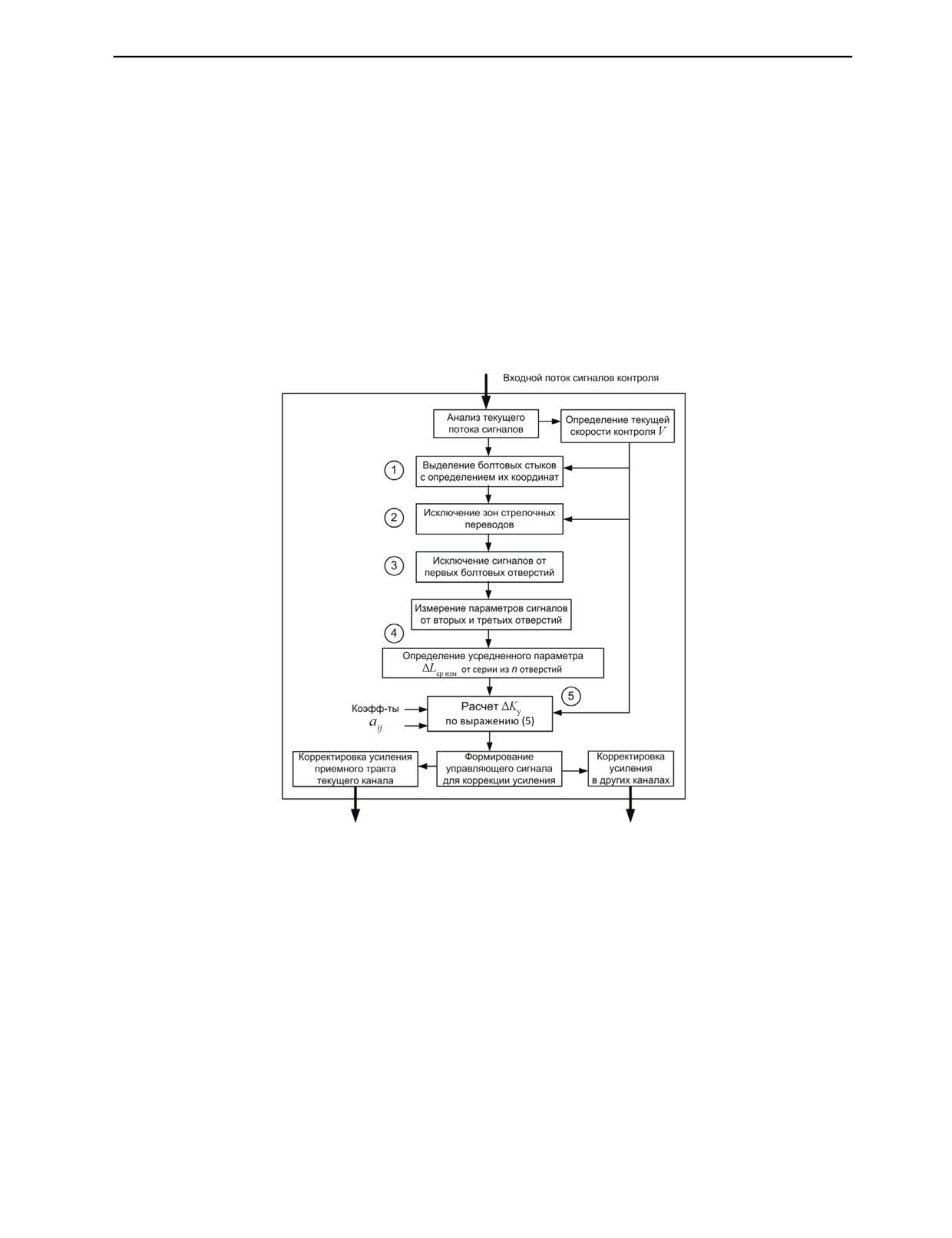
4.2. Алгоритм динамической коррекции чувствительности контроля
Последовательность операций по динамической (во время проезда скоростного дефектоскопа)
корректировке чувствительности контроля с учетом получаемых характеристик сигналов от бол-
товых отверстий можно представить в виде следующего алгоритма (рис. 7).
Рис. 7. Примерный алгоритм динамической коррекции чувствительности контроля.
Во время проезда из потока принимаемых в процессе сканирования сигналов по специальному
алгоритму (подпрограмма 1 на рис. 7) выделяются группы сигналов в зоне болтовых стыков. Из
потока данных целесообразно исключить сигналы, получаемые в зонах стрелочных переводов
(кроме сигналов от примыкающих разрядных звеньев). В этих зонах ходовая часть любой подвиж-
ной единицы испытывает значительные динамические воздействия [18], и сигналы, получаемые
на этих участках, могут отличаться от сигналов, фиксируемых на перегонах. Ввиду особенностей
данных участков, вопросы обеспечения корректного контроля на стрелочных переводах должны
рассматриваться отдельно. Возможный вариант распознавания зон стрелочных переводов (под-
программа 2 на рис. 7) и даже их проектов (типов) предложен в патенте на изобретение № 2652673
«Способ определения стрелочных переводов и положения остряков».
Как показано в [6], при сплошном сканировании принятыми схемами УЗ прозвучивания пер-
вые болтовые отверстия (подсчет от стыкового зазора) озвучиваются не полностью из-за малой
протяженности зоны локации со стороны торцов рельсов. Поэтому с помощью специальной под-
программы 3 (см. рис. 7) сигналы от первых болтовых отверстий должны быть также исключены
Дефектоскопия
№ 12
2021
12
А.А. Марков, Е.А. Максимова, А.Г. Антипов
из рассмотрения. Измерение параметров набора вторых и третьих отверстий, определение их
усредненной условной протяженности ΔLср изм, а также сравнение полученного параметра с базо-
вым значением ΔLб выполняется в отдельной подпрограмме 4. По полученным данным (ΔLизм и V)
с помощью выражения (5) подпрограммой 5 рассчитывается требуемая величина коррекции ΔKу
и формируется управляющий сигнал для коррекции коэффициента усиления приемного тракта
конкретного дефектоскопического канала.
Для корректировки параметров других УЗ каналов (ПЭП 58º, 70º, 0º) в процессе сканирования
могут быть использованы конструктивные отражатели рельсов, указанные в разд. 3.1. Все это тре-
бует дополнительных исследований, однако соответствующие подходы выравнивания параметров
контроля и алгоритм корректировки параметров высокоскоростной дефектоскопии остаются
общими.
При существенном отличии характеристик контролируемого участка пути (рельсы других про-
изводителей, пропущенный тоннаж, грузонапряженность и т.п.) возможно потребуется предвари-
тельная корректировка коэффициентов aij в выражении (5). В общем случае можно организовать
определение закономерности поведения условных размеров типовых отражателей (например,
болтовых отверстий), аналогично рис. 6, и расчет коэффициентов aij в процессе рабочего проезда
после набора скорости сканирования до определенной величины.
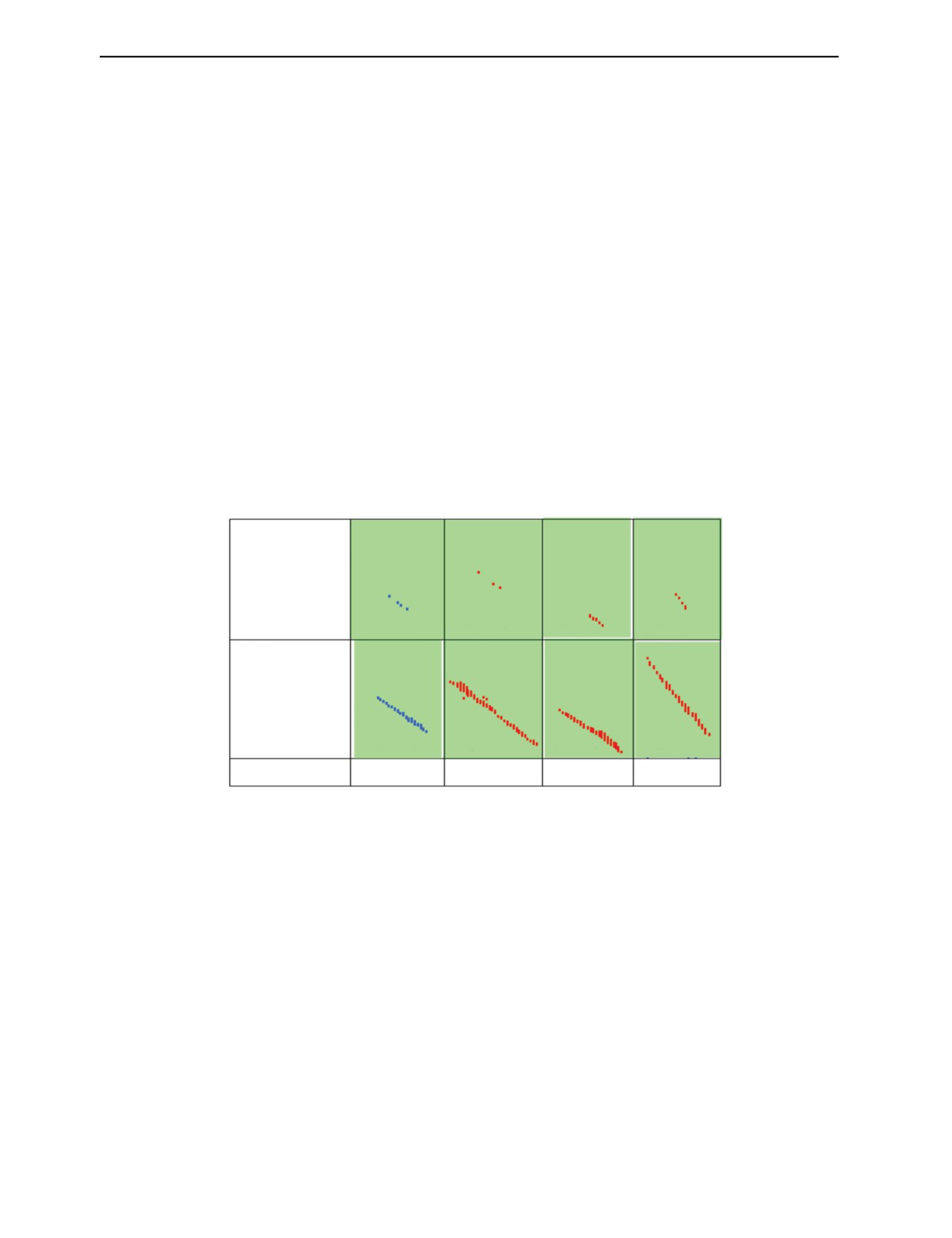
Предварительная проверка предложенного принципа корректировки чувствительности дефек-
тоскопических каналов проведена на реальных дефектах в головке рельсов (рис. 8). Как видно,
после добавления усиления ΔKу условные размеры пачек сигналов от дефектов увеличились в
3—6 раз, что обеспечивает их надежное обнаружение.
Дефект 1
Дефект 2
Дефект 3 Дефект 4
а
До коррекции
ΔL1
19 мм
19 мм
12 мм
17 мм
б
После
коррекции
чувствительности
ΔL2
50 мм
87 мм
63 мм
99 мм
ΔKу
+9 дБ
+12 дБ
+15 дБ
+20 дБ
Рис. 8. Размеры пачек сигналов от дефектов рельсов до (а) и после (б) корректировки чувствительности контроля.
Как показывает практика, с увеличением чувствительности контроля не происходит суще-
ственное возрастание шумовой составляющей. Видимо, это связано с идентичным воздействием
негативных факторов при больших скоростях сканирования как на амплитуду сигналов от
дефектов, так и на уровень шумов.
Кроме выравнивания чувствительности каналов при внешних воздействиях, отслеживание
процедур автоматического управления параметрами каналов может дать дополнительную
информацию о работе многоканальной дефектоскопической системы. Если в процессе контро-
ля из нескольких однотипных каналов один из них в процессе рабочего проезда требует более
частой корректировки чем остальные, то это является поводом для более детального анализа
акустического тракта с целью выяснения и устранения причины нестабильности. Например,
для контроля сечения рельса в проекции шейки используются по два наклонных ПЭП с α = 45°
для каждой нитки пути. При этом три канала (при контроле обеих ниток) требуют, в соответ-
ствии с приведенным выше алгоритмом, весьма плавных регулировок с изменением скорости,
а для нормальной работы одного канала, формирующего пачки сигналов от болтовых отвер-
стий меньшей протяженности, управляющее воздействие пришлось оказывать многократно,
Дефектоскопия
№ 12
2021
Динамическая коррекция чувствительности дефектоскопических каналов ...
13
причем не всегда из-за изменения скорости контроля. Детальный анализ после проезда позво-
лил выяснить, что механика крепления акустического блока, на котором расположен данный
ПЭП, требует замены из-за значительного износа.
Таким образом, предлагаемая технология оперативной (динамической) корректировки чув-
ствительности с использованием отражений от конструктивных элементов контролируемого объ-
екта в условиях высокоскоростного контроля и/или действия неблагоприятных факторов позволит
повысить достоверность обнаружения дефектов.
ВЫВОДЫ
1. При контроле рельсов на высоких скоростях сканирования (до 120 км/ч) неизбежные
воздействия негативных факторов приводят к существенному ухудшению качества контроля и
к уменьшению основного измеряемого параметра — условного размера ΔL потенциальных
дефектов.
2. Действующая технология настройки дефектоскопических каналов в стационарных условиях
и неизменность этих настроек при разных скоростях сканирования не обеспечивает требуемое
качество контроля и может привести к пропуску опасных дефектов.
3. С целью сохранения стабильного качества контроля при увеличении скорости контроля
предложено корректировать чувствительность приемного тракта дефектоскопических каналов с
учетом измерения условных размеров типовых отражателей в контролируемом изделии (напри-
мер, болтовых отверстий в рельсах).
4. Предложенный алгоритм динамической корректировки чувствительности при высокоско-
ростном контроле может быть реализован на практике и будет способствовать повышению досто-
верности обнаружения дефектов.
Авторы благодарят главного специалиста по дефектоскопии АО «Радиоавионика» С.Л. Молоткова
за ценные замечания и предложения, высказанные в процессе подготовки статьи.
СПИСОК ЛИТЕРАТУРЫ
1. Clark R. Rail flaw detection: Overview and needs for future developments // NDT & E Intеrnational.
2004. V. 37. No. 2. Mar. 2004. P. 111—118.
2. Крауткремер Й., Крауткремер Г. Ультразвуковой контроль материалов / Справочник. М.:
Металлургия, 1991. 752 с.
3. Xu P., Zhu C., Zeng H., Wang P. Rail crack detection and evaluation at high speed based on differential
4. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2.
Расшифровка дефектограмм. С-Пб.: Ультра Принт, 2014. 332 с.
5. Тарабрин В.Ф. Система стандартизации и метрологического обеспечения скоростных средств
дефектоскопии рельсов при их производстве и эксплуатации // Контроль. Диагностика. 2021. № 5 (275).
С.14—29.
6. Markov A.A., Maximova E.A. Analyzing Ultrasonic Signal Parameters during High-Speed Rail
Inspection // Russian Journal of Nondestructive Testing. 2021. V. 57. No. 3. P. 181—194. [Марков А.А.,
Максимова Е.А. Анализ параметров ультразвуковых сигналов при высокоскоростном контроле рельсов
// Дефектоскопия. 2021. № 3. С. 3—16.]
7. Гурвич А.К., Ермолов И.Н. Ультразвуковой контроль сварных швов. Киев: Техника, 1972. 460 с.
8. Щербинский В.Г. Технология ультразвукового контроля сварных соединений. М.: Изд-во
«СВЕН», 2014. 494 с.
9. Гурвич А.К., Кузьмина Л.И. Справочные диаграммы направленности искателей ультразвуковых
дефектоскопов. Киев: Техника, 1980. 101 с.
10. Муравьев В.В., Муравьева О.В., Байтеряков А.В. Структурно-чувствительные акустические па-
раметры конструкционных сталей. Ижевск: Изд-во ИжГТУ, 2020. 151 с.
11. Марков А.А. Особенности оценки условных размеров дефектов при значительных скоростях
сканирования // Дефектоскопия. 1989. № 3. С. 8—16.
12. Yuan F., Yu Y., Wang W., Tian G. A Novel Probe of DC Electromagnetic NDT Based on Drag Effect:
Design and Application in Crack Characterization of High-Speed Moving Ferromagnetic Material // IEEE
13. Марков А.А., Захарова О.Ф., Мосягин В.В. Применение развертки типа «В» для обнаружения
трещин в зоне отверстий болтовых стыков железнодорожных рельсов // Дефектоскопия. 1999. № 6.
С. 78—92.
14. Huang X.Y., Shi Y.S., Zhang Y.H., Li P., Xiong L.H., Zhong Y.C. BP neural network based on rail flaw
classification of RFD car’s B-scan data // China Railway. 2018. No. 03. P. 82—87.
Дефектоскопия
№ 12
2021
14
А.А. Марков, Е.А. Максимова, А.Г. Антипов
15. Молотков С.Л. Чувствительность и амплитудные измеряемые характеристики дефекта. Обзор
изменений в рельсовой дефектоскопии за четверть века // В мире неразрушающего контроля. 2020.
№ 3 (89). С. 62—73.
16. Ермолов И.Н. Методы ультразвуковой дефектоскопии. Ч.1. Московский горный институт, 1966.
267 с.
17. Тарабрин В.Ф., Чистякова О.Е., Кисляковский О.Н., Кононов Д.А. Автоматическая регулировка
чувствительности каналов дефектоскопа с использованием адаптивного порога // В мире неразрушаю-
щего контроля. 2016. Т. 19. № 3. С. 77—80.
18. Ермаков В.М., Егоров М.А. Динамическое моделирование взаимодействия стрелочного перевода
с подвижным составом // Железнодорожный транспорт. 2016. № 8. С. 64—66.
Дефектоскопия
№ 12
2021