УДК 620.179.162
УЛЬТРАЗВУКОВОЙ АДАПТИВНЫЙ ТОМОГРАФ БЕТОННЫХ ИЗДЕЛИЙ
С НЕСТАНДАРТНОЙ КОНФИГУРАЦИЕЙ
© 2021 г. В.К. Качанов1,*, И.В. Соколов1, Р.В. Концов1, М.Б. Федоров1, В.В. Первушин1
1Национальный исследовательский университет «МЭИ», Россия 111250 Москва,
ул. Красноказарменная, 14
E-mail: *kachanovvk@mail.ru
Поступила в редакцию 13.10.2021; после доработки 22.11.2021
Принята к публикации 23.11.2021
Показано, что для ультразвуковой томографии бетонных строительных конструкций с нестандартной конфигура-
цией поверхности следует использовать ультразвуковые адаптивные антенные решетки, позволяющие принимать
форму неплоской поверхности контролируемого изделия. Также следует применять адаптивные методы ультразвуко-
вой томографии, позволяющие одновременно определять координаты дефектов и скорость ультразвуковых колебаний
в бетоне и подстраивать параметры зондирующих сигналов под характеристики бетонных изделий.
Ключевые слова: ультразвуковая томография изделий из бетона, адаптивная антенная решетка, безэталонный
способ определения скорости ультразвуковых волн, алгоритм «фокусировка в точку».
DOI: 10.31857/S0130308221120022
ПРОБЛЕМА КОНТРОЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ ИЗ БЕТОНА С
НЕСТАНДАРТНОЙ КОНФИГУРАЦИЕЙ
С помощью одноканальных приборов ультразвукового (УЗ) эхо-импульсного контроля не уда-
ется контролировать строительные конструкции (СК) толщиной более 1 м из-за аномально боль-
шого интегрального затухания ультразвука в крупногабаритных СК из бетона [1]. Поэтому для
контроля изделий из бетона в последние годы используют УЗ томографы с фазированными антен-
ными решетками (АР) [2—6].
В УЗ томографии изображение контролируемого изделия осуществляется с использованием
алгоритма «фокусировка в точку», при котором с помощью АР производится фокусировка УЗ
луча последовательно в каждую j-ю точку изделия [7]. Построение изображения изделия осу-
ществляется посредством последовательного излучения каждым элементом антенны УЗ зонди-
рующего сигнала, который проходит путь LΣj= Lизл + Lотр.j, состоящий из пути Lизл от излучаю-
щего преобразователя (ИП) до j-й точки изделия и пути Lотр.j от отражателя в j-й точки до каж-
дого приемного преобразователя (ПП) антенны. Время задержки сигналов Тзад.j для каждой j-й
точки изделия (для каждого канала) определяется по времени прохождения импульса от ИП до
дефекта и далее до каждого ПП антенны: Тзад.j =LΣj /С= (Lизл+Lотр.j)/С (где С — скорость ультра-
звука в бетоне). При наличии в j-й точке отражателя (дефекта или акустической неоднородно-
сти) после когерентного суммирования сигналов во всех каналах формируется импульс с ампли-
тудой UΣj. При отсутствии отражателя амплитуда эхосигнала, отраженного от j-й точки, равна
нулю. Аналогично проводится последовательная фокусировка УЗ сигналов в каждую точку
объекта контроля, а затем по совокупности эхосигналов, отраженных от всех точек изделия,
строится томограмма объекта контроля (ОК).
Принцип построения УЗ линейных АР позаимствован у радиолокационных антенн, у кото-
рых расстояние между n элементами решетки d составляет примерно половину длины волны
λ электромагнитных колебаний, а зондирующие импульсы представляют собой гармонические
сигналы с фиксированной частотой. Так как скорость электромагнитных колебаний неизменна,
то в радиолокационных антеннах обеспечивается неизменное соотношение d/λ ≈ 0,5, которое
позволяет осуществлять когерентное суммирование парциальных гармонических сигналов и
формировать диаграмму направленности (ДН) антенн с минимальным уровнем боковых лепест-
ков [8, 9].
В отличие от радиолокации скорость ультразвука в различных изделиях из бетона разная.
Поэтому при контроле СК следует предварительно определять значение скорости ультразвука
для данной марки бетона. Кроме того, из-за разброса скоростей в бетонных ОК сложно реализо-
вать условие d/λ ≈ 0,5 при жесткой конструкции УЗ линейной АР с постоянным шагом d (напри-
мер, в УЗ томографе А1040 MIRA шаг АР фиксирован и равен d = 30 мм [10]). Из-за этого в ДН
16
В.К. Качанов, И.В. Соколов, Р.В. Концов и др.
УЗ антенны присутствуют боковые лепестки, ухудшающие качество изображения СК в области,
расположенной с боку от АР. Поэтому в УЗ томографах ограничивают угол обзора АР областью,
расположенной под АР.
Все существующие УЗ томографы СК из бетона ориентированы на контроль изделий с пло-
ской поверхностью (стен, перекрытий зданий, дорожных покрытий, фундаментов и др.), кото-
рые можно назвать изделиями со стандартной конфигурацией поверхности. АР таких томогра-
фов «работают» по принципу «совмещенного» пьезоэлектрического преобразователя (ПЭП),
когда один и тот же ПЭП (одна и та же АР) и излучает зондирующий импульс и принимает
эхо-сигнал. Однако с помощью таких традиционных УЗ томографов не удается контролировать
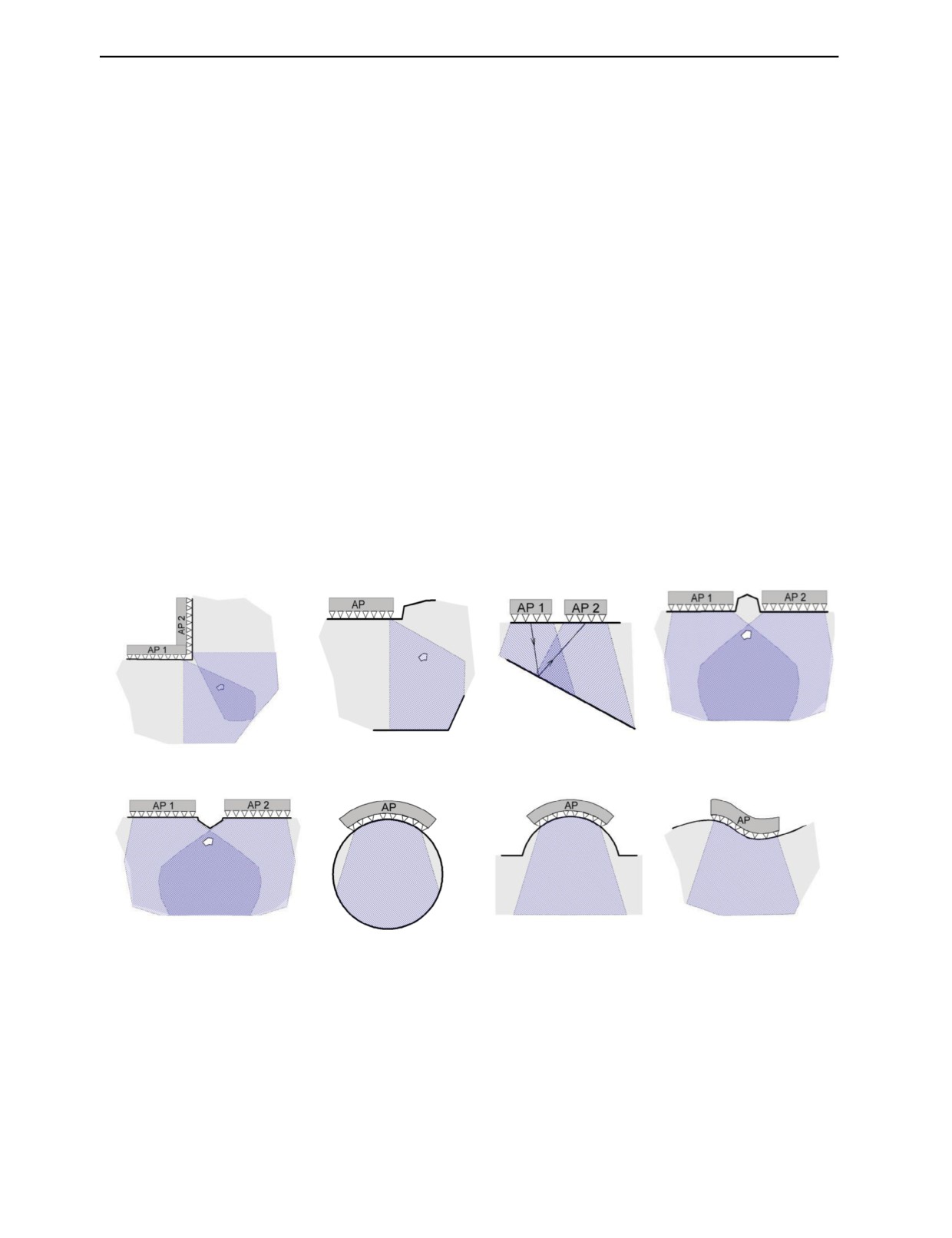
СК с нестандартной (неплоской) конфигурацией поверхности. Ниже приведен ряд таких нестан-
дартных объектов.
Во-первых, это широко распространенные СК типа «соединение двух стен», которые образу-
ют поверхности типа «внутренний угол» (рис. 1а, б). В этом случае существует проблема поис-
ка дефектов, находящихся в области стыка двух стен. С помощью традиционных АР такой
дефект обнаружить не удается из-за ограниченного угла обзора антенны. Поэтому для контроля
подобных СК следует использовать АР с относительно большим углом наклона УЗ луча при
использовании двух раздельных АР (а) или одной АР (б). При наличии двух АР возможно их
использовать в различных режимах: как «излучающая» (АР1) и «приемная» (АР2), или в режиме
своеобразной «совмещенной» АР, когда обе части и излучают и принимают УЗ сигналы.
Контролю таких угловых соединений посвящена статья [11], где показывается, что при боковом
излучении оптимальный шаг АР уменьшается: d ≈ 0,4λ. Если же шаг АР больше оптимального,
то при таком наклонном излучении отношение сигнал/структурный шум уменьшается, струк-
турный шум возрастает, что ограничивает возможность обнаружения дефекта в угловой зоне СК
из сложно-структурного бетона.
а
б
г
в
е
д
ж
з
Рис. 1. Примеры нестандартных СК:
а — угловое соединение двух стен; б — наличие выступа на стене; в — СК с отражающей поверхностью, расположенной
под углом к плоскости контроля; г — СК с наличием выступа на поверхности; д — СК с наличием впадины;
е — колонна; ж — полуколонна; з — СК с произвольной формой поверхности.
Во-вторых, к нестандартным объектам контроля следует отнести изделия, у которых поверх-
ность отражения не параллельна поверхности контроля. Из схемы на рис. 1в видно, что и в этом
случае необходимо обеспечить наклонное излучение УЗ сигнала, так как иначе при использовании
«совмещенной» АР с ограниченной апертурой не всегда возможно зафиксировать зеркально отра-
женные сигналы от плоскостей, расположенных под большим углом к плоскости контроля. В [12]
Дефектоскопия
№ 12
2021
Ультразвуковой адаптивный томограф бетонных изделий ...
17
мы показали, что для обнаружения отраженного от наклонного дна эхосигнала следует использо-
вать предложенный в МЭИ алгоритм работы УЗ ФАР «фокусировка на плоскость», при котором
АР разделена на две раздельные АР (излучающую (АР1) и приемную (АР2)), что предполагает
создание иного алгоритма работы УЗ томографа.
В-третьих, к СК с нестандартной конфигурацией следует отнести изделия, у которых на
плоской поверхности имеются выступы (г) или впадины (д). В этом случае следует использовать
две раздельные АР, т.к. «совмещенную» АР невозможно разместить над дефектным местом.
В-четвертых, это изделия типа колонна (е) или полуколонна (ж). Очевидно, что в этих слу-
чаях необходима разработка АР, форма которой принимает форму круглой или овальной поверх-
ности СК.
В-пятых, это разнообразные бетонные изделия с неплоскими поверхностями, которые полу-
чили широкое распространение по мере развития строительства зданий из монолитного бетона (з).
Для контроля каждой такой нестандартной СК необходима разработка раздельной или раз-
дельно-совмещенной АР, форма которой принимает форму поверхности изделия, однако заранее
предугадать форму таких нестандартных объектов контроля достаточно сложно. Поэтому, учи-
тывая большое разнообразие возможных форм СК из бетона, целесообразно для решения ука-
занных задач разрабатывать не индивидуальное устройство для каждой новой конфигурации
СК, а создавать универсальный томограф с адаптивной антенной решеткой, принимающей
форму того или иного ОК. При этом одновременно необходимо разрабатывать адаптивные мето-
ды УЗ контроля, осуществляющие адаптацию зондирующих сигналов под параметры АР и
характеристики контролируемого изделия, а также создавать соответствующее оборудование и
специализированное программное обеспечение (ПО), с помощью которого осуществляется
построение томограмм изделий.
РАЗРАБОТКА АДАПТИВНЫХ МЕТОДОВ УЗ ТОМОГРАФИИ ИЗДЕЛИЙ
С НЕСТАНДАРТНОЙ КОНФИГУРАЦИЕЙ
В основу разработки адаптивных методов УЗ контроля нами был положен метод адаптации
зондирующего сигнала, используемый при безэталонном определении одновременно скорости
ультразвука в бетоне и координат дефекта в изделии. В последние годы проблемам безэталон-
ного контроля изделий уделяется много внимания
[13, 14], в нашем случае для безэталонной
томографии использовался алгоритм «фокусировка в точку» [7], с помощью которого осущест-
влялось зондирование бетонного плоскопараллельного блока толщиной Н = 400 мм с отверстием
диаметром 40 мм на глубине h = 200 мм УЗ сигналами с фиксированной частотой f = 100кГц при
расположении АР непосредственно над дефектом. С помощью алгоритма «фокусировка в точку»
в вычислительном устройстве производилось построение большого количества трехмерных
томограмм (порядка k ≈ 102), построенных при различных значениях расчетной скорости Срасч.
Далее для всех построенных томограмм определялись амплитуды пиков и их координаты, а затем
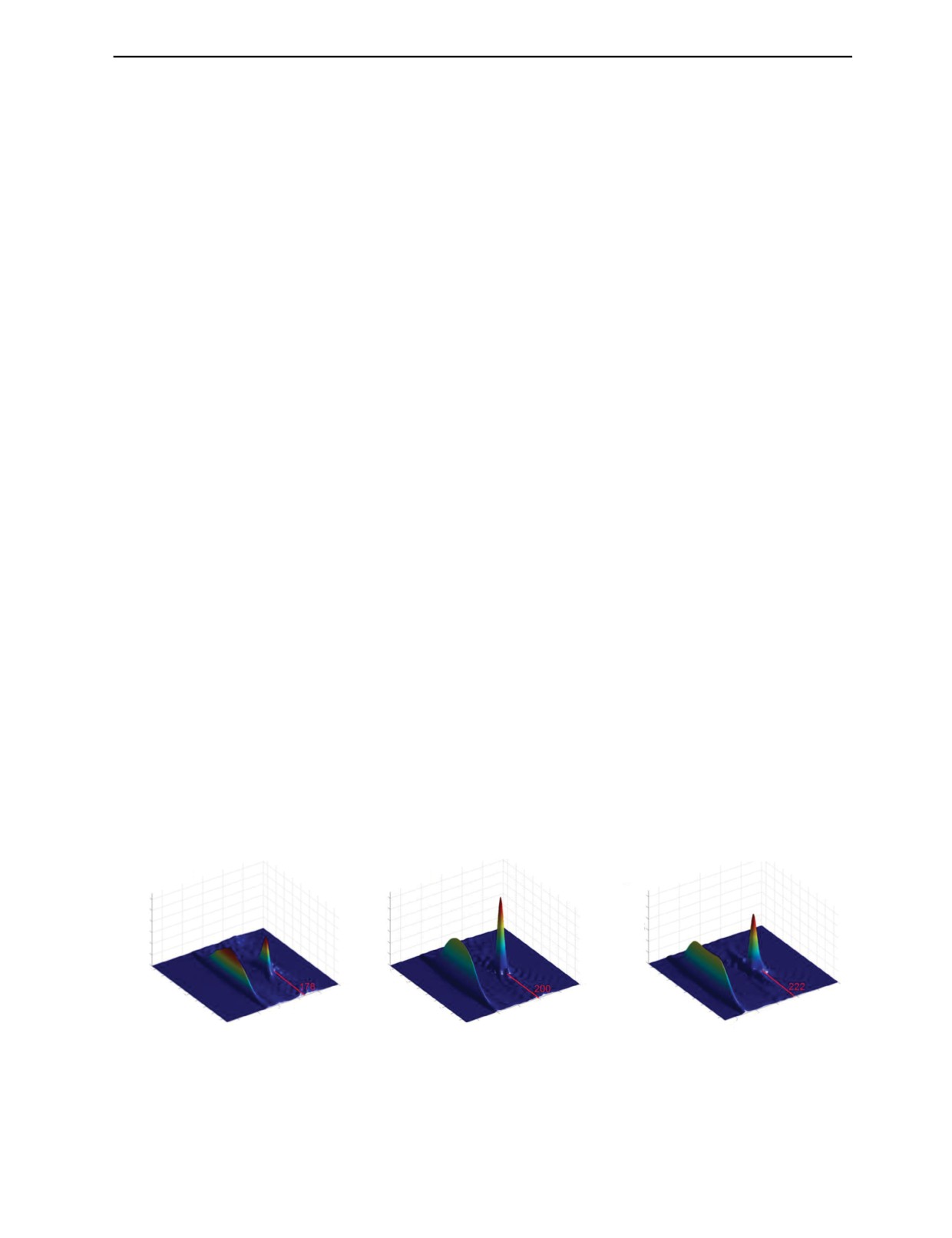
находилась томограмма с наибольшей амплитудой эхосигнала от дефекта UΣ. На рис. 2 показаны
а
б
в
UΣ, отн. ед.
UΣ, отн. ед.
UΣ, отн. ед.
1
1
1
0,5
0,5
0,5
0
0
0
-200
-200
-200
-100
-100
-100
0
0
0
0
100
0
100
0
100
X, мм
100
200
X, мм
100
200
X, мм
100
200
300
300
300
400
Y, мм
400
Y, мм
200
400
Y, мм
200
500
200
500
500
Рис. 2. Томограммы, представленные в виде графиков трехмерной поверхности, построенные при различных значениях
расчетной скорости акустических колебаний:
а — Срасч.а= 3500 м/с; б — Срасч.б= 4000 м/с; в — Срасч.в = 4500 м/с (моделирование).
Дефектоскопия
№ 12
2021
18
В.К. Качанов, И.В. Соколов, Р.В. Концов и др.
только три томограммы, построенные для разных значений расчетной скорости ультразвуковых
продольных волн Срасч.а = 3500 м/с (а); Срасч.б = 4000 м/с (б) и Срасч.в = 4500 м/с (в). На каждой из
томограмм четко виден пик UΣ, соответствующий точечному дефекту, при этом на томограмме,
показанной на рис. 2б, амплитуда пика максимальная. Поэтому по этой томограмме определялось
значение скорости УЗ волн в бетонном изделия С = 4000 м/с, а затем по этой же томограмме уста-
навливались координаты дефекта (h = 200 мм) [7].
Достоверность полученных значений скорости ультразвука и координат дефекта поясняет-
ся принципом формирования сигнала UΣ, который заключается в когерентном суммировании
парциальных эхосигналов, поступающих на все элементы антенны. При неизменной частоте
УЗ сигнала f и при использовании АР с неизменным шагом решетки d максимум просуммиро-
ванного сигнала определяется величиной скорости УЗ колебаний в бетоне C = λf. Это означа-
ет, что в данном примере именно при скорости ультразвука С = 4000 м/с возникают оптималь-
ные условия для синфазного сложения парциальных сигналов и, тем самым, для формирова-
ния максимальной амплитуды суммарного сигнала UΣ. При иных значениях скорости амплиту-
да эхо-сигнала от дефекта и координаты пика существенно изменяется: из томограмм на рис. 2
видно, что при отклонении скорости ультразвука в бетоне от реального значения С = 4000 м/с на
12 % координаты отверстия изменяются на 12 %, а амплитуда полезного сигнала уменьшается
на ≈ 6 дБ.
Достоинство рассмотренного адаптивного метода томографии заключается не только в воз-
можности безэталонного измерения одновременно скорости ультразвука и координат дефекта
при фиксированном шаге АР и при неизменной частоте зондирующего сигнала, но и в том, что
он позволяет производить адаптивную подстройку частоты сигнала в условиях структурного
шума и частотно-зависимого затухания ультразвука. Однако для реализации такого адаптивно-
го метода томографии необходима соответствующая аппаратура, позволяющая производить
подстройку частоты.
Тем самым, с помощью рассмотренного адаптивного безэталонного метода возможно произ-
водить адаптацию параметров контроля для поиска дефектов, расположенных в СК с нестан-
дартной конфигурацией, — определять скорость ультразвука или подбирать оптимальную часто-
ту зондирующего сигнала. Такая адаптация параметров сигнала (выбор оптимальной скорости
звука) была использована в УЗ томографе, предназначенном для обнаружения дефектов, распо-
ложенных в угловой зоне соединения двух стен [11] при использовании раздельно-совмещенной
«угловой» антенной (рис. 3а). В антенне использовались УЗ широкополосные ПЭП с сухим
точечным контактом, работающие на поперечных типах волн с центральной частотой 50 кГц.
Дефект представляет собой цилиндрическое отверстие диаметром 50 мм, расположенное вбли-
зи ребра двугранного угла на расстоянии 200 мм от каждой из стенок. На рис. 3б приведена
схема контроля углового соединения (а), при которой излучают и принимают эхосигналы обе
«половинки» угловой антенны. На рис. 3в показана томограмма угловой зоны двух стен, на кото-
рой четко фиксируется дефект, который не удается обнаружить при использовании стандартной
АР с плоской поверхностью.
а
б
в
0
100
200
300 X, мм
Рис. 3. Обнаружение дефекта в угловой зоне соединения двух стен с помощью угловой раздельной антенны:
а — угловая антенна для контроля изделий типа «внутренний угол»; б — схема контроля обеими «половинками» антенны;
в — двухмерная томограмма изделия [11].
Дефектоскопия
№ 12
2021
Ультразвуковой адаптивный томограф бетонных изделий ...
19
УЛЬТРАЗВУКОВАЯ АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ ТОМОГРАФИИ
СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ С НЕПЛОСКОЙ ПОВЕРХНОСТЬЮ
Так как при контроле СК с неплоской поверхностью невозможно использование традицион-
ной АР с плоской поверхностью, то нами была разработана УЗ адаптивная АР, форма которой
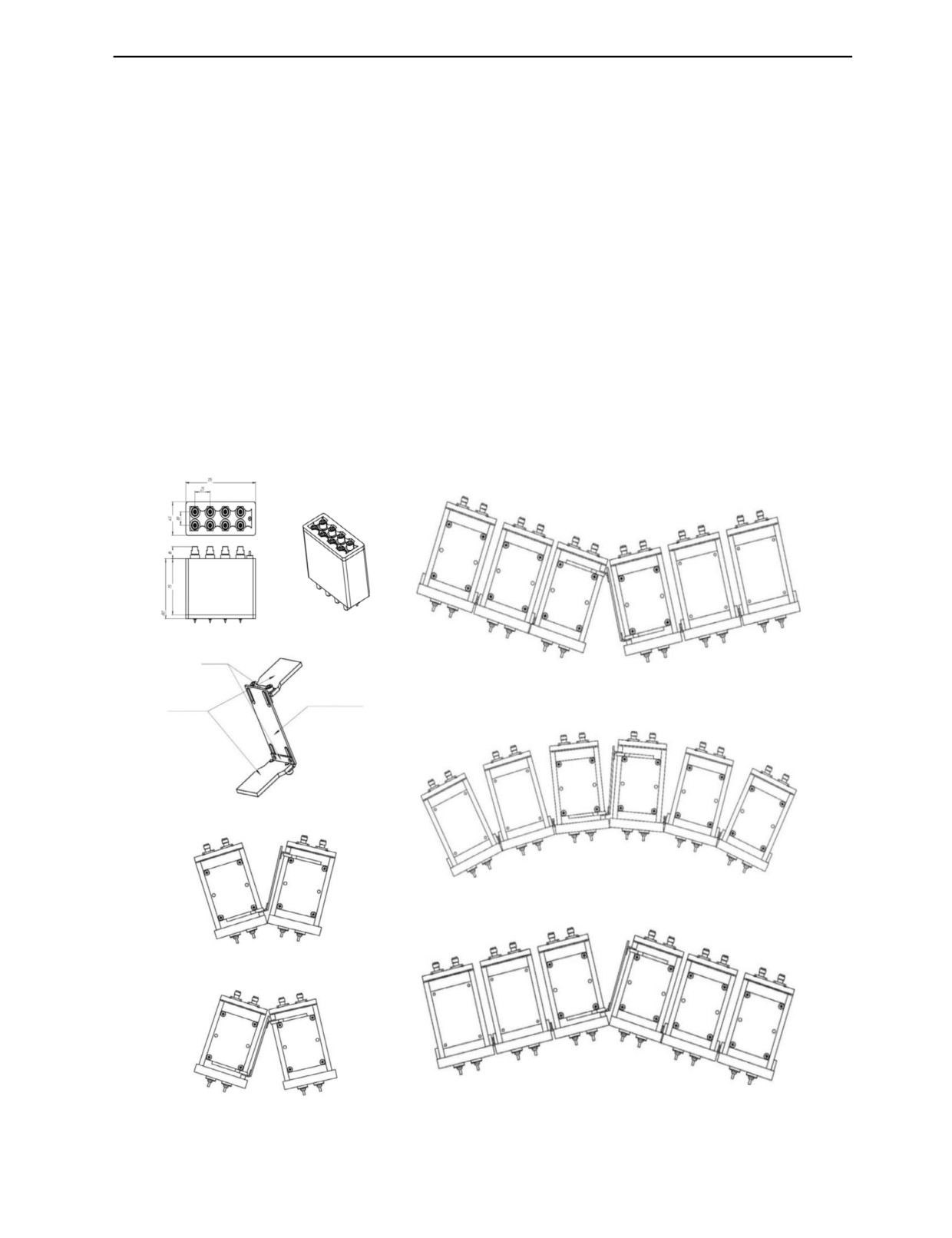
определяются формой поверхности СК. Адаптивная АР состоит из звеньев, показанных на
рис. 4а, каждое из которых состоит из двух элементов, а каждый элемент состоит из 4-х ПЭП с
сухим точечным контактом (СТК) [15]. Необходимость параллельного соединения 4-х ПЭП с
СТК вызвана необходимостью обеспечить должную ширину ДН звена в направлении, перпенди-
кулярном плоскости визуализации (плоскости сканирования). ПЭП с СТК работают на попереч-
ных типах волн с центральной частотой f0 = 50 кГц, которая определяет среднюю частоту зонди-
рующего широкополосного сигнала. Звенья АР соединяются гибкими шарнирами, они подвиж-
ны в двух осях (рис. 4б). Такое соединение позволяет обеспечить поворот блоков вокруг двух
осей и прижатие АР как к внешнему, так и к внутреннему углам СК.
На рис. 4в, г изображены возможные конфигурации подвижного соединения двух блоков АР
— угол раскрытия АР составляет до 120º как внутрь, так и наружу. На рис. 4д показаны простран-
ственные положения элементов АР, обеспечивающие прижатие АР к СК различной конфигурации.
Для обеспечения качественного прижатия АР к поверхности СК использовалась силиконовая про-
кладка. Каждое звено адаптивной АР в УЗ адаптивном томографе, изготовленном в ООО «КБ СА
Лагрон плюс», представляет собой отдельный модуль, содержащий усилитель, ЦАП и АЦП.
а
Петли
Промежуточная
Крепежная
пластина
пластина
б
в
Рис. 4. Элементы адаптивной антенной решетки:
а — звено АР с 8 ПЭП; б — элемент подвижного соединения звеньев; в, г — различные конфигурации подвижного блока
АР; д —различные конфигурации АР.
Дефектоскопия
№ 12
2021
20
В.К. Качанов, И.В. Соколов, Р.В. Концов и др.
б
в
а
г
д
Рис. 5. УЗ томография различных по форме СК:
а — с выпуклой; б — с цилиндрической поверхностью бетонного изделия; в — пневматический прижим АР УЗ томографа
к вертикальной стене; г — контроль СК с вогнутой поверхностью; д — контроль изделия из полимерных материалов.
В адаптивном томографе возможен как ручной прижим АР к неровной поверхности бетона, так
и автоматический прижим. Пример прижатия адаптивной АР в ручном режиме к поверхности СК
выпуклой и круглой формы показан на рис. 5а, б, г. Кроме того, имеется возможность пневмати-
ческого прижима адаптивной АР к вертикальным стенам (рис. 5в).
Адаптивная АР является неотъемлемой частью УЗ адаптивного томографа, созданного на базе
разработанного в МЭИ многофункционального измерительного комплекса (ИК) [16]. ИК состоит
из ПК, модулей ЦАП и АЦП, предназначенных для генерации и приема сигналов; усилителей
зондирующего и принятого сигналов; коммутатора, позволяющего проводить УЗ контроль изделий
в многоканальном режиме, а также контроллеров модулей АР. Также предусмотрена возможность
использования различных простых и сложно-модулированных сигналов, в том числе сигнала с
линейной частотной модуляцией (ЛЧМ сигнала), у которого оператор может изменять среднюю
частоту, девиацию частоты, длительность сигнала, подстраивая их значения под характеристики
преобразователей АР и ОК.
Настройка параметров зондирующего сигнала, хранение эхосигналов, их обработка и отобра-
жение результатов контроля осуществляется с помощью специализированного ПО через про-
граммный пользовательский интерфейс. В ПО также предусмотрен выбор возможной конфигура-
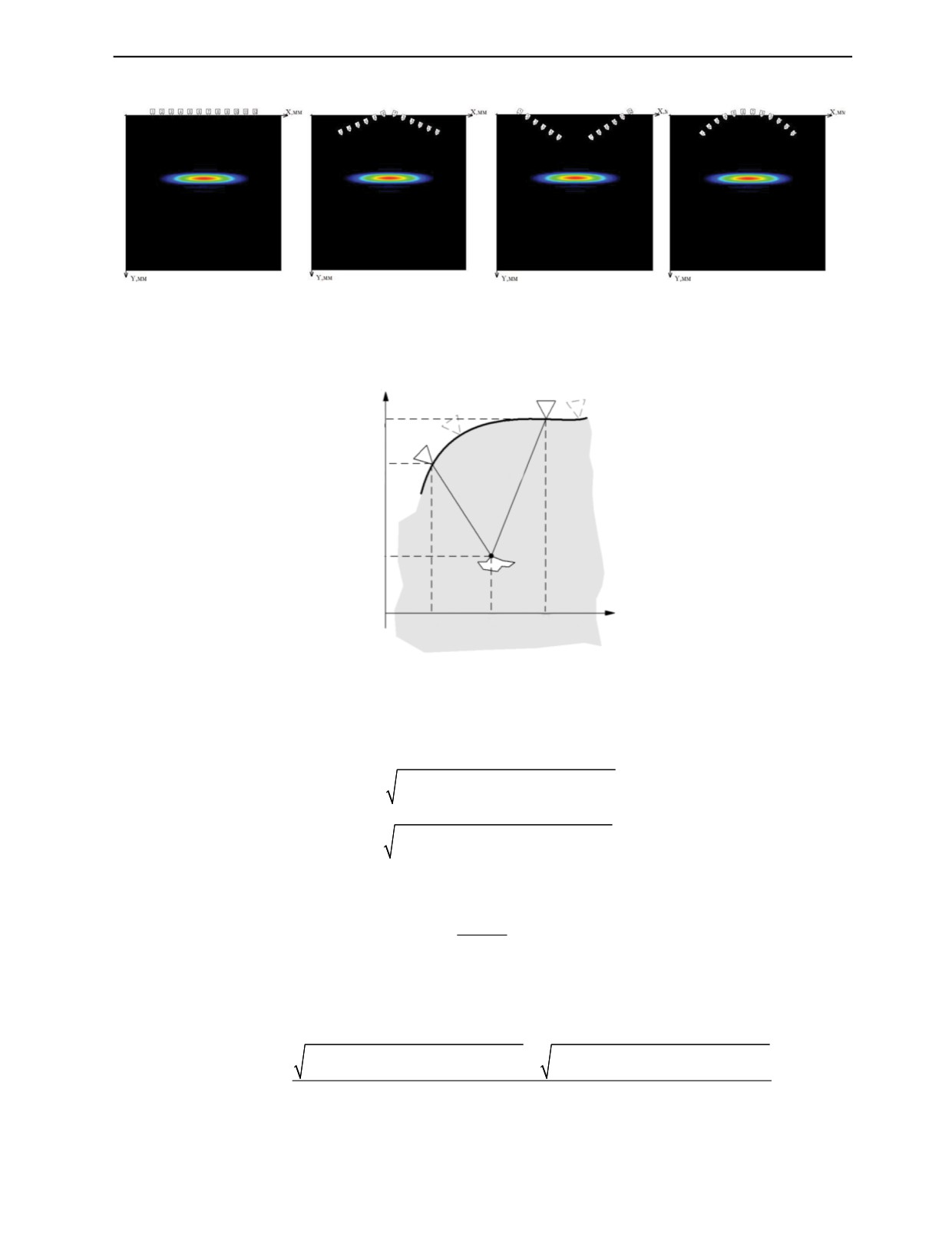
ции АР, соответствующей конфигурации поверхности контролируемых СК. На рис. 6 на фоне
томограмм изделия с изображением плоского дна ОК показаны некоторые из заложенных в ПО
наиболее типичные конфигурации адаптивной АР, соответствующих плоской (а), выпуклой (б),
вогнутой (в) и круглой (овальной) (г) поверхности ОК.
Так как конфигурация поверхности в процессе контроля может изменяться, то в ПО предусмо-
трена возможность подстройки конфигурации адаптивной АР под каждую новую поверхность.
При этом автоматически изменяются условия построения томограмм.
На рис. 7 показана схема для расчета томограммы изделия с произвольной поверхностью с
помощью алгоритма «фокусировка в точку». На этой схеме показаны излучающий ПЭП с поряд-
ковым номером n, который имеет координаты (xПЭП
, y
), а также один приемный ПЭП антенной
n
ПЭПn
решетки с номером m, который имеет координаты
(xПЭП
, yПЭП
). Дефект расположен в точке Di, j с
m
m
Дефектоскопия
№ 12
2021
Ультразвуковой адаптивный томограф бетонных изделий ...
21
а
б
в
г
Рис. 6. Выбор возможной конфигурации АР под форму поверхности СК.
y
ПЭПm
ПЭПm+1
ПЭПn+1
y ПЭП
m
ПЭПn
y ПЭП
n
L2
L1
y i, j
x
x ПЭП
x i, j
x ПЭП
n
m
Рис. 7. Принцип синтеза алгоритма «фокусировка в точку» для СК с произвольной поверхностью.
координатами Xi и Yj. Соответственно УЗ сигнал проходит путь от излучающего преобразователя
до дефекта L1 и путь от дефекта до приемного преобразователя L2:
2
2
L
=
(
x
-x
)
+
(
y
-y
)
,
(1)
1
Ï ÝÏ
n
i,
j
Ï ÝÏ
n
i,
j
2
2
L
=
(
x
-x
)
+
(
y
-y
)
(2)
2
Ï ÝÏ
m
i,
j
Ï ÝÏ
m
i,
j
Сумма путей LΣ= L1 + L2, отнесенная к скорости распространения УЗ колебаний С, позволяет
определять время прихода УЗ сигнала от предполагаемого отражателя в точке Di, j:
L
+
L
1
2
t
=
+
t
(3)
i,
j
çàä
C
Имея ансамбль сигналов, определяем амплитуду УЗ сигнала для каждой пары приемного и
передающего преобразователя для точки Di,
. Если в этой точке присутствует отражатель, то
j
суммарный сигнал от всех пар преобразователей после синфазного сложения будет иметь
амплитуду:
2
2
2
2
(
x
Ï ÝÏ
−
x
i,
j
)
+
(
y
Ï ÝÏ
−
y
i,
j
)
+
(
x
Ï ÝÏ
−
x
i,
j
)
+
(
y
Ï ÝÏ
−
y
i,
j
)
n
n
n
n
U
=
U
(4)
∑
i,
j
∑∑
m,n
n m
C
Если в точке Di, j дефект отсутствует, то суммарный сигнал в отсутствии шума равен нулю.
Дефектоскопия
№ 12
2021
22
В.К. Качанов, И.В. Соколов, Р.В. Концов и др.
РЕЗУЛЬТАТЫ ТОМОГРАФИИ ИЗДЕЛИЙ
С НЕСТАНДАРТНОЙ КОНФИГУРАЦИЕЙ ПОВЕРХНОСТИ
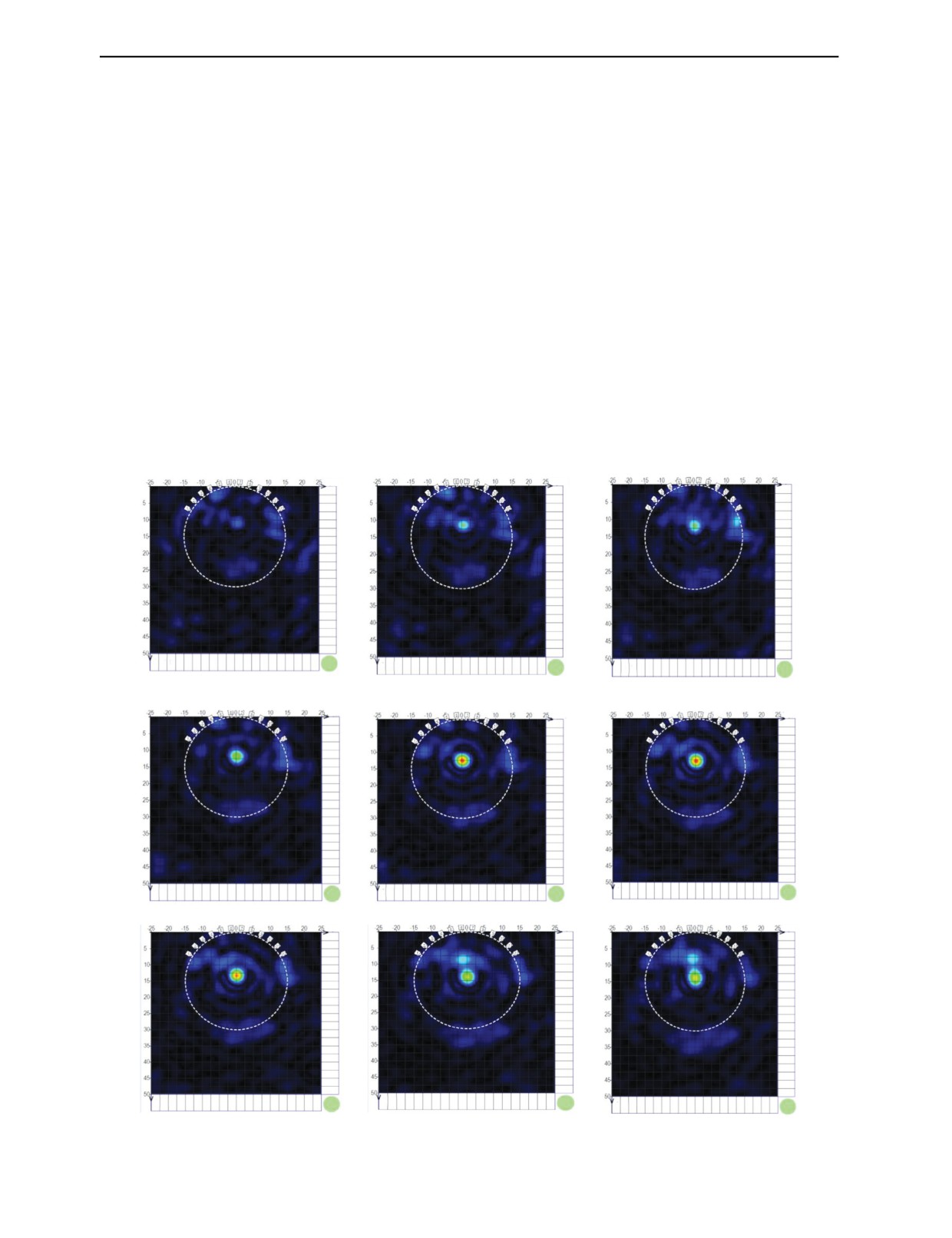
На рис. 8 приведены результаты томографии бетонного цилиндрического блока диаметром
300 мм с отверстием диаметром 50 мм, полученные с помощью УЗ томографа с адаптивной антен-
ной решеткой. Чтобы определить реальные координаты отверстия необходимо определить ско-
рость распространения УЗ волн в бетоне. Скорость поперечной волны, измеренная традиционным
способом по скорости поверхностной поперечной волны с горизонтальной поляризацией, соста-
вила Сt = 2000 м/с, однако на томограмме, построенной для этой скорости (рис. 8б), дефект выяв-
ляется недостаточно четко, а его координаты не соответствуют расположению отверстия в цилин-
дре. Для повышения точности определения координат дефекта был реализован безэталонный
способ определения скорости, основанный на использовании алгоритма «фокусировка в точку».
На рис. 8 приведены девять двухмерных томограмм цилиндрического изделия, полученные при
различных значениях расчетной скорости ультразвука. По этим двумерным томограммам доста-
точно сложно определить ту из них (рис. 8ж), при которой амплитуда эхосигнала от дефекта мак-
симальна. Поэтому истинная скорость ультразвука в бетонном изделии Сt ≈ 2400 м/с была опреде-
лена в автоматическом режиме по результатам построения трехмерных томограмм цилиндриче-
ского ОК в ИК. Также по трехмерной томограмме, построенной для скорости Сt ≈ 2400 м/с, были
определены координаты отверстия в цилиндрическом бетонном изделии.
а — Сt =1900 м/с
б — Сt =2000 м/с
в — Сt =2100 м/с
X, см
X, см
X, см
Y, см
Y, см
Y, см
г — Сt =2200 м/с
д — Сt =2300 м/с
е — Сt =2350 м/с
X, см
X, см
X, см
Y, см
Y, см
Y, см
ж — Сt =2400 м/с
з — Сt =2500 м/с
и — Сt =2600 м/с
X, см
X, см
X, см
Y, см
Y, см
Y, см
Рис. 8. Томограммы СК, полученные при различных значениях расчетной скорости УЗК.
Дефектоскопия
№ 12
2021
Ультразвуковой адаптивный томограф бетонных изделий ...
23
а
б
X, см
X, см
Y, см
Y, см
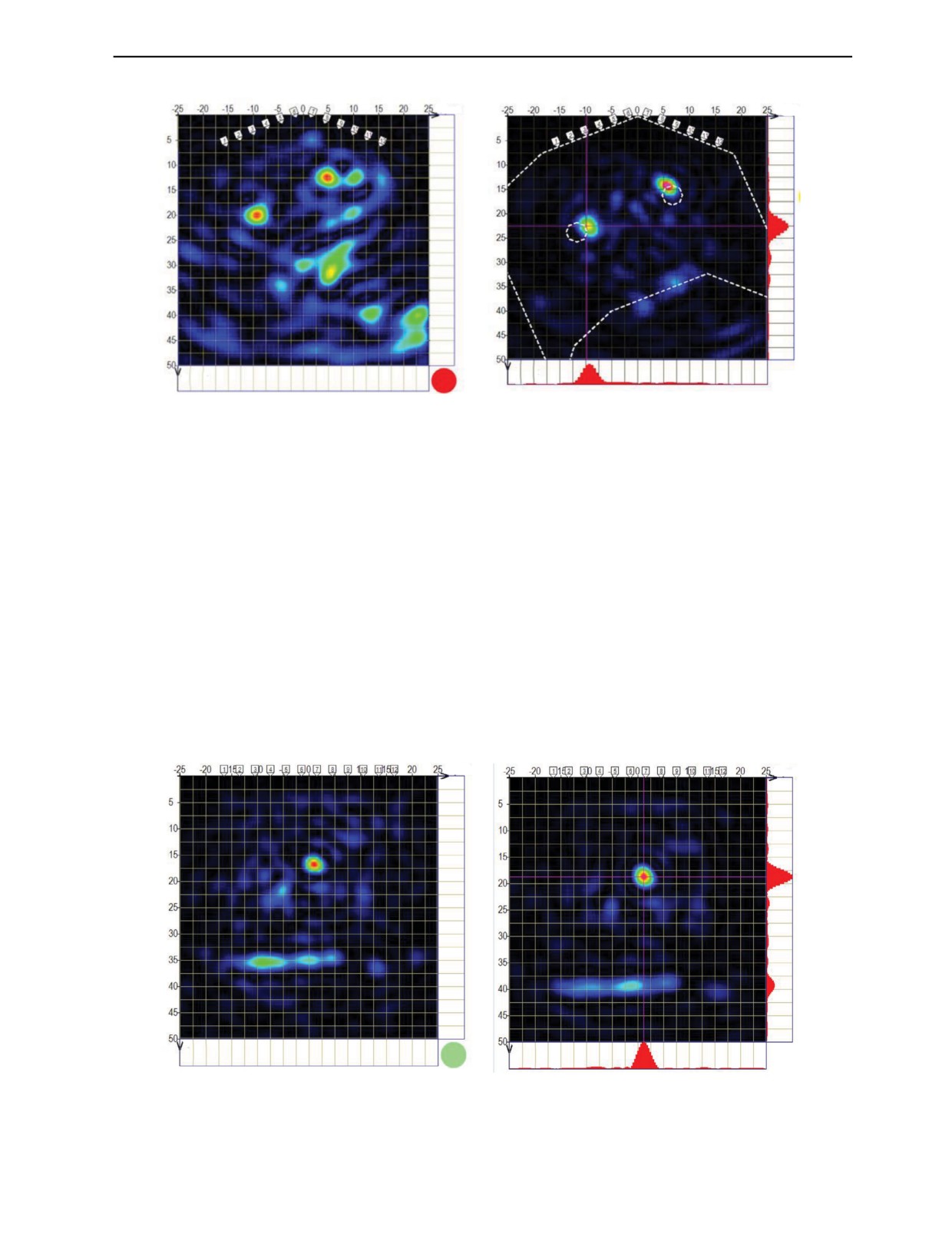
Рис. 9. Результат контроля бетонного ОК с неплоской (выпуклой) поверхностью:
а — томограмма, полученная с использованием измеренного значения скорости поверхностной волны; б — томограмма, построенная
с использованием значения скорости Сt ≈ 2400 м/с, измеренной с помощью алгоритма «фокусировка в точку».
Аналогичным образом были проконтролированы изделия с иными формами поверхности.
Так, на рис. 9а показаны результаты контроля изображенного на рис. 5а бетонного блока с
«внешним углом», в котором имеются два цилиндрических отверстия диаметром 40 мм. Для
этого программным путем задавалась одна из предусмотренных в ПО конфигураций антенны,
соответствующая «выпуклой поверхности» (см. рис. 6б). Затем определялась скорость ультра-
звука в бетоне. Вначале производилось измерение скорости поперечных волн по скорости
поверхностной волны, однако измеренная таким традиционным способом скорость ультразвука
привела к ложным результатам (рис. 9а). Использование безэталонного способа измерения ско-
рости УЗ колебаний с помощью алгоритма «фокусировка в точку» позволило получить изобра-
жение бетонного изделия с нестандартной поверхностью, которое адекватно отображает его
структуру: местоположение границы раздела сред цилиндрических отверстий соответствует их
положению в бетонном изделии (рис. 9б).
а
б
X, см
X, см
Y, см
Y, см
Рис. 10. Томограммы СК с плоской поверхностью толщиной 400 мм с отверстием, расположенным на глубине h = 200 мм,
построенные при значении скорости поверхностной поперечной волны Сt1 = 1550 м/с, измеренной традиционным
методом (а), и скорости поверхностной волны Сt2 = 1750 м/с, измеренной с помощью алгоритма «фокусировка в точку» (б).
Дефектоскопия
№ 12
2021
24
В.К. Качанов, И.В. Соколов, Р.В. Концов и др.
На рис. 10а показан результаты томографии ОК с плоской поверхностью (стены, изображен-
ной на рис. 5в) толщиной Н = 400 мм с дефектом (цилиндрическим отверстием диаметром
50 мм), расположенным на глубине h = 200 мм. Сначала для построения томограммы использо-
валось значение измеренной традиционным способом скорости поверхностной поперечной
волны Сt1 = 1550 м/с. На томограмме, показанной на рис. 10а, видны дефект (h1 ≈ 160 мм) и
донная поверхность (Н1 = 362 мм), координаты которых отличаются от известных заранее значе-
ний (погрешность измерения составила 9,5 %). На следующем этапе скорость УЗ колебаний в
бетоне была определена с помощью алгоритма «фокусировка в точку»: Сt2 = 1750 м/с. На томо-
грамме (рис. 10б), построенной при этой скорости ультразвука, дефект расположен на расстоя-
нии h2 ≈ 190 мм, донная поверхность располагается на расстоянии Н2 = 395 мм (погрешность
составила ≈ 1,3 %). Таким образом, результаты экспериментов по определению скорости ультра-
звука подтверждают высокую точность и надежность безэталонного способа измерения скоро-
сти ультразвука в бетоне, основанного на использовании алгоритма обработки сигналов УЗ
антенной решетки «фокусировка в точку».
ЗАКЛЮЧЕНИЕ
Большинство приборов УЗ контроля используют проверенные и одновременно простые
методы контроля, в которых практически не применяется сложная радиотехническая обработ-
ка сигналов. Вместе с тем, современная электронная база позволяет создавать достаточно
дешевые, надежные устройства, с помощю которых возможно реализовывать многочисленные
алгоритмы обработки сигналов, позволяющие повысить качество контроля изделий. Пример
тому — УЗ адаптивный томограф, в котором наряду с использованием адаптивной антенны
осуществляется безэталонный способ измерения скорости распространения ультразвука и
одновременно координат дефектов и габаритов изделия, а также производится адаптация пара-
метров зондирующих сигналов с целью контроля разнообразных изделий с нестандартной
конфигурацией поверхности.
Работа выполнена при поддержке Министерства науки и высшего образования Российской
Федерации в рамках гранта Президента Российской Федерации для государственной поддержки
молодых российских ученых — кандидатов наук № MK-1523.2020.8.
СПИСОК ЛИТЕРАТУРЫ
1. Неразрушающий контроль / Справочник. В 7 т. Под общей редакцией В.В. Клюева. Т. 3:
Ультразвуковой контроль. Ермолов И.Н., Ланге Ю.В. М.: Машиностроение, 2004. 864 с.
2. Jansohn R., Schickert M. Objective Interpretation of Ultrasonic Concrete Image // NDT.net. December
3. Samokrutov A.A., Kozlov V.N., Shevaldykin V.G. Ultrasonic testing of concrete objects using dry acoustic
contact. Methods, instruments and possibilities / The 5th International Conference on Non-Destructive Testing
and Technical Diagnostics in Industry, Moscow, Russia. 2006. V. 152.
4. Schickert M., Krause M. Ultrasonic Techniques for Evaluation of Reinforced Concrete Structures /
In: C. Maierhofer, H.-W. Reinhardt, G. Dobmann (Eds.). Non-destructive Evaluation of Reinforced
Concrete Structures. V. 2. Non-destructive Testing Methods. Cambridge: Woodhead, 2010. P. 490—530.
5. Paris O., Brédif Ph., Roy O. Study of phased array techniques for cracks characterization in concrete
structures / International Symposium Non Destructive Testing in Civil Engineering (NDT-CE) 411—148
September 2003.
6. Mielentz F. Phased Arrays for Ultrasonic Investigations in Concrete Components // J. Nondestruct. Eval.
2008. V. 27. P. 23—33. DOI: org/10.1007/s10921-008-0032-6
7. Kachanov V.K., Sokolov I.V. , Kontsov R.V. et al. Using «Focusing to a Point» Algorithm for Reference-
Free Measurement of the Speed of Ultrasound in Tomography of Concrete Engineering Structures // Russian
Journal of Nondestructive Testing. 2019. V. 55. No. 6. P. 443—452. [Качанов В.К., Соколов И.В.,
Концов Р.В., Тимофеев Д.В. Использование алгоритма «фокусировка в точку» для безэталонного изме-
рения скорости ультразвука при томографии строительных конструкций из бетона // Дефектоскопия.
2019. № 6. С. 20—29.]
8. Введение в технологию применения ультразвуковых фазированных антенных решеток / Перевод:
к.т.н. С.В. Реука. СПб.: СПбГЭТУ ЛЭТИ, 2011. 210 с.
9. Кондратенков Г.С., Потехин В.А., Реутов А.П., Феоктистов Ю.А. Радиолокационные станции
обзора Земли. М.: Радио и связь, 1983.
Дефектоскопия
№ 12
2021
Ультразвуковой адаптивный томограф бетонных изделий ...
25
11. Kachanov V.K., Kartashev V.G., Sokolov I.V. Ultrasonic Tomograph of Concrete Building Structures
with Lateral Signal Radiation
//
Russian Journal of Nondestructive Testing.
2020.
V. 56. No. 2. P. 110—118. [Качанов В.К., Карташев В.Г., Соколов И.В., Концов Р.В., Трунов Э.И.
Ультразвуковой томограф бетонных строительных конструкций с боковым излучением сигнала //
Дефектоскопия. 2020. № 2. C. 12—20.]
12. Качанов В.К., Соколов И.В., Тимофеев Д.В., Туркин М.В., Шалимова Е.В. Обнаружение отража-
ющих плоскостей при ультразвуковой томографии строительных конструкций из бетона
//
Дефектоскопия. 2010. № 5. С. 36—44.
13. Шевалдыкин В.Г. О безэталонном измерении толщины изделий с переменной по глубине скоро-
сти звука // Дефектоскопия. 1986. № 3. С. 20—22.
14. Качанов В.К., Соколов И.В., Концов Р.В., Синицын А.А. Использование антенных решеток для
безэталонного измерения скорости ультразвука и толщины бетонных изделий // Дефектоскопия. 2017.
№ 1. С. 26—33.
15. Шевалдыкин В.Г., Самокрутов А.А., Козлов В.Н. Ультразвуковые низкочастотные пьезопреобра-
зователи с сухим точечным контактом и их применение для неразрушающего контроля // Контроль.
Диагностика. 2003. № 2. C. 30—39.
16. Качанов В.К., Карташев В.Г., Соколов И.В., Концов Р.В., Федоров М.Б. Ультразвуковая адаптив-
ная многофункциональная дефектоскопия. М.: Издательский дом МЭИ, 2015. 175с.
Дефектоскопия
№ 12
2021