УДК 620.179.14
МЕТОДИКА ПРАКТИЧЕСКОГО ВОССТАНОВЛЕНИЯ ПАРАМЕТРОВ ФОРМЫ
ПОВЕРХНОСТНЫХ ДВУХМЕРНЫХ ДЕФЕКТОВ С УЧЕТОМ
НЕЛИНЕЙНЫХ СВОЙСТВ ФЕРРОМАГНЕТИКА
© 2021 г. А.В. Никитин1,*, А.В. Михайлов1,**, А.С. Петров1,***, С.Э. Попов1,****,
Ю.Л. Гобов1,*****
1Институт физики металлов им. М.Н. Михеева УрО РАН, Россия 620108 Екатеринбург, ул. С. Ковалевской, 18
E-mail: *an@imp.uran.ru; **mikhaylov@imp.uran.ru; ***alex.s.petrov@rambler.ru;
****sergeyeduardovichpopov@gmail.com; *****go@imp.uran.ru
Поступила в редакцию 30.09.2021; после доработки 29.10.2021
Принята к публикации 29.10.2021
Представлена устойчивая к ошибкам входных данных методика определения значений глубины и раскрытия
поверхностного двухмерного дефекта в ферромагнетике. Дефекты и магнитные преобразователи находятся на разных
сторонах металлической пластины. Учтены нелинейные свойства ферромагнетика. Компоненты магнитного поля в
металле восстанавливались по измеренным компонентам магнитного поля над бездефектной поверхностью металла.
В результате проведения численных экспериментов были получены границы применимости методики. Результаты мето-
дики проверены на эксперименте.
Ключевые слова: обратная геометрическая задача магнитостатики, дефектометрия, потеря сплошности металла,
магнитное поле рассеяния дефекта, внутритрубные снаряды, дефектометрия бурильных труб магнитным методом.
DOI: 10.31857/S0130308221120058
ВВЕДЕНИЕ
Конфигурация, при которой поверхностные дефекты потери сплошности металла и магнитные
преобразователи расположены на противоположных сторонах металлической пластины, характер-
на для многих отраслей промышленности и транспорта, в частности для магнитного контроля труб
магистральных трубопроводов, а также для контроля бурильных труб непосредственно на буровых.
В первом случае, система магнитных преобразователей перемещается внутри трубы, а дефекты в
таких трубах располагаются на внешней поверхности стенки трубы. Во втором случае, система
преобразователей перемещается по внешней поверхности бурильной трубы, а дефекты, вызванные
воздействием бурового раствора, располагаются на внутренней поверхности стенки трубы.
Из-за нелинейного отклика ферромагнетика на внешнее магнитное поле восстановление гео-
метрии поверхностного дефекта по компонентам магнитного поля, измеренным на определенном
уровне над бездефектной металлической поверхностью, является сложной задачей.
Так, с одной стороны, до сих пор не удается восстановить геометрию поверхностного дефекта
потери сплошности металла произвольной формы в трехмерном случае, используя информацию,
полученную путем решения прямой задачи: путем получения полей от множества различных де-
фектов (математическое моделирование, эксперимент) и их сравнения с исследуемым полем [1—4].
А с другой стороны, работы по решению обратной задачи магнитостатики ограничиваются ли-
нейным (т.е. предполагается, что магнитная индукция ферромагнетика линейно зависит от напря-
женности магнитного поля) и двухмерным случаем [5—8].
В работе [7] представлено решение обратной геометрической задачи магнитостатики без ис-
пользования априорной информации. Однако задача была решена только для двухмерного случая
и с учетом линейной зависимости индукции магнитного поля от напряженности магнитного поля,
кроме того, магнитные преобразователи были расположены непосредственно над дефектной по-
верхностью металла.
В работах [9, 10] была приближенно решена задача восстановления геометрии поверхностного
дефекта произвольной формы в магнитомягких ферромагнетиках в двухмерном линейном и трех-
мерном случае с учетом нелинейных свойств ферромагнетика. В обоих случаях поле было измерено
(результат решения прямой задачи в пакетах FEMM, ELMER соответственно) над несодержащей де-
фект поверхностью металла. Используемое в [9, 10] приближение можно описать следующим обра-
зом. В магнитомягких материалах выход магнитного потока из ферромагнетика даже в зоне дефекта
(плавного дефекта произвольной формы) составляет всего несколько процентов. Следовательно, вос-
станавливая стационарное магнитное поле с «верхней» бездефектной поверхности пластины фер-
ромагнетика на «нижнюю» поверхность, которая содержит дефект, и даже ниже, предполагаем, что
Методика практического восстановления параметров формы ...
47
всюду внизу находится металл. В результате, можно построить две силовые линии, одна проходит
по «верхней» бездефектной поверхности металла, другая начинается в бездефектной зоне «слева»
на «нижней» поверхности, проходит через дефект и заканчивается в бездефектной зоне «справа» на
«нижней» поверхности металла. Поток магнитной индукции через поверхность между двумя сило-
выми линиями постоянен. Если пренебречь потерей нескольких процентов потока в зоне дефекта, то
мы получим силовую линию, приближенно описывающую форму дефекта на нижней поверхности,
поскольку она соответствует начальным условиям задачи — значениям компонент магнитного поля,
измеренным в результате численного и реального экспериментов. Стоит отметить, что трубы для ма-
гистральных газопроводов и бурильные трубы изготавливаются из магнитомягких ферромагнетиков.
Поверхностный двухмерный дефект в настоящей работе — это дефект, у которого ширина
уменьшается с глубиной, а форма дефекта описывается функцией, имеющей ограниченную произ-
водную по х в каждой точке (правый дефект на рис. 1). Либо это дефект-пропил, имеющий форму
прямоугольника (рис. 8), но при этом глубина не превышает раскрытие.
Область применения данного метода исследована численными экспериментами в заключитель-
ной части статьи. Данным методом невозможно восстановить геометрическую форму трещин и тре-
щиноподобных дефектов, у которых глубина как минимум в 10 раз превышает раскрытие. Определе-
ние дефектов потери сплошности, а также трещин и трещиноподобных дефектов дано в [12].
Настоящая статья по последовательности изложения состоит из четырех частей.
В первой части показан алгоритм повышения устойчивости построения силовой линии в двух-
мерном нелинейном случае при добавлении однородного шума во входные данные (добавлении
ошибки во входные данные), что позволяет использовать настоящую методику при обработке экс-
периментальных данных. В первой части двухмерные электромагнитные поля, необходимые для
получения данных измерений, рассчитываются в пакете программ FEMM, где в исследуемой об-
ласти, содержащей ферромагнетик и «воздух», решается прямая задача. Магнитное поле задается
разностью магнитных потенциалов на верхней и нижней границе исследуемой области. На правой
и левой границах этой области тангенциальные составляющие компонент напряженности магнит-
ного поля равны нулю. Форма исследованного дефекта показан на рис. 7.
Во второй части, в пакете программ ELMER, позволяющем решать прямую задачу —
рассчитать трехмерные электромагнитные поля в исследуемом пространстве, содержащем «воз-
дух», ферромагнетик и провода с током, моделируется эксперимент. Следует сказать, что выбор
модели двухмерного дефекта определяется тем, что реальный трехмерный дефект сильно вытянут
в поперечном направлении к направлению внешнего приложенного поля. В некоторой, достаточ-
но удаленной от краев дефекта области в плоскости XY (рис. 4—6) получаются условия двухмер-
ности (Hy = const), где можно применить алгоритм вычисления координат магнитной силовой
линии, описанный в части1.
В третьей части описывается экспериментальная установка и приводятся результаты эксперимента.
В четвертой части путем численных экспериментов в пакете программ FEMM исследована об-
ласть применимости методики.
Часть 1
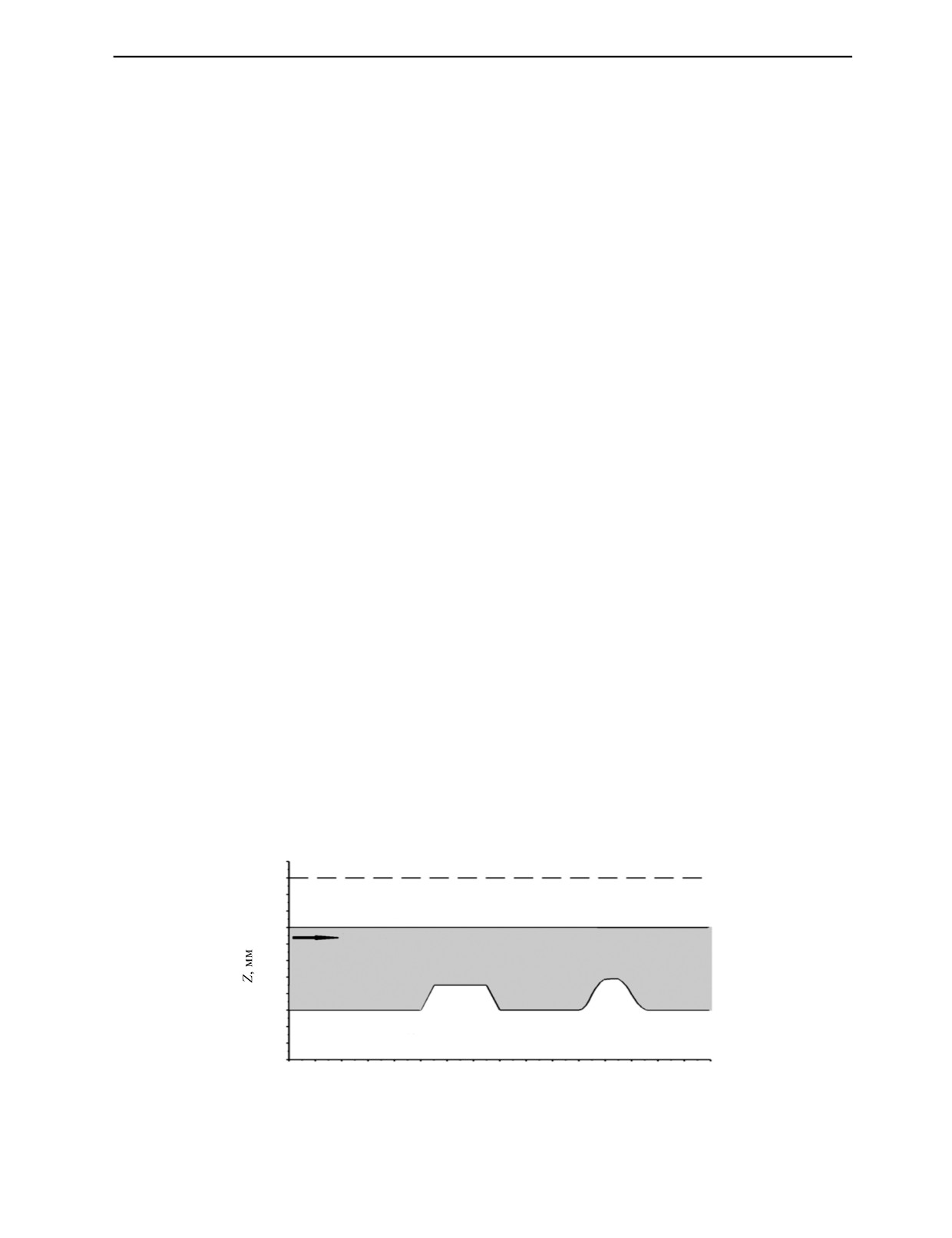
ГЕОМЕТРИЯ ЗАДАЧИ
8
Zm
6
4
Воздух
μ = 1
2
0
Hвнешнее
-2
-4
μ(H)
Ферромагнетик
-6
-8
-10
-12
Воздух
-14
-16
-80 -70 -60 -50 -40 -30 -20 -10
0
10
20
30
40
50
60
70
80
X, мм
Рис. 1. Измерения проводятся на уровне Zm над бездефектной поверхностью металлической пластины. Показано направ-
ление приложенного внешнего стационарного магнитного поля, μ — относительная магнитная проницаемость магнито-
мягкого ферромагнетика.
Дефектоскопия
№ 12
2021
48
А.В. Никитин, А.В. Михайлов, А.С. Петров и др.
ПЕРЕСЧЕТ ЗНАЧЕНИЙ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ С УРОВНЯ ИЗМЕРЕНИЯ
НА УРОВЕНЬ ГРАНИЦЫ РАЗДЕЛА МЕТАЛЛ—ВОЗДУХ СО СТОРОНЫ МЕТАЛЛА
По измеренным значениям компонент магнитного поля в воздухе можно восстановить магнит-
ное поле до границы с металлом, например, следующим образом. Перепишем уравнения Максвел-
ла для случая магнитостатики в виде начальной задачи Коши и решим ее в конечных разностях (то
же самое будем делать и в металле). Начальными условиями будут полученные значения компо-
нент магнитного поля и их производных по оси абсцисс на уровне измерения Zm. Эта процедура
описана в [9, 10] и далее (для вычисления поля в металле) процедура будет подробно описана еще
раз, поэтому мы опускаем здесь ее описание. В результате получаем значения компонент магнит-
ного поля на уровне z = +0 (граница воздух—металл со стороны воздуха).
Далее, используя выражения для сопряжения на границе раздела двух сред (непрерывность
тангенциальной составляющей напряженности магнитного поля и нормальной составляющей маг-
нитной индукции), мы пересчитываем значения составляющих магнитного поля с уровня z = +0 на
уровень z = -0 уровень (граница раздела воздух—металл со стороны металла). Эти значения будут
начальными условиями задачи Коши в металле. Зная значения составляющих напряженности маг-
нитного поля и магнитной индукции, можно вычислить значения их производных по оси абсцисс
на уровне z = -0.
ВЫЧИСЛЕНИЕ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ В МЕТАЛЛЕ
Запишем уравнения Максвелла для случая магнитостатики вместе с материальным уравнением:
div B = 0;
rot H = 0;
(1)
B = μ(|H|)× H,
где B и H — векторы магнитной индукции и напряженности магнитного поля соответственно, а
2
H
=
(
H
)
+
(
H
)
2.
x
z
В качестве зависимости μ(H) возьмем известную зависимость μ(H) для стали 20.
Перепишем систему уравнений (1) в векторных компонентах:
∂B
z
−∂B
=
x ;
∂z
∂x
∂H
∂H
x
=
z ;
∂
z
∂x
(2)
2
2
B
=µ
(
H
)
+
(
H
)
⋅ H
,
z
(
x
z
)
z
2
2
B
=µ
(
H
)
+
(
H
)
⋅
H
x
(
x
z
)
x
Система
(2) состоит из
4-х уравнений и содержит
4 неизвестных: Hx, Hz, Bx, Bz.
Перепишем систему уравнений (2) в конечных разностях в форме начальной задачи Коши. Учтем
отрицательный знак перед Δz — ось OZ направлена «вверх», а пересчитываем мы поле «вниз»
(см. рис.1):
∆
⋅ dB
z
x
B
(
x,Z
−∆
)
=
B
(
x
,Z
)
+
;
(3)
z
0
z
z
0
dx
∆
⋅dH
z
z
(4)
H
(
x,Z
−∆
)
=
H
(
x
,Z
)
−
;
x
0
z
x
0
dx
2
2
B
(
x,Z
− ∆z
)
=µ
H
(
x,Z
−∆
)
+H
(
x
,Z
−∆
)
⋅H
(
x,Z
−∆
)
,
(5)
z
0
(
x
0
z
z
0
z
)
z
0
z
Дефектоскопия
№ 12
2021
Методика практического восстановления параметров формы ...
49
2
2
B
(
x,Z
− ∆z
)
=µ
H
(
x,Z
−∆
)
+H
(
x,Z
−∆
)
⋅H
(
x,Z
−∆
)
,
(6)
x
0
(
x
0
z
z
0
z
)
x
0
z
Z0 — указывает уровень границы раздела металл—воздух со стороны металла.
Рассмотрим систему уравнений (3)—(6). Уравнения (3) и (4) позволяют пересчитать значения
Hx и Bz на уровне Z0 - Δz. Из уравнения (5) можем определить значение функции Hz(x, Z0-Δz), после
получения которого можно вычислить Bx(x, Z0-Δz), используя (6). Повторяя эту процедуру, можно
шаг за шагом восстанавливать составляющие магнитного поля на «нижнюю» поверхность пласти-
ны, которая содержит дефект. Каждый раз мы предполагаем, что всюду ниже у нас металл.
СПОСОБЫ ПОСТРОЕНИЯ МАГНИТНОЙ ЛИНИИ
Восстановив компоненты магнитного поля в металлической пластине, для построения силовой
dx dz
линии магнитного поля в [9, 10] решалось следующее дифференциальное уравнение
=
H
H
x
z
Полученная таким образом магнитная линия хорошо описывает форму плавного поверхностн
о-
го дефекта [9, 10], но неустойчива к шумам во входных данных, и уже 1-2 % однородного шума
в начальных значениях компонент магнитного поля делают невозможным построение магнитной
линии на нижней поверхности пластины.
Силовую линию магнитного поля можно построить и другим способом. Используем метод наи-
меньших квадратов (МНК). Разобьем область металла линиями, параллельными осям OX и OZ.
Пересечения линий будут узлами такой сетки. Запишем для узлов сетки:
2
H
dZ
z
−
→
min,
H
dx
x
где Z — это z-координаты точек силовой магнитной линии в металле.
dZ
В конечных разностях можно заменить производную
произведением двух матриц: Ak,l × Zl,
dx
где матрица
 — ленточная матрица. Матрица
 имеет следующий вид:
−1
1
…. первая строка;
0
0
0
0
0
0
0
0
∆
∆
-1
1
…. вторая строка;
0
0
0
0
0
0
0
0
∆
∆
-1
1
0
0
0
0
0
0
0
0
…. третья строка, Δ— шаг по оси х.
∆
∆
………………………………………
Запишем для узлов сетки (i, j):
R
=H
/
H
Тогда задачу МНК в матричной форме можно
i,
j
z
i,
j
x
i,
j
переписать как
R
-A
×Z
→
min,
(7)
(
)2
стандартным решением для (4) будет
−
T
Z
=
R
×
A×
(
A ×A
,
где AT — транспонированная матрица.
Такой способ построения магнитной линии значительно экономит компьютерное время и бо-
лее устойчив к шумам во входных данных задачи. В дальнейшем, для восстановления геометрии
поверхностного дефекта мы будем использовать магнитную линию, полученную этим методом.
Дефектоскопия
№ 12
2021
50
А.В. Никитин, А.В. Михайлов, А.С. Петров и др.
РЕГУЛЯРИЗАЦИЯ ПРОИЗВОДНЫХ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ПО ОСИ
АБСЦИСС
В процессе численного пересчета компонент магнитного поля с одного уровня на другой в
сторону источника, вследствии ошибок во входных данных, производные компонент магнитно-
го поля могут перестать быть непрерывными функциями от ординаты. Чтобы справиться с этим,
предложен следующий метод. В уравнениях (3) и (4) можно образы Фурье производных dBx/dx и
dHz/dx умножить на коэффициент регуляризации, равный, например, 1/ (1 + α · ω2), где параметр α
выбирается численным экспериментом, а ω — переменная образа Фурье [11].
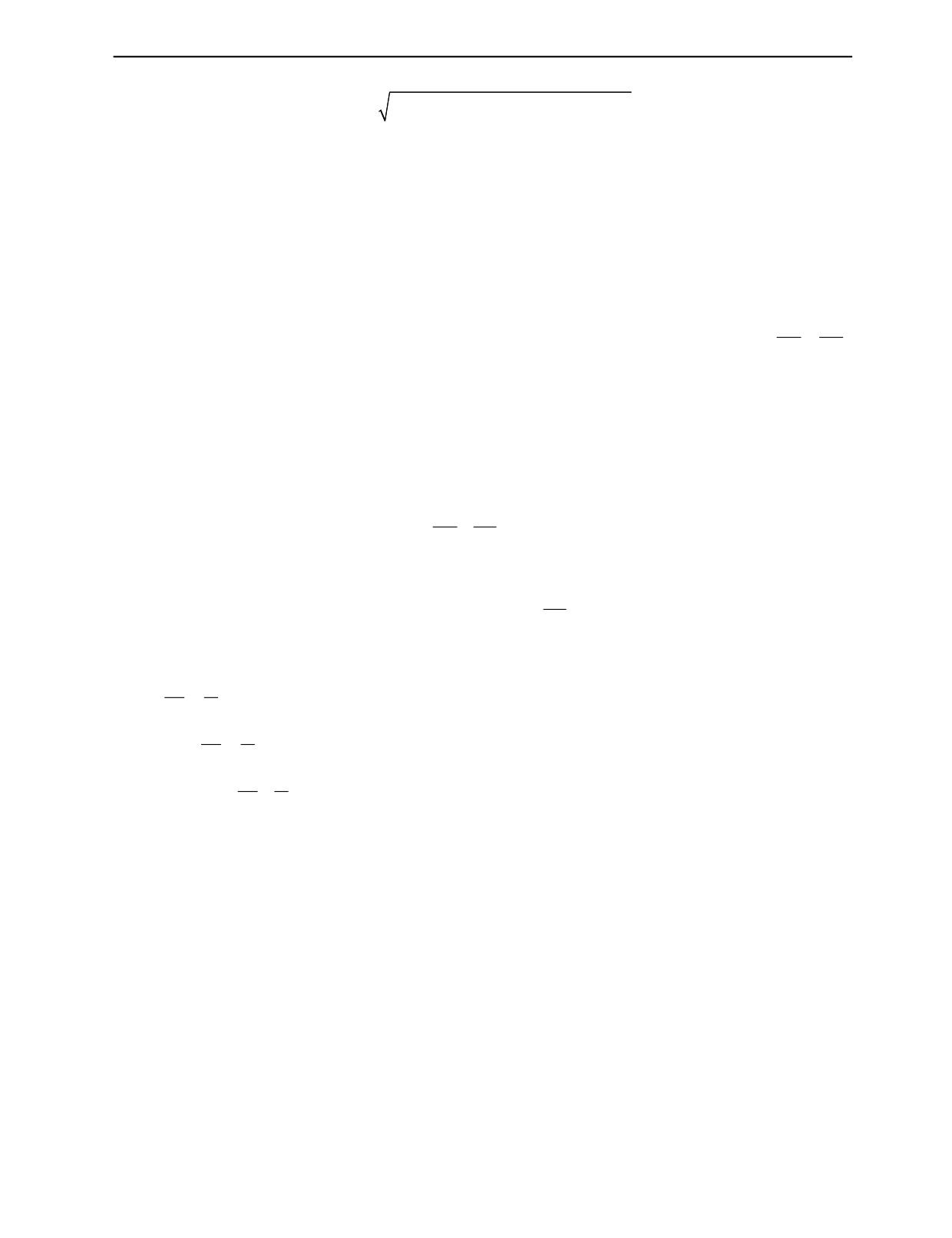
На рис. 2 показана построенная таким образом магнитная линия, описывающая дефект в виде
гауссианы глубиной 4 мм и раскрытием 24 мм. Силовая линия магнитного поля получена с учетом не-
линейности ферромагнетика (сталь 20) с 10 % однородным шумом во входных значениях магнитного
поля. Внешнее магнитное поле было направлено по оси абсцисс, его величина составляла 8089 А/м.
Уровень измерений находился в воздухе на высоте 2 мм над бездефектной поверхностью ферромагне-
тика. При решении обратной задачи использовались исходные данные (значения компонент магнит-
ного поля на уровне «измерений»), полученные в результате решения прямой задачи в пакете FEMM.
-0,006
-0,007
-0,008
-0,009
-0,010
-0,10
-0,05
0,00
0,05
0,10
Рис. 2. Плоскость Y = 0. Линия магнитного поля хорошо описывает дефект глубиной 4 мм, раскрытием 24 мм, α = 2,5.
Добавлен 10 % однородный шумом во входных данных. По осям (вертикальная ось OZ, горизонтальная ось OX) отложена
длина в метрах. Метка минус 0,01 м соответствует нижней поверхности металла в бездефектной области. На рисунке
более плавная кривая соответствует форме дефекта.
Часть 2
МОДЕЛИРОВАНИЕ ЭКСПЕРИМЕНТА В ПАКЕТЕ ELMER
На практике двухмерный дефект потери сплошности металла на металлической пластине мож-
но смоделировать на «центральной», равноудаленной от краев дефекта линии трехмерного дефек-
та. Для конфигурации, рассматриваемой в настоящей работе, дефект вытянут в направлении оси
OY (см. рис.1). Условиям двухмерности дефекта удовлетворяет область, где значения Hy слабо
меняются и, к тому же, пренебрежимо малы по сравнению с другими компонентами магнитостати-
ческого поля, поэтому можно считать, что всюду в этой области Hy постоянна, данная область по-
казана на рис. 3. В этой области компоненты Hx и Hz имеют значения порядка 104 А/м, Hy принимает
значения порядка 102 А/м, на «центральной» линии Hy не превышает нескольких А/м.
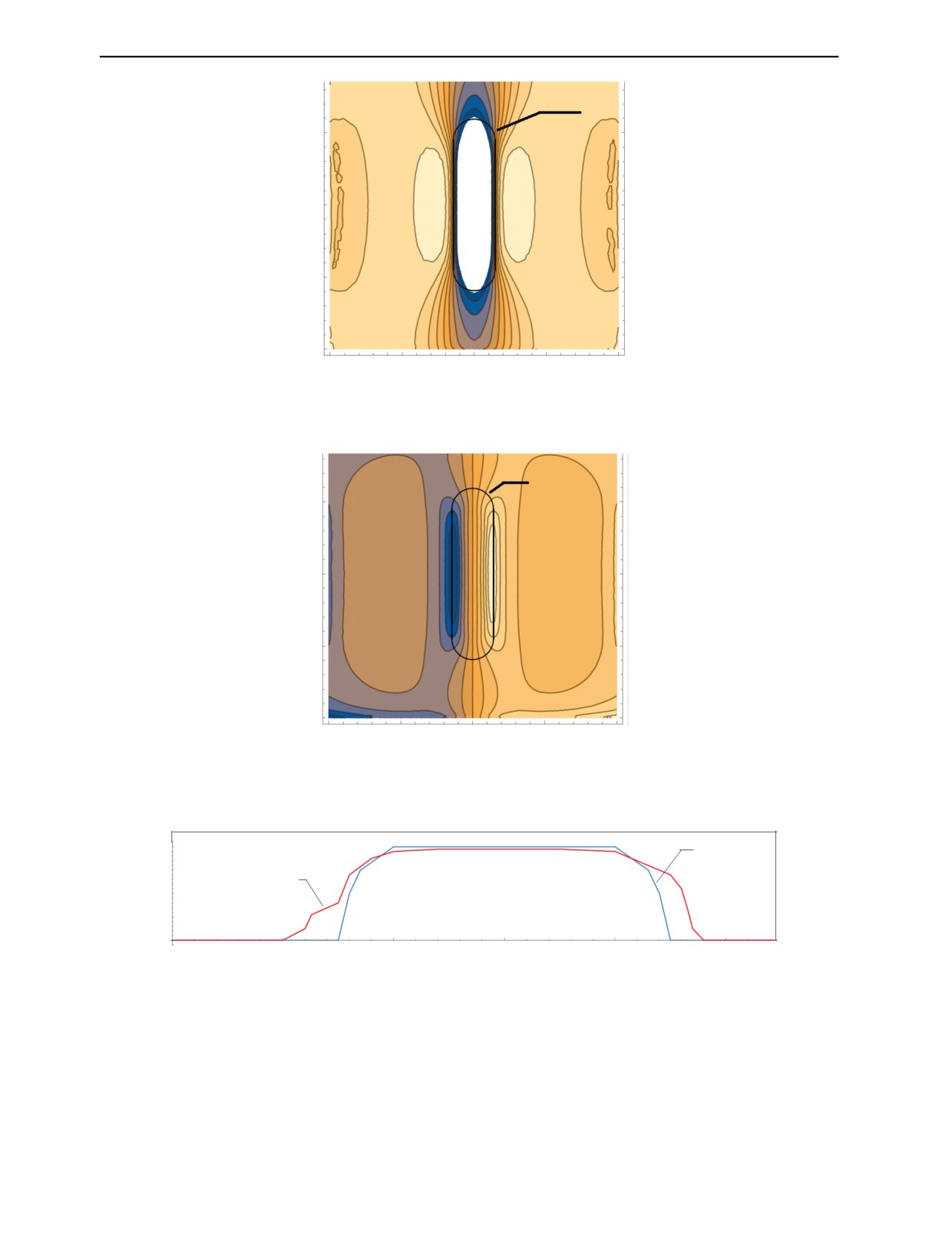
Контуры дефекта можно определить по топографии компонент напряженности магнитного
поля, как показано на рис. 4—6.
Форма дефекта на «центральной» линии в плоскости ХZ восстанавливается по алгоритму опи-
санному ранее.
На рис. 7, 8 показаны дефекты, для которых была решена прямая задача в пакете ELMER по
получению компонент магнитостатического поля на уровне 2 мм над бездефектной поверхностью
металлической пластины, по которым впоследствии и рассчитывалась геометрия дефектов.
Дефектоскопия
№ 12
2021
Методика практического восстановления параметров формы ...
51
1
2
3
3
5
5
4
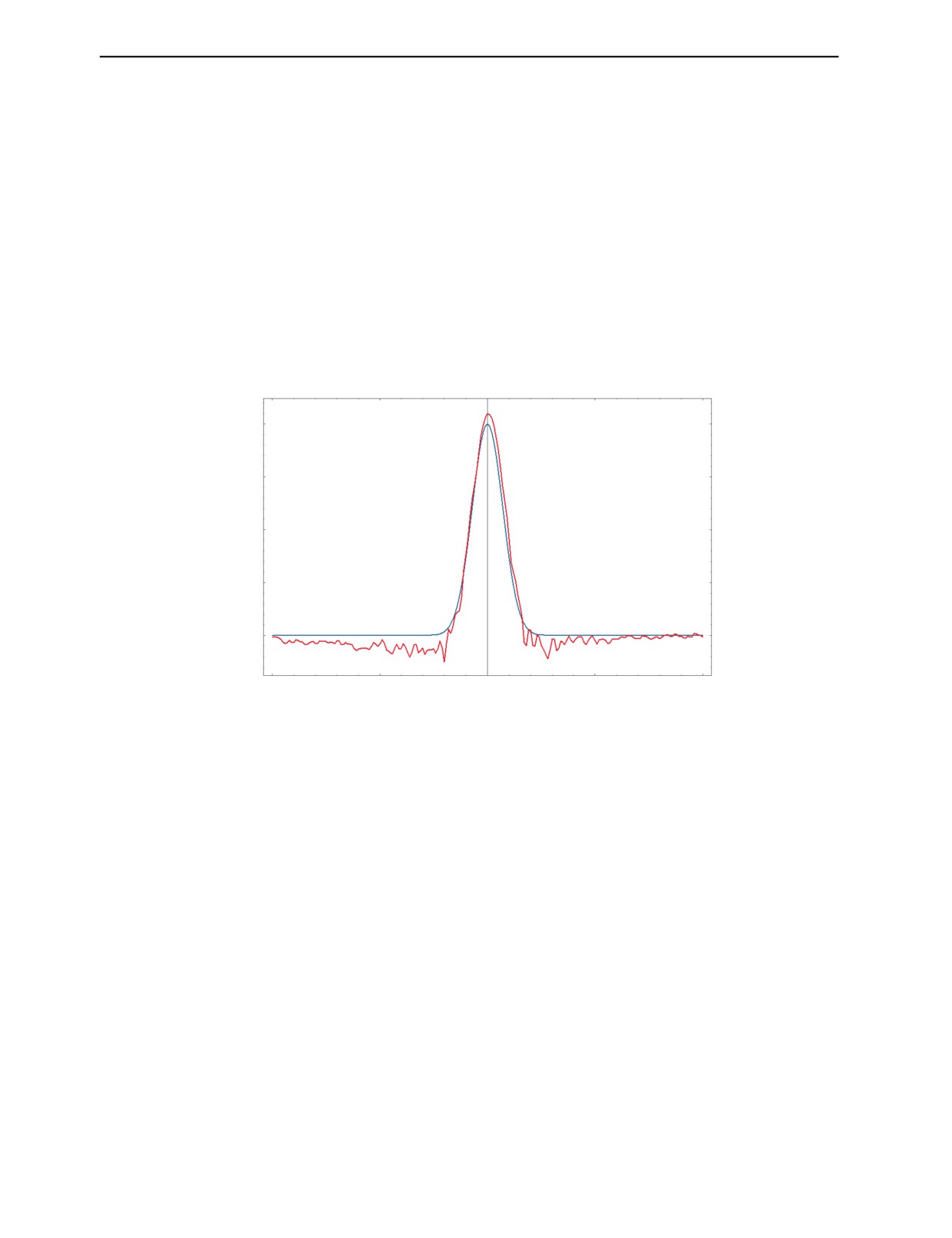
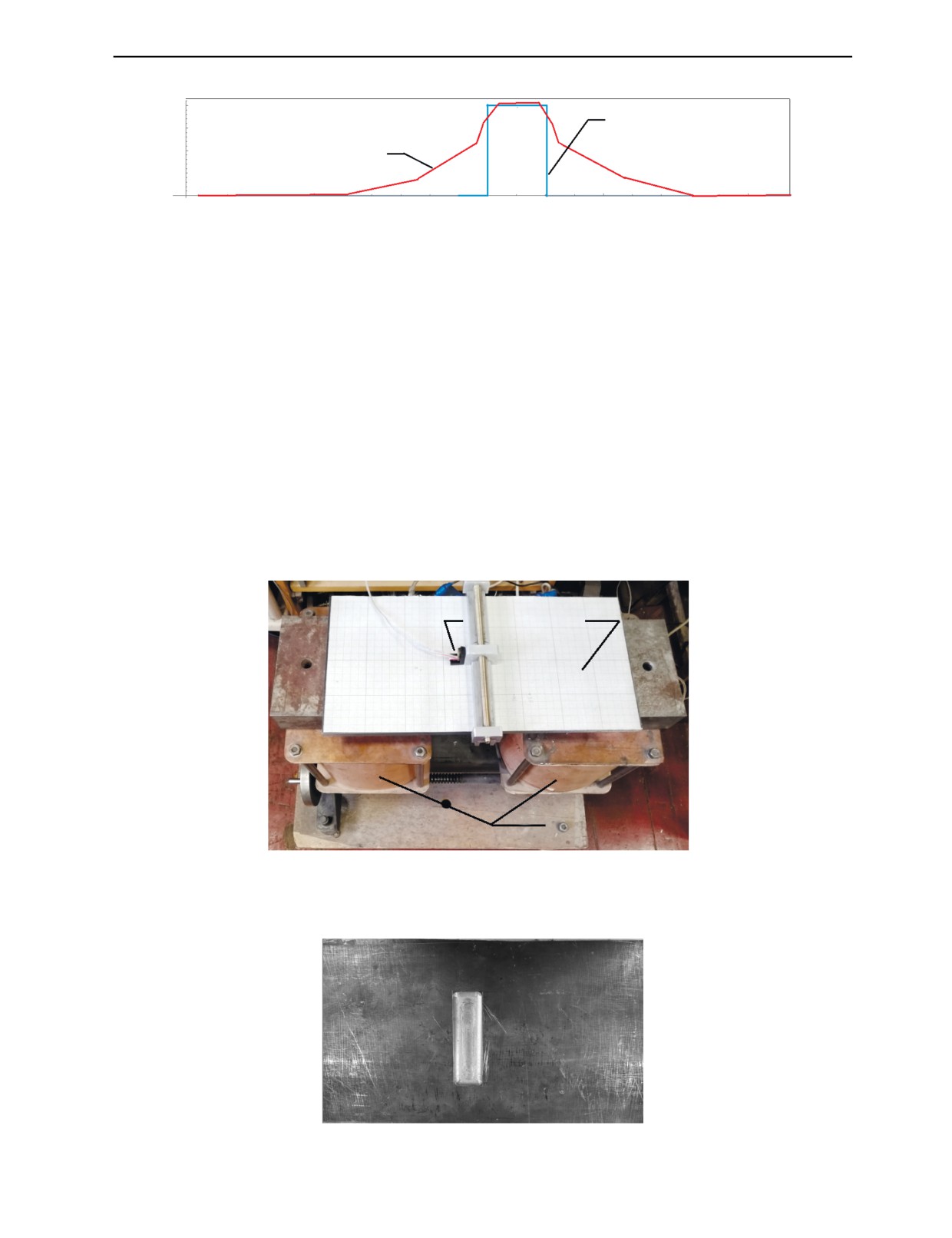
Рис. 3. Экспериментальная установка, смоделированная в пакете ELMER: 1 — поверхностный дефект; 2 — исследуемая
стальная пластина (сталь 20, размеры 200 мм — 400 мм, толщина 10 мм); 3 — полюса электромагнита; 4 — магнитопровод.
Материал полюсов магнита и магнитопровода — железо АРМКО; 5 — медная намотка катушек электромагнита. Магни-
тодвижущая сила катушек электромагнита — 1200 Ампер-витков. Размеры установки соответствуют размерам реальной
экспериментальной установки.
В пакете ELMER была смоделирована реальная экспериментальная установка (см. рис. 3).
Результаты численного эксперимента показали, что для исключения искажений в графиках Hx,
Hy и Hz, связанных со способом намагничивания пластины, необходимо из компонент напряженно-
сти магнитного поля Hy и Hz, полученных в результате решения прямой задачи с учетом дефекта в
пластине, вычесть соответствующие компоненты, полученные в результате решения прямой зада-
чи от пластины, не содержащей дефекта. Из Hx также была вычтена соответствующая компонента,
однако к результату было добавлено среднее значение Hx в бездефектной пластине на отрезке, где
поле менялось незначительно (результирующие компоненты поля показаны на рис. 11). Вышеупо-
мянутый отрезок имеет общую длину 129 мм, включая отрезок под дефектом и отрезки по 50 мм
от краев от границы дефекта вдоль «центральной» линии (рис. 4).
В результате проведения численного эксперимента были подобраны величины шагов дис-
кретизации по осям ОХ и ОZ (обозначим их Δ и Δz соответственно), позволяющим решать за-
дачу для плавных дефектов произвольной формы. Величины шагов дискретизации составили:
для Δ — 1 мм, для Δz — 2 мм.
Y, мм
0,15
1
2
0,10
0,05
0,00
X, мм
0,10
0,15
0,20
0,25
0,30
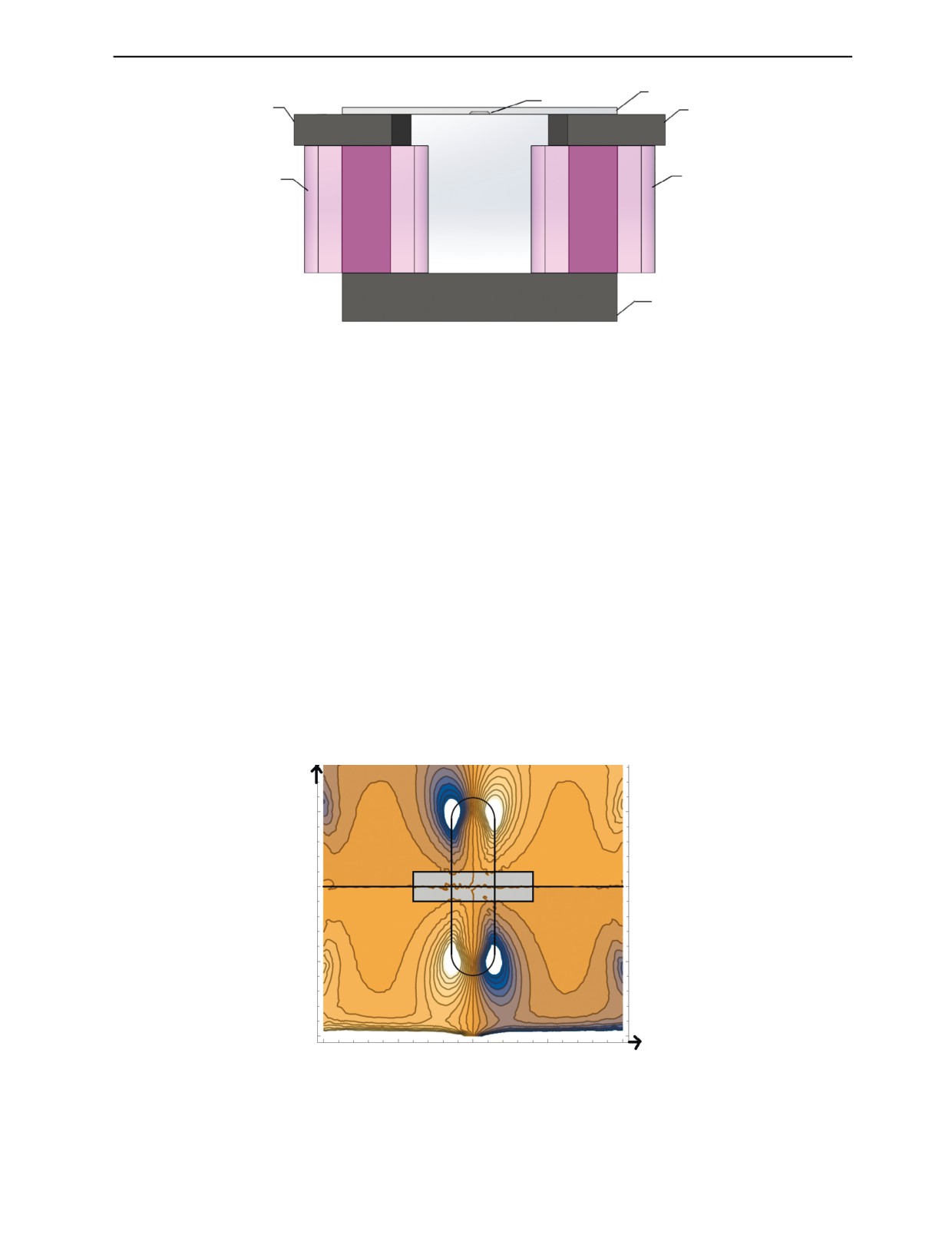
Рис. 4. Топография магнитного поля в плоскости z = Zm получена в результате решения прямой задачи в пакете ELMER.
Показана взаимная конфигурация изолиний Hy и дефекта. Четыре полюса Ну показывают края дефекта. Цифрой 1 обо-
значена область, в которой реальный трехмерный дефект обладает свойствами двухмерности. Цифра 2 обозначает сече-
ние плоскости XY плоскостью XZ, на которой восстанавливаем геометрию дефекта.
Дефектоскопия
№ 12
2021
52
А.В. Никитин, А.В. Михайлов, А.С. Петров и др.
1
0,15
0,10
0,05
0,00
0,10
0,15
0,20
0,25
0,30
Рис. 5. Топография магнитного поля в плоскости z = Zm получена в результате решения прямой задачи в пакете ELMER.
Показана взаимная конфигурация изолиний Hx и дефекта. Цифрой 1 обозначен край дефекта.
1
0,15
0,10
0,05
0,00
0,10
0,15
0,20
0,25
0,30
Рис. 6. Топография магнитного поля в плоскости z = Zm получена в результате решения прямой задачи в пакете ELMER.
Показана взаимная конфигурация изолиний Hz и дефекта. Цифрой 1 обозначен край дефекта.
Z, мм
1
4
3
2
2
1
180
190
200
210
220
X, мм
Рис. 7. Силовая магнитная линия описывает локальную геометрию дефекта вдоль «центральной» линии. Глубина де-
фекта 4 мм, раскрытие дефекта 29 мм. Компоненты магнитного поля были получены над бездефектной поверхностью
металла (сталь 20), на высоте 2 мм, в результате решения прямой задачи в пакете ELMER. Кривая 1 показывает форму
дефекта; кривая 2 представляет силовую магнитную линию.
В результате, были получены магнитные силовые линии, хорошо описывающие глубину дефек-
та (см. рис. 7, 8). Величину раскрытия дефекта можно легко определить по топографии магнитного
поля (см. рис. 4—6).
Дефектоскопия
№ 12
2021
Методика практического восстановления параметров формы ...
53
Z, мм
2,0
1
1,5
2
1,0
0,5
5
10
15
20
X, мм
Рис. 8. Силовая магнитная линия описывает локальную геометрию дефекта вдоль «центральной» линии. Глубина де-
фекта 2 мм, раскрытие дефекта 2 мм. Компоненты магнитного поля были получены над бездефектной поверхностью
металла (сталь 20) на высоте 2 мм, в результате решения прямой задачи в пакете ELMER. Кривая 1 показывает форму
дефекта; кривая 2 представляет силовую магнитную линию.
Часть 3
ПРОВЕРКА МЕТОДИКИ НА ЭКСПЕРИМЕНТЕ
Для экспериментальной проверки приведенной выше методики была собрана эксперимен-
тальная установка, показанная на рис. 8. Измерения компонент магнитного поля проводились
с помощью интегральной микросхемы, содержащей твердотельный трехосный датчик Холла
ALS31300EEJASR-1000 [13]. Микросхема была установлена в корзинку и двигалась над безде-
фектной поверхностью пластины на расстоянии 2 мм.
В целях уменьшения шума во входных данных, каждое значение измерения представляет собой
среднеарифметическую величину от 1000 измерений в данной точке.
Искусственный дефект показан на рис. 9. Металлические пластины с дефектом и без дефекта
сделаны из стали 20.
3
2
1
Рис. 9. Экспериментальная установка:
1 — система намагничивания стальной пластины; 2 — пластина из стали 20, размером 400 мм на 200 мм; 3 — «корзинка» для пере-
мещения интегральной микрохемы с датчиком ALS31300EEJASR-1000.
Рис. 10. Внешний вид искусственного дефекта. Глубина дефекта 4 мм, раскрытие — 29 мм.
Дефектоскопия
№ 12
2021
54
А.В. Никитин, А.В. Михайлов, А.С. Петров и др.
30 000
А/м
20 000
10 000
H
x
50
100
150
200
x, мм
-10 000
-20 000
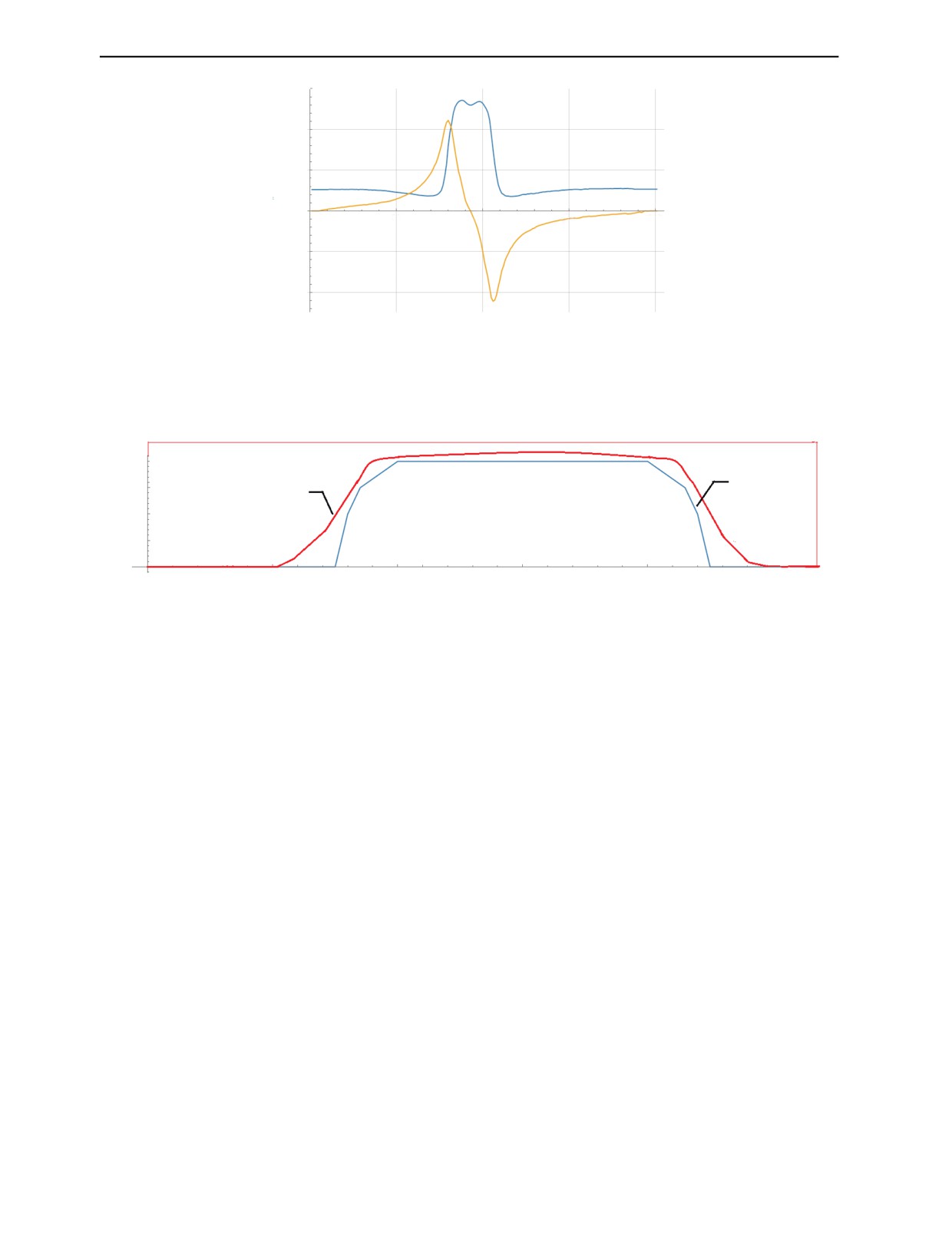
Рис. 11. После обработки экспериментальных данных устранены искажения, вносимые источником магнитного поля, и
теперь значения компонент напряженности магнитного поля не отличаются от соответствующих значений, получаемых
в результате решения прямой задачи в пакетах FEMM и ELMER.
Z, мм
4
1
2
3
2
1
180
190
200
210
220 X, мм
Рис. 12. Силовая магнитная линия описывает локальную геометрию дефекта вдоль «центральной» линии. Глубина де-
фекта 4 мм, раскрытие дефекта 29 мм. Компоненты магнитного поля были получены экспериментально, над безде-
фектной поверхностью металла (сталь 20), на высоте 2 мм. Кривая 1 показывает форму дефекта; кривая 2 представляет
силовую магнитную линию.
Датчик двигался вдоль «центральной» линии (см. рис. 3). После процедур вычитания, описан-
ных в предыдущей части, получили графики для Hx и Hz, соответствующие аналогичным, при рас-
чете начальных значений в пакете FEMM, где поле задается значениями потенциалов на границах
расчетной области «сверху» и «снизу» и отсутствием тангенциальной составляющей напряжен-
ности магнитного поля на боковых ребрах этой области (см. рис. 10).
В результате экспериментально была получена магнитная линия, хорошо описывающая ло-
кальную геометрию реального дефекта вдоль «центральной» линии (рис. 12).
Часть 4
ОБЛАСТЬ ПРИМЕНИМОСТИ МЕТОДИКИ
В результате проведения эксперимента и последующей обработки его результатов получено
подтверждение успешности работы методики, а также подтверждение того, что рассчитанные в
пакетах FEMM и ELMER начальные условия не отличаются (после проведения соответствующих
процедур обработки) от начальных условий, полученных экспериментально. Таким образом, по-
явилась возможность путем проведения численных экспериментов определить границы размеров
дефектов, определяемых методикой.
Исследовались толщины пластин 9, 10 и 12 мм. Выбор этих величин продиктован тем, что
стенки большинства размеров бурильных труб имеют такие толщины. Максимальная глубина де-
фекта не превышала половины толщины стенки пластины, что опять же выбрано из практических
соображений.
Очевидно что дефект с большими размерами (раскрытие), чем дефект, исследованный в ходе
эксперимента, будет проще описать магнитной линией. Поэтому были исследованы границы
Дефектоскопия
№ 12
2021
Методика практического восстановления параметров формы ...
55
применения методики в сторону уменьшения величины глубины дефекта и величины его раскры-
тия. Из-за подобия рисунков, на которых магнитные линии описывают дефекты, мы не будем их
приводить здесь. В результате численных экспериментов был получен результат — методика с
большой точностью описывает поверхностные дефекты глубиной до 2 мм (см. рис. 8), раскрытие
дефекта до величины 2 мм можно определить по топографии компонент восстановленного магнит-
ного поля в металле.
ЗАКЛЮЧЕНИЕ
В работе впервые представлена практическая методика восстановления геометрии двухмер-
ного дефекта в пластине из магнитомягкого ферромагнетика по данным магнитных преобразо-
вателей, расположенных на противоположной (бездефектной) стороне пластины. При этом были
учтены нелинейные свойства ферромагнетика. Методика подтверждена экспериментально.
Работа выполнена в рамках государственного задания по теме
«Диагностика»,
№ AAAA-A18-118020690196-3.
СПИСОК ЛИТЕРАТУРЫ
1. Дякин В.В., Кудряшова О.В., Раевский В.Я. Поле рассеяния пластины с поверхностным дефектом
в однородном внешнем поле // Дефектоскопия. 2018. № 12. С. 23—31.
2. Дякин В.В. Математические основы классической магнитостатики. РИО УрО РАН, 2016, 404 с.
3. Chadebec O., Coulomb J.-L., Janet F. A review of magnetostatic moment method // IEEE Transactiona
on magnetics. 2006. V. 42. No. 4. P. 515—520.
4. Шур М.Л., Новослугина А.П., Смородинский Я.Г. Магнитное поле дефекта произвольной формы в
плоскопараллельной пластине // Дефектоскопия. 2015. № 11. С. 14—27.
5. Шур М.Л., Новослугина А.П., Смородинский Я.Г. Об обратной задаче магнитостатики // Дефек-
тоскопия. 2013. № 8. С. 43—53.
6. Кротов Л.Н. Реконструкция границы раздела сред по пространственному распределению маг-
нитного поля рассеяния. I. Исследование свойств решения вспомогательной прямой задачи // Дефек-
тоскопия. 2004. № 2. С. 76—82.
7. Кротов Л.Н. Реконструкция границы раздела сред по пространственному распределению магнит-
ного поля рассеяния. II. Постановка и метод решения обратной геометрической задачи магнитостатики
// Дефектоскопия. 2004. № 6. С. 36—44.
8. Vuillermet Y., Chadebec O., Coulomb J.-L., Rouve L.-L., Cauffet G.,Bonjiraud J.L., Demilier L. Scalar
potential formulation and inverse problem applied to thin magnetic sheets // IEEE Transactiona on magnetics.
2008. V. 44. No. 6. P. 1054—1057.
9. Gobov Yu.L., Nikitin A.V., Popov S.E. Solving the Inverse Geometric Problem of Magnetostatics for
Corrosion Defects // Russian Journal of Nondestructive Testing. 2018. V. 54. P. 726—732.
10. Gobov Yu.L., Nikitin A.V., Popov S.E. Solving the Inverse Geometric Problem of Magnetostatics for
Corrosion Defects with Allowance for Nonlinear Properties of Ferromagnet // Russian Journal of
Nondestructive Testing. 2018. V. 54. P. 849—854.
11. Верлань А.Ф., Сизиков В.С. Интегральные уравнения: Методы, алгоритмы, программы.
Справочное пособие. Киев: Наукова думка. 1986.
Дефектоскопия
№ 12
2021