УДК 620.179.14
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ И АНАЛИЗ СИГНАЛА
ВИБРОИНДУКЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ВОЗДЕЙСТВИИ
НОРМАЛЬНОЙ СОСТАВЛЯЮЩЕЙ МАГНИТНЫХ ПОТОКОВ РАССЕЯНИЯ
НАД ДЕФЕКТНЫМ УЧАСТКОМ
© 2021 г. Ю.Л. Николаев1,3,*, П.Н. Шкатов1,3,4,**, Э.Ф. Ахметшина1,***, А.А. Саморуков2,****
1Федеральное государственное бюджетное образовательное учреждение высшего образования
«МИРЭА — Российский технологический университет» (РТУ МИРЭА),
Россия 107996 ЦФО, Москва, ул. Стромынка, 20
2Общество с ограниченной ответственностью «ТМС РУС» (ООО «ТМС РУС»),
Россия 127083 Москва, ул. Верхняя Масловка, 20, стр. 2
3Федеральное государственное бюджетное учреждение науки Научно-технологический центр
уникального приборостроения РАН, Россия 117342 Москва, ул. Бутлерова, 15
4Федеральное государственное бюджетное образовательное учреждение высшего образования
Национальный исследовательский университет «МЭИ»,
Россия 111250 Москва, Красноказарменная ул., 14
Поступила в редакцию 19.12.2020; после доработки 07.05.2021;
Принято к публикации 17.05.2021
Проведено теоретическое и экспериментальное исследование выходного сигнала виброиндукционного преобразо-
вателя (ВИП), формируемого при воздействии на него нормальной составляющей Hn напряженности магнитного поля
рассеяния над дефектом. Теоретическое исследование основано на представлении сигнала ВИП в виде тригонометриче-
ского ряда, ограниченного пятью первыми гармониками. В качестве исходной информации для построения математиче-
ской модели использованы известные закономерности распределения Hn над дефектным участком. На основании полу-
ченной математической модели выявлены закономерности изменения гармонического состава сигнала ВИП при его
перемещении в зоне дефекта с различной амплитудой и частотой вибрации. Результаты теоретического исследования
подтверждены экспериментально. Показаны дополнительные возможности данного способа магнитной дефектоскопии
по сравнению с известными.
Ключевые слова: магнитная дефектоскопия, виброиндукционный преобразователь, нормальная составляющая,
математическая модель, спектральный анализ.
DOI: 10.31857/S0130308221070034
ВВЕДЕНИЕ
Эффективность магнитной дефектоскопии конкретных объектов в значительной степени зави-
сит от выбора типа магниточувствительного преобразователя. Особенности выбора магниточув-
ствительного преобразователя с учетом специфики решаемых задач дефектоскопии рассмотрены
в работе [1]. Обладая рядом преимуществ, по сравнению с другими методами неразрушающего
контроля, магнитный контроль имеет ограниченные возможности отстройки от влияющих факто-
ров из-за меньшей информативности регистрируемых сигналов, чем, например, при вихретоковом
контроле. Вихретоковый сигнал имеет два линейно независимых параметра ― амплитуду и фазу,
в отличие от сигналов магниточувствительных преобразователей, имеющих в качестве параметра
выходного сигнала только амплитуду.
Для повышения достоверности контроля в работе [2] рассмотрен способ, основанный на измере-
нии градиента напряженности магнитного поля с помощью двух дифференциально включенных
магнитостатических элементов. Данный способ позволяет ослабить влияние на выходной сигнал
мешающих факторов, связанных с наличием фона и магнитной неоднородностью объекта контроля.
В работе [3] показано, что дополнительная информация о параметрах объекта контроля может
быть получена путем спектрального анализа сигналов, получаемых при сканировании магнито-
чувствительными преобразователями. Однако для его реализации при традиционном подходе
требуется запись регистрируемых сигналов и их постобработка
В работах [4, 5] предложен вариант индукционного метода магнитной дефектоскопии с
виброперемещением индуктивной катушки преобразователя. Для краткости такой преобразова-
тель будем в дальнейшем называть виброиндукционным преобразователем (ВИП). Сигнал ВИП
20
Ю.Л. Николаев, П.Н. Шкатов, Э.Ф. Ахметшина, А.А. Саморуков
формируется одним чувствительным элементом, пропорционален мгновенной скорости измене-
ния регистрируемой характеристики магнитного поля по координате и является периодической
функцией времени. В отличие от известных магнитоизмерительных преобразователей (ферро-
зондового, Холла и др. [6]) сигнал ВИП имеет два информативных параметра — амплитуду и
фазу гармоник с частотой, кратной частоте колебаний катушки. При вихретоковых измерениях
наличие двух линейно независимых информативных параметров позволяет раздельно измерять
два параметра контролируемого объекта при их одновременном изменении или подавлять влия-
ние одного из них, например, рабочего зазора при дефектоскопии. Следует отметить, что инфор-
мативная составляющая вихретокового сигнала не превышает нескольких процентов от суммар-
ного сигнала. Как следствие — дефекты глубиной до 0,5 мм, как правило, выявляются только на
участках с зачищенной поверхностью, не содержащей магнитных неоднородностей [7].
Наиболее ценная дополнительная информация при использовании ВИП определяется прису-
щим только ему характерным изменением спектрального состава выходного сигнала при воздей-
ствии магнитных потоков рассеяния дефектов. В отличие от известного способа магнитной дефек-
тоскопии [3] гармонические составляющий ВИП регистрируются непосредственно в процессе
контроля. При регистрации нормальной и тангенциальной составляющих магнитных потоков
рассеяния гармонический состав выходного сигнала ВИП различен, изменяется и их связь с пара-
метрами дефекта.
Зависимости изменения выходного сигнала различного вида магнитостатических преобразо-
вателей при регистрации как тангенциальной Hτ, так и нормальной Hn составляющих напряжен-
ности магнитного поля рассеяния достаточно хорошо исследованы [8―11]. Для магнитной
дефектоскопии на основе ВИП опубликованы результаты исследований в виде математических
моделей и соответствующих зависимостей применительно к тангенциальной составляющей [12,
13]. Показано, что при виброперемещении над центром трещины возникает периодический сиг-
нал удвоенной частоты по сравнению с частотой виброперемещения с доминированием 2-ой
гаромоники. Выполненные экспериментальные исследования ВИП сигналов от обеих составля-
ющих и сигналов, получаемых с помощью дифференциально включенных датчиков Холла, с
точки зрения отношения полезного сигнала к фоновой составляющей при полюсном намагничи-
вании изложены в [14]. В данной публикации показано, что отношение «полезный сигнал/фон»
при регистрации магнитных полей дефектов посредством ВИП по обеим составляющим превы-
шает соответствующее значение при регистрации дифференциальным преобразователеми Холла
более, чем в 5 раз.
В настоящей работе изложены исследования, направленные на математическое описание и
анализ закономерностей изменения выходного сигнала ВИП под воздействием нормальной
составляющей Hn напряженности магнитного поля.
Преимущество поиска дефектов путем регистрации Hn связано с тем, что эта составляющая
ортогональна силовым линиям поля намагничивания. Благодаря этому Hn близка к нулю в зоне
магнитной нейтрали намагничивающей системы. Кроме того, при регистрации Hn активная пло-
щадь магниточувствительного преобразователя параллельна поверхности контролируемого объ-
екта и находится в зоне с большей индукцией магнитных потоков рассеяния по сравнению с реги-
страцией тангенциально ориентированным ВИП. Также, очевидно, что расположение плоскости
катушки параллельно поверхности приводит к усреднению ложных сигналов от микронеровно-
стей. К недостаткам дефектоскопии путем измерения Hn относятся ограничения, связанные с кон-
тролем сложнопрофильных участков, например, резьбовых соединений, канавок, галтельных
переходов. Для подобных объектов при реализации измерений по тангенциальной составляющей
профиль витков катушки может быть согласован с профилем поверхности с вибрацией катушки
вдоль образующей.
Отмеченные преимущества регистрации по Hn предполагают возможность эффективного
использования нормально ориентированного ВИП при ручном контроле объектов с поверхностью
малой кривизны.
Схема контроля посредством ВИП, ориентированным на регистрацию Hn, показана на рис. 1.
Участок объекта контроля 2 с поверхностной трещиной 3 намагничивается постоянным маг-
нитным полем с индукцией B, предположительно ориентированным перпендикулярно к трещине.
В результате над дефектом возникает локально распределенное магнитное поле дефекта (жирная
линия) и фоновое магнитное поле (штриховая линия).
В процессе сканирования поверхности объекта контроля индуктивная катушка 1 преобразова-
теля совершает колебания по гармоническому закону. Передача колебательного движения катушки
осуществляется от пьезоэлектрического или электродинамического привода посредством маятни-
Дефектоскопия
№ 7
2021
Математическое описание и анализ сигнала виброиндукционного преобразователя...
21
Направление
сканирования
4
Hn(x)
1
asin ωt
x
В
3
2
Рис. 1. Схема контроля с ВИП, регистрирующим нормальную составляющую Hn(x):
1 ― индуктивная катушка; 2 ― объект контроля; 3 ― поверхностный дефект; 4 ― маятниковый элемент для передачи вибрации на
катушку.
кового переходного элемента 4. Конструкция ВИП с пьезоэлектрическим приводом обеспечивает
амплитуду колебаний до 0,5 мм на частотах порядка 500 Гц и до 2,0 мм на частотах порядка
250 Гц. Амплитуда виброперемещения катушки ВИП с электродинамическим приводом регулиру-
ется в диапазоне до 2,0 ― 5,0 мм на частотах порядка 200 и 150 Гц соответственно.
При любом статическом положении корпуса ВИП и объекта контроля выходной сигнал катуш-
ки является периодической функцией времени, амплитудный спектр которой содержит гармоники,
характерные для распределения напряженности магнитного поля в пределах диапазона вибропе-
ремещения катушки. В зоне дефекта на ВИП воздействуют локально распределенное магнитного
поле дефекта и фоновое магнитное поле, имеющие существенное различие в законах распределе-
ния. В результате измерения амплитудных значений спектральных гармоник и их анализа пред-
ставляется возможным выявить распределения, обусловленные наличием дефекта.
Анализ сигнала ВИП при воздействии нормальной составляющей магнитных потоков рассеяния
над дефектным участком проводился путем математического моделирования и экспериментально.
Фото экспериментальной установки показано на рис. 2. Она содержит систему 1 намагничивания
от магнитного дефектоскопа МД-6 с напряженностью намагничивающего поля порядка 800 А/см
на поверхности полюсных наконечников, координатный стол 2, контрольный образец из стали Ст3
а
б
4
6
5
3
1
5
2
6
Рис. 2. Экспериментальная установка:
а ― общий вид, б ― ВИП.
Данная установка применялась также для прямого измерения распределения напряженности нормальной составляющей
Hn(x) с помощью миллитесламетра ТПУ-01.
Дефектоскопия
№ 7
2021
22
Ю.Л. Николаев, П.Н. Шкатов, Э.Ф. Ахметшина, А.А. Саморуков
150
45
0,1
Д5
1
Д1
Д2
Д3
Д4
30
30
30
30
30
2
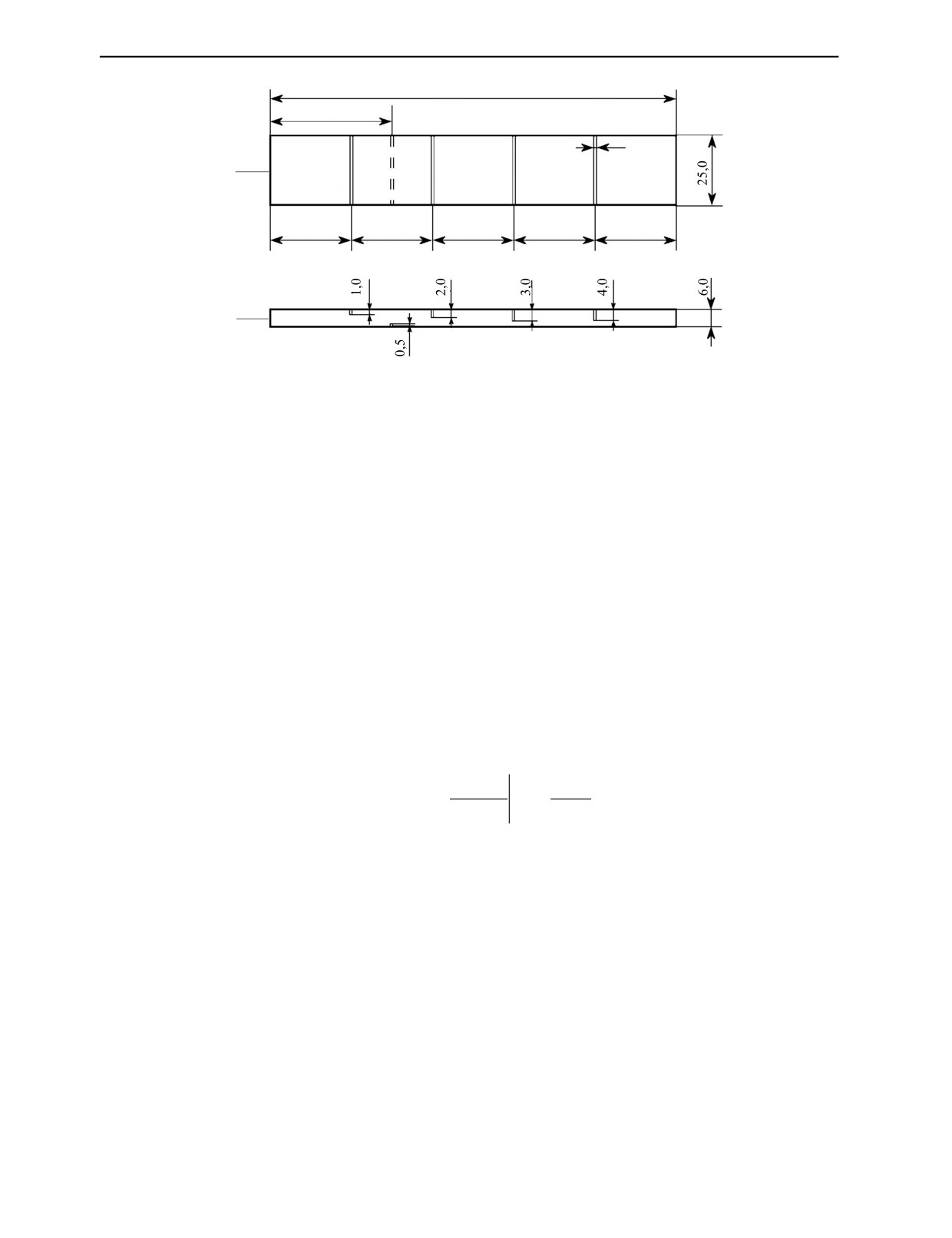
Рис. 3. Эскиз контрольного образца с искусственными дефектами.
с искусственными дефектами (рис. 3) и ВИП, состоящий из привода 4, маятникового стержня 5 дли-
ной 60 мм, индуктивной катушки 6. На рис. 2б стержень с катушкой показаны отдельно.
Обмотка индуктивной катушки выполнена на каркасе диаметром 4 мм проводом диаметром
0,06 мм. Наружный диаметр катушки 4,6―4,8 мм. Электрическое сопротивление катушки 13―13,5
Ом, индуктивность ― 50―55 мкГн.
Данная установка применялась также для прямого измерения распределения напряженности
нормальной составляющей Hn(x) с помощью миллитесламетра ТПУ-01.
Математическое моделирование выходного сигнала ВИП основано на преобразовании выраже-
ния для ЭДС индукции, наводимой в катушке при ее виброперемещении в зоне магнитного поля
дефекта, в тригонометрический ряд.
Наводимая в катушке ЭДС e(t) при ее перемещении пропорциональна изменению усредненной
в охватываемой ее витками зоне соответствующей составляющей напряженности магнитного
поля, в данном случае ― нормальной составляющей Hn. При этом, как показали результаты экс-
периментов, при уменьшении диаметра катушек, начиная с 5 мм, характер зависимостей практи-
чески не изменяется. В связи с этим целесообразно оперировать усредненной величиной Hn,
сохраняя общность получаемых результатов и избегая неоправданного усложнения модели.
Таким образом, при перемещении и вибрации ВИП вдоль контролируемой поверхности парал-
лельно силовым линиям намагничивающего поля представим в виде e(t):
dH x)
dx t)
n
e t)=-k
⋅
⋅
,
(1)
dx
dt
x=x t)
где Hn(x) ― функция, описывающая распределение усредненной по сечению катушки напряжен-
ности Hn вдоль линии перемещения, задаваемой осью координат x с началом отсчета в центре
магнитного поля дефекта (см. рис. 1); t ― время; x(t) ― уравнение перемещения; k ― коэффици-
ент, зависящий от магнитных свойств материала контролируемого объекта и среды контроля,
числа витков и площади сечения катушки, а также неравномерности распределения Hn в ее объеме.
При моногармоническом законе колебаний катушки в точке х = х0:
x(t) = х0 + asin ωt,
(2)
где a и ω ― амплитуда и частота колебаний катушки соответственно.
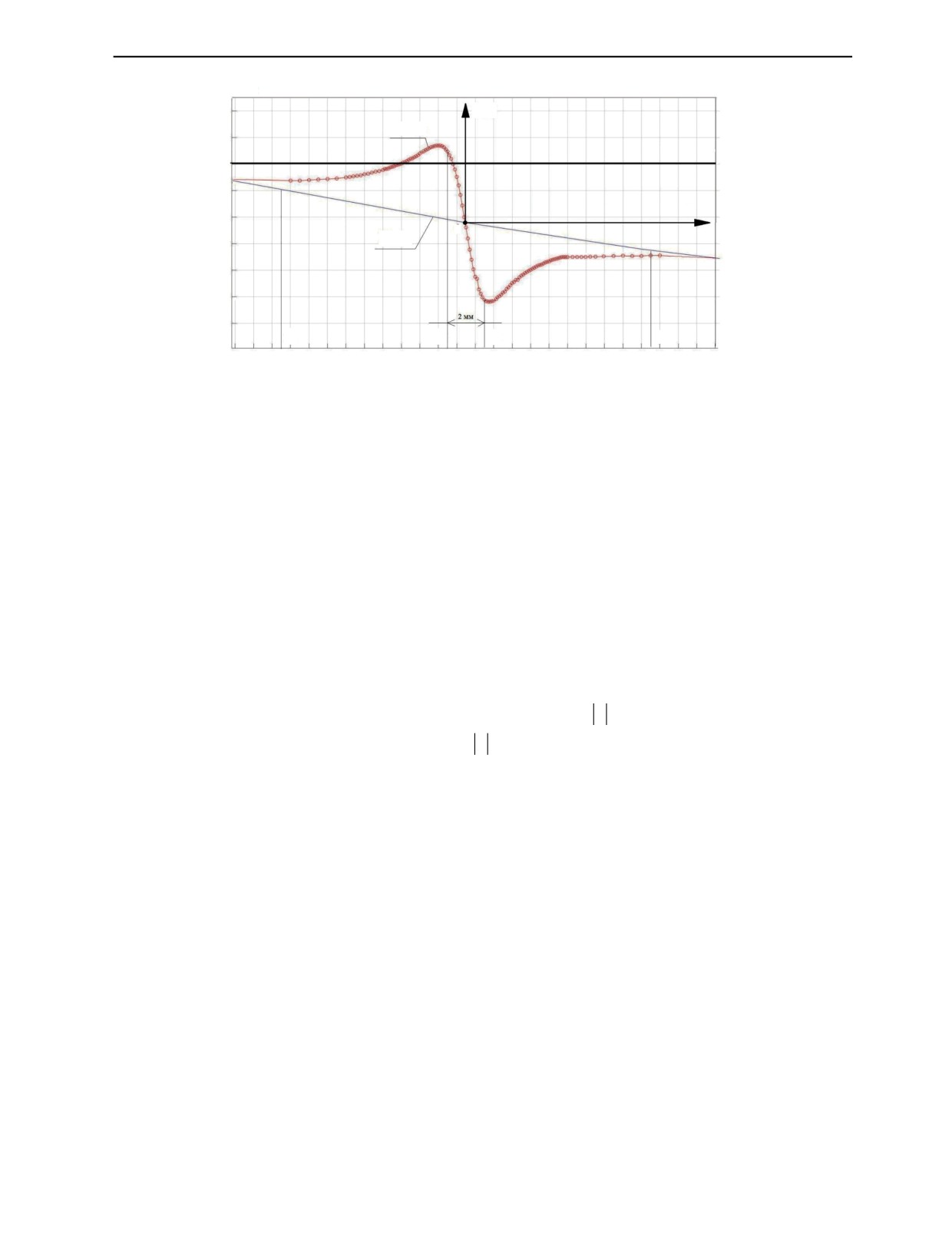
В качестве исходной информации для построения математической модели выходного сигнала
ВИП служит распределение Hn над дефектным участком. Функция распределения Hn(x) может
быть представлена в виде суммы распределений напряженностей магнитного поля рассеяния от
дефекта Hд(x) и фона Hф(x). Это иллюстрируется экспериментально полученными на описанной
экспериментальной установке распределениями Hф(x) и Hn(x) =Hд(x)+Hф(x), представленными на
рис. 4, где х′ ― координаты точек поверхности образца.
Дефектоскопия
№ 7
2021
Математическое описание и анализ сигнала виброиндукционного преобразователя...
23
H, А/см
80
H(x)
Hn(x)
40
0
-40
x
-80
Hф(x)
0
-120
-160
-200
-240
′
′
′
′
77
79
81
83
85
87
89
91
93
95
97
99
01
103
х′, мм
Рис. 4. Зависимости Hn(x) и Hф(x) над образцом с дефектом глубиной h =3,0 мм, шириной b = 0,1 мм в точке х′ = 90 мм.
Аппроксимация функций, имеющих такую же форму, как Hд(x), часто встречается в различных
приложениях [15]. Анализ показал, что целесообразно выбрать аппроксимацию в виде знакочере-
дующегося степенного многочлена, содержащего только нечетные степени переменной х:
m
n
(2n−1)
H x)
=
(−1)
⋅β
⋅ x
(3)
д
∑
i
n=1
Установлено, что высокая точность приближения (3) к эмпирическим распределениям дости-
гается при n > 4, что соответствует многочлену 9-го порядка и выше. Вместе с тем для качествен-
ного анализа достаточно воспользоваться многочленом 5-го порядка, отвечающего свойствами
нечетности, двухмодальности, а также условию наличия 3-х точек перегиба эмпирических рас-
пределений:
3
5
H x)
= -β
x
+β
x
−β
x
,
при
x
≤γ
д
1
2
3
,
(4)
H x)
=
0,
при
x
γ
д
где γ — граница магнитного поля рассеянии дефекта.
Коэффициенты βi уравнения (4) определяются на основе измерения координат и значений
напряженности в характерных точках экспериментально полученного распределения нормальной
составляющей магнитного дефекта. Коэффициент β1 численно равен разности тангенсов угла
наклона графиков суммарного распределения Hn(x) и фона Hф(x), определяемых на линейных
участках x1ʹ, x2ʹ и x3ʹ, x4ʹ (см. рис. 4) соответственно. Коэффициенты β2 и β3 определяются из условия
равенства значений напряженности в точках экстремума эмпирического распределения и его моде-
ли. В частности, для представленного на рис. 4 экспериментально полученного распределения
Hn(x) над дефектом глубиной 3 мм и шириной 0,1 мм в точке х′ = 90 мм (см. рис. 3) уравнение (4)
имеет вид: Hд(x) = -120,7x + 20x3 - 0,9x5. Удовлетворительная сходимость имеет место в пределах
± 3 мм от центра. Для расширения интервала сходимости необходима модель более высокого
порядка, коэффициенты которой определяются по координатам и значениям напряженности в точ-
ках перегиба и на границах распределения.
Подстановка (2) и (4) в (1) дает выражение для информативной составляющей eд(t) выходного
сигнала ВИП в форме тригонометрического ряда:
e t)
=E
cosω
t+E
sin 2
ω
t+E
cos3ω
t+E
sin 4ω
t+E
cos5ω
t,
(5)
д
1m
0
2m
0
3m
0
4m
0
5m
0
где Eim ― амплитудные значения гармонических составляющих:
Дефектоскопия
№ 7
2021
24
Ю.Л. Николаев, П.Н. Шкатов, Э.Ф. Ахметшина, А.А. Саморуков
2
2
4
2
2
4
E
=
aβ
−3β
x
−0,75β
a
+5β
x
+7,5β
x
a
+0,63β
a
kω
,
1m
1
2
0
2
3
0
3
0
3
0
2
2
2
E
=
x
a
-3β
+10β
x
+5β
a
kω
,
2m
0
2
3
0
3
0
3
2
2
(6)
E
=
a
0,75β
−7,5β
x
−0,94β
a
kω
,
3m
2
3
0
3
0
E
4m
=
x
0
a4 (−2,5β
3
)
kω
0
,
5
E
5m
=
a
⋅0,31β
3
⋅
k
ω
0
Анализ зависимостей (6) показывает, что при входе катушки ВИП в зону магнитного поля
дефекта формируется полигармонический выходной сигнал, содержащий от 3 (a ≤ 3 мм) до 5
(а > 3 мм) значимых гармоник. При колебаниях ВИП вблизи центра магнитного поля дефекта
амплитуды Е1m и Е3m возрастают, достигая над дефектом (х0 = 0) наибольших значений. Амплитуды
Е2m и Е4m убывают, принимая в точке х0 = 0 нулевые значения.
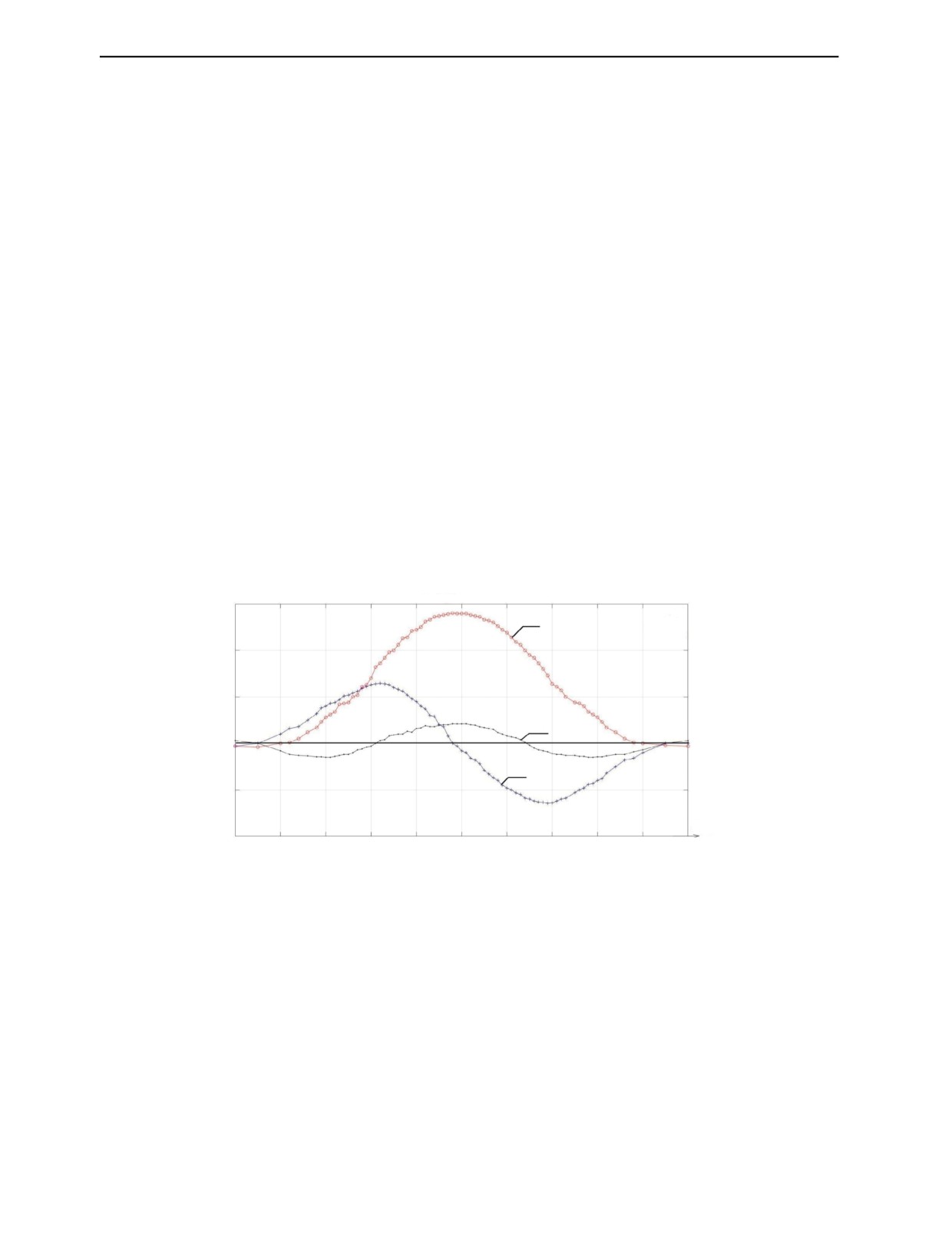
На рис. 5 показаны экспериментальные графики изменения ЭДС Ei(x) (i = 1, 2, 3) первых трех
гармоник, измеренной в действующих значениях, при перемещении ВИП вдоль оси x в пределах
± 5 мм от центра дефекта глубиной 3 мм при а = 3 мм. Максимумы Ei нечетных гармоник и пико-
вого значения выходного сигнала наблюдаются в пределах ±0,5 мм относительно центра дефекта.
В этих же пределах 2-я гармоника, как и 4-я, обращаются в ноль, изменяя фазу на 180°. С увели-
чением амплитуды a колебаний значение амплитуды 1-й и 3-й гармоник возрастают, причем по 3-й
гармонике ― с большей интенсивностью. Однако с увеличением а свыше 3 мм графики Еi(х) этих
гармоник становятся более плоскими и протяженными. При а = 6 мм границы плоского участка по
1-й гармонике составляют ± 2 мм. Поэтому центр магнитного поля дефекта целесообразно опре-
делять по нулевому значению амплитуды 2-й гармоники. В этом случае погрешность определения
центра не превышает десятых долей мм.
Еi, мВ
15
Е1
a = 3 мм
f = 120 Гц
10
5
Е3
0
Е2
-5
-10
85
86
87
88
89
90
91
92
93
94
95
х′, мм
Рис. 5. Экспериментальные зависимости
Еi гармоник вносимой ЭДС при перемещении ВИП над дефектным участком:
глубина дефекта h = 3 мм, ширина b = 0,1 мм, координата х′ = 90 мм.
Таким образом, наличие дефекта и его координата определяются по максимумам амплитуд Е1m,
Е3m и минимуму амплитуды четных гармоник.
Распределение нормальной составляющей фонового поля Hф(x) моделируется на интервале
[x - а, x + а] линейной функцией:
eф(t) = bфx + c,
где bф < 0 ― тангенс угла наклона Hф(x) на заданном интервале.
В этом случае на основании (1) и (2) фоновая составляющая выходного сигнала в ВИП eф(t)
представляет собой гармонику с частотой колебаний катушки, амплитуда которой пропорцио-
нальна в bф:
Дефектоскопия
№ 7
2021
Математическое описание и анализ сигнала виброиндукционного преобразователя...
25
ф
e t)
= -kb ⋅aω⋅
ф
cosωt = E
фm
cosωt,
где Eфm ― амплитудное значение.
Фоновая гармоника eф(t) и 1-я гармоника информативного сигнала e1д(t) (5) совпадают по фазе,
поэтому выходной сигнал ВИП включает сумму этих гармоник.
Из анализа выражений, описывающих выходной сигнал ВИП при воздействии на него нор-
мальной составляющей магнитных потоков рассеяния над дефектом, следует, что с увеличением
частоты колебаний амплитуды гармоник ряда (5) Ефm линейно возрастают.
С увеличением амплитуды виброперемещения а увеличение амплитудных эначений Ефm носит
более сложный характер. При амплитуде колебаний a ≤ 0,2γ значимы первые три гармоники.
Максимум Е1m в точке x0 = 0 превышает максимум E3m в той же точке более чем на порядок и в
несколько раз ― максимумы E2m, расположенные вблизи точек экстремумов распределения напря-
женности Hn(x). С увеличением а в точке x0 = 0 свыше 0,25γ амплитуда Е3m интенсивно нарастает,
в то время как приращение амплитуды Е1m начинает убывать. В результате амплитуда E1m и E3m
становятся соизмеримы.
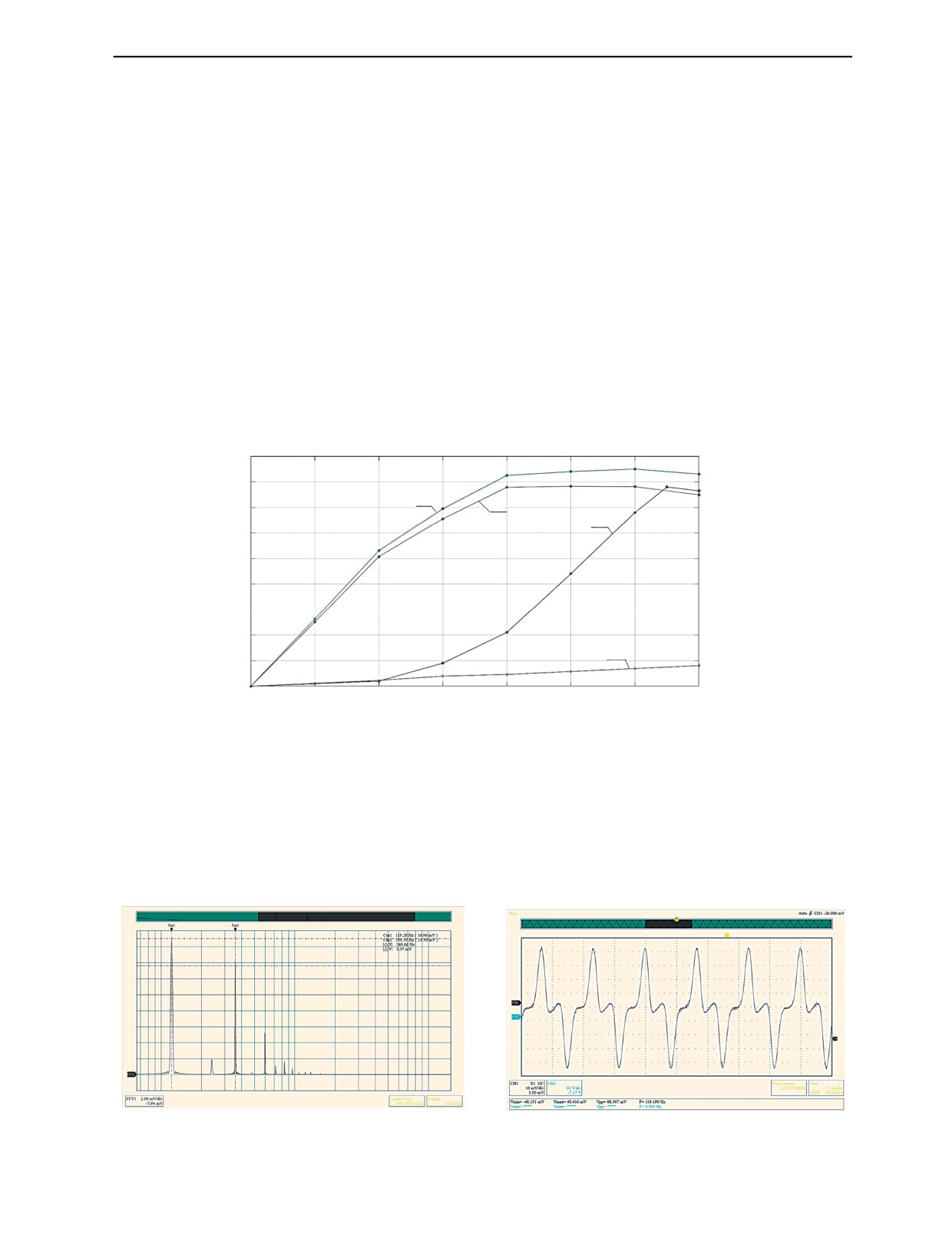
Сделанные выводы подтверждаются полученными по экспериментальным данным зависимо-
стям, представленным на рис. 6.
Еi, мВ
18
16
I
14
II
III
12
10
8
6
4
IV
2
a, мм
0
0
1
2
3
4
5
6
7
Рис. 6. Зависимости действующих значений гармоник ЭДС от амплитуды колебаний:
I - Е1 = Е1(a) ― 1-я гармоника выходного сигнала; II - вносимая дефектом информативная составляющая 1-й гармоники E1вн(а)=
= E1(а) - Eф(а); III ― Е3 = Е3(a) — 3-я гармоника; IV — Е1ф(а) ― фоновая составляющая 1-й гармоники.
Так как 1-я и 3-я гармоники ряда (5) совпадают по фазе, пиковые значения суммарного сигнала
равны сумме Е1 и Е3, что подтверждается показанными на рис. 7, 8 спектрограммой и осцилло-
граммой выходного сигнала при а = 6 мм. Следовательно, при регистрации дефектов по пиковому
значению выходного сигнала ВИП отношение сигнал/фон и пороговая чувствительность к дефек-
там повышаются.
Рис. 7. Спектрограмма выходного сигнала при амплитуде
Рис. 8. Осциллограмма выходного сигнала при амплитуде
колебаний а = 6 мм.
колебаний а = 6 мм.
Дефектоскопия
№ 7
2021
26
Ю.Л. Николаев, П.Н. Шкатов, Э.Ф. Ахметшина, А.А. Саморуков
Для ВИП с вышеописанными параметрами величина предельного рабочего зазора Zр опреде-
лялась экспериментально на образце, представленном на рис. 3. Предельным принималась вели-
чина Zр, при которой полезный сигнал превышал среднеквадратическое значение фона и стохасти-
чески распределенного шума в 2 раза. Поверхностные дефекты Д1 и Д4, в виде прямоугольных
прорезей Д1 — 1,0 × 0,1 мм и Д2 — 4,0 × 0,1 мм, выявлялись при рабочем зазоре до 4,0 и 8,0 мм
соответственно. Дефект Д5 в виде прямоугольной прорези 0,5 × 0,1 мм, расположенный на тыль-
ной поверхности образца, выявлялся при рабочем зазоре до 2,0 мм.
Проверка чувствительности ВИП к дефектам малых размеров выполнялась на аттестованных
образцах дефектов для магнитопорошкового контроля. Для дефекта шириной 3,5 мкм и глубиной
0,2 мм при амплитуде колебаний катушки 2 мм на частоте 200 Гц пиковое значение выходного
сигнала ВИП составило порядка 2,5 мВ при рабочем зазоре Zр = 0,5 мм, что превышает уровень
фона и шума более чем в 5 раз. Данный результат свидетельствует о более высокой чувствитель-
ности ВИП к дефектам малых размеров по сравнению с вихретоковыми преобразователями при
сопоставимых условиях измерения [7].
Преимуществом нормально ориентированного ВИП по сравнению с тангенциально ориенти-
рованным, идентичным по параметрам катушки, и прочих равных условиях контроля является
более высокий уровень выходных сигналов и пороговой чувствительности. При регистрации
дефекта Д3 в диапазоне амплитуды виброперемещения a = 1―5 мм уровень выходного сигнала по
пиковому значению составил 5,2―25 мВ, а по амплитуде информативной составляющей 1-й гар-
моники ― 5―15,5 мВ, что превышает уровни выходного сигнала тангенциально ориентированно-
го ВИП в 1,5 и 2 раза соответственно. При этом измеренное среднеквадратическое значение шума
в обоих случаях не превышало 0,15 мВ. С точки зрения информативности контроля различие
заключается в разных признаках определения местоположения дефекта — по четным гармоникам
для тангенциально ориентированного ВИП и по нечетным для нормально ориентированного.
Исходя из этого, вибрационные способы регистрации магнитных полей дефектов могут дополнять
друг друга.
Использованные в исследованиях экспериментальные образцы ВИП представляют собой кон-
струкции с габаритными размерами приводного узла электромагнитного ВИП, составляющими
30×55×70 мм, и пьезоэлектрического Ø35×40 мм при длине маятниковой части 60—70 мм. Однако
имеется возможность дальнейшей оптимизация конструкции, связанная с уменьшением габарит-
ных размеров приводных узлов.
ВЫВОДЫ
1. Выходной сигнал ВИП, обусловленный нормальной составляющей магнитных потоков рас-
сеяния дефекта типа трещины, с приемлемой для практики погрешностью описывается математи-
ческой моделью в виде тригонометрического ряда, включающего первые 5 гармоник с круговой
частотой 1-й гармоники ω0, равной частоте вибрации ВИП.
2. Установлено, что при размещении ВИП в пределах ±0,5 мм относительно центра дефекта
амплитуды нечетных гармоник Е1 и Е3 достигают максимума, а амплитуды четных ― Е2 и Е4 при-
нимают нулевые значения. Пиковые значения выходного сигнала являются суммой амплитудных
значений нечетных гармоник.
3. С увеличением амплитуды a колебаний амплитуды 1-й и 3-й гармоник возрастают, причем
по 3-й гармонике ― с большей интенсивностью. Однако с увеличением а свыше 3 мм простран-
ственное распределение гармоник становятся более плоскими и вытянутым вдоль линии сканиро-
вания. Например, при увеличении от 3 до 6 мм границы плоского участка по 1-й гармонике воз-
растают от ± 0,5 до ± 2 мм.
4. В реальных условиях контроля наиболее просто выявлять дефекты по превышению пиково-
го значения выходного сигнала ВИП установленного порогового уровня, отсекающего фоновый и
шумовой сигналы, а также незначительные по уровню сигналы, возникающие при входе катушки
в зону дефекта.
5. Амплитуда 2-й гармоники сигнала ВИП принимает нулевое значение строго под центром
дефекта независимо от амплитуды вибрации, что удобно использовать для определения положения
дефекта.
6. Экспериментально установлено, что поверхностные дефекты, в виде прямоугольных про-
резей с размерами 1,0 × 0,1 мм и 4,0 × 0,1 мм, выявлялись при рабочем зазоре до 4,0 и 8,0 мм соот-
ветственно. Дефект в виде прямоугольной прорези 0,5 × 0,1 мм, расположенный на тыльной
поверхности образца, выявлялся при рабочем зазоре до 2,0 мм.
Дефектоскопия
№ 7
2021
Математическое описание и анализ сигнала виброиндукционного преобразователя...
27
7. Проверка чувствительности ВИП к дефектам малых размеров выполнялась на аттестован-
ных образцах дефектов для магнитопорошкового контроля. Для дефекта шириной 3,5 мкм и глу-
биной 0,2 мм при амплитуде колебаний катушки 2 мм на частоте 200 Гц пиковое значение выход-
ного сигнала ВИП составило порядка 2,5 мВ.
Работа выполнена при частичной финансовой поддержке со стороны системы мотивирующих
выплат и оценки эффективности профессорско-преподавательского состава
«МИРЭА ―
Российский технологический университет» (РТУ МИРЭА).
СПИСОК ЛИТЕРАТУРЫ
1. Реутов Ю.Я., Щербинин В.Е., Волков А.В. Возможности выбора преобразователей магнитного
поля для дефектоскопии // Дефектоскопия. 2014. № 12. С. 71―85.
2. Dehui W., Lingxin S., Xiaohong W., Zhitian L. A Novel Non-destructive Testing Method by Measuring
the Change Rate of Magnetic Flux Leakage // Journal of Nondestructive Evaluation. 2017. V. 36. Is. 2. № 24.
3. Пашагин А.И., Бенклевская Н.П., Щербинин В.Е. Использование гармонического анализа сигнала
индукционного преобразователя для повышения информативности контроля // Дефектоскопия. 2005.
№ 11. С. 15―19.
4. Шкатов П.Н., Николаев Ю.Л., Чернова А.В., Юрченко П.В., Кузнецова Г.В. Индукционный пре-
образователь / Патент РФ № 2600517. Бюл. изобр. 2016. № 30.
5. Шкатов П.Н., Николаев Ю.Л., Чернова А.В., Юрченко П.В. Способ магнитной дефектоскопии /
Патент РФ № 2566418. Бюл. изобр. 2015. № 30.
6. Бакунов А.С., Горкунов Э.С., Щербинин В.Е. Магнитный контроль / Учеб. пособие. Под общ. ред.
В.В. Клюева. М.: Издательский дом «Спектр», 2011. 192 с.
7. Федосенко Ю.К., Шкатов П.Н., Ефимов А.Г. Вихретоковый контроль / РОНКД. Москва, 2014.
Сер. Диагностика безопасности (2-е издание). 224 с.
8. Shi Y., Zhang C., Li R., Cai M., Jia G. Theory and Application of Magnetic Flux Leakage Pipeline
Detection // Sensors (Basel). 2015. V. 15 (12). P. 31036―31055.
9. Azad A., Kim N. Design and Optimization of an MFL Coil Sensor Apparatus Based on Numerical Survey
// Sensors (Basel). 2019. V. 19 (22) P. 4869.
10. Wu J., Fang H., Huang X., Xia H., Kang Y., Tang C. An Online MFL Sensing Method for Steel Pipe
Based on the Magnetic Guiding Effect // Sensors (Basel). 2017. V. 17 (12). P. 2911.
11. Anyaoha Peng U., Liu Z., Tsukada K. Analysis of Magnetic-Flux Leakage (MFL) Data for Pipeline
Corrosion Assessment // IEEE Transactions on Magnetics. 2020. V. 56. Is. 6. P. 1―15. Art no. 6200315.
12. Николаев Ю.Л., Шкатов П.Н., Чернова А.В. Исследование сигнала от тангенциальной состав-
ляющей магнитных потоков рассеяния поверхностного дефекта при его регистрации виброиндукцион-
ным преобразователем // Дефектоскопия. 2018. № 5. С. 50―54.
13. Николаев Ю.Л., Шкатов П.Н., Чернова А.В., Саморуков А.А. Моделирование и гармонический
анализ сигнала виброиндукционного преобразователя при его перемещении над намагниченным участ-
ком с поверхностной трещиной // Приборы. 2019. № 4 (226). С. 17―25.
14. Николаев Ю.Л., Ахметшина Э.Ф., Саморуков А.А., Чернова А.В. Оценка соотношения информа-
тивного и фонового сигналов при регистрации магнитных полей поверхностных дефектов магнитоиз-
мерительнымы преобразователями // Измерительная техника. 2020. № 5. С. 43―49.
15. Исаков В.Н., Тимошенко П.И. Локальная интерполяция и аппроксимация в задачах эвристиче-
ского синтеза цифровых фильтров // Российский технологический журнал. 2018. Т. 6. № 4. С.42―64.
Дефектоскопия
№ 7
2021