УДК 620.179.14
ДИФФЕРЕНЦИАЛЬНЫЙ ФОН ЭЛЕКТРИЧЕСКОГО СИГНАЛА,
СНИМАЕМОГО С ИНДУКЦИОННОЙ МАГНИТНОЙ ГОЛОВКИ
© 2021 г. В.В. Павлюченко1, Е.С. Дорошевич1,*
1Белорусский Национальный Технический Университет,
Беларусь 220013 Минск, пр-т Независимости, 65
E-mail: ess.doroshevich@gmail.com
Поступила в редакцию 17.05.2021; после доработки 22.06.2021
Принята к публикации 25.06.2021
Представлены экспериментальные зависимости U(t) электрического напряжения, снимаемого с индукционной маг-
нитной головки (МГ), движущейся относительно магнитного носителя (МН). Выявлены и исследованы фоны краев МН,
локальных дефектов МН, фон неоднородного магнитного поля локального источника, фоны дефектов и структурных
неоднородностей объекта, эфирный электромагнитный фон, фон качества поверхности объекта и поверхностных микро-
скопических неоднородностей материала. Выявлены и исследованы резонансные фоны самовозбуждения измеритель-
ной системы на сигналах краев МН, дефектов МН, приборных и сетевых наводок и помех, дефектов объекта, эфирных
электромагнитных полей. Резонансные пики являются следствием самовозбуждения измерительной системы, включаю-
щей МГ, и возникают на задних фронтах любых сигналов достаточной величины, длительность заднего фронта которых
составляет порядка четверти периода собственных колебаний измерительной системы. Определены амплитудный и
частотный спектры фона сигналов дефектов объекта, МН и помех и описывающие их аналитические выражения.
Показаны результаты выделения полезного сигнала из полного сигнала, записанного на МН. Исследования дифферен-
циального фона электрического сигнала позволяют совместно с разработанными авторами ранее методами гистерезис-
ной интерференции вести контроль свойств объектов в автоматическом режиме с программным управлением, что зна-
чительно повышает чувствительность и точность контроля. Для достижения этой цели рекомендовано устанавливать
параметры системы измерения на пороге возникновения в ней собственных свободных колебаний.
Ключевые слова: магнитный носитель, магнитная головка, дефект, дифференциальный фон электрического сигнала.
DOI: 10.31857/S0130308221080054
ВВЕДЕНИЕ
Для повышения точности контроля свойств объектов разными методами неразрушающего кон-
троля необходимо уменьшать влияние различных отрицательных факторов, сопутствующих про-
цессу контроля. Эти факторы создают фон сигнала, снимаемого с датчика, который следует исклю-
чать из полного сигнала для выделения полезной информации. В случае магнитографического
контроля [1, 2] такой фон создают сигналы краев магнитного носителя, сигналы электромагнит-
ных помех и другие сигналы. Различные помехи могут присутствовать и в сигналах датчиков
вихретоковой дефектоскопии при их предварительной обработке [3], а также при определении
внешних параметров электропроводящего объекта по измерениям возмущений переменного маг-
нитного поля [4].
Выделение полезной информации об объектах при использовании магнитного гистерезиса в
магнитных полей вблизи объектов из электропроводящих материалов [7].
Для разработки способов выделения сигнала дефекта из полного сигнала могут быть исполь-
зованы результаты теоретических и экспериментальных работ по выявлению дефектов: анализ
топографии магнитных полей рассеяния в ферромагнитных изделиях [8], моделирование опреде-
ления геометрических параметров внутренних дефектов методом магнитной дефектоскопии [9],
исследование магнитного поля рассеяния от дефектов трубопровода [10], изучение поля рассея-
ния пластины с поверхностным дефектом в однородном поле [11]. Для этого может быть полезным
компьютерный анализ конфигурации магнитных полей поверхностных дефектов в ферромагнит-
ной пластине методом пространственных интегральных уравнений [12], результаты магнитогра-
фической дефектоскопии изделий с использованием постоянных магнитов [13] и способ оценки
параметров дефектов в сталях [14].
При выделении сигналов, считываемых с магнитного носителя, следует учитывать исследова-
ния наложения друг на друга электрических сигналов преобразователей магнитного поля при
гистерезисной интерференции перекрывающихся во времени импульсов магнитного поля [15] и
формировании изображений электрических сигналов для контроля металлов в импульсных маг-
52
В.В. Павлюченко, Е.С. Дорошевич
нитных полях с использованием гистерезисной интерференции [16]. Надо также отметить боль-
шое количество не достаточно изученных причин возникновения фона сигнала при магнитографи-
ческой дефектоскопии, затрудняющих процесс контроля и понижающих его качество. Поэтому
целью настоящей работы является наиболее полное изучение фона электрического сигнала, сни-
маемого с индукционной магнитной головки при сканировании ею магнитного носителя для повы-
шения точности контроля удельной электропроводности, магнитной проницаемости и геометриче-
ских параметров объектов из электропроводящих материалов в импульсных магнитных полях, а
также контроля дефектов сплошности в этих объектах.
Актуальность проведения данных исследований состоит, в частности, в том, что при осущест-
влении контроля объектов, в том числе объектов ответственного назначения, в настоящее время
требуется повышение точности контроля, его производительности и разрешающей способности,
возможности контроля труднодоступных частей объекта, а также использования одновременно
нескольких методов контроля. Магнитографический метод позволяет получать мгновенное рас-
пределение информационных магнитных полей на площадях в десятки квадратных сантиметров и
существенно больших (порядка 1 м2) с разрешением по площади 0,01 мм2. При считывании инфор-
мации магнитного носителя с помощью магнитооптической пленки с визуализацией полей кон-
троль осуществляется в режиме, близком к режиму реального времени с задержкой на несколько
десятков микросекунд. Более того, разрабатываемые методы контроля с помощью МН могут быть
применены при использовании вихретоковых преобразователей, магнитооптической пленки,
флюкс-детекторов, преобразователей Холла и во многих других случаях.
ОСНОВНАЯ ЧАСТЬ
При сканировании магнитного носителя (МН) индукционной магнитной головкой (МГ) элек-
трический сигнал, снимаемый с нее, пропорционален производной от напряженности магнитного
поля по времени при осуществлении временной развертки сигнала или производной по простран-
ственной координате, вдоль которой происходит движение МГ. Поэтому естественно назвать такой
фон дифференциальным. Наличие этого фона обусловлено многими причинами, исследование
которых проведено в данной работе.
При нахождении дефектов сплошности в диамагнитных и парамагнитных металлических объ-
ектах, а также при получении гистерезисной интерференции (HI) для контроля толщины и удель-
ной электропроводности материала объектов авторами найдены значительные отклонения зависи-
мости электрического напряжения от времени развертки U(t) от нулевого уровня сигнала в отсут-
ствие сигналов полей дефектов исследуемых объектов.
Известно [1, 2, 6], что при движении магнитной головки над краем намагниченного магнитно-
го носителя в ней индуцируется однополярный сигнал и его амплитуда зависит от величины оста-
точной намагниченности МН. Возникает задача нахождения зависимости величины этого сигнала
от расстояния МГ до края МН по линии сканирования и высоте над МН.
Найдем зависимость величины сигнала от
длины участка МН, пробегаемого магнитной
головкой на минимальном расстоянии МГ от
4
40
поверхности МН, то есть на расстоянии тол-
3
щины диэлектрической подложки МН.
2
1
Характеристики используемого магнитного
20
5
носителя такие же, как и в [15, 16].
7
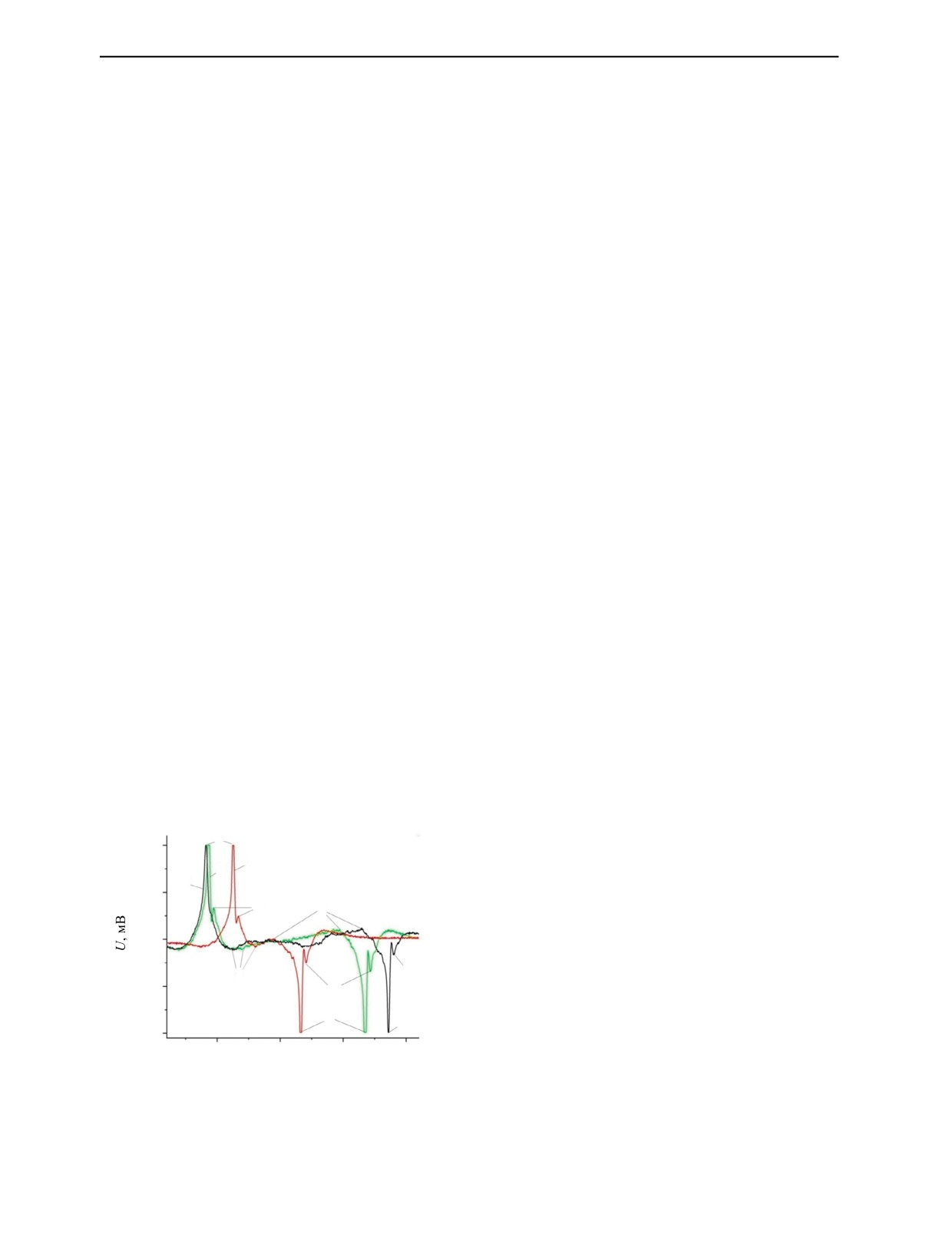
Зависимость U(t), снимаемого с индукци-
онной магнитной головки, сканирующей маг-
0
нитный носитель с записями магнитных
5
6
полей, для участков МН разной длины изо-
-20
5
бражена на рис. 1. Здесь показаны также пики
сигналов, обусловленные началом и концом
4
4
участков МН, резонансные пики и локальные
-40
1
2
3
4
максимумы и минимумы сигнала зависимо-
t, мс
сти U(t). Расстояние от МГ до рабочего слоя
датчика МН составляет 0,16 мм. На рис. 1 и
Рис. 1. Зависимости U(t), снимаемого с МГ, сканирующей
участок МН длиной:
на всех последующих рисунках отрезку вре-
мени 1 мс соответствует отрезок расстояния,
1 — 32 мм; 2 — 27 мм; 3 — 12 мм; 4 — пики сигналов от краев МН;
5 — вторые резонансные пики; 6 — минимумы и 7 — максимумы
равный 1,1 см.
сигнала.
Дефектоскопия
№ 8
2021
Дифференциальный фон электрического сигнала, снимаемого с индукционной...
53
Из графиков на рис. 1 следует, что магнитная головка начинает воспринимать намагниченный
носитель уже на расстоянии, равном примерно 3 мм от ближнего края МН. Сначала величина сиг-
нала падает до -4,38 мВ при 0,33 мс. МГ перестает воспринимать МН на расстоянии около 2 мм
от его дальнего края. В промежутке между пиками 4, соответствующими краям участков МН раз-
ной длины, зависимость U(t) не является горизонтальным линейным отрезком, а имеет минимумы
6 и максимумы 7, что затрудняет процесс контроля объекта. С увеличением амплитуды воздейству-
ющего магнитного поля величина этих максимумов растет (значит, растут и искажения измеряе-
мого сигнала) и достигает величины пиковых значений сигнала 4 от краев МН. Временные (про-
странственные) зависимости сигнала края МН могут быть описаны экспоненциальными, обратны-
ми квадратичными функциями и функциями близкого к ним вида.
Для получения реального фона U(t) выбран магнитный носитель с многочисленными локаль-
ными дефектами, такими, как локальные изломы, потертости, мятые участки МН, повреждения
рабочего слоя и так далее. Влияние всех этих дефектов МН должно быть устранено или скомпен-
сировано. Скомпенсирован должен быть также фон неоднородного магнитного поля локального
источника, используемого при измерениях.
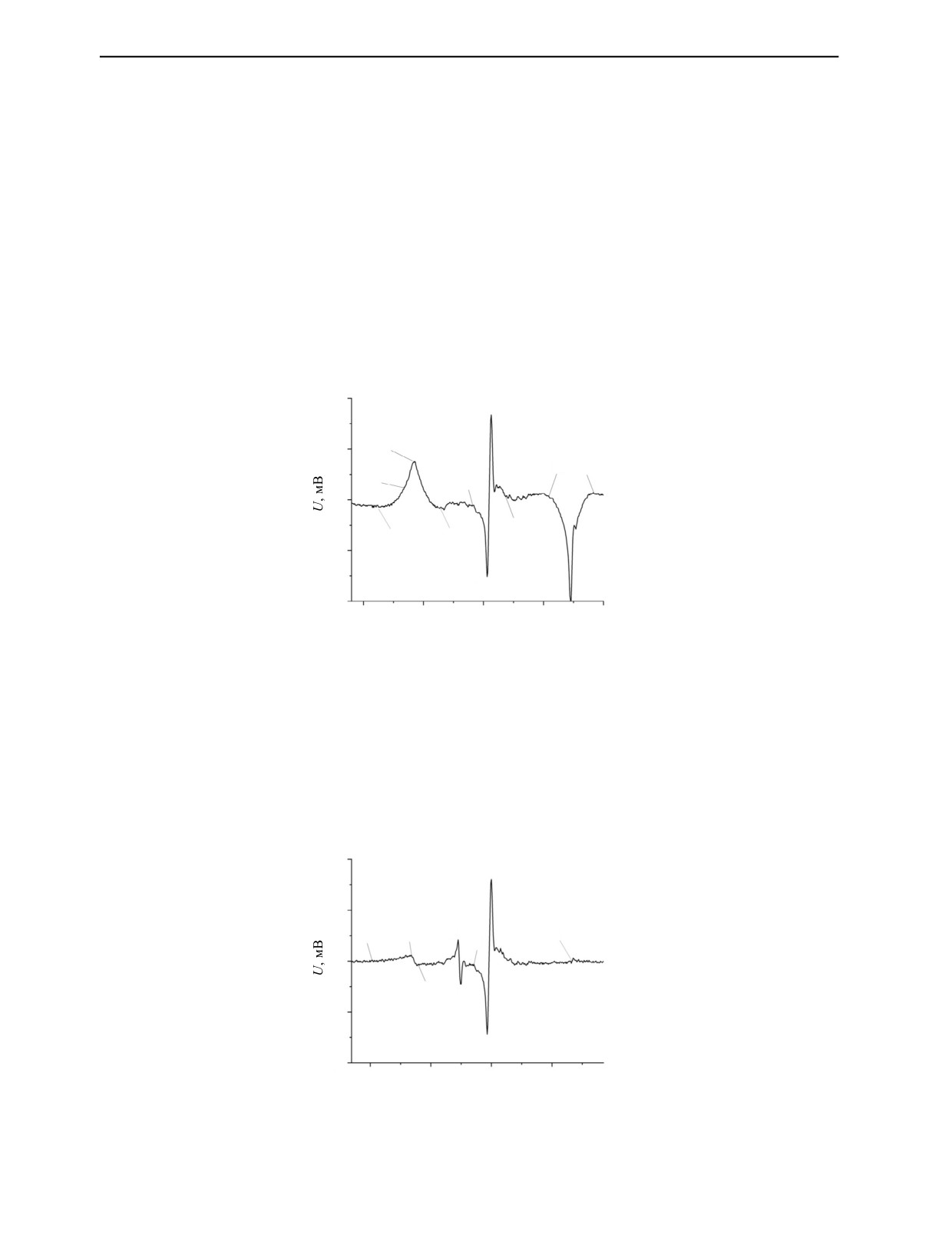
Авторами обнаружено самовозбуждение используемой измерительной системы. Его влияние
на результаты контроля пояснено графиками на рис. 2, где показана зависимость U(t), снимаемого
с МГ, сканирующей участок МН длиной 32 и 12 мм с пиками сигналов от краев МН и резонанс-
ными пиками сигнала. Резонансные пики являются следствием самовозбуждения измерительной
системы, включающей МГ. Эти пики возникают при приближении частоты локальных изменений
U(t) к частоте собственных колебаний этой измерительной системы.
3
40
2
1
5
4
5
4
20
0
5
-20
5
3
4
3
4
-40
1
2
3
4
t, мс
Рис. 2. Зависимости U(t), снимаемого с МГ, сканирующей участок МН длиной:
1 — 32 мм, 2 — 12 мм; 3 — пики сигналов от краев МН; 4 — вторые резонансные пики; 5 — первые резонансные пики.
В результате корректировки величины активного и реактивного сопротивлений в контуре,
содержащим МГ, получили зависимости 1 и 2 на рис. 2, соответствующие зависимостям 1 и 3 на
рис. 1. На нисходящих ветвях пиковых участков этих зависимостей U(t) появились дополнитель-
ные пики сигнала, то есть в контуре измерительной системы возникли свободные затухающие
гармонические колебания. Из сопоставления указанных зависимостей U(t) на рис. 1 и рис. 2 видно,
что практически незаметному резонансному пику 5 кривой 1 на рис. 1 соответствует пик 4 кривой
1 на рис. 2, а резонансному пику 5 кривой 3 на рис.1 соответствует резонансный пик 4 (см. рис. 2)
значительно большей величины. В случае самовозбуждения возникли также первые резонансные
пики 5 (см. рис. 2), являющиеся продолжением нисходящих ветвей сигнала. Нами установлено,
что резонансные пики могут возникать на задних фронтах любых одиночных сигналов достаточ-
ной величины, длительность заднего фронта которых составляет порядка четверти периода соб-
ственных колебаний контура.
Примером этого могут служить пики (2,05 мс; -5,94 мВ; 2,08 мс; 3,75 мВ; 2,13 мс; -8,75 мВ;
2,16 мс; -2,81 мВ; 2,22 мс; -10,94 мВ; 2,24 мс; -8,13 мВ) зависимости 2 на рис. 2. Локальные откло-
нения, соответствующие указанным пикам, видны уже на рис. 1, зависимость 3.
Дефектоскопия
№ 8
2021
54
В.В. Павлюченко, Е.С. Дорошевич
Таким образом, для того чтобы не возникали дополнительные погрешности измерений следует
найти такое соотношение индуктивных и активных сопротивлений в контуре измерительной
системы, при которых не происходит ее самовозбуждение. При этом следует отметить, что чув-
ствительность данной измерительной системы является максимальной именно вблизи ее резо-
нансной частоты и с удалением от нее чувствительность падает.
С целью повышения точности измерений разработали способы уменьшения дифференциаль-
ного фона путем использования эталонного дифференциального фона. Для этого изготовили дат-
чик из магнитного носителя с дефектом в нем в виде полосы с полностью удаленным рабочим
слоем. Намагнитили этот участок полем известного источника, считали с него информацию с
помощью МГ и получили зависимость U(t) 1 дифференциального фона, изображенную на рис. 3.
На этом рисунке показаны также минимумы сигнала 2, 7, 8, пики сигнала от краев датчика 3 и 4 и
пики сигнала поля дефекта 5 и 6. Расстояние от МГ до рабочего слоя датчика МН составляет
0,16 мм, а над передним краем датчика оно равно 0,3 мм. Ширину дефекта МН нашли по времен-
ным координатам пиков 5 (4,06 мс) и 6 (4,13 мс) с преобразованием в зависимость величины сиг-
нала от пространственной координаты x и получили величину, равную 0,77 мм.
40
6
20
3
10
11
1
9
0
2
7
8
–20
5
4
-40
2
3
4
5
6
t, мс
Рис. 3. Зависимость U(t) 1 дифференциального фона; 2, 7, 8, 9, 10, 11 — минимумы и максимумы сигнала; 3 и 4 — пики
сигнала от краев МН; 5 и 6 — пики сигнала дефекта МН.
Изготовили второй датчик из такого же магнитного носителя, создали в нем дефект в виде
полосы с частично удаленным рабочим слоем. Намагнитили этот датчик в таком же поле, как и
первый, но с противоположным направлением напряженности. Совместили оба датчика друг с
другом вплотную рабочими слоями, намагниченными противоположно, считали записанную на
них информацию с помощью МГ и получили разностную зависимость U(t) 1 дифференциально-
го фона, изображенную на рис. 4. Здесь также показаны пик от ближнего края датчиков 2, пики
40
6
20
1
2
3
9
8
0
4
7
–20
5
-40
1
2
3
4
t, мс
Рис. 4. Разностная зависимость U(t) 1 дифференциального фона; 2 — пик от ближнего края датчиков; 3, 4, 5, 6 — пики
сигналов двух дефектов МН; 7 и 8 — максимумы и минимумы сигнала; 9 — координата краев датчиков.
Дефектоскопия
№ 8
2021
Дифференциальный фон электрического сигнала, снимаемого с индукционной...
55
сигнала поля дефекта с частично удаленным рабочим слоем 3 и 4, пики сигнала поля дефекта с
полностью удаленным рабочим слоем 5 и 6, максимумы и минимумы разностного сигнала 7 и 8.
Здесь же показана точка 9, соответствующая координате дальних краев совмещенных датчиков.
По координатам пиков сигналов дефектов 3 (2,45 мс) и 4 (2,49 мс) нашли, что ширина полосы
с частично удаленным рабочим слоем равна 0,44 мм.
Из рис. 4 следует, что фон сигнала на рис. 3 почти полностью скомпенсирован фоном второго
датчика. Так, вместо пика сигнала дефекта 4 (5,45 мс; -39,68 мВ) на рис. 3 получена соответству-
ющая ему точка 9 (4,31 мс; 0 мВ) на рис. 4, где случайным образом скомпенсированы также
локальные сигналы помех, составляющие около 0,9 мВ. Вместе с тем пик 3 (2,83 мс; 0,015 мВ) от
ближнего края датчика на рис. 3 скомпенсирован не полностью. Ему соответствует пик 2 (1,67 мс;
2,19 мВ) на рис. 4. При этом образовался минимум сигнала 7 (1,77 мс; -1,88 мВ). По временным
координатам пика 2 и минимума 7 установлено, что длина первого датчика больше, чем длина
второго на 1,1 мм.
Таким образом, при совмещении двух датчиков МН удалось скомпенсировать сигналы фона,
обусловленные краями датчиков МН и ростом сигнала при движении МГ в однородном магнитном
поле МН. Однако остаются некомпенсированными локальные сигналы помех и наводок. Кроме
того, на участок датчика с дефектом в виде полностью удаленного рабочего слоя невозможно запи-
сать какую-либо информацию, а поврежденный (с частично удаленным рабочим слоем) участок
существенно искажает информацию при ее записи и считывании.
Обратим внимание также на тот факт, что при возникновении пиков сигналов от дефектов МН
(и дефектов объектов) происходит резкий спад величины электрического напряжения МГ после
прохождения ею записей полей этих дефектов на МН. Этот спад в силу инерционных свойств МГ
не может происходить мгновенно. Это означает, что дополнительно возникают зоны контроля с
пониженной чувствительностью и искажения измеряемых полей.
5
60
4
40
2
20
3
0
-20
-40
-60
1
0,0
0,5
1,0
1,5
2,0
2,5
3,0
t, мс
Рис. 5. Зависимости пиков U(t) на разных расстояниях МГ от МН:
1, 5
— от краев МН; 2, 3 и 4 — для дефектов МН шириной 0,38, 0,33 и 0,61мм.
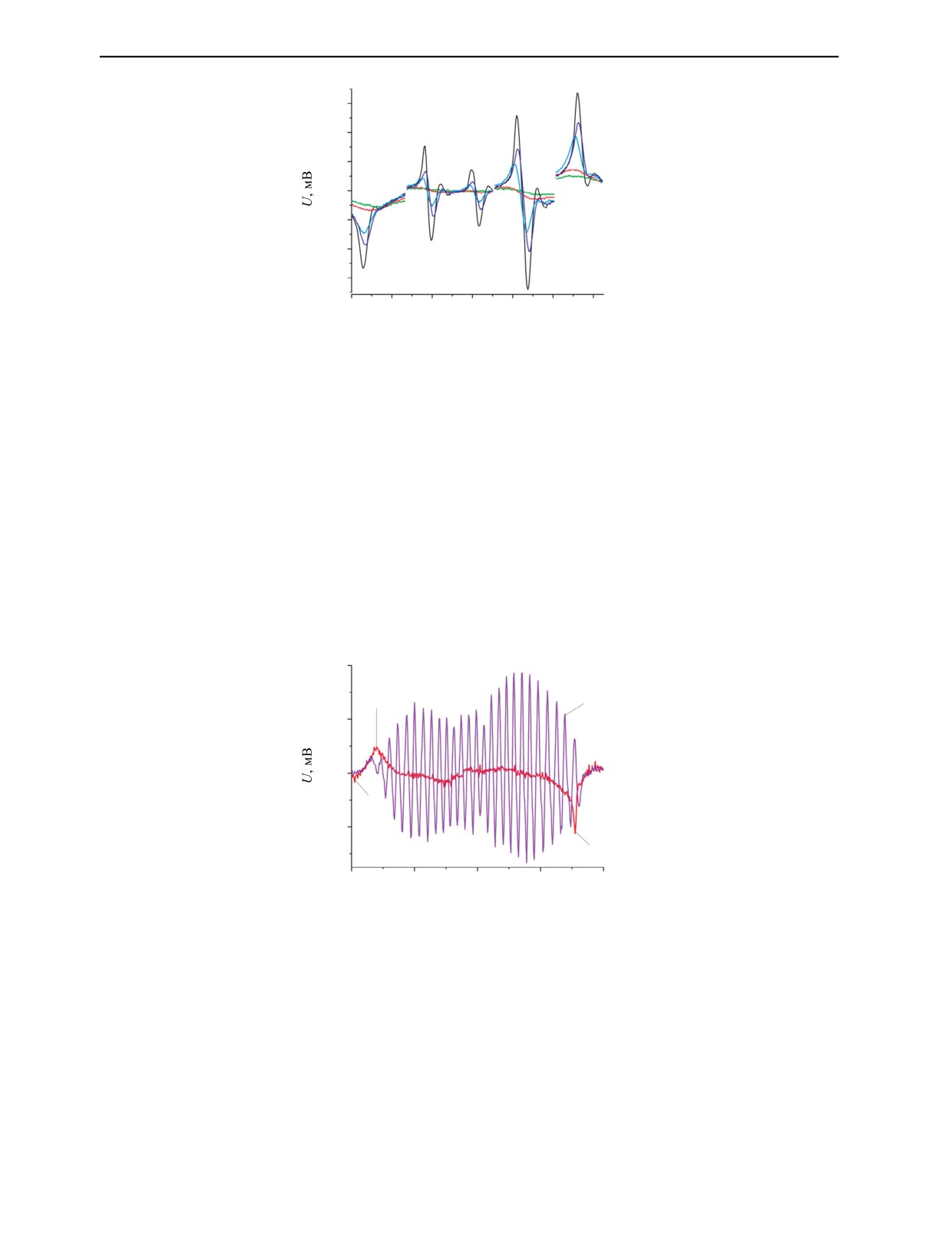
Найдены зависимости пиков U(t) дефектов МН в виде полос разной ширины с частично
поврежденным рабочим слоем на разных расстояниях МГ от МН, изображенные на рис. 5. Здесь
показана зависимость U(t), полученная на расстоянии 0,03 мм МГ от МН (с большими амплитуда-
ми пиков) и зависимость на расстоянии 1,03 мм (с меньшими амплитудами). По координатам
пиков сигналов дефектов 2 (1,04 мс и 1,075 мс), 3 (1,28 мс и 1,31 мс) и 4 (1,81 мс и 1,865 мс) нашли,
что ширина дефектов соответственно равна 0,38 мм, 0,33 мм и 0,61 мм.
Указанные зависимости в виде отдельных участков, содержащих максимумы и минимумы сиг-
налов, изображены на рис. 6. В порядке уменьшения амплитуды сигналов пиков эти зависимости
соответствуют расстояниям МГ от МН 0,03 мм, 0,013 мм, 0,23 мм, 1,03 мм и 1,53 мм. Здесь пока-
заны также резонансные пики. Исходя из анализа графиков на рис. 6 зависимость амплитуды сиг-
нала дефектов от расстояния магнитной головки до магнитного носителя может быть представле-
на обратной или экспоненциальной зависимостью.
Полученные в данной работе временные и соответствующие им пространственные зависимо-
сти величины сигнала от края МН, края дефекта и вызванные другими причинами могут быть
Дефектоскопия
№ 8
2021
56
В.В. Павлюченко, Е.С. Дорошевич
5
60
4
40
2
20
3
10
7
8
9
0
6
-20
-40
-60
1
0,0
0,2
0,4
0,6
0,8
1,0
1,2
t, мс
Рис. 6. Зависимости пиков U(t) на разных расстояниях МГ от МН:
1, 5 — от краев МН; 2, 3 и 4 — для дефектов МН шириной соответственно 0,38, 0,33 и 0,61 мм; 6, 7, 8, 9, 10 — резонансные пики.
представлены в цифровом табличном виде или описаны экспоненциальными, обратными квадра-
тичными функциями и функциями близкого к ним вида.
Покажем, что достаточно точный контроль объектов можно производить с помощью источни-
ка, формирующего неоднородное импульсное магнитное поле в плоскости измерения. Фон сигна-
ла, обусловленный неоднородностью магнитного поля локального источника, накладывается на
фоны остальных сигналов и увеличивает погрешности измерений.
На рис. 7 показан дифференциальный фон 1 плоского индуктора с максимумами сигнала 2 и
3 от краев МН. Здесь же показан интегральный фон 4 этого индуктора, полученный с помощью
индикатора в виде дискретного датчика магнитного поля (ДДМП) [5]. ДДМП состоит из полос
МН, укрепленных параллельно на тонкой гибкой диэлектрической основе на расстоянии порядка
их ширины друг от друга. Шаг используемого ДДМП составляет 1,18 мм и соответствует рассто-
янию между соседними пиками одной полярности на рис. 7.
40
2
4
20
0
1
-20
3
0
1
2
3
4
t, мс
Рис. 7. Фон плоского индуктора:
1 — дифференциальный; 4 — интегральный; 2 и 3 — максимумы сигнала от краев МН.
Размеры плоского индуктора составляют 4,5×4,0 см, плотность намотки индуктора —
16 витков∙см-1. Измерения проведены на расстоянии 3,3 мм от плоскости магнитного носителя.
Неоднородность фона локального источника обусловлена конечностью его размеров, разной плот-
ностью намотки, влиянием остальных сторон контура индуктора и другими факторами. С помо-
щью ДДМП определяли абсолютную величину напряженности магнитного поля. Максимальной
величине электрического напряжения 75 мВ ДДМП соответствует напряженность магнитного
поля порядка 180 А/см, а величине электрического напряжения 40 мВ — напряженность магнит-
ного поля около 150 А/см. Таким образом, из рис. 7 следует, что максимальная неоднородность
поля источника равна примерно 17 %.
Дефектоскопия
№ 8
2021
Дифференциальный фон электрического сигнала, снимаемого с индукционной...
57
30
5
20
7
10
1, 2
2
0
1
3
6
–10
4
1
2
3
4
5
t, мс
Рис. 8. Зависимости U(t):
1 — с сигналом дефекта; 2 — без сигнала дефекта; 3 и 4 — сигналы от краев МН; 5 и 6 — пики сигналов дефекта; 7 — пик сигнала
края дополнительной пластины из алюминия.
Разработанные нами методы гистерезисной интерференции [5—7, 15, 16] позволяют значи-
тельно уменьшить влияние неоднородности поля источника и других отрицательных факторов на
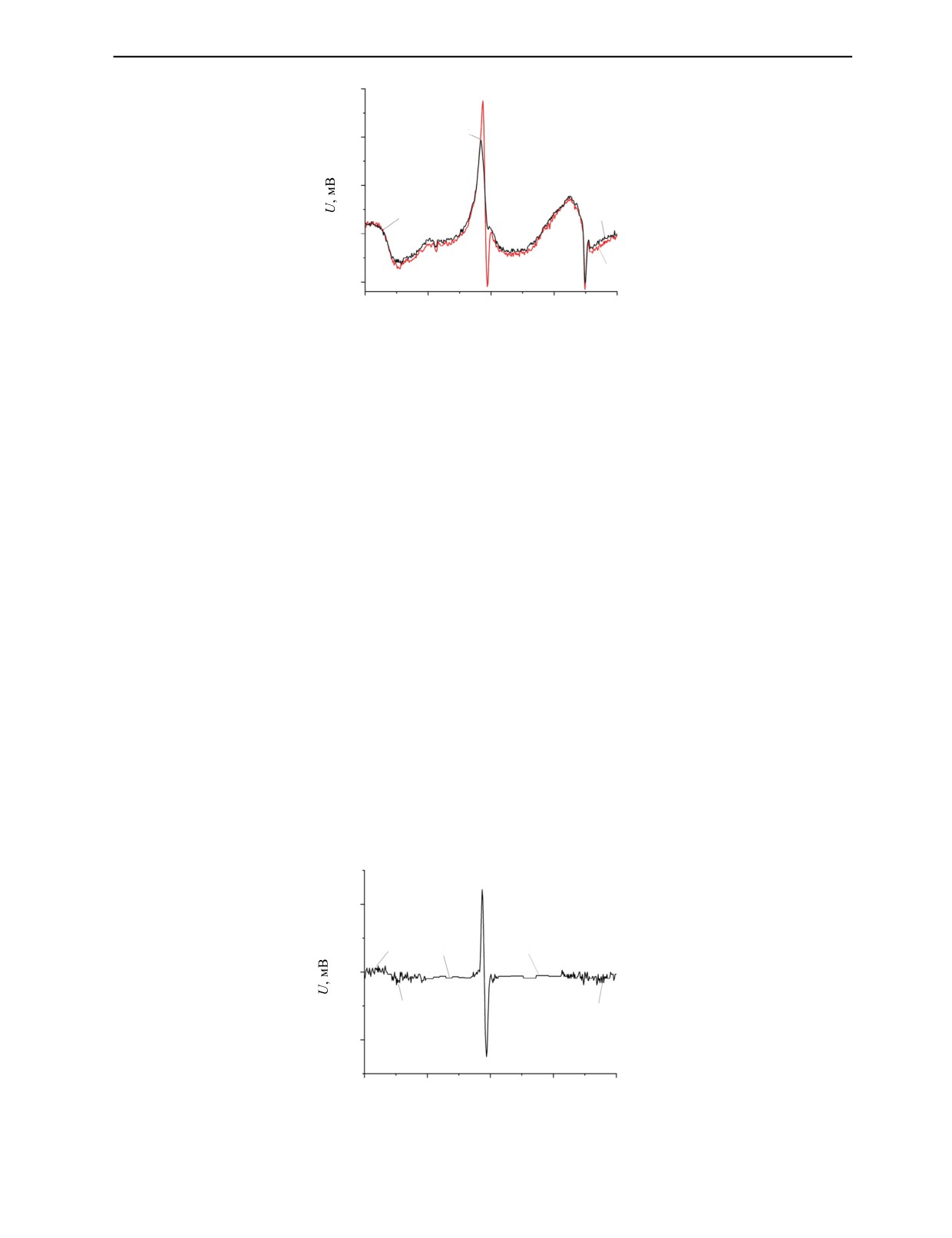
результаты контроля. Покажем, что с помощью указанного источника неоднородного поля с при-
менением гистерезисных методов можно достаточно точно определять параметры дефектов
металлических объектов. Зависимости электрического напряжения от времени U(t), снимаемого с
индукционной магнитной головки, сканирующей магнитный носитель с записями магнитных
полей, полученные для участков образца из алюминия с дефектом и без дефекта показаны на
рис. 8. Образец представлял собой алюминиевую пластину толщиной 0,06 мм с дефектом в виде
отверстия диаметром 0,8 мм. На пластину наложена алюминиевая фольга толщиной 0,015 мм. Под
указанной пластиной была установлена дополнительная пластина из алюминия толщиной 0,06 мм,
не перекрывающая дефект. Край этой пластины был расположен на расстоянии около 0,8 мм от оси
дефекта. Такие параметры образца выбраны для того, чтобы определить возможности данного
метода при контроле перекрывающих друг друга сигналов полей дефектов и неоднородностей
объекта. При этом выбран один из наиболее трудных вариантов, при котором сигнал поля дефекта
и сигнал края дополнительной пластины сравнимы по величине.
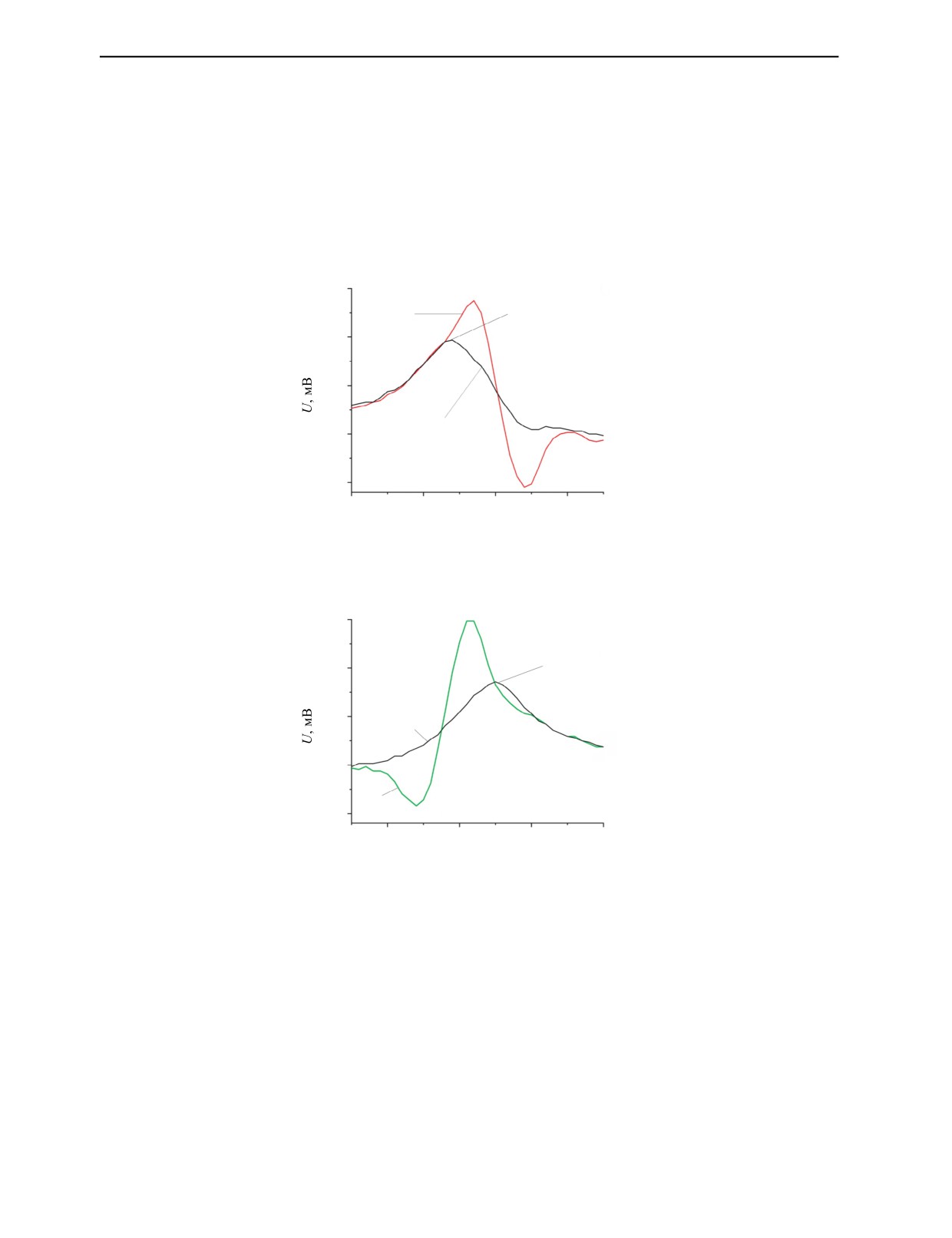
На рис. 8 изображена зависимость U(t) 1 с сигналом дефекта и сигналом края дополнительной
пластины. Здесь же показана зависимость 2 с сигналом края дополнительной пластины и не содер-
жащая сигнал дефекта. Зависимость 2 является эталонной зависимостью. На рис. 8 также показа-
ны сигналы краев МН 3 и 4, пики сигналов дефекта 5 и 6 и пик сигнала края дополнительной
пластины из алюминия 7.
На рис. 9 показана зависимость 1, являющаяся разностью зависимостей U(t) 1 и 2, представ-
ленных на рис. 8. Здесь же изображен фон 2, создаваемый сетевыми, приборными, эфирными и
другими помехами, а также пики выделенного дефекта 3 и 4 и участки U(t) с усредненными
3
10
1
5
6
0
2
2
-10
4
1
2
3
4
5
t, мс
Рис. 9. Разностная зависимость U(t):
1, 2 — фон помех; 3 и 4 — пики дефекта; 5 и 6 — участки U(t) с усредненными значениями сигнала.
Дефектоскопия
№ 8
2021
58
В.В. Павлюченко, Е.С. Дорошевич
значениями сигнала 5 и 6 соответственно по 10 и 20 точкам зависимостей. Этот фон зависит
также от класса обработки поверхности объекта, параметров царапин, шероховатостей и других
поверхностных микроскопических неоднородностей материала объекта.
Перечисленные факторы создают частотный спектр фона помех и наводок. В данном случае
диапазон этого спектра начинается со времени дискретизации измерений цифрового осциллографа
10 мкс и заканчивается согласно параметрам зависимости 1 на рис. 9 величиной порядка 200 мкс.
Выделить более точно временные координаты дефекта и края дополнительной пластины, а
также наложение сигналов дефекта и края дополнительной пластины можно с использованием
графиков на рис. 10 и рис. 11.
30
3
1
5
20
10
2
0
-10
4
2,7
2,8
2,9
3,0
t, мс
Рис. 10. Прямые зависимости U(t):
1 — с сигналом дефекта; 2 — без сигнала дефекта; 3 и 4 — пики сигналов дефекта; 5 — пик сигнала края дополнительной пластины.
30
4
20
5
10
2
0
1
-10
3
1,4
1,5
1,6
1,7
t, мс
Рис. 11. Обратные зависимости U(t):
1 — с сигналом дефекта; 2 — без сигнала дефекта; 3 и 4 — пики сигналов дефекта; 5 — пик сигнала края дополнительной пластины.
Здесь прямые зависимости получены при сканировании МН магнитной головкой в направле-
нии от края дополнительной пластины к дефекту (как на рис. 8), а обратные — в противоположном
направлении. Из рис. 9 находим временные координаты дефекта и отрезок времени между макси-
мумом 3 и минимумом 4, равный 70 мкс, что соответствует диаметру дефекта около 0,08 мм.
Отсюда следует, что временные параметры дефекта находятся внутри найденного частотного
спектра фона.
Таким образом, выявлен и исследован фон сигнала, обусловленный неоднородностью магнит-
ного поля локального источника, фоны протяженных и локальных дефектов и структурных неод-
нородностей МН и объекта, эфирный электромагнитный фон. Так, фон сигнала дефекта МН ока-
зывает двойное влияние на полезный сигнал. Во-первых, не осуществляется в полной мере запись
поля и воспроизведение сигнала объекта на дефектном участке МН. Во-вторых, происходит
Дефектоскопия
№ 8
2021
Дифференциальный фон электрического сигнала, снимаемого с индукционной...
59
искажение сигнала объекта: резкий спад уровня сигнала на переднем крае дефектного участка и
скачек с обратным выбросом на задней границе дефектного и бездефектного участков МН.
В случайные искажения фона сигнала вносят вклад погрешности считывания информации
магнитной головкой. Изображенный на рис. 9 фон 2, создаваемый сетевыми, приборными, эфир-
ными и другими помехами, содержит также сигналы помех, создаваемых нарушениями контакта
МГ и МН, локальным физическим износом МН, искажениями, вносимыми контактным коллектор-
ным съемом напряжения с вращающейся МГ или локальными нелинейными искажениями сигнала
при трансформаторном съеме. Ввиду того, что этот фон зависит также от класса обработки поверх-
ности объекта, царапин, шероховатостей и других поверхностных микроскопических неоднород-
ностей материала объекта, его следует сравнивать с оптическим изображением поверхности объ-
екта, содержащим в объемном виде всю геометрию поверхности.
Анализ графиков, изображенных на рис. 1—7, позволил выявить и исследовать резонансные
фоны самовозбуждения измерительной системы на сигналах краев МН, дефектов МН, приборных
и сетевых наводок и помех, дефектов объекта, эфирных электромагнитных полей.
Выявлены и исследованы многопараметровые фоны при наложении сигналов разного проис-
хождения (краев МН, неоднородностей МН, локальных дефектов и неоднородностей объекта,
приборный и сетевой фон электрических наводок и помех, эфирный электромагнитный фон).
В качестве примера представлено наложение и выделение сигналов локального дефекта сплош-
ности и неоднородности объекта в виде его утолщения (см. рис. 8—11).
Установлены закономерности изменения параметров переднего и заднего фронтов сигналов
фона разного рода. Временные (пространственные) зависимости сигнала края МН, края дефекта и
вызванные другими причинами представлены в цифровом табличном виде и могут быть описаны
экспоненциальными, обратными квадратичными функциями и функциями близкого к ним вида.
Найден частотный спектр фона помех используемой измерительной системы. Диапазон этого
спектра составляет 10 — 200 мкс. При этом линейная скорость движения МГ относительно МН
равна 11 м/с. Установка с такими параметрами позволяет выявлять поверхностные дефекты,
например, царапины, шириной от 0,005 мм.
При контроле свойств объектов должен быть учтен также фон сигнала, создаваемый формой
поверхности объекта, в том числе, валиком сварного шва объектов, изготовленных как из ферро-
магнитных, так и диамагнитных и парамагнитных металлов.
Найдена резонансная частота используемой измерительной системы. Согласно зависимостям
1 и 2, на рис. 2 она составляет порядка 12 кГц. Величина пиков 3 на рис. 2 (на рисунке они огра-
ничены масштабом изображения) более чем на 15 % превосходит величину пиков 4 на рис. 1,
полученных на большем удалении рабочего диапазона измерительной системы от резонансной
частоты. Для повышения чувствительности и точности контроля следует устанавливать параме-
тры электрических элементов систем измерения на пороге возникновения в ней свободных коле-
баний. Проведенные исследования полученного дифференциального фона электрического сигнала
позволяют совместно с разработанными авторами ранее методами гистерезисной интерференции
в импульсных магнитных полях [5, 7, 15, 16] вести контроль свойств объектов в автоматическом
режиме с программным управлением, что значительно повышает чувствительность и точность
контроля.
ВЫВОДЫ
Проведен анализ составляющих фона электрического сигнала, снимаемого с магнитной голов-
ки. Выявлены и исследованы следующие фоны U(t): намагниченного магнитного носителя, его
краев, локальных дефектов МН (локальных изломов, потертостей, мятых участков МН, поврежде-
ний рабочего слоя).
Выявлен и исследован фон сигнала, обусловленный неоднородностью магнитного поля
локального источника, фоны протяженных и локальных дефектов и структурных неоднородностей
объекта, эфирный электромагнитный фон.
Выявлены и исследованы резонансные фоны самовозбуждения измерительной системы на
сигналах краев МН, дефектов МН, приборных и сетевых наводок и помех, дефектов объекта,
эфирных электромагнитных полей.
Выявлены и исследованы многопараметровые фоны при наложении и выделении сигналов
разного происхождения (краев МН, неоднородностей МН, локальных дефектов и неоднородно-
стей объекта, приборный и сетевой фон электрических наводок и помех, эфирный электромаг-
нитный фон).
Дефектоскопия
№ 8
2021
60
В.В. Павлюченко, Е.С. Дорошевич
Установлены закономерности изменения параметров переднего и заднего фронтов сигналов
фона разного рода. Временные (пространственные) зависимости сигнала края МН, края дефекта
и вызванные другими причинами представлены в цифровом табличном виде и могут быть опи-
саны экспоненциальными, обратными квадратичными функциями и функциями близкого к ним
вида.
Показано, что резонансные пики являются следствием самовозбуждения измерительной систе-
мы, включающей МГ. Эти пики возникают при приближении частоты локальных изменений U(t)
к частоте собственных колебаний этой измерительной системы. Путем корректировки активных и
реактивных сопротивлений в контуре, содержащим МГ, получены свободные гармонические коле-
бания на нисходящих ветвях пиковых участков U(t) с разной амплитудой и коэффициентом зату-
хания. При этом возникли также первые резонансные пики, являющиеся продолжением нисходя-
щих ветвей пиков сигнала. Установлено, что резонансные пики возникают на задних фронтах
любых сигналов достаточной величины, длительность заднего фронта которых составляет поряд-
ка четверти периода собственных колебаний измерительной системы.
Получены временные зависимости величины сигнала дефектов объекта и дефектов МН, сни-
маемого с МГ, на разных расстояниях МГ до магнитного носителя, учет которых позволяет повы-
сить точность контроля.
При контроле свойств объектов должен быть учтен также фон сигнала, создаваемый формой
поверхности объекта, в том числе, валиком сварного шва объектов, изготовленных как из ферро-
магнитных, так и диамагнитных и парамагнитных металлов.
Найден частотный спектр фона помех используемой измерительной системы. Диапазон этого
спектра начинается со времени дискретизации измерений используемого цифрового осциллографа
10 мкс и заканчивается согласно параметрам представленных экспериментальных зависимостей
величиной порядка 200 мкс. Указанный фон содержит также сигналы помех, создаваемых нару-
шением контакта МГ и МН, локальным физическим износом МН, искажениями, вносимыми кон-
тактным коллекторным съемом напряжения с вращающейся МГ или локальными нелинейными
искажениями сигнала при трансформаторном съеме. Этот фон зависит также от класса обработки
поверхности объекта, параметров царапин, шероховатостей и других поверхностных микроскопи-
ческих неоднородностей материала объекта и его следует сравнивать с оптическим изображением
поверхности объекта.
Установлено, что в промежутке между пиками, соответствующими краям участков МН, уча-
сток зависимости U(t) является отрезком горизонтальной прямой, а с увеличением амплитуды
сигнала угол его наклона к горизонту растет и на этом отрезке появляются минимумы и максиму-
мы сигнала. С увеличением амплитуды воздействующего магнитного поля величина этих макси-
мумов и минимумов растет и достигает величины пиковых значений сигнала от краев МН.
Найдена резонансная частота используемой измерительной системы. Для повышения чувстви-
тельности и точности контроля рекомендовано устанавливать такие параметры электрических
элементов систем измерения, которые выводят измерительную систему в состояние, близкое к
состоянию возбуждения в ней свободных колебаний.
Проведенные исследования полученного дифференциального фона электрического сигнала,
снимаемого с индукционной магнитной головки, позволяют совместно с найденными авторами
ранее амплитудными и частотными спектрами импульсных магнитных полей при осуществлении
гистерезисной интерференции вести контроль свойств объектов в автоматическом режиме с про-
граммным управлением, что значительно повышает чувствительность и точность контроля.
СПИСОК ЛИТЕРАТУРЫ
1. Козлов В.С. Техника магнитографической дефектоскопии. Мн.: Вышэйшая школа, 1976.
256 с.
2. Михайлов С.П., Щербинин В.Е. Физические основы магнитографической дефектоскопии. М.:
Наука, 1992. 238 с.
3. Жданов А.Г., Щукис Е.Г., Лунин В.П., Столяров А.А. Алгоритмы предварительной обработки
вихретоковых сигналов при контроле теплообменных труб парогенераторов АЭС // Дефектоскопия.
2018. № 4. С. 54—64.
4. Суханов Д.Я., Гончарик М.А. Определение формы электропроводящего объекта по дистанцион-
ным измерениям возмущений переменного магнитного поля // Известия высших учебных заведений.
Физика. 2013. Т. 56. № 8/2. С. 41—43.
5. Pavlyuchenko V.V., Doroshevich E.S. Using magnetic hysteresis for testing electroconductive objects in
pulsed magnetic fields // Russ. J. Nondetsr. Test. 2013. V. 49. No. 6. P. 334—346.
Дефектоскопия
№ 8
2021
Дифференциальный фон электрического сигнала, снимаемого с индукционной...
61
С. 28—32.
7. Pavlyuchenko V.V., Doroshevich E.S., Pivovarov V.L. Computer-assisted methods for finding pulsed
magnetic-field distributions near current-conducting objects // Russian Journal of Nondestructive Testing.
2016. V. 52. No. 3.P. 166—174.
8. Новослугина А.П., Смородинский Я.Г. Анализ топографии магнитных полей рассеяния в ферро-
магнитных изделиях
// Заводская лаборатория. Диагностика материалов.
2021. Т.
87.
№ 2.
С. 33—37.
9. Черепанов А.А., Кротов Л.Н., Кротова Е.Л. Математическое моделирование определения гео-
метрических параметров внутренних дефектов различных форм методом магнитной дефектоскопии //
Перспективы науки. 2013. № 12 (51). С. 60—63.
10. Крапивский Е.И., Абакумов А.А., Венков Ю.А. Экспериментальное исследование магнитного
поля рассеяния от дефектов трубопровода
// Газовая промышленность.
2015.
№ 2 (718).
С. 64—66.
11. Дякин В.В., Кудряшова О.В., Раевский В.Я. Поле рассеяния пластины с поверхностным дефек-
том в однородном внешнем поле // Дефектоскопия. 2018. № 12. С. 22—29. [Dyakin V.V., Kudryashova O.V.
Stray Field of Plate with a Surface Defect in a Homogeneous External Field // Russian Journal of Nondestructive
Testing. 2018. V. 54. No. 12. P. 840—848.]
12. Гальченко В.Я., Остапущенко Д.Л., Воробьев М.А. Компьютерный анализ конфигурации маг-
нитных полей поверхностных дефектов сплошности конечных размеров в ферромагнитной пластине
ограниченной протяженности методом пространственных интегральных уравнений // Дефектоскопия.
2009. № 3. С. 56—66.
13. Новиков В.А., Терешко А.М. Применение постоянных магнитов для магнитографической дефек-
тоскопии изделий // Дефектоскопия. 1998. № 7. С. 67—71.
14. Новослугина А.П., Смородинский Я.Г. Расчетный способ оценки параметров дефектов в сталях
// Дефектоскопия. 2017. № 11. С. 13—19.
15. Pavlyuchenko V.V., Doroshevich E.S. Hysteretic Interference of Time-Overlapping Magnetic Field
Pulses // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 12. P. 949—956.
16. Pavlyuchenko V.V., Doroshevich E.S. Imaging Electric Signals of a Magnetic Field Transducer with
Hysteretic Interference for Testing Metals in Pulsed Magnetic Fields // Russian Journal of Nondestructive
Testing. 2020. V. 56. No. 11. P. 907—914.
Дефектоскопия
№ 8
2021