УДК 620.179.162
ЦИФРОВАЯ КОГЕРЕНТНАЯ ОБРАБОТКА СИГНАЛОВ С РАСЧЕТАМИ
В ЧАСТОТНОЙ ОБЛАСТИ ДЛЯ РЕШЕНИЯ ЗАДАЧ УЛЬТРАЗВУКОВОЙ
ТОМОГРАФИИ С ПРИМЕНЕНИЕМ МАТРИЧНЫХ АНТЕННЫХ РЕШЕТОК
С НЕЭКВИДИСТАНТНЫМ РАСПОЛОЖЕНИЕМ ЭЛЕМЕНТОВ
© 2022 г. Д.О. Долматов1,*, Н.И. Ермошин1,**
1Национальный исследовательский Томский политехнический университет,
Россия 634040 Томск, пр-т Ленина, 30
E-mail: *dolmatovdo@tpu.ru;**nikvan@tpu.ru
Поступила в редакцию 27.07.2022; после доработки 16.08.2022
Принято к публикации 23.08.2022
Задача повышения скорости восстановления изображений дефектов является актуальной проблемой развития про-
мышленной ультразвуковой томографии на основе цифровой когерентной обработки сигналов матричных антенных
решеток (АР). В контексте указанной проблемы в рамках данной работы рассмотрено совместное использование вычис-
лительно-эффективных алгоритмов с расчетами в частотной области и матричных АР с неэквидитсантным расположе-
нием элементов. Совместное применение указанных подходов по повышению скорости получения результатов обеспе-
чивается за счет применения алгоритма цифровой когерентной обработки на основе неэквидистантного быстрого пре-
образования Фурье (НБПФ). Эффективность данного алгоритма была подтверждена экспериментально.
Ключевые слова: ультразвуковой неразрушающий контроль, ультразвуковая томография, алгоритмы цифровой коге-
рентной обработки с расчетами в частотной области, неэквидистантное быстрое преобразование Фурье, матричные
антенные решетки с неэквидистантным расположением элементов.
DOI: 10.31857/S0130308222100025, EDN: BSWHQC
ВВЕДЕНИЕ
На сегодняшний день ультразвуковая томография с применением цифровой когерентной обра-
ботки сигналов АР на основе метода синтезированной апертуры находит все большее применение
в практике ультразвукового неразрушающего контроля. Такие технологии как Цифровая фокуси-
ровка антенной [1, 2] и Total Focusing Method [3], базирующиеся на подобном подходе, реализуют-
ся во все большем количестве современных моделей ультразвуковых дефектоскопов на АР [4―7].
Указанная тенденция обусловлена тем фактом, что применение АР в качестве преобразователя в
совокупности с цифровой когерентной обработкой сигналов, обеспечивает возможность получе-
ния результатов контроля в форме изображений дефектов высокого разрешения, по которым пред-
ставляется возможным с высокой точностью оценить параметры выявленных несплошностей.
В общем случае дефекты являются объемными и ориентированы в объектах контроля слу-
чайным образом, поэтому трехмерные изображения являются наиболее предпочтительной фор-
мой получения результатов в ультразвуковой томографии [8]. В этой связи в рамках задачи оценки
параметров дефектов большой интерес представляет использование матричных АР. Применение
подобных преобразователей способно обеспечить получение трехмерных результатов высокого
разрешения как в одной измерительной позиции, так и при сканировании, но связано с необхо-
димостью цифровой когерентной обработки значительного объема ультразвуковых сигналов. Это
приводит к низкой скорости получения результатов, что прямым образом сказывается на произ-
водительности контроля. Таким образом, актуальным вопросом более широкого применения ма-
тричных АР в совокупности с цифровой когерентной обработкой сигналов является разработка
подходов, обеспечивающих высокую скорость получения результатов.
Для повышения скорости получения трехмерных изображений при применении трехмерной
когерентной обработки сигналов матричных АР могут быть применены два принципиальных под-
хода. Первый подход заключается в получении оптимизированного набора сигналов подлежащих
цифровой когерентной обработке, что обеспечивается применением разреженных преобразовате-
лей и преобразователей с неэквидистантным расположением элементов [9―14]. Второй подход
заключается в разработке и использовании вычислительно-эффективных алгоритмов цифровой ко-
герентной обработки, обеспечивающих высокую скорость восстановления изображений дефектов
высокого качества. В рамках данного подхода большой интерес представляет применение алгорит-
мов цифровой когерентной обработки с расчетами в частотной области, которые показали более
высокую скорость получения результатов по сравнению с широко применяемыми алгоритмами
14
Д.О. Долматов, Н.И. Ермошин
с расчетами во временной области при использовании одноэлементных преобразователей [15], ли-
нейных [16] и матричных [17] АР. Алгоритмы с расчетами в частотной области базируются на при-
менении алгоритма быстрого преобразования Фурье, который подразумевает, что данные заданы
на равномерной сетке. Тем не менее применение разреженных преобразователей и преобразова-
телей с неэквидистантным расположением элементов подразумевает необходимость когерентной
обработки сигналов, заданных на сетке с непостоянным шагом. Таким образом, в данной работе
рассматривается совместное использование алгоритмов с расчетами в частотной области и пре-
образователей с неэквидистантным расположением элементов за счет реализации вычислений в
рамках алгоритма на основе использования НБПФ [18].
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЯ
Антенные решетки с неэквидистантным расположением элементов в форме диска Пуас-
сона. В ультразвуковой дефектоскопии с АР стандартным подходом является использование пре-
образователей с постоянным шагом (АР с эквидистантным расположением элементов). При этом
требуемый шаг подобной решетки (h) определяется в соответствии со следующим критерием:
h ≤ λ /2,
(1)
где λ — длина ультразвуковой волны в объекте контроля [19].
Применение специальных режимов сбора данных направлено на восстановление изображе-
ний высокого качества при меньшем по сравнению со стандартным подходом набором сигналов.
Это может быть обеспечено путем ограничения числа активных элементов в АР, участвующих в
зондировании объектов контроля и приеме эхосигналов. В таком случае говорят о разреженных
АР. При этом перечень активных элементов АР, обеспечивающих получение результатов высокого
качества может меняться в зависимости от условий проведения контроля. Для поиска оптималь-
ной конфигурации АР может использоваться метод перебора, а также алгоритмы стохастической
оптимизации [20—22]. Также сбор оптимизированного набора сигналов может быть обеспечен за
счет использования преобразователей с непостоянным шагом между соседними элементами (АР
с неэквидистантным расположением элементов). В научной литературе были предложены различ-
ные конструкции преобразователей с неэквидистантным расположением элементов, включая спи-
ральные антенные решетки и преобразователи с произвольным расположением элементов [23, 24].
Необходимо отметить, что на сегодняшний день не существует общепринятого подхода к получе-
нию оптимизированного объема данных. В научной литературе отсутствует сравнительный анализ
различных подходов к определению оптимальной конфигурации разреженной АР и конструкций
АР с неэквидистантным расположением элементов.
Одним из подходов для получения оптимизированного набора сигналов является применение
преобразователя с неэквидистантным расположением элементов в форме диска Пуассона [24].
Предполагается, что при такой конфигурации элементы располагаются в произвольном порядке,
но накладывается ограничение на минимальное расстояние между ними.
Определение расположения элементов в таком преобразователе может быть осуществлено в
соответствии со следующим алгоритмом [25]:
1. Входными данными для построения конфигурации матричной АР с неэквидистантным рас-
положением элементов является параметр, определяющий размер апертуры (D), и минимально до-
пустимое расстояние между соседними элементами (r).
2. Задается сетка из точек, которая будет служить базисом для формирования конфигурации
элементов в форме диска Пуассона. При этом точки заданной сетки должны располагаться с шагом
r/
2 . Кроме того, формируется массив, который будет содержать координаты точек, в которых
будут расположены центры элементов преобразователя с неэквидистантным расположением эле-
ментов.
3. Поиск конфигурации разреженной АР является итеративным процессом. На каждой итера-
ции выбирается узел сетки xn, в окрестности которого выбирается набор точек xi. На выбор точек
накладывается следующие ограничения:
x
-
x
<2r;
n
i
(2)
x
−
x
>
r
n
i
Для каждой точки из указанного набора определяются расстояния до ранее определенных эле-
ментов матричной АР с неэквидистантным расположением элементов, положение которых опи-
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
15
сывается данными из массива. Координаты одной из точек, которая находится на расстоянии не
менее чем r от ранее определенных элементов матричной АР (если такие точки имеются в наборе),
заносятся в массив с координатами элементов матричной АР. Впоследствии выбранный узел ис-
ключается из дальнейших расчетов. Выполнение алгоритма завершается после рассмотрения всех
узлов сетки.
Реализация быстрого преобразования Фурье на нерегулярных сетках. Реализация НБПФ
первого рода подразумевает необходимость применения свертки с гауссианом, применение ал-
горитма быстрого преобразования Фурье и реализацию обратной свертки [26]. Для реализации
операции свертки, обеспечивающей высокую точность получаемых результатов, задается регу-
лярная сетка с повышенной относительно требуемой сетки частотой дискретизации. Параметры
сетки с повышенной частотой дискретизации определяются с учетом степени передискретизации
(oversampling ratio), которая является входным параметром при реализации алгоритма.
Для каждой точки (xj, yj, zj) функции f(x, y, z) определяются ближайшая точка
(ξ1, ξ2, ξ3) на регулярной сетке; при этом ξ1 < xj, ξ2 < yj, ξ3 < zj. Для каждой точки функции f(x, y, z)
рассчитываются параметры гауссианы:
2
2
2
(x
−ξ
)
+(y
−ξ
)
+(z
−ξ
)
j
1
j
2
j
3
E
1
=
exp−
;
(3)
4τ
π(x
−ξ
)
j
1
E
=
exp
;
(4)
2x
M
τ
r
π(y
−ξ
)
j
2
E
=
exp
;
(5)
2y
M
τ
r
π(z
−ξ
)
j
3
E
=
exp
;
(6)
2z
M
τ
r
2
E
(k) = expτk
,
k
< N /2,
(7)
3
где τ — параметр, определяющий ширину гауссианы; Mr — количество отсчетов в регулярной сет-
ке с повышенным шагом дискретизации; k — волновое число; N — размеры регулярной сетки, для
которой требуется получить преобразование Фурье.
Таким образом, для каждой точки (xj, yj, zj) функции f(x, y, z) рассчитывается:
V
= f
(x
,
y
, z
)
⋅E
⋅E
(n
)⋅E
(n
)⋅E
(n
);
(8)
xyz
j
j
j
1
2x
1
2y
2
2z
3
f
(m
+n
,m
+n
,m
+n
)
=
f
(m
+n
,m
+n
,m
+n
) +V
,
(9)
τ
1
1
2
2
3
3
τ
1
1
2
2
3
3
xyz
(ξ
,ξ
,ξ
)⋅M
1
2
3
r
где
n
1
=-M
sp
+1,M
sp
,
n
2
=-M
sp
+1,
M
sp
,
n
3
=-M
sp
+
1,M
sp
,
(m
1
,m
2
,m
3
)
=
2π
Параметр Msp определяет количество точек на регулярной сетке с повышенной частотой дис-
кретизации в окрестности точки (xj, yj, zj) функции f(x, y, z).
Результатом сопряжения является функция
τ
f (m
1
,m
2
,m
3
)
с регулярной сеткой, для которой с
использованием алгоритма быстрого преобразования Фурье получают фурье-образ
F (k
,k
,k
)
τ
1
2
3
Получение итогового результата обеспечивается применением операции обратной свертки:
π
F(k
1
,k
2
,k
3
)
=
⋅
E
3
(k
1
)⋅E
3
(k
2
)⋅E
3
(k
3
)⋅F(k
τ
1
,k
2
,k
3
).
(10)
τ
Алгоритм цифровой когерентной обработки сигналов АР с неэквидистантным располо-
жением элементов с расчетами в частотной области. Рассмотрим совмещенный режим работы
Дефектоскопия
№ 10
2022
16
Д.О. Долматов, Н.И. Ермошин
матричной АР. Алгоритм с расчетами в частотной области [15], обеспечивающий высокую ско-
рость восстановления изображений в случае применения иммерсионного акустического контакта
требуется адаптировать для случая трехмерной цифровой когерентной обработки на неравномер-
ной сетке, что связано с применением разреженной матричной АР или преобразователя с неэкви-
дистантным расположением элементов.
Набор сигналов, зарегистрированных матричным преобразователем, может быть описан функ-
цией P(t, x, y, z), где t — это время; x, y, z — координаты элемента матричной антенной решетки.
Необходимо отметить, что использование преобразователя с неэквидистантным расположением
элементов подразумевает, что указанная функция задана на неравномерной сетке, что приводит
к необходимости использования на первом этапе алгоритма НБПФ первого рода, реализация ко-
торого рассмотрена в формулах (3)―(10). Результатом применения НБПФ является фурье-образ
функции
p ω
k
x
,k
y
, z),
заданный на равномерной сетке:
P t,x,y,z)НБПФ→p(ω,k
x
,k
y
, z),
(11)
где ω ― угловая частота; kx, ky — компоненты волнового вектора.
Следующим шагом в рамках алгоритма является экстраполяция функции
p ω
k
,k
, z)
на гра-
x
z
ницу раздела объект контроля — иммерсионная жидкость (вода):
ik
z
∆z
p(ω,k
x
,k
y
, z
+∆z)
p
= ω
k
x
,
y
k z)
⋅e
,
(12)
где Δz ― толщина слоя иммерсионной жидкости; kz ― компонента волнового вектора.
При этом компонента волнового вектора kz в формуле (12) определяется с использованием сле-
дующего выражения:
1/2
2
ωω
2
2
k
=-
-k
−
k
,
(13)
z
2
x
y
ω
c
1
где
c ― половина скорости продольных волн в иммерсионной среде.
Получение трехмерного изображения осуществляется с применением преобразования Столта,
для чего угловая частота выражается через компоненты волнового вектора:
k
z
2
2
2
ω(k
x
,k
y
,k
z
)
=-
⋅c
2
⋅
(
k
x
+
k
y
+
k
z
)1/2
(14)
k
z
Таким образом, получение изображения реализуется через замену переменной, интерполяцию
и применение трехмерного обратного преобразования Фурье:
ПФ
P ω
k
x
,k
y
,
z + ∆z
) →P(k
x
,k
y
,
k
z
)
I x,y,z).
(15)
Экспериментальная часть. Алгоритм цифровой когерентной обработки, базирующийся на
расчетах в частотной области и рассмотренный в предыдущих разделах, был реализован в про-
граммном пакете Matlab. Входными данными для алгоритма служили наборы сигналов, полу-
ченные в результате сканирования объектов контроля. Выходным результатом работы алгоритма
являются трехмерные изображения дефектов в используемых тестовых образцах. Также с исполь-
зованием программного пакета Matlab был создан алгоритм поиска конфигурации матричной АР
с неэквидистантным расположением элементов в форме диска Пуассона. Входными параметрами
для данного алгоритма служил параметр, определяющий размер апертуры (параметр D), а также
минимально допустимое расстояние между соседними элементами (параметр r). Результатом ра-
боты данного алгоритма является набор координат, характеризующий расположение элементов в
преобразователе.
Для проверки алгоритма цифровой когерентной обработки на основе НБПФ была проведена
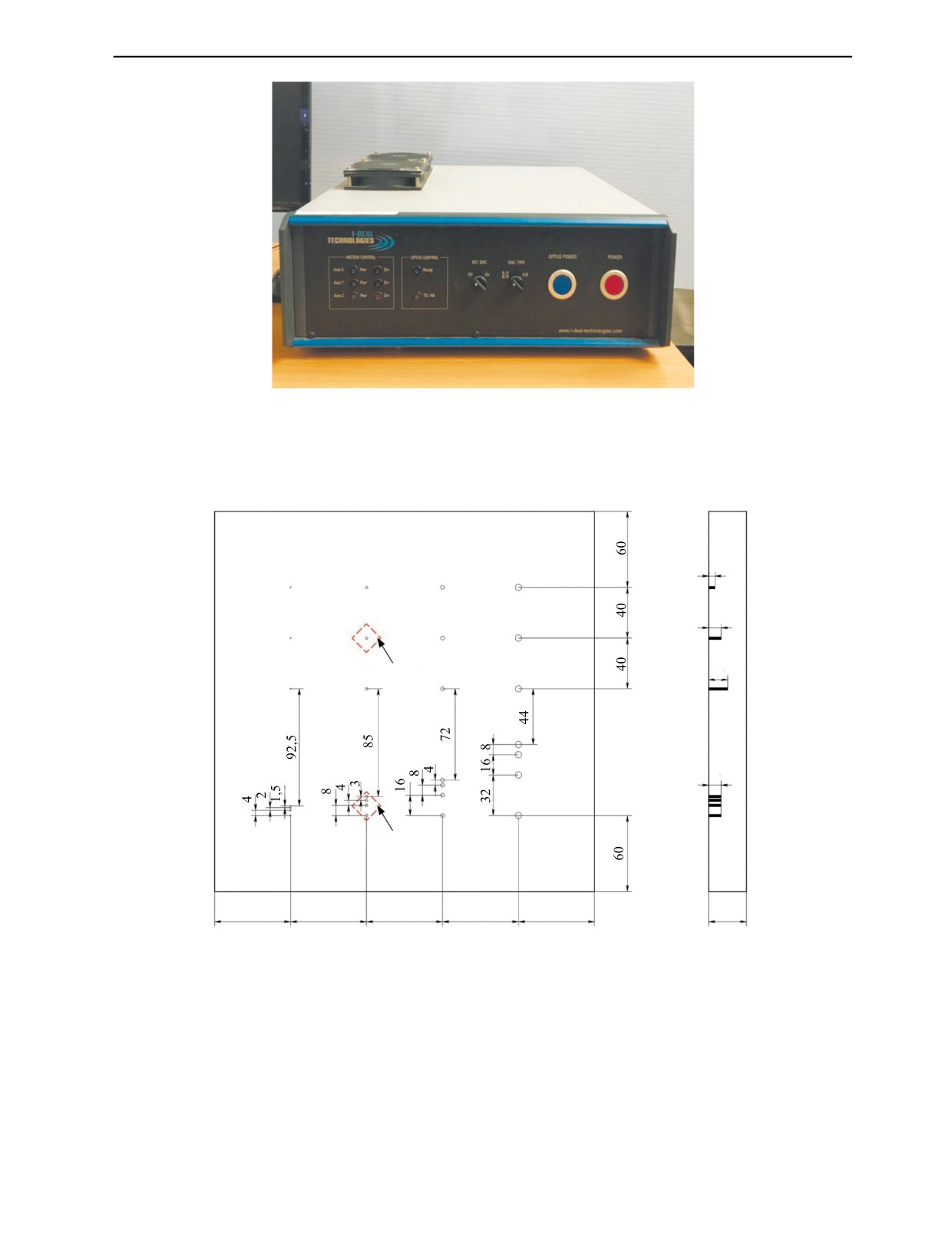
серия натурных экспериментов на экспериментальном стенде, основой которого служил блок элек-
троники OPTUS (I-Deal Technologies GmbH) (рис. 1).
Для проведения серии экспериментов использовалось два участка тестового образца, содер-
жащие плоскодонные отверстия диаметром 2 мм. Эскиз тестового образца представлен на рис. 2.
Взаимное расположение дефектов в тестовых участках представлено на рис. 3. Участок, содержа-
щий одиночный дефект (рис. 3а), предназначен для оценки разрешения и отношения сигнал/шум
(ОСШ) результатов, полученных с использованием алгоритма с расчетами в частотной области.
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
17
Рис. 1. Электронный блок OPTUS.
Дефекты
Дефекты
Дефекты
Дефекты
Дефекты
∅ 1 мм
∅ 2 мм
∅ 3 мм
∅ 5 мм
∅ 2 мм
5
10
Участок 1
15
10
Участок 2
60
60
60
60
60
30
Рис. 2. Эскиз тестового образца.
Участок с близкорасположенными дефектами (рис. 3б) был использован для подтверждения ре-
зультатов, полученных для одиночного дефекта.
В качестве преобразователя в серии экспериментов применяли матричную АР с эквидистант-
ным расположением элементов Doppler 5M8×8BP1.0 (рис. 4). Для проведения эксперименталь-
ной верификации с применением разработанного алгоритма был определен набор матричных
АР с неэквидистантным расположением элементов в форме диска Пуассона, параметры которых
представлены в табл. 1. Расположение элементов в этих преобразователях представлено на рис. 5.
Дефектоскопия
№ 10
2022
18
Д.О. Долматов, Н.И. Ермошин
а
б
Ось X, мм
Ось X, мм
Ось X, мм
Ось X, мм
Рис. 3. Взаимное расположение дефектов в выбранных участках тестового образца: участок с одиночным дефектом (а);
участок с множественными дефектами (б).
Рис. 4. Ультразвуковой преобразователь Doppler 5M8×8BP 1.0.
Таблица
1
Параметры матричных АР, имеющих неэквидистантное расположение элементов в форме диска Пуассона
№ АР
Количество элементов в АР
Параметр D, мм
Параметр r, мм
1
1153
16
0,4
2
524
16
0,6
3
297
16
0,8
4
194
16
1
5
101
16
1,4
6
51
16
2
В процессе экспериментальной верификации использовали первый элемент преобразователя (раз-
мер 0,8×0,8 мм, рабочая частота 5,41 МГц). При этом работа преобразователей с неэквидистант-
ным расположением элементов в совмещенном режиме моделировалась за счет перемещения эле-
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
19
а
б
в
Ось X, мм
Ось X, мм
Ось X, мм
г
д
е
Ось X, мм
Ось X, мм
Ось X, мм
Рис. 5. Расположение элементов матричных АР с неэквидистантным расположением элементов:
АР № 1 (а); АР № 2 (б); АР № 3 (в); АР № 4 (г); АР № 5 (д); АР № 6 (е).
мента используемой матричной АР в заданные точки пространства с использованием двухосного
манипулятора с точностью позиционирования 0,1 мм.
Наборы сигналов, полученных в результате сканирования тестовых образцов с применением
иммерсионного акустического контакта, являлись исходными данными для алгоритма цифровой
когерентной обработки на основе НБПФ. В рамках данной экспериментальной верификации вос-
станавливали трехмерные изображения размером 16×16×30 мм и разрешением 0,2 мм.
Полученные результаты оценивали по полученному разрешению, для чего использовали ве-
личину Array Performance Indicator (API) [27]. Для трехмерных изображений указанная величина
может быть рассчитана для отражателя по следующей формуле:
V-
6
дБ
API
=
,
(16)
3
λ
где V -6 дБ ― объем отражателя, в которой амплитуда синтезированного изображения выше порога
в -6 дБ от максимальной амплитуды, соответствующей этому отражателю на синтезированном
изображении.
Кроме того, оценивали ОСШ полученных результатов, что осуществляли с применением сле-
дующей формулы [28, 29]:
I
1
SNR
=
20⋅log
10
,
(17)
I
2
где I1 ― максимальная амплитуда вокселя, соответствующего отражателю на синтезированном
изображении; I2 ― максимальная амплитуда вокселя в области на синтезированном изображении,
не содержащей отражателя.
Дефектоскопия
№ 10
2022
20
Д.О. Долматов, Н.И. Ермошин
Таблица
2
Параметры матричных АР с эквидистантным расположением элементов, рассматриваемых при проведении
экспериментов
№ АР
Количество элементов в АР
Размер апертуры, мм
Шаг АР, мм
1
1600
16×16
0,4
2
729
16,2×16,2
0,6
3
400
16×16
0,8
4
256
16×16
1
5
144
16,8×16,8
1,4
6
64
16×16
2
Для оценки результатов, полученных с использованием алгоритма на основе НБПФ и АР с
неэквидистантным расположением элементов для тестового образца с одиночным отражателем,
сравнивали с изображениями дефектов, полученных с использованием стандартного подхода, ко-
торый подразумевает использование преобразователей с эквидистантным расположением элемен-
тов и применения алгоритмов с расчетами во временной области. При этом цифровую когерентную
обработку с расчетами во временной области применяли в соответствии с [30]. В рамках экспери-
ментальной верификации рассматривали АР с эквидистантным расположением элементов, пред-
ставленные в табл. 2. Моделирование работы указанных преобразователей также осуществляли за
счет перемещения элемента матричной АР с использованием двухосного манипулятора с точно-
стью позиционирования 0,1 мм.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ И ИХ ОБСУЖДЕНИЕ
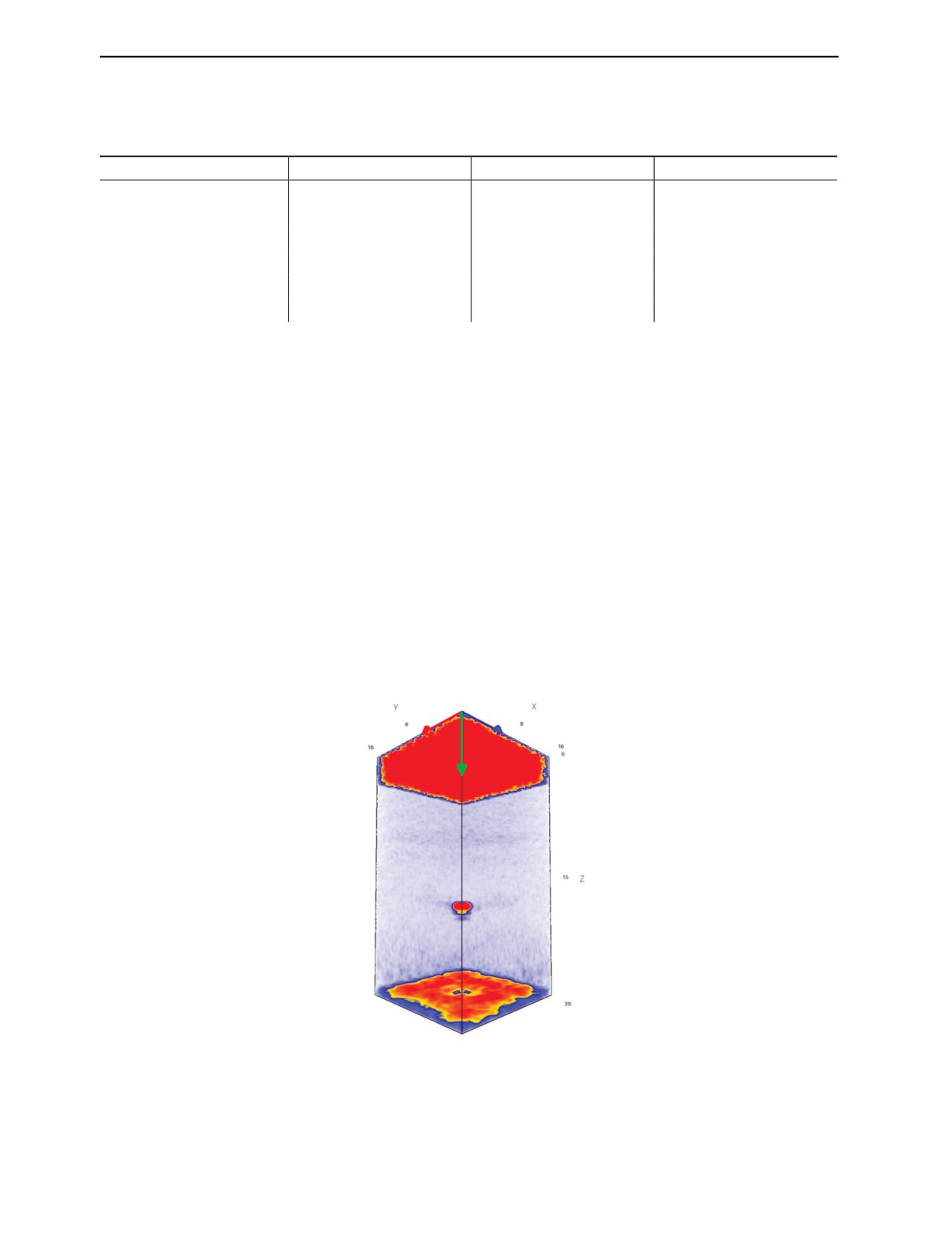
Как было сказано ранее, результатом цифровой когерентной обработки экспериментальных
данных являлись трехмерные изображения дефектов в участках тестового образца (рис. 6).
Рис. 6. Пример результата трехмерной цифровой когерентной обработки.
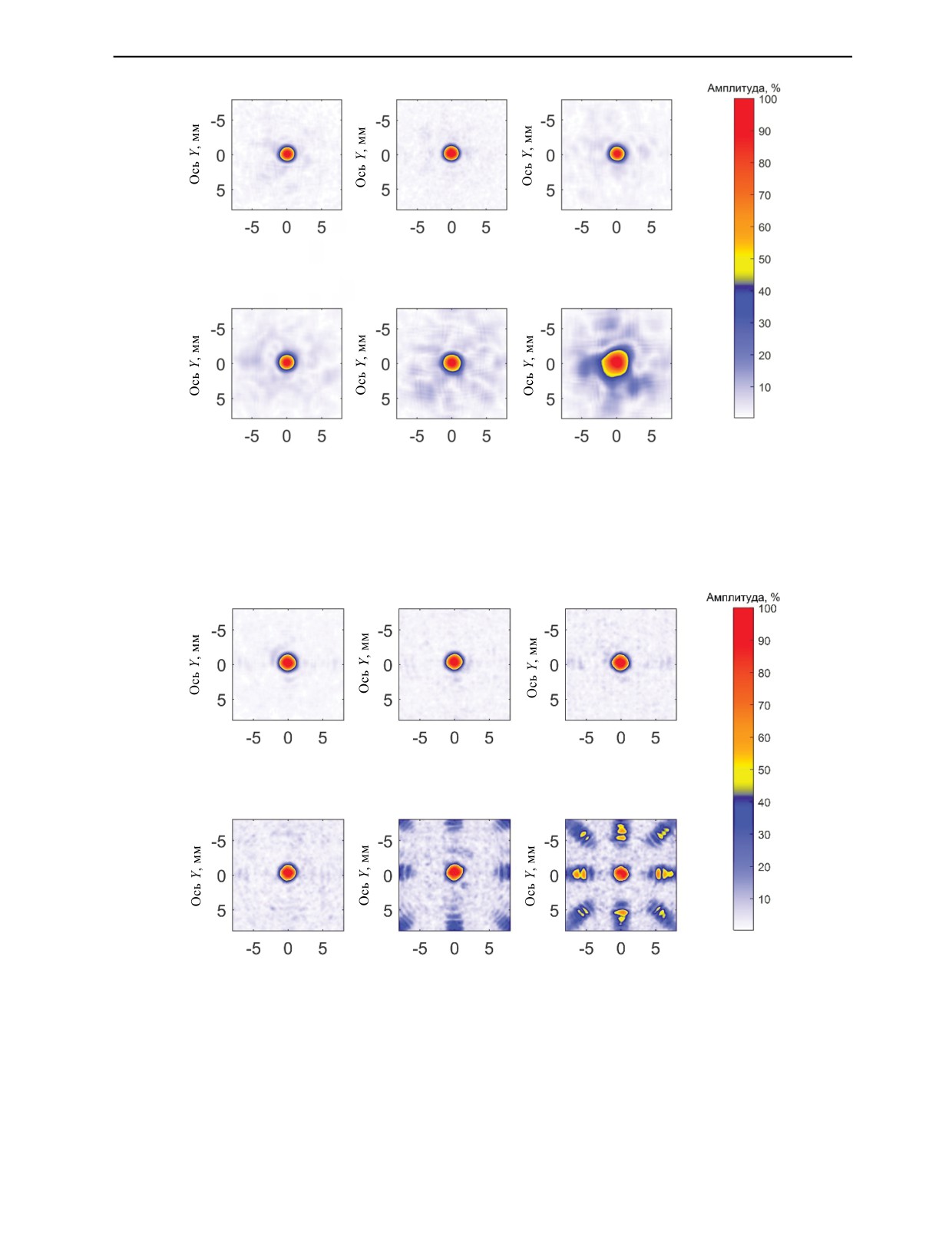
Результаты для участка тестового образца с одиночным дефектом в форме проекций на ось
XY представлены на рис. 7 и рис. 8. На рис. 7 показаны результаты при использовании преобра-
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
21
а
б
в
Ось X, мм
Ось X, мм
Ось X, мм
г
д
е
Ось X, мм
Ось X, мм
Ось X, мм
Рис. 7. Результаты цифровой когерентной обработки с применением алгоритма на основе НБПФ и матричной АР с неэк-
видистантным расположением элементов: АР № 1 (а); АР № 2 (б); АР № 3 (в); АР № 4 (г); АР № 5 (д); АР № 6 (е).
а
б
в
Ось X, мм
Ось X, мм
Ось X, мм
г
д
е
Ось X, мм
Ось X, мм
Ось X, мм
Рис. 8. Результаты цифровой когерентной обработки с применением алгоритма с расчетами во временной области и АР
с эквидистантным расположением элементов: АР № 1 (а); АР № 2 (б); АР № 3 (в); АР № 4 (г); АР № 5 (д); АР № 6 (е).
зователей с неэквидистантным расположением элементов в форме диска Пуассона и применении
цифровой когерентной обработки с расчетами в частотной области. Аналогичные результаты при
использовании стандартного подхода представлены на рис. 8. Обозначения АР на рис. 7 даны в со-
ответствии с табл. 1, а обозначение преобразователей на рис. 8 даны в соответствии с табл. 2.
Дефектоскопия
№ 10
2022
22
Д.О. Долматов, Н.И. Ермошин
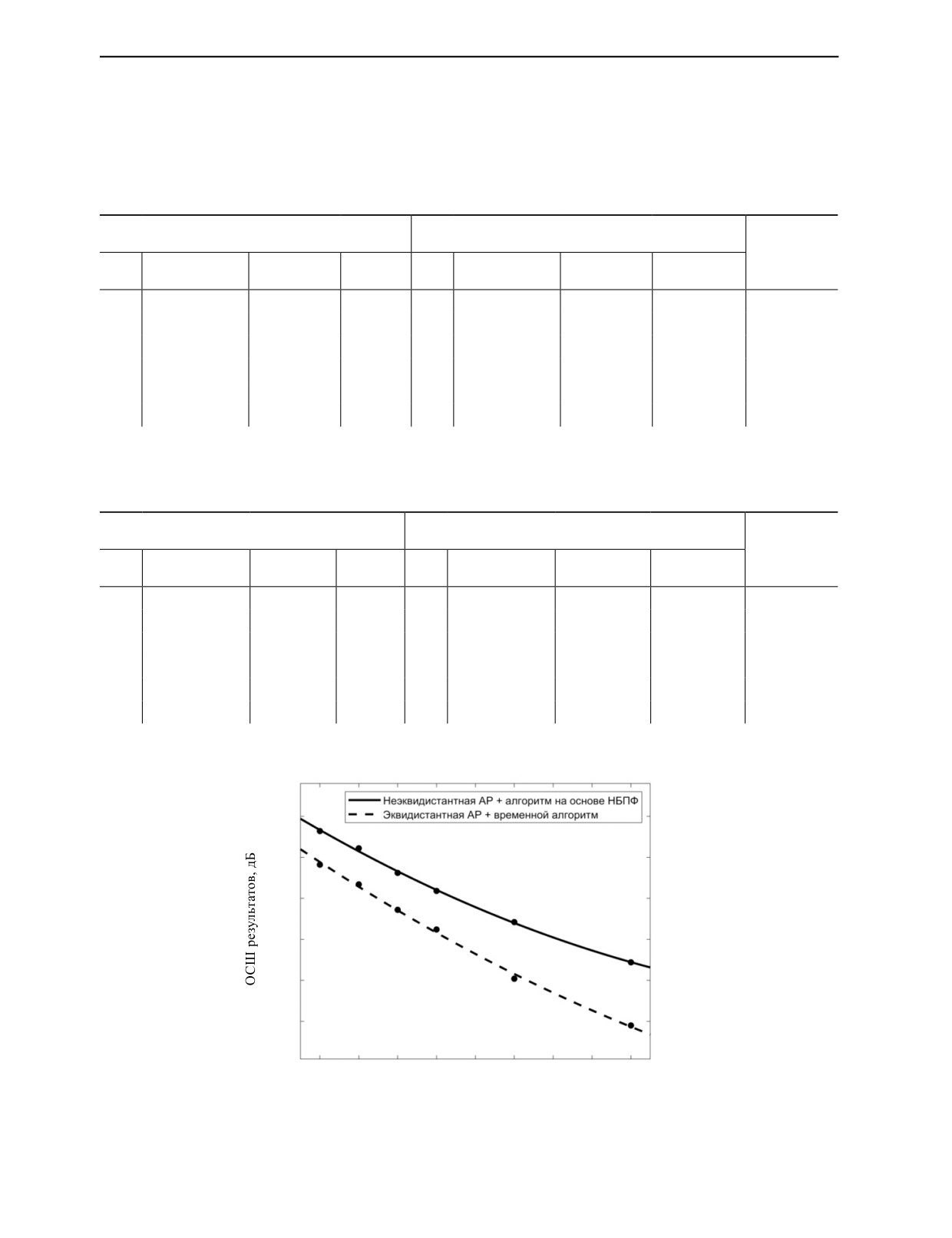
Полученные изображения оценивали по разрешению и ОСШ в соответствии с формулами (16)
и (17). Результаты оценки величины API представлены в табл. 3, а результаты оценки ОСШ —
в табл. 4 и в графиках на рис. 9.
Таблица
3
Значения API полученных результатов
АР с неэквидистантным расположением элементов
АР с эквидистантным расположением элементов
Разница, %
№
Количество
Параметр r,
№
Количество
Параметр h,
API
API
АР
элементов АР
мм
АР
элементов АР
мм
1
1153
0,4
0,809
1
1600
0,4
0,808
0,1
2
524
0,6
0,807
2
729
0,6
0,814
-0,9
3
297
0,8
0,811
3
400
0,8
0,823
-1,5
4
194
1
0,865
4
256
1
0,841
2,8
5
101
1,4
0,949
5
144
1,4
0,893
5,9
6
51
2
2,580
6
64
2
0,668
74,1
Таблица
4
Значения ОСШ полученных результатов
АР с неэквидистантным расположением элементов
АР с эквидистантным расположением элементов
Разница, дБ
№
Количество
Параметр r,
№
Количество
Параметр h,
ОСШ, дБ
ОСШ, дБ
АР
элементов АР
мм
АР
элементов АР
мм
1
1153
0,4
28,2
1
1600
0,4
24,1
4,1
2
524
0,6
26,1
2
729
0,6
21,7
4,4
3
297
0,8
23,1
3
400
0,8
18,6
4,5
4
194
1
20,9
4
256
1
16,2
4,7
5
101
1,4
17,1
5
144
1,4
10,2
6,9
6
51
2
12,2
6
64
2
4,5
7,7
30
25
20
15
10
5
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
Минимальное расстояние между соседними элементами, мм
Рис. 9. Зависимость ОСШ от минимального расстояния между элементами матричных АР.
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
23
Таким образом, исходя из полученных данных, применение АР с неэквидистантным располо-
жением элементов в совокупности с цифровой когерентной обработкой с расчетами в частотной
области на основе НБПФ способно обеспечить восстановление изображений со сходным разре-
шением относительно стандартного подхода при более высоком ОСШ полученных результатов.
При этом необходимо отметить, что при минимальном расстоянии между элементами (задаются
параметром r для АР с неэквидистантным расположением элементов и параметром h для пре-
образователя c эквидистантным расположением элементов), равном 2 мм, в обоих случаях изо-
бражение высокого качества получить не удалось. При использовании АР с неэквидистантным
расположением элементов и алгоритма на основе НБПФ получается низкое разрешение изобра-
жения дефекта, в то время как при использовании стандартного подхода восстанавливаемое изо-
бражение имеет низкое ОСШ.
На рис. 10 представлены результаты цифровой когерентной обработки с расчетами в частот-
ной области на основе НБПФ для участка тестового образца, содержащего несколько близкора-
сположенных дефектов. Обозначение АР с неэквидистантным расположением элементов дается
в соответствии с табл. 1.
а
б
в
Ось X, мм
Ось X, мм
Ось X, мм
г
д
Ось X, мм
Ось X, мм
Рис. 10. Результаты цифровой когерентной обработки с применением алгоритма на основе НБПФ и матричной АР с
неэквидистантным расположением элементов:
АР № 1 (а); АР № 2 (б); АР № 3 (в); АР № 4 (г); АР № 5 (д).
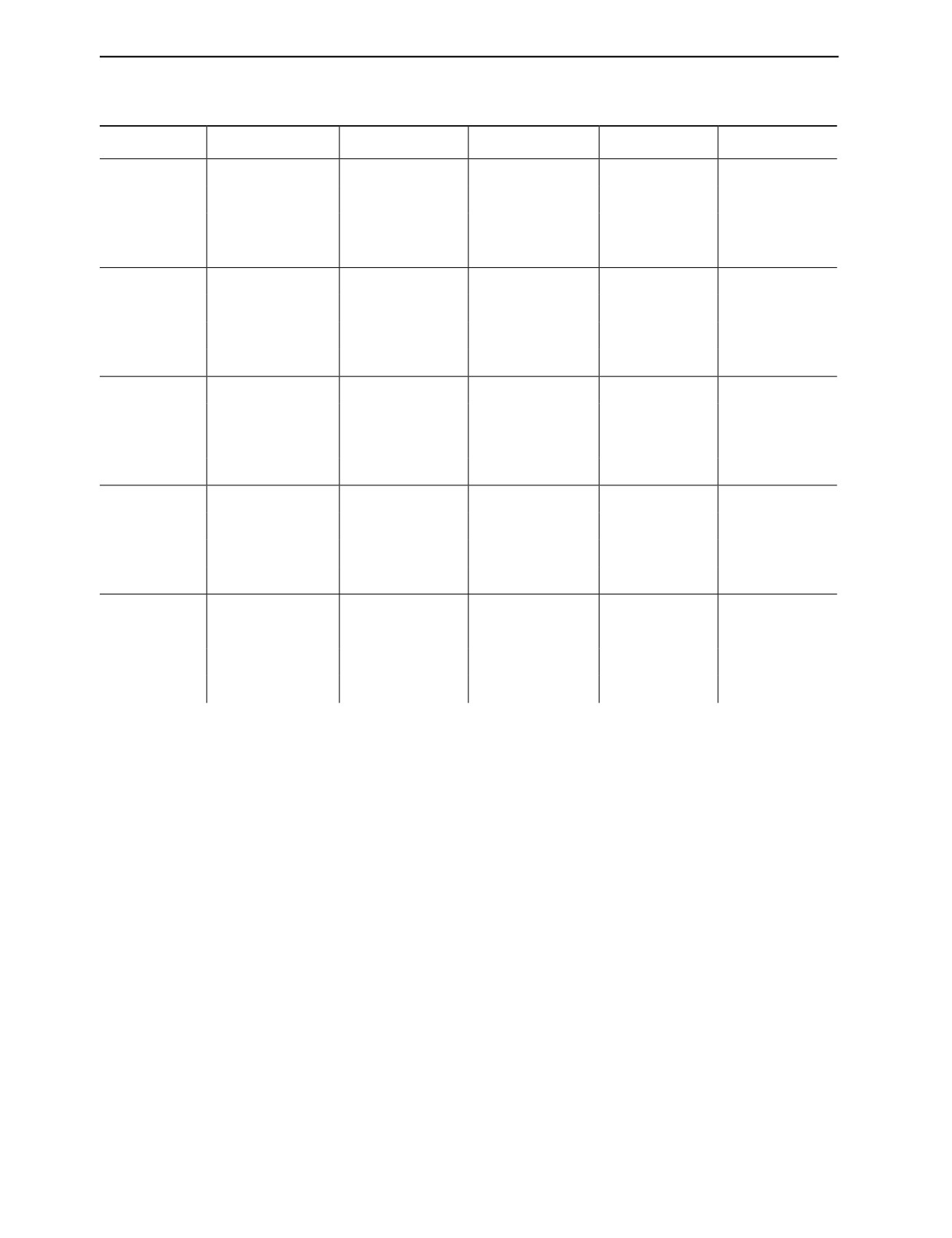
Результаты оценки значения API и ОСШ представлены в табл. 5. Нумерация дефектов в табл. 5
приводится в соответствии с рис. 3.
В целом, результаты, полученные с применением алгоритма на основе НБПФ для участка
тестового образца с несколькими дефектами, коррелируют с результатами, полученными ранее
для участка образца с одиночным дефектом. Получено сходное разрешение изображений де-
фектов, которое оценивалось с применением величины API при высоком ОСШ. Это показывает
потенциальную эффективность применения алгоритма на основе НБПФ совместно с использо-
ванием АР с неэквидистантным расположением элементов.
Дефектоскопия
№ 10
2022
24
Д.О. Долматов, Н.И. Ермошин
Таблица
5
Значения API и ОСШ результатов, полученных для участка тестового образца с несколькими дефектами
Количество
№ АР
Параметр r, мм
№ дефекта
API
ОСШ, дБ
элементов АР
1
0,827
25,9
2
0,818
26,6
1
1153
0,4
3
0,805
27,0
4
0,832
24,5
1
0,833
22,5
2
0,821
24,2
2
524
0,6
3
0,801
24,5
4
0,844
21,7
1
0,840
20,1
2
0,823
21,7
3
297
0,8
3
0,816
21,9
4
0,864
18,9
1
0,903
17,2
2
0,855
18,2
4
194
1
3
0,837
18,6
4
0,932
16,4
1
0,974
12,4
2
0,976
14,5
5
101
1,4
3
0,963
15,3
4
1,051
12,2
ЗАКЛЮЧЕНИЕ
В данной работе рассмотрен алгоритм цифровой когерентной обработки сигналов с расче-
тами в частотной области на основе НБПФ, реализующий расчеты в частотной области и учи-
тывающий непостоянный шаг между активными элементами матричной АР, что актуально при
использовании разреженных преобразователей и АР с неэквидистантным расположением эле-
ментов. В рамках сравнительного анализа данный алгоритм рассматривался совместно с матрич-
ной АР с неэквидистантным расположением элементов в форме диска Пуассона. Результаты,
полученные с применением подобного подхода, сравнивали с результатами, полученными с при-
менением стандартного для цифровой когерентной обработки подхода (алгоритм с расчетами во
временной области в совокупности с использованием матричной АР с эквидистантным распо-
ложением элементов). Полученные результаты свидетельствуют, что оба подхода обеспечивают
получение изображений дефектов со сходным разрешением. Разница в значении API для резуль-
татов, полученных с применением двух подходов, во всех случаях не превышала 6 %. При этом
применение решетки с неэквидистантным расположением элементов в совокупности с алгорит-
мом на основе НБПФ обеспечивает получение результатов с более высоким ОСШ. Во всех рас-
смотренных случаях алгоритм на основе НБПФ обеспечивал получение изображений дефекта с
более высоким ОСШ (разница составляла от 4,1 до 7,7 дБ). Также восстановление изображений
с применением АР с неэквидистантым расположением элементов осуществлялась меньшим по
объему сигналов относительно стандартного подхода. При одинаковом ограничении на мини-
мальное расстояние между соседними элементами набор сигналов АР с неэквидистантным рас-
Дефектоскопия
№ 10
2022
Цифровая когерентная обработка сигналов с расчетами в частотной области...
25
положением элементов был ниже на значение от 20 до 30 %, что является важным фактором для
решения задачи повышения скорости восстановления изображений. Результаты, полученные с
применением алгоритма на основе НБПФ для участка тестового образца с одним дефектом, были
подтверждены результатами, полученными с использованием указанного алгоритма для участ-
ка образца с несколькими близкорасположенными дефектами. Во всех рассмотренных случаях
получены изображения с высоким ОСШ и разрешением, сходным с тем, что были получены для
участка образца с одиночным дефектом.
Полученные результаты являются базисом для дальнейших исследований и разработок в об-
ласти цифровой когерентной обработки сигналов матричных антенных решеток для решения
задач ультразвукового неразрушающего контроля. Важным вопросом является аппаратная опти-
мизация алгоритма на основе НБПФ, например, перевод расчетов в рамках данного алгоритма
на программируемые логические интегральные схемы или графические процессоры, что должно
обеспечить высокую скорость получения результатов. Кроме того, в работе рассмотрен алгоритм
для работы матричной АР в совмещенном режиме. Тем не менее в контексте использования АР
наибольший интерес представляет использование режима двойного сканирования, обеспечива-
ющего получение максимального набора данных о внутренней структуре контролируемого изде-
лия. Таким образом, адаптация алгоритма на основе НБПФ для работы матричной АР в режиме
двойного сканирования также является актуальным и важным вопросом дальнейших исследова-
ний и разработок.
Исследование выполнено за счет гранта Президента Российской Федерации для государствен-
ной поддержки молодых российских ученых — кандидатов наук и докторов наук (проект № МК-
1679.2022.4).
СПИСОК ЛИТЕРАТУРЫ
1. Bazulin E.G. Comparison of systems for ultrasonic nondestructive testing using antenna arrays or phased
antenna arrays // Russian Journal of Nondestructive Testing. 2013. V. 49. No. 7. P. 404―423.
2. Samokrutov A.A., Shevaldykin V.G. Ultrasonic tomography of metal structures using the digitally focused
antenna array method // Russian Journal of Nondestructive Testing. 2011. V. 47. No. 1. P. 16―29.
3. Holmes C., Drinkwater B., Wilcox P. The post-processing of ultrasonic array data using the total focusing
method // Insight-Non-Destructive Testing and Condition Monitoring. 2004. V. 46. No. 11. P. 677―680.
4. M2M Gekko Specifications Sheet [Электронный ресурс]// Eddyfi Режим доступа: https://eddyfi.com/
doc/Downloadables/201906_M2M-GEKKO-specifications-sheet_A4-01.pdf, свободный. Загoл. с экрана
(дата обращения: 20.07.2022).
ru/phasedarray/omniscan-x3/, свободный. Загoл. с экрана (дата обращения: 20.07.2022).
defektoskopy/augur-art/, свободный. Загoл. с экрана (дата обращения: 20.07.2022).
7. Высокочастотный ультразвуковой дефектоскоп-томограф а1550 introvisor [Электронный ресурс]//
defektoskop-tomograf-a1550-introvisor/, свободный. Загoл. с экрана (дата обращения: 20.07.2022).
8. Dolmatov D.O., Tarrazó-Serrano D., Filippov G.A., Minin I.V., Minin O.V., Sednev D.A. Application of
Phase-Reversal Fresnel Zone Plates for Improving The Elevation Resolution in Ultrasonic Testing with Phased
Arrays // Sensors. 2019. V. 19. No. 23. Article number: 5080.
9. Bazulin E.G. Ultrasonic testing on a singly reflected beam using sparse antenna arrays and 3D echo-
signal processing // Russian Journal of Nondestructive Testing. 2016. V. 52. No. 1. P. 1—13.
10. Hu H., Du J., Ye C., Li X. Ultrasonic phased array sparse-TFM imaging based on sparse array optimization
and new edge-directed interpolation // Sensors. 2018. V. 18. No. 6. Article number: 1830.
11. Yang P., Chen B., Shi K.R. Novel method to design sparse linear arrays for ultrasonic phased array //
Ultrasonics. 2006. V. 44. P. e717―e721.
12. de Souza J.C.E., Parrilla Romero M., Higuti R.T., Martínez-Graullera O. Design of Ultrasonic
Synthetic Aperture Imaging Systems Based on a Non-Grid 2D Sparse Array // Sensors. 2021. V. 21. No. 23.
Article number: 8001.
13. Martínez-Graullera O., de Souza J.C.E., Parrilla Romero M., Higuti R.T. Design of 2D Planar Sparse
Binned Arrays Based on the Coarray Analysis // Sensors. 2021. V. 21. No. 23. Article number: 8018.
14. Ramalli A., Boni E., Savoia A.S., Tortoli P. Density-tapered spiral arrays for ultrasound 3-D
imaging // IEEE Transactions on ultrasonics, ferroelectrics, and frequency control. 2015. V. 62. No. 8.
P. 1580―1588.
15. Skjelvareid M.H., Olofsson T., Birkelund Y., Larsen Y. Synthetic aperture focusing of ultrasonic data
from multilayered media using an omega-k algorithm // IEEE transactions on ultrasonics, ferroelectrics, and
frequency control. 2011. V. 58. No. 5. P. 1037―1048.
Дефектоскопия
№ 10
2022
26
Д.О. Долматов, Н.И. Ермошин
16. Hunter A.J., Drinkwater B.W., Wilcox P.D. The wavenumber algorithm for full-matrix imaging using
an ultrasonic array // IEEE transactions on ultrasonics, ferroelectrics, and frequency control. 2008. V. 55.
No. 11. P. 2450―2462.
17. Dolmatov D.O., Sednev D.A., Bulavinov A.N., Pinchuk R.V. Applying the algorithm of calculation in
the frequency domain to ultrasonic tomography of layered inhomogeneous media using matrix antenna arrays
// Russian Journal of Nondestructive Testing. 2019. V. 55. No. 7. P. 499―506.
18. Capozzoli A., Curcio C., Liseno A. Optimized Nonuniform FFTs and Their Application to Array Factor
Computation // IEEE Transactions on Antennas and Propagation. 2018. V. 67. No. 6. P. 3924—3938.
19. Moreau L., Drinkwater B.W., Wilcox P.D. Ultrasonic imaging algorithms with limited transmission
cycles for rapid nondestructive evaluation // IEEE transactions on ultrasonics, ferroelectrics, and frequency
control. 2009. V. 56. No. 9. P. 1932―1944.
20. Bannouf S., Robert S., Casula O., Prada C. Data set reduction for ultrasonic TFM imaging using the
effective aperture approach and virtual sources // Journal of Physics: Conference Series. IOP Publishing. 2013.
V. 457. No. 1. Аrticle number: 012007.
21. Hu H., Du J., Xu N., Jeong H., Wang X. Ultrasonic sparse-TFM imaging for a two-layer medium
using genetic algorithm optimization and effective aperture correction // NDT & E International. 2017. V. 90.
P. 24―32.
22. Dolmatov D.O., Ermoshin N.I., Koneva D.A., Sednev D.A. Application of Nonuniform Fourier Transform
to Solving Ultrasonic Tomography Problems with Antenna Arrays // Russian Journal of Nondestructive Testing.
2020. V. 56. No. 8. P. 603―610.
23. Martínez-Graullera O., Martín C. J., Godoy G., Ullate L.G. 2D array design based on Fermat spiral for
ultrasound imaging // Ultrasonics. 2010. V. 50. No. 2. P. 280―289.
24. Velichko A., Wilcox P.D. Characterisation of Complex Defects Using Two-Dimensional Ultrasonic
Arrays // Proceedings of the ECNDT. 2010. V. 1. P. 18.
25. Bridson R. Fast Poisson disk sampling in arbitrary dimensions // ACM SIGGRAPH. 2007.
26. Greengard L., Lee J.Y. Accelerating the nonuniform fast Fourier transform // SIAM review. 2004.
V. 46. No. 3. P. 443—454.
27. Fan C., Caleap M., Pan M., Drinkwater B.W. A comparison between ultrasonic array beamforming
and super resolution imaging algorithms for non-destructive evaluation // Ultrasonics. 2014. V. 54. No. 7.
P. 1842—1850.
28. Zhang J., Drinkwater B.W., Wilcox P.D., Hunter A.J. Defect detection using ultrasonic arrays: The
multi-mode total focusing method // NDT&E International. 2010. V. 43. P. 123―133.
29. Dolmatov D. O., Tarrazó-Serrano D., Filippov G.A., Uris A., Sednev D.A. Application of Phase-
Reversal Fresnel Zone Plates for High-Resolution Robotic Ultrasonic Non-Destructive Evaluation // Sensors.
2021. V. 21. No. 23. Article number: 7792.
30. Kvasnikov K.G., Soldatov A.I., Bolotina I.O., Krening K.M., Potapenko A.A. The use of geometrical
acoustics for the solution of visualization problems // Russian Journal of Nondestructive Testing. 2013. V. 49.
No. 11. P. 625―630.
Дефектоскопия
№ 10
2022