Акустические методы
УДК 620.179.17
ОЦЕНКА ВЕРОЯТНОСТИ ОБНАРУЖЕНИЯ
АКУСТИКО-ЭМИССИОННЫХ СИГНАЛОВ МЕТОДОМ АМПЛИТУДНОЙ
ДИСКРИМИНАЦИИ ПРИ МАЛОМ СООТНОШЕНИИ СИГНАЛ/ШУМ
© 2022 г. И.А. Растегаев1,*, И.С. Ясников1, И.И. Растегаева1,
Э.А. Аглетдинов1, Д.Л. Мерсон1
1Тольяттинский государственный университет, Россия 445020 Тольятти, ул.Белорусская, 14
*E-mail: RastIgAev@yandex.ru
Поступила в редакцию 28.01.2022; после доработки 12.02.2022
Принята к публикации 22.02.2022
Предложен подход к расчету вероятности обнаружения акустико-эмиссионных (АЭ) сигналов в широком диапазоне
соотношения сигнал/шум (SNR), результаты которого демонстрируют хорошую сходимость с экспериментальными дан-
ными. Отличительной особенностью предлагаемого подхода является покадровый анализ площадей распределения
выбросов амплитуды в сигнале и шуме, превышающих порог амплитудной дискриминации, что позволяет выполнять
оценки при SNR < 6 дБ. Показано, что положительным эффектом применения предлагаемого подхода является переход
от оценки вероятности пропуска сигналов от дефекта к оценке вероятности обнаружения сигнала каждого вида и разной
степени трансформации (искажения), что позволяет выполнить объективное сравнение и выбор вариантов оптимальных
процедур записи, обработки, фильтрации (шумоподавления) и анализа данных АЭ, а также подобрать настройки для их
реализации. Предлагаемый подход инвариантен к способу получения кадров записи АЭ и форме акустических сигналов,
поэтому применим для оценки одно- и многомодальной импульсной и непрерывной АЭ, зарегистрированной кадрами в
пороговом и беспороговом режимах записи АЭ. Установлены условия, влияющие на расхождение результатов теорети-
ческих и экспериментальных исследований, и обозначены пути повышения точности применения предлагаемого под-
хода. Показано, что амплитудное детектирование сигналов возможно, начиная с уровня порога, превышающего уровень
шума на 3 дБ, при наличии выбросов амплитуды в шуме не выше 7,5 дБ среднеквадратического отклонения его распре-
деления. В противном случае качественное и устойчивое детектирование сигнала по амплитудному порогу обеспечено
быть не может.
Ключевые слова: вероятность обнаружения сигнала, вероятность регистрации ложного сигнала, отношение сигнал/
шум, акустическая эмиссия.
DOI: 10.31857/S0130308222030010
ВВЕДЕНИЕ
За последнее десятилетие наблюдается рост публикаций, посвященных применению метода
акустической эмиссии (АЭ) для раннего обнаружения дефектов (повреждений), развитие которых
в объектах контроля находится на такой стадии, при которой либо еще возможна эксплуатация
объекта до следующего капитального ремонта, либо могут быть применены компенсирующие
мероприятия, позволяющие устранить или остановить развитие дефекта, т.е. продлить срок служ-
бы оборудования [1—3]. При этом полагается, что развитие дефекта на ранней стадии сопрово-
ждается малым масштабом источника АЭ, при котором формируются низкоамплитудные сигналы,
сопоставимые с уровнем шума (SNR < 6 дБ, где SNR — отношение сигнал/шум). Кроме того,
существует устойчивый тренд на расширение номенклатуры объектов АЭ контроля и мониторин-
га от малошумных (сосуды, трубопроводы, подъемные краны и др.) в сторону зашумленных
(электротрансформаторы, силовые передачи, подшипники качения и скольжения и др.), в которых
велика вероятность одновременной генерации нескольких источников АЭ с сопоставимой ампли-
тудой сигналов. Проблема контроля на границе SNR неизбежно возникает и в случае существен-
ного затухания АЭ волн в контролируемом объекте, когда нет возможности более близкого рас-
положения преобразователей АЭ в антенных группах. Таким образом, сегодня во многих направ-
лениях применения метода АЭ существует потребность в оценке возможности обнаружения
«полезного» сигнала при SNR < 6 дБ.
В основе наиболее распространенного способа детектирования сигналов АЭ лежат алгоритмы,
использующие амплитудный порог дискриминации, которые имеют сегодня несколько разновид-
ностей и модификаций, обеспечивающие повышенную вероятность обнаружения сигнала на уров-
не шума в том числе [4—7]. Также широко практикуется повышение вероятности обнаружения
сигнала путем использования прогрессивных методов фильтрации данных АЭ перед применением
амплитудного детектора [8, 9]. Вместе с тем, на сегодня нет единого подхода для оценки вероят-
ности пропуска сигнала (Рпс) или возникновения ложного события (Рлс) в условиях низкого соот-
4
И.А. Растегаев, И.С. Ясников, И.И. Растегаева и др.
а
б
f(a, D2)p
f(a, D1)
f(a, D
2
)
Рпс
Рпс
Рлс
f(a, D1)
o
Р
лс
0
ath
as
an
a
n
ath
asp
Рис. 1. Схемы оценки Рлс и Рпс по распределению амплитуды сигналов на основе вероятностно-статистических подходов
принятия диагностических решений (а) и через оценку достоверности контроля АЭ (б).
ношения сигнал/шум (SNR < 6 дБ), который позволил бы выполнить объективное теоретическое
сравнение и выбор среди различных вариантов процедур записи, обработки и анализа данных АЭ
и настроек для их реализации.
Основными способами оценки Рлс и Рпс являются вероятностно-статистические подходы при-
нятия диагностических решений на основе методов: минимального риска, минимального числа
ошибок, минимакса, Неймана—Пирсона и наибольшего правдоподобия [10]. Применение обо-
значенных методов сводится к анализу схемы, представленной на рис. 1а [11, 12], и заключается
в поиске оптимального значения уровня амплитудного порога дискриминации (ath), который обе-
спечивал бы минимальное или заданное число ошибочно зарегистрированных сигналов шума
(площадь Рлс) или обеспечивал заданную (допустимую) вероятность пропуска сигналов от ис-
точника АЭ (площадь Рпс), где as — амплитуда сигнала АЭ, an — амплитуда шума; f(a, D1) и f(a,
D2) — функции распределения вероятности наступления событий D1 и D2 соответственно, где
D1 — диагностическое событие в виде ложного обнаружения сигнала, а D2 — правильного обна-
ружения сигнала соответственно.
Другим известным подходом является оценка вероятностей Рлс и Рпс через достоверность
контроля путем определения площадей, ограниченных кривыми амплитудного распределения
расчетных f(a, D2)p и обнаруженных f(a, D2)o сигналов от источника АЭ, отсеченных линией asp,
представляющей собой нормировочное значение какого-то ранга (критерия). Одна из схем дан-
ного подхода представлена на рис. 1б [14]. При данном подходе кривую f(a, D2)p получают с
использованием математических моделей или посредством аппроксимации фактически полу-
ченного амплитудного распределения сигналов от дефекта f(a, D2)o [14—16]. Кроме того, су-
ществует энтропийный подход [17], при котором достоверность АЭ контроля оценивается не
через вероятности наступления диагностических событий, а через энтропийную погрешность
оценки их распределений. Однако при малом соотношении сигнал/шум (as ≈ an) распределения
f(a, D1) и f(a, D2), практически сливаются (рис. 2) и известные подходы не позволяют адекватно
установить вероятность обнаружения сигнала на уровне шума и, тем более, ниже его. В связи с
этим, целью настоящей работы являлась разработка универсального подхода для оценки вероят-
ности обнаружения сигнала АЭ, пригодного для анализа ситуаций, как при SNR < 6 дБ, так и при
SNR > 6 дБ.
МЕТОДИКА ИССЛЕДОВАНИЙ
Предлагаемый подход оценки Рос заключается в переходе от расчетных схем рис. 1 к расчетной
схеме, представленной на рис. 2, в основе которой заложены следующие отличительные особенно-
сти. Во-первых, возможность распознавания сигнала в шуме рассматривается не в рамках анализа
распределения амплитуд зарегистрированных сигналов, а в рамках анализа распределений выбро-
сов амплитуды ai, имеющихся в каждом записанном кадре записи АЭ (длиной trec), построенных
по отсчетам принадлежащих шуму (0—t1 ∩ t2—trec) и шуму+сигнал (t1—t2). Во-вторых, в рамках
такой постановки задачи осуществляется переход от анализа перекрытия площадей распределений
Дефектоскопия
№ 3
2022
Оценка вероятности обнаружения акустико-эмиссионных сигналов методом амплитудной...
5
as
Рос
an
ath
Рлс
0
f(a, D2)
f(a, D1)
0
t1
t2
trec
Рис. 2. Схема оценки Рлс и Рос по распределению выбросов амплитуды в одном кадре записи АЭ.
сигнала и шума относительно порога к оценке площадей распределения сигнала и шума, превы-
шающих порог, т.е. вместо определения вероятности пропуска сигналов от дефекта (Рпс) находится
вероятность обнаружения сигнала (Рос) каждого вида. При этом безразлично каким способом полу-
чен кадр записи АЭ: пороговым (кадр длиной trec записан по пересечению порога) или беспорого-
вым (деление stream-записи на кадры длиной trec), но при обязательном выполнении условия Най-
квиста—Шеннона (Котельникова): fd ≥ 2fmaх, где fd и fmax — частота дискретизации и максимальная
частота диапазона регистрации АЭ соответственно.
Предположим, что на детектор амплитудной дискриминации уровнем (ath) поступает времен-
ная запись АЭ, в пределах которой имеется сигнал максимальной амплитуды (as) на фоне шума
максимальной амплитуды (an). В условиях обеспечения широкополосной записи АЭ можно пред-
положить нормальную плотность распределения выбросов амплитуды в шуме. В условиях низкого
соотношения SNR основную долю сигнала составляет шум, поэтому также можно предположить и
в сигнале близкий к нормальному закон распределения выбросов амплитуды, тогда
2
2
f
(
a
)
=N
(
µ
,σ
)
и
f
(
a
)
=N
(
µ
,
σ
)
,
(1)
i n
1
1
i s
2
2
где μ1, σ12 и μ2, σ22 — соответственно математическое ожидание и дисперсия распределения ампли-
туд шума f(ai)n и сигнала f(ai)s, N — обозначает нормальный закон распределения (Гаусса) амплитуд
на временной записи АЭ. После построения амплитудного распределения и его нормировки полу-
чаем функции f(a, D1) и f(a, D2) в виде вероятности регистрации отсчета амплитудой ai > ath. Тогда
вероятность обнаружения ai-го отсчета сигнала (число возможных положительных исходов) с при-
менением амплитудных способов детектирования будет определяться разностью площадей F(ai >
> ath)n и F(ai > ath)s. Однако, чтобы получить вероятность обнаружения сигнала (Рос), необходимо
разделить разность положительных исходов на полное количество возможных исходов, т.е. на сум-
му площадей F(ai > ath)n и F(ai > ath)s, что запишется как
a
s
a
n
2⋅
f
(
a,D
)
da
−
2⋅
f
(
a,D
)
da
F
(
a
>
a
)
−
F
(
a
>
a
)
∫
2
∫
1
i
th
s
i
th
n
a
th
a
th
P
=
=
(2)
oc
a
s
a
n
F
(
a
>
a
)
+
F
(
a
>
a
)
i
th
s
i
th
n
2⋅
f
(
a,D
)
da
+
2⋅
f
(
a,D
)
da
∫
2
∫
1
a
th
a
th
С учетом предположения о нормальной плотности распределения сигнала и шума получаем:
a
a
(
a−µ
2
)2
s
s
−
1
2
2σ
2
(3)
f
(
a
, D
)
da
=
⋅
e
da,
∫
2
∫
σ
2π
a
th
a
th
2
2
a
a
(
a−µ
)
n
s
−
1
1
2
2σ
1
f
(
a,D
)
da
=
⋅
e
da
(4)
∫
1
∫
σ
2π
a
th
a
th
1
Дефектоскопия
№ 3
2022
6
И.А. Растегаев, И.С. Ясников, И.И. Растегаева и др.
Поскольку распределения f(a, D1) и f(a, D2) центрированы и нормированы, то μ1 = μ2 = 0, F(a)n =
= F(a)s = 1. Следует отметить, что благодаря нормировке F(a)n = F(a)s к 1 можно нивелировать зави-
симость оценки Рос: от длины кадра (trec); от соотношения в нем длительности шума (0-t1 ∩ t2-trec)
к длительности сигнала (t1-t2), а также от количества однотипных сигналов, имеющихся в кадре и
следующих друг за другом без перекрытия. С учетом изложенных допущений получаем решение
(3) и (4) в виде:
a
a
s
th
as
erf
−erf
2σ
2σ
(5)
2
2
f
(
a,D
2
)
da
=
,
∫
2
a
th
a
a
n
th
erf
−erf
an
2σ
2σ
(6)
1
1
f
(
a,D
)
da
=
∫
1
2
a
th
Подставляя (5) и (6) в (2), получаем решение в общем виде:
a
a
a
a
s
th
n
th
erf
−
erf
−erf
+erf
2σ
2σ
2σ
2σ
2
2
1
1
P
=
(7)
oc
a
a
a
a
s
th
n
th
erf
−
erf
+erf
-erf
2σ
2
2σ
2
2σ
1
2σ
1
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ И ИХ ОБСУЖДЕНИЕ
Из (7) видно, что вероятность обнаружения сигнала в шуме (Poc), по сути, определяется двумя
группами отношений. Первые определяют близость уровня порога ath к основной части (средне-
квадратическому отклонению) распределения значений амплитуды сигнала (σ2) и шума (σ1). Вто-
рые определяют наличие выбросов в сигнале (as) и шуме (an), значительно превышающих основ-
ную часть значений распределения амплитуд сигнала (σ2) и шума (σ1). Рассмотрим влияние каждой
группы составляющих на Poc.
Для оценки влияния отношений первой группы примем, что максимальная амплитуда выбро-
сов в сигнале (as) и шуме (an) ограничена значением близким к 3σ, а сами σ на основании свойств
нормального распределения представим в виде: σ1 = 0,34·an, σ2 = 0,34·as, тогда из (7) получаем:
a
a
a
a
s
th
n
th
erf
−erf
−erf
+erf
2⋅0,34⋅a
2⋅0,34
⋅ a
2⋅0,34⋅a
2⋅0,34⋅a
s
s
n
n
P
=
=
oc1
a
a
a
a
s
th
n
th
erf
−erf
+erf
−erf
2⋅0,34⋅a
2⋅0,34
⋅a
2⋅0,34⋅a
2⋅0,34⋅a
s
s
n
n
a
a
th
th
1
−
erf
−1+erf
0,48⋅a
0,48⋅a
s
n
=
,
a
a
th
th
1
−
erf
+
1−erf
0,48⋅a
0,48⋅a
s
n
что после упрощения записывается как
25⋅
a
25⋅a
th
th
erf
−erf
12
⋅
a
12⋅a
n
s
P
oc
1
=
(8)
25⋅a
25⋅a
th
th
2
−erf
−erf
12⋅a
12⋅a
s
n
Дефектоскопия
№ 3
2022
Оценка вероятности обнаружения акустико-эмиссионных сигналов методом амплитудной...
7
Из (8) следует, что группа отношений ath/σ1 и ath/σ2 сводится к соотношениям ath/as и ath/an, т.е.
взвешивает разницу сигнал/порог—порог/шум. Результаты расчета Рос1 при различных соотноше-
ниях сигнал/порог (as/ath) и порог/шум (ath/an) в дБ представлены на рис. 3. При этом расчет был
ограничен as/ath = 100 дБ и ath/an = 100 дБ, т.е. максимальный динамический диапазон, возможный
в системах АЭ.
а
б
1,0
ath - an ≥ 6 дБ
1,0
5
0
0
0 0 4
14
ath - an = 3 дБ
ath - an = 0,9 дБ
0,8
0,8
ath - an = 0 дБ
24
ath - an
= -3 дБ
0,6
ath - an = -6 дБ
0,6
ath - an = -9,5 дБ
as - ath > η дБ
η = 31
ath - an = -13 дБ
0,4
0,4
ath - an = -20 дБ
36
ath - an
= -40 дБ
0,2
0,2
45
66
0,0
0,0
0
20
40
60
80
100
-40
-30 -20
-10
0
10
20
30
40
a
- ath, дБ
an - ath, дБ
s
Рис. 3. Зависимости изменения Рос1 от as/ath и an/ath в дБ, где график (б) пересчитан из (а) и показывает значения as/ath
и an/ath, при которых Pос1 выходит на насыщение P'ос1=0,95·Рос1 max. Над точками графика (б) указано минимальное
значение η = as - ath, при котором Рос1 = P'ос1, а соединяющая их линия показывает общий тренд.
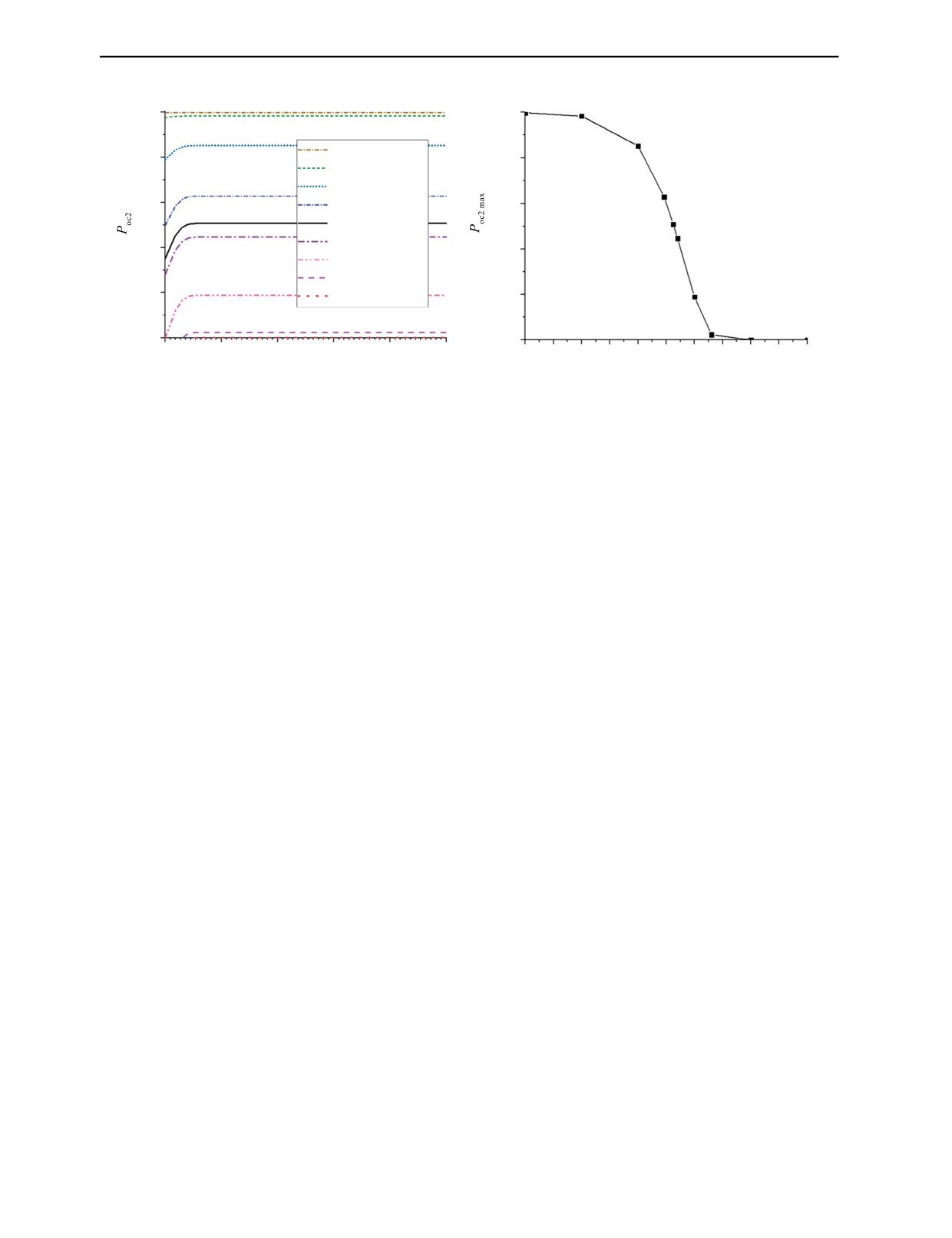
Для рассмотрения влияния на Рос второй группы соотношений примем условие регистрации
кадра рис. 2 при ath = 0, а также будем считать, что максимальная амплитуда выбросов в сигнале
(as) и шуме (an) может значительно превышать значение 3σ, т.е. as → ± ∞ и an → ± ∞, тогда из (7)
получаем:
a
a
a
a
s
n
s
n
erf
−erf
(0)
−erf
+erf
(
0
)
erf
−erf
2σ
2σ
2σ
2σ
2
1
2
1
P
oc2
=
=
=
a
a
a
a
s
n
s
n
erf
−erf
(0)
+erf
−erf
(
0
)
erf
+erf
2σ
2σ
2σ
2σ
2
1
2
1
a
n
2⋅erf
σ
=1
−
(9)
a
a
s
n
erf
+erf
2σ
2σ
2
1
Из (9) видно, что группа отношений an/σ1 и as/σ2 оценивает наличие выбросов сверх основной
части (среднеквадратического отклонения) распределения значений амплитуды сигнала и шума.
Результаты расчета Рос2 по (9) при различных соотношениях as и an по отношению к их σ в дБ
представлены на рис. 4. Аналогично предыдущему случаю расчет был ограничен as/σ2 = 100 дБ
и an/σ1 = 100 дБ.
Рис. 3 наглядно демонстрирует последствия сбоев в работе порогового детектора в при-
сутствии шума. Например, видно, что события D1 и D2 приближаются к равновероятностным
(Рос → 50 %) только при уровне порога ath = an - 9,5 дБ и уровне сигнала as = ath + 31 дБ. Причем
никаким дальнейшим повышением соотношения as/ath нельзя добиться повышения Рос. Если же
порог установлен на уровне ath = an - 13 дБ, то при любом as > ath + 36 дБ величина Рос → 30 %,
т.е. детектирование сигнала является статистически редким событием. При уровне порога ниже
Дефектоскопия
№ 3
2022
8
И.А. Растегаев, И.С. Ясников, И.И. Растегаева и др.
а
б
1,0
1,0
0
0
an - σ1 ≤ -60 дБ
0
0,8
0,8
an - σ1
= -40 дБ
an - σ1 = -20 дБ
4,6
0,6
an - σ1 = -11 дБ
0,6
an - σ1 = -7,5 дБ
ξ = 6
as - σ2 > ξ дБ
an - σ1 = -6 дБ
6
0,4
0,4
an - σ
= 0 дБ
1
an - σ1 = 6 дБ
0,2
an - σ1 ≥ 20 дБ
0,2
6
9,5
18,5
0,0
0,0
0
20
40
60
80
100
-60 -50 -40 -30 -20 -10
0
10
20
30
40
a
- σ2, дБ
an - σ1, дБ
s
Рис. 4. Зависимости изменения Рос2 от as/σ2 и an/σ1 в дБ, где график (б) пересчитан из (а) и показывает значения as/σ2
и an/σ1, при которых Pос2 выходит на насыщение P′ос2 = 0,95·Рос2 max. Над точками графика (б) указано минимальное
значение ξ = as - σ2, при котором Рос2 = P′ос2, а соединяющая их линия показывает общий тренд.
шума, начиная с величины ath = an - 20 дБ, вероятность обнаружения сигнала становится прак-
тически невозможным событием (Рос < 10 %) независимо от соотношения as/ath. В любом случае
амплитуда минимально детектируемого сигнала нелинейно смещается в сторону больших вели-
чин as/ath с увеличении ath/an (рис. 3б). Если же сигнал на уровне порога (ath ≈ as), то вероятность
его детектирования выше 50 % (т.е. статистическое событие становится скорее возможным, чем
нет), начиная с ath = an + 0,9 дБ. При ath = an + 6 дБ и выше гарантированно выявление сигнала при
любом as/ath, что совпадает с экспериментальными оценками других авторов [14].
Рис. 4 дополняет вышесказанное следующим: Рос начинает превалировать над Рлс, если отдель-
ные выбросы в шуме не превышают an = σ1 - 7,5 дБ при as > σ2 + 6 дБ и an = σ1 - 11 дБ при as ≈ σ2, т.е.
на участках, где отсутствуют высокоамплитудные выбросы шума или спадает общий уровень шума
ниже σ1, возможно обнаружить сигнал с большей вероятностью, что и используется в способах
амплитудного детектирования АЭ после фильтрации [8, 9]. Поэтому предлагаемый подход может
быть использован для количественной оценки эффективности фильтрации для Рос. Указанный под-
ход применим и для случая параллельной регистрации сигналов примерно одинаковой амплитуды
от двух источников при низком уровне фонового шума, при котором D1 — событие регистрации
сигнала АЭ от первого источника, а D2 — от второго. В этом случае предлагаемый подход позволя-
ет провести оценку минимальных граничных условий доминирования одних сигналов над други-
ми, чтобы обеспечивалось заданное значение Рос.
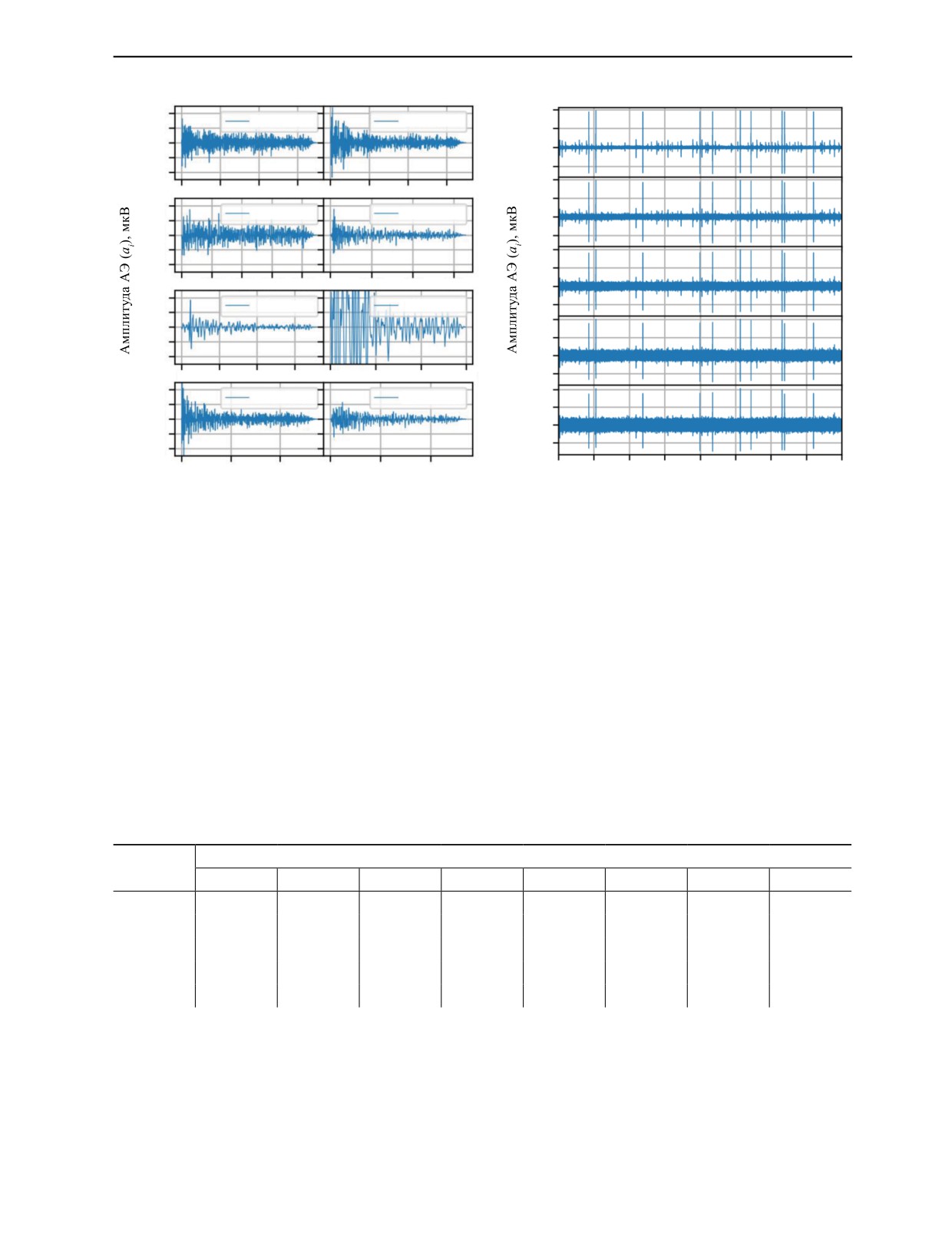
Для экспериментальной проверки предлагаемого подхода были взяты восемь типов пред-
ставительных сигналов АЭ (рис. 5), существенно отличающихся амплитудой, длительностью и
спектральным составом. Сигналы были вырезаны из реальной stream-записи АЭ, полученной
при сопровождении испытания на растяжение чистого α-Fe с помощью аппаратуры «Physical
Acoustics Corporation (PAC)» (США). С образца АЭ регистрировалась широкополосным пьезо-
преобразователем «PICO» в полосе рабочих частот 50—1200 кГц, затем усиливалась на 60 дБ
усилителем типа «2/4/6» с последующей оцифровкой и записью платой аналого-цифрового пре-
образования «PCI-2» с частотой дискретизации 2 МГц и амплитудным разрешением 16 бит. Из
этой же записи АЭ был вырезан фрагмент реального шума, который был записан непосредствен-
но перед началом испытания.
Далее из полученных восьми сигналов был сконструирован временной ряд АЭ, имитирующий
тестовую stream-запись АЭ, содержащую тысячу событий. Времена появления сигналов в записи
генерировались случайно, образовывая процесс Пуассона. Последовательность появления записей
отобранных сигналов также задавалась случайным законом равномерного распределения, т.е. при-
сутствие каждого из восьми типов сигналов в общем потоке было равновероятно, а временные
расстояние между событиями случайны и независимы. При этом для каждого варианта тестовых
stream-записей, содержащих 1000 сигналов, для каждого специального сигнала было точно извест-
но количество отсчетов и его временное положение. В результате, итоговая тестовая stream-запись
Дефектоскопия
№ 3
2022
Оценка вероятности обнаружения акустико-эмиссионных сигналов методом амплитудной...
9
а
б
80
12
Сигнал 1
Сигнал 2
6
40
0
0
-6
-40
-12
80
0
400
800 1200
0
400
800
1200
40
12
Сигнал 3
Сигнал 4
6
0
0
-40
-6
80
-12
40
0
200 400
600 800
0
200
400
600
0
12
Сигнал 5
Сигнал 6
-40
6
80
0
-6
40
-12
0
0
100
200
300
0
100
200
300
-40
12
80
Сигнал 7
Сигнал 8
6
40
0
0
-6
-12
-40
0
400
800
0
200
400
0
0,025
0,05
0,075 0,1 0,125 0,15 0,175 0,2
Время, отсчеты
Время, с
Рис. 5. Общий вид формы сигналов АЭ, отобранных из записи испытания на растяжение чистого α-Fe для проведения
экспериментальных исследований (а), и общий вид фрагментов тестовых stream-записей, содержащие 1000 сигналов
АЭ (б), показанных на рис. 5а и смешанных с реальным шумом, нормированным для имитации пяти уровней SNR,
приведенных в табл. 1.
АЭ имела довольно большое сходство с реальными записями АЭ, регистрируемыми при деформа-
ции материалов, поскольку тестовые события существенно отличаются по амплитудным, времен-
ным и спектральным характеристикам и имеют неопределенность времени прихода. Последнее
заключается в том, что события АЭ могут происходить одно за другим или через относительно
большой интервал тишины. Перекрытие сигналов при этом исключалось условиями конструиро-
вания тестовой stream-записи.
Таблица
1
Значения SNR (в дБ) для восьми сигналов в пяти тестовых stream-записях
Номер сигнала
Запись №
1
2
3
4
5
6
7
8
1
6,0
7,2
7,8
4,2
3,7
21,5
6,8
4,3
2
0
1,2
1,8
-1,9
-2,3
15,5
0,8
-1,7
3
-3,5
-2,3
-1,7
-5,4
-5,9
12,0
-2,7
-5,2
4
-6,5
-4,8
-4,2
-7,9
-8,4
9,5
-5,2
-7,7
5
-8,0
-6,7
-6,2
-9,8
-10,3
7,5
-7,2
-9,7
Затем на тестовый сигнал накладывался нормированный шум. Константа, нормирующая ам-
плитуду шума, задавалась таким образом, чтобы сымитировать пять различных степеней зашум-
ления, соответствующих разному соотношению SNR. Значения SNR для каждого типа сигнала и
каждого уровня шума, рассчитанные по выражению (10), сведены в табл. 1.
Дефектоскопия
№ 3
2022
10
И.А. Растегаев, И.С. Ясников, И.И. Растегаева и др.
2
RMS
s
SNR
дБ
=10lg
,
(10)
RMS
n
где RMSs и RMSn — соответственно среднеквадратичное значение сигнала и шума:
T
1
RMS
=
a t)
(11)
∑
i
T
0
Далее пять тестовых stream-записей АЭ многократно прогоняли через пороговый амплитудный
детектор и определяли количество отсчетов сигналов и шума, превышающих уровень амплитудной
дискриминации. При этом использовалось шесть уровней порога, величина которых задавалась
соотношением: ath/σ1 = 1 (0 дБ); 0,5 (-6 дБ); 0,1 (-20 дБ); 0,01 (-40 дБ); 2 (+6 дБ); 10 (+20 дБ) и
100 (+ 40 дБ). Экспериментальное значение Рос получали по следующему выражению, которое
является аналогом выражений (2) и (7):
a >a
a >a
∑
s
th
∑
n
th
−
a
a
∑
s
∑
n
P
=
,
(12)
oc
a >a
a >a
∑
s
th
∑
n
th
+
a
a
∑
s
∑
n
где Σas>ath и Σan>ath — соответственно сумма отсчетов сигнала и шума, превышающих уро-
вень порога, а Σas и Σan — соответственно общая сумма отсчетов в сигнале и шуме. В вычисли-
тельном эксперименте при определении Σas>ath и Σan>ath использовалась вся тестовая stream-
запись, в которой по результатам конструирования время начала и окончания каждого сигнала
были известны с точностью до отсчета. Теоретическое значение Рос определяли по выражению
(7) с подстановкой величин as, an, σ2 и σ1, полученных для каждого сигнала по каждой тестовой
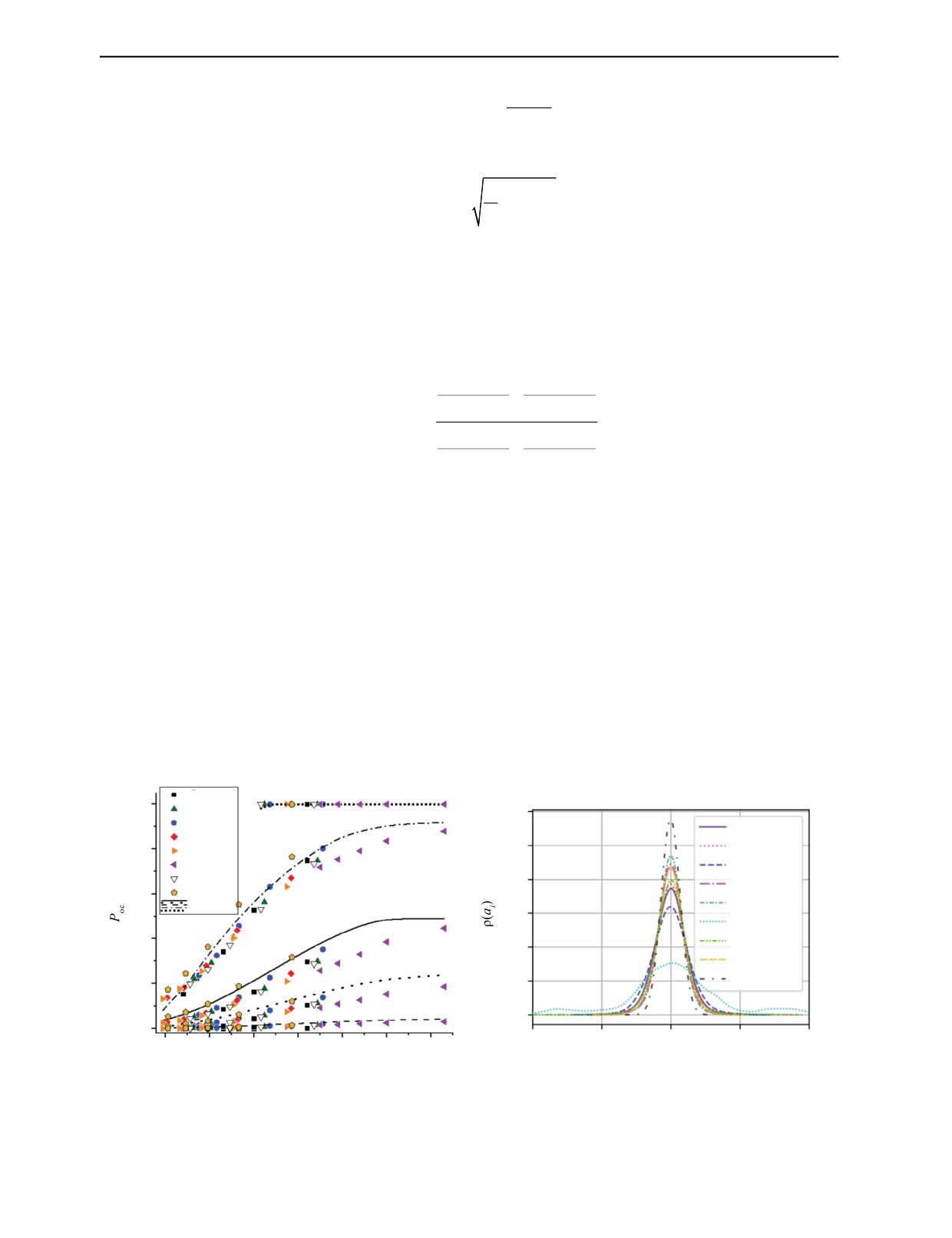
stream-записи АЭ. Результат сопоставления экспериментальных и теоретических значений Рос по
каждому типу сигнала представлен на рис. 6а, который показывает хороший уровень совпаде-
ния. При этом несколько заниженные экспериментальные значения Рос для всех сигналов, кроме
3, 1 и 8, объясняются большим отличием формы их амплитудного распределения от нормально-
го, использовавшегося в модели в качестве приближения, что видно из рис. 6б. Следовательно,
точность предлагаемого подхода может быть повышена путем подстановки в выражение (2)
функции амплитудного распределения, построенного непосредственно по записи формы реаль-
а
б
Сигнал 1
ath - σ1
= +10 дБ
1,0
Сигнал 2
0,30
ath - σ1 = +6 дБ
Сигнал 3
Сигнал 1
Сигнал 4
0,25
Сигнал 2
0,8
Сигнал 5
Сигнал 6
Сигнал 3
Сигнал 7
0,20
Сигнал 4
0,6
Сигнал 8
Теория
ath - σ1 = 0 дБ
Сигнал 5
0,15
Сигнал 6
0,4
Сигнал 7
0,10
ath - σ1 = -6 дБ
Сигнал 8
0,2
0,05
Шум
ath - σ1 = -20 дБ
0,00
0,0
-20
-10
0
10
20
-10
-5
0
5
10
15
20
ai, дБ
SNR, дБ
Рис. 6. Результат сопоставления экспериментальных и теоретических значений Рос по каждому типу сигнала (а) и общий
вид распределений выбросов амплитуды ai в отсчетах сигналов и шума в первой тестовой stream-записи АЭ (б).
Дефектоскопия
№ 3
2022
Оценка вероятности обнаружения акустико-эмиссионных сигналов методом амплитудной...
11
ного сигнала, а выражение (7) может быть использовано для выполнения предварительных оце-
нок. Кроме этого, экспериментальная оценка показала необходимость введения правил, устра-
няющих неопределенность и обеспечивающих сходимость с экспериментальными данными в
граничных и приграничных областях соотношений as и/или an к ath, а именно:
при
a
>
a
без расчета принимаетсяP
=
0
th
s
oc
a
a
s
n
пусть
2⋅
f
(
a,D
)
da
−2⋅
f
(
a,D
)
da = A,то при
A<
0принимается
A
∫
2
∫
1
a
th
a
th
(13)
a
s
a
n
пусть
2⋅
f
(
a,D
)
da
+2⋅
f
(
a,D
)
da = B,то при
B
<
0принимается
B
∫
2
∫
1
a
th
a
th
−4
4
при
A
или
B
<1⋅10
принимается
A
или
B
=1⋅10-
ВЫВОДЫ И ЗАКЛЮЧЕНИЕ
В работе предложен подход к оценке вероятности обнаружения сигнала в широком диапазоне
SNR на основе анализа распределения амплитуд сигнала и шума в каждом конкретном фрагменте
записи АЭ. Указанный подход имеет ряд существенных преимуществ:
1) он универсальный, т.к. позволяет анализировать кадры записи АЭ, зарегистрированные как
по превышению порога, так и в беспороговом режиме записи АЭ;
2) он позволяет оценить эффективность применения амплитудного детектора для обнаружения
сигналов на уровне шума по каждому их типу (виду) с учетом их трансформации при распростра-
нении по объекту или без учета нее, как до, так и после применения процедур фильтрации и шу-
моподавления записей АЭ. При этом форма сигнала (импульсная или непрерывная АЭ, одно- или
многомодальная) не играет особого значения, т.к. в предложенной расчетной схеме она по отсчетам
сводится к функции распределения выбросов амплитуды в кадре записи АЭ, что нивелирует вли-
яние как формы сигнала, так и наличия нескольких однотипных неперекрывающихся сигналов в
анализируемом фрагменте записи;
3) он применим для оценки Рос при одновременном действии нескольких источников АЭ, гене-
рирующих волны сопоставимой амплитуды.
Для повышения точности оценки вероятности обнаружения импульсных сигналов их функ-
ции распределения выбросов амплитуды следует получать по экспериментальным или модель-
ным данным, а в случае анализа сигналов непрерывного вида может быть достаточно использо-
ванного в работе допущения о нормальном распределении. Установлено, что амплитудное детек-
тирование сигналов возможно, начиная с уровня порога ath > an + 0,9 дБ, при наличии выбросов
амплитуды в шуме не более an = σ1 - 7,5 дБ при as > σ2 + 6 дБ и an = σ1 - 11 дБ при as ≈ σ2. В
противном случае качественное и устойчивое детектирование сигнала по порогу в амплитудно-
временной области анализа АЭ не может быть обеспечено и поэтому следует переходить на ис-
пользование альтернативных способов обнаружения сигналов в шуме (использование критериев
оценки разладки временного ряда [18—20] или изменения спектральных характеристик [21], или
др. способов выявления признаков сигнала в шуме).
Работа выполнена при частичной финансовой поддержке гранта Российского научного фонда
№ 20-19-00585.
СПИСОК ЛИТЕРАТУРЫ
1. Hase A. Early detection and identification of fatigue damage in thrust ball bearings by an acoustic
emission technique // Lubricants. 2020. V. 8. No. 3. P. 37.
2. Stepanova L.N., Chernova V.V., Ramazanov I.S. Acoustic emission testing of early generation of defects
in cfrp samples under static and thermal loading // Russian Journal of Nondestructive Testing. 2020. V. 56.
No 10. P. 784—794.
3. Choe C., Chen C., Nagao S., Suganuma K. Real-time acoustic emission monitoring of wear-out failure
in SiC power electronic devices during power cycling tests // IEEE Transactions on Power Electronics. 2021.
V. 36. No. 4. P. 4420—4428.
Дефектоскопия
№ 3
2022
12
И.А. Растегаев, И.С. Ясников, И.И. Растегаева и др.
4. Rodgers M. The Use of a Floating Threshold for Online Acoustic Emission Monitoring of Fossil High
Energy Piping: Newsletter // Acoustic Emission Consulting. 1994. Ver. 1. 6 p.
5. Stepanova L.N., Ramazanov I.S., Kanifadin K.V. Estimation of time-of-arrival errors of acoustic-emission
signals by the threshold method // Russian Journal of Nondestructive Testing. 2009. V. 45. No. 4. P. 273—279.
6. Stepanova L.N., Kanifadin K.V., Ramazanov I.S., Kabanov S.I., Lebedev E.Y. Clustering of sources of
acoustic-emission signals by the leading-edge rise rate // Russian Journal of Nondestructive Testing. 2009.
V. 45. No. 10. P. 685—692.
7. Гук В.И., Наконечная О.А. Алгоритмы численного определения временных характеристик сиг-
налов акустической эмиссии // Математическое и компьютерное моделирование. Серия: Технические
науки. 2012. Вып. 6. С. 73—87.
8. Davydova D.G., Kuz’min A.N., Rizvanov R.G., Aksel’rod E.G. Identification of acoustic emission sources
during testing of technological equipment with a high noise level // Russian Journal of Nondestructive Testing.
2015. V. 51. No. 5. P. 292—302.
9. Barat V., Borodin Y., Kuzmin A. Intelligent AE signal filtering methods // Journal of Acoustic Emission.
2010. V. 28. P. 109—119.
10. Костюков В.Н., Науменко А.П. Оценка риска выбора нормативных величин диагностических
признаков // Динамика систем, механизмов и машин. 2014. No. 4. C. 150—154.
11. Tang J., Soua S., Mares C., Gan T.-H. An experimental study of acoustic emission methodology for in
service condition monitoring of wind turbine blades // Renewable Energy. 2016. V. 99. P. 170—179.
12. Ivanov V.I., Vlasov I.E. Some problems of nondestructive testing // Russian Journal of Nondestructive
Testing. 2002. V. 38. No. 7. P. 547—556.
13. Khoroshavina S.G. Probabilistic models for estimating the acoustic-emission test confidence for
composite materials in point and bracket versions // Russian Journal of Nondestructive Testing. 2000. V. 36.
No. 3. P. 175—181.
14. Barat V., Marchenkov A., Ivanov V., Bardakov V., Elizarov S., Machikhin A. Empirical approach
to defect detection probability by acoustic emission testing // Applied Science. 2021. V. 11. Is.
20.
Art. number 9429. 18 p.
15. Sause M.G.R., Linscheid F.F., Wiehler M. An experimentally accessible probability of detection model
for acoustic emission measurements // Journal of Nondestructive Evaluation. 2018. V. 37. Is. 2. Art. number
17. 12 p.
16. Pollock A.A. A PoD model for acoustic emission — Discussion and status // AIP Conference Proceedings.
2010. V. 1211. P. 1927—1933.
17. Builo S.I., Builo B.I., Chebakov M.I. Probalistic-information approach to assessing the reliability of the
results of the acoustic-emission method of testing and diagnostics // Russian Journal of Nondestructive Testing.
2021. V. 57. P. 375—382.
18. Sedlak P., Hirose Y., Khan S.A., Enoki M., Sikula J. New automatic localization technique of acoustic
emission signals in thin metal plates // Ultrasonics. 2009. V. 49. P. 254—262.
19. Van der Baan M., Vaezi Y. Comparison of the STA/LTA and power spectral density methods for
microseismic event detection // Geophysical Journal International. 2015. V. 203. P. 1896—1908.
20. Agletdinov E., Merson D., Vinogradov A. New method of low amplitude signal detection and its
application in acoustic emission // Applied Sciences. 2020. V. 10. No. 1. P. 73.
21. Rastegaev I.A., Merson D.L., Rastegaeva I.I., Vinogradov A.Yu. A time-frequency based approach for
acoustic emission assessment of sliding wear // Lubricants. 2020. V. 8. No. 5. P. 52.
Дефектоскопия
№ 3
2022