УДК 620.179.14
АНАЛИЗ ДАННЫХ ЗОНДИРОВАНИЯ ГЕОРАДАРОМ ДЛЯ ТОЧНОЙ ОЦЕНКИ
ДИАМЕТРА ПОДЗЕМНЫХ КОММУНИКАЦИЙ
© 2022 г. Рим Гоззи1,2,*, Самер Лахвар1, 3, Чокри Суани1,4
1 Университет Монастира, Окружающая среда авеню, 5000 Монастир, Тунис
2 Университет Суса, Технополь Новейшн-Сити Суса, 4023 Сус, Тунис
3 Центр исследований микроэлектроники и нанотехнологий,
ЦИМН, Технополь Новейшн-Сити Суса, 4054 Сус, Тунис
4 Высший институт прикладных наук и технологий Суса, 4003 Сус, Тунис
Поступила в редакцию 06.12.2021; после доработки 07.01.2022
Принята к публикации 14.01.2022
Подповерхностная радиолокационная станция (РЛС) — это система дистанционного зондирования, способная
обнаруживать и определять местонахождение подземных коммуникаций неразрушающим способом. Однако оценка диа-
метра этих инженерных коммуникаций по исходным РЛС-изображениям остается проблематичной. Точное измерение
не может быть произведено непосредственно из результатов данных РЛС-сканирования. В данной статье проводится
анализ РЛС-сканов для измерения диаметра в однородной среде подземных коммуникаций. Анализ основан на геоме-
трической и математической модели. Также исследуется неопределенность параметров модели, чтобы охарактеризовать
различия между фактическими выходными значениями и выходными значениями модели. В этом анализе используются
два фактора неопределенности: глубина и относительная диэлектрическая проницаемость. Данные РЛС-сканирования,
использованные в анализе, были сгенерированы с помощью численного симулятора gprMax, в котором используется
метод конечных разностей во временной области (КРВО). Также экспериментальные данные используются для оценки
диаметра проложенных в грунте водопроводных труб. Эта статья улучшает оценку диаметра проложенных в грунте
коммуникаций. Результаты моделирования подтверждают правильность используемой модели.
Ключевые слова: оценка диаметра цилиндрического объекта, подповерхностная радиолокационная система (РЛС),
гиперболическое отражение, неразрушающий контроль (НК), анализ чувствительности (АЧ).
DOI: 10.31857/S0130308222030034
1. ВВЕДЕНИЕ
Подповерхностная радиолокационная система (РЛС) — система, действие которой основано
на отражении электромагнитных (ЭМ) волн. Такой система известна под многими названиями,
включая подповерхностную радиолокацию, георадар и подповерхностную проникающую радио-
локацию. С 1980-х годов подповерхностная РЛС все чаще используется в качестве средства для
неразрушающего контроля (НК) при проведении геофизических [1, 2], археологических [3, 4],
инженерных [5, 6] исследований.
В последние годы более широкое использование подповерхностных РЛС выявило задачу улуч-
шения не только всей системы, но и методов, необходимых для обработки и правильной интерпре-
тации РЛС-данных. Одной из задач РЛС-исследований является оценка диаметра таких заглублен-
ных длинных цилиндрических объектов, как, например, трубы. Также важно знать параметры,
которые будут иметь наибольшее влияние на ее правильную оценку. В этом смысле анализ чув-
ствительности (АЧ) используется, чтобы проанализировать данный эффект [7]. В статье представ-
лено исследование чувствительности двух моделей, которые можно использовать для оценки диа-
метра залегающего под землей цилиндра с помощью подповерхностной РЛС:
модель 1, которая представлена Ghozzi и др. в [8]. Она основана на использовании отличительных
РЛС-признаков залегающего цилиндрического объекта, полученных при нескольких измерениях;
модель 2 представлена Zhang и др. в [9]. Она основана на форме определенных полуокружно-
стей, образованных координатами трех точек, и геометрической связи между точечными отража-
телями на верхнем краю заглубленной трубы и местами расположения зондов.
РЛС-данные, использованные в этом анализе, были сгенерированы числовым симулятором
gprMax, который использует метод конечных разностей во временной области (КРВО) для имита-
ции РЛС-отражений. Также использовались полевые РЛС-данные, собранные с помощью геора-
дарной системы GSSI SIR-3000.
Статья построена следующим образом. Описание моделей и процедуры анализа описаны в
разделе 2. В разделе 3 представлены полученные результаты и их обсуждение, соответственно на
основе численного моделирования и экспериментальных исследований. Наконец, выводы пред-
ставлены в разделе 4.
24
Рим Гоззи, Самер Лахвар, Чокри Суани
2. МЕТОДОЛОГИЯ
2.1. Описание модели
Подповерхностная РЛС — это устройство, способное передавать и принимать импульсные
ЭМ-волны, что позволяет обнаруживать скрытые объекты или границы раздела сред. Схемати-
ческое изображение измерительной РЛС-системы показано на рис. 1a. Главным образом, работа
системы заключается в излучении передающей антенной короткого ЭМ-импульса, а затем запи-
си отраженных сигналов, создаваемых любой границей раздела, на которой имеется различие в
диэлектрической проницаемости. Изменения диэлектрической проницаемости и электропровод-
ности в значительной степени влияют на дифракцию электромагнитных волн, которые улавли-
ваются приемной антенной [10]. РЛС-приемник измеряет и записывает амплитуду электрическо-
го поля (или напряженность поля, В/м) как функцию времени. Таким образом, записанный
амплитудно-временной сигнал обычно называют А-сканом. Антенны обычно перемещаются по
определенным направлениям, поэтому добавляется пространственная информация по оси Х.
Двустороннее распространение зависит от параметров диаграммы направленности антенны и
параметров сканируемой среды. Отражения с наибольшей амплитудой ожидаются там, где поля-
ризация электрического поля параллельна длинной оси объекта [6]. Записанный B-скан компо-
ненты электрического поля Ez показан на рис. 1б. Нелинейная кривая, наблюдаемая на изобра-
жении (радарограмме), полученном с помощью РЛС, указывает на наличие в объекте цилиндри-
ческого отражателя.
a
б
Направление сканирования
Передающая/приемная
антенна
А-скан датчика
Положение датчика 1
Положение датчика 3
X
0
Воздух
200
Подповерхность
Y
2
150
100
4
Двустороннее
50
распространение
6
0
Объект
-50
8
-100
10
-150
-200
12
50
100
150
Ось Х, см
Рис. 1. Схема получения данных РЛС над залегающим цилиндрическом объектом (a); результирующие РЛС-данные гео-
физического исследования (B-скан) (б).
Распространение РЛС-волн в диэлектрической среде можно промоделировать с помощью
программы gprMax, разработанной Dr. Giannopoulos в 1996 г. Она основан на методе КРВО [11].
Новая улучшенная версия этого программного обеспечения была предложена Warren и др. [12].
Новая версия может выполнять 2D или 3D-моделирование распространения ЭМ-поля подпо-
верхностной РЛС.
Основная цель этого раздела — представить два примера двухмерных моделей в gprMax,
содержащих несколько заглубленных цилиндрических объектов. Эти модели аналогичны моделям
Ghozzi и др. [8] и Чжан и др. [9]. Был проведен эксперимент, в котором варьировались две пере-
менные: глубина и относительная диэлектрическая проницаемость залегающего цилиндрического
объекта.
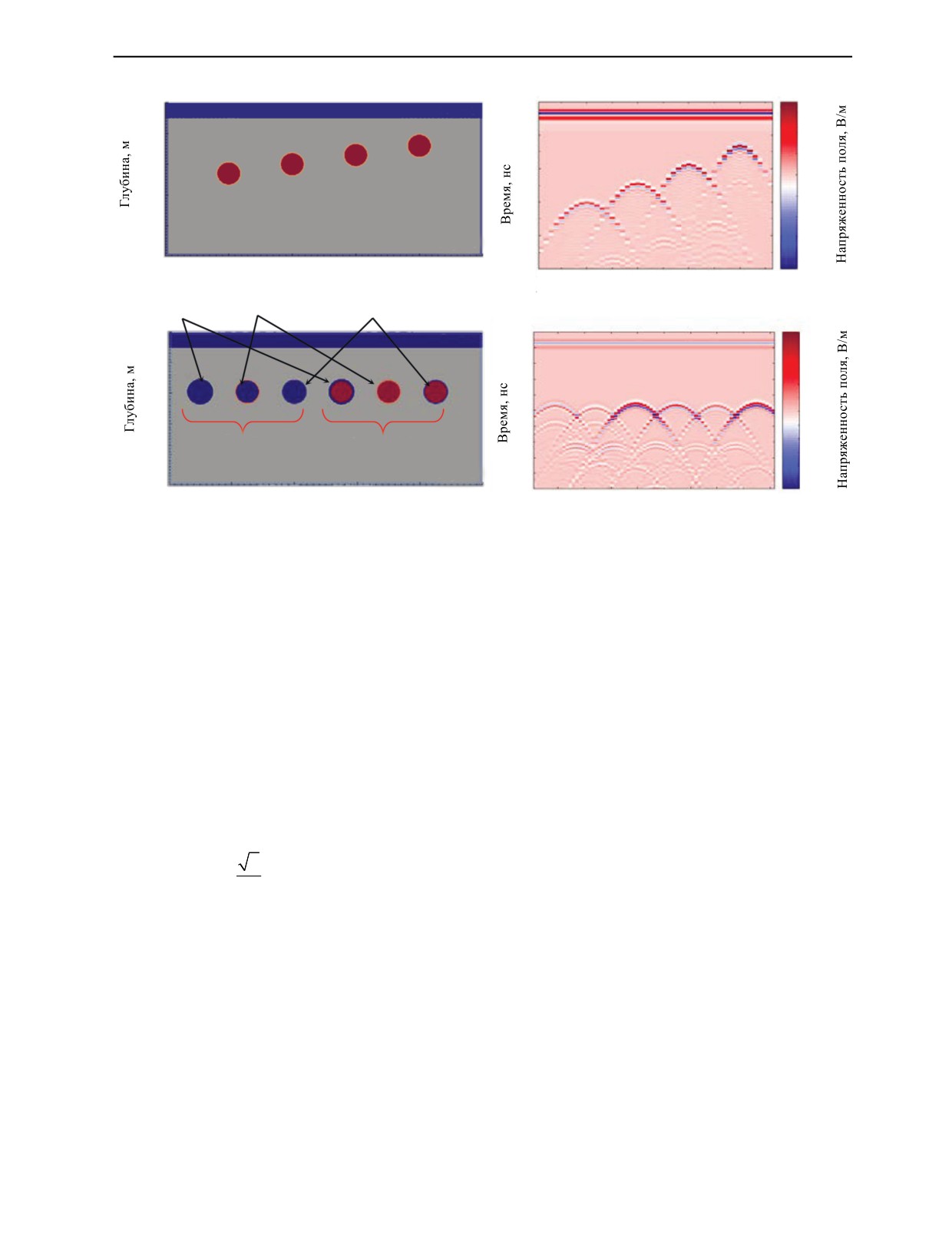
На рис. 2 представлены строение моделей с использованием программы ParaView, а также
радарограмма (B-Scan) в MATLAB. Первая модель содержит четыре заглубленных цилиндриче-
Дефектоскопия
№ 3
2022
Анализ данных зондирования георадаром для точной оценки диаметра подземных коммуникаций
25
а
б
0,0
0
Слой 1
150
5
1,0
10
100
15
50
2,0
20
0
25
3,0
-50
30
-100
35
4,0
40
-150
Слой 2
5,0
45
-200
0
2
4
6
8
10
50
1
2
3
4
5
6
7
8
9
Ось сканирования, м
Ось сканирования, м
Полость
Бетон
Металл
0,0
0
Слой 1
250
5
200
1,0
10
150
15
100
2,0
20
50
25
0
3,0
30
-50
Без воды
С водой
35
-100
4,0
40
-150
-200
Слой 2
45
5,0
50
-250
0
2
4
6
8
10
1
2
3
4
5
6
7
8
9
Ось сканирования, м
Ось сканирования, м
Рис. 2. 2D-модель и B-скан бетонных цилиндрических объектов, залегающих на разных глубинах и заполненных водой
(a); 2D-модель и B-скан залегающих цилиндрических объектов из различных материалов [8, 9] (б).
ских объекта, заполненных водой и расположенных на разной глубине (рис. 2а). Модель состоит
из двух слоев и имеет высоту 5 м и ширину 10 м. Передающая/приемная антенны расположены в
первом слое (воздушном), имеющем толщину 0,5 м. Расстояние между двумя антеннами составля-
ет 20 см, а зазор между антеннами и поверхностью земли составляет 2 см. Второй слой представ-
ляет собой слой глины с электропроводностью 0,01 мСм/м и относительной диэлектрической
проницаемостью 8. Слой содержит четыре цилиндрических объекта, параллельных оси Y. Интер-
вал времени для регистрации РЛС-данных был установлен на 50 нс, а количество записей было
установлено на 46 (то есть B-скан содержит 46 A-сканов). Волна Рикера — это форма волны пере-
дающей антенны с амплитудой, равной единице, и центральной частотой 500 МГц. Волна Рикера
(или мексиканская шляпа) представляет собой отрицательную нормализованную вторую произво-
дную формы волны Гаусса. Эта форма волны определяется уравнением [13]:
2
(
t−χ
)2
g t)=-
(
2ξ
(
t
−χ
)
−1
)
e-ξ
,
(1)
2
где ξ = π2f2,
χ=
и f — частота.
f
Вторая модель содержит шесть заглубленных цилиндрических объектов из разных материалов:
воздуха, бетона и металла. На рис. 2б показаны трубы; три первые трубы (полая, бетонная и метал-
лическая) пусты, а три последние заполнены водой. На рисунке также показаны РЛС-сканы этих
труб. Диаметры всех шести труб 0,8 м при толщине стенки 0,05 м и глубине 1 м. Количество запи-
сей установлено на 75, а все остальные характеристики аналогичны первой модели. В табл. 1 пред-
ставлены описание 2D-модели и параметры антенны, использованные при моделировании в
gprMax.
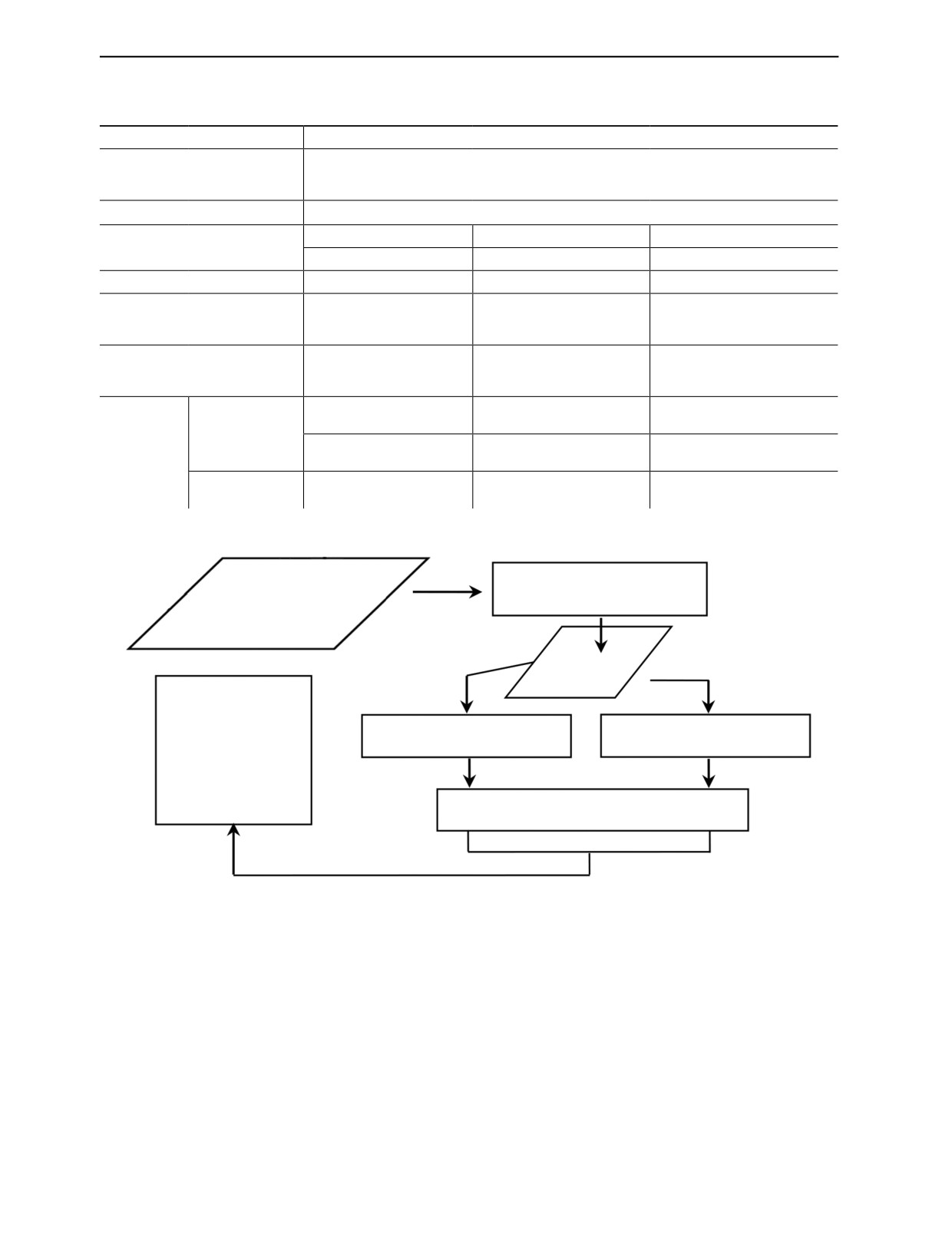
2.2. Процедура анализа
Основная процедура анализа влияния двух источников погрешности на чувствительность
модели показана на рис. 3. В этом анализе используются два источника погрешности: глубина и
относительная диэлектрическая проницаемость заглубленного цилиндрического объекта. Анализ
Дефектоскопия
№ 3
2022
26
Рим Гоззи, Самер Лахвар, Чокри Суани
Таблица
1
Описание параметров моделей
Ширина/высота модели
10 м/ 5 м
Пространственная
дискретизация
0.01
Δx = Δy, м
Δt, с
2.35e-11
Тип
Амплитуда
Частота (МГц)
ЭМ-источник
Волна Рикера
1
500
Материал
Глина
Бетон
Вода
Относительная
диэлектрическая
8
6
81
проницаемость, εr
Удельная электропроводность
0,01
0
0,5
σ, мСм/м
Толщина, м
Материалы
Диаметр, м/Глубины, м
Первая модель
0,8/1,4, 0,8/1,1, 0,8/0,8 и
Объект
0,05
Бетон, заполненный водой
0,8/0,5
Воздух, бетон, метал с
Вторая модель
0,05
0,8/1
водой/без воды
Входные
переменные:
Моделирование
Глубина (d0);
Относительная диэлектрическая
проницаемость (εr)
Электрическое
поле
Анализ
чувствительности
Модель
Модель
неопределенности 1
неопределенности 2
Распространение
погрешностей
Выходные данные:
Диаметр (D)
Рис. 3. Блок-схема исследования.
чувствительности используется для обнаружения источника, который оказывает наибольшее вли-
яние на оценку диаметра цилиндра. В этой работе важно разработать эксперимент, который может
выявить взаимосвязь между откликом и входными данными. Наиболее естественным способом
планирования исследования является использование метода раздельного исследования факторов
[14], который изменяет один фактор за раз, а остальные остаются неизменными, т.е. фиксирован-
ными.
По модели 1 диаметр можно определить с помощью нескольких расположений зондирования
(А-сканов), полученных по радарограмме. Для оценки этого параметра были предприняты следу-
ющие шаги. Первоначально к отраженным сигналам применяется преобразование Гильберта [15],
чтобы выделить огибающую сигнала. Далее были оценены времена прохождения первых двух
максимальных пиков для каждой из полученных огибающих (используя функцию findpeaks
Дефектоскопия
№ 3
2022
Анализ данных зондирования георадаром для точной оценки диаметра подземных коммуникаций
27
MATLAB в Signal Processing Toolbox). Затем пики использовались для оценки времени прохожде-
ния от точки измерения на поверхности земли до границы раздела грунт—труба на верхнем краю
трубы. После этого, когда передающие/приемные антенны располагались непосредственно над
трубой, регистрировались строки сканирований. Желаемое положение определялось путем опре-
деления абсциссы (x-координата x0) вершины нелинейной кривой, наблюдаемой на радарограмме.
Различающиеся локальные максимумы кривой также были обнаружены функцией findpeaks
MATLAB. Последний шаг состоял в применении теоремы Пифагора для получения математиче-
ской модели гиперболы. Путем выбора восьми пиков, ближайших к вершине кривой, наконец,
была проведена гиперболическая аппроксимация уравнения (2) [16] для оценки диаметра трубы.
Аппроксимация выполнялась функцией аппроксимации кривой в MATLAB, в Curve Fitting
Toolbox:
2
ε
D
D
r
2
2
t
=
−
+
x
+(d
+
)
(2)
0
c
2
2
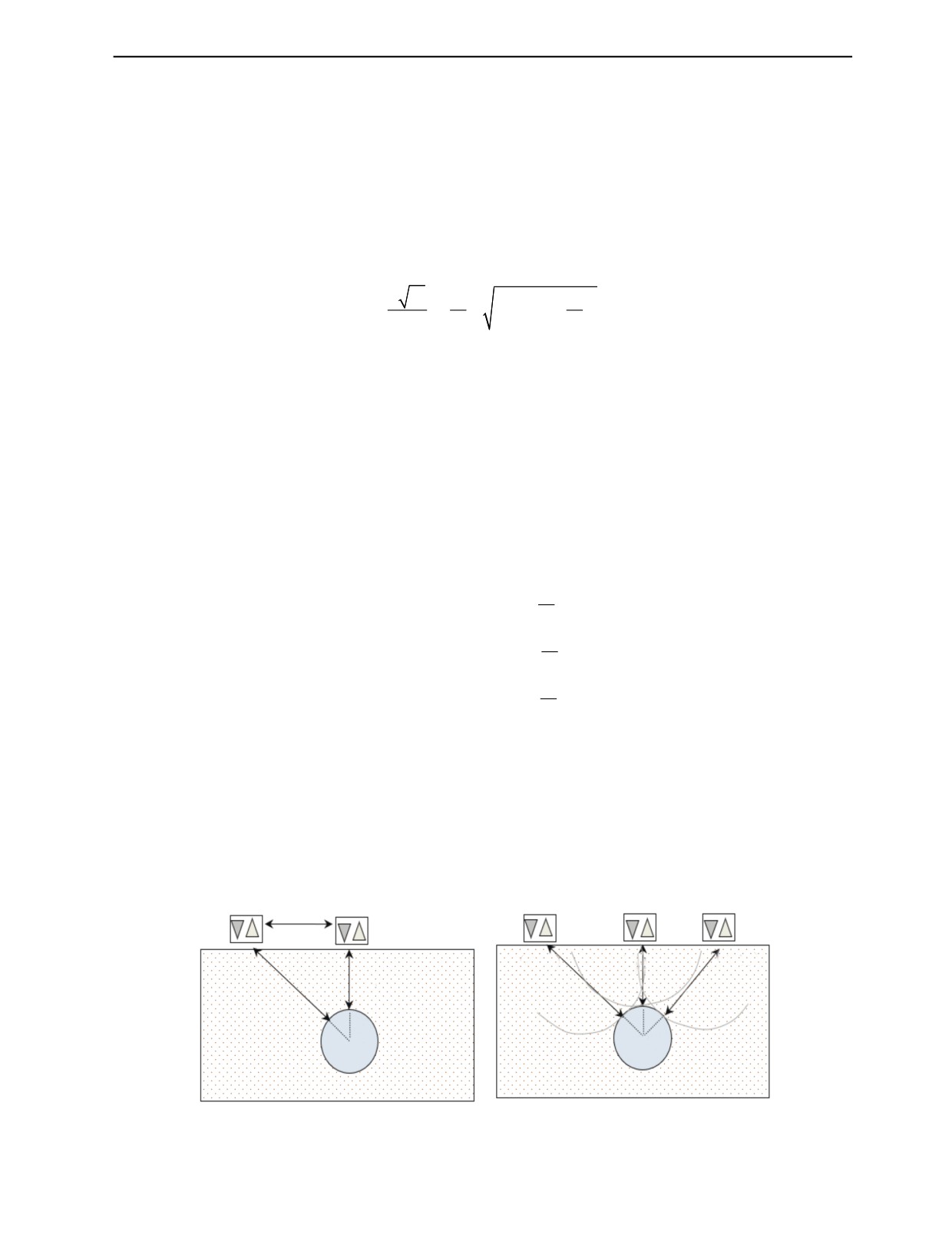
В модели 2 диаметр рассчитывался по форме определенных полуокружностей, заданных коор-
динатами трех точек и геометрической привязкой между точечными отражателями на верхней
кромке заглубленной трубы и местами зондирования [9]. Время прохождения отраженной электро-
магнитной волны и скорость электромагнитной волны в подповерхностной среде использовались
для оценки радиусов трех полуокружностей (уравнение (3)). Время прохождения — это время, за
которое волна проходит от точки измерения на поверхности земли до границы раздела трубы с
грунтом на верхней крышке трубы и обратно.
r
1
,r
2
,r
3
=
v⋅
(
t
1
,t
2
,t
3
)
(3)
Для оценки диаметра использовались уравнения:
2
2
D
2
(x- x
)
+(y- y
)
=
(
+
r )
1
1
1
2
2
2
D
2
(x- x
)
+(y- y
)
=
(
+
r
)
,
(4)
2
2
2
2
2
2
D
2
(x- x
)
+(y- y
)
=
(
+
r
)
3
3
3
2
где (x1, y1), (x2, y2), (x3, y3) — координаты положений трех датчиков, а r1, r2, r3 — радиусы трех полу-
окружностей.
Рис. 4 иллюстрирует геометрическое описание двух моделей.
а
б
Положение
Положение
Положение
Положение
Положение
датчика 1
датчика 2
датчика 1
датчика 2
датчика 3
x
Уровень земли
(x1, y1)
(x3, y3)
(x2, y2)
d0, t0
r2
d, t
r1
r3
(x, y)
Рис. 4. Геометрия 2D-моделей для РЛС-измерений: модель 1 [8] (a), модель 2 [9] (б).
Дефектоскопия
№ 3
2022
28
Рим Гоззи, Самер Лахвар, Чокри Суани
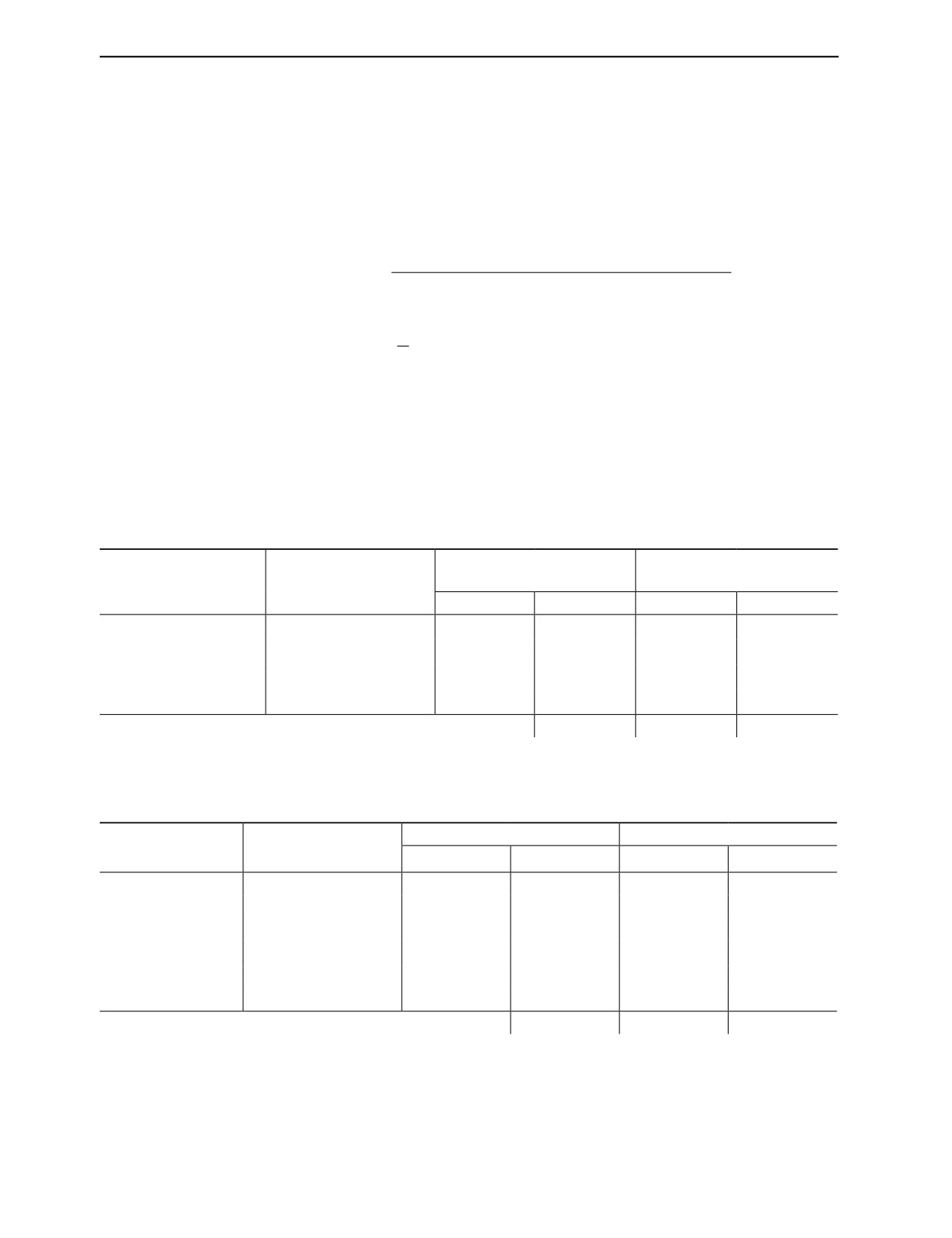
3. РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
3.1. Численное моделирование
Результаты численного моделирования двух геометических моделей, описанных в предыду-
щем разделе, показаны в табл. 2 и 3. Стоит отметить, что диаметр, рассчитываемый по модели 1,
обладает меньшей средней абсолютной процентной ошибкой (МАПО) по сравнению с диаметром,
рассчитываемым по модели 2. МАПО определяется по уравнениям:
|Теоретический диаметр - Реальный диаметр|
Относительная погрешность, % =
× 100 %,
(5)
Реальный диаметр
1
МАПО, % =
∑ Относительная погрешность.
(6)
n
n
Как можно видеть из табл. 2 и 3, модель 1 может оценивать диаметр залегающих цилиндров в
однородной среде с МАПО 0,5 и 0,32 % для двух исследуемых объектов соответственно. С другой
стороны, методика, предложенная по модели 2 Zhang и др. [9], может оценивать тот же параметр
с МАПО 2,56 и 11,17 %.
Таблица
2
Относительная погрешность оценки диаметра для подземных цилиндров на различных глубинах
Теоретический диаметр, см
Относительная ошибка, %
Глубина залегания, м
Реальный диаметр, см
Модель 2
Модель 1
Модель 2
Модель 1
1,4
80
83
80,6
3,75
0,75
1,1
80
82,4
80,8
3,00
1,00
0,8
80
81,6
80,2
2,00
0,25
0,5
80
81,2
80,0
1,50
0,00
МАПО, %
2,56
0,50
Таблица
3
Относительная погрешность оценки диаметра для различных материалов цилиндров
Теоретический диаметр, см
Относительная погрешность, %
Реальный диаметр, см
Модель 2
Модель 1
Модель 2
Модель 1
Полость без воды
80
100,8
79,4
26
0,8
Бетон без воды
80
85,4
79,8
6,8
0,3
Металл без воды
80
80,2
80,0
0,3
0,0
Полость с водой
80
103,8
79,8
29,8
0,3
Бетон с водой
80
77
79,6
3,8
0,5
Металл с водой
80
80,2
80,0
0,3
0,0
МАПО (%)
11,17
0,32
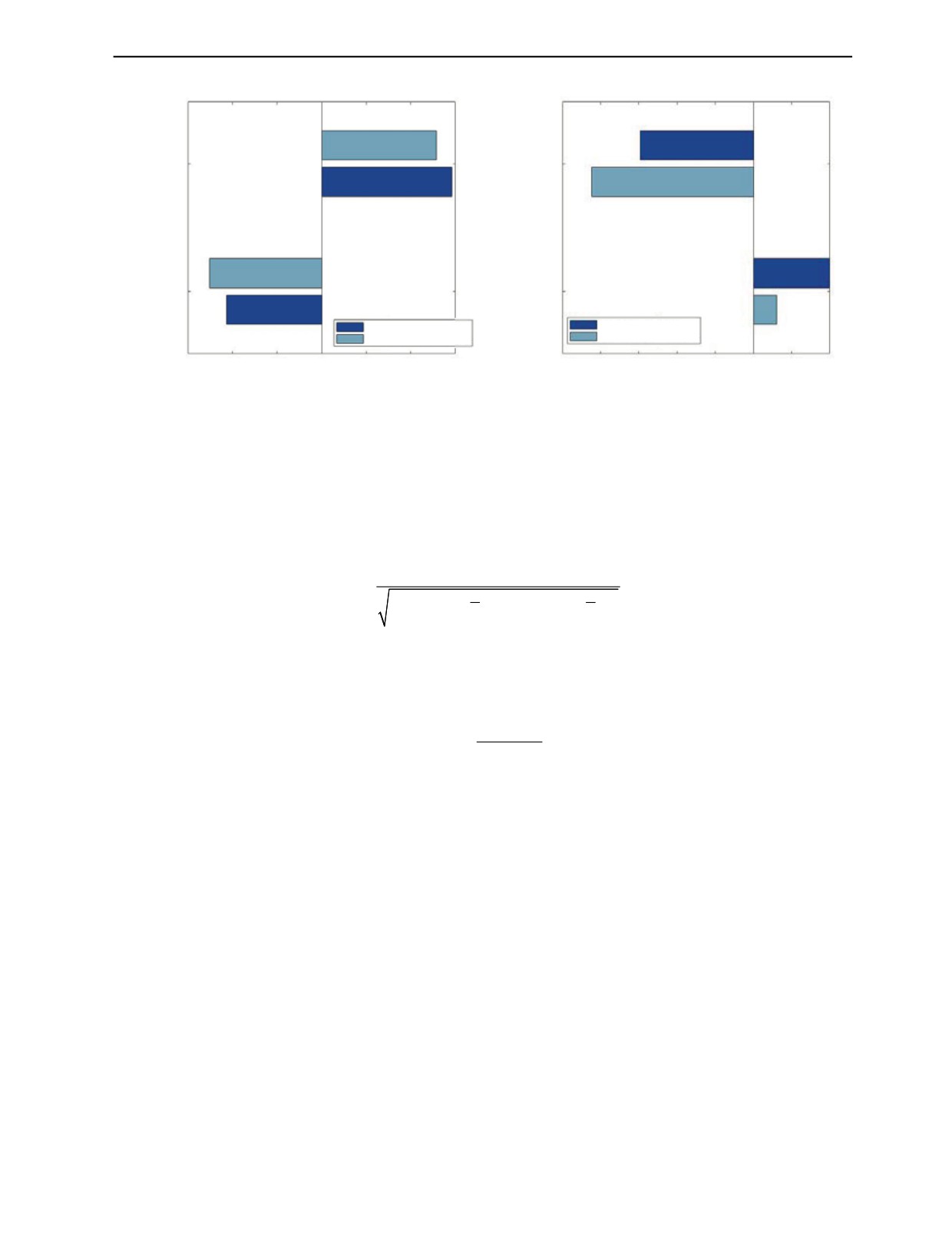
На рис. 5 показаны результаты АЧ для различных параметров. Параметр, оказывающий наи-
большее влияние на результаты моделирования, указан вверху. Результаты анализа иллюстрируют
взаимосвязь параметров (глубина и материал объекта) с относительной погрешностью. В этой
Дефектоскопия
№ 3
2022
Анализ данных зондирования георадаром для точной оценки диаметра подземных коммуникаций
29
а
б
Материал
Глубина
объекта
Материал
Глубина
объекта
Корреляция
Корреляция
Ранговая корреляция
Ранговая корреляция
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
-0,25 -0,2
-0,15 -0,1
-0,05
0
0,05
0,1
Влияние параметра
Влияние параметра
Рис. 5. Результаты анализа чувствительности для двух источников погрешности: модель 1 (а), модель 2 (б).
работе использовались две разные корреляции: корреляция Пирсона и ранговая корреляция Спир-
мена. Корреляция Пирсона предоставляет подробную информацию о линейной зависимости
между двумя рядами данных. Корреляция Спирмена (ранговая корреляция) показывает подробную
информацию о взаимосвязи между ранговыми значениями двух рядов данных. Уравнение коэффи-
циента корреляции Пирсона (R) показано ниже [17]:
n
(
x
−
x
)(
y
−
y
)
∑
i=1
i
i
R
=
,
(7)
n
2
n
2
(
x
−
x
)
(
y
−
y
)
∑
i=1
i
∑
i=1
i
где n — количество значений переменных, x и y — средние величины x и y, xi и yi — значе-
ния переменных x и y с номером i соответственно. Коэффициент корреляции Спирмена опре-
деляется как [17]
n
2
6
d
∑
i
=1
i
R
=
1−
,
(8)
S
2
n
(
n
−
1
)
где di — разность между рангами x и y.
Предыдущие результаты показывают, что наибольшее влияние на результаты для модели 1
оказывает глубина. Однако для модели 2 наибольшее влияние оказывает материал объекта. Корре-
ляция и ранговая корреляция глубины по модели 1 равны 0,58 и 0,51 соответственно. Относитель-
но модели 2 корреляция и ранговая корреляция материала объекта равны -0,14 и -0,21 соответ-
ственно. Следует отметить, что использование модели 1 дает лучшие результаты, чем использова-
ние модели 2.
3.2. Экспериментальное исследование
Экспериментальная подтверждение проводилось в Сусе, расположенном в 140 км к югу от
столицы Туниса (рис. 6). Исследуемый участок содержит заполненную водой бетонную трубу
с внешним диаметром 0,6 м, толщиной 0,06 м, относительной диэлектрической проницаемо-
стью окружающей среды, равной 2,9, и глубиной залегания 0,7 м. На рис. 6 показана исследу-
емая территория и карта инженерных коммуникаций. С использованием картографических
данных коммунальных служб сбор РЛС-данных проводился в направлении, перпендикулярном
трубе.
Подповерхностная РЛС, используемая в работе, представляла собой модель SIR-3000 произ-
водства Geophysical Survey Systems, Inc (GSSI). В этой РЛС используется антенна с частотой
Дефектоскопия
№ 3
2022
30
Рим Гоззи, Самер Лахвар, Чокри Суани
Исследуемый
Бетонная труба
участок
с водой
Рис. 6. Исследуемый участок и карта инженерных коммуникаций.
Таблица
4
Параметры сбора данных георадаром
Количество строк
480
Шаг между строками, м
0,02
Длина участка, м
9,58
Измерения в строке
512
Интервал измерения, нс
0,184
Интервал времени,нс
94
400 МГц. Параметры сбора РЛС-данных, использованные во время съемки, приведены в табл. 4.
Для открытия и отображения файлов георадара, которые были в стандартном файловом формате
GSSI (.DZT), использовался бесплатный пакет MATLAB matGPR [18].
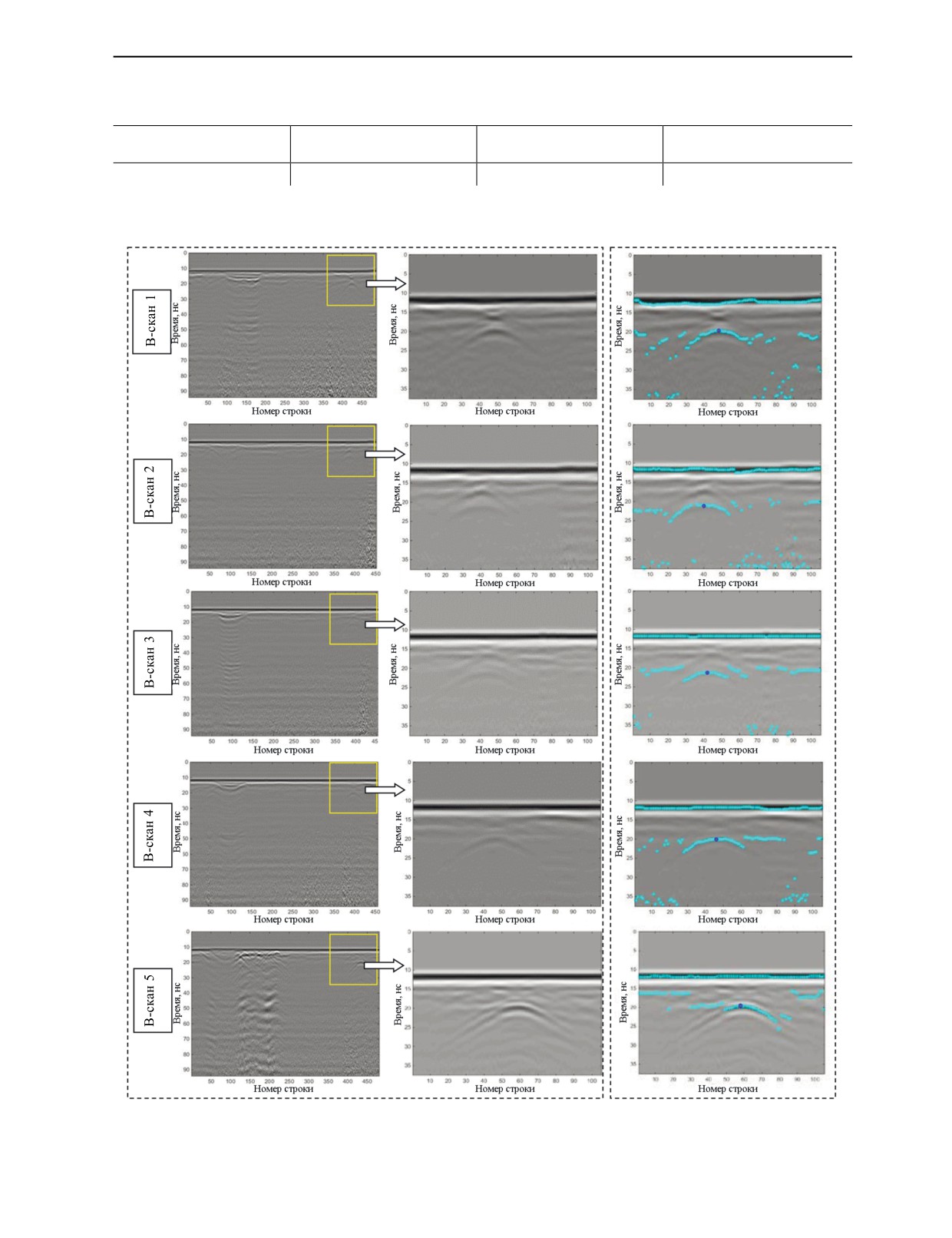
На рис. 7 показаны пики, обнаруженные на реальных РЛС-изображениях (5 B-сканов) с
использованием алгоритма обнаружения для модели 1. Для выбора наилучшего B-скана с целью
оценки диаметра была рассчитана глубина по строке, снятой, когда подповерхностная РЛС нахо-
дилась прямо над трубой. Таким образом, время прохождения было определено путем расчета
разницы между временами обнаруженных пиков, как описано в разделе 2.
Определение параметров измерения времени прохождения оценивается путем вычисления
относительной ошибки (как показано в табл. 5).
Таблица
5
Оценка относительной погрешности определения глубины
Расчетное время
Реальная глубина, м
Расчетная глубина, м
Относительная погрешность, %
прохождения, нс
B-скан 1
0,7
6,8
0,6
14,28
B-скан 2
0,7
9,74
0,86
22,86
B-скан 3
0,7
9,57
0,84
20
B-скан 4
0,7
8,28
0,73
4,28
B-скан 5
0,7
7,91
0,71
1,42
Результаты показывают, что B-скан 5 имеет минимальную относительную погрешность, рав-
ную 1,42 %. К выделенным точкам на B-скане 5 применяется процедура аппроксимации для оцен-
ки диаметра. В табл. 6 приведены различия между измеренными и фактическими значениями
диаметра трубы.
Дефектоскопия
№ 3
2022
Анализ данных зондирования георадаром для точной оценки диаметра подземных коммуникаций
31
Таблица
6
Результаты оценки диаметра
Глубина залегания, м
Теоретический диаметр, м
Фактический диаметр, м
Относительная погрешность, %
0,7
0,58
0,6
3,33
а
б
Рис. 7. Обнаружение пиков на реальных РЛС-изображениях: исходные РЛС-B-сканы (a), результаты обнаружения (б).
Дефектоскопия
№ 3
2022
32
Рим Гоззи, Самер Лахвар, Чокри Суани
4. ЗАКЛЮЧЕНИЕ
В статье были проанализированы данные сканирования подповерхностной радиолокационной
станции для улучшения неразрушающего контроля диаметра подземных коммуникаций в одно-
родной среде. Это исследование было основано на геометрической и математической модели с
использованием координат нескольких точек измерения (модель 1). Погрешность модели также
была проанализирована для описания различий между реальными выходными значениями и
выходными значениями модели.
В данной работе используются два фактора погрешности: глубина и относительная диэлектри-
ческая проницаемость. Данные георадарного сканирования собираются с помощью числового
симулятора gprMax с двух моделей. Первая модель включает четыре закопанных цилиндрических
объекта, наполненных водой и расположенных на разной глубине. Вторая модель содержит шесть
заглубленных цилиндрических объектов из разных материалов: воздуха, бетона и металла. Также
использовались экспериментальные данные и карта подземных коммуникаций в Тунисе. При чис-
ленном моделировании результаты показывают, что диаметр оценивается со средней абсолютной
погрешностью в процентах (МАПО) 0,5 и 0,32 % соответственно для двух протестированных
моделей. Кроме того, это исследование показало, что наибольшее влияние на результаты оказыва-
ет глубина. Поэтому для экспериментальных исследований оценивается также и глубина, чтобы
улучшить результат измерения диаметра.
В ходе дальнейших исследований будут проанализированы дополнительные параметры, вклю-
чая относительную диэлектрическую проницаемость близлежащей среды и толщину подземных
коммуникаций, для улучшения результата оценки диаметра.
Авторы заявляют об отсутствии конфликта интересов.
Авторы хотели бы выразить признательность двум национальным компаниям OTC и SONEDE
за предоставление радиолокационных данных и служебных карт, а также Mr. Graig Warren за его
помощь в использовании программного обеспечения с открытым исходным кодом gprMax.
СПИСОК ЛИТЕРАТУРЫ
1. Alhumimidi M.S. , Harbi H.M., Alfarhan M.S., Abdelrahman K., Aiken C.L.V. Imaging fracture
distributions of the Al-Khuff Formation outcrops using GPR and ERT geophysical techniques, Al-Qassim area,
Saudi Arabia // Arabian Journal of Geosciences. 2017. V. 10. No. 14. P. 1—11. DOI: 10.1007/s12517-017-
3059-0
2. Gomez-Ortiz D., Montesinos F.G., Martin-Crespo T., Solla M., Arnoso J., Velez E. Combination of
geophysical prospecting techniques into areas of high protection value: Identification of shallow volcanic
structures // Journal of Applied Geophysics. Oct. 2014. V. 109. P. 15—26. DOI: 10.1016/j.jappgeo.2014.07.009
3. Zhao W.K. et al. Advances in GPR data acquisition and analysis for archaeology // Geophysical Journal
International. Jul. 2015. V. 202. No. 1. P. 62—71. DOI: 10.1093/gji/ggv121
4. Odah H., Ismail A., Elhemaly I., Anderson N., Abbas A.M., Shaaban F. Archaeological exploration using
magnetic and GPR methods at the first court of Hatshepsut Temple in Luxor, Egypt // Arabian Journal of
Geosciences. 2013. V. 6. No. 3. P. 865—871. DOI: 10.1007/s12517-011-0380-x.
5. Hai-kuan W., Zhi-le S., Chang-wu L., Yi-chen M., Bao-xian L. Experimental Research on the Detection
of Inner Defects of Bellows Based on Ground Penetrating Radar // Russian Journal of Nondestructive Testing.
2020. V. 56. No. 6. P. 516—526. 2020. DOI: 10.1134/S1061830920060042
6. Benedetto A., Pajewski L. Civil Engineering Applications of Ground Penetrating Radar / Springer
Transactions in Civil and Environmental Engineering ed. Italy, 2015. P. 373.
7. Mahmoudi E., Hölter R., GeorgievaR., König M., Schanz T. On the global sensitivity analysis methods
in geotechnical engineering: A comparative study on a rock salt energy storage // International Journal of Civil
Engineering. 2019. V. 17. No. 1. P. 131—143. DOI: 10.1007/s40999-018-0302-3
8. Ghozzi R., Lahouar S., Souani C. An Innovative Technique for Estimating the Radius of Buried
Cylindrical Targets Using GPR / In Advances in Remote Sensing and Geo Informatics Applications: Springer.
2019. P. 151—154. DOI: 10.1007/978-3-030-01440-7_35
9. Zhang P., Guo X.X., Muhammat N., Wang X.D. Research on probing and predicting the diameter of an
underground pipeline by GPR during an operation period // Tunnelling and Underground Space Technology.
Sep. 2016. V. 58. P. 99—108. DOI: 10.1016/j.tust.2016.04.005
10. Alsharahi G., Driouach A., Faize A., Khamlichi A. Effect of electrical conductivity and dielectric
constant on the performance of ground penetrating radar // International Journal of Microwave and Optical
Technology. 2015. V. 10. No. 6. P. 458—463.
11. Giannopoulos A. Modelling ground penetrating radar by GprMax // Construction and Building
Materials. Dec. 2005. V. 19. No. 10. P. 755—762. DOI: 10.1016/j.conbuildmat.2005.06.007
Дефектоскопия
№ 3
2022
Анализ данных зондирования георадаром для точной оценки диаметра подземных коммуникаций
33
12. Warren C., Giannopoulos A., Giannakis I. gprMax: Open source software to simulate electromagnetic
wave propagation for Ground Penetrating Radar // Computer Physics Communications. Dec. 2016. V. 209.
P. 163—170. DOI: 10.1016/j.cpc.2016.08.020
13. Warren C., Giannopoulos A. gprMax User Guide Release 3.1. 1. 2017 / Avalable: www. gprmax. com.
14. Daniel C. One-at-a-time plans // Journal of the American statistical association. 1973. V. 68. No. 342.
P. 353—360. DOI: 10.1080/01621459.1973.10482433
15. Benitez D., Gaydecki P.A., Zaidi A., Fitzpatrick A.P. The use of the Hilbert transform in ECG signal
analysis // Computers in Biology and Medicine. Sep. 2001. V. 31. No. 5. P. 399—406. DOI: 10.1016/s0010-
4825(01)00009-9
16. Ghozzi R., Lahouar S., Souani C. The estimation of buried empty cylindrical tubes characteristics using
GPR / In 2018 4th International Conference on Advanced Technologies for Signal and Image Processing
(ATSIP), 2018: IEEE. P. 1—6. DOI: 10.1109/ATSIP.2018.8364486
17. Weisburd D., Britt C. Measuring Association for Interval-Level Data: Pearson’s Correlation Coefficient
// Statistics in Criminal Justice. 2007. P. 381—420. DOI: 10.1007/978-1-4614-9170-5_14
18. Tzanis A. matGPR Release 2: A freeware MATLAB® package for the analysis & interpretation of
common and single offset GPR data. Ed.: FastTimes, 2010. V. 15. P. 17—43.
Дефектоскопия
№ 3
2022