УДК 620.179.16
МОДЕЛИРОВАНИЕ РАБОТЫ БЕСКОНТАКТНОГО УЛЬТРАЗВУКОВОГО
ПРЕОБРАЗОВАТЕЛЯ В СИСТЕМАХ АКТИВНОГО ВОЛНОВОГО
МОНИТОРИНГА ТОНКОСТЕННЫХ КОНСТРУКЦИЙ
© 2022 г. Е.В. Глушков1,*, Н.В. Глушкова1,**, О.А. Ермоленко1,***
1Институт математики, механики и информатики, Кубанский государственный университет,
Россия 350040 Краснодар, ул. Ставропольская, 149
E-mail: *evg@math.kubsu.ru; **nvg@math.kubsu.ru; ***o.ermolenko.a@gmail.com
Поступила в редакцию 14.05.2022; после доработки 24.06.2022
Принята к публикации 01.07.2022
При контроле состояния тонкостенных конструкций ультразвуковыми бегущими волнами наряду с традиционным
способом их возбуждения и регистрации сетью пленочных пьезоэлементов все более активно используются бесконтакт-
ные (воздушно-связные) преобразователи. Разработка и успешное применение таких диагностических систем базиру-
ется на математическом и компьютерном моделировании протекающих здесь волновых процессов. В настоящей работе
приводится описание моделей, созданных на основе использования интегральных и асимптотических представлений
возбуждаемых волн через фурье-символы матрицы Грина рассматриваемой связной системы источник — акустическая
среда — упругий волновод. По сравнению с традиционным конечно-элементным моделированием они обладают такими
преимуществами как малозатратность параметрического анализа, наглядность волновой структуры решения и возмож-
ность решения задач селективного возбуждения и максимизации амплитуды требуемых мод выбором оптимального
наклона источника и центральной частоты. Приводятся численные примеры верификации разработанных моделей и
определения оптимальных параметров работы источника.
Ключевые слова: бесконтактный ультразвуковой преобразователь, упругий волновод, интегральные и асимптотиче-
ские представления, бегущие волны, оптимальный угол наклона.
DOI: 10.31857/S0130308222080024, EDN: BQBCUZ
ВВЕДЕНИЕ
Примеры использования бесконтактных ультразвуковых (УЗ) преобразователей для возбужде-
ния и приема бегущих волн Рэлея и Лэмба известны с 1950-х годов. Так, например, в классической
монографии И.А. Викторова [1] дается описание способа возбуждения бегущих волн через слой
жидкости, который назван иммерсионным методом клина, и приводятся примеры его практиче-
ской реализации для обнаружения зон отслоения в топливных элементах атомных реакторов [2] и
для неразрушающего контроля листов металла [3]. В контактном варианте пьезоэлемент, прикре-
пленный к верхней грани пластикового клина с определенным углом раствора θ, излучает плоскую
волну, распространяющуюся с обусловленной его упругими свойствами скоростью c0. При выпол-
нении условия sin θ = c0/cn эта волна возбуждает в образце бегущую волну рэлеевского типа, рас-
пространяющуюся вдоль его поверхности со скоростью cn. В бесконтактном (иммерсионном)
варианте пьезоисточник помещается в слой жидкости, что дает возможность легко варьировать
угол его наклона для возбуждения различных бегущих волн, а также для учета зависимости ско-
рости cn от частоты, обусловленной дисперсионными свойствами образца.
Однако погружение зондируемого образца в жидкую среду не всегда возможно, особенно
при необходимости контроля больших площадей протяженных конструкций, а работа бескон-
тактного УЗ преобразователя через воздушную среду ограничивается сильным рассогласовани-
ем акустических импедансов, приводящим к почти полному отражению падающей волны от
поверхности образца. Поэтому бесконтактные методы УЗ контроля не находили широкого при-
менения до появления в 1980—90-х годах нового поколения пьезокерамических преобразовате-
лей с воздушной связью (air-coupled transducers — ACT) [4, 5], показавших возможность воз-
буждения бегущих волн [6, 7]. В настоящее время наряду с пьезокерамическими ACT, дающими
узкополосный зондирующий сигнал с определенной центральной частотой, разрабатываются
бесконтактные УЗ излучатели, работающие на других принципах, например, импульсные широ-
кополосные магнитострикционные преобразователи [8], которые применяются в комплекте с
лазерными виброметрами, используемыми для сканирования возбуждаемых в образце поверх-
ностных волн [9].
Бесконтактные ACT применяются для обнаружения скрытых дефектов [10] и контроля состо-
яния материалов (см., например, обзоры [11, 12]), в том числе для определения эффективных
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
13
упругих модулей Cij анизотропных материалов сложной структуры, таких как полимерные компо-
зиционные материалы и армированные углепластики [13], древесина [14—16], минерально-поли-
мерная бумага [17], железобетон [18], или даже для контроля спелости авокадо [19]. Один из
перспективных методов использования ACT для получения характеристик материала основан на
построении так называемых полярных скан-образов (polar scans), которые получаются при варьи-
ровании наклона источника [20, 21]. На критических углах наклона θ, когда проекция длины волны
зондирующего квазигармонического сигнала совпадает с длиной возбуждаемых в образце объем-
ных или поверхностных волн, наблюдается резонансный рост коэффициента прохождения. Для
изотропных материалов он проявляется в полярных сканах в виде концентрических окружностей,
а для анизотропных композитов дает более сложный рисунок. Считается, что эти узоры уникальны
для каждого образца, представляя собой «акустические отпечатки пальцев механических свойств»
[22].
Традиционно ACT используются для обнаружения дефектов и повреждений в поле отражен-
ных или прошедших акустических волн (зондирование в эхорежиме или в режиме сквозного
просвечивания [23]). При этом перемещение бесконтактных источников и приемников УЗ сигна-
лов вдоль поверхности с помощью роботов-манипуляторов позволяет автоматизировать кон-
троль больших площадей инспектируемых изделий [24, 25]. Наряду со сканированием с помо-
щью зондирующих объемных упругих волн для протяженных тонкостенных конструкций
используются бегущие волны, которые распространяются на сравнительно большие расстояния,
взаимодействуя с неоднородностями (дефектами) любой природы и выявляя их наличие возни-
кающими при дифракции отраженными и рассеянными бегущими волнами. Волновой монито-
ринг с помощью бегущих волн, получивший название SHM-технологии (от Structural Health
Monitoring — SHM [26, 27]), не предполагает перемещения источника вдоль поверхности.
Обычно для их возбуждения и регистрации используется сравнительно редкая сеть пленочных
пьезоэлементов, прикрепленных к поверхности или вмонтированных внутрь контролируемого
образца. Однако для этой цели могут быть использованы и современные ACT [28].
Для создания эффективных систем УЗ контроля и корректной интерпретации результатов из-
мерений используются математические модели, описывающие процессы возбуждения, распро-
странения и дифракции бегущих волн в рассматриваемой слоистой структуре. Взаимодействие
акустических волн с упругими телами является классической задачей структурной акустики.
Развитые здесь методы и подходы [29—31] позволяют исследовать закономерности прохождения
и отражения акустических сигналов через твердую преграду и дисперсионные характеристики
возбуждаемых в ней бегущих упругих волн. Для более точного количественного моделирова-
ния волновых процессов с учетом связного волнового взаимодействия пьезопреобразователей
с зондируемой структурой в настоящее время, как правило, используются пакеты прикладных
программ, реализующие прямые численные методы, базирующиеся на сеточной аппроксима-
ции решения, например, метод конечных элементов (МКЭ) [32]. Однако сеточная аппроксимация
волновых процессов численно затратна и без постпроцессорной обработки не дает физически
наглядной картины возбуждения волн различного типа и распределения энергии источника меж-
ду ними, поэтому здесь также используются полуаналитические и гибридные численно-анали-
тические подходы [33, 34].
В предыдущей работе [35], посвященной моделированию пленочных преобразователей как
элементов SHM-систем, дается описание полуаналитических моделей, разработанных на основе
использования явных интегральных и асимптотических представлений возбуждаемых волн че-
рез фурье-символы матрицы Грина рассматриваемой волноводной структуры. Настоящую работу
можно рассматривать как ее продолжение и обобщение на случай бесконтактных преобразовате-
лей. Моделирование возбуждаемых объемных акустических и бегущих упругих волн здесь также
базируется на построенных ранее явных представлениях функции Грина для связной системы ис-
точник — акустическая среда — упругий волновод [36, 37].
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Рассматривается упругая (в общем случае многослойная анизотропная) пластина толщи-
ны H, погруженная в акустическую среду (воздух, вода). С ней взаимодействует волновое поле
акустического давления p0, генерируемое бесконтактным УЗ преобразователем, находящимся
на расстоянии d от поверхности пластины (рис. 1). В результате в пластине возбуждается поле
смещений u, а в верхнем и нижнем акустических полупространствах z ≥ 0 и z ≤ -H — поле от-
p+ . Нестационарные колебания p(x, t) и u(x, t) описываются
Дефектоскопия
№ 8
2022
14
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
а
б
z
z
z1
θ
y
D
p0
x1
θ
y
a
x
y
H
d c0, ρ0
x
H
cp, cs, ρ
0
c0, ρ0
Рис. 1. Зондирование бесконтактным преобразователем (ACT) (а); геометрия задачи (б).
их частотными спектрами, поэтому задача сводится к определению комплексных амплитуд уста-
ωt
ωt
новившихся гармонических колебаний
p(x,ω
) i
и
u x,ω
) i
;
ω= π
— круговая частота,
f — частота; гармонический множитель
− ω далее опущен.
Поле источника моделируется линейной суперпозицией полей
g
(x,ξ), возбуждаемых точеч-
0
ными источниками (монополями) с центрами в точках ξ = (ξ,η ,ζ ) , которые распределены по по-
верхности D излучающего элемента с некоторой плотностью, задаваемой функцией
q
(ξ) :
0
p
(x)
=∫∫g
(x,ξ)q
(ξ)d
ξ
0
0
(1)
D
Для учета частотной характеристики источника p0 необходимо домножить на функцию S(ω), за-
дающую частотный спектр рассматриваемого преобразователя:
p
:= p
S(ω) . У ACT преобразова-
0
0
телей излучающая пластина (область D), как правило, круговой формы. Она может располагаться
как параллельно поверхности образца, так и наклонно под некоторым углом θ (рис. 1б). Отметим,
что в рамках описываемой модели поверхность D может быть неплоской. Например, поле акусти-
ческого микроскопа [38, 39] моделируется интегралом (1) по вогнутой поверхности излучающего
элемента.
При проведении расчетов в качестве g0 берется частное решение уравнения Гельмгольца с
дельта-функцией в правой части (функция Грина для безграничной среды):
1
iκ
R
g
(x,ξ)
=-
e
0
,
R
=|
x
−
ξ|,
(2)
0
4πR
а остальные сомножители монополя (iρ0ωV0 [40]) перенесены в q0. Здесь
κ
=ω
c
— волновое
0
0
число; c0 — скорость звука; ρ0 — плотность акустической среды; V0 — объемная скорость моно-
поля. Величину q0 можно назвать объемным напряжением, ее размерность — сила, отнесенная к
объему, в н/м3; размерность g0 — 1/м.
g± , описывающие поле от-
−
+
раженных и прошедших волн:
g = g
+
g
при z ≥ 0 и
g = g
при z ≤ -H, а в самой пластине поле
0
sc
sc
смещений u описывается аналогично представлению (1) с помощью решения
g x,ξ)
связной за-
u
дачи: точечный источник — акустическая среда — упругая пластина:
p(x)
=∫∫g(x,ξ)q
(ξ)d
ξ
≈∑A
g(x,ξ
),
z≥
0,
z≤-H,
0
j
j
(3)
D
j
u x)
=
g x,ξ)q
(ξ)
d
ξ
≈∑A
g x,ξ
),
−H ≤z≤
0.
∫∫
u
0
j
u
j
(4)
D
j
Коэффициенты Aj выражаются через весовые коэффициенты кубатурной формулы и значения q0
2
в узлах
ξ
сетки, покрывающей область D; для квадратной сетки с шагом h —
A
=q
(ξ
)h
. В
j
j
0
j
численных примерах область D берется круговой радиуса a, а распределение
q
(ξ) равномерным
0
Дефектоскопия
№ 8
2022
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
15
(q0 = const). Сопоставление с экспериментальными и МКЭ-результатами других авторов показывает,
что такая модель источника обеспечивает адекватное описание реальных волновых процессов (см.,
например, сопоставления с [23], приведенные в [36, 37]). Амплитуда смещений u пропорциональна
2
суммарной нагрузке
F = πa
q
0
(размерность — н/м); для удобства на графиках ниже они приводятся
2
нормированными к максимальным значениям или к амплитуде смещений
v
= F∇g
(ρ
ω
), генери-
0
0
0
руемых эквивалентным точечным источником у поверхности пластины (R = d). Следует также пом-
нить, что диапазон частотного спектра S(ω) реальных ACT ограничен; как правило, он сосредоточен
в окрестности определенной центральной частоты fc. Приведенные ниже численные результаты по-
лучены для S = 1, т.е. для широкополосного импульсного источника.
2
В акустической среде
0
u = ∇p (ρ
ω
) [40], соответственно вектор-функция Грина для переме-
2
щений доопределяется в ней соотношением
g
=∇g
(ρ
ω
). Для погруженных волноводов с пло-
u
0
ско-параллельными границами (многослойные пластины) применение преобразования Фурье Fxy
по горизонтальным координатам x и y позволяет выразить функции Грина g и gu через их фурье-
символы G = Fxy[g] и G = Fxy[gu]:
1
−i(α
x+α
y)
1
2
g(x,ξ)
=
F
[G] =
G α z;ξ)e
dα
dα
,
α
=
(α
,α
)
xy
∫∫
1
2
1
2
(5)
2π
Γ
1
Γ
2
и аналогично для gu. Контуры Γ1, Γ2 идут вдоль вещественных осей комплексных плоскостей α1 и
α2, отклоняясь от них при обходе вещественных полюсов в соответствии с принципом предельного
поглощения. Функции G и Gu выражены через элементы матрицы Грина K для упруго-акустиче-
ского полупространства z ≤ 0, на которое действует наведенная падающим полем поверхностная
нагрузка q [36]:
−
−i(α
1
ξ+α
2
η)
G α z;ξ)
=[G
+G
]e
,
z
≥
0;
(6)
0
sc
−σ
0
|
z−ζ|
−
2
−σ
0
|z+ζ|
G
=-e
(2σ
),
G
=-(
ρ
ω
K
+σ
∆)e
(2
σ
∆
);
0
0
sc
0
33
0
0
0
2
2
2
∆
0
=σ
0
∆-ρ
0
ω K
33
,
σ
0
= α
−κ
0
;
2
2
2
2
Reσ
≥ 0, Imσ
≤ 0, α
=| α |
=α
+α
,
α=(α
,α
),
0
0
1
2
1
2
K (α,z) и Δ(α) — числитель и знаменатель элемента
K
(α,z) матрицы K:
K
=K
∆ , в фор-
33
33
33
33
K входит при z = 0. В нижнем полупространстве z ≤ 0 фурье-символ функции Грина
мулы (6)
33
смещений выражается через элементы третьего столбца матрицы K:
e-
i
(α
1
ξ+α
2
η)
G
u
(α,z;ξ)
=
K
3
,
z ≤ 0;
(7)
0
z
K
=K
,
∆ K
=
(
K
,
K
,
K
)T ,
Q
=-e-σ
∆
3
3
3
13
23
33
0
Важно, что эти представления справедливы для произвольного вертикально-неоднородного
упруго-акустического полупространства z ≤ 0, контактирующего с верхним акустическим полу-
пространством z ≥ 0, в котором расположен источник. В частности, упругий слой может быть не
только изотропным и однородным, как при моделировании УЗ зондирования металлических об-
разцов (алюминиевых, стальных и т.п.), но и многослойным анизотропным (слоистые компози-
ты). Для проведения расчетов использовались алгоритмы вычисления элементов матрицы K, ко-
торые к настоящему времени хорошо разработаны и реализованы в виде компьютерных программ
(см. обзор в работе [41]). Численное интегрирование на основе представлений (3)—(5) позволяет
получать такие же количественные данные об амплитудно-частотных характеристиках волнового
поля, возбуждаемого бесконтактным преобразователем, как и при использовании прямых числен-
ных методов, базирующихся на сеточной аппроксимации.
Дефектоскопия
№ 8
2022
16
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
ГОРИЗОНТАЛЬНЫЙ И НАКЛОННЫЙ ИСТОЧНИКИ
i(α
1
ξ+α
2
η
Параметры ξ и η входят в функции Грина G и Gu только через экспоненту
e-
),
поэтому
в случае горизонтального источника с плоским излучающим элементом (z = const > 0) интегри-
рование по области D в представлении (3) — (4) сводится к преобразованию Фурье от заданного
распределения q0 (ξ, η):
i(α
1
ξ+α
2
η)
q
(ξ,η)e
dξdη= F
[q
] = Q
(α).
(8)
∫∫
0
xy
0
0
D
В случае изотропной пластины двукратные интегралы по α1, α2 сводятся к однократным по α, что
существенно облегчает численное интегрирование.
Для наклонного кругового источника интегрирование по D также можно свести к функции
Q0, но от более сложного аргумента и с дополнительным интегрированием по угловой координа-
те. Однако такие представления оказались слишком громоздкими, более удобно и менее затратно
использование суперпозиции конечного числа монополей в соответствии с формулами (3) и (4).
Вычислительные затраты снижаются за счет того, что представление функций Грина g и gu сводит-
ся к однократным интегралам, а в дальней зоне используется их асимптотика, дающая объемные
акустические и бегущие упругие волны.
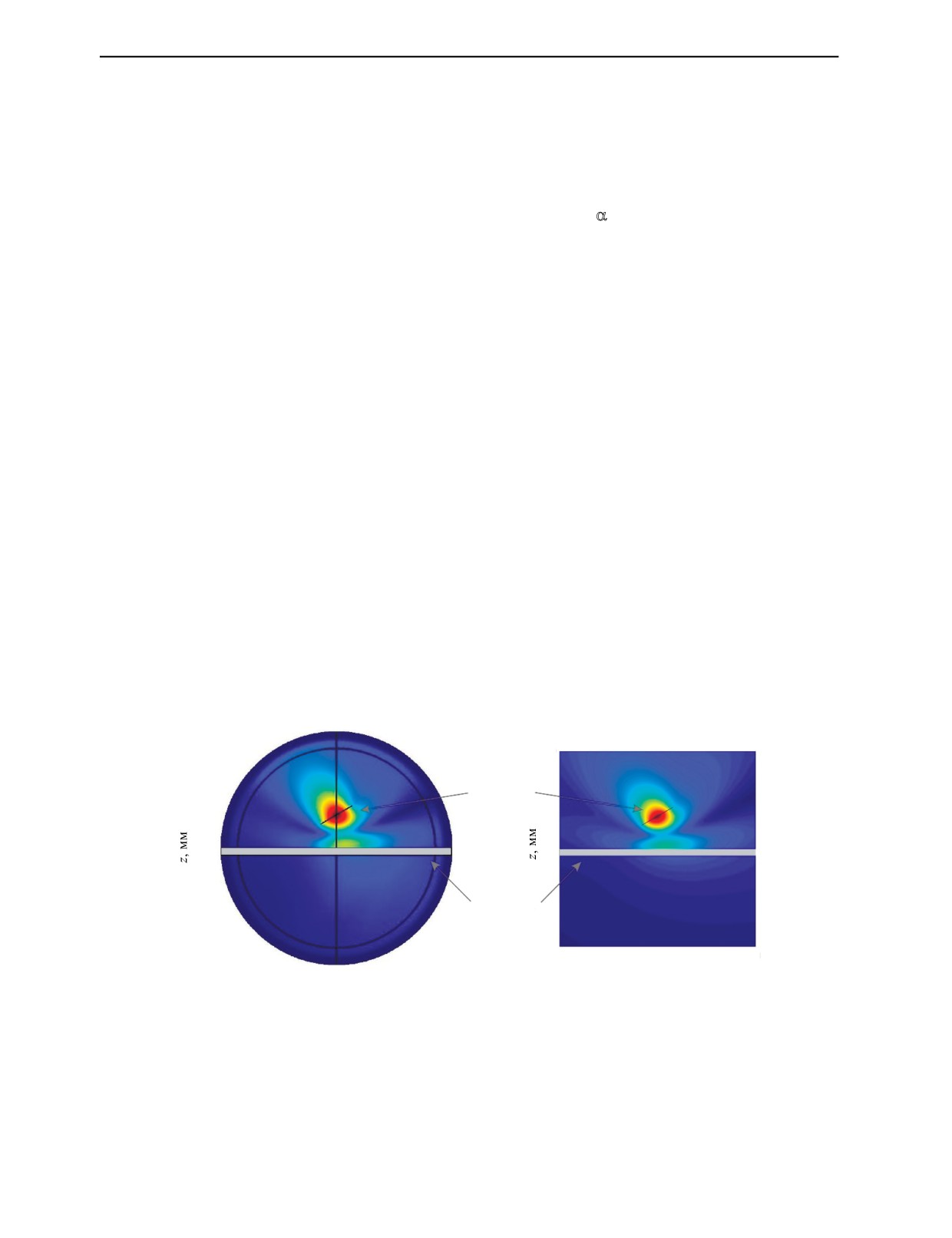
Для верификации такого подхода к моделированию работы наклонного источника проводилось
сопоставление с 3D МКЭ-результатами, полученными с помощью пакета Comsol Multiphysics 5.6
на рис. 2 показано сечение в плоскости y = 0 пространственного распределения амплитуды поля
давления |p(x, 0, z)|, рассчитанного с помощью 3D МКЭ (слева) и суперпозиции точечных источни-
ков (справа).
Здесь и на рис. 3 рассматривается погруженная в воду алюминиевая пластина толщиной
H = 2 мм; источник радиуса a = 5,5 мм (как у использовавшихся для измерений преобразователей
PNL F19-012 R (Starmans NDT, Чехия) и CF200 (Sonotec, Германия)) расположен на расстоянии
d = 10 мм от пластины, угол наклона θ = 15°, частота f = 100 кГц. Скорость звука в воде с0 =
=1485 м/с, плотность ρ0 = 1000 кг/м3; скорость продольных и поперечных объемных волн в
алюминии: cp = 6175 м/с и cs = 3103 м/с, плотность ρ = 2700 кг/м3.
а
б
35
30
Источник
–35
35
0
Пластина
-30
0
30
–35
x, мм
x, мм
Рис. 2. Верификация представления (3): поле давления |p|, рассчитанное с помощью МКЭ (а) и как сумма точечных
источников (б).
Поскольку МКЭ применим только в ограниченной области, бесконечная среда и волновод ис-
кусственно ограничиваются поглощающим слоем (perfect match layer — PML) [42], внутренняя
граница которого показана на рис. 2 окружностью радиуса 30 мм. Хотя искусственное ограничение
Дефектоскопия
№ 8
2022
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
17
а
б
МКЭ
N = 276
N = 29
1
1
θ = 0
θ = π/6
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0
0
–20
-10
0
10
20
-20
-10
0
10
20
x, мм
x, мм
в
г
1
1
θ = π/4
θ = π/3
0,8
0,8
0,6
0,6
0,4
0,4
0,2
0,2
0
0
-20
-10
0
10
20
-20
-10
0
10
20
x, мм
x, мм
Рис. 3. Верификация представления (4): вертикальные перемещения |uz| / max|uz| на поверхности пластины z = 0 в зави-
симости от x; f = 100 кГц; угол наклона источника θ = 0 (а), θ = π/6 (б), θ = π/4 (в), θ = π/3 (г).
объема немного искажает условия формирования поля установившихся колебаний (а иногда, на-
пример, в случае возбуждения в пластине обратных волн использование PML приводит к суще-
ственно неверным результатам [34]), в данном случае обе модели дают хорошо согласующиеся
картины распределения амплитуды волнового поля. Но для получения МКЭ-результата потре-
бовалось более четырех часов против двух минут при использовании суперпозиции (3) с числом
источников Ns = 441.
Для верификации представления (4) на рис. 3 приводятся нормированные к максимуму графи-
ки амплитуды вертикальных смещений |uz| на ее поверхности z = 0 в зависимости от x при углах
наклона кругового источника θ = 0, 30, 45 и 60°; сравниваются результаты, полученные с помощью
МКЭ и суперпозицией точечных источников при Ns =29 и 276. Последние демонстрируют быструю
сходимость с увеличением Ns и хорошо согласуются с МКЭ-результатами в предсказании положе-
ния точки максимума, которая с увеличением θ смещается вправо. На рис. 4 показано аналогичное
сопоставление смещений в зависимости от частоты f. С увеличением угла наклона здесь появля-
ются дополнительные локальные максимумы, указывающие на существование оптимальных для
возбуждения бегущих волн сочетаний частоты и угла наклона источника.
а
б
в
МКЭ
интеграл
1
1
1
θ = π/6
θ = π/4
θ = π/3
0,5
0,5
0,5
0
0
0
50
100
50
100
50
100
f, кГц
f, кГц
f, кГц
Рис. 4. Верификация представления (4): |uz| / max|uz| в зависимости от частоты f; x = 20 мм, z = 0, угол наклона источни-
ка θ = π/6 (а), θ = π/4 (б), θ = π/3 (в).
Дефектоскопия
№ 8
2022
18
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
БЕГУЩИЕ ВОЛНЫ
Точечный источник, как и горизонтальный круговой, возбуждает в изотропной пластине осе-
симметричное волновое поле u, радиальная и вертикальная компоненты которого ur и uz зависят
2
2
только от
r= x
+y
и z и не зависят от угловой координаты φ. Осесимметричными являются и
входящие в представление (4) волновые поля
g x,ξ
)
, каждое в своей системе цилиндрических
u
j
координат с центром в (ξ
j
,η
j
):
x-ξ
j
=r
j
cosϕ
j
,
y-η
j
=r
j
sinϕ
j
,
2
2
r
=
(x-ξ
)
+(y-η
)
,
z=z
j
j
j
j
Радиальная и вертикальная компоненты вектора
g
=
(g
, g
)
представимы в виде однократных
u
r
z
контурных интегралов, которые выражаются через сумму вычетов в полюсах подынтегральных
функций ζn, попадающих внутрь замкнутого контура. В дальней зоне
κ
r
1
[36]:
0
j
−σ
dn j
(1)
g
~
P z)
e
H
(ζ
r
),
r
∑
n
1
n j
(9)
n
−σ
n j
d
(1)
g
z
~
∑
n
R z)e
H
0
(ζ
n j
r
).
n
Здесь ζn — вещественные и близкие к вещественной оси корни характеристического (дисперсион-
ного) уравнения
∆ α
ω
)
=
0
⇒ α=ζ
(ω),
(10)
0
n
P
= -iP(ζ z)
(2∆′
(ζ
)),
R
= iR(ζ z)ζ
(2∆′
(ζ
)),
P и
R— числители функций P(α, z) и
n
n
0
n
n
n
n
0
n
R(α, z), входящих в традиционное [43] представление
K
=
(
−iα
P,
−α
P,
R
)T
для изотропного по-
3
1
2
2
2
лупространства;
σ
=σ
(
ζ
)
= ζ
−κ
, dj — расстояние от центра монополя
ξ
до поверхности
n
0
n
n
0
j
(1)
z = 0,
H
— функции Ханкеля.
m
В дальней зоне
ζ
n
r
1 можно воспользоваться асимптотикой функций Ханкеля:
(1)
2
H
(ζ
r
)~
exp[i(ζ
r -m
π
2)]
ζ
r
m n j
n j
n j
πi
и разложениями:
ζ
r =ζ
[r- ξ cos
ϕ+η
sin
ϕ)]
+O(1 (
ζ
r)),
n j
n
j
j
n
2
1(ζ
r)
=1 (
ζ
r
)
+O
(1 (
ζ
r)
).
n
n
n
Их подстановка в представление (4) дает асимптотику поля u в виде цилиндрических бегущих
волн, в которых полюса ζn играют роль волновых чисел. Вертикальная компонента смещений:
iζ
n
r
u
~
a z,ϕ)
e
ζ
r +O
(1 (ζ
r
)),
ζ
r
1,
(11)
z
∑
n
n
n
n
n
−
i
ζ
[
n j
ξ
cos
ϕ+η
j
sinϕ]
−σ
dn j
a
n
=
n
R z)Q
n
(ϕ),
Q
n
=
2 (πi
)
∑
A
j
e
e
,
j
радиальная компонента ur имеет аналогичное представление через Pn(z).
Данные асимптотические представления дают такую же количественную информацию о сум-
марной амплитуде волнового поля u, как и исходное разложение (4), но с гораздо меньшими вы-
числительными затратами. Каждое слагаемое суммы (11) описывает отдельную моду бегущих
волн, причем зависимость от пространственных переменных r, φ и z в них полностью разделена.
Дефектоскопия
№ 8
2022
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
19
Дисперсионные характеристики и затухание цилиндрической волны с расстоянием определяются
i
ζ r
e
ζ
r
, в то время как Rn(z) дает зависимость от глубины,
n
т.е. собственную форму n-той моды. Два этих фактора определяются только волноводными свой-
ствами среды и не зависят от характеристик источника. Размер, форма и наклон источника, как и
задающий амплитуду акустического сигнала коэффициент q0, входят в сомножитель Qn(φ), опреде-
ляющий амплитуду и диаграмму направленности каждой из возбуждаемых бегущих волн.
В анизотропном случае асимптотика бегущих волн имеет аналогичный вид [41], но из-за зави-
симости полюсов ζn от угловой координаты волновые числа в показателях экспонент уже зависят
от φ, задавая квазицилиндрические волн с некруговым фронтом. Скорость их распространения за-
висит от направления, а вектор групповой скорости отклоняется от волнового вектора.
Полученные интегральные и асимптотические представления являются удобным инстру-
ментом для анализа энергетического баланса в системе источник — акустическая среда — по-
груженный волновод. Осредненный за период колебаний поток энергии, переносимой каждой
модой через поперечное сечение волновода, выражается через амплитудные коэффициенты раз-
ложения an = (ax, ay, az), в то время как общая мощность источника вычисляется интегрированием
плотности потока энергии по окружающей его замкнутой поверхности (для рассматриваемой
модели — по верхней и нижней стороне излучающей пластины [36]). Такой анализ позволяет, в
частности, проследить распределение волновой энергии, поступающей от источника в пластину
через акустическую среду, между возбуждаемыми в ней бегущими волнами, в том числе и про-
явление эффекта эстафетной передачи энергии [44, 45].
2
При исчезающе малой плотности акустической среды
(ρ
ω
→ 0) уравнение (10) вырождается
0
в дисперсионное уравнение ∆(α,ω) = 0 для ненагруженной пластины. Его вещественные корни яв-
ляются волновыми числами незатухающих бегущих волн (для однородного волновода — волн Лэм-
ба [1]). При относительно малой плотности
0
ρ
ρ
1
эти корни смещаются с вещественной оси в
комплексную плоскость α, давая вытекающие бегущие волны [46—48], которые распространяются
вдоль поверхности волновода с фазовой скоростью
c
n
=ω
Reζ
n
и дополнительным экспоненци-
− ζ
альным затуханием
(декремент затухания
δ
=
2π ζ Reζ
1). Кроме того, появляются
n
n
n
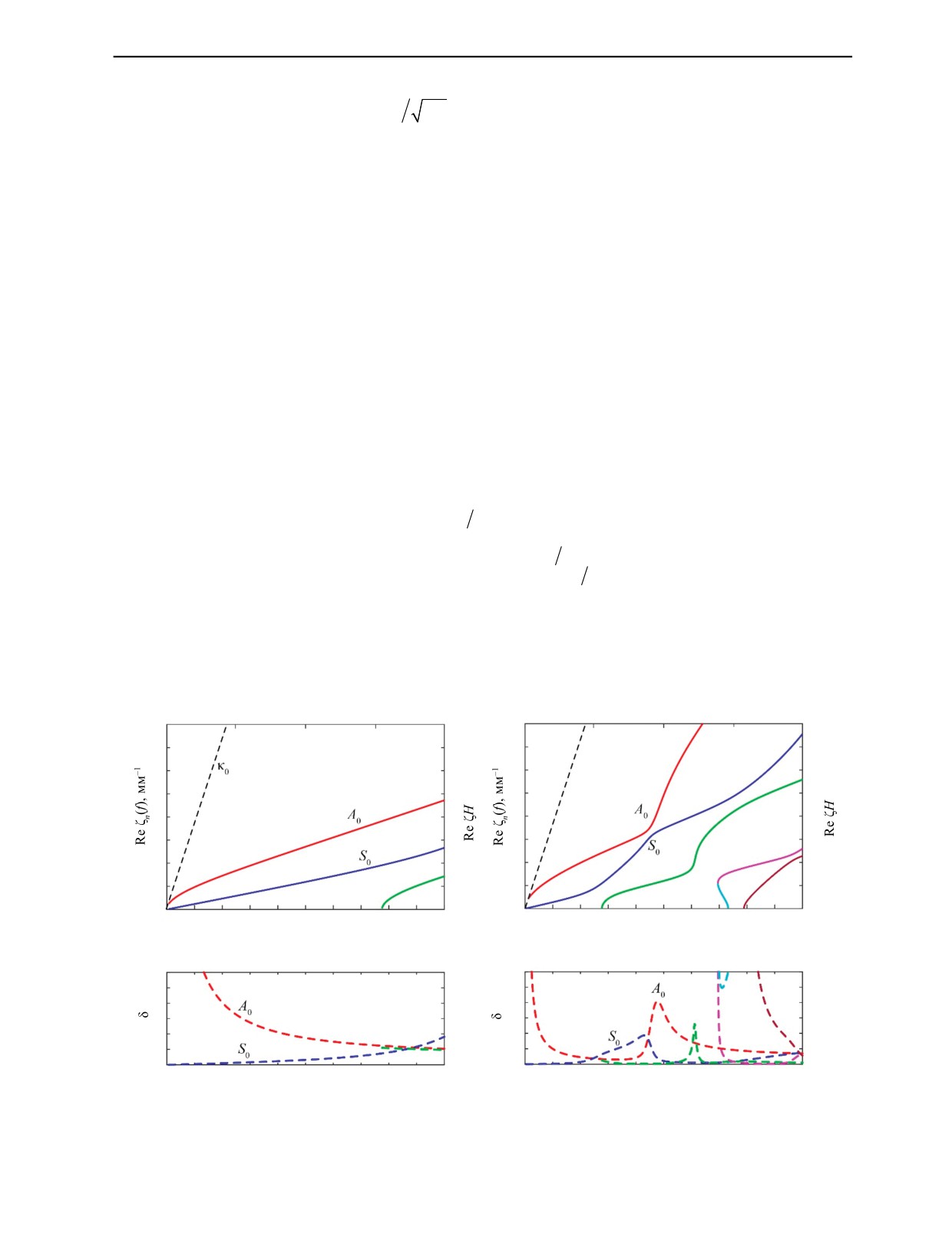
две незатухающие (δn = 0) бегущие волны Шолте—Стоунли [49]. Дисперсионные (частотные) зави-
симости ζn(ω) для волн Лэмба хорошо известны [1], а для волновода, погруженного в акустическую
среду с относительно малой плотностью, картина дисперсионных кривых практически не меня-
ется (рис. 5а). Для иллюстрации влияния слоистости справа на рис. 5б приведены дисперсион-
а
б
0
1
2
3
ω
0
1
2
3
ω
4
8
4
8
3
6
3
6
2
4
2
4
1
2
2
1
0
0
0
200
400
600
800
1000
0
200
400
600
800
1000
f, кГц
f, кГц
в
г
×10-4
×10-3
3
3
2
2
1
1
0
200
400
600
800
1000
0
200
400
600
800
1000
f, кГц
f, кГц
Рис. 5. Дисперсионные кривые Re ζn(f) для алюминиевой пластины (а) и двуслойного волновода плексиглас/алюми-
ний (б) в воздухе; снизу декременты затухания соответствующих бегущих волн δn(f) (в), (г).
Дефектоскопия
№ 8
2022
20
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
ные кривые для двуслойного образца плексиглас/алюминий той же суммарной толщины H = 2 мм
(h1 = h2 = 1 мм, параметры плексигласа cp = 2813 м/с, cs = 974 м/с, ρ = 1190 кг/м3). Наряду с раз-
мерными значениями частоты и волновых чисел на верхней и правой осях отложены безразмерная
круговая частота ω = 2πfH/cs и безразмерные волновые числа ζnH (cs — скорость поперечных волн
в однородном слое). Штриховой луч на рис. 5 показывает частотную зависимость волнового числа
звуковых волн κ0 = ω/c0; дисперсионные кривые волн Шолте—Стоунли идут вдоль этого луча.
Следует отметить, что волновые числа ζn входят и в амплитудные коэффициенты Qn, которые
тем самым зависят не только от параметров источника, но и от дисперсионных характеристик воз-
буждаемых бегущих волн. Очевидно, что выбор параметров источника, приводящих к увеличению
абсолютной величины Qn, дает также увеличение амплитуды соответствующей бегущей волны.
ВЫБОР ПАРАМЕТРОВ ВОЗБУЖДЕНИЯ БЕГУЩИХ ВОЛН
В рамках представления (11) задача выбора оптимальных режимов возбуждения бегущих волн
сводится к максимизации амплитудных коэффициентов an, в которые параметры источника входят
только через сомножители Qn. На рис. 6 показана зависимость абсолютной величины такого сомно-
жителя от частоты и угла наклона для фундаментальной моды A0, возбуждаемой воздушно-связ-
ным преобразователем в алюминиевой пластине, и соответствующей моды в двуслойном образце
плексиглас/алюминий (первая дисперсионная кривая на рис. 5а и 5б соответственно). Аналогич-
ные поверхности Qn(φ, θ) строятся и для волновых чисел ζn остальных мод, но их практическая
ценность меньше, так как амплитуда второй фундаментальной моды S0, возбуждаемой ACT, на 2-3
порядка меньше, чем моды A0, а высшие изгибные моды появляются только на нерабочих для рас-
сматриваемых ACT частотах выше 200 кГц.
а
б
0,5
0,5
80
0,4
0,4
0,3
0,3
40
0,2
0,2
0,1
0,1
0
0
200
400
600
800
1000
0
200
400
600
800
1000
f, кГц
f, кГц
Рис. 6. Поверхности функции Qn (f, θ) фундаментальной моды A0 для однородного (а) и двуслойного (б) волноводов; сплош-
ная линия значение критического угла для возбуждения моды A0, горизонтальная штриховая линия — для рэлеевской
волны.
Видно, что амплитуда Qn достигает максимальных значений на частотах f, близких к нулю,
причем для всего диапазона изменения угла наклона θ. Но с увеличением частоты зона максиму-
мов быстро стягивается в узкий коридор, идущий на рис. 6а с постепенным снижением к значению
θ = θR, где θR = arcsin(c0/cR) — угол возбуждения волны Рэлея, распространяющейся вдоль поверх-
ности z = 0 со скоростью cR (для алюминия cR = 2957 м/с, θR = 0,042π или 7,4°). Значения крити-
ческих углов, при которых плоская звуковая волна возбуждает в образце одну из бегущих волн,
определяется из условия совпадения ее фазовой скорости cn = ω/ζn со скоростью движения точки
пересечения плоского фронта с границей раздела сред: c0 sinθ = cn.
В отличие от бездисперсионной волны Рэлея критические углы возбуждения нормальных мод
частотно зависимы. Сплошными линиями на рис. 6а и 6б показаны примеры такой зависимости
для критического угла θA для моды A0 в однородной пластине и соответствующей моды в двуслой-
ном образце. На рис. 6 эти линии идут по центру зон максимума, чем подтверждается согласован-
ность коэффициентов Qn с условиями возбуждения бегущих волн квазиплоскими волнами, гене-
рируемыми наклонным ACT. Однако коэффициенты Qn в дополнение к указанию на оптимальные
Дефектоскопия
№ 8
2022
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
21
частоты и углы наклона дают также и количественную информацию, учитывающую амплитудно-
частотную характеристику источника, причем и для излучателей сложной формы (сфокусирован-
ные источники, фазированные решетки и т.п.). Такая информация принципиально недоступна при
использовании только законов преломления и отражения плоских волн.
Стремление значения критического угла θA к θR объясняется тем, что с ростом частоты дис-
персионные кривые ζA(f) асимптотически сближаются с лучом ζR = ω/cR, дающим дисперсионную
зависимость для волны Рэлея в полупространстве с теми же упругими свойствами, что и в окрест-
ности поверхности слоистого волновода. Этим объясняется и изгиб в окрестности f = 500 кГц как
дисперсионной кривой A0 на рис. 5б, так и соответствующей кривой θA(f) на рис. 6б. Он отражает
перестройку тенденции от сближения на низких и средних частотах к значениям характеристик
волны Рэлея для осредненных упругих модулей двуслойного образца к ее характеристикам для бо-
лее мягкого плексигласа при f→∞. Тем самым на высоких частотах оптимальным для возбуждения
моды A0 становится угол наклона θA = 0,12π (≈ 22°).
Интересно также отметить появление на высоких частотах (≈ 800—1000 кГц) дополнительной
полосы максимумов Qn, которая возникает на уровне предельного угла наклона θ = π/2 (90°), спу-
скаясь в этом диапазоне до 0,3π 0,4π. Ее появление обусловлено взаимодействием с пластиной
бокового лепестка диаграммы направленности поля источника p0, который растет с увеличением
частоты. Угол наклона квазиплоского фронта этого лепестка, очевидно гораздо меньше, чем у глав-
ного, и в указанном диапазоне совпадает со значениями критического угла θA(f).
На фиксированной частоте f каждая из этих полос дает локальное значение оптимального угла
наклона. В качестве примера на рис. 7 приведены нормированные вертикальные компоненты |az /v0|
амплитудного коэффициента асимптотики возбуждаемых бегущих волн (11) для моды A0 в зависи-
мости от θ на низких, средних и высоких частотах из рассматриваемого диапазона. Для двуслойной
пластины приведено два варианта зондирования: со стороны плексигласа и со стороны алюминия
(рис. 7б и 7в). Из-за большого акустического сопротивления даже пиковые значения амплитуды
смещений на поверхности алюминиевой пластины на четыре порядка меньше, чем смещения v0
звукового поля в свободном пространстве (рис. 7а). На высоких частотах 500 и 1000 кГц пиковые
значения на рис. 7б (плексиглас/алюминий) становятся на два порядка больше, а при зондировании
со стороны алюминия (см. рис. 7в), наоборот, проявляется только пик на частоте 200 кГц, в то вре-
мя как на высоких частотах они в масштабе рисунка не видны. Разная высота пиков указывает на
учет в асимптотике свойств материала через элемент матрицы Грина — сомножитель Rn. Он также
дает и обусловленную свойствами волновода частотную зависимость амплитуды an.
×10-4
а
б
×10-4
в
1,5
0,02
1,5
1
1
0,01
0,5
0,5
0
0,1
0,2
0,3
0,4
0,5
0
0,1
0,2
0,3
0,4
0,5
0
0,1
0,2
0,3
0,4
0,5
θ/π
θ/π
θ/π
f = 200 кГц
f = 500 кГц
f = 1000 кГц
Рис. 7. Зависимость амплитудного множителя |az/v0| фундаментальной моды A0 от угла наклона θ на различных часто-
тах f для однородной (а) и двуслойной (б, в) пластин.
Для иллюстрации частотной зависимости на рис. 8 приведены графики |az /v0| для фиксирован-
ных углов наклона θ = 0, 7,4° и 30°. Локальные максимумы данных кривых коррелируют с получа-
ющимися при сечении показанных на рис. 6 поверхностей Qn вдоль соответствующих горизонталь-
ных линий θ = const, но в них также учитывается и влияние зависящих от частоты сомножителей Rn
и 1/v0. Очевидно, лучшим из приведенных является угол θ = 7,4°, так как он обеспечивает близкую
к максимуму амплитуду колебаний поверхности образца в наиболее широком частотном диапазо-
не, попадая в коридор максимумов на рис. 6 для алюминиевого образца. Однако для пластин из
других материалов оптимальный угол наклона должен быть изменен, причем, судя по изгибу кори-
Дефектоскопия
№ 8
2022
22
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
а
б
в
–5
×10
×10-4
×10-5
5
1,5
5
θ = 0
θ = 0,042π (7,4°)
θ = 0,166π (30°)
4
4
1
3
3
2
2
0,5
1
1
0
200
400
600
800
1000
0
200
400
600
800
1000
0
200
400
600
800
1000
f, кГц
f, кГц
f, кГц
Рис. 8. Пример частотных зависимостей амплитудного множителя an в асимптотике бегущих волн (11) для фундамен-
тальной моды A0 на поверхности алюминиевой пластины при различных углах наклона источника θ: θ = 0 (а),
θ = 0,042π (б), θ = 0,166π (в).
дора на рис. 6б, для неоднородных пластин требуется тонкая настройка, учитывающая частотный
диапазон рассматриваемого преобразователя.
Высота источника d практически не влияет на положение точек максимума, т.е. на оптимальный
наклон источника. Математически это объясняется тем, что расстояния до поверхности dj входят
n j
d
в Qn только через экспоненты
e-σ
, в которых σn чисто мнимая, так как
ζ
<κ
(см. штриховую
n
0
n j
d
линию для
κ
на рис. 5). Поэтому их абсолютная величина |
|
1
e-σ
=
не зависит от расстояния dj.
0
В сумме по j эти экспоненты складываются при различных значениях сдвига фазы, но изменение
общего расстояния d при фиксированном наклоне источника этот сдвиг фаз не меняет. С физи-
ческой точки зрения независимость оптимальных θ от d можно объяснить тем, что угол наклона
квазиплоского фронта главного лепестка поля источника p0 к поверхности образца не зависит от
высоты. Меняется только расположение локальной области основного взаимодействия акустиче-
ского пучка с пластиной на ее поверхности.
n
d
Для горизонтального кругового источника (θ = 0)
Q
=
2
πiQ
(ζ
)e-σ
, где Q0 определяется
n
0
n
интегралом (8). При q0 = const он берется в явном виде:
Q
=
2q
J
(aζ
) (aζ
),
J1 — функция
0
0
1
n
n
Бесселя. При совпадении аргумента aζn с нулями функции J1, Qn = 0, т.е. на соответствующих
частотах n-тая мода не возбуждается. Например, на рис. 8а az = 0 на частоте f = 190 кГц, близкой
к центральной частоте преобразователя Sonatec CF200, так как aζ1 = 3,831 — первый ноль функ-
ции J1. И наоборот, |an| принимает максимальные значения в точках максимума Q0. На рис. 8а это
частоты f = 285 и 591 кГц, соответствующие точкам максимума aζ1 = 5,03 и 8,463. Это так называ-
емые частоты наилучшего возбуждения (sweet spots по терминологии, используемой в SHM для
генерации бегущих волн пленочными пьезопреобразователями [50]). Сопоставление графиков
на рис. 8а и 8в показывает, что при наклоне источника эти точки сгущаются, смещаясь влево.
ЗАКЛЮЧЕНИЕ
Дано обобщение полуаналитической модели работы бесконтактного воздушно-связного УЗ
преобразователя на случай его наклонного позиционирования для возбуждения бегущих волн в
инспектируемом образце. Показаны ее преимущества в плане физической наглядности волновой
структуры решения и значительно меньших вычислительных затратах, чем при использовании
МКЭ. Приводятся численные примеры, показывающие возможность определения оптимальных
углов наклона и частотных диапазонов с учетом волноводных свойств зондируемого образца, ко-
торый может быть не только изотропным упругим слоем, но и многослойным анизотропным ком-
позитом.
Работа выполнена в рамках проекта
№ FZEN-2020-0017 государственного задания
Минобрнауки России.
СПИСОК ЛИТЕРАТУРЫ
1. Викторов И.А. Физические основы применения ультразвуковых волн Рэлея и Лэмба в технике.
М.: Наука, 1966. 169 с.
2. Worlton D.С. Ultrasonic testing with Lamb waves // Nondestruct. test. 1957. V. 15. No 4. P. 218—222.
Дефектоскопия
№ 8
2022
Моделирование работы бесконтактного ультразвукового преобразователя в системах...
23
3. Лефельд В. Испытание листового материала, труб и штанг при помощи ультразвуковых поверх-
ностных и пластиночных волн / Труды Межд. симпозиума о применении ультразвука (русский пер.).
ЧССР, Братислава, сентябрь. 1962.
4. Farlow R., Kelly S.P., Hayward G. Advances in air coupled NDE for rapid scanning applications / 1994
Proceedings of IEEE Ultrasonics Symposium. 1994. V. 2. P. 1099—1102.
5. Grandia W., Fortunko C. NDE applications of air-coupled ultrasonic transducers / IEEE Ultrasonic
Symposium, Proceedings. 1995. V. 1. P. 697—709.
6. Castaings M., Cawley P. The generation, propagation, and detection of Lamb waves in plates using air-
coupled ultrasonic transducers // J. Acoust. Soc. Am. 1996. V. 100. No 5. P. 3070—3077.
7. Safaeinili A., Lobkis O.I., Chimenti D.E. Quantitative materials characterization using air-coupled leaky
Lamb waves // Ultrasonics. 1996. V. 34. P. 393—396.
8. Derusova D.A., Vavilov V.P., Druzhinin N.V., Kolomeets N.P., Chulkov A.O., Rubtsov V.E., Kolubaev E.A.
Investigating vibration characteristics of magnetostrictive transducers for air-coupled ultrasonic NDT of
composites // NDT & E International. 2019. V. 107. No. 102151. P. 1—10.
9. Derusova D.A., Vavilov V.P., Shpil’noi V.Y., Nekhoroshev V.O., Druzhinin N.V. Features of laser-
vibrometric nondestructive testing of polymer composite materials using air-coupled ultrasonic transducers //
Russian Journal of Nondestructive Testing. 2021. V. 57. No. 12. P. 1060—1071. [Дерусова Д.А., Вавилов В.П.,
Нехорошев В.О., Шпильной В.Ю., Дружинин Н.В. Особенности лазерно-виброметрического неразру-
шающего контроля полимерных композиционных материалов с использованием воздушно-связанных
ультразвуковых преобразователей // Дефектоскопия. 2021. № 12. С. 26—38.]
10. Rӧmmeler A., Zolliker P., Neuenschwander J. Air coupled ultrasonic inspection with Lamb waves in
plates showing mode conversion // Ultrasonics. 2020. V. 100. No. 105984. P. 1—12.
11. Green R.E. Non-contact ultrasonic techniques // Ultrasonics. 2004. V. 42. P. 9—16.
12. Chimenti D.E. Review of air-coupled ultrasonic materials characterization // Ultrasonics. 2014. V. 54.
No. 7. P. 1804—1816.
13. Рыков А.Н. Ультразвуковой акустический контроль с идентификацией дефектов изделий из по-
лимерных композиционных материалов // Контроль. Диагностика. 2018. № 2. С. 48—58.
14. Takahashi V., Lematre M., Fortineau J., Lethiecq M. Elastic parameters characterization of multilayered
structures by air-coupled ultrasonic transmission and genetic algorithm // Ultrasonics. 2022. V. 119. No. 10661.
P. 1—9.
15. Dahmen S., Ketata H., Hédi Ben Ghozlen M., Hosten B. Elastic constants measurement of anisotropic
Olivier wood plates using air-coupled transducers generated Lamb wave and ultrasonic bulk wave // Ultrasonics.
2010. V. 50. No. 4—5. P. 502—507.
16. Fang Y., Lin L., Feng H., Lu Zh., Emms G.W. Review of the use of air-coupled ultrasonic technologies
for nondestructive testing of wood and wood products // Computers and Electronics in Agriculture. 2017.
V. 137. P. 79—87.
17. Gómez Álvarez-Arenas T.E., Soto D.A. Characterization of mineral paper by air-coupled ultrasonic
spectroscopy // Ultrasonics. 2012. V. 52. No. 6. P. 794—801.
18. Evani S.K., Spalvier A., Popovics J.S. Air-coupled ultrasonic assessment of concrete rail ties // NDT &
E International. 2021. V. 123. No. 102511. P. 1—8.
19. Fariñas L., Sanchez-Torres E.A., Sanchez-Jimenez V., Diaz R., Benedito J., Garcia-Perez J.V. Assessment
of avocado textural changes during ripening by using contactless air-coupled ultrasound // Journal of Food
Engineering. 2021. V. 289. No. 110266. P. 1—9.
20. Kersemans M., Martens A., Van Den Abeele K., Degrieck J., Pyl L., Zastavnik F., Sol H.,
Van Paepegem W. The quasi-harmonic ultrasonic polar scan for material characterization: Experiment and
numerical modeling // Ultrasonics. 2015. V. 58. P. 111—122.
21. Martens A., Kersemans M., Daemen J., Verboven E., Van Paepegem W., Delrue S., Van Den Abeele K.
Characterization of the orthotropic viscoelastic tensor of composites using the Ultrasonic Polar Scan // Composite
Structures. 2019. V. 230. No. 111499. P. 1—10.
22. Kersemans M., Martens A., Degrieck J., Van Den Abeele K., Delrue S., Pyl L., Zastavnik F., Sol H.,
Van Paepegem W. The ultrasonic polar scan for composite characterization and damage assessment: past
present and future // Applied Sciences. 2016. V. 6. No. 2. P. 1—15.
23. Aanes M., Lohne K.D., Lunde P., Vestrheim M. Beam diffraction effects in sound transmission of a
fluid-embedded viscoelastic plate at normal incidence // J. Acoust. Soc. Am. 2016. V. 140. No. 1. P. EL67.
24. Huber A. Non-destructive testing of future rocket boosters using air-coupled ultrasound / Proceeding
of the 19th World Conference on Non-Destructive Testing (WCNDT 2016). (Germany, Munich, 13—17 June
2016). 2016. P. 1—9.
25. Adebahr W., Bernhardt Y., Kreutzbruck M. 3D-robotized air-coupled ultrasound measurements of
large components / Proceeding of the 19th World Conference on Non-Destructive Testing (WCNDT 2016)
(Germany, Munich, 1317 June 2016). 2016. P. 1—8.
26. Raghavan A., Cesnik C.E.S. Review of guided-wave Structural Health Monitoring // The Shock and
Vibration Digest. 2007. V. 39. P. 91—114.
Дефектоскопия
№ 8
2022
24
Е.В. Глушков, Н.В. Глушкова, О.А. Ермоленко
27. Giurgiutiu V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors, 2nd Edition. New-
York: Elsevier Academic Press, 2014. 1032 p.
28. Ramadas C., Hood A., Khan I., Balasubramaniam K., Joshi M. An experimental study on the behavior
of A0 mode transduced using misaligned air-coupled transducers in composite laminates // Applied Acoustics.
2014. V. 83. P. 141—149.
29. Бреховских Л.M. Волны в слоистых средах. М.: Наука, 1973. 342 с.
30. Шендеров Е.Л. Излучение и рассеяние звука. Л.: Судостроение, 1989. 304 с.
31. Junger M.C., Feit D. Sound structures and their interaction / 2nd Edition. Boston, MA: MIT Press,
1986. 462 p.
32. Hosten B., Biateau Ch. Finite element simulation of the generation and detection by air-coupled
transducers of guided waves in viscoelastic and anisotropic materials // J. Acoust. Soc. Am. 2008. V. 123.
No. 4. P. 1963—1971.
33. Masmoudi M., Castaings M. Three-dimensional hybrid model for predicting air-coupled generation of
guided waves in composite material plates // Ultrasonics. 2012. V. 52. No. 1. P. 81—92.
34. Глушков Е.В., Глушкова Н.В., Евдокимов А.А. Гибридная численно-аналитическая схема для рас-
чета дифракции упругих волн в локально неоднородных волноводах // Акустический журнал. 2018.
Т. 64. № 1. C. 3—12.
35. Eremin A.A., Glushkov E.V., Glushkova N.V. Application of Piezoelectric Wafer Active Sensors
for Elastic Guided Wave Excitation and Detection in Structural Health Monitoring Systems for Elongated
Constructions // Russian Journal of Nondestructive Testing. 2020. V. 56. No. 10. P. 795—809. [Еремин А.А.,
Глушков Е.В., Глушкова Н.В. Применение пленочных пьезопреобразователей для возбуждения и реги-
страции бегущих упругих волн в системах активного мониторинга протяженных конструкций // Дефек-
тоскопия. 2020. № 10. С. 24—38.]
36. Глушков Е.В., Глушкова Н.В., Мякишева О.А. Распределение энергии ультразвукового излучателя
между бегущими волнами, возбуждаемыми в погруженном упругом волноводе // Акуст. журн. 2019.
Т. 65. № 6. С. 723—735.
37. Glushkov E.V., Glushkova N.V., Miakisheva O.A. Backward waves and energy fluxes excited in acoustic
medium with an immersed plate // Ultrasonics. 2019. V. 92. P. 158—168.
38. Титов С.А., Маев Р.Г., Богаченков А.Н. Линзовый многоэлементный акустический микроскоп в
режиме измерения параметров слоистых объектов // Акуст. журн. 2017. Т. 63. № 5. С. 546—552.
39. Morokov E., Levin V., Chernov A., Shanygin A. High resolution ply-by-ply ultrasound imaging of impact
damage in thick CFRP laminates by high-frequency acoustic microscopy // Composite Structures. 2021. V. 256.
No. 113102. P. 1—13.
40. Исакович М.А. Общая акустика. М.: Наука, 1973. 496 с.
41. Глушков Е.В., Глушкова Н.В. Бегущие волны в многослойных анизотропных композитах // ПММ.
2021. Т. 85. Вып. 3. С. 296—308.
42. Joly P. An elementary introduction to the construction and the analysis of perfectly matched layers for
time domain wave propagation // SeMA J. 2012. V. 57. P. 5—48.
43. Ворович И.И., Бабешко В.А. Динамические смешанные задачи теории упругости для некласси-
ческих областей. М.: Наука, 1979. 320 с.
44. Глушкова Н.В., Фоменко С.И. Эффект эстафетной передачи энергии между модами бегущих
волн / Труды VII Всероссийской конференции по механике деформируемого твердого тела (Ростов-на-
Дону, 15 — 18 октября 2013 г.). 2013. Т. 1. С. 159—163.
45. Glushkov E, Glushkova N., Fomenko S. Wave energy transfer in elastic half-spaces with soft interlayers
// J. Acoust. Soc. Am. 2015. V. 137. No. 4. P. 1802—1812.
46. Меркулов Л.Г. Затухание нормальных волн в пластинах, находящихся в жидкости // Акуст. журн.
1964. Т. 10. № 2. С. 206—212.
47. Rokhlin S.I., Chimenti D.E., Nayfeh A.H. On the topology of the complex wave spectrum in a fluid-
coupled elastic layer // J. Acoust. Soc. Am. 1989. V. 85. No. 3. P. 1074—1080.
48. Shuvalov A.L., Poncelet O., Deschamps M. Analysis of the dispersion spectrum of fluid-loaded
anisotropic plates: leaky-wave branches // J. Sound Vib. 2006. V. 296. P. 494—517.
49. Sessarego J.-P., Sagéloli J., Gazanhes C., Überall H. Two Scholte-Stoneley waves on doubly fluid-
loaded plates and shells // J. Acoust. Soc. Am. 1997. V. 101. No. 1. P. 135—142.
50. Giurgiutiu V. Tuned Lamb wave excitation and detection with piezoelectric wafer active sensors for
structural health monitoring // J. Intell. Mater. Syst. Struct. 2005. V. 16. P. 291—305.
Дефектоскопия
№ 8
2022