УДК 620.179.16
ИММЕРСИОННЫЙ КОНТРОЛЬ ОБЪЕКТОВ КРИВОЛИНЕЙНОГО ПРОФИЛЯ
ПОВЕРХНОСТНЫМИ УЛЬТРАЗВУКОВЫМИ ВОЛНАМИ
© 2022 г. Г.Я. Дымкин1,2,*, А.В. Кириков3,**, К.А. Бондарчук2,***
1АО «НИИ мостов», Россия 190013 Санкт-Петербург, Московский пр-т, 22
2ФГБОУ ВО ПГУПС, Россия 190068 Санкт-Петербург, Московский пр-т, 9
3«Nordinkraft AG», 75196 Remchingen, Schauinslandstr, 16
E-mail: *gdymkin@gmail.com; **andrej.kirikov@nordinkraft.de; ***bondarchukksenya1801@gmail.com
Поступила в редакцию 07.06.2022; после доработки 02.07.2022
Принята к публикации 08.07.2022
Предложен способ контроля изделий с плоской и криволинейной поверхностью с применением поверхностных
ультразвуковых волн в иммерсионном варианте. Теоретическими и экспериментальными исследованиями показано, что
при протяженности зоны контроля от 20λ до 50λ комплексное применение эхо-импульсного совместно с амплитудным
и временным вариантами теневого метода обеспечивает возможность выявления на плоских и криволинейных поверх-
ностях как трещин, так и дефектов с гладким профилем глубиной от долей длины волны. Результаты исследований
использованы при разработке установки автоматического контроля рельсов в потоке производства, испытания которой
подтвердили высокую чувствительность и помехозащищенность иммерсионного контроля поверхностными волнами.
Ключевые слова: ультразвуковой контроль, поверхностные волны, криволинейный профиль, иммерсионный вари-
ант, дефекты с гладким профилем, трещины.
DOI: 10.31857/S0130308222080036, EDN: BQCJMU
ВВЕДЕНИЕ
Для решения задач, связанных с высокопроизводительным контролем поверхности длинно-
мерных изделий, например рельсов, в условиях их промышленного производства, применяют
вихретоковый метод и реализующие его средства неразрушающего контроля. Присущие им недо-
статки и ограничения — низкая чувствительность по отношению к некоторым типам дефектов,
сравнительно невысокая помехозащищенность по отношению к электромагнитному фону метал-
лургического предприятия и остаточной намагниченности объекта контроля, трудности примене-
ния на криволинейных участках профиля, необходимость размещать вихретоковые датчики почти
вплотную к движущемуся объекту контроля, а также малая глубина проникновения вихревых
токов в ферромагнитные металлы и сплавы, инициируют интенсивные поиски альтернативных
методов и средств обнаружения поверхностных и подповерхностных дефектов длинномерных
изделий.
Одной из таких альтернатив, потенциально снимающих большую часть ограничений, прису-
щих вихретоковому контролю, является применение поверхностных ультразвуковых волн.
Поверхностные ультразвуковые волны рэлеевского типа находят широкое применение в
задачах дефектоскопии [1]. С практической точки зрения преимущества волн Рэлея, распростра-
няющихся вдоль свободной поверхности твердого тела, связаны, прежде всего, с их локализаци-
ей в поверхностном слое и, вследствие этого, высокой чувствительностью к поверхностным
дефектам и более медленным, чем для объемных волн, спадом амплитуды с расстоянием.
Поверхностные несовершенства, возникающие как при изготовлении, так и при эксплуатации
металлоизделий (трещины, волосовины, плены, отпечатки и др.), имеют разнообразную форму
и не только приводят к изменению амплитудных и временных параметров прошедшего сигнала,
но и создают рассеянные рэлеевскую и объемные продольную и поперечную волны, что обу-
славливает возможность применения как эхо-импульсного, так и теневого методов ультразвуко-
вого контроля. Важно также, что волны рэлеевского типа могут распространяться вдоль криво-
линейных (выпуклой и вогнутой) поверхностей, что позволяет выявлять неоднородности на
поверхностях сложной формы [2].
В то же время волны Рэлея характеризуются высокой чувствительностью к контакту поверх-
ности с другой средой [3], в частности к наличию на поверхности слоя жидкости или локальных
капель и загрязнений, следствием чего является рассеяние на зоне контакта (что вызывает появле-
ние помех), а также трансформация рэлеевской волны в зоне контакта в неоднородную волну,
уносящую энергию в среду, контактирующую с поверхностью, что приводит к уменьшению длины
прозвучиваемого участка поверхности.
26
Г.Я. Дымкин, А.В. Кириков, К.А. Бондарчук
Указанный недостаток обуславливает интерес к возможности выполнения контроля в иммер-
сионном варианте, т.е. при погружении объекта контроля в жидкую среду, что, безусловно, умень-
шит длину контролируемого участка, но в то же время исключит условия для рассеяния поверх-
ностных волн на локальных загрязнениях поверхности.
Поверхностные волны на плоской границе твердого полупространства с жидким слоем конеч-
ной и бесконечной толщины теоретически и экспериментально исследованы в работах
И.А. Викторова [5, 6], где получены аналитические выражения и даны оценки дисперсии фазовой
скорости волн и затухания. Закономерности и эффективность преобразования поверхностных волн
в объемные продольные, излучаемые в контактирующую с твердым телом жидкость, изучены в
[7], где авторы ограничились решением двумерной задачи. Конечность размеров излучателя в пло-
скости, перпендикулярной плоскости падения, обуславливает направленность поля возбужденной
рэлеевской волны, изученную И.А. Викторовым [8] применительно к импульсному режиму.
Исследования закономерностей взаимодействия волн Рэлея с щелями прямоугольной формы и
полуцилиндрическими канавками, а также распространения их по поверхности сложной геоме-
трии (например, пилообразной или шероховатой) представлены, в частности, в эксперименталь-
ных работах [9, 10]. В [11] показано, что для прямоугольной канавки малой глубины коэффициен-
ты отражения (Rd) и прохождения (Dd) в стали и дюралюминии отличаются незначительно; это
позволяет сравнивать экспериментальные данные, полученные для границы воздух—сталь в
лабораторных условиях, и данные, полученные в [9] для границы воздух—дюралюминий.
Наличие указанных фундаментальных теоретических и экспериментальных результатов созда-
ет необходимую базу для изучения эхо-импульсного и теневого методов иммерсионного контроля
изделий с неплоской поверхностью поверхностными квазирэлеевскими волнами.
С целью исследования закономерностей распространения, отражения и прохождения поверх-
ностных волн при расположении изделия в иммерсионной среде рассмотрим расположенное в
жидкости твердое тело, поверхность которого имеет плоские и цилиндрический (выпуклый или
вогнутый) участки. Поверхностная волна, возбужденная на плоском участке твердого тела мето-
дом клина с помощью прямого пьезопреобразователя, расположенного в иммерсионной жидкости
под рэлеевским углом, распространяется в направлении перпендикулярном образующей цилин-
дра, встречая на своем пути поверхностный дефект в виде узкой прямоугольной (модель трещины)
или полуцилиндрической (модель неровности) канавки, расположенной на криволинейном или
плоском участке поверхности, ориентированной перпендикулярно направлению распространения
волны и перекрывающей всю ширину пучка поверхностных волн.
Рассмотрим далее акустические тракты для поставленной задачи. При выводе аналитических
выражений для амплитуд теневого и эхосигнала положим, что: однородное, изотропное и идеально
упругое твердое тело расположено в идеальной жидкости; радиус кривизны поверхности твердого
тела много больше длины волны; путь от излучающего и приемного преобразователей до поверх-
ности твердого тела, проходимый волной в жидкости, не превышает величину ближней зоны пре-
образователя; модели дефектов, расположенные в слое локализации поверхностных волн (порядка
полутора длин волн), удалены от точек возбуждения и приема поверхностных волн на расстояние,
значительно превышающее длину волны. Возможная протяженность акустического тракта при
иммерсионном контроле поверхностными волнами (величина зоны контроля) определяется зату-
ханием поверхностных волн за счет излучения в жидкость [5]. Теоретическая и экспериментальная
оценка спада амплитуды поверхностной волны с расстоянием (рис. 1) показывает, что при иммер-
сионном варианте контроля наличие толстого слоя жидкости на поверхности изделия весьма зна-
чительно (с 0,01 до 0,5—0,6 дБ на длину волны) увеличивает ослабление амплитуды распростра-
няющейся поверхностной волны. В то же время, физические свойства иммерсионной жидкости
незначительно влияют на затухание поверхностной волны и на возможности ультразвукового
контроля соответственно.
Таким образом, протяженность эффективной зоны иммерсионного контроля поверхностными
волнами для применяемых методов контроля составляет от 20λ до 50λ и при практически реали-
зуемых параметрах ультразвукового преобразователя (размерах активной зоны, частоте, расстоя-
нии в иммерсионной жидкости до объекта контроля) находится преимущественно в ближней зоне
поля. Для решения поставленных в настоящей работе инженерных задач ограничимся при анализе
акустического тракта энергетическим приближением, дающим достаточную точность.
Экспериментальные исследования методов иммерсионного контроля поверхностными волна-
ми, выполненные в настоящей работе для верификации и дополнения теоретических оценок, про-
ведены с использованием специализированной дефектоскопической аппаратуры и серийных при-
боров, пьезоэлектрических преобразователей для контактного и иммерсионного контроля с рабо-
Дефектоскопия
№ 8
2022
Иммерсионный контроль объектов криволинейного профиля...
27
ΔA(x), дБ
0
Воздух
-4
3 МГц
2,3 МГц
-8
1 МГц
эксперимент
Масло
-12
Вода
x x
-16
0
5
10
15
20
25
λ λ
R
Рис. 1. Ослабление амплитуды поверхностной волны с расстоянием.
чими частотами 1—3 МГц, иммерсионной ванны с механизмами позиционирования. В стальных
образцах для исследований фрезерованием выполнены канавки прямоугольной и цилиндрической
формы и переменой глубины. Все измерения выполняли многократно с исключением резко откло-
няющихся значений. По данным измерений рассчитывали средние значения и 95 % доверительные
интервалы, показанные на рисунках с экспериментальными данными.
ТЕНЕВОЙ МЕТОД
Наличие повреждений поверхности обуславливает изменение как амплитудных, так и времен-
ных параметров импульсов поверхностных ультразвуковых волн, распространяющихся по участку
изделия. Регистрация этих изменений, являющихся признаком наличия дефекта, лежит в основе
амплитудного и временного теневого методов.
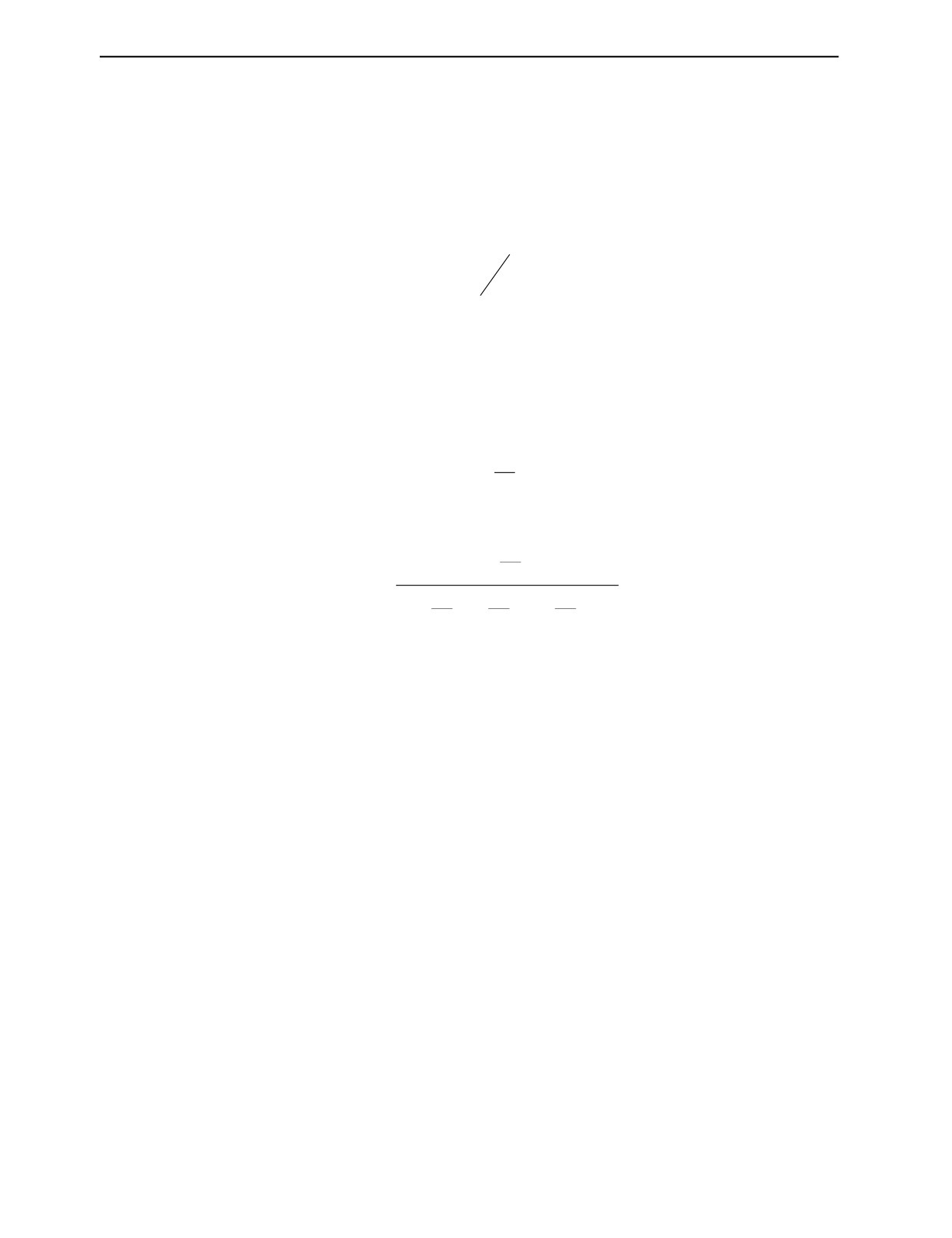
На рис. 2 представлены общая схема, модели дефектов и модель акустического тракта тенево-
го метода, на которой отмечен криволинейный участок твердого тела.
а
б
в
г
сlж
ρж
сlж
ρт
Рис. 2. Общая схема акустического тракта теневого метода контроля поверхностными волнами (а); модели дефектов:
полуцилиндрическая канавка (б), прямоугольная канавка (в); модель акустического тракта (г).
Дефектоскопия
№ 8
2022
28
Г.Я. Дымкин, А.В. Кириков, К.А. Бондарчук
На рисунке приняты следующие обозначения: ρж, ρт — плотности жидкости и твердого тела
соответственно; сlж — скорость продольной волны в жидкости; cS, cSr — скорости поверхностных
волн в твердом теле, граничащем с жидкостью, на его плоской и криволинейной поверхностях
соответственно; x — длина пути поверхностной волны в акустическом тракте (от излучателя до
приемника); xr — длина криволинейного (выпуклого или выгнутого) цилиндрического участка
поверхности радиусом r.
Акустический тракт амплитудного теневого метода будем характеризовать отношением ампли-
т
туды сигнала, прошедшего тракт с дефектом (
)
d
A
, к амплитуде сигнала на бездефектном участке
т
(
A0
)
— коэффициентом выявляемости дефекта:
т
т
Ad
K
=
(1)
т
A
0
Iт сигнала поверхностной волны,
прошедшей акустический тракт, представленный на рис. 2г, в виде:
т
b)
x,r,
I
d
и
=I b,x)D
d
(
h
,
d d
s
)
a
x
r
)
,
(2)
где Iи — интенсивность излученной волны в твердое тело;
ющий уменьшение интенсивности за счет расхождения пучка поверхностных волн при распро-
странении. Для ближней зоны, в которой фронт волны можно считать плоским,
, а для
2
b
дальней зоны (цилиндрический фронт) —
Q
(
b,
x
)
=
;
D
(
h
,s
)
— коэффициент прохождения
d
d d
λx
через дефект по интенсивности;
K
a
(
b
)
— коэффициент осевой концентрации поля поверхност-
ных волн, излучаемых преобразователем шириной b, который для ближней зоны принимает значе-
2
2π
0,5
b
λ
x,r,
ние
K
=1, для дальней зоны —
K
=
;
x
a
a
r
) — коэффициент,
2
π
2
π
2π
cos
b
+
b⋅Si
b−
1
λ
λ
λ
характеризующий уменьшение интенсивности за счет затухания поверхностной волны при ее
распространении вдоль границы с жидкостью (см. рис. 1) и переизлучения объемных волн на
участке вогнутой криволинейной поверхности [4].
Потери энергии и соответственно значения коэффициентов прохождения при огибании
поверхностной волной трещиноподобных и пологих дефектов обуславливаются: отражением
поверхностной волны от встречающихся на ее пути перегибов (углов) поверхности, дополнитель-
ным затуханием за счет излучения объемных волн при распространении волны вдоль вогнутого
участка поверхности, а также рассеянием в виде объемных волн, возникающих вследствие диф-
ракции на острых углах и участках с радиусом меньше длины волны [12].
C учетом принятых допущений и выражений для потерь на границе с жидкостью и на вогнутой
криволинейной поверхности из [4, 7] формулы для амплитуд теневых сигналов и коэффициентов
т
т
выявляемости протяженных прямоугольной (
K
dп
) и полуцилиндрической (
K
dц
) канавок, ориен-
тированных перпендикулярно пучку могут быть записаны в виде:
т
K
=D
,
(3)
d
п
dп
где Ddп — коэффициент прохождения по амплитуде для узкой прямоугольной канавки малой глу-
бины, выражение для которого получено в [10]:
т
K
=
exp
−
(
α
+α
s
−
s
+α
s
−α
s
,
(4)
dц
R
S
)(
dr
d
)
Sr d
Sr
dr
d
d
d
где αR, αS — коэффициенты затухания поверхностной волны при распространении вдоль границы
раздела твердая среда—воздух и твердая среда—жидкость соответственно; αSr, α
— коэффици-
Srd
енты дополнительного затухания поверхностной волны на вогнутых цилиндрических участках
поверхности радиусами r и rd соответственно, обеспечивающие, как следует из [4, 9], приемлемую
точность как при больших, так и при малых волновых радиусах кривизны; s
— длина пути по
drd
поверхности канавки.
Дефектоскопия
№ 8
2022
Иммерсионный контроль объектов криволинейного профиля...
29
Необходимо отметить, что приведенные формулы не учитывают дифракционных эффектов,
приводящих к преобразованию поверхностных волн в объемные, рассеиваемые дефектом.
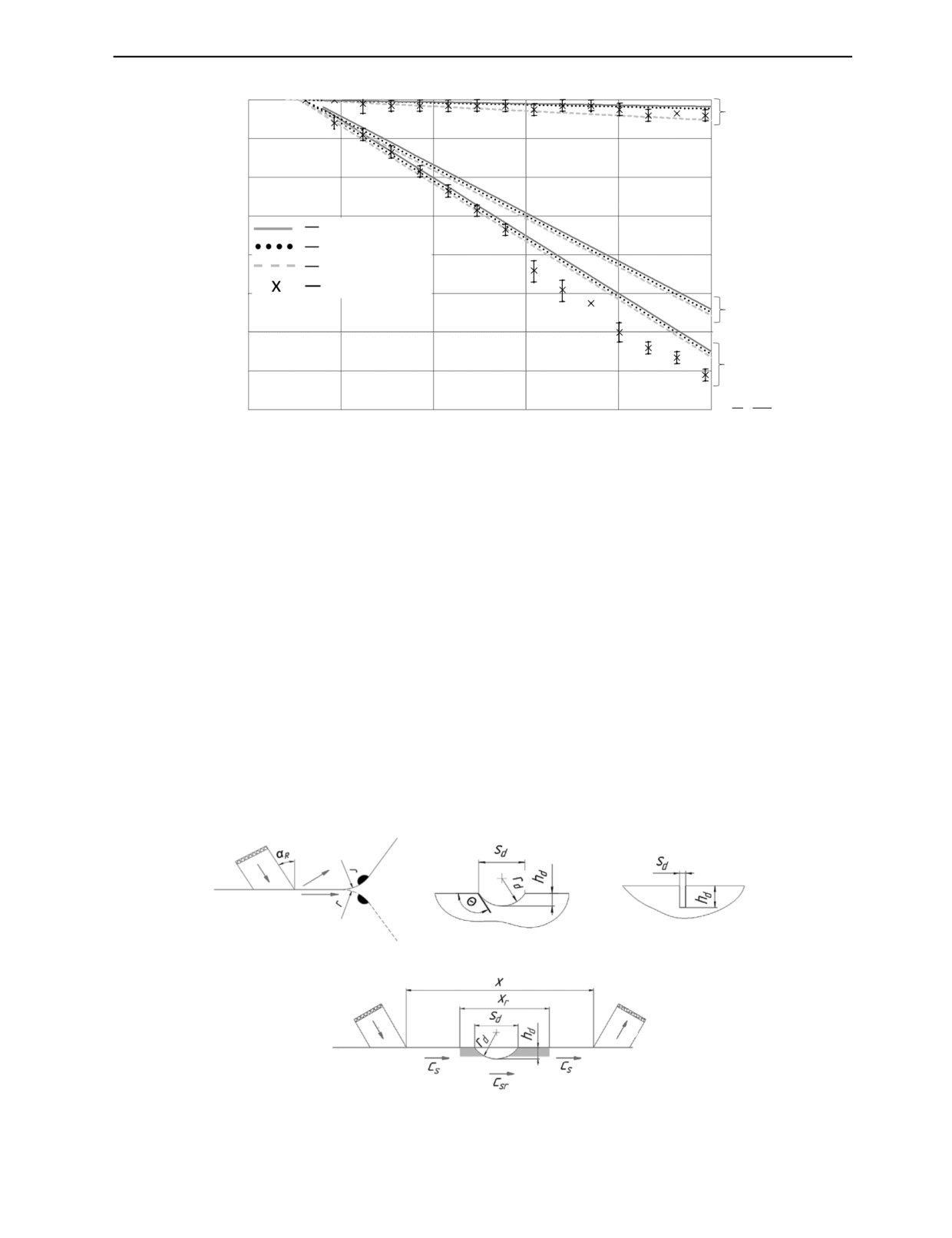
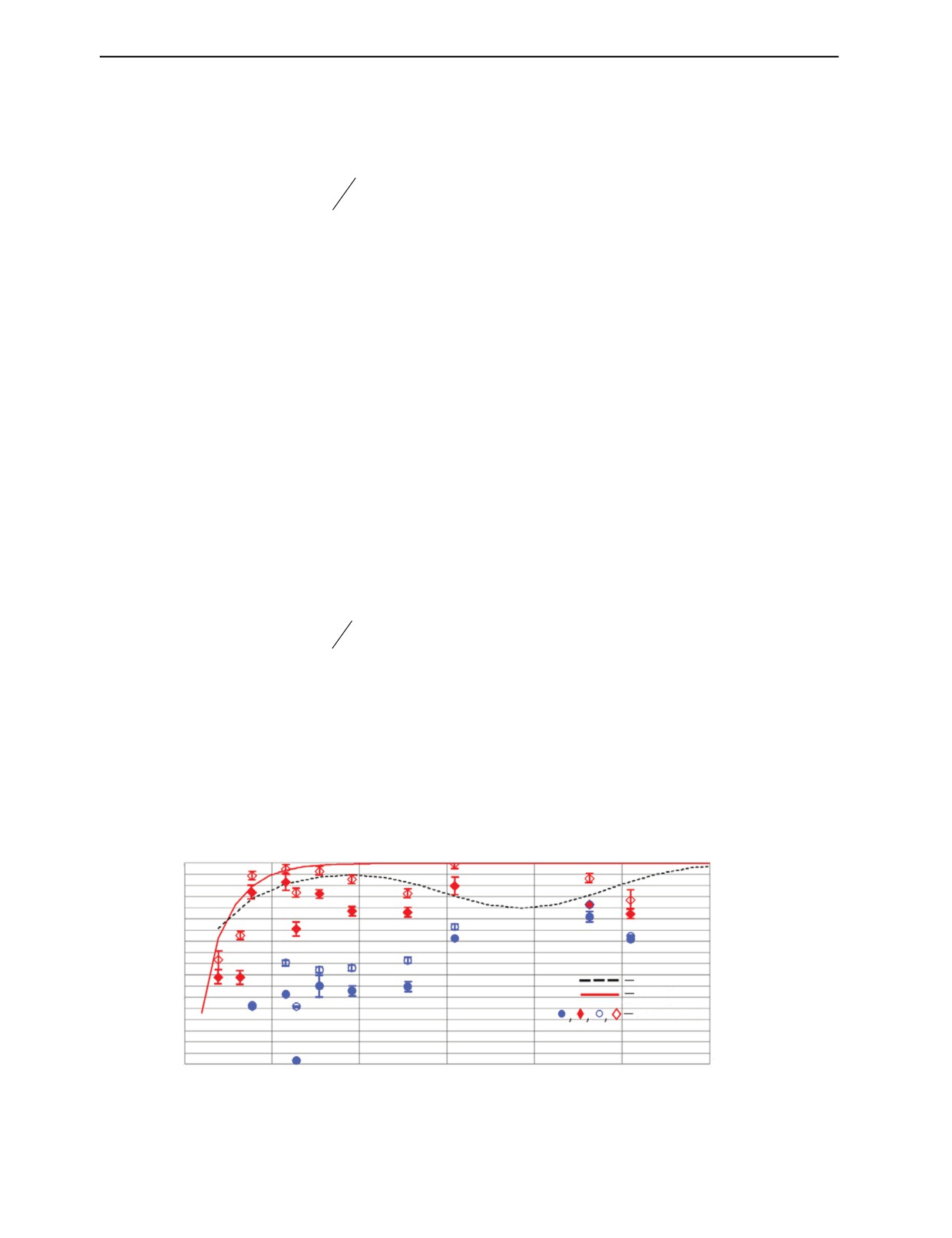
Результаты выполненных в работе экспериментальных исследований ослабления амплитуды
теневого сигнала от глубины прямоугольной и полуцилиндрической канавок, а также данные, рас-
считанные по (3), (4) и представленные в [9], показаны на рис. 3.
Kdт, дБ
0
(3)
(4)
-4
[9]
эксперимент
-8
-12
-16
-20
h
h
d
d
0
0,2
0,4
0,6
0,8
1
1,2
λ λ
R
Рис. 3. Коэффициенты выявляемости узкой (sd/λ → 0) прямоугольной (♦, ◊) и полуцилиндрической (sd /λ ≈ 5) (●, ○)
канавок глубиной hd при теневом методе контроля поверхностными волнами: ◊, ○ — сталь—воздух; ♦, ● — сталь—вода.
Как видно, экспериментальные данные для коэффициентов выявляемости прямоугольной
канавки на свободной поверхности стального образца и при иммерсионном контроле (см. рис. 3)
удовлетворительно согласуются с расчетами по формуле (3) для малых глубин дефекта и с резуль-
татами, полученными в [9] для алюминиевых образцов. Отличие теоретических результатов от
данных эксперимента при глубинах канавки больших половины длины волны обусловлено,
по-видимому, использованием приближения, не учитывающего влияние волн, огибающих трещи-
ну (прямоугольную канавку), распространяясь вдоль ее граней. С увеличением отношения hd/sd
коэффициенты выявляемости для прямоугольной (трещиноподобной) и гладкой канавки с полу-
цилиндрическим дном сближаются.
В процессе экспериментальных исследований теневого метода установлено также, что сни-
жение эффективности возбуждения поверхностной волны в случае, когда дефект оказывается в
зоне падающего пучка, оказывает более значительное влияние на амплитуду теневого сигнала,
чем рассеяние распространяющейся поверхностной волны дефектом. Этот эффект, проявляю-
щийся в снижении коэффициента преобразования продольной волны в жидкости в поверхност-
ную волну, — «параметрический» эффект, определяюще зависит от формы поверхностного
дефекта и отношения размеров дефекта и зоны возбуждения, не поддается аналитической оцен-
ке, однако может быть эффективно использован при практическом контроле.
Результаты проведенных исследований акустического тракта амплитудного теневого метода
иммерсионного контроля поверхностными волнами показывают:
1) коэффициенты выявляемости трещиноподобных (прямоугольная канавка) и гладких (полу-
цилиндрическая канавка) поверхностных дефектов слабо зависят от акустических характеристик
металла и среды, с которой контактирует контролируемая поверхность;
2) при расположении металлического изделия как в воздухе, так и в воде приемлемый для
практических задач дефектоскопии коэффициент выявляемости обеспечивается для перпендику-
лярных направлению распространения волны дефектов глубиной более (0,3—0,5)λ.
Для оценки влияния геометрии и размера канавки на временной сдвиг Δt прошедшего импуль-
са поверхностной волны, являющийся признаком дефекта при временном теневом методе, выпол-
ним расчеты времени распространения, полагая вслед за [4], что траектория распространения
импульса повторяет форму дефекта.
В таком случае, в предположении, что поверхностная волна последовательно распространя-
ется вдоль передней и задней граней прямоугольной канавки с пренебрежимо малым раскрыти-
ем (sd → 0), разница между временами распространения сигнала на дефектном и бездефектном
участках может быть определена по простой формуле:
Дефектоскопия
№ 8
2022
30
Г.Я. Дымкин, А.В. Кириков, К.А. Бондарчук
2h
d
s
d
2h
d
∆t
п
=
−
≈
(5)
c
c
c
S
S
S
Для полуцилиндрической канавки необходимо учитывать также, что скорость поверхностной
волны на криволинейной поверхности канавки зависит от радиуса кривизны, а скоростная поправ-
ка, согласно [4, 9], справедлива как для малых, так и больших радиусов. При этом в важном для
практики диапазоне радиусов канавки изменение скорости поверхностной волны пренебрежимо
мало (менее 0,04).
Рассчитав длину sdr
пути импульса по поверхности полуцилиндрической канавки шириной sd
d
и глубиной hd и используя результаты [4], получим аналитические выражения для времени рас-
пространения поверхностных волн по участку, включающему канавку, позволяющие проанализи-
ровать закономерности влияния размеров канавки на временной сдвиг (Δt ) прошедшего сигнала,
rd
регистрируемого при теневом методе:
2
2
s
+
4h
4
h
s
d
d
d d
π
⋅arcsin
2
2
8
h
s
+
4h
1
d
d
d
∆t
=
⋅
×
r
d
90
c
R
-1
2
2
2
2
(6)
s
k
e
s
s k
e
s
2s
k
S q
R S
t
1+
+
1−
+
1+
-
1−
-
−1
2
2
2
2
q
2se
q
q
2
se
q
k
k
S
q
t
l
s
d
×
1−
-
,
2
c
s
e
e
4
k
s k
R
q
S
R
t
k
r
1−
−
+
−1
R d
2
2
qe
S
e
q
k
t
k
l
2
2
2
2
где
s= k
R
−k
t
;
q= k
R
−k
l
; eq = exp[2arcth(q/kR)]; eS = exp[2arcth(s/kR)]; kt, kl, kS — волновые
числа поперечной, продольной, поверхностной волн соответственно.
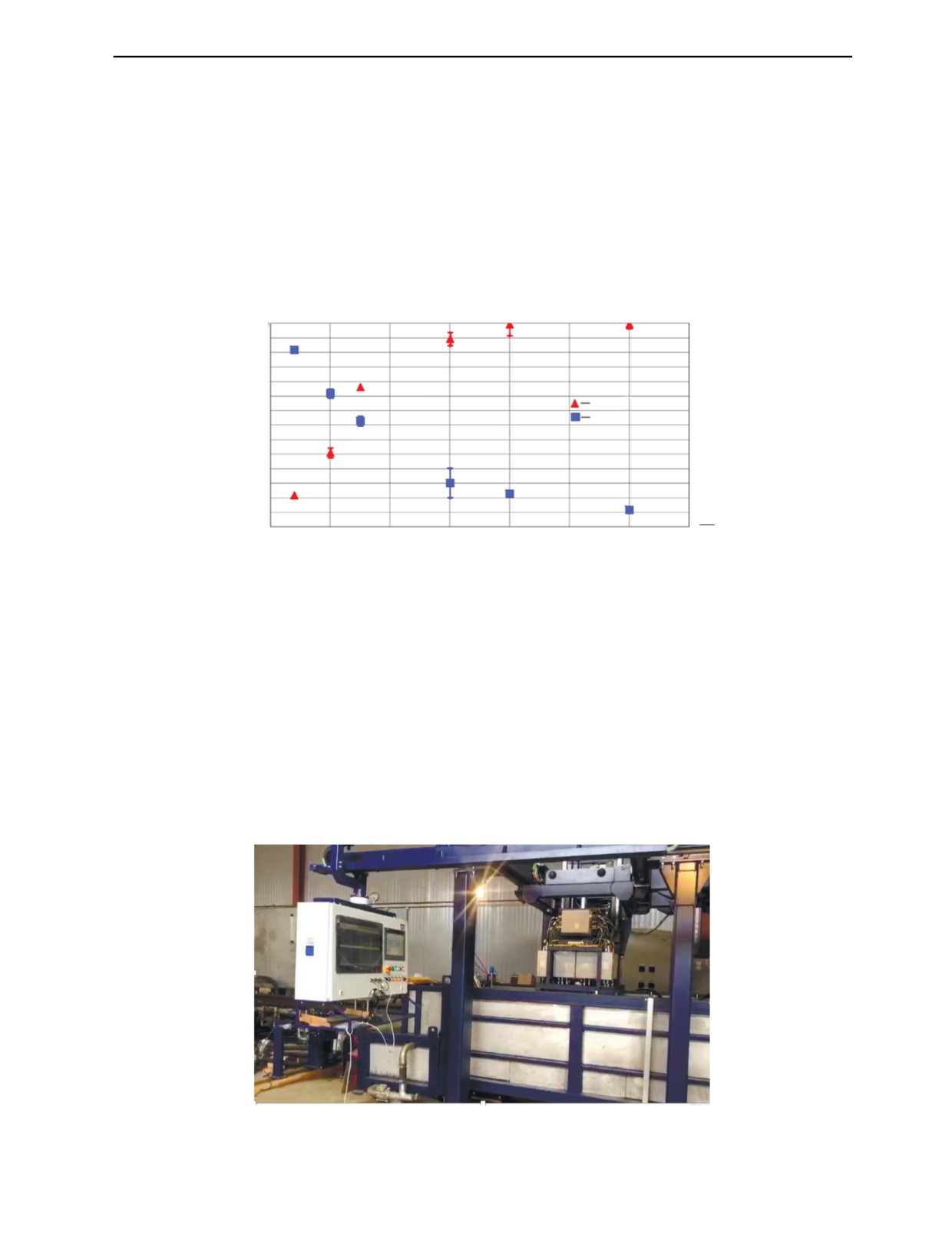
Результат расчета по выражению (6) представлен на рис. 4.
Δt, нс
1000
800
sd = 2λ
600
sd = 4λ
sd = 6λ
400
200
0
hd/λ
0
0,2
0,4
0,6
0,8
1
1,2
Рис. 4. Зависимость временного сдвига прошедшего сигнала поверхностной волны от волновой глубины hd/λ
прямоугольной (―) и полуцилиндрической (―) канавок.
Выполненный анализ временного варианта теневого метода позволяет заключить, что: зависи-
мость временного сдвига (задержки) импульса поверхностной волны при прохождении им как
прямоугольной, так и полуцилиндрической канавок практически линейно зависит от волновой
глубины канавки hd/λ; с ростом ширины полуцилиндрической канавки временной сдвиг значи-
тельно снижается.
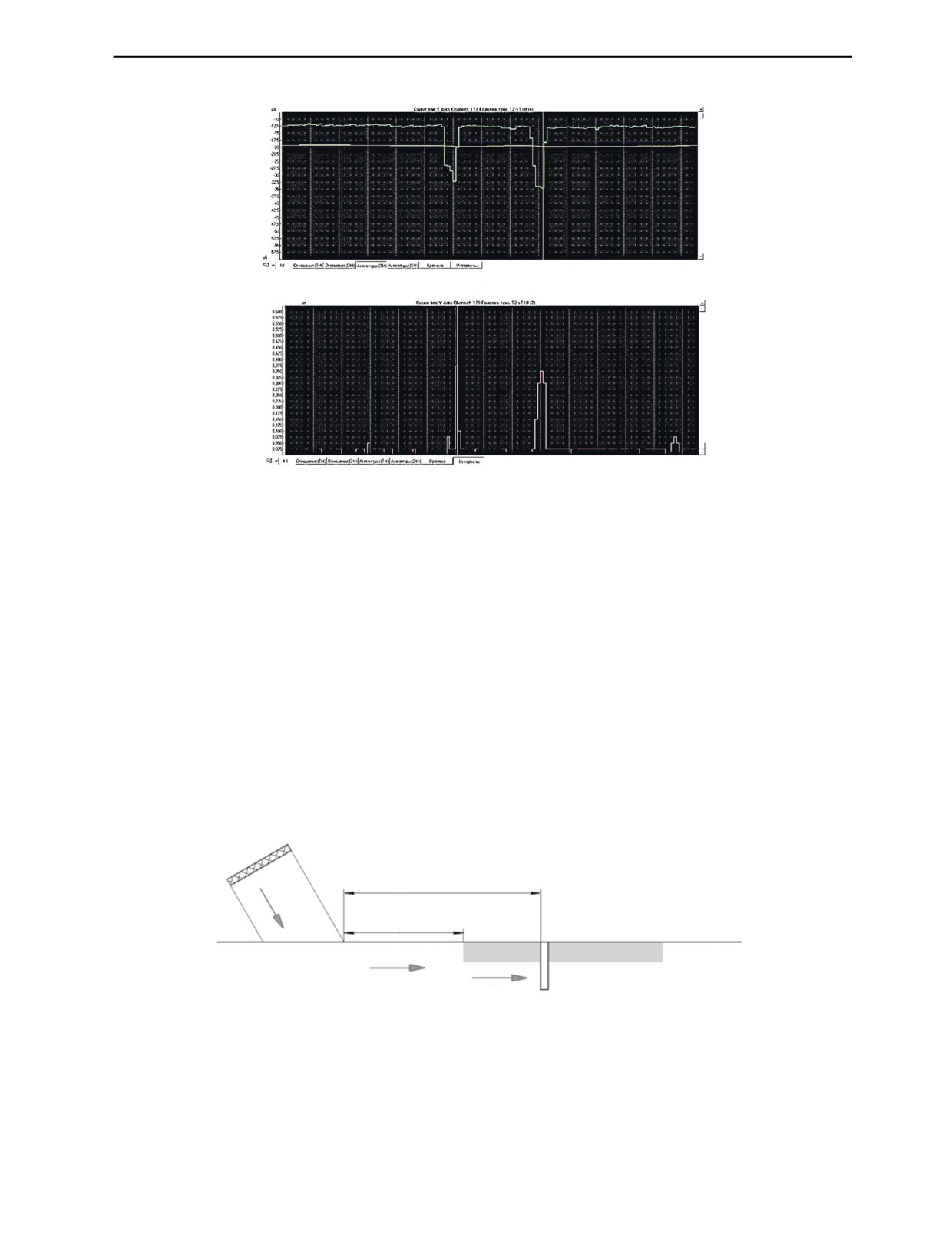
На рис. 5 представлены полученные при контроле динамические огибающие амплитуды и вре-
менного сдвига сигнала, прошедшего по поверхности изделия, на которой имеются два дефекта.
Дефектоскопия
№ 8
2022
Иммерсионный контроль объектов криволинейного профиля...
31
а
б
Рис. 5. Динамические огибающие амплитуды (а) и временного сдвига (б) теневого сигнала при перемещении по поверх-
ности изделия, на которой имеются два дефекта.
Как видно, падение амплитуды прошедшего (теневого) сигнала сопровождается увеличением вре-
мени его распространения, что подтверждает эффективность совместного использования ампли-
тудного и временного вариантов теневого метода контроля поверхностными волнами. Регистрация
двух параметров будет способствовать повышению помехозащищенности контроля и предостав-
ляет потенциальные возможности оценки глубины (размера) выявленного дефекта.
ЭХО-ИМПУЛЬСНЫЙ МЕТОД
Для эхометода контроля совмещенным преобразователем и бесконечно протяженной канавки
может быть принята модель акустического тракта, отличие которой от рассмотренной выше моде-
ли для теневого метода заключается в необходимости учета не коэффициента прохождения, а
коэффициента отражения от дефекта, а геометрическая разница сводится к тому, что для эхомето-
да расстояния, пройденные волной на всех участках пути от излучателя до дефекта и обратно,
равны (рис. 6).
xd
clж
xp
cs
csr
Рис. 6. Модель акустического тракта эхометода ультразвукового контроля поверхностными волнами.
По аналогии с приведенным ранее выражением для теневого метода (2) запишем интенсив-
ность эхосигнала от дефекта в виде:
Дефектоскопия
№ 8
2022
32
Г.Я. Дымкин, А.В. Кириков, К.А. Бондарчук
э
b)
I
d
и
=I b
x
d
)
R
d
(
h
,
d d
s
)
a
Ψ
(
x
d
, x
p
,r
).
(7)
При расположении дефекта на акустической оси преобразователя
K
a
=1. В таком случае для
дальней зоны амплитуду эхосигнала можно записать в виде:
э
1
A
=
A
R
exp
−2
α
+α
x
−
2
α
x
−
x
(8)
d
и
d
(
R
S
)
d
Sr
(
d
p
)
x
d
На расстояниях, не превышающих величину ближней зоны преобразователя, для которой
b
)
1,
d
x
=
амплитуда эхосигнала принимает вид:
э
A
=
AR
exp
−2(
α
+α
)
x
−2α
x
−
x
.
(9)
d
и
d
R
S
d
Sr
(
d
p
При практическом контроле настройка чувствительности выполняется по эхо-сигналу от эта-
лонного отражателя, в качестве которого для поверхностных волн принято использовать прямой
двугранный угол в образце из контролируемого материала [13]. Положим, что расстояние от точки
возбуждения—приема поверхностных волн до эталонного отражателя выбрано минимальным,
достаточным для раздельного наблюдения и измерения зондирующего и отраженного импульсов.
В таком случае влияние затухания поверхностных волн практически отсутствует даже в случае
контакта поверхности с жидкостью — Ψ =1. Для оценки возможного влияния контакта с жидко-
стью на коэффициент отражения поверхностной волны от прямого двугранного угла (Rinf) прове-
ден эксперимент, который не показал значимого изменения амплитуды эхосигнала от прямого
двугранного угла при погружении образца в воду. В связи с этим (Rinf) принят равным значению,
полученному для рэлеевской волны [11], и амплитуда A0 опорного эхосигнала от эталонного отра-
жателя равна:
A0 = 0,67Aи.
(10)
В результате с учетом [7] для коэффициента выявляемости дефекта, расположенного в ближ-
ней зоне поля преобразователя, получим:
э
3
K
=
R
exp
−
2
(
α
+α
)
x
−2α
(
x
−
x
)
(11)
d
d
R
S
d
Sr
d
p
2
Полученное общее выражение может быть использовано для детального анализа акустическо-
го тракта эхо-импульсного иммерсионного контроля поверхностными волнами.
Для модели дефекта в виде прямоугольной канавки его следует дополнить формулами для Rd
из [11].
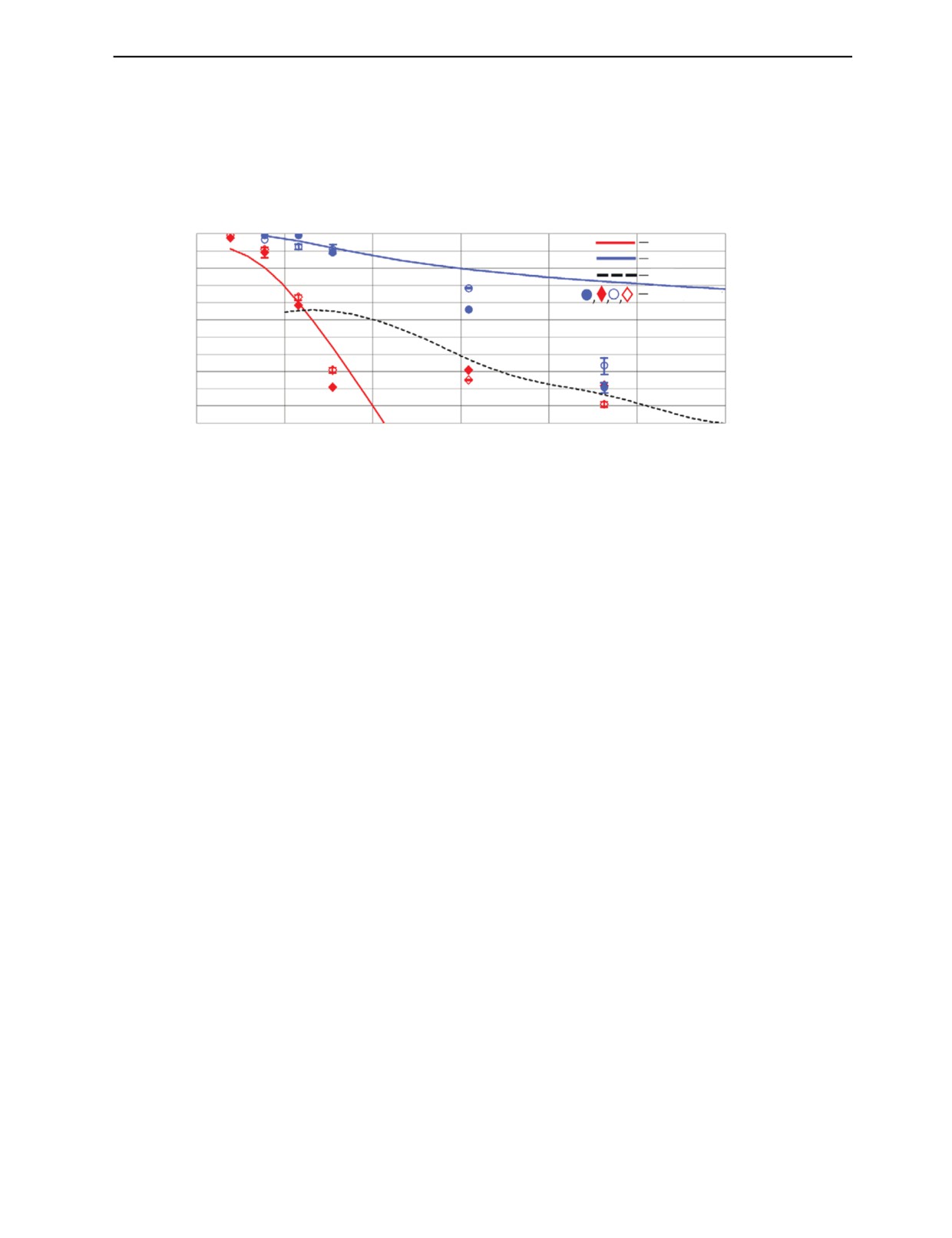
Данные расчетов и экспериментальные значения коэффициента выявляемости прямоугольной и
полуцилиндрической канавок на плоской поверхности в воздухе и в воде представлены на рис. 7.
Наблюдается удовлетворительное качественное и количественное совпадение результатов
выполненных в работе экспериментов с теоретическими и опытными данными других авторов
Kdэ, дБ
0
-4
-8
-12
-16
-20
(11) [9]
-24
(11) [10]
эксперимент
-28
-32
h
h
d
d
-36
0
0,2
0,4
0,6
0,8
1
1,2
λ λ
R
Рис. 7. Коэффициенты выявляемости узкой (sd/λ → 0) прямоугольной (♦, ◊) и полуцилиндрической (sd/λ ≈ 5) (●, ○)
канавок глубиной hd при эхометоде контроля поверхностными волнами: ◊, ○ — сталь—воздух; ♦, ● — сталь—вода.
Дефектоскопия
№ 8
2022
Иммерсионный контроль объектов криволинейного профиля...
33
[9, 11]. При этом отсутствие осцилляций на расчетной кривой для прямоугольной канавки объ-
ясняется, как и для теневого метода, использованным в [11] энергетическим приближением.
Из рис. 7 видно, что коэффициенты выявляемости для вариантов контроля на воздухе и в
иммерсионной среде отличаются незначительно; выявляемость полуцилиндрической канавки эхо-
методом близка к выявляемости прямоугольной канавки при глубинах от длины волны и более;
приемлемые для практики значения коэффициентов выявляемости обеспечиваются для трещино-
подобных дефектов глубиной более 0,2λ и дефектов с гладким профилем глубиной более 0,6λ.
Влияние ширины гладкого дефекта на его выявляемость иллюстрируется данными, представ-
ленными на рис. 8. Как видно, и при эхо-импульсном, и амплитудном теневом методах критически
снижается выявляемость полуцилиндрических канавок, ширина которых превышает глубину на
порядок и более.
Kd, дБ
0
-4
-8
теневой
-12
эхо
-16
-20
-24
sd
-28
0
5
10
15
20
25
30
35
h
d
Рис. 8. Зависимость коэффициентов выявляемости при эхо- и теневом методах от относительной ширины полуцилин-
дрической канавки.
На основе выполненных исследований иммерсионного ультразвукового контроля поверхност-
ными волнами:
обоснована возможность применения эхоимпульсного, а также амплитудного и временного вари-
антов теневого методов для иммерсионного контроля поверхностными волнами плоских и криволи-
нейных (выпуклых и вогнутых) поверхностей изделий сложной формы поперечного сечения;
разработана методика комплексного применения методов и обоснованы требования к оборудова-
нию иммерсионного ультразвукового контроля поверхностными волнами для выявления дефектов с
гладким профилем и трещиноподобных поверхностных дефектов глубиной в доли длины волны;
создана установка NORDINSCAN-RAIL-S (рис. 9) компания «Нординкрафт») для автоматиче-
ского иммерсионного ультразвукового контроля качества поверхности рельса, включающая много-
Рис. 9. Общий вид установки ультразвукового контроля качества поверхности рельса NORDINSCAN-RAIL-S (компания
«Нординкрафт») в линии приемочного контроля рельсов металлургического предприятия.
Дефектоскопия
№ 8
2022
34
Г.Я. Дымкин, А.В. Кириков, К.А. Бондарчук
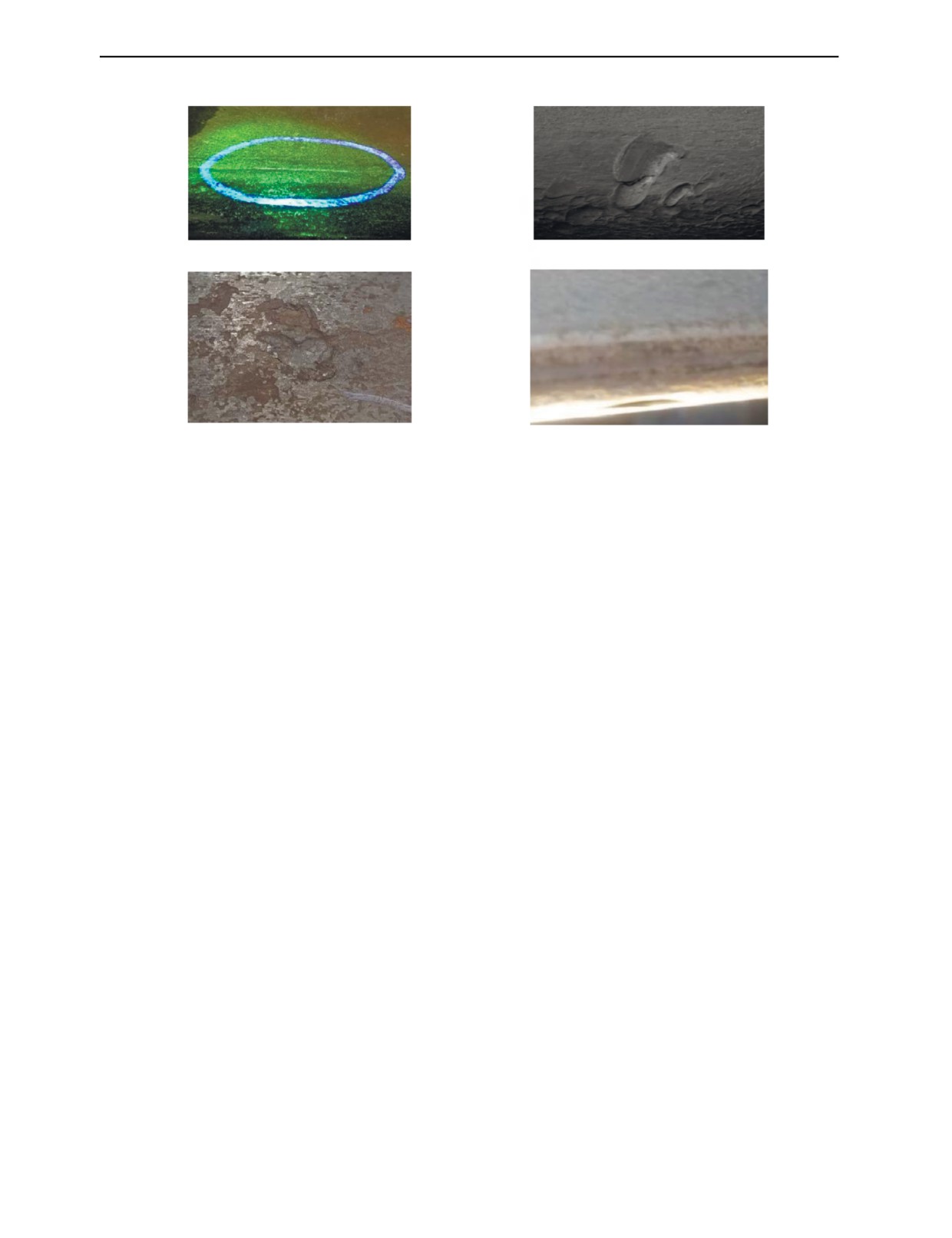
а
б
в
г
Рис. 10. Примеры недопустимых поверхностных металлургических дефектов рельсов, выявленных при иммерсион-
ном контроле поверхностными волнами: риска протяженностью 30 мм вдоль направления прокатки на поверхности
катания (а); отпечаток ~ 12×10 мм глубиной 1,0 мм на поверхности катания головки (б); плена ~ 12×17 мм глубиной
0,8 мм на подошве (в); трещина на кромке пера подошвы (г).
канальный дефектоскопический аппаратно-программный комплекс с блоками пьезоэлектрических
фазированных антенных решеток [14] и позволяющая выполнять в потоке производства приемоч-
ный контроль железнодорожных рельсов и рельсового проката всех типов с целью выявления
дефектов по всему периметру поверхности (в том числе в зонах, недоступных для вихретокового
контроля).
На рис. 10 приведены примеры реальных дефектов (трещин, отпечатков, плен, раковин, рисок),
выявленных с использованием описанной в статье методики и оборудования.
ВЫВОДЫ
Результаты представленных в статье исследований и их реализация при создании оборудова-
ния и технологии ультразвукового контроля рельсов с целью выявления поверхностных дефектов:
сформировали методическую основу комплексного применения эхо-импульсного метода
совместно с амплитудным и временным вариантами теневого метода иммерсионного контроля
поверхностными волнами;
показали высокую чувствительность, повышенную помехозащищенность и дополнительные
возможности контроля криволинейных поверхностей изделий сложной формы с использованием
иммерсионной технологии применения поверхностных ультразвуковых волн;
расширили возможности применения ультразвуковых поверхностных волн для задач дефекто-
скопии при подводном положении объекта контроля и в иммерсионных технологиях.
СПИСОК ЛИТЕРАТУРЫ
1. Полупан А.В. Ультразвуковой контроль поверхностными волнами. М.: Спектр, 2014. 120 с.
2. Жостков Р.А. Восстановление неоднородностей среды при микросейсмическом зондировании
вдоль криволинейной поверхности // Акустический журн. 2019. Т. 65. № 5. С. 708—720.
3. Баев А.Р., Пантелеенко Ф.И., Захаренко В.В., Размыслович Г.И., Жаворонков К.Г., Гиль Н.Н.
Трансформация и рассеяние поверхностных волн на акустической нагрузке для ультразвукового кон-
троля и измерений. Ч. 1. Скользящая граница акустического контакта // Приборы и методы измерений.
2018. Т. 9. № 1. С. 18—39.
4. Викторов И.А. Волны типа рэлеевских на цилиндрических поверхностях // Акустический журн.
1958. № 2. С. 131—136.
5. Викторов И.А., Грищенко Е.К., Каёкина Т.М. Исследование распространения ультразвуковых
поверхностных волн на границе твердого тела с жидкостью // Акустический журн. 1963. № 2. С. 162—170.
Дефектоскопия
№ 8
2022
Иммерсионный контроль объектов криволинейного профиля...
35
6. Викторов И.А. К расчету фазовых скоростей поверхностных волн на границе твердого полупро-
странства с жидким слоем // Акустический журн. 1977. № 6. С. 947—948.
7. Никифоров Л.А., Харитонов А.В. Возбуждение поверхностной волны ультразвуковым пучком на
границе раздела жидкость—твердая среда // Дефектоскопия. 1973. № 3. С. 45—53.
8. Викторов И.А. , Зубова О.М. О диаграммах направленности излучателей волн Лэмба и Рэлея //
Акустический журн. 1963. № 2. С. 171—175.
9. Викторов И.А. О влиянии несовершенств поверхности на распространение рэлеевских волн //
ДАН СССР. 1958. Т. 119. № 3. С. 463—465.
10. Жарылкапов С.Ж., Крылов В.В. Рассеяние волн Рэлея на выемке произвольной глубины //
Акустический журн. 1987. № 5. С. 878—883.
11. Данилов В.Н., Ямщиков В.С. К вопросу о рассеянии поверхностных волн Рэлея на пограничных
дефектах // Акустический журн. 1985. № 3. С. 323—327.
12. Ахромеева И.Д., Крылов В.В. Преобразование волн Рэлея в объемные на локальных дефектах
поверхности // Акустический журн. 1977. № 4. С. 510—516.
13. Дамаскин А.Л., Дымкин Г.Я., Костюк О.М. Исследование акустического тракта при эхо-
импульсном контроле поверхностными волнами // Дефектоскопия. 1991. № 2. С. 26—30.
14. Кириков А.В., Дымкин Г.Я. Устройство для иммерсионного ультразвукового контроля / Патент
на изобретение № 2723913 от 21.02.2020 г.
Дефектоскопия
№ 8
2022