Общие вопросы дефектоскопии
УДК 620.179.1
МЕТОДИКА ВЫЯВЛЕНИЯ ВМЯТИН НА ДОРОЖКАХ ПОДШИПНИКОВ
КАЧЕНИЯ НА ОСНОВЕ СВЕРТОЧНОЙ НЕЙРОННОЙ СЕТИ
С ДВУМЕРНЫМ ОТОБРАЖЕНИЕМ
© 2022 г. Чжэн Юа1,*, Му Лунтао1, Чжао Цзюньхао1
1Шэньсийский политехнический институт, Сяньян, Китай
E-mail: *zhengyu169@126.com
Поступила в редакцию 03.08.2022; после доработки 30.09.2022
Принята к публикации 30.09.2022
Для реализации методики выявления незначительных повреждений (вмятин) на дорожках подшипников качения
были выбраны сверточные нейронные сети (СНС). Чтобы улучшить обучение СНС, для преобразования сигналов ви-
брации подшипника из изображения в одномерный временной ряд были проанализированы такие алгоритмы преоб-
разования двухмерных изображений, как поля угловой суммы или разности Грамиана, частотно-временная диаграмма
вейвлета, матрица перехода Маркова. Чтобы уменьшить объем аппаратных вычислений и сократить время обучения и
валидации было использовано кусочно-постоянное представление (КПП) для максимального сжатия данных с сохране-
нием всей информации о сигнале. Также добавляется слой пакетной нормализации для избежания проблемы насыщения
градиента функции ReLU, а для преодоления нестабильности стохастического градиентного спуска с импульсом (СГСИ)
при разработке СНС применяют метод минипакетов. Каждый вид изображений используется в качестве обучающей вы-
борки, а результаты показывают, что как частотно-временная диаграмма вейвлета, так и диаграмма полей угловой суммы
или разности Грамиана могут лучше определять состояние дефекта, причем частотно-временная диаграмма вейвлета
была относительно лучше. При сравнении с различными рекуррентными нейросетевыми (РНС) моделями диагностики
была доказана обоснованность модели. В то же время модель применяется для идентификации деградации характери-
стик неисправных деталей, а результаты показывают, что модель может эффективно идентифицировать деградацию вну-
треннего кольца, наружного кольца и тела качения, а точность для внутреннего кольца и наружного была выше. Данная
статья предлагает новую методику выявления вмятин на дорожках подшипников качения.
Ключевые слова: СНС, двумерное изображение, КПП, подшипник качения, диагностика незначительных дефектов.
DOI: 10.31857/S0130308223010074, EDN: BWBKMN
1. ВВЕДЕНИЕ
Подшипники качения являются важной основной частью вращающихся механизмов [1] и ча-
сто играют важную вспомогательную роль в основном оборудовании [2]. Состояние подшипников
качения часто определяет, может ли механизм работать нормально [3, 4]. Поэтому для своевремен-
ного обнаружения или предупреждения возможных неисправностей необходимо использовать эф-
фективный метод мониторинга состояния подшипников качения1 [5]. Это имеет большое значение
для обеспечения надежности работы и снижения затрат на техническое обслуживание [6].
В смежных исследованиях Xiaochi L. и др. [7] предложили метод контроля повреждений под-
шипников2, сочетающий алгоритм оптимизации серых волков (ОСВ), нелокальное среднее шумо-
подавление (НСШ) и полностью адаптированное для шумоподавления разложение на эмпириче-
ские моды. Zihao L. и др. [8] описали интеллектуальный метод контроля подшипников качения,
основанный на многомасштабном механизме извлечении признаков в смешанной области и домен-
ной адаптации. Xiaojuan L. и др. [9] рассмотрели проблемы потери информации и неправильной
работы при извлечении признаков из вибрационных сигналов неисправных подшипников. В статье
исследовали гибридный интеллектуальный метод выявления неисправностей машин, основанный
на теории вероятностей и улучшенном алгоритме оптимизации серых волков (ОСВ) для оптими-
зации машины опорных векторов (МОП). Ming W. и др. [10] предложили метод контроля повреж-
дений подшипников качения, основанный на улучшенном разложении по динамическим модам
(РДМ). Однако традиционный метод контроля, основанный на фильтрации и подавлении шума,
2 Повреждение — нарушение целостности деталей подшипника вследствие воздействия циклических нагрузок в
процессе его работы, монтажа, демонтажа, транспортировки и хранения. Вмятина — результат вдавливания твердых
частиц отслаивающегося металла в результате образования контактно-усталостных повреждений или попадания в смаз-
ку подшипника инородных твердых тел, а также длительного действия на подшипник, находящегося в состоянии покоя,
нагрузок пульсирующего характера, приводящих к образованию на дорожках качения колец отпечатков от роликов,
называемых «ложным бринеллированием».
64
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
производит чрезмерное разложение сигналов от незначительных повреждений, что сокращает по-
лезную информацию и не способствует точной диагностике. В то же время сигналы вибрации
подшипника содержат большое количество нелинейных компонентов, пригодность обычных алго-
ритмов классификации, таких как МОП, не очень хороша.
В связи с вышеуказанными причинами, сверточная нейронная сеть (СНС) обладает хорошей
адаптивностью в классификации данных. Tianlong G. и др. [11] непосредственно вводили данные о
вибрации подшипника в многомасштабную СНС для диагностирования, но параметры извлечения
признаков СНС имеют более очевидные преимущества в высокоразмерных данных [12]. Jiangtao J. и
др. [13] описали метод интеллектуального контроля ХСНС (Хаотическая СНС)-ДКП-ОМОВ. Однако
этот метод не только имеет комплекс последовательности действий, низкую скорость идентифика-
ции неисправностей, но и может иметь долгосрочную зависимость от блоков долгой кратковремен-
ной памяти. Xiaoxia Y. и др. [14] реализовали контроль повреждений корпуса подшипников на осно-
ве адаптивных графовых сверточных нейросетей (АГСНС), основанных на матричной диаграмме,
определяемой по коэффициенту вейвлет-пакета сигнала вибрации корпуса авиадвигателя. Но сигнал
вибрации подшипника не был прямо использован, что привело к относительно большому расхожде-
нию результатов контроля.
Исходные сигналы вибрации подшипников имеют множество временных характеристик, а со-
держащаяся в них исходная информация имеет большое значение для осуществления достовер-
ного контроля. Поэтому при выборе СНС в качестве метода обработки информации необходимо
максимально использовать исходную информацию, содержащуюся в сигнале. Во-вторых, прямое
использование исходных вибрационных сигналов для обучения неизбежно приведет к слишком
большой нагрузке на компьютерное оборудование и слишком большому времени обучения, для
этого необходимо максимально сократить время обучения, сохранив при этом общую информацию
о сигнале. Наконец, метод контроля должен в полной мере использовать способность СНС к рас-
познаванию абстрактных признаков для эффективной идентификации различных незначительных
повреждений.
В заключение, используя алгоритм кусочно-постоянного представления (КПП), уменьшается
размерность сигналов вибрации подшипников. Одномерные сигналы вибрации преобразуются в
двумерные изображения с помощью различных алгоритмов для получения обучающих образцов.
Затем разрабатывается СНС, и образцы изображений используются для обучения сети. Наконец,
реализована эффективная методика контроля различных незначительных повреждений.
2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
Метод генерации двумерных изображений
Угловые поля Грамиана
Угловые поля Грамиана (УПГ) могут преобразовывать одномерные временные ряды в двумер-
ные графики [15, 16]. Принцип преобразования и формула приводятся в уравнениях (1)—(3):
(
x
−max
(
X
))+(
x
−min
(
X
))
i
i
=
,
i
max
(
X
)
−min
(
X
)
(1)
i
=1,2,
,n,
∈
[
−1,1
]
,
i
где X={x1, x2, …, xn}
— нормализованные элементы одномер-
ного временного ряда.
ϕ = arccos(
);
i
i
(2)
t
i
r
=
,
i
n
x в полярных координатах; ri — радиус в полярных координатах; ti — вре-
менная метка, соответствующая xi; n — коэффициент нормализации, показывающий общее число
точек в одномерном временном ряде X.
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
65
cos
(
ϕ
+ϕ
)
cos
(
ϕ
+ϕ
)
1
2
1
n
cos
(
ϕ
+ϕ
)
cos
(
ϕ
+ϕ
)
2
1
2
n
GASF
=
;
cos
(
ϕ
+ϕ
)
cos
(
ϕ
+ϕ
)
n
1
n
n
(3)
cos
(
ϕ
1
−ϕ
2
)
cos
(
ϕ
1
−ϕ
n
)
cos
(
ϕ
−ϕ
)
cos
(
ϕ
−ϕ
)
2
1
2
n
GADF
=
,
cos
(
ϕ
−ϕ
)
cos
(
ϕ
−ϕ
)
n
1
n
n
где GASF — поля угловой суммы Грамиана (ПУСГ); GADF — поля угловой разности Грамиана
(ПУРГ).
ПУРГ
1
1000
0,5
Одномерный временной ряд
В полярных координатах
2000
0
2
3000
-0,5
1
4000
-1
1000 2000 3000 4000
0
Размерность 1
ПУСГ
-1
1
1000
0,5
-2
0
0,1
0,2
0,3
0,4
2000
0
Время t, с
3000
-0,5
4000
-1
1000 2000 3000 4000
Размерность 1
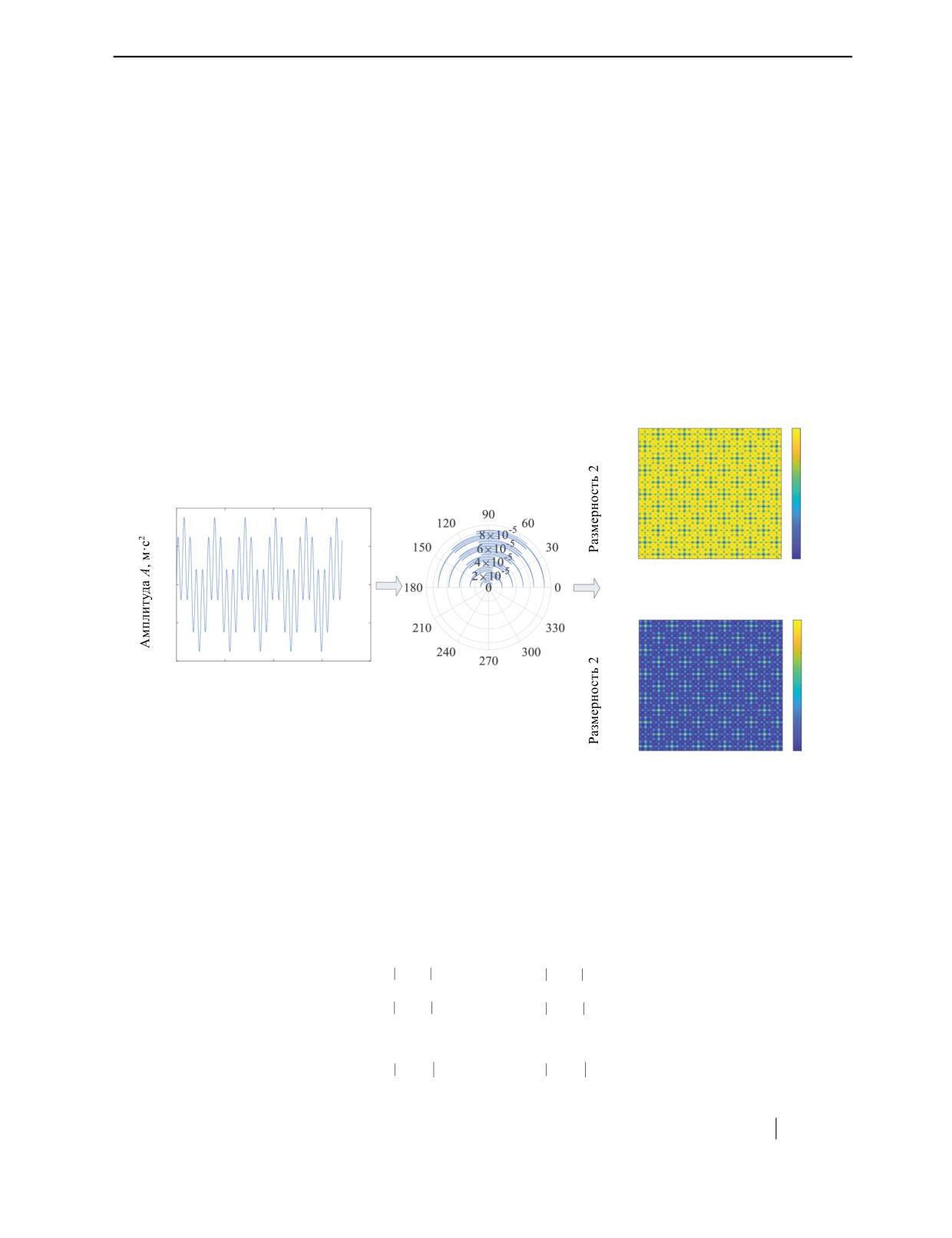
Рис. 1. УПГ-преобразование одномерного сигнала.
Матрица перехода Маркова
Матрица перехода Маркова (МПМ) кодирует информацию о динамическом переходе через ве-
роятность марковского перехода. Формула выглядит следующим образом (см. уравнения (4), (5)):
ω
ω
11P
(
x
t
∈
q
1
x
t−1
∈q
1
)
1QP
(
x
t
∈q
1
x
t−1
∈q
Q
)
ω
ω
21P
(
x
t
∈
q
2
x
t−1
∈q
1
)
2QP
(
x
t
∈q
2
x
t−1
∈q
Q
)
W
=
,
(4)
ω
ω
Q1P
(
x
t
∈
q
Q
x
t−
1
∈
q
1
)
QQ P
(
x
t
∈q
Q
x
t−
1
∈
q
Q
)
где W — это матрица перехода Маркова; xt — данные по временным меткам t в одномер-
ном временному ряду X; ωij — частота квантиля qi после квантиля qj;
ω
ij
=
P
(
x
t
∈q
i
x
t−1
∈q
j
)
;
Дефектоскопия
№ 1
2023
66
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
qj(j∈[1, Q]) — квантиль; Q — квантильный критерий, распределенный в соответствии с диа-
пазоном значений одномерного временного ряда X.
Матрица перехода Маркова M строится путем расширения матрицы W при упорядочивании
каждой вероятности во временном порядке:
m
m
ij x
1
∈q
i
,x
1
∈q
j
ij x
1
∈q
i
,x
n
∈q
j
m
m
ij x
2
∈q
i
,x
1
∈q
j
ij x
2
∈q
i
,x
n
∈q
j
W
=
,
(5)
m
m
ij x
∈q
,x
∈q
ij x
∈q
,x ∈q
n i
1
j
n i n
j
где mij — вероятность перехода из квантиля qi в квантиль qj;
m
=P
(
q
→q
)
ij
i
j
МПМ
Одномерный временной ряд
0
2
0,8
1000
1
0,6
2000
0
0,4
-1
3000
0,2
–2
4000
0
0
0,1
0,2
0,3
0,4
0
1000
2000
3000
4000
Время t, с
Размерность 1
Матрица перехода Маркова
Рис. 2. МПМ-преобразование одномерного сигнала.
Частотно-временная диаграмма вейвлета
Вейвлет-преобразование — средство для частотно-временного анализа сигналов, которым мо-
жет проводиться обработка сигнала на различных масштабах или разрешениях [18]. Комплексная
матрица коэффициентов, полученная из исходного сигнала путем непрерывного вейвлет-преобра-
зования, — это частотно-временная диаграмма вейвлет-преобразования. На рис. 3 показан пример
такой диаграммы.
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
67
6000
0,4
0,35
5000
0,3
4000
0,25
3000
0,2
0,15
2000
0,1
1000
0,05
0
0
0
0,01
0,02
0,03
0,04
Время t, с
Рис. 3. Частотно-временная диаграмма вейвлета.
СНС
СНС — это разновидность нейронной сети прямого распространения, которая включает в себя
сверточные вычисления [19]. Типичные СНС обычно включают сверточные слои, слои функций
активации, объединяющие слои и полносвязные слои. Сверточный слой используется для извлече-
ния характеристик данных, и его математическое выражение выглядит следующим образом [20]:
n
n−1
n
n
x
=
f
x
ω
+b
,
(6)
j
(
∑
(
i
ij
)
j
)
гдеxnj — j-карта признаков n-го слоя;xn-1j — i-карта признаков предыдущих слоев;ωnij — матрица
весов на n-м уровне;bnj — соответствующее смещение; f () — функция активации.
Объединяющий слой обычно использутся для фильтрации информации и уменьшения пара-
метров, участвующих в вычислении в массиве, чтобы предотвратить переобучение. Формула для
расчета:
n
n
n−1
n
n
x
=
f
β
down
x
,
M
+b
,
(7)
j
(
j
(
j
)
j
)
гдеβnj — вес номера j-карты признаков с n слоями; down() — объединяющая функция, включаю-
щая максимальное значение, среднее значение и случайное значение; Mn — номер n слоя, который
принимает окно свертки, а размер поля свертки Mn× Mn.
Кусочно-постоянное представление
Кусочно-постоянное представление (КПП) — метод восстановления данных исходных времен-
ных рядов, используя те же ряды данных разрешения по времени [21], который имеет хороший эф-
фект снижения размерности данных для большинства одномерных временных рядов. КПП-метод
рассчитывается по уравнению [22]:
k
*
j
1
x
=
x
,
(8)
j
∑
i
k =k(
j−1)+
1
где xi — исходный временной ряд длиной k · j;xj — временной ряд после усреднения; j — длина.
Из этого уравнения можно получить временные ряды после усреднения, главная идея КПП — ку-
сочно усреднить одномерный временной ряд так, чтобы уменьшить размерность данных и сокра-
тить их длину, максимально сохранив общую информацию о ряде.
Рис. 4 показывает угловые поля Грамиана без уменьшения разрешения (512×512×1) и после его
уменьшения (64×64×1).
Дефектоскопия
№ 1
2023
68
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
а
б
64
512
Рис. 4. Результат уменьшения размеров методом КПП: без КПП (a); после КПП (б).
Как видно из рис. 4, после уменьшения разрешения по КПП-алгоритму размер карты угловых
полей Грамиана значительно уменьшается. Между тем, полученная карта угловых полей имеет
сходство в общих чертах, а в ней сохраняются характеристики изображения.
Метод диагностики
В соответствии с приведенными выше методами преобразования, в данной статье предлагается
модель диагностики изображений методом КПП с помощью СНС, как показано на рис. 5.
n×n×1
УПГ/МПМ/
Слой пакетной
Сверточный
Слой пакетной
Слой
Сверточный
Слой
частотно-
нормализации
слой 1
нормализации 1объединения 1
слой n-1
объединения
временная
n-1
n-1
диаграмма
Вмятина 1
вейвлета
Вмятина 2
Вмятина 3
Одномерный
Одномерный
Сверточный
Слой
вибрационный
Слой
вибрационный
Вмятина 4
слой n
пакетной
сигнал после
объединения
сигнал
Полносвязный
нормализации
КПП-сжатия
n
слой
n
Рис. 5. Модель диагностики изображений методом КПП с помощью СНС.
В данной модели одномерные вибрационные сигналы от подшипников сначала сжимаются по
КПП-алгоритму, а затем создаются изображения после расчета УПГ или МПМ, или частотно-вре-
менной диаграммы вейвлета.
Операция свертки сначала выполняется через слой свертки для изучения локальных признаков
входного изображения, после чего образец изображения вводится в СНС. Чтобы преодолеть про-
блему насыщения градиента функции активации, после слоя функции активации был введен слой
пакетной нормализации [23] для нормализации входных данных функции активации к области с
большим значением градиента. Через объединяющий слой карта входных признаков уменьшается
для удаления избыточной информации. После нескольких циклов свертки, пакетной нормализации
и операций объединения модель завершает обучение на основе признаков. Наконец, полученная
информация о признаках, включая пространственные и временные особенности исходного изобра-
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
69
жения, вводится в полносвязный слой для повторной интеграции, точной настройки параметров и
отображения в пространство меток образца. Для классификации множества повреждений исполь-
зуется функция softmax [24], математическое выражение которой выглядит следующим образом:
z
i
z
i
e
e
y
=
f
(
z
)
=
=
,
i
i
z
1
z2
z
M
M
e
+e
+⋅⋅⋅+ e
(9)
ezj
∑
j =1
где zi — вход для i-го выходного нейрона; M — общее число выходных нейронов; f — функция
активации Softmax, а f(z1) + f(z2) + … + f(zM) = 1.
Чтобы ускорить весовое обучение, в качестве метода обучения в данной работе используется
стохастический градиентный спуск с импульсом (СГСИ) [25]. Поскольку СГСИ склонен к неста-
бильности вычислений из-за различий в выборке, что не способствует получению хороших резуль-
татов классификации, в работе используется метод минипакетов [26], а именно: из набора данных
выбираются некоторые подмножества данных. Эти выбранные подмножества данных используют-
ся для расчета обновленного значения параметров сети, а затем среднее значение обновленных па-
раметров применяют для настройки параметров всей сети, чтобы учесть стабильность и скорость
обновления веса. В качестве функции потерь мы используем перекрестную энтропию, формула
которой выглядит следующим образом:
m
1
j
j
H
=−
p
logq
,
(10)
∑∑
k
k
m
k
=1
j
где m — число элементов в минипакете; k — элемент с номером k в минипакете; j — целевой класс
с номером j;pjk — это унитарный вектор, который представляет истинную вероятность того, что
элемент с номером k попадет в целевой класс j в минипакете;qjk — вектор выходной вероятности
функции softmax для элемента с номером k в целевом классе j.
3. ОБРАЗЦЫ И ЭКСПЕРИМЕНТ
Источники данных и образцы
В качестве экспериментальных данных используются полученные в Университете Кейс Ве-
стерн Резерв результаты по выявлению повреждений в подшипниках. Эти данные были получены в
ходе экспериментов с радиальным шарикоподшипником (модель: 6205-2RS JEM SKF) [27]. Перед
началом эксперимента на внутреннем кольце, наружном кольце и теле качения подшипника с по-
мощью электроэрозионного станка были сделаны искусственные дефекты — одиночные вмятины
разного диаметра. Диаметр и расположение вмятин показаны в табл. 1. Сигнал вибрации собира-
ется акселерометром, который размещается в зоне нагрузки посадочного места подшипника ве-
дущего конца на магнитном основании, а данные вибрации собираются 16-канальным цифровым
самописцем с частотой дискретизации 12 кГц. Экспериментальная установка показана на рис. 6.
Концевой
Подшипник
подшипник
приводной
Измеритель мощности
крыльчатки
части
Двигатель
Датчик крутящего момента/декодер
Рис. 6. Экспериментальная установка.
Дефектоскопия
№ 1
2023
70
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
Таблица
1
Диаметр и расположение отдельных лунок
Диаметр, мм
Расположение
0,1778
ВнешК, ВнутК, ТК
0,3556
ВнешК, ВнутК, ТК
0,5334
ВнешК, ВнутК, ТК
0,7112
ВнутК, ТК
ВнутК: внутреннее кольцо; ВнешК: внешнее кольцо; ТК: тело качения
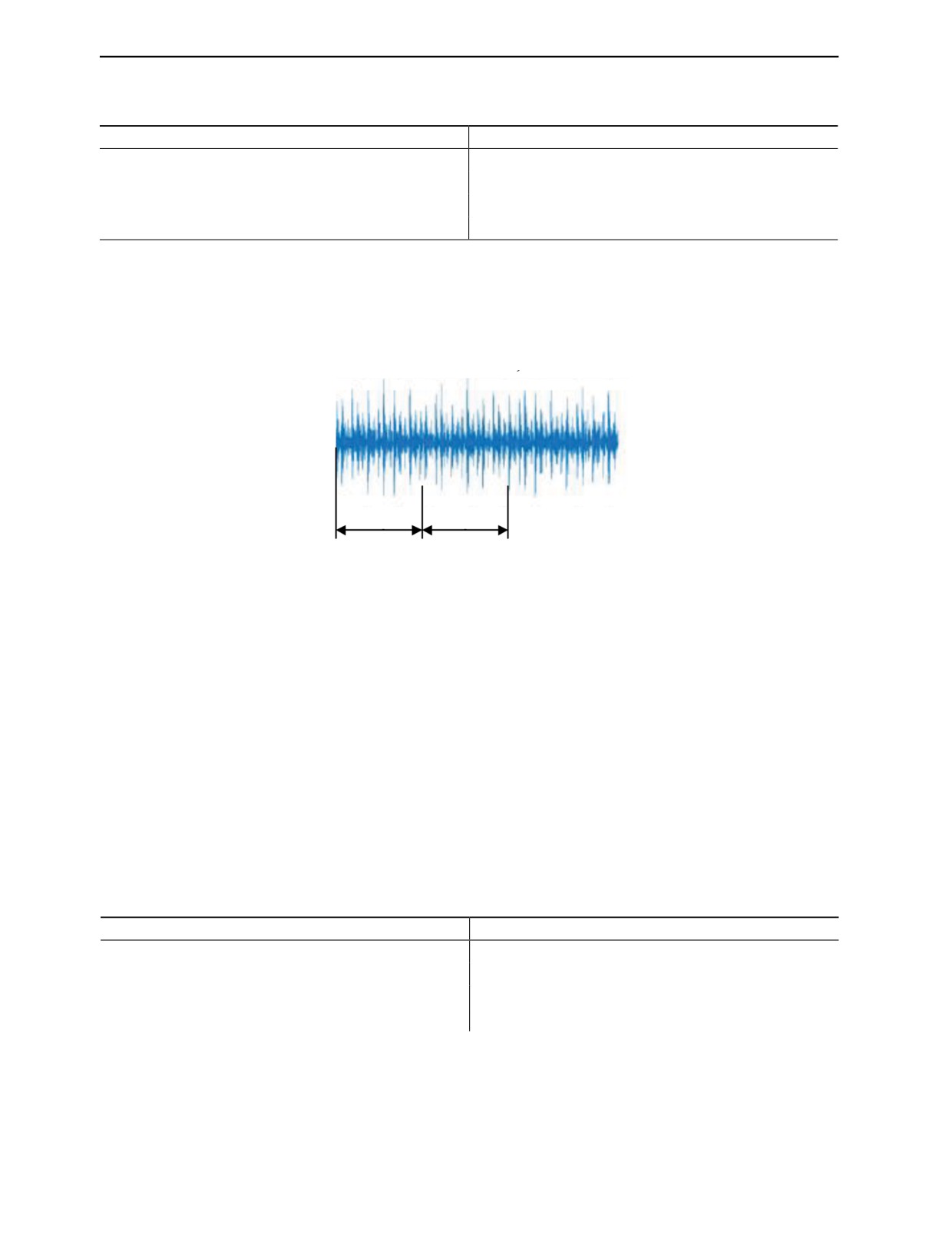
Для того, чтобы произвести обучение и верификацию сверточной нейронной сети, из исходно-
го вибрационного сигнала непрерывно извлекается определенная длина данных и разбивается на
несколько подпоследовательностей, как показано на рис. 7.
Выборка 1 Выборка 2
Рис. 7. Разбиение обучающей выборки.
Для того, чтобы уменьшить размер изображений, повысить скорость обучения нейронных се-
тей и обеспечить получение необходимой информации при считывании данных, длина подпосле-
довательности данных может быть рассчитана следующим образом:
60
n
≥
ceil
f
,
(11)
s
N
где N — скорость оборота подшипника; fs — частота дискретизации; n — длина данных выборки;
ceil — оператор округления.
Подставляя минимальную скорость вращения подшипника в ходе эксперимента, минимальное
значение n, которое можно вычислить, равно 417, поэтому длина подпоследовательности данных
определяется равной 512. Размер изображения после уменьшения размерности методом КПП со-
ставлял 64×64×1. Экспериментальные данные собраны с исправных и неисправных подшипников,
Таблица
2
Нагрузка двигателя и его обороты
Нагрузка двигателя, кВт
Обороты двигателя, об/мин
0
1797
0,74
1772
1,47
1750
2,21
1730
а типы повреждений разделены на повреждения внутреннего кольца, наружного кольца и тела ка-
чения. Подшипники с различными повреждениями находятся под воздействием четырех нагрузок
двигателя, приведенных в табл. 2. Данные были разделены на подпоследовательности, и после
уменьшения размерности с помощью КПП были созданы двумерные изображения.
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
71
Проектирование СНС
Разработанная сверточная нейронная сеть содержит в общей сложности 18 слоев, включая 1
входной слой, 3 сверточных слоя, 3 слоя пакетной нормализации, 4 слоя нелинейной активации,
3 слоя максимального объединения, 2 полносвязных слоя, 1 слой функции softmax и 1 выходной
слой. Структурные характеристики СНС представлены в табл. 3.
Таблица
3
Параметры каждого слоя сверточной нейронной сети
Наименование
Примечание
Входной слой
64×64, 1 канал
Размер ядра свертки: 5×5, количество: 32
Сверточный слой 1
Размер заполнения: 2
Слой пакетной нормализации 1
Ускоряет сходимость сети во время обучения
Слой функции активации 1
Функция ReLU
Слой максимального объединения 1
Размер объединения: 3×3, шаг: 2
Размер ядра свертки: 5×5, количество: 32
Сверточный слой 2
Размер заполнения: 2
Слой пакетной нормализации 2
Ускоряет сходимость сети во время обучения
Слой функции активации 2
Функция ReLU
Слой максимального объединения 2
Размер объединения: 3×3, шаг: 2
Размер ядра свертки: 5×5, количество: 64
Сверточный слой 3
Размер заполнения: 2
Слой пакетной нормализации 3
Ускоряет сходимость сети во время обучения
Слой функции активации 3
Функция ReLU
Слой максимального объединения 3
Размер объединения: 3×3, шаг: 2
Полносвязный слой 1
Количество выходов: 64
Слой функции активации 4
Функция ReLU
Полносвязный слой 2
Количество выходов: 4
Слой функции Softmax
Рассчитывает вероятность выхода из полносвязного слоя
Определяет класс дефекта в соответствии
Слой классификации
с определенной вероятностью
Как показано в табл. 3, в качестве нелинейной функции активации в слое функции активации
после слоя свертки в данной работе мы выбираем ReLU, так как функция ReLU имеет быструю
скорость сходимости и хорошую производительность по сравнению с другими функциями акти-
вации [22].
Количество минипакетов составляет 27, начальная скорость обучения — 0,01, коэффициент
уменьшения скорости обучения — 0,1, количество циклов уменьшения скорости обучения — 20.
Данные перетасовываются перед каждым циклом обучения или верификации, максимальное коли-
чество циклов — 100.
Набор образцов
Для того, чтобы улучшить обобщение классификации нейронной сети, различия в нагрузке
игнорируются, внимание уделяется только меткам классов повреждений. Классы образцов делятся
Дефектоскопия
№ 1
2023
72
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
на соответствующие нормальные, повреждения тела качения, повреждения внутреннего кольца и
повреждения наружного кольца.
В связи с исследованием задачи диагностики незначительных повреждений (вмятин), в ка-
честве источника данных мы выбираем данные от лунки с наименьшим диаметром 0,1778 мм.
Каждый тип образов одномерного временного ряда вибрации подшипника рассчитывается в
соответствии с вышеизложенным утверждением. Для каждого вида изображения количество
образцов в нормальном состоянии составляет 1450, количество образцов с повреждениями тела
качения — 950, количество образцов с повреждениями внутреннего кольца — 952 и количество
образцов с повреждениями внешнего кольца — 953. Набор образцов для обучения, набор об-
разцов для верификации и набор образцов для тестирования случайным образом делятся в со-
отношении 6:1:3.
4. ПРОЦЕСС И АНАЛИЗ ЭКСПЕРИМЕНТОВ
Сравнение способности к выявлению повреждений с помощью различных двухмерных
изображений
Для обучения используется следующее компьютерное оборудование: процессор I5-7500H;
ОПЕРАТИВНАЯ ПАМЯТЬ 16 ГБ; GPU 1050Ti; видеопамять 4-5 Гб. Образцы изображений каж-
дого из классов загружаются в СНС соответственно. После обучения кривая точности проверки и
кривая значения функции потерь для каждой эпохи показаны на рис. 8.
а
б
ПУРГ
1,0
6
ПУСГ
МПМ
Вейвлет
0,8
4
ПУРГ
0,6
ПУСГ
МПМ
Вейвлет
2
0,4
0,8
0
0,2
0
50
100
0
50
100
Эпоха
Эпоха
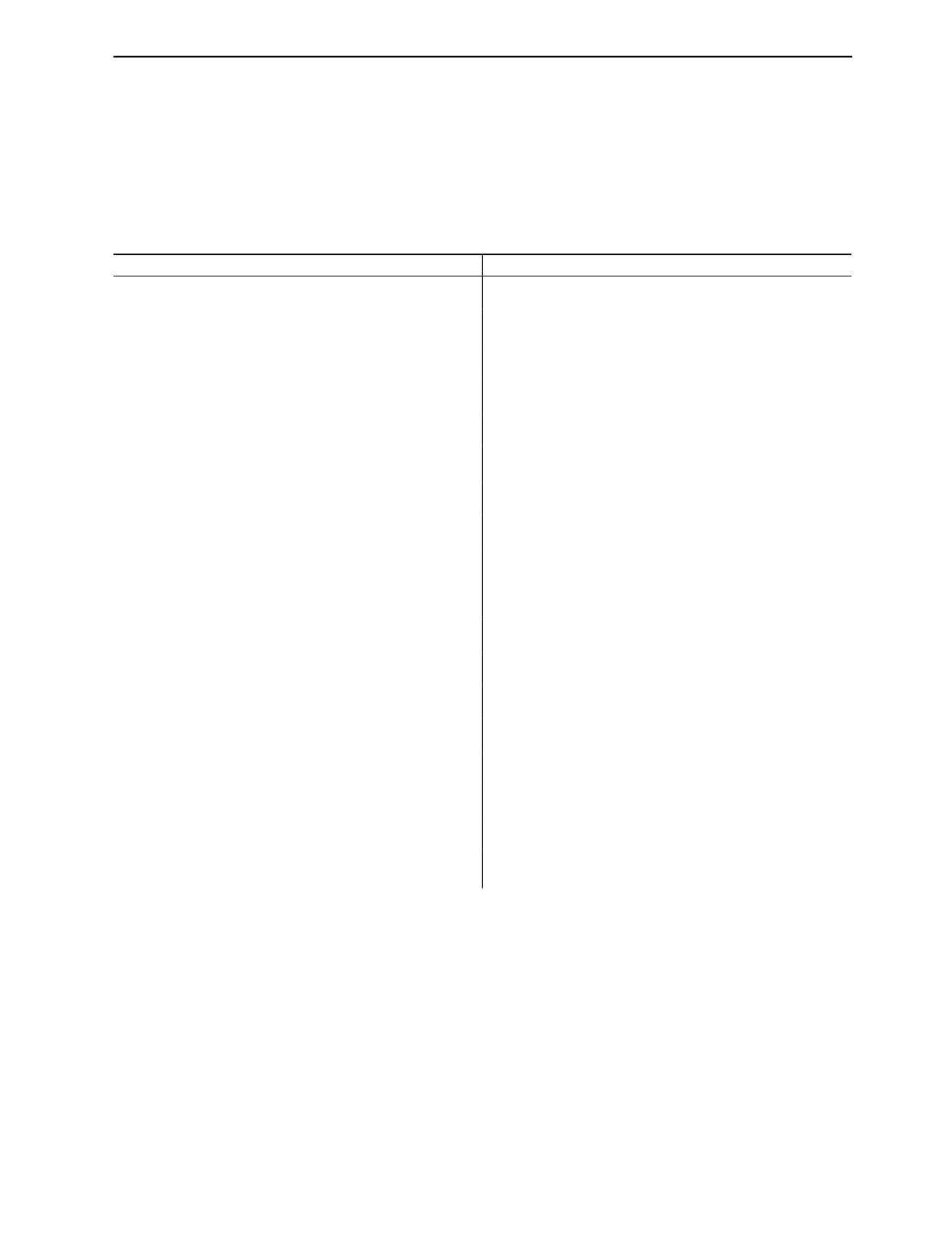
Рис. 8. Сравнение точности контроля и функции потерь для каждого двумерного изображения: определение точности
контроля (a); определение функции потерь (б).
Как можно судить из рис. 8, частотно-временная диаграмма вейвлета, ПУРГ и ПУСГ могут
увеличить достоверность контроля до значения более чем 90 % и поддерживать высокий уровень
в первых 15 эпохах обучения, в то время как точность контроля с помощью МПМ имеет низкую
скорость роста. После 100 эпох обучения точность контроля для каждого метода ПУРГ: 98,07 %;
ПУСГ 97,37 %, частотно-временная диаграмма вейвлета: 98,61 %; МПМ 77,44 %. Говоря об итого-
вой достоверности контроля, ПУРГ или ПУСГ или частотно-временная диаграмма вейвлета спо-
собны достичь значительно эффекта разрешения повреждений, в то время как МПМ хуже. Что ка-
сается значения функции потерь, ПУРГ/ПУСГ/частотно-временная диаграмма вейвлета (все три)
могут быстро уменьшиться и стабилизироваться примерно до 0,1 в течение первых 5 циклов, а
окончательная частотно-временная диаграмма вейвлета является относительно наименьшей, по-
этому, в целом, эффект диагностирования образца с использованием частотно-временной диаграм-
мы вейвлета является наилучшим. Матрица путаницы тестового набора ПУРГ, ПУСГ, частотно-
временная диаграмма вейвлета и МПМ построена так, как показано на рис. 9.
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
73
a
б
в
г
ТК
ТК
ТК
ТК
ВнутК
ВнутК
ВнутК
ВнутК
ВнешК
ВнешК
ВнешК
ВнешК
Б/Д
Б/Д
Б/Д
Б/Д
ТК ВнутК ВнешК Б/Д
ТК ВнутК ВнешК Б/Д
ТК ВнутК ВнешК Б/Д
ТК ВнутК ВнешК Б/Д
Прогнозируемый класс дефекта
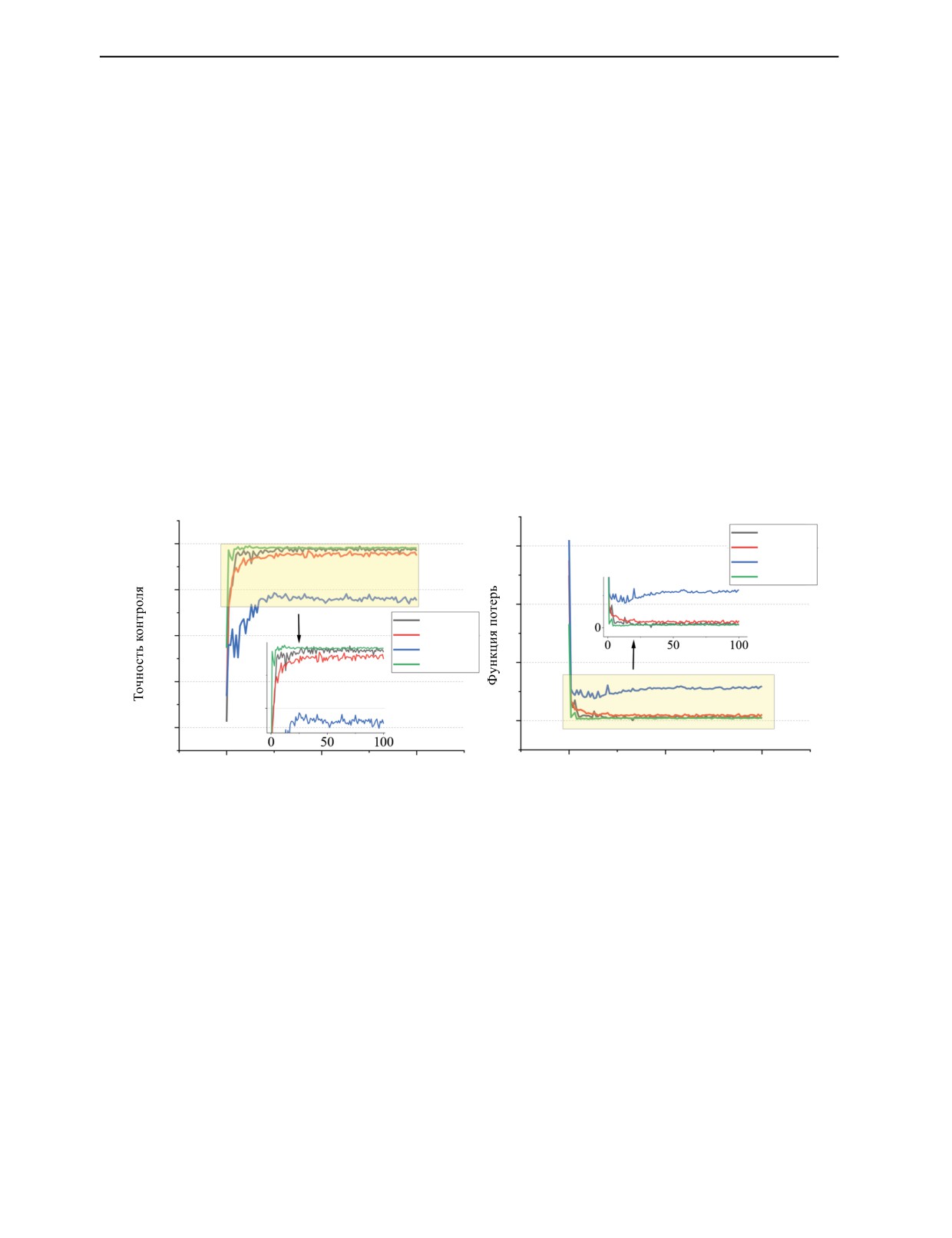
Рис. 9. Матрица путаницы для каждого набора тестовой выборки:
ПУРГ (a); ПУСГ (б); частотно-временная диаграмма вейвлета (в); МПМ (г); ВнутК — внутреннее кольцо; ВнешК — внешнее кольцо;
ТК — тело качения; Б/Д — бездефектный.
Как видно из рис. 9, независимо от типа выборки ошибка контроля в основном возникает при
повреждении тела качения, что указывает на то, что повреждение тела качения трудно выявлять,
это может быть связано со сложными компонентами сигнала при повреждении тела качения.
Сравнение с другими моделями
Чтобы доказать эффективность этой модели, ее сравнивают с другими распространенными мо-
делями машинного обучения. В качестве моделей сравнения используются ДКП, 2H-ДКП и УКБ.
С точки зрения структуры сети, каждая в своей основе содержит скрытый слой с числом нейронов
100, размер минипакета 27, число эпох обучения 100, а скорость первичного обучения 0,01. За
исключением модели СНС в данной работе все остальные сопоставляемые модели проверяются
на одномерных выборках данных вибрации подшипников без снижения размерности PAA, длина
которых делится на 512 при том же наборе данных. Кривые точности обучения соответствующих
моделей показаны на рис. 10, а количество параметров, время обучения и сравнение точности по-
казаны в табл. 4.
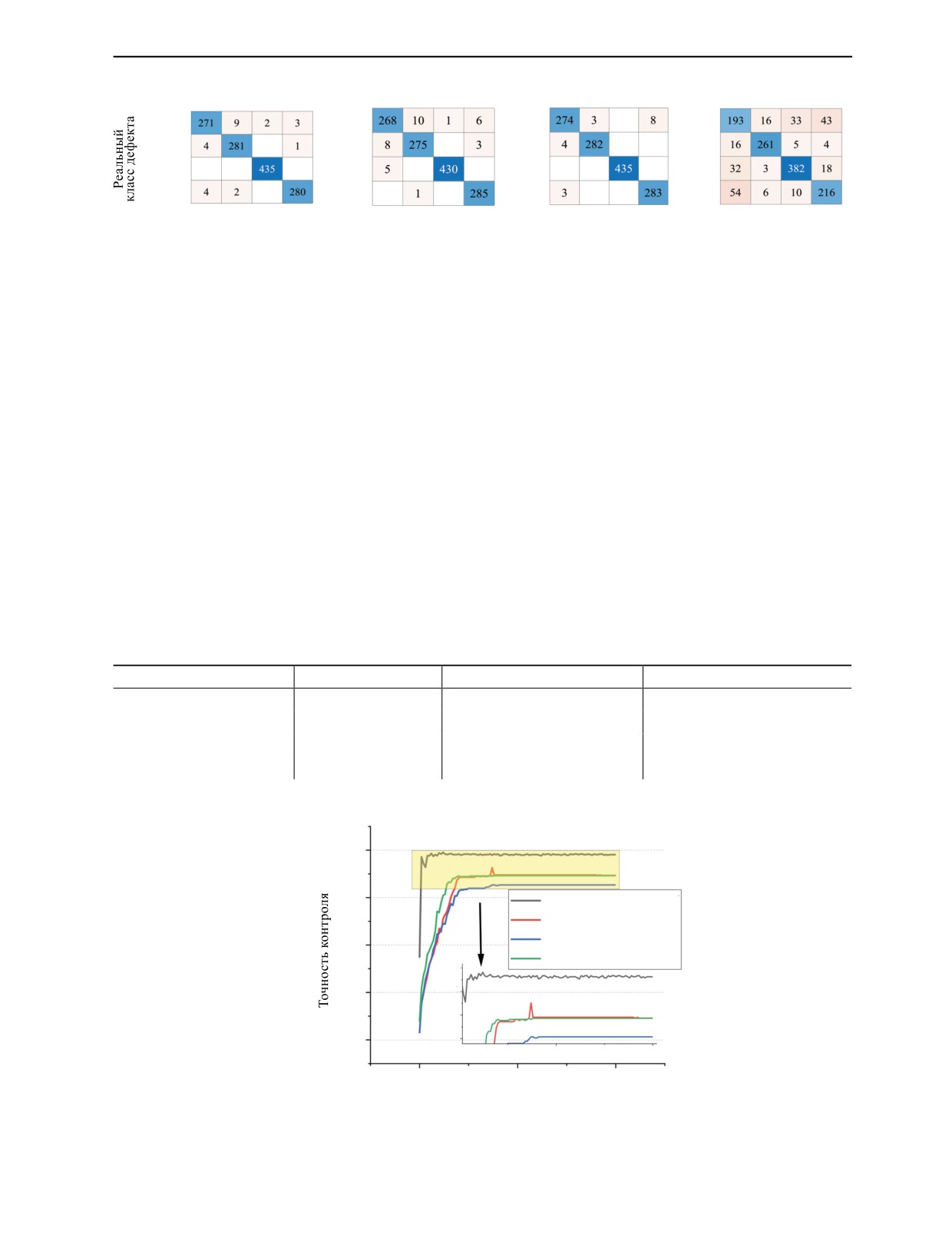
Таблица
4
Сравнение эффективностей различных моделей машинного обучения
Модель
Точность контроля
Количество параметров
Время обучения
Вейвлет-КПП-СНС
0,9861
257412
7 мин 58 с
ДКП
0,8854
245604
2 мин 38 с
2Н-ДКП
0,8429
491204
3 мин 15 с
УРБ
0,8932
184304
2 мин 31 с
1,0
0,8
Вейвлет-КПП-СНС
ДКП
2Н-ДКП
0,6
УРБ
1,00
0,4
0,95
0,90
0,2
0,85
50
100
0
50
100
Эпоха
Рис. 10. Сравнение точности контроля каждой модели.
Дефектоскопия
№ 1
2023
74
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
Как видно из рис. 10, достоверность предложенного метода увеличивается быстрее всего, и
в конечном итоге она может быть стабилизирована на более высоком уровне. Из табл. 4. следует,
что количество параметров обучения модели в данной работе умеренное, хотя время обучения не
самое короткое, точность тестового набора самая высокая в пределах допустимого времени обуче-
ния. Подводя итог, можно сделать вывод, что предложенный метод имеет очевидные преимущества
в достоверности контроля по сравнению с другими методами.
Выявление повреждений при снижении эксплуатационных характеристик подшипников
Для дальнейшего исследования возможностей обнаружения этим методом снижения эксплу-
атационных характеристик неисправного подшипника качения, в качестве метода генерации об-
раза двумерного изображения выбирается частотно-временная диаграмма вейвлета с наилучши-
ми показателями для выявления незначительных повреждений. Как показано в табл. 1, данные
об одиночных повреждениях на различных частях внутреннего кольца, внешнего кольца и тела
качения, диаметр лунки которых увеличивается от 0,1778 до 0,7112 мм, получены в виде образцов
изображений, число образцов повреждений внутреннего кольца 3794, число образцов поврежде-
ний внешнего кольца 2856, число образцов повреждений тела качения 3798. Как указано выше,
образцы обучающего, проверочного и тестового множеств случайным образом распределяются в
соотношении 6:1:3. Следует отметить, что набор данных, используемый в данной работе, не со-
держит данных о повреждениях наружного кольца при диаметре лунки повреждения 0,7112 мм.
Образцы помещаются в СНС для обучения и верификации. Условия обучения совпадают с выше-
изложенным утверждением. Точность тестового набора в процессе обучения показана на рис. 11, а
точность окончательного тестового набора — в табл. 5.
1,0
0,8
ВнутК
ВнешК
0,6
ТК
1,0
0,4
0,2
0
50
100
0
50
100
Эпоха
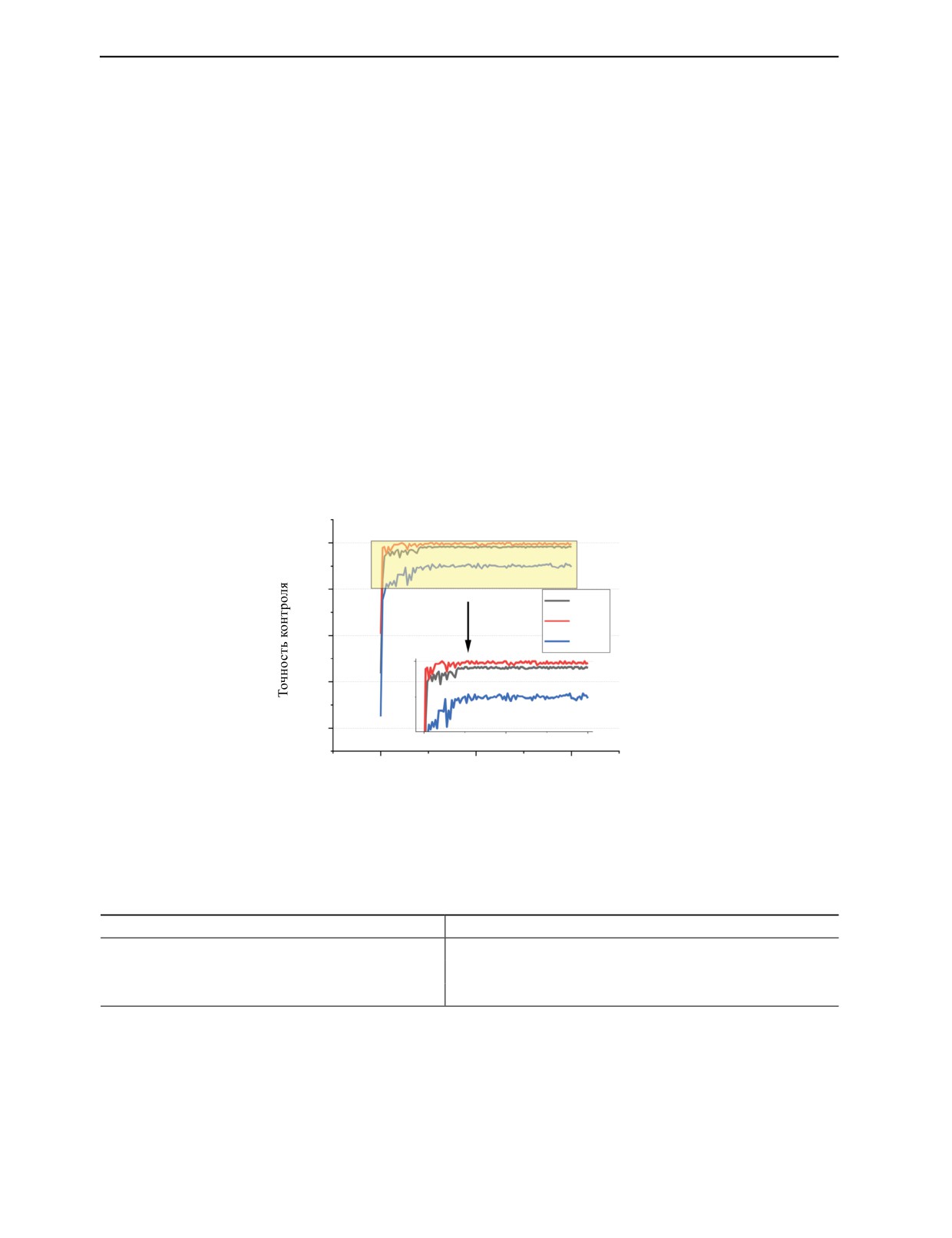
Рис. 11. Сравнение достоверности выявления различных повреждений при износе: ВнутК — внутреннее кольцо;
ВнешК — внешнее кольцо; ТК — тело качения.
Таблица
5
Достоверность выявления различных повреждений при износе
Деталь
Точность контроля
ВнутК
0,9868
ВнешК
0,9907
ТК
0,8709
ВнутК: внутреннее кольцо; ВнешК: внешнее кольцо; ТК: тело качения
Как видно из рис. 11, при наличии повреждений внутреннего и внешнего кольца достоверность рас-
познавания степени повреждения быстро увеличивается в первые несколько эпох и затем поддерживает-
ся на высоком уровне, в то время как при повреждении тела качения степень повреждения увеличивается
относительно медленнее, а уровень распознавания относительно ниже. Из табл. 5 следует, что досто-
Дефектоскопия
№ 1
2023
Методика выявления вмятин на дорожках подшипников качения на основе...
75
верность распознавания степени повреждения внутреннего и наружного колец намного выше, чем тела
качения. В заключение следует отметить, что данный метод обладает определенной достоверностью в
распознавании степени повреждения внутреннего кольца, внешнего кольца и тела качения, среди кото-
рых внутреннее кольцо и внешнее кольцо имеют относительно более высокую достоверность, а тело
качения — относительно более низкую, что также указывает на то, что выявление повреждений тела
качения является сложным и трудным.
5. ЗАКЛЮЧЕНИЕ
В данной работе в качестве основного метода выявления незначительных повреждений (вмя-
тин) была рассмотрена СНС. Для достижения хорошего результата контроля и уменьшения вре-
мени обучения СНС, сигнал вибрации подшипника уменьшается и сжимается алгоритмом КПП
для сохранения полной информации о сигнале, а затем преобразуется в различные образцы дву-
мерного изображения методом ПУРГ/ПУСГ/частотно-временная диаграмма вейвлета /МПМ. При
разработке СНС, чтобы преодолеть проблему насыщения градиента функции ReLU, после каждого
слоя свертки добавляется слой пакетной нормализации. Метод СГСИ используется для быстрой
настройки веса нейронной сети для ускорения обучения. Чтобы преодолеть нестабильность метода
СГСИ в данной работе используется метод минипакетов.
Результаты исследования показывают, что:
1) путем преобразования одномерных временных рядов сигналов вибрации подшипников в
ПУРГ/ПУСГ/частотно-временная диаграмма вейвлета СНС может быть эффективно использована
для обучения и определения класса неисправности;
2) алгоритм КПП может уменьшить размерность данных, сохраняя при этом общую информа-
цию о сигнале, что позволяет снизить нагрузку на аппаратное обеспечение для обучения модели;
3) временно-частотно-временная диаграмма вейвлета имеет некоторые преимущества в точ-
ности контроля и больше подходит для идентификации незначительных дефектов подшипников
качения;
4) независимо от вида выборки двухмерного изображения результат контроля внутреннего и
внешнего кольца лучше, чем результат контроля тела качения;
5) по сравнению с ДКП/2Н-ДКП/УРБ предложенная модель имеет очевидные преимущества в
достоверности контроля;
6) при обнаружении ухудшения эксплуатационных характеристик различных повреждений мо-
дель в данной работе имеет определенную достоверность идентификации повреждений внутрен-
него кольца, внешнего кольца и тела качения, причем достоверность идентификации повреждений
внутреннего кольца и наружного кольца выше.
Данное исследование было поддержано исследовательскими фондами, поддерживающими
проекты Политехнического института Шэньси (№ гранта 2022YKZD-001). Авторы заявляют об
отсутствии конфликта интересов.
СПИСОК ЛИТЕРАТУРЫ
1. Jie L., Changjie L., Yuhan S., Xingwei S. A study on bearing fault diagnosis based on LSGAN-SqueezeNet
2. Xiaoli Z., Minping J. Fault Diagnosis of Rolling Bearing Based on Feature Reduction with Global-
neucom.2018.07.038
3. Nibaldo R., Pablo A., Lida B., Guillermo C.G. Combining Multi-scale Wavelet Entropy and Kernelized
4. Xiaohui G., Shaopu Y., Yongqiang L., Rujiang H., Zechao L. Multi-sparsity-based blind deconvolution
and its application to wheelset bearing fault detection // Measurement. 2022. V. 199. https://doi.org/10.1016/J.
5. Mingzhu L., Shixun L., Xiaoming S., Changzheng C. Early degradation detection of rolling bearing based
on adaptive variational mode decomposition and envelope harmonic to noise ratio // Journal of Vibration and
6. Yong H., Hong W., Sui G. New fault diagnosis approach for bearings based on parameter optimized VMD
cnki.jvs.2021.06.025
7. Xiaochi L., Shi X., Yundong S., Gongmin L., Jinyu T., Xi Z., Zhuang L. Rolling bearing fault diagnosis
method based on GWO-NLM and CEEMDAN // Journal of Aerospace Power. 2022. P. 1—13. 10.13224/j.cnki.
jasp.20210547
Дефектоскопия
№ 1
2023
76
Чжэн Юа, Му Лунтао, Чжао Цзюньхао
8. Zihao L., Guangrui W., Qiao Z., Shuzhi D., Xin H., Haoxuan Z. Rolling Bearing Fault Diagnosis Based
on Multi-scale Mixed Domain Feature Extraction and Domain Adaptation // Journal of Vibration, Measurement
9. Xiaojuan L., Chengji S. Application of the P-box theory and HGWO-SVM in the fault diagnosis of
jvs.2021.22.032
10. Ming W., Zhang D., Zhen Y., Yong L., Guoqian W. Dynamic mode deco-mposition and its application
in early bearing fault diagnosis // Journal of Vibrati-on and Shock. 2022. V. 41. P. 313—320. https://doi.
org/10.13465/j.cnki.jvs.2022.12.038
11. Tianlong G., Zhenhai S., Chenzhong B., Liang C. Fault diagnosis of rollin-g bearing based on multi-
scale convolutional neural network // Machinery Design & Manufacture. 2022. V. 20. P. 20—23. https://doi.
org/10.19356/j.cnki.1001-3997.20211105.003
12. Xiaoxi D., Qingbo H. Energy-Fluctuated Multiscale Feature Learning With Deep ConvNet for Intelligent
Spindle Bearing Fault Diagnosis // IEEE Transacti-ons on Instrumentation and Measurement. 2017. V. 66.
13. Jiangtao J., Zifei X., Chun L., Wei-pao M., Jun-qing X., Kang S. Rolling bearing fault diagnosis based
on deep learning and chaotic feature fusion // Control Theory & Applications. 2022. V. 39. P. 109—116.
14. Xiaoxia Y., Baoping T., Jing W., Lei D. Fault diagnosis for aero-engine accessory gearbox by adaptive
graph convolutional networks under intense background noise conditions. 2021. V. 41. P. 78—86. https://doi.
org/10.19650/j.cnki.cjsi.J2107732
15. Wang Z., Oates T. Encoding Time Series as Images for Visual Inspection and Classification Using Tiled
Convolutional Neural Networks / Workshops at the Twenty-ninth Aaai Conference on Artificial Intelligence,
2015
16. Chaolung Y., Zhixuan C., Chenyi Y. Sensor Classification Using Convolutional Neural Network by
Encoding Multivariate Time Series as Two-Dimensional Colored Images // Sensors (Basel, Switzerland). 2020.
17. Hoonyong L., Kanghyeok Y., Namgyun K., Changbum R.A. Detecting excessive load-carrying tasks
using a deep learning network with a Gramian Angular Field // Automation in Construction. 2020. V. 120.
18. Zhupeng W., Jie C., Lianhua L., Lingling J. Fault diagnosis of wind power gearbox based on wavelet
transform and improved CNN // Journal of Zhejiang University (Engineering Science). 2022. V. 56. P.
19. Sen L., Aiguo W., Xintao D., Cuiwei Y. MGNN. A multiscale grouped convolutional neural network
COMPBIOMED.2022.105863
20. Reddy B.L., Uma M.R.N., Nelleri A. Deep convolutional neural network for three-dimensional objects
classification using off-axis digital Fresnel holography // Journal of Modern Optics. 2022. V. 69. P. 705—717.
21. Yuxian Z., Fang D. Load classification based on piecewise aggregate approximation of particle swarm
optimization // Journal of Shenyang University of Technology. 2021. V. 43. P. 123.
22. Ang G., JianYong Z., Fei M., HaoYuan S., Xing Q., Yang X., Xuan L., MengLei G., DanQi L. Electricity
Theft Detection Algorithm Based on Triplet Network // Proceedings of the CSEE. 2022. V. 42. P. 3975—3986.
23. Yunwei P., Jiang G., Taotao L., Haixiao W. A Recognition Method for Radar Emitter Signals Based
on Convolutional Neural Network with Multiple Learning Units // Journal of Beijing University of Posts and
24. Peng Y., Xiaoxu H., Yuhui H., Jin Y., Shi W., Lei L. Online alarm recognition of power grid dispatching
based on BERT-DSA-CNN and a knowledge base // Power System Protection and Control. 2022. V. 50. P. 131.
25. Ren W., Junpeng H., Qidong Y., Tianren L., Ben Y. Research of LSTM model-based intelligent guidance
of flight aircraft // Chinese Journal of Theoretical and Applied Mechanics. 2021. V. 53. P. 2054.
26. Hongrui Z., Guojun Y., Chengji Y., Guangming T., Zhan W., Zhongzhe H., Xiaoyang Z., Xuejun A.
Survey on Network of Distributed Deep Learning Training // Journal of Computer Research and Development.
2021. V. 58. P. 100.
27. Wade A.S., Robert B.R. Rolling element bearing diagnostics using the Case Western Reserve University
data: A benchmark study // Mechanical Systems and Signal Processing. 2015. V. 64. P. 100—10.
Дефектоскопия
№ 1
2023