Тепловые методы
УДК 620.179.13
ТРЕХМЕРНАЯ ТОМОГРАФИЯ РАССЕИВАЮЩИХ НЕОДНОРОДНОСТЕЙ
ЦИЛИНДРИЧЕСКОЙ МУЛЬТИСТАТИЧЕСКОЙ ЗОНДИРУЮЩЕЙ СИСТЕМОЙ
© 2023 г. Д.Я. Суханов1,*, А. Халил1,**
1 Национальный исследовательский Томский государственный университет,
Россия 634040 Томск, ул. Ленина, 36
E-mail: *sdy@mail.tsu.ru; **amoon.khalil16@gmail.con
Поступила в редакцию 25.01.2023; после доработки 16.02.2023
Принята к публикации 17.02.2023
Предлагается метод трехмерной ультразвуковой томографии на основе многостороннего зондирования с мно-
жеством излучателей и множеством приемников на цилиндрической поверхности в широкой полосе частот. Излуча-
тели и приемники размещаются на кольце, которое перемещается по вертикальной оси. Обработка сигналов основа-
на на применении согласованной фильтрации и сведена к вычислению циклической свертки по углу и вертикальной
оси, что позволяет реализовать быстрый алгоритм восстановления трехмерных изображений. Для проверки метода
разработана экспериментальная установка из 32 излучателей и 64 приемников, равномерно размещенных на кольце
радиусом 205 мм. В ходе экспериментов осуществлялось зондирование в воздухе на частотах от 38 до 43 кГц. В
результате визуализирован трехмерный объект сложной формы, что подтверждает применимость предложенного
метода.
Ключевые слова: ультразвуковая томография, MIMO, согласованная фильтрация.
DOI: 10.31857/S0130308223030053, EDN: OPDGZN
ВВЕДЕНИЕ
Системы визуализации ближнего действия (ультразвуковые и радиоволновые миллиметрового
диапазона) представляют большой интерес для широкого круга приложений, таких как дефекто-
скопия, безопасность, визуализация скрытых объектов и медицинская диагностика [1—6].
Методы визуализации на основе волнового зондирования (электромагнитного или ультра-
звукового) позволяют добиться восстановления изображения исследуемого объекта с помощью
рассеянного сигнала, и по существу основаны на решении обратной задачи рассеяния волн. Наи-
более известными методами реконструкции изображений, основанными на приближении одно-
кратного рассеяния, являются миграция во временной области [7], синтез апертуры [6] и метод
Столта [8].
Для восстановления рассеивающих и преломляющих неоднородностей применяют другие ме-
тоды [9], к которым относится трансмиссионная томография. Эти методы основаны на вычислении
прямого и обратного распространения волн в итеративном процессе.
В случае моностатического зондирования, в силу теоремы взаимности, задача обнаружения
рассеивателей может быть заменена на задачу обнаружения синфазных источников, излучающих
на удвоенной частоте, поскольку волна от источника до рассеивателя и от рассеивателя до при-
емника проходит один и тот же путь [10]. В таком случае, в приближении однократного рассеяния
восстановление рассеивателей сводится к вычислению поля обратного распространения на удво-
енных частотах. Для ускорения вычислений поля обратного распространения задача решается в
области пространственных частот на основе алгоритма быстрого преобразования Фурье (БПФ). В
случае мультистатического плоского однородного зондирования с применением множества излу-
чателей и множества приемников применение БПФ тоже возможно [11].
В данной статье рассматривается зондирующая система с равномерным распределением
источников и приемников по круговой апертуре, что позволяет свести задачу восстановления
рассеивателей к циклической свертке по углу. Кроме того, за счет однородности измерений по
вертикальной оси при сканировании кольцевой апертурой обеспечивается возможность при-
менения свертки по вертикали. В итоге, предложенный метод восстановления трехмерных
изображений позволяет ускорить вычисления за счет применения двумерной свертки, которая
реализуется через алгоритм быстрого преобразования Фурье. Разработанный метод экспери-
ментально проверен для ультразвуковых волн в воздухе. Но, кроме того, данный подход при-
меним для зондирования в иммерсионной жидкости в целях дефектоскопии и медицинской
диагностики или для радиоволнового зондирования в задачах радиотомографии и обнаруже-
ния скрытых объектов.
60
Д.Я. Суханов, А. Халил
ПРЯМАЯ И ОБРАТНАЯ ЗАДАЧИ УЛЬТРАЗУКОВОЙ ТОМОГРАФИИ
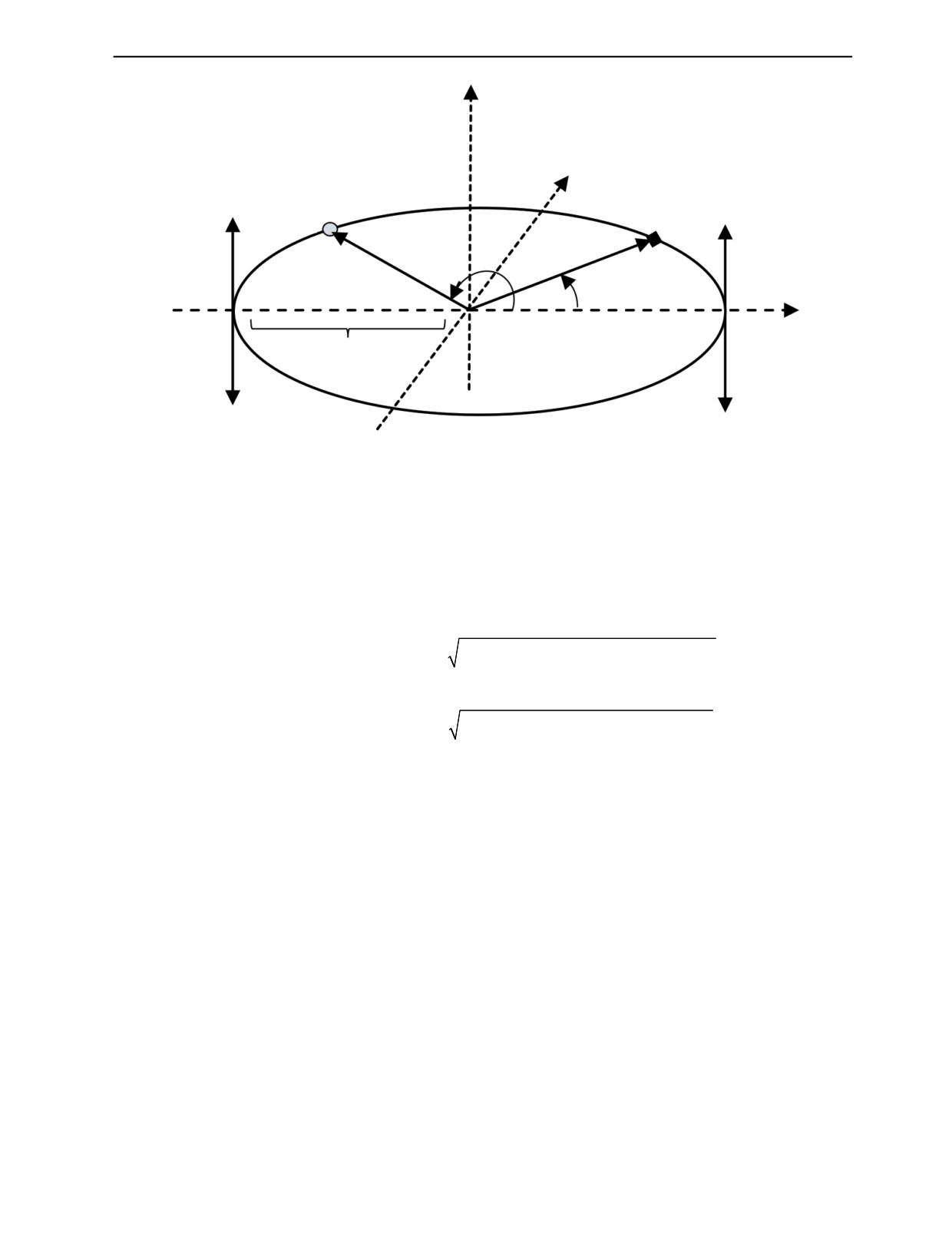
Рассмотрим томографическую систему, состоящую из множества излучателей и множества
приемников, равномерно распределенных по окружности радиуса R в одной плоскости XOY. Эта
окружность может смещаться как вверх, так и вниз по оси z (рис. 1).
Рис. 1. Рассматриваемая схема системы зондирования на основе множества излучателей и множества приемников,
размещенных на окружности:
— излучатели;
— приемники.
Прямую задачу мультистатической системы зондирования в приближении однократного рас-
сеяния можно описать следующим образом:
exp
R
−r
+
T
−r
(ik(
m
n
))
U(ϕ
,ψ
,
z′ k)
=∫∫∫ρ
(r)
dr,
(1)
n
m
4π
R
−r
T
−r
V
m
n
где Tn =(Rcosφn, Rsinφn, z′) — координата n-го излучателя; φn — угол, под которым лежит n-й из-
лучатель; Rm =(Rcosψm, Rsinψm, z′) — координата m-го приемника; ψm — угол, под которым лежит
m-й приемник (рис. 2); r =(rcosη, rsinη, z) — точка наблюдения; |Tn - r| — расстояние между из-
лучателем и точкой наблюдения; |Rm - r| — расстояние между точкой наблюдения и приемником;
k — волновое число.
Восстановление изображения рассеивающих неоднородностей (обратную задачу) без учета
убывания амплитуды с расстоянием можно осуществить с помощью согласованной фильтрации
следующим образом [12]:
ρ
(r)
=
U(ϕ
,ψ
,
z′ k)exp
−ik
R
−r
+
T
−
r
dz′dk
(
=∫ρ η z,k
)
dk,
∫∫∑∑
n
m
(
(
m
n
))
(2)
k z'
n m
k
где
ρ
(
r η,z,k
)
=
U(ϕ
,ψ
,
z′ k)exp
−ik
(
R
−r
+
T
−r
dz′dk
∫∑∑
n
m
(
m
n
))
(3)
z'
n m
Перейдем от рассмотрения дискретного множества излучателей и приемников к непрерывному
представлению и заменим суммирование в (3) на интегрирование.
Можно переписать расстояния |Tn - r| и |Rm - r| следующим образом:
2
2
T
−
r
=
R
+
r
−2
Rrcos
(
ϕ
−η
)
+
(
z'−
z
)2
,
n
n
2
2
R
−
r
=
R
+
r
−
2Rrcos
(
ψ
−η
)
+
(
z'−
z
)2
m
m
Трехмерная томография рассеивающих неоднородностей цилиндрической ...
61
z
Приемник
y
Излучатель
Rm
Tn
ψm
φn
x
R
Рис. 2. Схема мультистатического зондирования с цилиндрической апертурой.
Подставляя эти два соотношения в уравнение (3), получим:
ρ η,z,k)
=
U
(
ϕ
,ψ
, z′,k
)
E
(
r,ψ
−η,z′− z
)
E
(
r,ϕ
−η,z′− z
)
dz′d
ψ
d
ϕ
,
∫∫∫
n
m
1
m
2
n
m n
(4)
ϕ
,
n m
ψ
,z '
где
2
2
2
E
(
r,ψ
−η,z′- z
)
=
exp
−ik R
+r
−2Rr
cos
(
ψ
−η
)
+
(
z′- z
)
,
1
m
(
m
)
2
2
2
E
(
r,ϕ
−η,z′- z
)
=
exp
−ik R
+r
−2Rr
cos
(
ϕ
−η
)
+
(
z′- z
)
2
n
(
n
)
Применим двумерное преобразование Фурье к уравнению (4) по z и η следующим образом:
P
(r,κ
,κ
,k)
=
U
(
ϕ
,
ψ
,
z
′
,k
)
,
η
z
∫∫∫
n
m
ϕ
,
ψn m
,z′
(5)
E
(
ψ
−η,z′− z
)
E
(
ϕ
−η,z′− z
)
exp
(
iκ
η
)
exp
(
ik
z
)
dηdzdz′dϕ
d
ψ
∫∫
1
m
2
n
η
z
n
m
η,z
Заменим переменные в предыдущем уравнении в соответствии с выражениями ψm - η = Ф,
z′ - z = Z, φn - ψm = Δ φ. После алгебраических преобразований выражение (5) примет вид:
r,
κ
,κ
,k)
=-
(
U ∆ϕk,κ
,
κ
) (
r k,
∆ϕ
,
−κ
,
−κ
)
d∆ϕ
,
η
z
∫
η
z
η
z
(6)
∆ϕ
где
(
U ∆ϕk,κ
,κ
)
=
U
(
∆ϕ,ψ
,
z
′,
k
)
exp
(
i
κ
ϕ
)
exp
(
i
κ
z
)
dzd
ψ
,
η
z
∫∫
m
η
m
z
m
ψ
m
,
z
62
Д.Я. Суханов, А. Халил
Q(r k,∆ϕ,−κ
,−κ
=
E
(
r k,Φ,Z
)
E
(
r k,∆ϕ + Φ,Z
)
exp
−iκ
Φ
exp
(
−iκ
Z
)
dϕdZ
=
η
z
)
∫∫
1
2
(
η
)
z
ϕ,Z
=
Q
(
r k,∆ϕ,Φ,Z
)
exp
−iκ
Φ
exp
(
−iκ
Z
)
dϕdZ
∫∫
(
η
)
z
ϕ,Z
Применим двумерное обратное преобразование Фурье к уравнению (6) по κz и κη и проинтегри-
руем по k следующим образом:
ρ η,z)
=
P(r,κ
,κ
,k)exp
−iκ
ϕ
exp
(
−iκ
z
)
dκ dκ
dk
=
∫
∫∫
η
z
(
η
)
z
η
z
k
κ
,
κ
η
z
=-
(
U ∆ϕk,κ
,
κ
) (
r k,∆ϕ,
−κ
,−κ
)
exp
(
−i
κ
ϕ
)
exp
(
−iκ
z
)
dκ dκ
d∆ϕdk
∫∫
∫∫
η
z
η
z
η
z
η
z
k
∆ϕκ κz
η
или
ρ η,z)
=-
IFT
FT U(∆ϕ
,ψ
, z′,k
FT Q(
r k,
∆ϕ,Φ,
Z
d∆ϕdk,
∫∫
(
2D
2
D
m
))
2D
)))
(7)
k ∆ϕ
где
FT
(.)
— двумерное преобразование Фурье;
IFT
(.)
— двумерное обратное преобразование
2
D
2
D
Фурье.
Таким образом, трехмерное изображение рассеивающих неоднородностей можно восстановить
с помощью множества двумерных преобразований Фурье, а, значит, ускорить процесс восстанов-
ления. Остается интегрирование для различных частот и различных разностей угловых положений
излучателей и приемников, но такой объем вычислений приемлем для современных компьютеров.
МОДЕЛИРОВАНИЕ ПРЕДЛАГАЕМОГО МЕТОДА
Рассмотрим широкополосную систему зондирования из 32 излучателей и 64 приемников, ко-
торые размещаются равномерно по окружности радиуса R = 205 мм в одной плоскости XOY и
двигаются вверх и вниз по оси z с шагом 3,5 мм. Применим зондирующий ультразвуковой широко-
полосный сигнал в полосе частот от 38 до 43 кГц. Скорость звука предполагается равной 342 м/с.
Было проведено моделирование для визуализации четырех точечных рассеивателя в
разных координатах: первый — (0, -100, 120) мм; второй — (0, 100, 150) мм; третий —
(-100, 0, 40) мм; четвертый — (100, 0, 120) мм. Изображение рассеивающих объектов восстанов-
лено предложенным методом (рис. 3). Для заполнения апертуры однородным множеством точек по
углу, данные были дополнены нулями до 128 приемников и 128 излучателей. На реконструирован-
ном изображении можно видеть наличие четырех точек в позициях, совпадающих с размещением
рассеивателей. Наблюдаются артефакты, связанные с разреженным размещением датчиков.
Разрешающая способность системы в плоскости (x, y) определяется половиной длины волны
(λ/2) самой высокочастотной компоненты сигнала, а разрешение в центре системы по вертикали
R
λ
Δz зависит от соотношения высоты H и радиуса зондирующей системы:
z
∆
= . Простран-
H
ственное разрешение по оси z хуже, так как размер апертуры по вертикали H сравним с радиусом
кольца R, т.е. Δz ≈ λ.
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
Для экспериментальной проверки системы визуализации с множеством излучателей и множе-
ством приемников была разработана экспериментальная установка на основе микроконтроллера
STM32F407, который использовался для генерирования зондирующих сигналов и для оцифров-
ки принятых рассеянных сигналов. Зондирование проводилось в воздухе линейно-частотно мо-
дулированным сигналом в диапазоне частот от 38 до 43 кГц. Для излучения и приема применя-
лись пьезокерамические сенсоры Murata MA40S4R/S. В микроконтроллер STM32F407 имеется
Трехмерная томография рассеивающих неоднородностей цилиндрической ...
63
а
20
15
10
4
5
0
-5
-10
1
-15
-20
-20
-15
-10
-5
0
5
10
15
20
x, см
б
в
20
20
15
15
3
10
10
4
2
1
5
5
0
0
-20
-15
-10
-5
0
5
10
15
20
-20
-15
-10
-5
0
5
10
15
20
y, см
x, см
Рис. 3. Восстановленное изображение точечных рассеивателей по данным численного моделирования:
а — проекция XOY при z = 120 мм; б — проекция YOZ при x = 0 мм; в — проекция XOZ при y = 0 мм.
два цифроаналоговых преобразователя (ЦАП). Каждый канал ЦАП подключался к 16-канальным
мультиплексорам 74HC4067, что в итоге обеспечило 32 канала передачи, которые активируются
по очереди. Прием сигналов осуществлялся с помощью восьми аналого-цифровых преобразовате-
лей (АЦП) микроконтроллера STM32F407, которые подключались к восьми 16-канальным муль-
типлексорам 74HC4067 для обеспечения 64 приемных каналов. Переключение мультиплексоров
приемного тракта синхронизировано с работой АЦП, что позволило почти одновременно оцифро-
вывать сигналы с 64 каналов. Передача данных в компьютер проводилась по интерфейсу Ethernet,
протокол UDP.
Зондирующая система состоит из 32 излучателей, равномерно расположенных по окружности
12π
радиусом R = 205 мм и углом размещения
ϕ
=
n
+
, и 64 приемников, которые равномерно
n
4
32
2π
размещаются по той же окружности с углом
ψ
=
m
. Эта окружность перемещается по оси z с
m
64
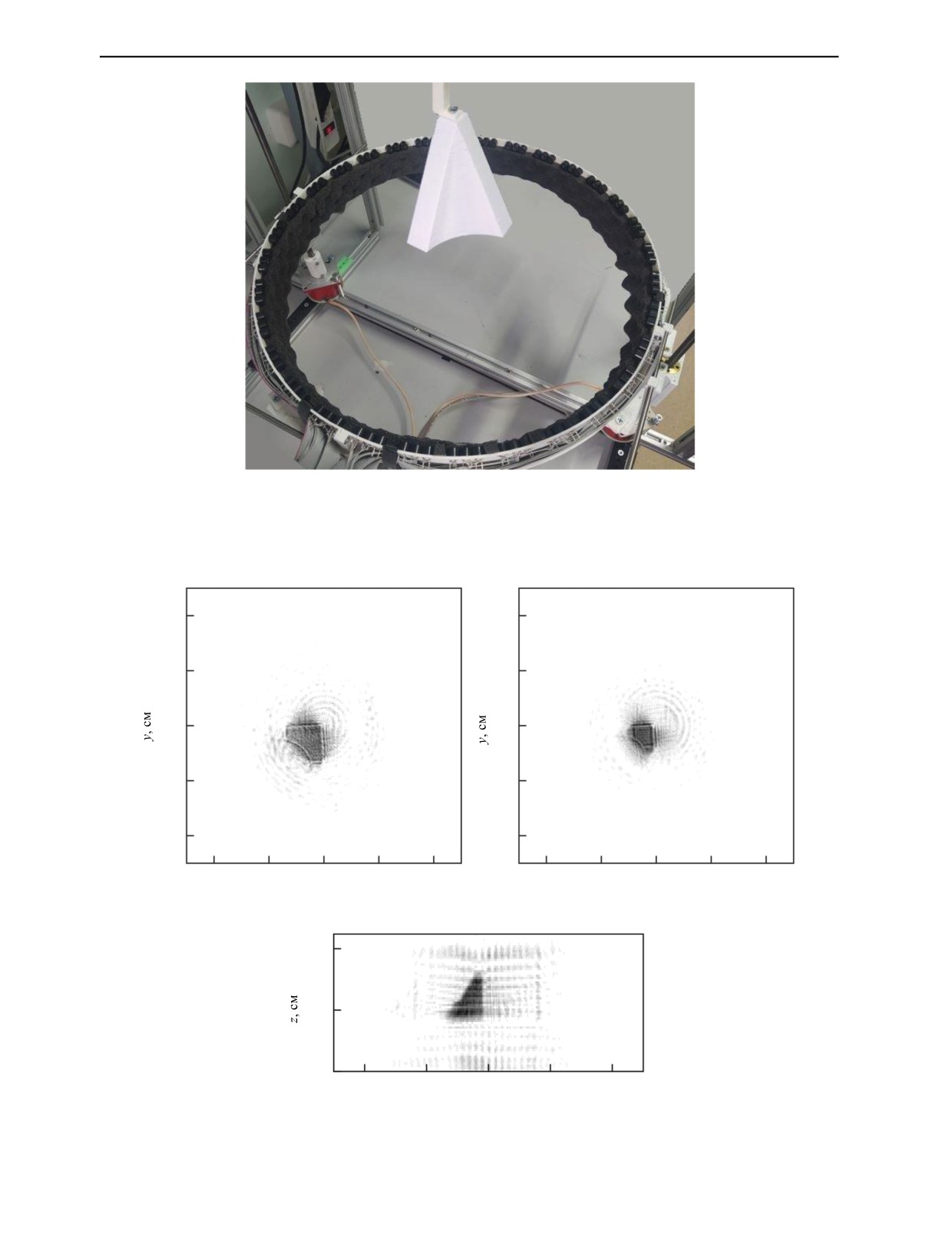
помощью двух шаговых двигателей (рис. 4). При движении эта окружность описывает виртуаль-
ный цилиндр, в котором размещается исследуемый объект. Количество шагов по оси z равно 64,
длина шага равна 3,5 мм. Процесс сканирования занимает 317 с, включая измерение отраженных
сигналов и движение окружности по оси z, а процесс восстановления изображения с помощью
параллельного программирования занимает 180 с.
Разработанный метод рассчитан на визуализацию рассеивающих неоднородностей и приме-
ним для восстановления изображения внешнего контура исследуемых объектов. Был проведен
64
Д.Я. Суханов, А. Халил
Рис. 4. Фото эксперимента по ультразвуковому зондированию тестового объекта, расположенного внутри цилиндра.
а
б
20
20
10
10
0
0
-10
-10
-20
-20
-20
-10
0
10
20
-20
-10
0
10
20
x, см
x, см
в
20
10
0
-20
-10
0
10
20
x, см
Рис. 5. Плоские сечения восстановленного трехмерного изображения:
а — в плоскости XOY при z = 10 см; б — при z = 13 см; в — плоскость XOZ при y = 0 см.
Трехмерная томография рассеивающих неоднородностей цилиндрической ...
65
эксперимент для визуализации пластикового объекта из полилактида — ПЛА (см. рис. 4). Плот-
ность ПЛА составляет 1240 кг/м3, скорость звука в этом материале 2246 м/с. Поскольку контраст
ПЛА с воздушной средой слишком велик, то почти все падающие ультразвуковые волны отра-
жаются от поверхности. При обработке из измеренных данных вычитались фоновые сигналы,
которые были измерены при отсутствии тестового объекта. Было восстановлено трехмерное изо-
бражение по формуле (7). Восстановленное изображение показано в разных проекциях на рис. 5.
Можно видеть, что изображение объекта восстановлено. По сути, оно состоит из двух изобра-
жений: восстановленного по отраженным волнами и восстановленного по прошедшим на просвет
волнам. За счет отраженных волн визуализируются резкие контуры объекта, а за счет проходящих
волн получено теневое изображение всего объекта в целом.
ЗАКЛЮЧЕНИЕ
Предложен метод трехмерной ультразвуковой томографии на основе мультистатического зон-
дирования с цилиндрической поверхности. Излучатели и приемники равномерно размещаются на
кольце, которое перемещается по вертикальной оси. Предложен быстрый алгоритм восстановления
трехмерных изображений на основе алгоритма быстрого преобразования Фурье. Разработана экс-
периментальная установка из 32 излучателей и 64 приемников для воздушной среды, работающая
в диапазоне частот от 38 до 43 кГц. Численное моделирование и эксперименты подтвердили воз-
можность получения трехмерных изображений рассеивающих объектов предложенным методом.
Результаты были получены в рамках выполнения государственного задания Минобрнауки Рос-
сии, проект № FSWM-2020-0038.
СПИСОК ЛИТЕРАТУРЫ
1. Sheen D.M., McMakin D.L., Hall T.E. Three-dimensional millimeter-wave imaging for concealed
weapon detection // IEEE Trans. Microw. Theory Techn. 2001. V. 49. No. 9. P. 1581—1592.
2. Zhuge X., Yarovoy A.G. Three-dimensional near-field MIMO array imaging using range migration
techniques // IEEE Trans. Image Process. 2012. V. 21. No. 6. P. 3026—3033.
3. Li J., Stoica P. MIMO Radar Signal Processing. Hoboken, N.-J.: Wiley-IEEE Press, 2008. P. 472.
4. Dolmatov D.O., Ermoshin N.I., Koneva D.A., Sednev D. A. Application of Nonuniform Fourier
Transform to Solving Ultrasonic Tomography Problems with Antenna Arrays // Russ. J. Nondestruct. Test.
2020. V. 56. P. 603—610.
5. Суханов Д.Я., Халил А. Получение трехмерных акустических изображений на основе широкопо-
лосного зондирования системой из множества излучателей и множества приемников // Радиотехника.
2022. № 12. С. 137—146.
6. Суханов Д.Я., Халил А. Волновая зондирующая система с оптимальной взаимной ориентацией ре-
шетки излучателей и решетки приемников для визуализации рассеивающих объектов // Техника радио-
связи. 2022. № 3. С. 62—70.
7. Goldsmith P.F., Hsieh C., Huguenin G.R., Kapitzky J., Moore E.L. Focal plane imaging systems for
millimeter wavelengths // IEEE Transactions on Microwave Theory and Techniques. 1993. V. 41. No. 10.
Р. 1664—1675.
8. Stolt R. Migration by Fourier transform techniques // Geophys. 1978. V. 43. No. 1. Р. 23—48.
9. Bazulin E.G., Goncharsky A.V., Romanov S.Ya., Seryozhnikov S. Yu. Inverse Problems of Ultrasonic
Tomography in Nondestructive Testing: Mathematical Methods and Experiment // Russ. J. Nondestruct. Test.
2019. V. 55. P. 453—462.
10. Lopez-Sanchez J.M., Fortuny-Guash J. 3-D radar imaging using range migration techniques //
IEEE Trans. Antennas. Propag. 2000. V. 48. No. 5. P. 728—737.
11. Базулин Е.Г. О возможности использования в ультразвуковом контроле двойного сканирова-
ния для повышения качества изображения рассеивателей // Акустический журнал. 2001. Т. 47. № 6.
С. 741—745.
12. Khalil A. Implementation of Ultrasonic Tomography of Scatterers Based on a Circular Array / 2022
International Siberian Conference on Control and Communications. Tomsk, Russian Federation. 2022.
P. 1—4.