Акустические методы
УДК 620.179.162
УЛЬТРАЗВУКОВАЯ ТОМОГРАФИЯ С ПРИМЕНЕНИЕМ РАЗРЕЖЕННЫХ
МАТРИЧНЫХ АНТЕННЫХ РЕШЕТОК И ЦИФРОВОЙ КОГЕРЕНТНОЙ
ОБРАБОТКИ С РАСЧЕТАМИ В ЧАСТОТНОЙ ОБЛАСТИ
© 2023 г. Д.О. Долматов1,*, А.Р. Хайруллин1,**, В.А. Смолянский1,***
1Национальный исследовательский Томский политехнический университет, Россия 634040 Томск,
пр-т Ленина, 30
E-mail: *dolmatovdo@tpu.ru;** arh5@tpu.ru; *** vsmol@tpu.ru
Поступила в редакцию 23.02.2023; после доработки 19.03.2023
Принята к публикации 24.03.2023
На сегодняшний день актуальной проблемой для промышленной ультразвуковой томографии с применением
цифровой когерентной обработки сигналов матричных антенных решеток является повышение скорости получения
результатов в форме изображений дефектов в объектах контроля. Одним из подходов, направленных на решение
указанной задачи, является применение разреженных матричных АР. В данной работе рассмотрено совместное при-
менение разреженных матричных преобразователей, работающих в раздельном режиме, и алгоритма цифровой коге-
рентной обработки сигналов, который основан на использовании расчетов в частотной области. Этот алгоритм бази-
руется на применении неэквидистантного быстрого преобразования Фурье. Эффективность рассмотренного подхода
подтверждается экспериментально.
Ключевые слова: ультразвуковой неразрушающий контроль, ультразвуковая томография, алгоритмы цифровой коге-
рентной обработки с расчетами в частотной области, неэквидистантное быстрое преобразование Фурье, разреженные
матричные антенные решетки.
DOI: 10.31857/S0130308223050019, EDN: YXIFOQ
ВВЕДЕНИЕ
В данный момент актуальным вопросом исследований и разработок в области ультразвуко-
вого неразрушающего контроля является переход к решению задачи точного определения пара-
метров дефектов (дефектометрии). Этим фактом обусловлен интерес к применению ультразву-
ковой томографии с применением цифровой когерентной обработки сигналов антенных решеток
(АР), которая основана на использовании метода синтезированной апертуры (Synthetic Aperture
Focusing Technique). Технологии, которые базируются на подобном подходе (Total Focusing
Method [1], Цифровая фокусировка антенной [2, 3], Sampling Phase Array [4] и др.), получают
все большее применение в современных дефектоскопах на АР и находят отражение в совре-
менных международных стандартах в области ультразвукового неразрушающего контроля [5, 6].
Промышленная ультразвуковая томография с матричными АР способна обеспечить получение
в одной измерительной позиции трехмерных изображений дефектов, имеющих высокое разре-
шение. При этом восстановление изображений дефектов в режиме реального времени при ис-
пользовании матричных АР затруднено в связи со значительным объемом сигналов, подлежащих
цифровой когерентной обработке. Одним из подходов, направленных на повышение скорости
восстановления изображений, является применение разреженных АР. В этом случае в АР огра-
ничивается количество активных элементов, участвующих в процессах зондирования контроли-
руемых объектов и приеме эхосигналов [7—9].
В контексте применения разреженных АР представляет интерес их совместное использо-
вание с алгоритмами цифровой когерентной обработки с расчетами в частотной области. Это
обусловлено способностью данных алгоритмов обеспечивать восстановление изображений де-
фектов в контролируемых образцах с более высокой скоростью по сравнению с алгоритмами,
использующими расчеты во временной области [10—14]. Особенностью алгоритмов, использу-
ющих расчеты в частотной области, является то, что они базируются на использовании преоб-
разования Фурье. При этом на практике применяется алгоритм быстрого преобразования Фурье
(БПФ), который работает с данными, заданными на регулярной сетке. В свою очередь, исполь-
зование разреженных АР подразумевает, что данные заданы на нерегулярной сетке. Это требует
адаптации существующих алгоритмов с расчетами в частотной области, реализующих цифровую
когерентную обработку сигналов АР.
Ранее [15] было рассмотрено применение алгоритма, использующего расчеты в частотной об-
ласти, для цифровой когерентной обработки сигналов неэквидистантной матричной АР, работа-
4
Д.О. Долматов, А.Р. Хайруллин, В.А. Смолянский
ющей в совмещенном режиме. Указанный алгоритм базируется на применении неэквидистантно-
го быстрого преобразования Фурье (НБПФ) [16]. Тем не менее при использовании АР большей
эффективностью обладают раздельные режимы работы подобных преобразователей, при которых
прием эхосигналов одновременно осуществляется несколькими элементами. Примером подобно-
го режима является режим двойного сканирования [17] (в англоязычной литературе Full Matrix
Capture [18]).
Таким образом, в данной работе рассматривается алгоритм цифровой когерентной обработки,
который основан на использовании расчетов в частотной области и применении НБПФ. Данный
алгоритм обеспечивает цифровую когерентную обработку сигналов разреженной матричной АР,
работающей в раздельном режиме регистрации данных.
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЯ
Алгоритм неэквидистантного быстрого преобразования Фурье. Задача получения образа
Фурье f (k1, k2, …, kn) многомерной функции F(x1, x2, …, xn) может быть рассмотрена как несколько
последовательных НБПФ относительно каждой из переменных. В этой связи исследуем алгоритм
НБПФ функции F(x) одной переменой. Реализация алгоритма НБПФ включает последовательное
применение операции свертки с гауссианой, применение БПФ и реализацию обратной свертки [16].
На первом этапе для осуществления операции свертки задается регулярная сетка. Размерность
данной сетки определяется величиной, называемой степенью передискритизации. Данное значе-
ние является входным параметром для алгоритма НБПФ. В общем случае частота дискретизации
данной сетки выше требуемой, что направлено на обеспечение высокой точности осуществления
операции свертки.
Для каждой точки xj функции F(x) на регулярной сетке определяется ближайшая точка ξ, при
этом ξ < xj. Полученная точка используется для определения значений, определяющих форму гаус-
совой кривой:
2
(x
−ξ)
j
E
=
exp
−
;
(1)
1
4τ
π(x
j
−ξ)
E
=
exp
;
(2)
2
M
τ
r
2
E
(k) = expτk
,
k
< N /2,
(3)
3
где τ — величина, задающая ширину гауссовой кривой; Mr — количество отсчетов в регулярной
сетке, имеющей повышенный шаг дискретизации; k — волновое число; N — размеры регулярной
сетки, для которой производится НБПФ.
Для каждой точки xj вычисляется:
V = F(xj) · E1 · E2 (n1);
(4)
Fτ (m + n) = Fτ (m + n) + V,
(5)
где
n=-M
sp
+1,M
sp
; Msp
— количество точек на регулярной сетке с повышенной частотой дис-
кретизации в окрестности точки xj.
В результате определяется функция Fτ(m), которая располагается на регулярной сетке. На сле-
дующем этапе с применением БПФ получают образ Фурье fτ(k) данной функции. На последнем
этапе осуществляется операция обратной свертки:
π
f (k)
=
⋅ E
(k)⋅ f (k).τ
(6)
3
τ
Дефектоскопия
№ 5
2023
Ультразвуковая томография с применением разреженных матричных антенных решеток...
5
Алгоритм на основе НБПФ при использовании раздельных режимов регистрации
ультразвуковых сигналов. Рассмотрим случай непосредственного размещения матричной АР
на поверхности объекта контроля. В таком случае задача восстановления изображений дефектов
может быть решена за счет адаптации алгоритма, рассмотренного в [10] для случая реализации
трехмерной цифровой когерентной обработки и применения разреженного преобразователя.
Набор сигналов, полученный в процессе сканирования объекта контроля матричной АР с при-
менением раздельных режимов регистрации данных, может описан функцией P(t, xe, ye, xtr, ytr), где
t — время; xe, ye — координаты зондирующего элемента; xtr, ytr — координаты элемента, принима-
ющего эхосигналы. Использование разреженной АР подразумевает, что данные заданы на нерегу-
лярной сетке. На первом этапе осуществляется НБПФ функции P(t, xe, ye, xtr, ytr):
P t,x
,
y
, x
,
y
) НБПФ→p(ω,k
,k
,k
,k
),
(7)
tr
tr
e
e
trx
try
ex
ey
где ktrx, ktry, kex, key являются компонентами волнового вектора k, а ω — угловая частота.
НБПФ поочередно осуществляется для всех переменных функции P(t, xe, ye, xtr, ytr) с использо-
ванием выражений (1)—(6). Результатом применения НБПФ является функция p(ω, ktrx, ktry, kex, key),
которая задана на равномерной сетке. Цифровая когерентная обработка производится отдельно для
каждого из L слоев, в которых p(ω, ktrx, ktry, kex = const, key = const). В рамках обработки осуществля-
ется замена переменных и интерполяция:
p ω
k
,k
,
k
=
const,
k
=
const)
→ p
(k
,k
,k
),
i=1,L
(8)
i
trx
try
ex
ey
i
x
y
z
При этом зависимость между ktrx, ktry, kex, key и компонентами волнового вектора kx, ky, kz опреде-
ляется следующими выражениями:
kxe = kx - kxtr ;
(9)
kye = ky - kytr ;
(10)
2
2
2
2
2
2
2
2
k
+
k
+
k
−(k
+k
)
+
4k
(k
+k
)
(
z
(
xtr
ytr
)
xe
ye
)2
z
xe
ye
(11)
k
=
2kz
На следующем этапе все результаты суммируются для получения общего результата. Полу-
чение изображения дефектов обеспечивается путем применения алгоритма обратного быстрого
преобразования Фурье (ОБПФ) к результатам суммирования:
L
p(k
,k
,k
)
p
(k
,k
,k
);
(12)
x
y
z
=∑
i
x
y
z
i =1
p(k
,k
,k
)
ОБПФ→I x,y,
z).
(13)
x
y
z
Экспериментальная часть. Эффективность алгоритма на основе НБПФ была проверена с помо-
щью серии экспериментов. Для этого использовался экспериментальный стенд, основой которого яв-
лялся многоканальный блок ультразвуковой электроники OPTUS (I-Deal Technologies GmbH, рис. 1).
Рис. 1. Электронный блок OPTUS.
Дефектоскопия
№ 5
2023
6
Д.О. Долматов, А.Р. Хайруллин, В.А. Смолянский
Рис. 2. Ультразвуковая матричная АР Doppler 5M8×8BP 1.0.
В экспериментах в качестве преобразователя использовалась матричная АР Doppler 5M8×8BP1.0
(рис. 2). Элементы данного преобразователя имеют рабочую частоту 5 МГц и формируют матрицу
размером 8×8 элементов с шагом 1 мм.
В рамках экспериментальной верификации рассматривались АР, в которой все элементы были
активными (конфигурация матричной АР № 1), а также разреженные АР, состоящие из 56 (конфи-
гурация матричной АР № 2), 48 (конфигурация матричной АР № 3), 40 (конфигурация матричной
АР № 4) и 32 активных элементов (конфигурация матричной АР № 5). На рис. 3 представлены
конфигурации рассмотренных АР. Конфигурации разреженных преобразователей, рассмотренных
в экспериментальной верификации, были определены произвольным образом.
а
б
в
г
д
— активный элемент
— неактивный элемент
Рис. 3. Конфигурации АР, рассмотренных при проведении экспериментов: конфигурация № 1 (а); конфигурация № 2 (б);
конфигурация № 3 (в); конфигурация № 4 (г); конфигурация № 5 (д).
При проведении экспериментальной верификации был использован участок тестового образ-
ца из стали толщиной 30 мм. В данном участке расположено плоскодонное отверстие диаметром
2 мм. Глубина сверления данного отверстия составляет 10 мм.
Получение набора сигналов для каждой рассмотренной конфигурации матричной АР осу-
ществляли в одной измерительной позиции. Процессы зондирования объекта контроля и при-
ема эхосигналов проходили в несколько циклов. На каждом из циклов один из активных эле-
ментов разреженной матричной АР работал в качестве зондирующего элемента, в то время
как отраженные эхосигналы регистрировались всеми активными элементами преобразователя.
Количество указанных циклов равнялось количеству активных элементов в рассматриваемой
конфигурации матричной АР. Полученные наборы сигналов служили исходными данными для
рассмотренного алгоритма на основе НБПФ, который был реализован в программном пакете
Matlab. Результатом работы алгоритма являлись трехмерные изображения дефекта в контроли-
руемом участке. В рассмотренной экспериментальной верификации для каждой конфигурации
матричной АР восстанавливалось изображение, состоявшее из 9·104 вокселей. Восстановле-
ние изображений происходило с применением ЭВМ, имеющей восьмиядерный процессор Intel
core i7 10700 и ОЗУ 64 Гб. Для оценки работы алгоритма на основе НБПФ определяли время,
затраченное на восстановление изображении, а также разрешение, контраст и отношение сиг-
нал/шум (ОСШ) результатов.
Дефектоскопия
№ 5
2023
Ультразвуковая томография с применением разреженных матричных антенных решеток...
7
Оценку разрешения полученных изображений осуществляли с применением значения Array
Performance Indicator (API) [19]. В случае восстановления трехмерных результатов API может быть
определен по следующей формуле:
V
-6
дБ
API
=
,
(14)
3
λ
где V-6дБ — объем отражателя, в котором амплитуда синтезированного изображения выше порога
в -6 дБ от максимальной амплитуды, соответствующей этому отражателю на синтезированном
изображении; λ — длина волны.
Для оценки ОСШ может быть использовано выражение [20]:
I
1
SNR
=
20⋅log
10
,
(15)
I
2
где I1 — максимальная амплитуда вокселя, соответствующего отражателю на синтезированном
изображении; I2 — максимальная амплитуда вокселя в области, не содержащей отражателя.
Определение контраста может быть проведено с использованием следюущего выражения:
I
−
I
r
C
=
b ,
(16)
Ir
где Ir — максимальная амплитуда образа дефекта на синтезированном изображении; Ib - макси-
мальная амплитуда синтезированного изображения вне образа дефекта.
Для оценки эффективности работы рассмотренного алгоритма к тем же наборам сигналов при-
менялась цифровая когерентная обработка, базирующаяся на использовании расчетов во времен-
ной области, которая на сегодняшний день является более применимой в ультразвуковом неразру-
шающем контроле [11]. Для этой цели алгоритм, рассмотренный в [1], был адаптирован для трех-
мерного случая и также был реализован в программном пакете Matlab. В рамках сравнительного
анализа алгоритма на основе НБПФ и алгоритма, использующего расчеты во временной области,
проводилось сравнение времени, затраченного на восстановление изображений, а также значений
API, контраста и ОСШ полученных трехмерных результатов.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ И ИХ ОБСУЖДЕНИЕ
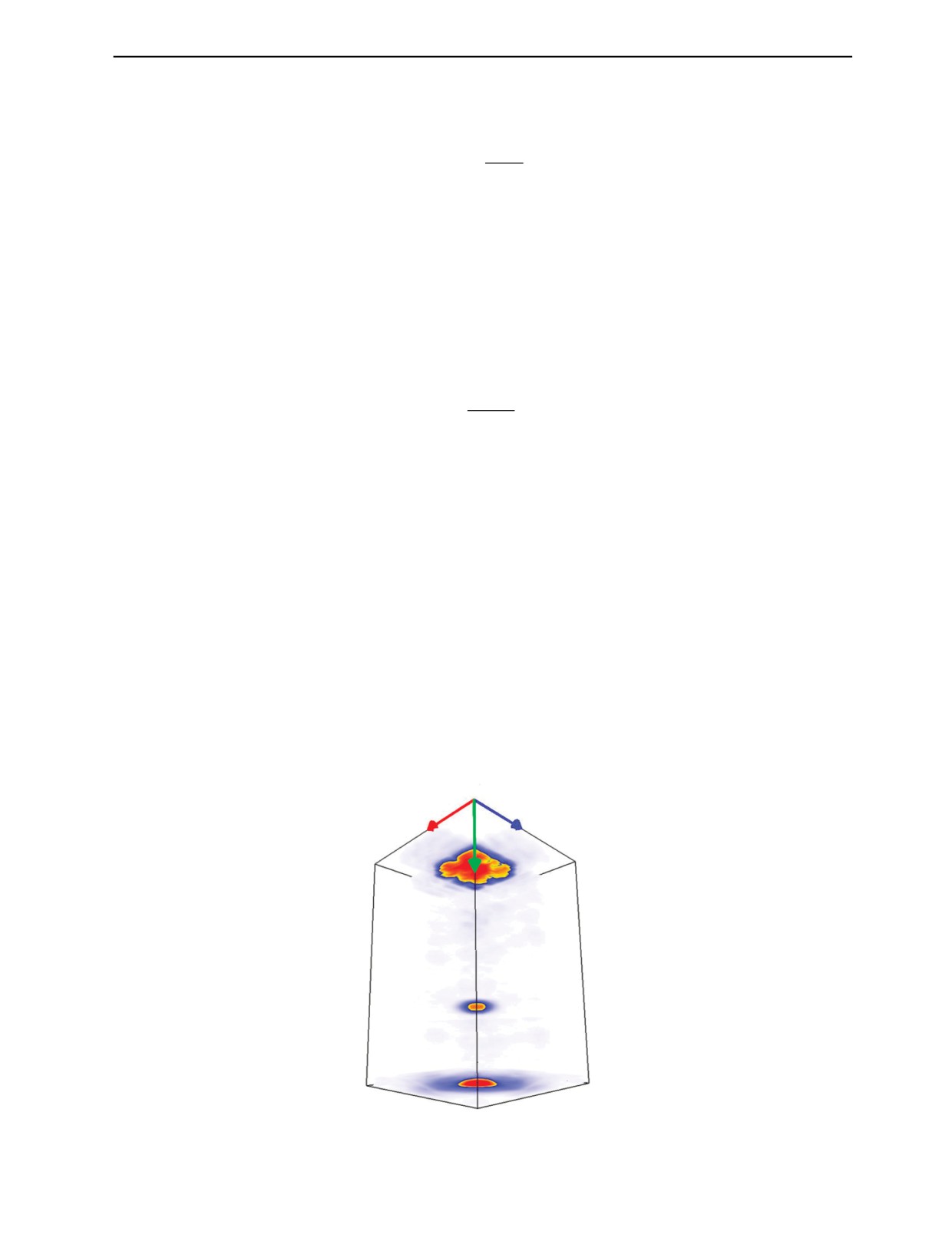
Итогом работы алгоритмов цифровой когерентной обработки сигналов во всех случаях явля-
лось трехмерное изображение дефекта в тестовом образце. Пример подобного изображения пред-
ставлен на рис. 4.
00
Y
X
10
10
20
20
0
15 Z
30
Рис. 4. Пример результата трехмерной когерентной обработки сигналов разреженной матричной АР.
Дефектоскопия
№ 5
2023
8
Д.О. Долматов, А.Р. Хайруллин, В.А. Смолянский
а
б
в
г
д
Амплитуда, %
–10
-10
-10
-10
-10
100
80
60
0
0
0
0
0
40
20
10
10
10
10
10
–10
0
10
-10
0
10
-10
0
10
-10
0
10
-10
0
10
Ось X, мм
Ось X, мм
Ось X, мм
Ось X, мм
Ось X, мм
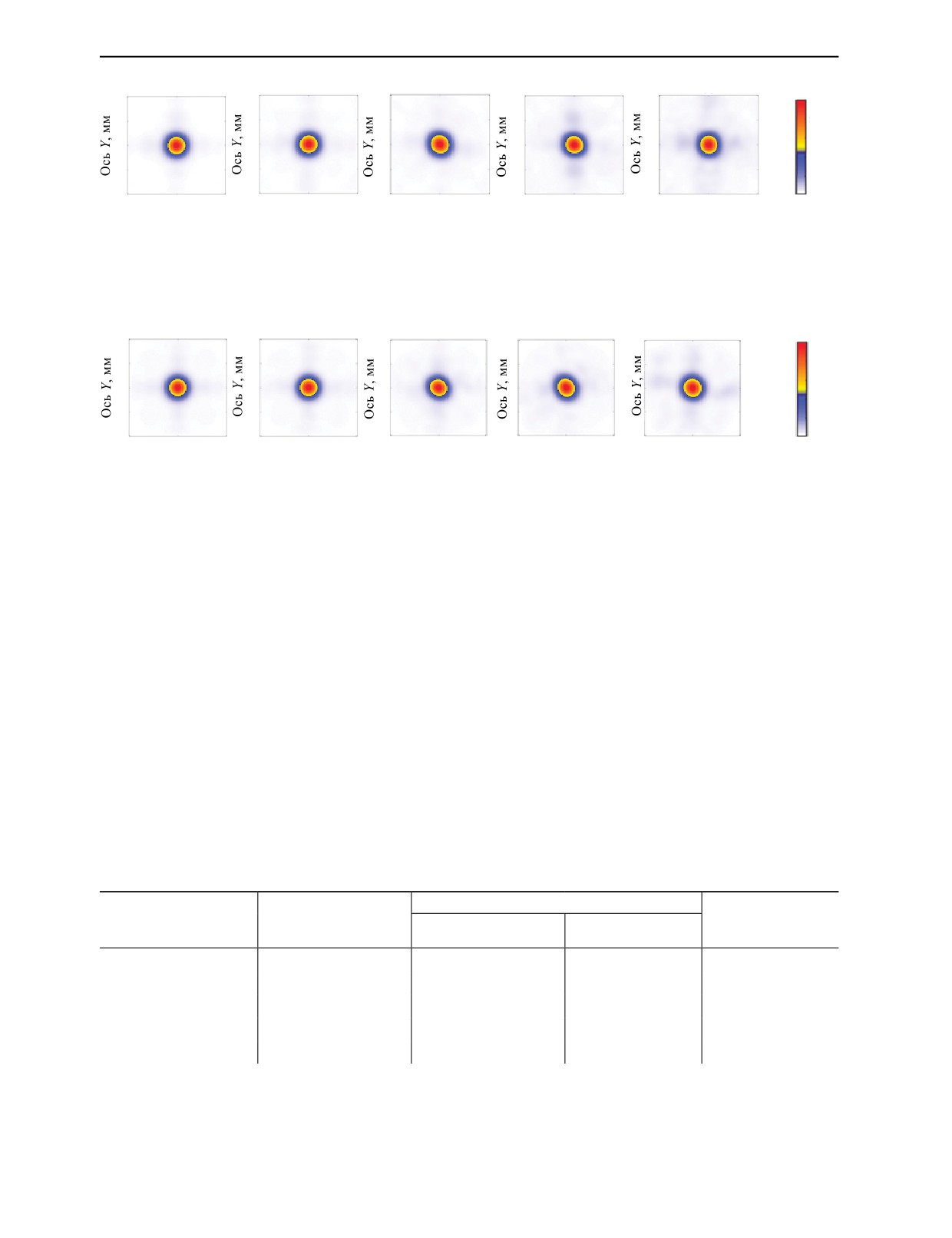
Рис. 5. Результаты цифровой когерентной обработки сигналов матричных АР с применением алгоритма на основе НБПФ:
конфигурация № 1 (а); конфигурация № 2 (б); конфигурация № 3 (в); конфигурация № 4 (г); конфигурация № 5 (д).
а
б
в
г
д
Амплитуда, %
–10
–10
-10
-10
-10
100
80
0
0
0
0
0
60
40
20
10
10
10
10
10
–10
0
10
-10
0
10
-10
0
10
-10
0
10
-10
0
10
Ось X, мм
Ось X, мм
Ось X, мм
Ось X, мм
Ось X, мм
Рис. 6. Результаты цифровой когерентной обработки сигналов разреженных матричных АР с применением алгоритма,
использующего расчеты во временной области: конфигурация № 1 (а); конфигурация № 2 (б); конфигурация № 3 (в);
конфигурация № 4 (г); конфигурация № 5 (д).
На рис. 5 и 6 представлены проекции изображений дефекта на плоскость XY, полученные с при-
менением алгоритма на основе НБПФ и алгоритма, использующего расчеты во временной области.
Рис. 5 содержит результаты обработки сигналов матричных АР различных конфигураций при ис-
пользовании алгоритма на основе НБПФ. Аналогичные результаты для алгоритма, использующего
расчеты во временной области, представлены на рис. 6.
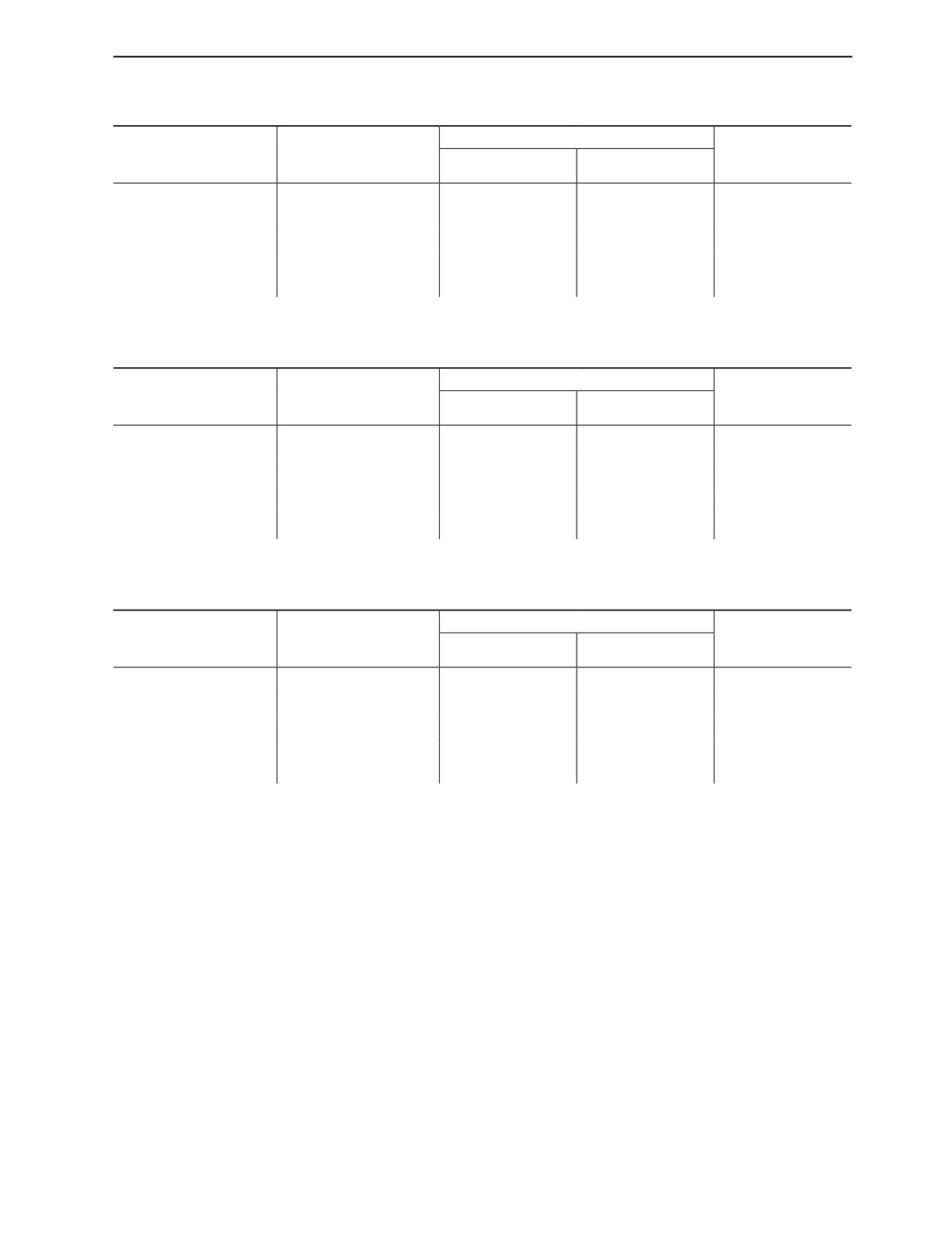
На следующем этапе проводилась оценка времени, затраченного на восстановление трехмер-
ных результатов, а также определялись значения API, ОСШ и контраста в соответствии с форму-
лами (14)—(16). Результаты оценки величины API для алгоритма на основе НБПФ и алгоритма,
использующего расчеты во временной области, представлены в табл. 1. Результаты оценки ОСШ
и контраста для двух рассмотренных алгоритмов представлены в табл. 2 и 3 соответственно. В
табл. 4 представлены временные значения, затраченные на восстановление изображений дефекта
при различных конфигурациях используемых разреженных матричных АР с применением рас-
смотренных алгоритмов.
Таблица
1
Значения API полученных результатов
Значения API
№ конфигурации
Количество активных
Разница, %
матричной АР
элементов
Алгоритм на основе
Временной алгоритм
НБПФ
1
64
1,58
1,62
2,5
2
56
1,66
1,68
1,2
3
48
1,69
1,72
1,7
4
40
1,70
1,74
2,3
5
32
1,72
1,75
1,7
Таким образом, разница в оценке значений API, полученных при использовании алгоритма на
основе НБПФ и алгоритма, использующего расчеты во временной области, для обработки одного и
Дефектоскопия
№ 5
2023
Ультразвуковая томография с применением разреженных матричных антенных решеток...
9
Таблица
2
Значения ОСШ полученных результатов
ОСШ, дБ
№ конфигурации
Количество активных
Разница, дБ
матричной АР
элементов
Алгоритм на основе
Временной алгоритм
НБПФ
1
64
27,2
26,8
0,4
2
56
26,4
26,2
0,2
3
48
26,2
26,0
0,2
4
40
23,7
22,9
0,8
5
32
23,1
21,9
1,2
Таблица
3
Значения контраста полученных результатов
Значения контаста
№ конфигурации
Количество активных
Разница, %
матричной АР
элементов
Алгоритм на основе
Временной алгоритм
НБПФ
1
64
0,96
0,95
0,22
2
56
0,95
0,95
0,12
3
48
0,95
0,95
0,12
4
40
0,93
0,93
0,68
5
32
0,93
0,92
1,13
Таблица
4
Значения времени, затраченного на восстановление изображений
Затраченное время, с
№ конфигурации
Количество активных
Разница, %
матричной АР
элементов
Алгоритм на основе
Временной алгоритм
НБПФ
1
64
1,35
2,27
48,9
2
56
1,14
1,75
44,0
3
48
0,90
1,31
41,2
4
40
0,69
0,93
36,6
5
32
0,49
0,61
31,1
того же набора сигналов, не превышала 2,5 %. При этом разница в значений ОСШ, полученных для
рассмотренных алгоритмов, не превышала 1,2 дБ при максимальной разнице в контрасте изобра-
жений 1,13 %. Исходя из полученных результатов, можно сделать вывод о сходном качестве полу-
чаемых изображений при использовании алгоритма на основе НБПФ и алгоритма, использующего
расчеты во временной области при более высокой скорости работы алгоритма на основе НБПФ.
При этом алгоритм на основе НБПФ обеспечил восстановление изображений с более высокой ско-
ростью для всех наборов сигналов, полученных с использованием различных конфигураций ма-
тричных АР.
ЗАКЛЮЧЕНИЕ
В данной работе был рассмотрен алгоритм, использующий расчеты в частотной области и
обеспечивающий цифровую когерентную обработку сигналов разреженных матричных АР. Дан-
ный алгоритм базируется на применении НБПФ, что позволяет учесть расположение данных
разреженных матричных АР на неравномерной сетке. Рассмотренный алгоритм был реализован
в программном пакете Matlab, для оценки его эффективности применялись натурные экспери-
менты. В рамках натурных экспериментов рассматривались различные конфигурации матрич-
ных АР, сигналы которых подвергались цифровой когерентной обработке с использованием ал-
Дефектоскопия
№ 5
2023
10
Д.О. Долматов, А.Р. Хайруллин, В.А. Смолянский
горитма на основе НБПФ для получения результатов в форме трехмерных изображений дефекта
в участке тестового образца. Полученные результаты сравнивали с аналогичными результатами,
полученными при применении алгоритма, использующего расчеты во временной области. Срав-
нительный анализ показал, что при использовании одного набора данных матричных АР различ-
ной конфигурации алгоритм на основе НБПФ и алгоритм, использующий расчеты во временной
области, обеспечивают получение результатов со сходным разрешением, ОСШ и контрастом.
Разница в значении API, использованного для оценки разрешения результатов цифровой коге-
рентной обработки двух алгоритмов, не превышала 2,5 %. При этом разница в ОСШ изобра-
жений во всех случаях не превышала 1,2 дБ. Разница в контрасте изображений, полученных с
использованием алгоритма на основе НБПФ и алгоритма, использующего расчеты во временной
области, для различных конфигураций матричных АР не превышала 1,13%. При этом во всех
случаях алгоритм на основе НБПФ обеспечил более высокую скорость восстановления трех-
мерных результатов.
Полученные результаты могут служить заделом для дальнейших исследований и разрабо-
ток. Использование алгоритма на основе НБПФ будет наиболее эффективным при использова-
нии разреженной матричной АР оптимальной конфигурации. В этом случае предполагается,
что активные элементы преобразователя будут обеспечивать формирование функции рассея-
ния точки без побочных дифракционных максимумов, низким уровнем боковых лепестков и
узким главным лепестком, что обеспечит получение результатов высокого качества (с высоким
разрешением, контрастом и ОСШ). Таким образом, представляет интерес разработка подходов
по определению оптимальной конфигурации разреженной матричной АР в зависимости от ус-
ловий проведения ультразвукового контроля. Другим направлением дальнейших исследований
и разработок является аппаратная оптимизация алгоритма на основе НБПФ, что включает в
себя перенос вычислений в рамках алгоритма на графические процессоры или программируе-
мые логические интегральные схемы.
Исследование выполнено за счет гранта Российского научного фонда № 22-79-00244, http://rscf.
ru/project/22-79-00244/
СПИСОК ЛИТЕРАТУРЫ
1. Holmes C., Drinkwater B., Wilcox P. The post-processing of ultrasonic array data using the total focusing
method // Insight-Non-Destructive Testing and Condition Monitoring. 2004. V. 46. No. 11. P. 677—680.
2. Базулин Е.Г. Сравнение систем для ультразвукового неразрушающего контроля, использующих
антенные решетки или фазированные антенные решетки // Дефектоскопия. 2013. № 7. С. 51—75.
3. Самокрутов А.А., Шевалдыкин В.Г. Ультразвуковая томография металлоконструкций методом
цифровой фокусировки антенной решетки // Дефектоскопия. 2011. № 1. С. 21—38.
4. Von Bernus L., Bulavinov A., Dalichow M., Joneit D., Kröning M., Reddy K. Sampling phased array —
a new technique for signal processing and ultrasonic imaging // Insight. 2006. No. 48 (9). P. 545—549.
5. ISO 23864:2021. Non-destructive testing of welds — Ultrasonic testing — Use of automated total
focusing technique (TFM) and related technologies.
6. ISO 23865:2021. Non-destructive testing — Ultrasonic testing — General use of full matrix capture/
total focusing technique (FMC/TFM) and related technologies11. Real-time 3D imaging with Fourier-domain
algorithms and matrix arrays applied to non-destructive testing.
7. Базулин Е.Г. Ультразвуковой контроль на однократно отраженном луче с использованием про-
реженных антенных решеток и трехмерной обработки эхосигналов // Дефектоскопия. 2016. Т. 1. №. 1.
С. 3—17.
8. Hu H., Du J., Ye C., Li X. Ultrasonic phased array sparse-TFM imaging based on sparse array optimization
and new edge-directed interpolation // Sensors. 2018. V. 18. No. 6. Art. number: 1830.
9. Zhang H., Bai B., Zheng J., Zhou Y. Optimal design of sparse array for ultrasonic total focusing method
by binary particle swarm optimization // IEEE Access. 2020. V. 8. P. 111945—111953.
10. Hunter A.J., Drinkwater B.W., Wilcox P.D. The wavenumber algorithm for full-matrix imaging using
an ultrasonic array // IEEE transactions on ultrasonics, ferroelectrics, and frequency control. 2008. V. 55.
№. 11. P. 2450—2462.
11. Zhuang Z., Zhang J., Lian G., Drinkwater B. W. Comparison of time domain and frequency-wavenumber
domain ultrasonic array imaging algorithms for non-destructive evaluation // Sensors. 2020. V 20 (17).
Art. number: 4951.
12. Marmonier M., Robert S., Laurent J., Prada C. Real-time 3D imaging with Fourier-domain algorithms
and matrix arrays applied to non-destructive testing // Ultrasonics. 2022. V. 124. Art. number. 106708.
13. Долматов Д.О., Седнев Д.А., Булавинов А.Н., Пинчук Р.В. Применение алгоритма расчета в ча-
стотной области для ультразвуковой томографии слоисто неоднородных сред с использованием матрич-
ных антенных решеток // Дефектоскопия. 2019. № 7. С. 12—19.
Дефектоскопия
№ 5
2023
Ультразвуковая томография с применением разреженных матричных антенных решеток...
11
14. Dolmatov D.O., Salchak Y.A., Pinchuk R. Frequency-domain imaging algorithm for ultrasonic testing
by application of matrix phased arrays // MATEC Web of Conferences. 2017. V. 102. Art. number. С. 1015.
15. Долматов Д.О., Ермошин Н.И. Цифровая когерентная обработка сигналов с расчетами в частот-
ной области для решения задач ультразвуковой томографии с применением матричных антенных реше-
ток с неэквидистантным расположением элементов // Дефектоскопия. 2022. № 10. С. 13—26.
16. Greengard L., Lee J.Y. Accelerating the nonuniform fast Fourier transform // SIAM review. 2004.
V. 46. No. 3. P. 443—454.
17. Базулин Е.Г., Коколев С.А., Голубев А.С. Применение ультразвуковой антенной решетки для реги-
страции эхосигналов методом двойного сканирования для получения изображений дефектов // Дефек-
тоскопия. 2009. № 2. С. 18—32.
18. Holmes C., Drinkwater B.W., Wilcox P.D. Post-processing of the full matrix of ultrasonic transmit-
receive array data for non-destructive evaluation // NDT & E International. 2005. V. 38 (8). P. 701—711.
19. Fan C., Caleap M., Pan M., Drinkwater B.W. A comparison between ultrasonic array beamforming
and super resolution imaging algorithms for non-destructive evaluation // Ultrasonics. 2014. V. 54. No. 7.
P. 1842—1850.
20. Zhang J., Drinkwater B.W., Wilcox P.D., Hunter A.J. Defect detection using ultrasonic arrays:
The multi-mode total focusing method // NDT&E International. 2010. V. 43. P. 123—133.
Дефектоскопия
№ 5
2023