Электромагнитные методы
УДК 620.179.14
АЛГОРИТМЫ ГИСТЕРЕЗИСНОЙ ИНТЕРФЕРЕНЦИИ
© 2023 г. В.В. Павлюченко1,*, Е.С. Дорошевич1,**
1Белорусский Национальный Технический Университет,
Беларусь 220013 Минск, пр-т Независимости, 65
E-mail: *vv.pavlyuchenko@gmail.com; **es_doroshevich@mail.ru
Поступила в редакцию 20.03.2023; после доработки 07.04.2023
Принята к публикации 07.04.2023
Представлены расчетные распределения величины электрического напряжения U на выходе магнитной головки
(МГ), сканирующей магнитный носитель (МН), по координате x. Найдены координаты и амплитуды первых максиму-
мов гистерезисной интерференции (HI), полученной в импульсном магнитном поле. Предложены расчеты с много-
кратным использованием начальной ветви остаточного намагничивания МН при построении гистерезисной интерфе-
ренции. Проведен анализ начальной и гистерезисных ветвей сигналов для МН и других носителей информации,
преобразователей сигналов и систем контроля. Использование полученных результатов позволяет повысить качество
контроля свойств материалов и объектов.
Ключевые слова: импульсное магнитное поле, магнитный носитель, гистерезисная интерференция.
DOI: 10.31857/S0130308223050032, EDN: ZCAUJP
ВВЕДЕНИЕ
Использование гистерезисной интерференции (HI) позволяет повысить точность контроля
толщины металлических объектов, их удельной электропроводности и дефектов сплошности в
них [1, 2]. Толщину объектов из алюминия можно определять при воздействии на них сериями
разнополярных импульсов [1] с обеспечением одинаковой амплитуды гистерезисных колебаний
электрического напряжения, снимаемого с магнитной головки. Применение перекрывающихся
во времени импульсных магнитных полей [2] увеличивает скорость записи распределений маг-
нитных полей и позволяет производить контроль в динамическом режиме. Учет параметров
дифференциального фона [3] дает возможность выделять полезный сигнал из полного сигнала,
содержащего фон электромагнитных помех, фон резонансных явлений в измерительной цепи и
фоны других сигналов. Повышение производительности контроля и его возможностей могут
быть достигнуты при использовании перемещаемых индукторов импульсных магнитных полей
[4]. Контроль толщины объектов из электропроводящих материалов, их электропроводности,
толщины покрытий, параметров дефектов сплошности достаточно точно осуществляют также
вихретоковым [5—11], магнитодинамическим [12] и другими методами. В [5—11] описаны алго-
ритмы обработки сигналов, контроль внутренних диаметров труб, шаровых включений, толщи-
ны покрытий, трещин в объектах, а также использование проекционных методов анализа. Поле
электропроводящего объекта может быть представлено в виде суперпозиции полей элементар-
ных вихревых токов [13], а результаты магнитной дефектоскопии обработаны в масштабе реаль-
ного времени [14]. Способ оценки параметров дефектов в стали рассмотрен в [15], а применение
виброиндукционного преобразователя для исследования магнитных потоков рассеяния поверх-
ностного дефекта изучены в [16]. Для проведения исследований авторами использованы также
основополагающие работы по магнитографической дефектоскопии [17, 18].
Одним из главных преимуществ метода гистерезисной интерференции является обеспечение
записи мгновенных распределений магнитных полей на значительных площадях при высоком про-
странственном разрешении, а в случае использования визуализирующих пленок — проведение
процесса контроля в режиме, близком к режиму реального времени.
Целью работы является повышение качества контроля свойств материалов и объектов.
Поставленная цель достигается путем нахождения координат и амплитуд первых максимумов
гистерезисной интерференции в импульсном магнитном поле, разработкой методов расчета с
многократным использованием начальной ветви остаточного намагничивания МН при построе-
нии гистерезисной интерференции, проведением анализа начальной и гистерезисных ветвей
сигналов для МН и других носителей информации, преобразователей сигналов и систем контро-
ля.
22
В.В. Павлюченко, Е.С. Дорошевич
ОСНОВНЫЕ РЕЗУЛЬТАТЫ
При использовании гистерезисной интерференции для контроля свойств объектов могут быть
разработаны алгоритмы различных операций. Так, в случае метода нулевого центрального макси-
мума [19] находят последовательности импульсов с заданными параметрами, которые обеспечива-
ют максимальную чувствительность определения искомых величин (толщины объекта, удельной
электропроводности его материала).
При этом задают порядок нулевого максимума, т.е. число перемагничиваний участка МН на
проекции локального источника магнитного поля.
Алгоритмы могут быть выражены последовательностью операций программы с предваритель-
ным нахождением функций или цифровых табличных данных распределения напряженности
магнитного поля в зависимости от вида источников поля, параметров импульсов, свойств объек-
тов, расстояний от источников до объектов и так далее.
Произведем расчеты гистерезисной интерференции электрического напряжения U, снимаемо-
го с магнитной головки (МГ), сканирующей магнитный носитель (МН). На МН воздействовали
импульсными магнитными полями линейного индуктора.
Начальную кривую U1i (H) применяемого МН, соответствующую начальной ветви остаточно-
го намагничивания носителя, для i-го импульса описывали найденной нами ранее [2] формулой:
U1i = 23,5 + 24,3arctg(0,011H1 - 1,45).
(1)
Электрическое напряжение выражено в милливольтах, а напряженность магнитного поля —
в А/см.
При намагничивании магнитного носителя вторым импульсом поля в обратном направлении
зависимость сигнала от величины напряженности магнитного поля и от результатов предшеству-
ющего воздействия находили по формуле [2]:
U2i = -23,5 + 0,61U1 + (24,5 + 0,4U1) arctg((0,011 + 0,000087U1) H2 + 1,45 - 0,0016U1). (2)
Значения U после воздействия третьим и последующими импульсами определяли по (2) с кор-
рекцией знаков и заменами U1 и H2 на их значения предыдущего импульса. Зависимость танген-
циальной составляющей напряженности магнитного поля линейного индуктора на плоскости
измерения, параллельной его оси, от расстояния x до проекции оси индуктора определяли по
формуле:
H = А/(x2 +b2),
(3)
где b — расстояние от этой оси до ее проекции на плоскость измерения. Расстояния x и b измеря-
ются в см, величина H — в A/см и коэффициент А — в A ∙ см.
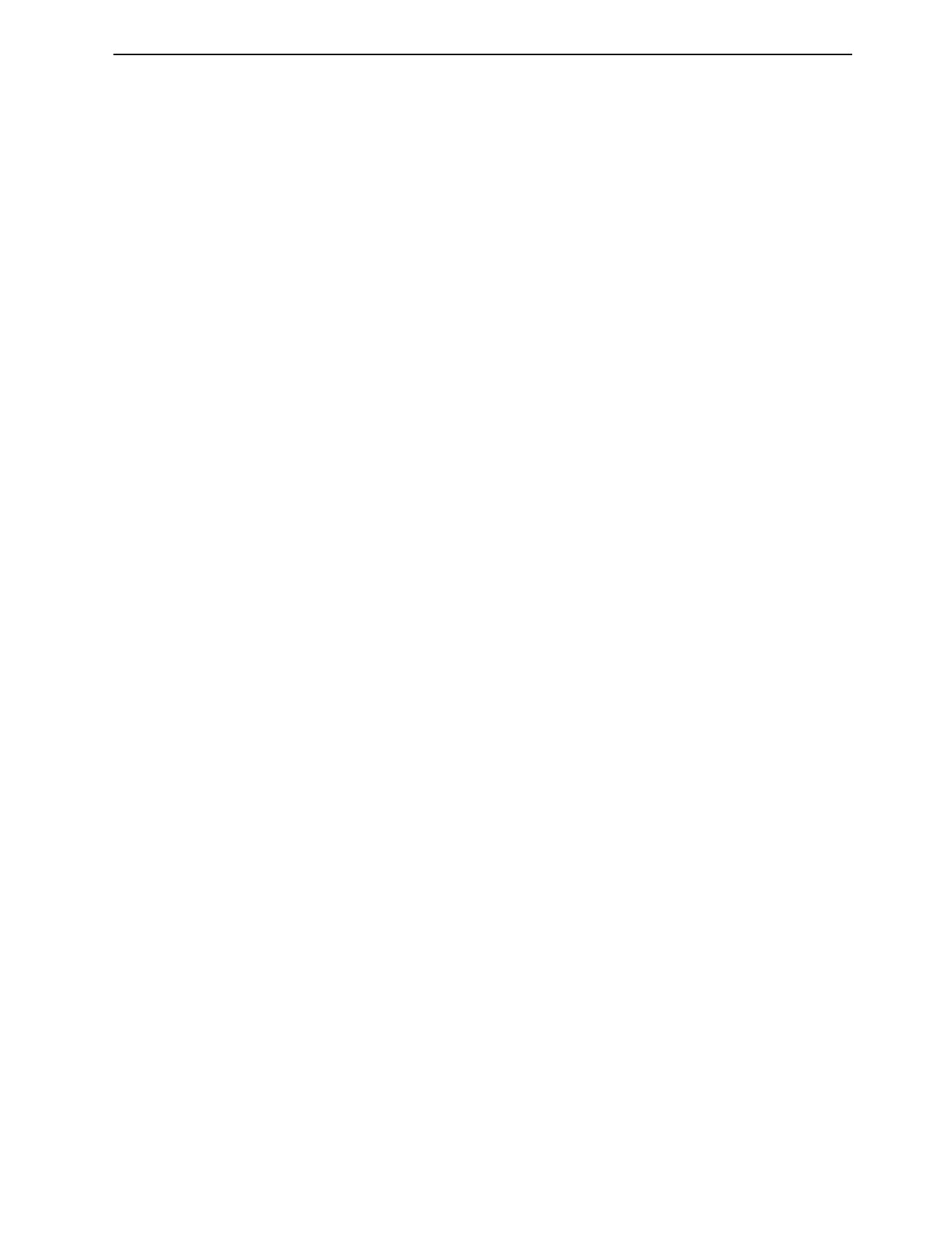
Пусть расстояние b = 0,6 см. Воздействуем на МН импульсом магнитного поля линейного
индуктора с величиной напряженности в прямом направлении H=400 А/см. После этого воздей-
ствуем на МН импульсами магнитного поля индуктора в обратном направлении и получим зави-
симости 1 — 11 электрического напряжения U(x), снимаемого с магнитной головки при сканиро-
вании ею МН, от координаты x, показанные на рис. 1.
Эти зависимости получены для разных величин напряженности обратного поля: 0 А/см (кривая
1); -25 А/см (кривая 2); -35 А/см (кривая 3); -45 А/см (кривая 4); -72 А/см (кривая 5);
−100 А/см (кривая 6); -128 А/см (кривая 7); -156 А/см (кривая 8); -183 А/см (кривая 9); -267 А/см
(кривая 10); -350 А/см (кривая 11). Здесь также отмечены точки на кривых, соответствующие пер-
вым максимумам интерференционной картины. Введенные нами параметры HI показаны в [19].
Из графиков на рис. 1 находим следующие положительные значения координаты x первого
максимума зависимостей: 3,8 ∙ 10-2 см (кривая 2); 0,25 см (кривая 3); 0,35 см (кривая 4); 0,45 см
(кривая 5); 0,55 см (кривая 6); 0,65 см (кривая 7); 0,7 см (кривая 8); 0,75 см (кривая 9); 1,2 см (кри-
вая 10); 2,2 см (кривая 11). Полученные зависимости координаты максимума x от величины напря-
женности обратного поля могут быть описаны аналитическими функциями с цифровыми данными
по точкам или представлены в табличном виде. Эти зависимости используют при создании алго-
ритмов HI для разных последовательностей импульсов.
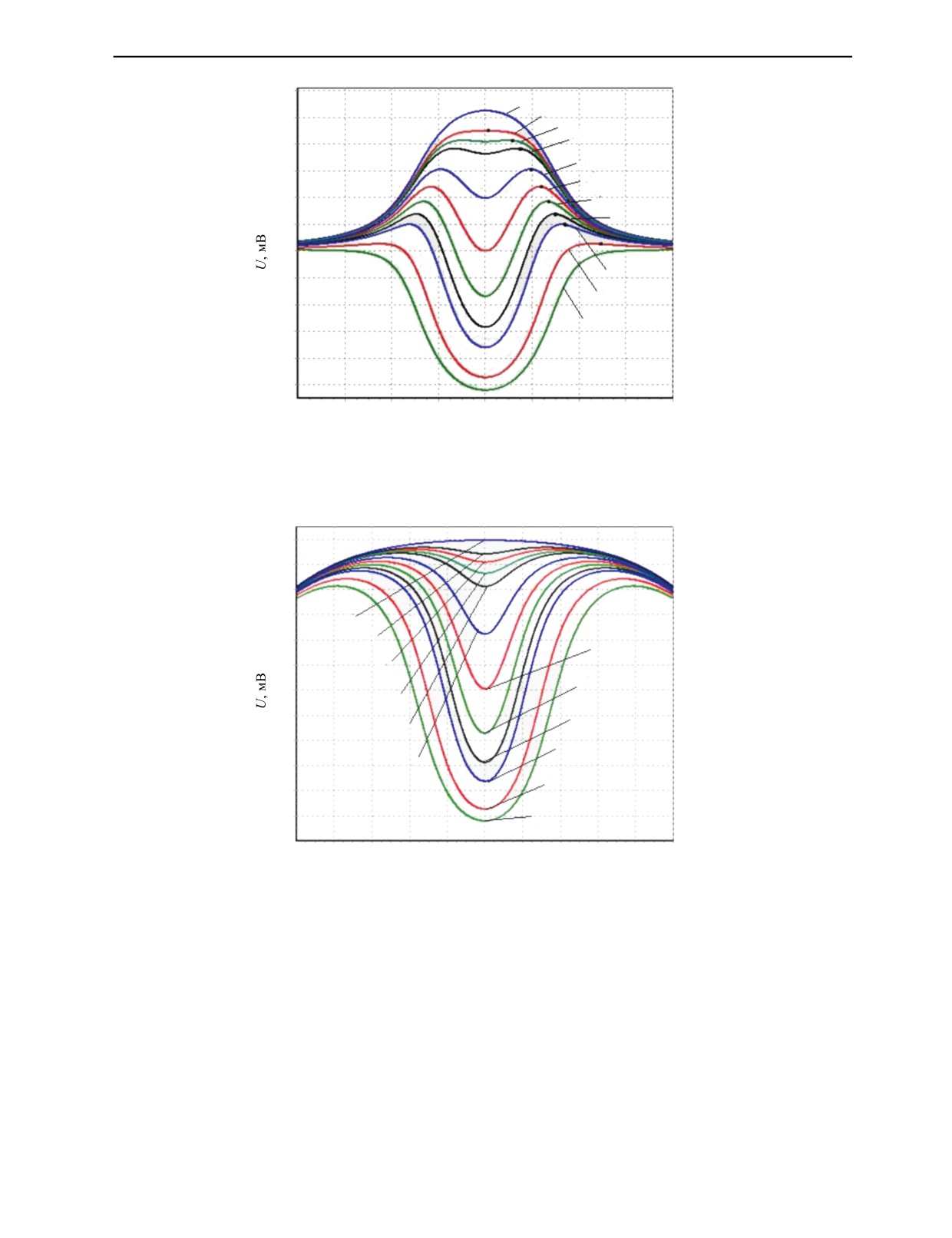
Воздействуем на МН импульсом магнитного поля линейного индуктора с величиной напря-
женности в прямом направлении H = 4000 А/см и получим зависимости U(x) при разных вели-
чинах напряженности обратного импульса, показанные на рис. 2: напряженность обратного
Дефектоскопия
№ 5
2023
Алгоритмы гистерезисной интерференции
23
60
1
2
50
34
40
5
30
6
20
7
8
10
0
9
-10
10
-20
11
-30
-40
-50
-1,5
-1
-0,5
0
0,5
1
1,5
2
x, см
Рис. 1. Зависимости U(x), полученные при разных величинах напряженности обратного импульса и напряженности
прямого импульса 400 А/см.
60
50
40
30
1
2
20
7
3
10
8
0
4
-10
9
5
-20
10
6
-30
11
-40
-50
12
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
x, см
Рис. 2. Зависимости U(x), полученные при разных величинах напряженности обратного импульса и напряженности
прямого импульса 4000 А/см.
поля 0 А/см (кривая 1); -17 А/см (кривая 2);
-25 А/см (кривая 3); -35 А/см (кривая 4);
-45 А/см (кривая 5); -72 А/см (кривая 6); -100 А/см (кривая 7); -128 А/см (кривая 8); -156 А/
см (кривая 9); -183 А/см (кривая 10); -267 А/см (кривая 11); -350 А/см (кривая 12).
Далее воздействуем на МН импульсом магнитного поля линейного индуктора с величиной
напряженности в прямом направлении H = 200 А/см и получим зависимости U(x) 1 — 11 при вели-
чинах напряженности обратного импульса, показанные на рис. 3: для напряженности обратного
поля 0 (кривая 1); -25 А/см (кривая 2); -35 А/см (кривая 3); -45 А/см (кривая 4); -72 А/см (кри-
вая 5); -100 А/см (кривая 6); -128 А/см (кривая 7); -156 А/см (кривая 8); -183 А/см (кривая 9);
-267 А/см (кривая 10); -350 А/см (кривая 11).
Распределения U(x) используют для составления алгоритмов HI при контроле объектов.
Дефектоскопия
№ 5
2023
24
В.В. Павлюченко, Е.С. Дорошевич
40
1
3
30
2
4
5
20
6
10
7
0
-10
8
-20
9
10
-30
11
-40
-50
-1,5
-1
-0,5
0
0,5
1
1,5
2
x, см
Рис. 3. Зависимости U(x), полученные при разных величинах напряженности обратного импульса и напряженности
прямого импульса 200 А/см.
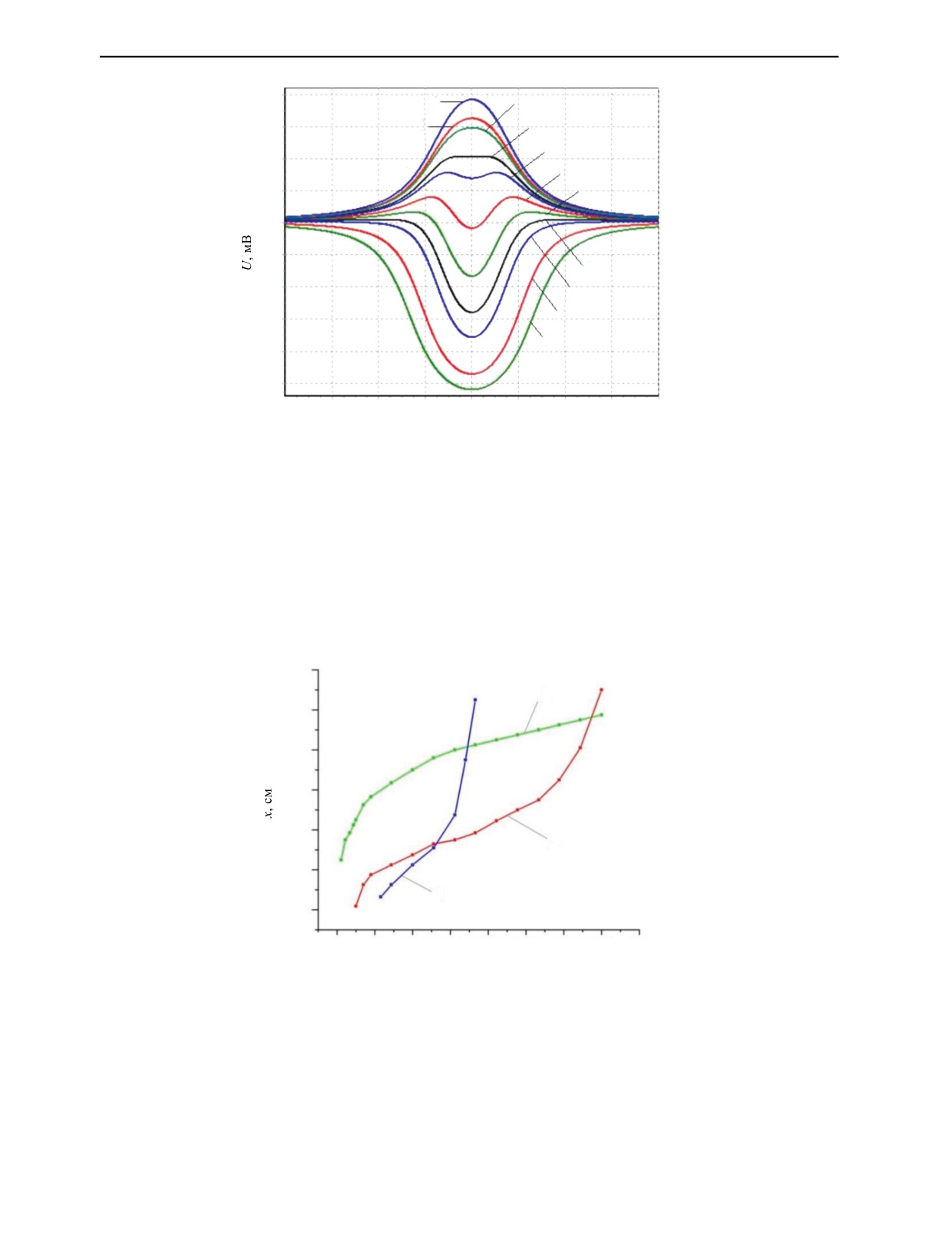
На основании графиков на рис. 1—3 построены зависимости координаты первого максимума
x от величины напряженности магнитного поля второго импульса Н 1, 2 и 3 (рис. 4) при макси-
мальной величине напряженности магнитного поля первого импульса 200, 400 и 4000 А/см соот-
ветственно. Величина напряженности второго импульса взята со знаком «-», так как напряжен-
ность магнитного поля направлена противоположно напряженности первого импульса.
2,4
3
2,0
1,6
1,2
0,8
2
0,4
1
0,0
0
50
100
150
200
250
300
350
400
−H, А/см
Рис. 4. Зависимости координаты x первого максимума от величины напряженности -H магнитного поля второго импуль-
са для напряженности прямого импульса: 200 (1), 400 (2) и 4000 А/см (3).
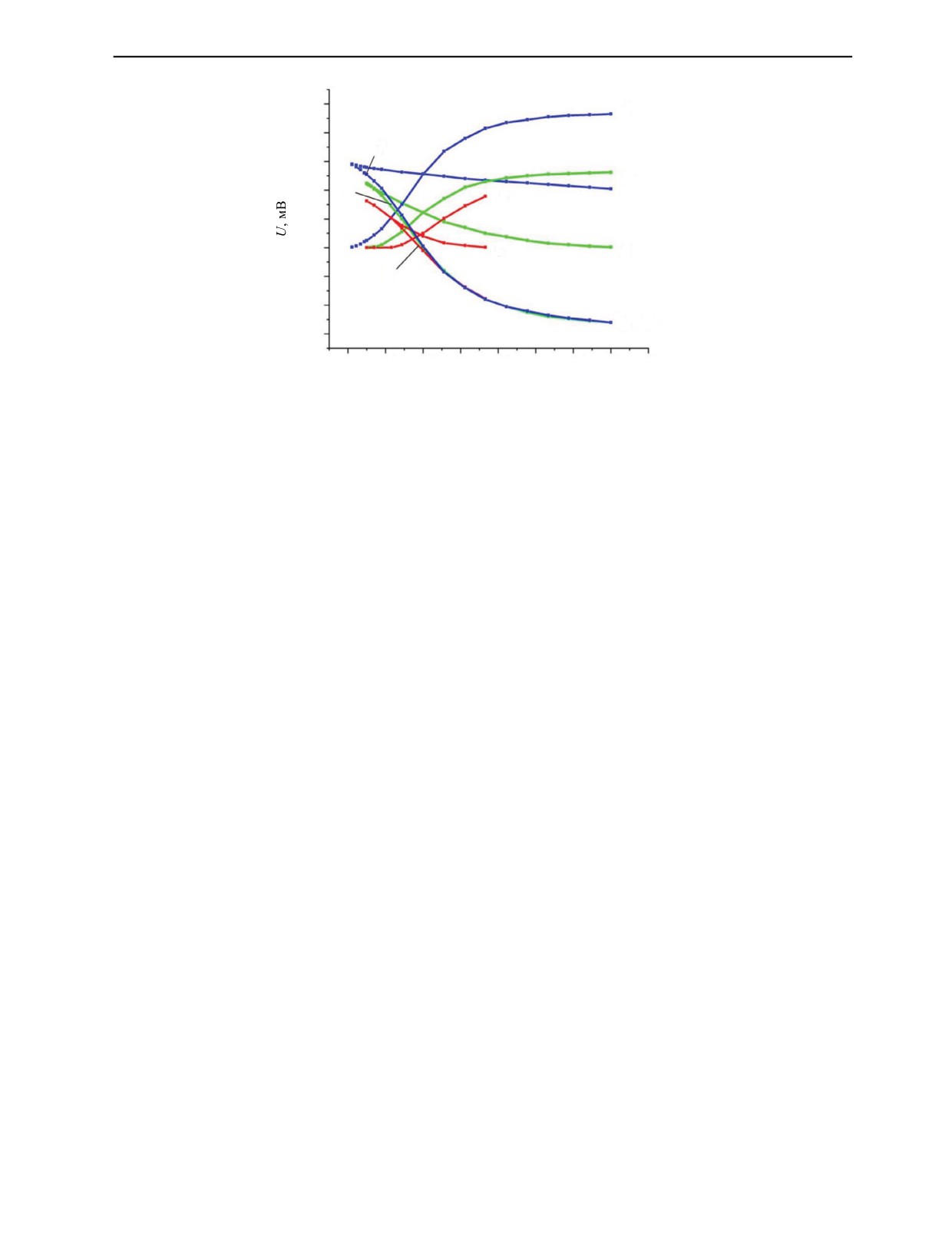
На рис. 5 показаны зависимости 1—9 величины электрического напряжения, снимаемого с МГ,
от величины напряженности магнитного поля обратного импульса для разных напряженностей
прямого импульса. Величина сигнала U пропорциональна величине остаточного магнитного поля
над участками МН, которая пропорциональна остаточной намагниченности этих участков.
Дефектоскопия
№ 5
2023
Алгоритмы гистерезисной интерференции
25
100
1
80
7
60
2
40
8
3
4
20
0
5
6
-20
9
-40
7, 8, 9
-60
0
50
100
150
200
250
300
350
400
−H, А/см
Рис. 5. Зависимости U(-H) для напряженности прямого импульса: 4000 А/см (1, 3, 7); 400 А/см (2, 5, 8) и 200 А/см (4, 6, 9).
Зависимости 3, 5 и 6 соответствуют величине остаточной напряженности МН первого максимума
HI в результате воздействия на МН двумя импульсами магнитного поля. Зависимости 7, 8 и 9 соот-
ветствуют величине остаточной намагниченности нулевого максимума (минимума) в результате
этих воздействий, а зависимости 1, 2, 4 есть разностные характеристики кривых 3 и 7, 5 и 8, 6 и 9.
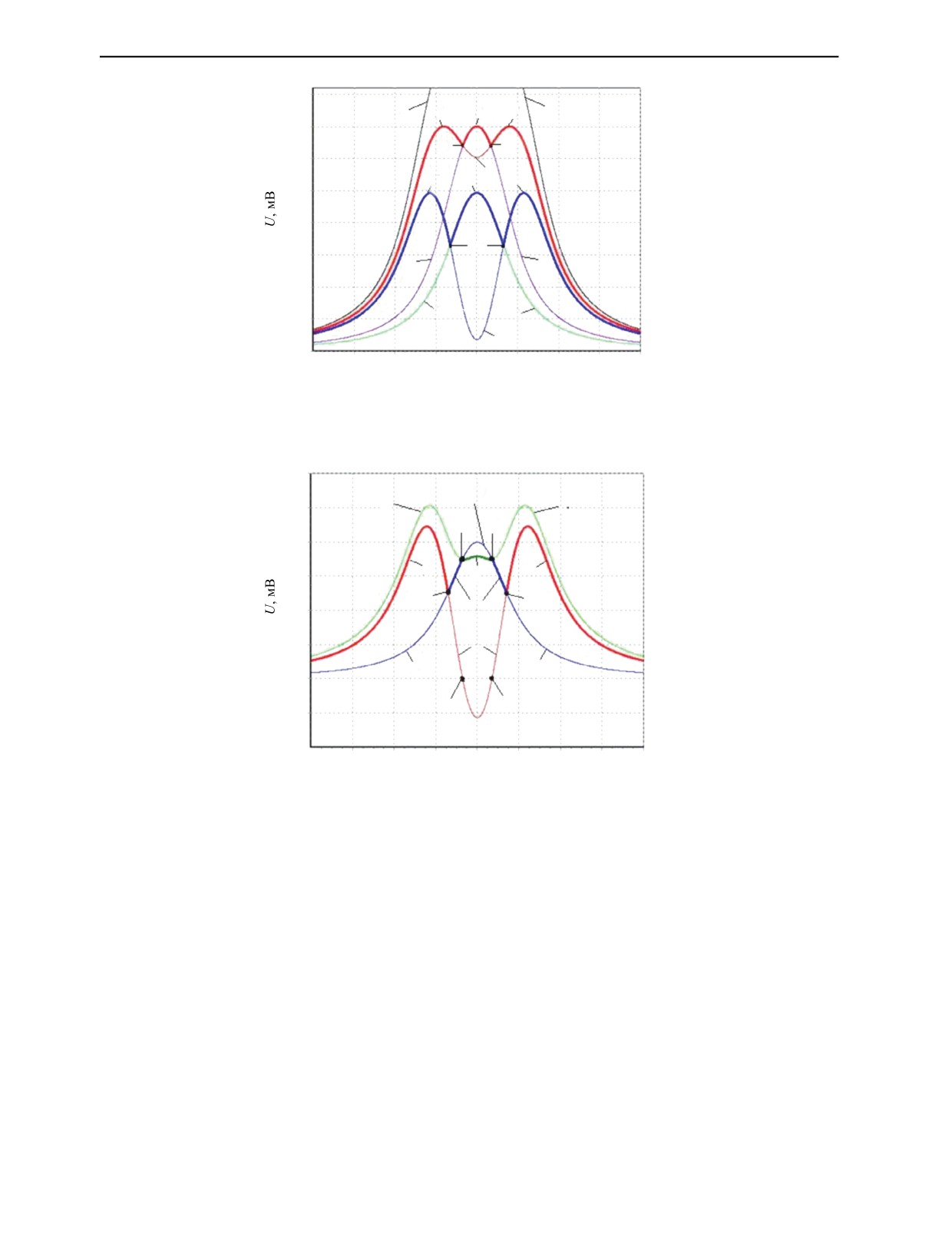
Проведем построения картин HI тремя импульсами (рис. 6, 7 и 8) и проанализируем разрабо-
танные нами методы их получения. На рис. 6 показаны такие распределения, для которых зависи-
мости U2i(x) второго импульса имеют только положительные значения. Обозначим через H1, H2 и
H3 напряженности магнитного поля первого, второго и третьего импульсов. Тогда получаем:
H11 = 144 / (x2 + 0,36);
(4)
H12= -35,08/ (x2 + 0,36);
(5)
H13 = 49 / (x2 + 0,36);
(6)
U11= 23,5 + 24,3 arctg (0,011 H11 - 1,45);
(7)
U12= -23,5+0,61 U11 + (24,5 + 0,40 U11) arctg ((0,011 + 0,000087 U11) H12 + 1,45 - 0,0016 U11); (8)
U13 = 23,5 + 24,3 arctg (0,011 H13 - 1,45).
(9)
Зависимости U11 соответствует кривая 1; U12 — кривая 2-3-2; U13 — кривая 4-5-4. Здесь также
обозначены точки сопряжения 10 зависимостей U12 и U13 и показана результирующая зависимость
2-5-2.
Для величин полей:
H21 = 144/(x2 + 0,36);
(10)
H 22 = -20,8/(x2 + 0,36);
(11)
H 23 = 64,2/(x2+ 0,36)
(12)
получаем кривые 1 (U21 та же, что и U11), 6-7-6 (U22), 8-9-8 (U23) и результирующую зависимость
6-9-6.
Зависимости U21, U22 и U23 рассчитаны по (7), (8), (9) с корректировкой индексов при U для
напряженности магнитных полей (10), (11), (12). Здесь точки 11 являются точками сопряжения
зависимостей U22 и U23.
Дефектоскопия
№ 5
2023
26
В.В. Павлюченко, Е.С. Дорошевич
40
1
5
1
2
2
35
10
10
30
3
6
9
6
25
20
11
15
4
4
10
8
8
5
7
0
-1,5
-1
-0,5
0
0,5
1
1,5
2
x, см
Рис. 6. Распределения U(x), полученные при воздействии на МН тремя импульсами магнитного поля; U12 ≥ 0.
30
7
25
3
3
9
9
20
1
1
15
4
10
10
6
10
5
2
5
5
0
8
8
-5
-1,5
-1
-0,5
0
0,5
1
1,5
2
x, см
Рис. 7. Распределения U(x), полученные при воздействии на МН тремя импульсами магнитного поля; -∞ ≤ U32 ≤ ∞.
Распределения U(x) трех импульсов, второе из которых U32, содержат как положительные, так
и отрицательные значения, показаны на рис. 7. Параметры полей H и сигналов U следующие:
H31 = 144/(x2 + 0,36);
(13)
H 32 = -39,08/(x2 + 0,36);
(14)
H 33 = 42,6/(x2 + 0,36);
(15)
U31 = 23,5 + 24,3arctg(0,011H31 - 1,45);
(16)
U32 = -23,5 + 0,61U31 + (24,5 + 0,40U31)arctg((0,011 + 0,000087U31)H 32 + 1,45 - 0,0016U31);
(17)
U33 = 23,5 - 0,61U32 + (24,5 + 0,40U32)arctg((0,011 + 0,000087U32)H33 - 1,45 + 0,0016U32);
(18)
Дефектоскопия
№ 5
2023
Алгоритмы гистерезисной интерференции
27
U34 = 23,5 + 24,3arctg(0,011H33 - 1,45).
(19)
Зависимость U32 содержит участки 1-2-1; U33 — участки 3-4-3; U34 — участки 5-6-7-6-5. Здесь
также отмечены общие точки кривых 8, 9 и 10.
Результирующая зависимость третьего импульса: 1-6-4-6-1. Точки 8 являются границами поло-
жительных и отрицательных значений распределения U(x) второго импульса. Им соответствуют
точки пересечения десяти зависимостей.
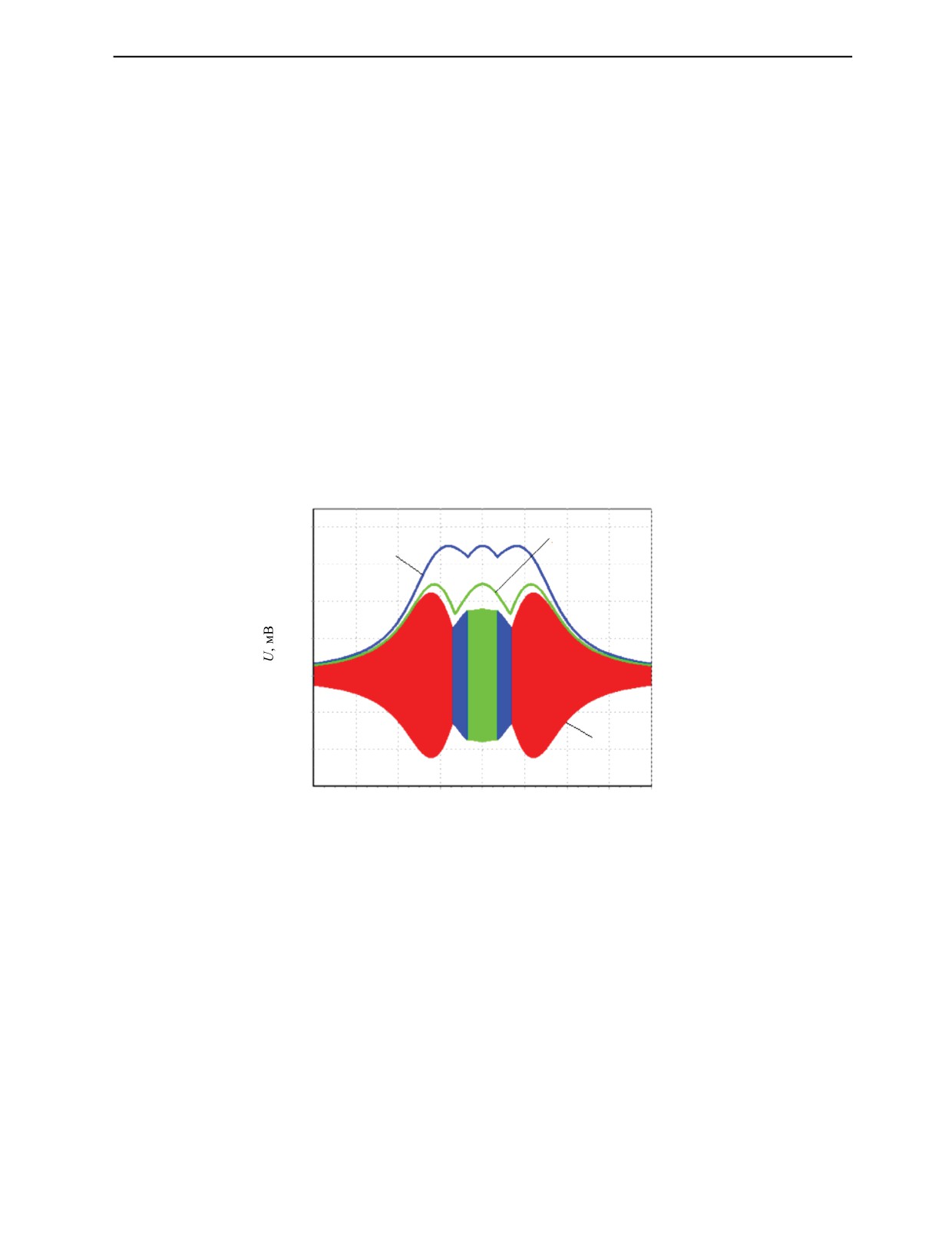
На основании графиков на рис. 6 и рис. 7 построены результирующие распределения 1 и 2 на
рис. 8, которые соответствуют распределению остаточной намагниченности МН, а также оптиче-
ское изображение сигнала 3. Кривым 1 и 2 на рис. 8 соответствуют участки распределений 2-5-2 и
6-9-6 на рис. 6, а верхней огибающей линии оптического изображения 3 соответствуют участки
распределения 1-6-4-6-1 на рис. 7.
Амплитуда (и размах) сигнала прямо пропорциональна величине остаточной намагниченности
МН.
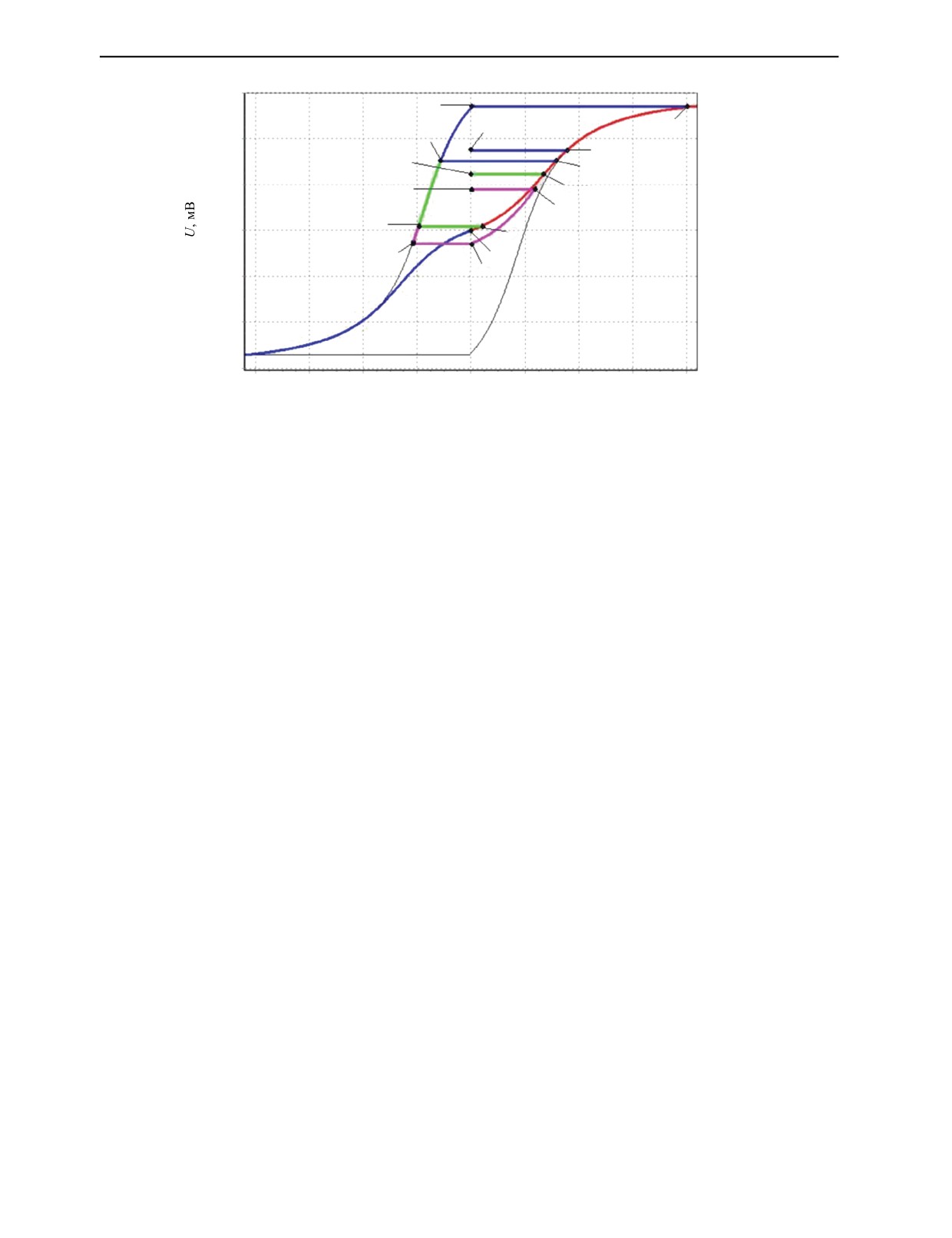
Гистерезисные циклы сигналов U(H) для указанных выше импульсов изображены на рис. 9.
Здесь показаны участки начальной и гистерезисных ветвей, по которым осуществлено движение
при формировании распределений на рис. 8. Распределение 1 (см. рис. 8) содержит точки 1-2-3-4-
5-6-7 на рис. 9, а распределение 2 (рис. 8) — точки 1-2-3-8-9-10-11 на рис. 9. Распределение 3 (верх-
няя огибающая линия оптического изображения, см. рис. 8) находим по точкам 1-2-3-12-13-14-15
на рис. 9.
40
2
1
30
20
10
0
-10
3
-20
-1,5
-1
-0,5
0
0,5
1
1,5
2
x, см
Рис. 8. Распределения U(x) результирующего сигнала 1, 2 и оптическое изображение сигнала 3.
На основании проведенных исследований нами установлены следующие правила построения
картины гистерезисной интерференции.
Продолжением цикла третьего (прямого) импульса для положительных значений сигнала вто-
рого (обратного) импульса является прямая начальная ветвь, а для отрицательных — прямая гисте-
резисная ветвь.
Для этого определяют границы области отрицательных значений сигнала второго (обратного)
импульса и строят внутри этих границ распределения сигнала третьего (прямого) импульса по
положительной гистерезисной ветви.
Далее находят общие точки распределений второго (обратного) импульса и распределения
третьего (прямого) импульса, построенного для начальной ветви, участки которого оставляют
неизменными между этими точками и границами областей отрицательных значений сигнала.
Достраивают результирующее распределение, оставляя неизменными участки распределения
второго (обратного) импульса в областях за общими точками.
Дефектоскопия
№ 5
2023
28
В.В. Павлюченко, Е.С. Дорошевич
60
3
7
2
40
4
6
11
5
20
15
10
14
8
0
9
12
1
13
-20
-40
-60
-400
-300
-200
-100
0
100
200
300
400
H, А/см
Рис. 9. Зависимости U(H) для разных последовательностей импульсов.
Так, для распределений U(x) на рис. 7 границами отрицательных значений сигнала второго
импульса являются точки 8 (x1 = -0,18 см и x2 = 0,18 см) и соответствующие им точки 9.
Общими точками сигнала второго импульса и распределения третьего импульса, построенного
для начальной ветви, являются точки 10 (x3 = -0,35 см и x4 = 0,35 см).
Тогда в области x1 ≤ x ≤ x2 реализуется распределение U33 (18), в областях x3 ≤ x ≤ x1 и x2 ≤ x ≤ x4
действует распределение U34 (19), а в областях -∞ ≤ x ≤ x3 и x4 ≤ x ≤ ∞ остается распределение U32
(17).
Использование начальной ветви для положительных значений сигнала второго (обратного)
импульса обусловлено тем, что магнитное поле третьего (прямого) импульса направлено в ту же
сторону, что и остаточная намагниченность МН. Для того, чтобы прямым импульсом вывести МН
в состояние с большей намагниченностью, надо приложить поле, напряженность которого больше
напряженности магнитного поля, выводящего МН в это состояние из размагниченного состояния.
Найденные правила используют при построении картины HI каждого последующего импульса.
Исходное состояние МН, при котором величина сигнала, снимаемого с МГ, равна нулю
может быть достигнута разными способами. Например, путем перемагничивания МН в одно-
родном переменном магнитном поле с плавно убывающей амплитудой. Сигнал нулевого уровня
может быть получен на оси линейного индуктора в переменном магнитном поле с убывающей
амплитудой или при воздействии на МН разнополярными импульсами магнитного поля. В зави-
симости от параметров воздействия могут быть получены разные начальные ветви U(H) маг-
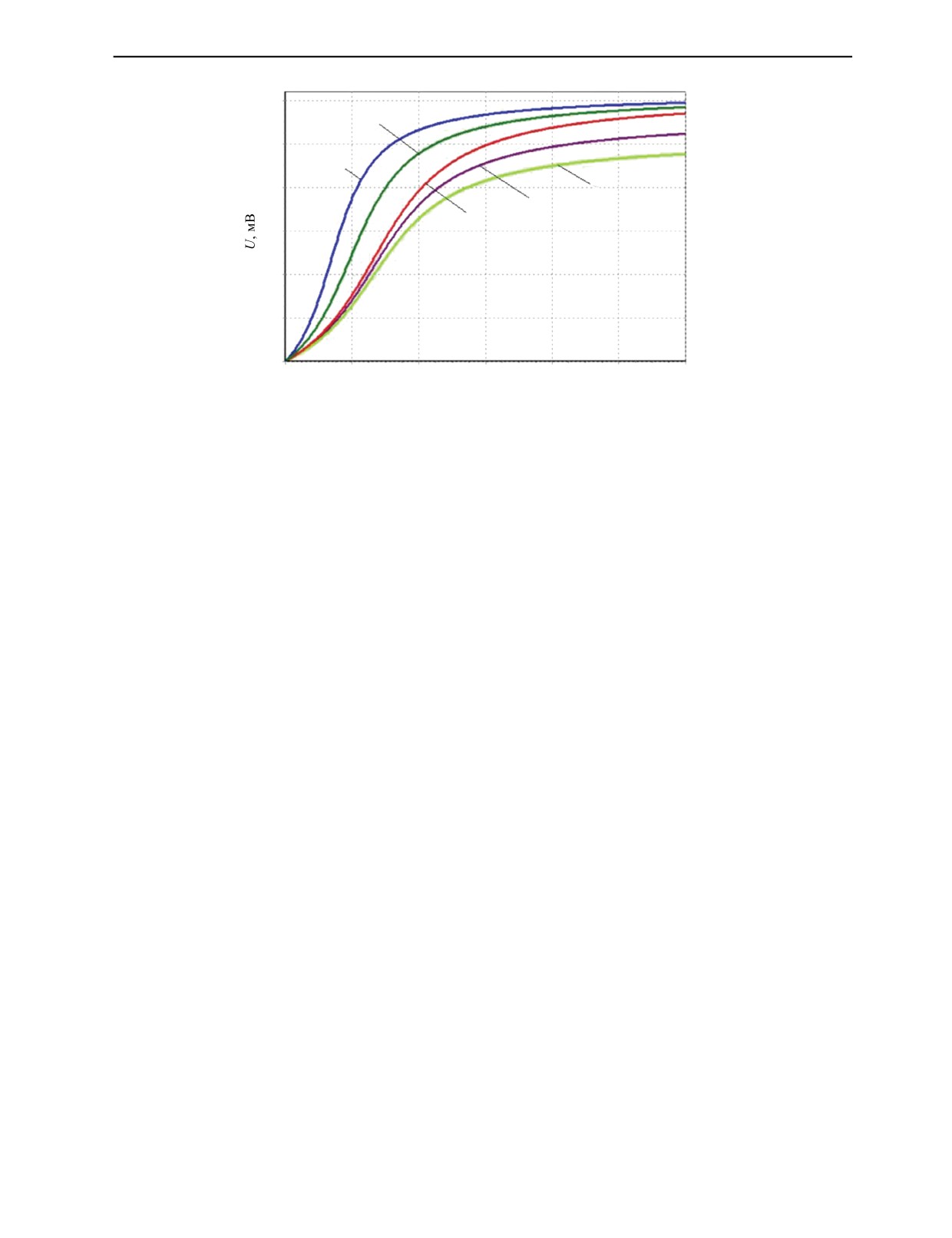
нитного носителя. В общем случае для разных носителей информации свойства начальной
ветви U(H) носителя информации зависят от числа однополярных импульсов и от времени tmax
их нарастания (рис. 10).
На рис. 10 показаны следующие начальные ветви U14 — U54:
U14 = 23,5 + 24,3arctg(0,021Н14 - 1,45);
(20)
U 24 = 23,5 + 24,3arctg(0,015Н24 - 1,45);
(21)
U 34 = 23,5 + 24,3arctg(0,011Н34 - 1,45);
(22)
U 44 = 21,6 + 22,3arctg(0,011Н44 - 1,45);
(23)
U 54 = 19,7 + 20,3arctg(0,011Н54 - 1,45).
(24)
Ветвь 1 (U14) получена для пяти импульсов, ветви 2 (U24) и 3 (U34) — соответственно для двух
и одного импульсов.
Дефектоскопия
№ 5
2023
Алгоритмы гистерезисной интерференции
29
60
2
50
1
40
5
4
3
30
20
10
0
0
100
200
300
400
500
600
H, А/см
Рис. 10. Начальные ветви U(H) для разных импульсов.
Ветви 3 (U34), 4 (U44) и 5 (U54) получены для разного времени нарастания импульсов в порядке
его уменьшения.
Из графиков на рис. 10 следует, что с увеличением числа воздействий импульсами с одинако-
выми параметрами на носитель информации увеличиваются углы наклона начальных ветвей. Для
носителя информации в виде пленочного флюкс-детектора зависимость сигнала от числа одинако-
вых импульсов получена нами ранее [20]. Там сигналом являлся яркостной сигнал оптического
изображения в отраженном свете, определяемый уровнем серого. Зависимости параметров началь-
ной ветви от числа импульсов получены нами также для МН при разных условиях воздействия.
Анализ ветвей 3—5 на рис. 10 показывает, что с уменьшением tmax уменьшаются как углы
наклона ветвей, так и предельная величина сигнала. Такие результаты получены нами для дис-
кретного датчика магнитного поля (ДДМП), состоящего из последовательности параллельных
полос МН [3], магнитооптических пленок и пленочных флюкс-детекторов.
Для достижения цели контроля могут быть составлены различные алгоритмы HI, определяю-
щие число максимумов и минимумов, их амплитуды и координаты. Отметим некоторые из них.
Так, задают параметры импульсов, обеспечивающих оптимальные величины следующих ампли-
туд и порядков максимумов HI:
1) амплитуды нулевых максимумов первого и второго порядков;
2) амплитуд всей последовательности нулевых максимумов первого, второго, … n-го порядка;
3) амплитуд нулевого, первого, …, n-го максимума всех порядков;
4) амплитуд нулевого максимума третьего порядка и первого максимума второго порядка;
5) амплитуд крайнего максимума первого порядка и амплитуды и порядка нулевого максимума.
Оптимальные параметры HI трех импульсов могут быть получены при амплитуде второго
импульса 10 мВ (см. зависимость 9 на рис. 1) и 3 мВ (см. зависимость 7 на рис. 3). Еще большие
возможности построения HI как по амплитуде, так и по протяженности контролируемого участка
дает использование зависимости 12 на рис. 2 с максимумом первого порядка 41 мВ. Этот макси-
мум может быть крайним не только при воздействии на МН двумя импульсами, но и большим
числом импульсов, в любом случае осуществляя контроль на участке -2,1 см
≤ x ≤ 2,1 см магнит-
ного носителя.
Для построения алгоритмов контроля могут быть использованы зависимости нулевого и пер-
вого максимумов от величины напряженности магнитного поля обратного импульса (см. рис. 5) и
зависимости координаты первого максимума от величины напряженности магнитного поля вто-
рого импульса (см. рис. 4).
Проведен анализ свойств начальной ветви U(H) разных МН и других носителей информации с
учетом явлений, определяющих эти свойства. К таким носителям относятся магнитооптические
пленки, визуализирующие магнитные поля пленочные флюкс-детекторы, преобразователи Холла,
индукционные катушки, магнитные и электрические зонды, сегнетоэлектрики и другие носители
Дефектоскопия
№ 5
2023
30
В.В. Павлюченко, Е.С. Дорошевич
с собственной памятью или с записью на дополнительные элементы памяти, например, на элек-
тронные элементы памяти. При этом сигнал преобразователей разного вида может быть представ-
лен в виде электрического напряжения или в виде интенсивности отраженного света с разным
уровнем серого или разными оттенками цветности. Этот сигнал может представлять любую дру-
гую величину, измеряемую непосредственно или определяемую по каким-либо формулам.
ВЫВОДЫ
На основании полученных распределений величины электрического напряжения U, снимаемо-
го с магнитной головки (МГ), считывающей информацию с магнитного носителя (МН) по коорди-
нате x, определены зависимости координаты и амплитуды первого максимума гистерезисной
интерференции (HI) от параметров воздействующих полей. На МН воздействовали двумя разно-
полярными импульсами магнитного поля. Начальная и гистерезисные ветви, т.е. зависимости
электрического напряжения от напряженности магнитного поля U(H), соответствующие остаточ-
ной намагниченности МН, представлены функциями арктангенс.
Представлены расчеты картины HI при воздействии на МН тремя и более импульсами магнит-
ного поля с повторными использованиями начальной ветви U(H), соответствующей начальной
ветви остаточного намагничивания МН. Показано, что построение HI каждого последующего
импульса следует осуществлять по начальной ветви U(H) или по гистерезисной ветви U(H) в зави-
симости от полярности сигнала, достигнутого в результате предшествующего импульса в конкрет-
ных точках зависимостей U(H). Найдены условия, при которых в результирующем распределении
остаются неизменными участки распределения второго (обратного) импульса.
Проведен анализ свойств начальной ветви U(H) разных МН и других носителей информации.
Полученные зависимости максимумов HI и найденные авторами методики построения карти-
ны HI с использованием начальной кривой U(H) и гистерезисных ветвей остаточного намагничи-
вания позволяют повысить качество контроля свойств материалов и объектов (повысить чувстви-
тельность и точность контроля толщины металлических объектов, электропроводности их матери-
ала и дефектов сплошности в них).
СПИСОК ЛИТЕРАТУРЫ
1. Pavlyuchenko V.V., Doroshevich E.S. Imaging Electric Signals of a Magnetic Field Transducer with
Hysteretic Interference for Testing Metals in Pulsed Magnetic Fields // Russian Journal of Nondestructive
Testing. 2020. V. 56. No. 11. P. 907—914.
2. Pavlyuchenko V.V., Doroshevich E.S. Hysteretic Interference of Time-Overlapping Magnetic Field
Pulses // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 12. P. 949—956.
3. Pavlyuchenko V.V., Doroshevich E.S. Differential Background of Electric Signal Readfrom an Induction
Magnetic Head // Russian Journal of Nondestructive Testing. 2021. V. 57. No. 8. P. 706—716.
4. Павлюченко В.В., Дорошевич Е.С. Гистерезисная интерференция магнитного поля перемещаемо-
го линейного индуктора // Дефектоскопия. 2020. № 1. С. 51—60.
5. Жданов А.Г., Щукис Е.Г., Лунин В.П., Столяров А.А. Алгоритмы предварительной обработки
вихретоковых сигналов при контроле теплообменных труб парогенераторов АЭС // Дефектоскопия.
2018. № 4. С. 54—64.
6. Киселев Е.К., Гольдштейн А.Е. Вихретоковая система контроля внутреннего диаметра труб //
Дефектоскопия. 2019. № 3. С. 25—30.
7. Печенков А.Н., Щербинин В.Е. Вихревые токи и поля проводящих и намагничивающихся шаро-
вых включений в немагнитную среду // Дефектоскопия. 2016. № 4. С.48—55.
8. Атавин В.Г., Узких А.А., Исхужин Р.Р. Отстройка от электропроводности основания при измере-
нии толщины токопроводящих покрытий методом вихревых токов // Дефектоскопия. 2018. № 1.
С. 58—64.
9. Шубочкин А.Е., Ефимов А.Г. Современные тенденции развития вихретоковой дефектоскопии и
дефектометрии // Контроль. Диагностика. 2014. № 3. С. 68—73.
10. Астахов В.И., Данилина Э.М., Ершов Ю.К. К вопросу о диагностике пластины с трещиной вих-
ретоковым методом // Дефектоскопия. 2018. № 3. С. 39—49.
11. Егоров А.В., Поляков В.В. Вихретоковый контроль металлических материалов с помощью про-
екционных методов многомерного анализа данных // Дефектоскопия. 2018. № 5. С. 55—62.
12. Лухвич А.А., Шарандо В.И., Шукевич А.К., Янушкевич К.И. Выявление ферромагнитной состав-
ляющей в нержавеющих сталях магнитодинамическим методом // Дефектоскопия. 2015. № 3. С. 3—10.
13. Суханов Д.Я., Завьялова К.В. Представление поля электропроводящего объекта в виде суперпо-
зиции полей элементарных вихревых токов и их томография // Известия вузов. Физика. 2017. Т. 60.
№ 11. С. 28—34.
Дефектоскопия
№ 5
2023
Алгоритмы гистерезисной интерференции
31
14. Печенков А.Н. Способ обработки результатов магнитной дефектоскопии для достоверного обна-
ружения опасных дефектов сплошности в реальном времени // Дефектоскопия.
2020.
№ 12.
С. 58—64.
15. Новослугина А.П., Смородинский Я.Г. Расчетный способ оценки параметров дефектов в стали
// Дефектоскопия. 2017. № 11. С. 13—19
16. Николаев Ю.Л., Шкатов П.Н., Чернова А.В. Исследование сигнала от тангенциальной состав-
ляющей магнитных потоков рассеяния поверхностного дефекта при его регистрации виброиндукци-
онным преобразователем // Дефектоскопия. 2018. № 5. С. 50—54.
17. Козлов В.С. Техника магнитографической дефектоскопии. Мн.: Вышэйшая школа, 1976. 256 с.
18. Михайлов С.П., Щербинин В.Е. Физические основы магнитографической дефектоскопии.
М.: Наука, 1992. 238 с.
19. Pavlyuchenko V.V., Doroshevich E.S. Using Film Flux Detectors to Determine Properties of
Conducting and Magnetic Objects // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 1.
P. 70—76.
20. Pavlyuchenko V.V., Doroshevich E.S. Testing for Discontinuities in Metals Using Film Flux //
Russian Journal of Nondestructive Testing. 2019. V. 55. No. 1. P. 48—58.
Дефектоскопия
№ 5
2023