УДК 620.179.148
АНАЛИЗ ПАРАМЕТРОВ, ВЛИЯЮЩИХ НА ЭФФЕКТИВНОСТЬ СИСТЕМЫ
ДВУХЭЛЕКТРОДНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ОБНАРУЖЕНИЯ
© 2023 г. Хун Чен1,*, Бинтинг Чжа1,**, Чэнцзюнь Ван1, Ци Чжун1
1Северный университет науки и технологий, Нанкин, 210094 Китай
E-mail: *cz_chenhong@126.com; **zhabingting@163.com
Поступила в редакцию 30.03.2023; после доработки 24.04.2023
Принята к публикации 26.04.2023
Данное исследование нацелено на изучение влияния различных параметров системы электростатической индук-
ции на измеряемые характеристики объекта при двухэлектродном электростатическом обнаружении. Основываясь на
принципе электростатической индукции, впервые была установлена модель системы и математическая модель для
одноэлектродного электростатического обнаружения. Проанализировано влияние различных факторов на ключевые
данные, получаемые при одноэлектродном электростатическом обнаружении. На его основе разработана новая
модель двухэлектродного электростатического обнаружения, обоснование такого метода подробно описано.
Проводилось сравнительное исследование с использованием теоретического и компьютерного моделирования.
Результаты показывают, что новая система двухэлектродного электростатического обнаружения показывает себя зна-
чительно лучше, чем ее одноэлектродный аналог. Также отмечается, что расстояние до заряженного объекта по вер-
тикали оказывает большее влияние на эффективность обнаружения по сравнению с интервалом между двумя электро-
дами. Более того, было обнаружено, что расстояние по вертикали и интервал между двумя электродами оказывают
гораздо более существенное влияние на эффективность электростатического обнаружения, чем какие-либо другие
факторы.
Ключевые слова: электростатическое обнаружение, система электростатической индукции, влияющие факторы,
компьютерное моделирование.
DOI: 10.31857/S0130308223060039, EDN: AADJCB
1. ВВЕДЕНИЕ
Статическое электричество возникает, когда различные вещества вступают в контакт, разделя-
ются или трутся друг о друга. Такие производственные процессы, как экструзия, резка, перемеши-
вание и фильтрация, могут генерировать статическое электричество. Учитывая, что оно может
стать причиной серьезных угроз безопасности на производстве, следует тщательно следить за
возможностью возникновения статического электричества. Последствия воздействия накопленно-
го статического электричества могут быть серьезными и привести к выходу из строя, взрывам и
пожарам дорогостоящих электронных устройств [1].
По мере развития науки и техники самолеты, высокоскоростные поезда и ракеты стали широко
использоваться в обществе. Во время полета летающие объекты в воздухе неизбежно заряжаются
статическим электричеством в результате различных процессов, таких как электризация трением,
индукционная электризация и плазменная электризация вследствие работы двигателя [2].
Установлено, что заряд реактивного самолета может достигать 10-3 С, в то время как заряд верто-
лета может достигать 10-6—10-4 С [3]. Это приводит к образованию детектируемого электростати-
ческого поля в диапазоне тысяч метров вокруг летающего объекта. Это поле обычно имеет потен-
циал в десятки тысяч вольт и даже может достигать 500 кВ. Это значение может быть измерено на
расстоянии тысяч метров [4]. Распространение движущихся объектов может быть обнаружено с
помощью их статических характеристик, а также получены соответствующие изменения параме-
тров в различных заряженных объектах, различных фоновых атмосферных электрических полях и
различных режимах при наличии шумов [5].
Электростатическое обнаружение — это метод получения необходимой информации об объ-
екте путем регистрации электростатического поля в окружающем пространстве [6]. Пассивная
бесконтактная технология электростатического обнаружения, в частности, определяет расстояние
до объекта, полагаясь на индуцированные заряды, возникающие на измерительном электроде под
воздействием электростатического поля объекта [7]. A. Kimoto и др. [8] использовали электроста-
тические датчики для контакта с материалами и добились эффективной идентификации конкрет-
ных материалов и их твердости по разнице в амплитуде индуцированного напряжения. Однако на
эффективность этого подхода влияют различные факторы, присущие системе электростатической
индукции. В данном исследовании рассматривается влияние этих факторов на эффективность
двухэлектродного электростатического обнаружения на основе модели электростатической систе-
Анализ параметров, влияющих на эффективность системы...
27
мы обнаружения и математической модели в соответствии с принципом электростатической
индукции. Также проводится сравнительное исследование между теорией и компьютерным моде-
лированием.
2. ПРИНЦИП ЭЛЕКТРОСТАТИЧЕСКОГО ОБНАРУЖЕНИЯ
Фундаментальный принцип, лежащий в основе электростатического обнаружения, связан с
явлением электростатической индукции. Согласно теории, когда металлический проводник нахо-
дится вблизи с заряженным объектом, на ближайшем к заряженному объекту конце проводника
индуцируется заряд, знак которого противоположен знаку заряда объекта, в то время как на другом
конце проводника индуцируется ровно такой же по модулю заряд, но противоположного знака. В
то же время поле системы заряженный объект—индуцированные заряды формирует полевое вза-
имодействие, которое перераспределяет заряды внутри проводника, пока они не придут в состоя-
ние электростатического равновесия. Такое перераспределение, как правило, происходит стреми-
тельно.
Согласно теореме Гаусса, легко рассчитать плотность заряда ρ в произвольной точке на поверх-
ности металлического проводника вблизи заряженного объекта [12]:
ρ = ε0E,
(1)
где ε0 — проницаемость вакуума; E — напряженность электрического поля.
Затем суммарное количество q индуцированных зарядов противоположного знака на ближней
к заряженному объекту стороне металлического проводника рассчитывается таким образом:
q= ∫ ε
EdS,
(2)
0
S
где S — площадь, на которой металлический проводник и заряженный объект обладают зарядами
противоположного знака.
Когда заряженный объект и металлический проводник движутся относительно друг друга,
относительное изменение электрического поля между ними вызывает изменение индуцированно-
го заряда в металлическом проводник. Такой заряд, в свою очередь, приводит к изменению элек-
трического тока. Уравнение для такого изменения тока выглядит как
dq
dE
i
=
=ε
dS
(3)
0
∫
dt
S
dt
Как можно видеть из формулы, электрический ток пропорционален изменению электрического
поля объекта. Следовательно, детектируя изменения электрического тока, возможно получать
информацию о движении заряженных объектов относительно металлического проводника.
3. СОЗДАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЭЛЕКТРИЧЕСКОГО ТОКА
ПРИ ЭЛЕКТРОСТАТИЧЕСКОМ ОБНАРУЖЕНИИ
Метод электростатического обнаружения связан с обнаружением изменений в электростатиче-
ском поле объекта контроля для получения достоверных данных. Чтобы облегчить этот процесс,
необходимо создать математическую модель, связанную с информацией об электрическом поле
объекта контроля [3]. Вышеупомянутый металлический проводник можно заменить бесконечно
тонкой индукционной электродной пластиной, которая по-прежнему удовлетворяет принципу
электростатической индукции.
3.1. Создание математической модели электрического тока при одноэлектродном
электростатическом обнаружении
В первую очередь была разработана математическая модель электрического тока при одноэлек-
тродном электростатическом обнаружении. При условии, что измерительная пластина сталкивает-
ся с заряженным объектом, идеальным маленьким шариком с зарядом Q, площадь индукционной
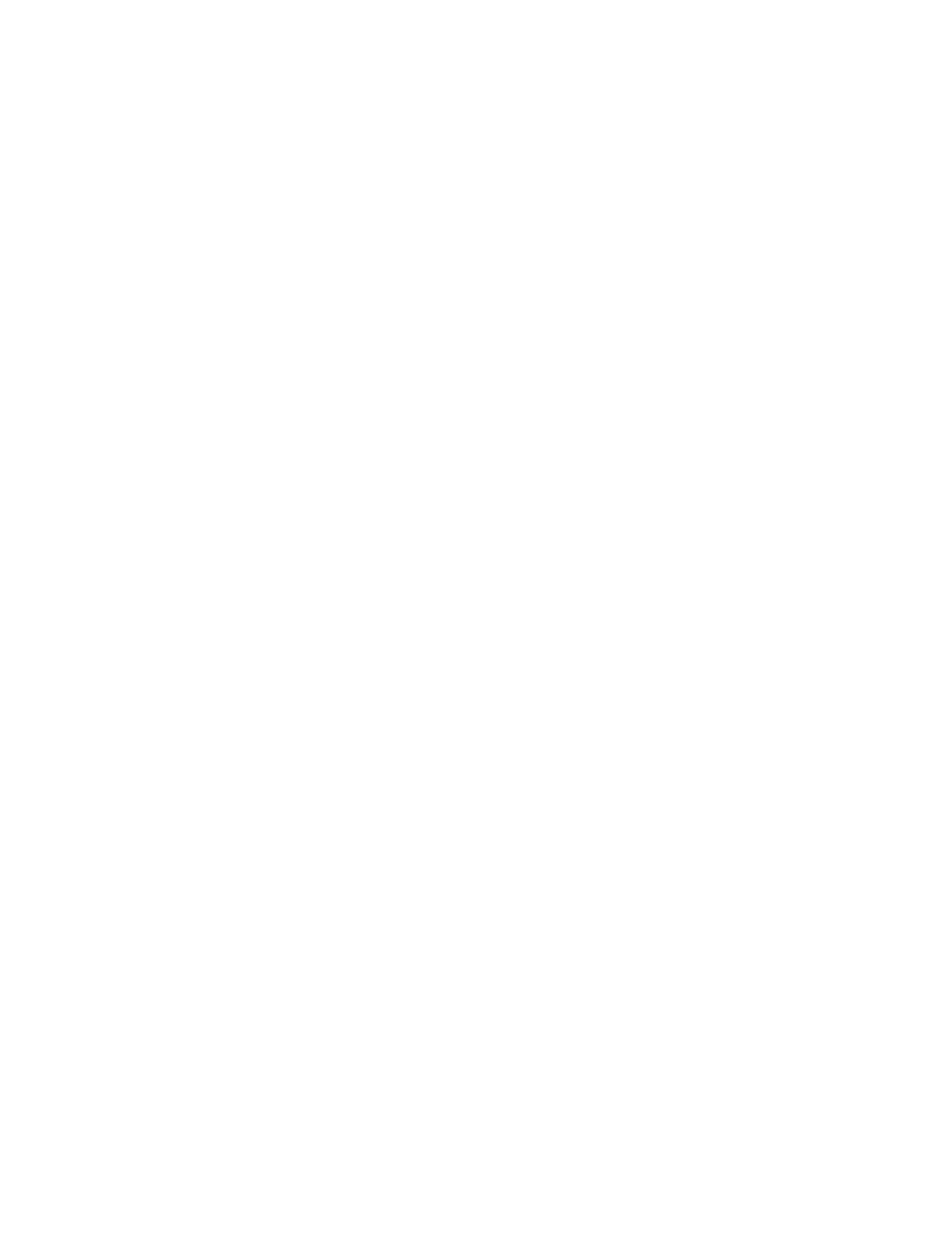
электродной пластины для электростатического обнаружения J1 равна S. Начальное положение
шарика x0, он движется горизонтально с относительной скоростью v; x — проекция перемещения
заряженного шарика относительно центральной точки электродной пластины; y — расстояние до
28
Хун Чен, Бинтинг Чжа, Чэнцзюнь Ван, Ци Чжун
x
x0
φ
en
y
J1
α
θ
Рис. 1. Схема расположения заряженного объекта и электродной пластины J1.
объекта; en — направление нормали к электродной пластине J1; θ — угол между поверхностью
электродной пластины и траекторией шарика, изменяющийся в диапазоне 0—90°. Схема располо-
жения заряженного объекта и электродной пластины J1 показана на рис. 1 [13].
Когда заряженный объект и чувствительная пластина движутся относительно друг друга, изме-
нение относительного электрического поля индуцирует изменение индуцируемого в электроде
заряда, что приводит к изменению тока. Таким образом, формула (3) может быть преобразована в
[14]:
dE
n
i
=ε
S
,
(4)
1
0
dt
где En — нормальная компонента напряженности поля в точке P.
Согласно закону Кулона, напряженность электростатического поля E вокруг заряженного объ-
екта определяется:
Q
E
=
;
(5)
2
2
4πε
0
(
x
+
y
)
En = Ecosα.
(6)
Из рис. 1 следует:
α = 90° - (φ + θ);
(7)
cosα = sinφ cosθ + cosφ sinθ,
(8)
y
x
где
sinφ=
,
cosφ=
2
2
2
2
x
+
y
x
+
y
Легко показать, что формулы (5) и (8) преобразуются в формулу (6):
Q
E
=
(xsinθ+
ycosθ);
(9)
n
2
2
32
4πε
(x
+
y
)
0
2
2
dE
Q
sinθ(y
−
2
x
) − 3xycosθ
dx
n
=
,
(10)
2
2
52
dt
4πε
(
x
+
y
)
dt
0
dx
где x = x0 + vt, затем подставляем
=
v
в формулу (10):
dt
2
2
dE
Qv
sinθ(y
−2x
) − 3
xycosθ
n
=
(11)
2
2
52
dt
4
πε
(
x
+
y
)
0
Анализ параметров, влияющих на эффективность системы...
29
Наконец, если это подставить в формулу (4), получаем:
2
2
QvS
sinθ(y
−2x
) − 3xycosθ
i
=
(12)
1
2
2
52
4π
(x
+
y
)
Данные о положении заряженного объекта могут быть получены по изменению тока обнару-
жения.
3.2. Создание математической модели электрического тока при двухэлектродном
электростатическом обнаружении
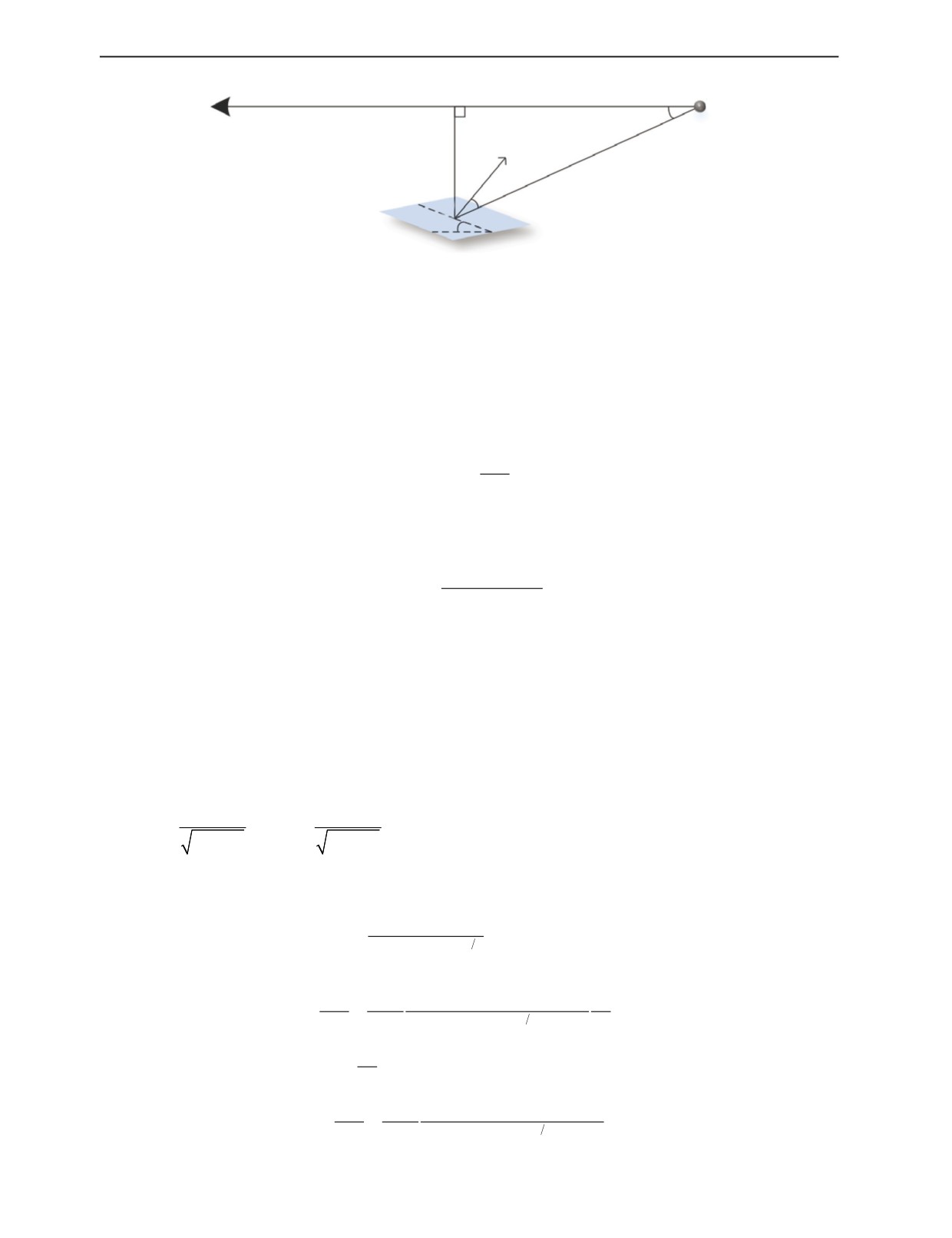
Принцип двухэлектродного электростатического обнаружении показан на рис.
2.
Измерительный электрод состоит из 2 измерительных пластин (электрод J1 и электрод J2), раз-
деленных средой. Для обнаружения индуцированных токов электрическая цепь спроектирована
таким образом, что каждый электрод соединен с резистором R. Когда электрическое поле заря-
женного объекта изменяется, то изменяется и индуцированный на электродах J1 и J2 заряд. При
определении незначительной разности токов может быть получена информация о расположении
заряженного объекта [15].
X
X0
J1
i1
R
i1 - i2
J2
R
i2
Рис. 2. Структурная схема системы двухэлектродного электростатического обнаружении.
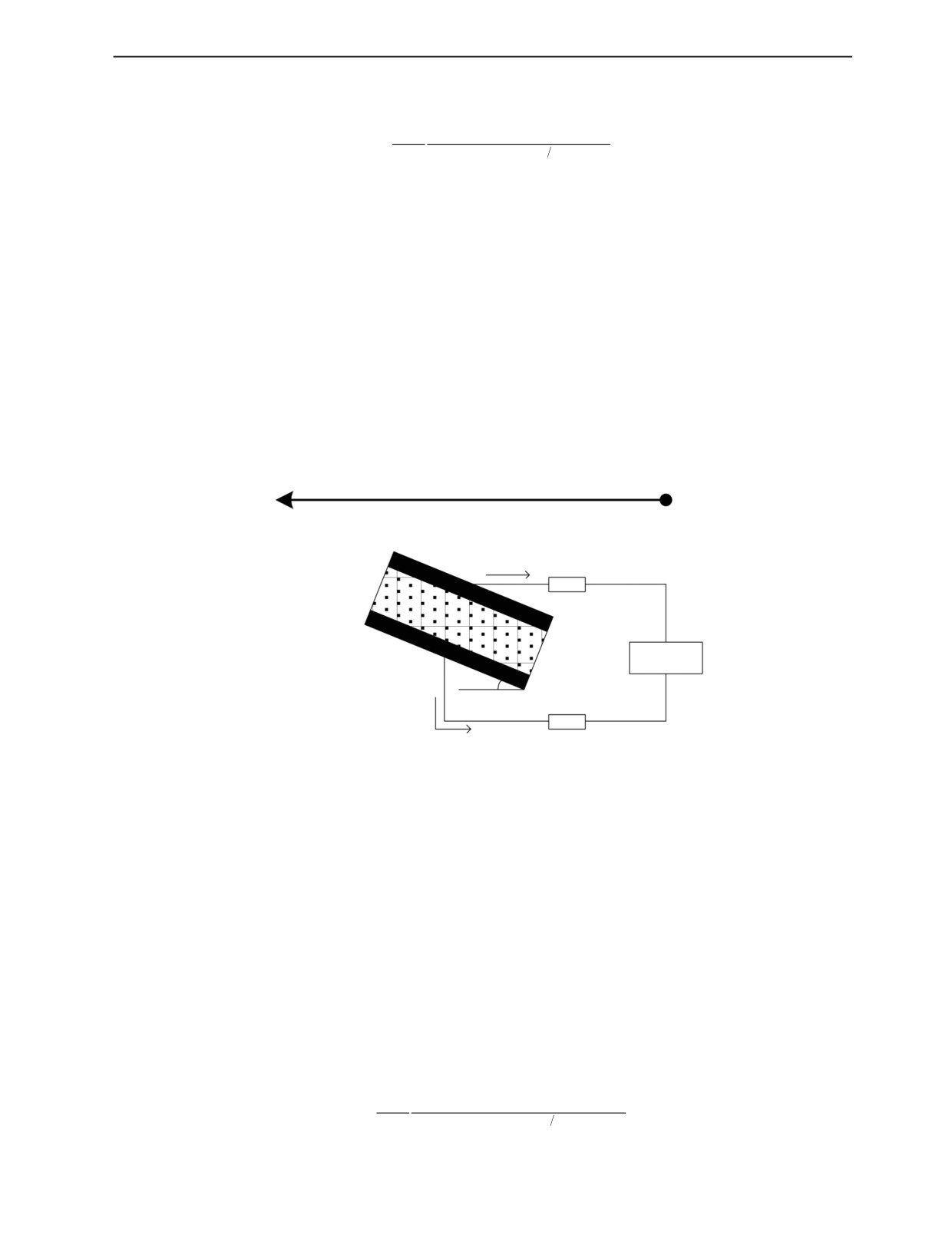
Аналогично предполагая, что заряженный объект является идеальным маленьким шариком,
обозначим его заряд как Q; электростатическая индукция обнаружения электродных пластин J1
и J2 — S; начальное положение шарика — x0; он движется горизонтально с относительной ско-
ростью v; начало координат — центр 0 двух электродных пластин; x и y — расстояние горизон-
тального перемещения и расстояние до заряженного шарика от центральной точки 0 двух элек-
тродных пластин соответственно; расстояние между пластинами — d; θ1 и θ2 — углы между
поверхностями электродов траекторией относительного движения; их диапазон — 0—90°; углы
между напряженностью электрического поля заряженного объекта и нормалями к поверхностям
J1 и J2 — α1 и α2.
Для облегчения понимания принципа двухэлектродного электростатического обнаружении и
упрощения модели системы на рис. 3 представлена упрощенная схема.
Из формулы (12), в соответствии с рис. 3, нетрудно понять, что токи i1 и i2, регистрируемые на
электродных пластинах J1 и J2, определяются так:
2
2
QvS
sinθ
(y
−2x
1
)
−3x
y
cosθ
1
1
1
1
1
i
=
;
(13)
1
2
2
52
4π
(x
1
+
y
1
)
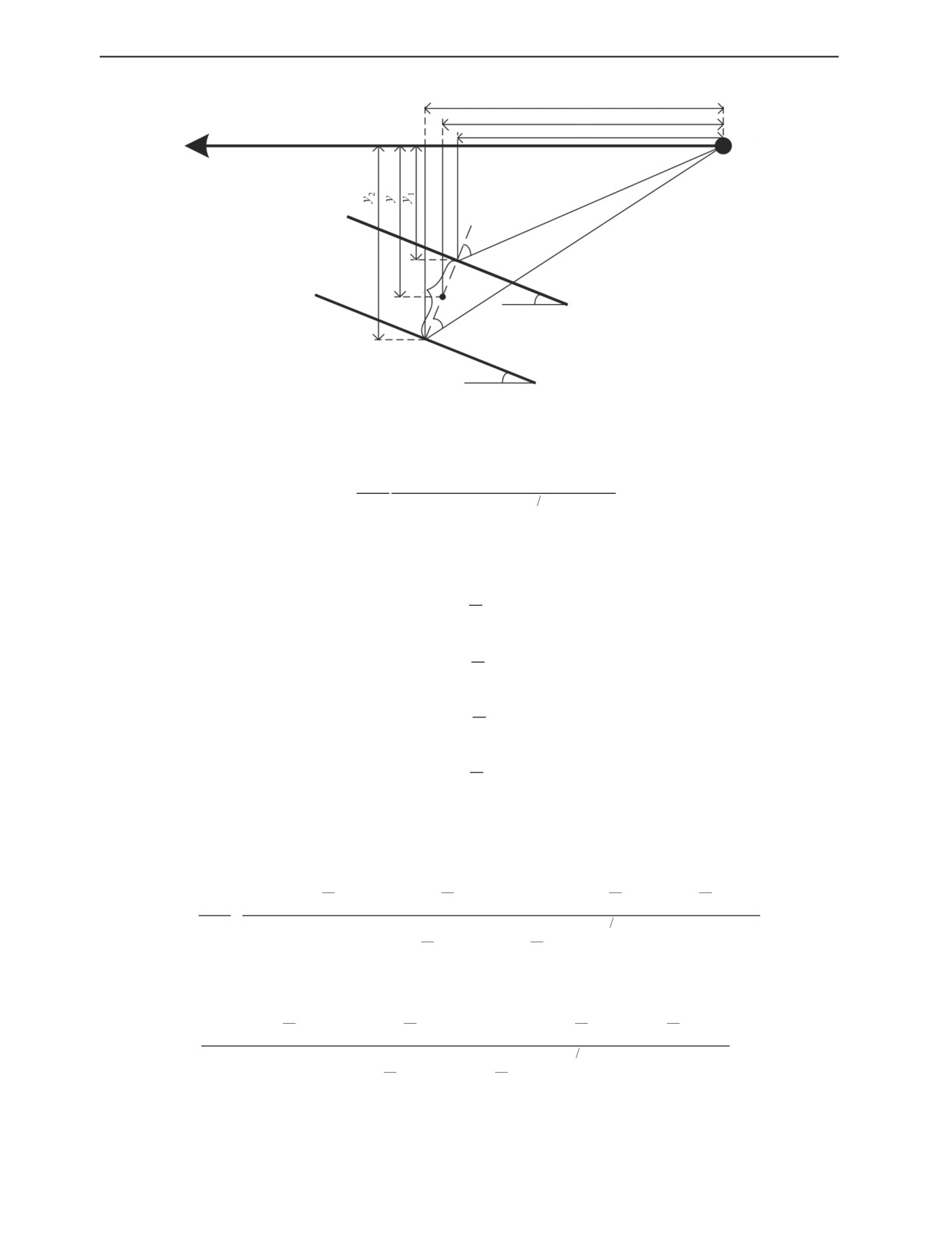
30
Хун Чен, Бинтинг Чжа, Чэнцзюнь Ван, Ци Чжун
x2
x
x1
X0
J1
α1
d
0
θ1
J2
α2
θ2
Рис. 3. Схема расположения заряженного объекта и электродных пластин J1 и J2.
2
2
QvS
sinθ
(y
−2x
2
) − 3x
y
cosθ
2
2
2
2
2
i
=
,
(14)
2
2
2
52
4π
(x
+
y
)
2
2
где x1 и y1 — расстояние горизонтального перемещения и расстояние до заряженного шарика от
центра электродной пластины J1 соответственно; x2 и y2 могут быть получены таким же образом.
x1, x2, y1 и y2 определяются по x и y в соответствии с рис. 3:
d
x
=x-
sin
θ
;
(15)
1
1
2
d
y
= y-
cosθ
;
(16)
1
1
2
d
x
=x+
sin
θ
;
(17)
2
2
2
d
y
= y+
cos
θ
(18)
2
2
2
Подставляя формулы (15) и (16) в формулу (14) и формулы (17) и (18) в формулу (15), в итоге
получаем выражение разности токов i = i1 - i2, наводимых в электродных пластина J1 и J2:
d
2
d
2
d
d
sinθ
(y
−
cosθ
)
−2(x
−
sinθ
)
−3cosθ
(x
−
sinθ
)(y
−
cosθ
)
1
1
1
1
1
1
QvS
2
2
2
2
i
=
-
52
4π
d
d
2
2
(x
−
sinθ
)
+
(
y
−
cosθ
)
1
1
2
2
d
d
d
d
2
2
sinθ
(y
+
cosθ
)
−2(x
+
sinθ
)
−
3cosθ
(x
+
sinθ
)(y
+
cosθ
)
2
2
2
2
2
2
2
2
2
2
−
(19)
52
d
2
d
2
(x
+
sinθ
)
+(
y
+
cosθ
)
2
2
2
2
Приведенная выше формула представляет собой выражение разности токов при двухэлектрод-
ном электростатическом обнаружении.
Анализ параметров, влияющих на эффективность системы...
31
Как показано на рис. 3, соответствующие потенциалы на электродных пластинах J1 и J2 могут
быть выражены:
dE
1
u
=ϕ
=
;
(20)
1
J1
2
dE
2
u
=ϕ
=
,
(21)
2
J
2
2
где E1 и E2 могут быть получены из формулы (9):
Q
E
=
(x
sinθ
+
y
cosθ
);
(22)
1
2
2
32
1
1
1
1
4πε
(x
+
y
)
0
1
1
Q
E
=
(x
sinθ
+
y
cosθ
).
(23)
2
2
2
32
2
2
2
2
4πε
(x
+
y
)
0
2
2
Затем (22) подставляется в формулу (20), а (23) подставляется в формулу (21). Выражение для
разности потенциалов, генерируемой на электродных пластинах представляется как
Qd
xsinθ
+
ycosθ
−d
2
xsinθ
+
ycosθ
+d
2
1
1
1
1
u
=
−
(24)
2
2
32
2
2
32
8πε
[(x-d sinθ
2)
+(y-d
cosθ
2)
]
[(x+d sinθ
2)
+(y+d
cosθ
2)
]
0
1
1
1
1
Обозначенная выше формула представляет собой выражение разности потенциалов при двух-
электродном электростатическом обнаружении.
4. МОДЕЛЬНОЕ ИССЛЕДОВАНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ОБНАРУЖЕНИЯ
4.1. Сравнительный анализ одноэлектродного и двухэлектродного электростатического
обнаружения
a) Влияние угла θ на эффективность одноэлектродного электростатического обнаружения
Было исследовано влияние угла θ на эффективность одноэлектродного электростатического
обнаружения. Предположим, что заряд шарика Q = 1×10-5 C, интервал его перемещения
x = -10~10 м, а расстояние до шарика y = 5 м, на таком расстоянии шарик может рассматриваться
как точечный заряд. Относительная скорость движения снаряда v = 1000 м/с, чувствительный
участок пластины S = 0,02 м2, центр электродной пластины x = 0 м. Полагая, что θ равен 0, 45 и
90°, формула (12) использовалась в Matlab для математического моделирования. Форма сигнала
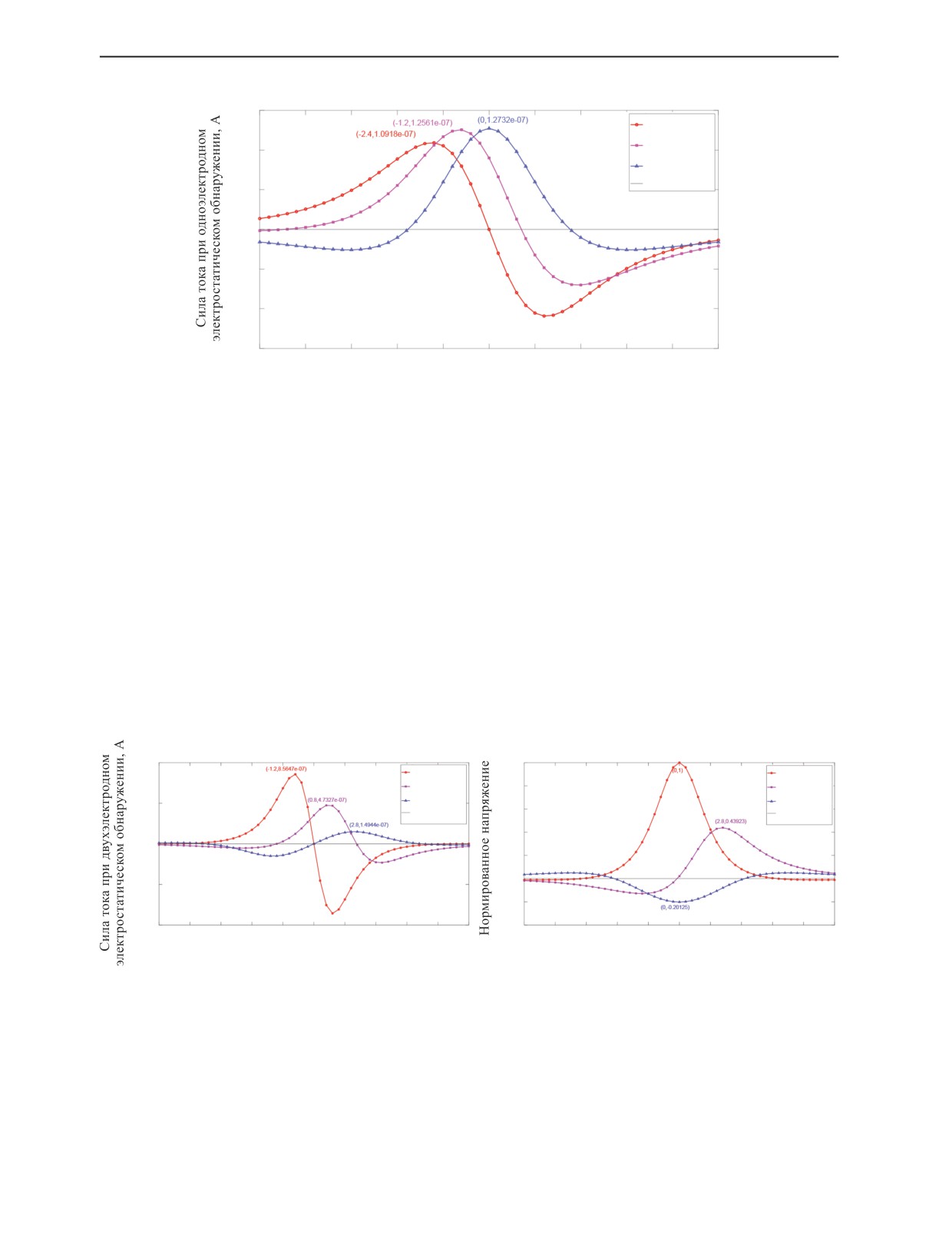
тока при одноэлектродном электростатическом обнаружении показана на рис. 4.
Во время движения заряженного объекта (по мере его приближения) на свободный заряд
электрода действует большая сила электрического поля, что приводит к большему изменению
индуцированного заряда и большему индуцированному току. Из формулы (4) получается, что
индуцированный ток не связан с напряженностью электрического поля, но пропорционален ско-
рости изменения электрического поля. Из формы сигнала θ = 0° видно, что при моделировании
заряженный объект движется прямо над чувствительным электродом, и расстояние между ними
наименьшее. В этой точке напряженность электрического поля, перпендикулярная направлению
электрода, наибольшая, в результате чего в x = 0 м образуется полюс. Следовательно, изменение
напряженности электрического поля равно 0, а ток i1 тоже равен 0 [16]. Анализируя движение
нулевой точки индуцированного тока формы сигнала θ = 45° и θ = 90°, можно заключить, что
при относительном движении объекта и электрода, как только электрическое поле становится
перпендикулярным электроду, относительное положение заряженного объекта и электрода изме-
няется, что приводит к изменению полюса электрического поля. Следовательно, точка нуля i1
изменяется.
32
Хун Чен, Бинтинг Чжа, Чэнцзюнь Ван, Ци Чжун
×10-7
1,5
θ = 0°
1
θ = 45°
θ = 90°
Базовая линия
0,5
0
-0,5
-1
-1,5
-10
-8
-6
-4
-2
0
2
4
6
8
10
x, м
Рис. 4. Форма сигнала тока при одноэлектродном электростатическом обнаружении.
Сравнивая формы сигналов тока при контроле одним электродом при θ = 45° и θ = 90°, можно
прийти к выводу, что при увеличении угла θ (диапазон θ в пределах 0~90°) максимальное значение
тока i1 соответственно увеличивается. Когда θ = 90°, i1 принимает максимальное значение в
x = 0 м, и результаты расчета показывают, что i1max = 1,2732×10-7А.
б) Влияние угла θ на эффективность двухэлектродного электростатического обнаружения
Используя выражения для параметров объекта разности токов и разности потенциалов при
двухэлектродном электростатическом обнаружении, проводится математическое моделирование
тока при двухэлектродном электростатическом обнаружении. Было предположено, что интервал
между пластинами d = 5 м, а центр пластин находится в x = 0 м, принимая во внимание все пред-
положения, обозначенные выше. Также предположено, что θ = θ1 = θ2 принимают три значения: 0,
45 и 90°, которые в сочетании в формулами (19) и (24) подставляются в Matlab для расчетов.
Форма сигнала тока при двухэлектродном электростатическом обнаружении показана на рис. 5.
а
б
×10-6
1
1
θ = 0°
θ = 0°
θ = 45°
0,8
θ = 45°
0,5
θ = 90°
θ = 90°
Базовая
0,6
Базовая
линия
линия
0,4
0
0,2
0
-0,5
-0,2
-1
-0,4
-10 -8
-6
-4
-2
0
2
4
6
8
10
-10 -8
-6
-4
-2
0
2
4
6
8
10
x, м
x, м
Рис. 5. Форма сигнала тока при двухэлектродном электростатическом обнаружении: форма сигнала тока (a); форма сиг-
нала нормированного напряжения (б).
Сравнивая формы сигналов тока при двухэлектродном электростатическом обнаружении и
нормированного напряжения при θ = 0°, θ = 45° и θ = 90°, был сделан вывод, что при увеличении
угла θ (диапазон изменения θ составляет 0°~90°) максимальные значения тока i и разности потен-
циалов u уменьшаются. Когда θ = 0°, i и u принимают наибольшие значения при x = ±1,2 м и x = 0
м соответственно, а по результатам моделирования imax = ±8,5647 × 10-7 А.
Анализ параметров, влияющих на эффективность системы...
33
в) Анализ результатов математического моделирования
При сравнительном анализе было обнаружено, что с увеличением угла θ динамика максимумов
тока при одноэлектродном и двухэлектродном электростатическом обнаружении противоположна.
При одинаковых условиях эффективность использования тока при двухэлектродном электростати-
ческом обнаружении значительно выше, чем при одноэлектродном. Таким образом, обнаружение
заряженных объектов с помощью двойного электрода дает лучшие результаты, при этом оптималь-
ный угол составляет θ = 0°.
В следующем расчете (для достижения наилучших результатов) θ = θ1 = θ2 = 0° подставляются
в формулы (19) и (24), а математическая модель может быть упрощено до вида:
d
d
3x y
+
3x y
−
Qvs
2
2
i
=
-
;
(25)
5/2
5/2
4π
2
2
d
d
2
2
x
+
y
+
x
+
y
−
2
2
Qd
y-d
2
y+d
2
u
=
-
(26)
2
2
32
2
2
32
8πε
[
x
+(
y-d
2)
]
[
x
+(
y+d
2)
]
0
4.2. Математическое моделирование двухэлектродного электростатического обнаружения
Две чувствительных электродных пластины в системе двухэлектродного электростатического
обнаружения и обнаруживаемый заряженный объект образуют полную систему электростатиче-
ской индукции. Формулы (25) и (26) показывают, что амплитуда тока обнаружения i и разность
потенциалов u прямо пропорциональны величине заряда Q объекта, относительной скорости дви-
жения v и площади электродов S. При математическом моделировании двухэлектродного электро-
статического обнаружения главной целью было исследовать влияние расстояние до объекта y и
интервала d между двумя электродами на ток обнаружения i и разность потенциалов u.
a) Влияние расстояние до объекта y на эффективность контроля
Расстояние до объекта прямо влияет на ток обнаружения, разность потенциалов, расстояние
обнаружения и форму сигналов. Для анализа расстояния до объекта y предполагается, что рассто-
яние до объекта бесконечное, т.е. расстояние между электродами и заряженным объектом беско-
нечно, а в электродах не наводится сигнал. При постепенном уменьшении расстояние до объекта
y, в электроде постепенно наводится сигнал. Устанавливая d = 1 м и оставшиеся предположения
неизменными, предполагается, что y принимает три значения: 5, 4 и 3 м, которые в сочетании с
формулами (25) и (26) подставляются в Matlab для расчетов.
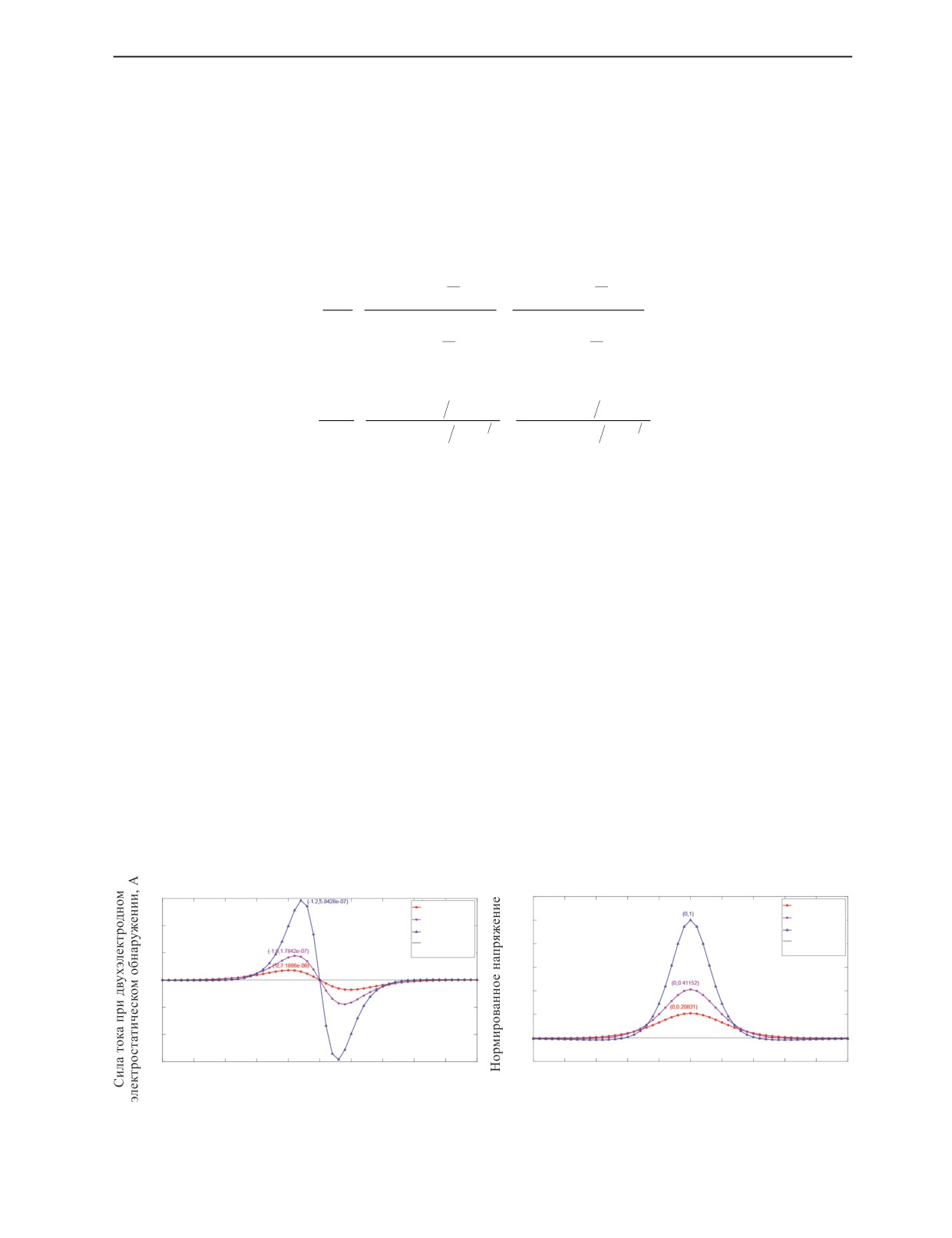
Форма сигнала тока при двухэлектродном электростатическом обнаружении показана на рис. 6.
а
б
×10-7
6
1,2
y = 5
y = 5
y = 4
1
y = 4
4
y = 3
y = 3
Базовая
Базовая
0,8
2
линия
линия
0,6
0
0,4
-2
0,2
-4
0
-6
-0,2
-10 -8
-6
-4
-2
0
2
4
6
8
10
-10 -8
-6
-4
-2
0
2
4
6
8
10
x, м
x, м
Рис. 6. Форма сигнала тока при двухэлектродном электростатическом обнаружении: форма сигнала тока (а); форма
сигнала нормированного напряжения (б).
34
Хун Чен, Бинтинг Чжа, Чэнцзюнь Ван, Ци Чжун
Исходя из рис. 6, можно сделать вывод, что максимальное значение тока и разности потенциа-
лов увеличивается с уменьшением расстояния до объекта, поэтому увеличение расстояния до объ-
екта приводит к уменьшению расстояния до объекта.
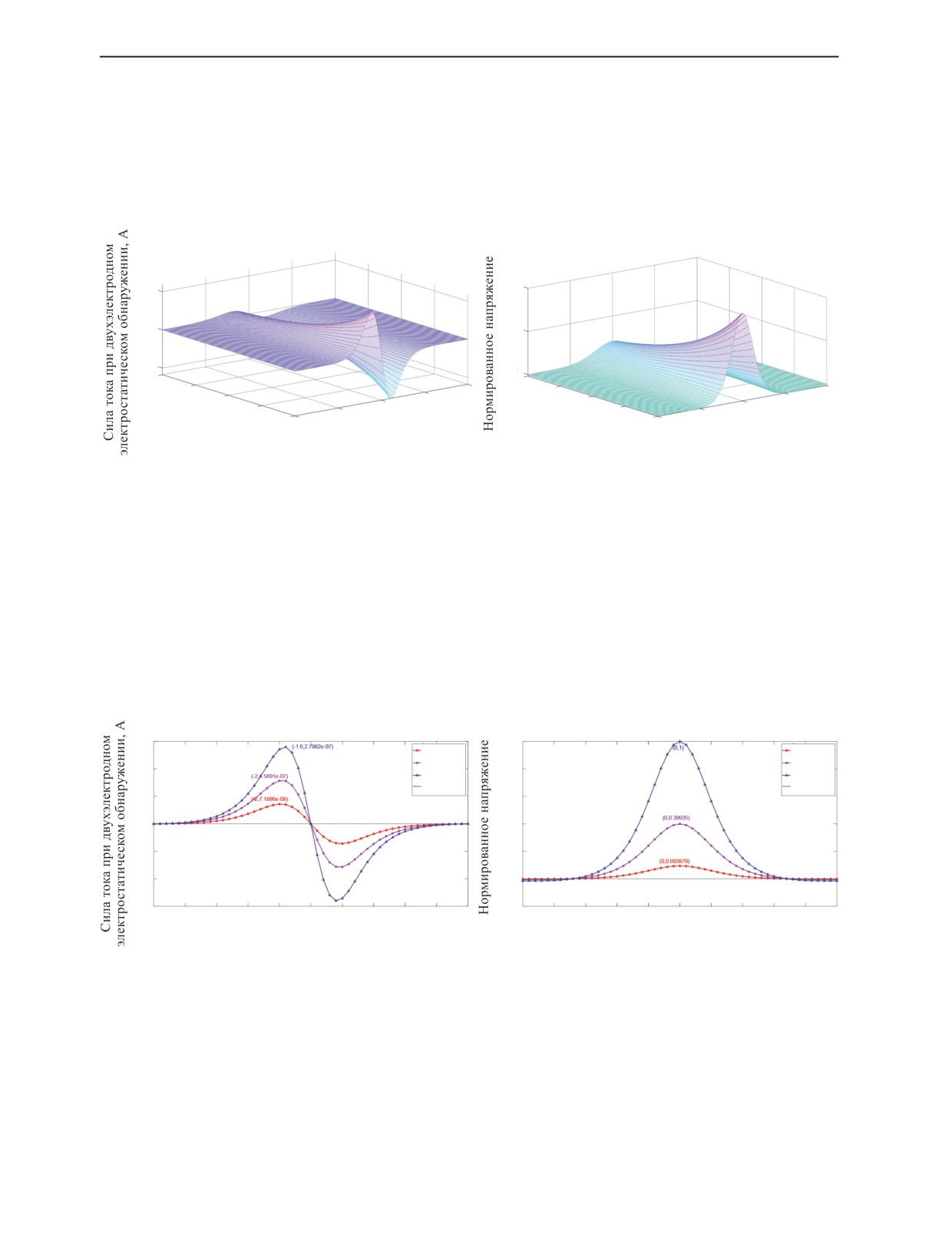
Чтобы лучше проиллюстрировать влияние расстояния до объекта на выходной сигнал, на
рис. 7 показано изменение тока обнаружения и разности потенциалов индукционного электрода
при изменении расстояния между заряженным объектом и электродом в пределах -10~10 м и
расстояние до объекта — 3~5 м.
а
б
×10-7
5
1
0
0,5
-5
0
5
5
4,5
10
4,5
5
10
4
4
5
0
0
3,5
3,5
y, м
-5
–5
3
y, м
3
–10
x, м
–10
x, м
Рис. 7. Кривая влияния расстояние до объекта y на контроль с двумя электродами: кривая влияния тока (а); кривая вли-
яния нормированного напряжения (б).
б) Влияние интервала d между двумя электродами на эффективность обнаружения
Интервал между двумя электродами влияет на амплитуду тока обнаружения, разности потен-
циалов, расстояние обнаружения и форму сигнала. При анализе интервала d между двумя электро-
дами было задано y = 5 м, а оставшиеся предположения остались неизменными. Было предложено,
что d имеет три значения: 1, 2 и 3 м, которые подставляются в Matlab для расчета вместе с форму-
лами (25) и (26).
Форма сигнала тока при двухэлектродном электростатическом обнаружении показана
на рис. 8.
а
б
×10-7
3
1
d = 1
d = 1
d = 2
d = 2
2
d = 3
0,8
d = 3
Базовая
Базовая
линия
линия
1
0,6
0
0,4
-1
0,2
-2
0
-3
-0,2
-10
-8
-6
-4
-2
0
2
4
6
8
10
-10
-8
-6
-4
-2
0
2
4
6
8
10
x, м
x, м
Рис. 8. Форма сигнала тока при двухэлектродном электростатическом обнаружении: форма сигнала тока (а); форма сиг-
нала нормированного напряжения (б).
Из рис. 8 видно, что пиковое значение тока и разности потенциалов увеличивается с увеличе-
нием интервала между двумя электродами, поэтому увеличение интервала между двумя электро-
дами приводит к увеличению расстояния обнаружения.
На рис. 9 показано влияние интервала между двумя электродами на ток обнаружения и раз-
ность потенциалов индукционного электрода соответственно, когда горизонтальное расстояние
между заряженной мишенью и детектирующим электродом составляет от -10~10 м и интервал
между двумя электродами — 1~3 м.
Анализ параметров, влияющих на эффективность системы...
35
а
б
×10-7
4
1
2
0
0,5
-2
-4
0
3
3
2,5
10
2,5
10
5
2
5
2
0
1,5
-5
0
1,5
-5
d, м
1-10
x, м
d, м
1
x, м
–10
Рис. 9. Кривая влияния интервала d при двухэлектродном электростатическом обнаружении: кривая влияния тока (а);
кривая влияния нормированного напряжения (б).
в) Влияние Q, v, S на эффективность обнаружения
Если предположить, что исходный график показан на рис. 5, то при увеличении S в 10 раз
(S = 0,2 м2), результирующая форма сигнала при двухэлектродном электростатическом обнаруже-
нии показана на рис. 10.
а
б
×10-5
1
10
θ = 0°
θ = 0°
Базовая
Базовая
линия
8
линия
0,5
6
0
4
2
-0,5
0
–1
-2
-10
-8
-6
-4
-2
0
2
4
6
8
10
-10
-8
-6
-4
-2
0
2
4
6
8
10
x, м
x, м
Рис. 10. Форма сигнала при двухэлектродном электростатическом обнаружении, когда S = 0,2 м2: форма сигнала тока (а);
форма сигнала нормированного напряжения (б).
Сравнивая рис. 5 и 10, можно заметить значительное изменение в максимальных значениях
величин. Объединяя формулы (25) и (26), несложно увидеть, что когда что-либо из Q, v, S увели-
чивается в n раз, амплитуда тока обнаружения и разности потенциалов также увеличивается в n
раз. Следовательно, можно сделать вывод, что изменение Q, v и S пропорционально изменению
тока обнаружения и разности потенциалов.
г) Результаты математического моделирования
На основе анализа моделирования можно сделать вывод, что расстояние двухэлектродного
электростатического обнаружения уменьшается с увеличением расстояния до объекта, в то время
как оно увеличивается с увеличением интервала между двумя электродами.
Сравнивая влияние расстояния до объекта и интервала между двумя электродами на эффектив-
ность обнаружения двух электродов на рис. 7 и рис. 9, можно сделать вывод, что расстояние до
объекта оказывает большее влияние на эффективность обнаружения, чем интервал между двумя
электродами.
При сравнении рис. 5 и 10 и объединении формул (25) и (26) для анализа влияния Q, v, S и d на
эффективность двухэлектродного электростатического обнаружения видно, что Q, v, S пропорци-
ональны амплитуде тока обнаружения, а возрастание всех трех величин приводит к увеличению
тока обнаружения, Q и d пропорциональны амплитуде разности потенциалов и их увеличение
приводит к увеличению разности потенциалов.
36
Хун Чен, Бинтинг Чжа, Чэнцзюнь Ван, Ци Чжун
5. ЭКСПЕРИМЕНТАЛЬНОЕ ПОДТВЕРЖДЕНИЕ ТЕОРЕТИЧЕСКИХ РЕЗУЛЬТАТОВ
Далее проверяется точность разработанной системы и математических моделей. В работах [11]
и [12] тестировались одноэлектродный и двухэлектродный модули электростатического обнаруже-
ния соответственно. Исследовательская система включает в себя модуль электростатического
обнаружения, блок имитатора заряженного объекта и систему сбора данных [11]. Сравнивая тео-
ретическую форму сигнала при моделировании и экспериментальную форму сигнала в данном
исследовании, можно проверить точность созданной математической модели (рис. 11).
а
б
Рассчитанная форма
Рассчитанная форма
сигнала
сигнала
1,0
1,0
Экспериментальная форма
Экспериментальная форма
сигнала
сигнала
0,5
0,5
0,0
0,0
-0,5
-0,5
–1,0
-1,0
-10
-5
0
5
10
-6
-4
-2
0
2
4
6
x, м
x, м
Рис. 11. Сравнение формы выходного сигнала модуля электростатического обнаружения: сравнение формы волны
выходного сигнала при использовании одного электрода (а); сравнение формы волны выходного сигнала при использо-
вании двух электродов (б).
После того, как нормируется выходной сигнал, из рис. 11 можно увидеть, что форма контроли-
руемого выходного сигнала модулей электростатического обнаружения при использовании одного
и двух электродов находится в хорошем согласии с теоретической рассчитываемой формой сигна-
ла. Модель системы электростатической индукции и математическая модель, предложенные в
данной статье, являются достаточно приемлемыми и могут быть использованы для дальнейших
исследований.
6. ЗАКЛЮЧЕНИЕ
Предлагается комплексная система электростатической индукции, разрабатывается модель
системы и математическая модель тока и разности потенциалов при двухэлектродном электроста-
тическом обнаружении. Влияние различных факторов в системах электростатической индукции на
эффективность обнаружения получено с помощью компьютерного моделирования.
1. Создав математические модели для одноэлектродного и двухэлектродного электростатиче-
ского обнаружения и проведя компьютерный модельный анализ, было установлено, что эффектив-
ность двухэлектродного электростатического обнаружения значительно выше, чем эффективность
одноэлектродного электростатического обнаружения. Дальнейший анализ привел к упрощению и
определению оптимальной модели системы двухэлектродного электростатического обнаружения
и математической модели
2. Анализируя упрощенную математическую модель, становится ясно, что расстояние двухэ-
лектродного электростатического обнаружения тесно связано с факторами, присущими системе
электростатической индукции. Дальнейший анализ результатов моделирования показал, что по
мере увеличения интервала между двумя электродами и площади электродной пластины (т.е. заря-
да объекта и относительной скорости движения) расстояние двухэлектродного электростатическо-
го обнаружения, очевидно, увеличивается. И наоборот, при увеличении расстояния до объекта
расстояние двухэлектродного электростатического обнаружения заметно уменьшается.
3. Путем анализа результатов моделирования было установлено, что расстояние двухэлек-
тродного электростатического обнаружения связано с расстоянием до объекта, интервалом
Анализ параметров, влияющих на эффективность системы...
37
между двумя электродами и площадью электродной пластины (зарядом объекта и относитель-
ной скоростью движения). В результате сравнительного анализа ряда условий было установле-
но, что расстояние до объекта оказывает большее влияние на эффективность электростатическо-
го обнаружения двухэлектродной системы, чем интервал между двумя электродами на эффек-
тивность обнаружения, а эти два фактора оказывают гораздо большее влияние, чем площадь
электродной пластины (заряд объекта и относительная скорость движения). Поэтому на практи-
ке следует уделять особое внимание разработке и оптимизации расстояние до объекта и интер-
вала между двумя электродами.
Авторы заявляют об отсутствии конфликта интересов.
Авторы хотели бы поблагодарить Научный Фонд для Постдоков Китая (№ гранта
2021M701713), Цзянсускую Программу Финансирования Выдающихся Талантов
Постдокторантуры (№ гранта 2022ZB245), Национальный Фонд Естественных Наук Китая
(№ гранта 52201399) и 2021 Открытый проект Фонда науки и технологий по проекту лаборато-
рии электромеханического динамического управления (№ гранта 212-C-J-F-QT-2022-0020) за
обеспечение финансирования для проведения экспериментов.
СПИСОК ЛИТЕРАТУРЫ
1. Gorlov M.I., Strogonov A.V., Vinokurov A.A. Benchmarking the Reliability of the Consignments of
Semiconductor Articles Using Electrostatic Discharges // Russian Journal of Nondestructive Testing. 2018.
V. 54. P. 455—461.
2. Song C.L., Teongsan Y. Effective Electrostatic Discharge detection in equipment via EMI // Proceedings
of the IEEE/CPMT International Electronics Manufacturing Technology Symposium. 2008. V. 1. P. 1—4.
3. Dong Wang, Bo Xiong. Simulation Analysis of Electrostatic Field Detection of Moving Target // Journal
of Naval Aeronautical and Astronautical University. 2017. V. 32. No. 4. P. 411— 415.
4. Fisher J., Hoole P.R., Pirapaharan K. et al. Pre-Lightning Strikes and Aircraft Electrostatics // Matec
Web of Conferences. 2017. V. 87.
5. Kobayashi T., Oyama S., Makimoto N. et al. An electrostatic field sensor operated by self-excited
vibration of MEMS-based self-sensitive piezoelectric microcantilevers // Sensors and Actuators A: Physical.
2013. V. 198. P. 87—90.
6. Noras M.A., Ramsey S.P., Rhoades B.B. Projectile detection using quasi-electrostatic field sensor array
// Journal of Electrostatics. 2013. V. 71 (3). P. 220—223.
7. Trinks H. Electric field detection and ranging of aircraft // IEEE on Aerospace and Electric System.
1982. V. 3. P. 268—273.
8. Kimoto A., Ichinose Y., Shida K. A new sensing method using contact voltage for material discrimination
// Sensors and Actuators A: Physical. 2009. V. 149. No. 1. P. 1—6.
9. Kurita K., Morinaga S. Noncontact Detection of Movements of Standing Up From and Sitting Down
on a Chair Using Electrostatic Induction // IEEE Sensors Journal. 2019. V. 19 (19). P. 8934—8939.
10.Yinlin Li, Zhanzhong Cui, Yuxian Bai, Jusheng Shi. Charge-Inducing Electrostatic Fuze Detecting
Technology // Journal of Beijing Institute of Technology. 1999. (S1). P. 3—5.
11. Weixin Li, Haidong Wu, Yuelong Liu, Haitao Wang. Research on Energy Loss of Fuze Setting System
Based on Magnetic Resonant Coupling in Complex Environment // Journal of Test and Measurement
Technology. 2016. V. 30 (04). P. 341—346.
12. Liqing Fang, Kai Chen, Hongkai Wang, Lei Zhang. Application of Passive Non-Contact Electrostatic
Detection in Composite Fuze // Ordnance Industry Automation. 2012. V. 31 (12). P. 85—87.
13. Bo Xiong, Yunlong Dong, Dong Wang Weixin, Li. Analysis of Main Influence Factors on Electrostatic
Fuse Detection // Journal of Naval Aeronautical and Astronautical University. 2019. V. 34 (06). P. 465—469.
14. Yanxu Li, Lixin Xu. Study of a Novel Electrostatic Detection Sensor // Applied Mechanics & Materials.
2012. V. 110—116. P. 5476—5482.
15. Shiryaeva S.O., Grigor’ev A.I. On the stability of a bending mode of a charged jet of viscous dielectric
liquid with the ultimate electroconductivity in a collinear electric field // Surface Engineering & Applied
Electrochemistry. 2011.
16. Dong Wang, Bo Xiong, Weixin Li. Simulation Analysis of Influencing Factors of Electrostatic Detection
// Journal of Ordnance Equipment Engineering. 2017. No. 12. P. 272—277.