ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2021, том 57, № 11, с. 1503-1515
ТЕОРИЯ УПРАВЛЕНИЯ
УДК 517.977.58
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ
СИСТЕМОЙ С НЕОПРЕДЕЛЁННОСТЯМИ
ПО РЕЗУЛЬТАТАМ ИЗМЕРЕНИЙ
© 2021 г. К. С. Маянцев, П. А. Точилин
Рассматривается задача управления кусочно-линейной системой на конечном отрезке
времени в условиях неопределённости на основании неполной и неточной информации.
Разработана схема приближённого решения, включающая построение вспомогательных
кусочно-квадратичных функций цены. Приведены формулы для расчёта такой функции,
позволяющей оценить извне информационное множество кусочно-линейной системы. Пред-
ложен алгоритм построения позиционного управления, минимизирующего (в соответству-
ющей метрике) отклонение внешней оценки информационного множества от внутренней
оценки множества разрешимости и решающего задачу о переводе траектории системы в
малую окрестность целевого множества за заданное время.
DOI: 10.31857/S037406412111008X
Введение. В работе рассматривается задача целевого управления для кусочно-линейной
системы с переключениями (частного случая гибридной системы) [1, 2]. Необходимо перевести
траекторию системы из начального множества в малую окрестность целевого множества на
заданном отрезке времени. Начальное положение системы считается неизвестным, а в уравне-
ниях динамики имеются погрешности (неопределённости). Единственная доступная информа-
ция о текущем состоянии системы поступает из уравнений наблюдения. При этом наблюдения
являются неполными и неточными.
Как известно [3], при решении задач управления на основании неполной и неточной инфор-
мации о текущем состоянии наиболее важным является правильный выбор позиции системы.
В [3] предложены несколько вариантов конструкций позиций, включающих либо информаци-
онные множества системы, либо соответствующие функции цены. В частном случае линейной
динамики могут быть реализованы эффективные приближённые методы для решения задачи
управления [4]. В настоящей работе указанные выше общие идеи реализованы для специаль-
ного случая кусочно-линейной динамики, а в позицию системы включена внешняя оценка
информационного множества.
Из задачи позиционного управления по результатам наблюдений можно выделить несколь-
ко ключевых подзадач: 1) построение множеств разрешимости (попятных множеств достижи-
мости) [5] или их внутренних оценок; 2) построение информационных множеств; 3) синтез
управлений за счёт применения модификации метода экстремального прицеливания [6]. Осо-
бенностью данной работы является то, что для решения указанных подзадач используется
специальный класс непрерывных кусочно-квадратичных функций цены, ранее применявших-
ся авторами при решении задач достижимости [7], разрешимости и синтеза управлений [8, 9]
на основании полной информации о состоянии системы.
В работе, используя кусочно-квадратичные функции цены, а также идею принципа срав-
нения [5, 10], получены формулы для построения внешних оценок информационных множеств
кусочно-линейной системы и разработана общая схема вычисления синтеза управлений за счёт
прицеливания оценками информационных множеств на внутренние аппроксимации множеств
разрешимости.
1. Математическая модель системы. Рассмотрим математическую модель системы с
переключениями, которую также будем называть кусочно-линейной системой. Она состоит из
совокупности N подсистем, каждая из которых задаётся системой обыкновенных дифферен-
циальных уравнений
x = A(i)(t)x + B(i)(t)u + C(i)(t)v + d(i)(t), t ∈ [t0,t1], i = 1,N.
(1)
1503
1504
МАЯНЦЕВ, ТОЧИЛИН
В любой момент времени активной является ровно одна из этих систем. Вектор x(t) ∈ Rnx -
фазовая траектория системы; u ∈ Rnu является управляющим параметром, v ∈ Rnv - неопре-
делённостью (помехой) динамики. Матричнозначные функции A(i)(t) ∈ Rnx×nx , B(i)(t) ∈
∈ Rnx×nu, C(i)(t) ∈ Rnx×nv и вектор-функции d(i)(t) ∈ Rnx заданы и непрерывны на [t0,t1].
Модель рассматриваемой кусочно-линейной системы включает в себя также набор пра-
вил мгновенных переключений активной подсистемы. В фазовом пространстве Rnx задана
ограниченная замкнутая область Ω. Область Ω поделена на подобласти Ω(i), i = 1, N , с
помощью гиперплоскостей переключений:
H(k) = {x ∈ Rnx : 〈x,c(k)〉 = γ(k)},
∥c(k)∥ = 1, k = 1, NH.
Траектория системы x(t) удовлетворяет i-му уравнению из (1), если x(t) ∈ Ω(i). В момент
перехода x(t) из Ω(i) в Ω(j) (через границу между i-й и j-й областями) происходит обя-
зательная смена активной подсистемы (“режима функционирования”) с i-й на j-ю, которую
также будем называть переключением. В случае возможного движения вдоль границы между
областями Ω(i) и Ω(j) время переключения определяется как первый момент схода траек-
тории с границы внутрь области Ω(j). Далее будем рассматривать только такие траектории
системы (1), которые не покидают Ω. Предполагаем, что область Ω подобрана таким образом,
что множество траекторий с указанным свойством не пусто.
Кусочно-линейная система указанного вида может быть получена, например, в результате
кусочной линеаризации нелинейных дифференциальных уравнений [9].
Будем считать, что точное текущее положение системы x(t) неизвестно (в том числе в на-
чальный момент времени t0). Однако его можно оценить на основании поступающих в режиме
реального времени результатов измерений. Рассматриваем следующее правило измерений:
y(t) = G(t)x(t) + w(t), t ∈ [t0, t1],
(2)
в котором вектор y(t) ∈ Rny - доступное измерение траектории, а w ∈ Rny - погрешность
измерений, матричнозначная функция G(t) ∈ Rny×nx задана и непрерывна. Кроме того, пред-
положим, что существует априорная оценка начального состояния:
x(t0) ∈ X0,
где множество X0 ⊂ Ω является выпуклым и компактным.
Управление u и помехи (неопределённости) v, w удовлетворяют следующим жёстким
поточечным ограничениям: u = u(π) ∈ P(t), v = v(t) ∈ Q(t), w = w(t) ∈ R(t), где P(t) ⊂
⊂ Rnu, Q(t) ⊂ Rnv, R(t) ⊂ Rny - многозначные отображения, непрерывные в смысле метрики
Хаусдорфа и принимающие выпуклые компактные значения. Позиция π системы определя-
ется ниже.
Пусть ζt( · , t0) - совокупность неопределённостей, присутствующих в системе:
ζt(·,t0) = {x0,v(τ),w(τ): x0 ∈ X0, v(τ) ∈ Q(τ), w(τ) ∈ R(τ), τ ∈ [t0,t]}.
Произвольная допустимая реализация ζt1 ( · , t0) вместе с заданным допустимым управлением
u(·) определяют траекторию x(t) = x(t, t0, x0)|u(·),v(·) системы (1), а также вектор-функцию
измерений y(t), определённую согласно (2). Здесь t ∈ [t0, t1].
Предположим, что для любых двух соседних областей Ω(i) и Ω(j), общей границей кото-
рых является гиперплоскость H, выполняется
либо условие односторонней проницаемости: при любых t ∈ [t0, t1], x ∈ H
⋂Ω и для всех
u(i) ∈ P(t), v(i) ∈ Q(t), u(j) ∈ P(t), v(j) ∈ Q(t) имеет место равенство
sgn (〈c, A(i)(t)x + B(i)(t)u(i) + C(i)(t)v(i) + d(i)(t)〉) =
= sgn (〈c,A(j)(t)x + B(j)(t)u(j) + C(j)(t)v(j) + d(j)(t)〉) = ±1
(здесь c ∈ Rnx - нормаль к H, ∥c∥ = 1);
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1505
либо условие непрерывного сопряжения: при любых t ∈ [t0, t1], x ∈ H
⋂Ω и для всех
u ∈ P(t), v ∈ Q(t) выполняются равенства B(i)(t) = B(j)(t) и
A(i)(t)x + B(i)(t)u + C(i)(t)v + d(i)(t) = A(j)(t)x + B(j)(t)u + C(j)(t)v + d(j)(t).
Рассмотрим класс Uf допустимых позиционных управлений, содержащий многозначные
отображения u = u(π). Такое управление u(π) будем называть допустимым, если при под-
становке его в (1) полученные дифференциальные включения имеют решения при любом на-
чальном векторе фазовых переменных x0 ∈ Ω.
Для неопределённостей v, w будем использовать классы допустимых помех, представ-
ляющие собой множества измеримых функций v(t) и w(t) соответственно, заданных при
t ∈ [t0,t1] и удовлетворяющих почти всюду ограничениям v(t) ∈ Q(t), w(t) ∈ R(t).
Заметим, что при выполнении условий односторонней проницаемости или непрерывно-
го сопряжения для любой траектории x(t) системы, соответствующей допустимым помехам
ζt1 (·,t0) и допустимому управлению u(·), на гиперплоскостях переключений H(k) невозмож-
но возникновение скользящих режимов [1], при которых x(t) не удовлетворяет какому-либо
из уравнений (1).
Уравнения наблюдений (2) можно интерпретировать как фазовые ограничения на состоя-
ние системы, которые становятся известными в режиме реального времени:
x(t) ∈ Y(t) := {x: y(t) - G(t)x = r(t) ∈ R(t)}, t ∈ [t0, t1].
(3)
Информационным множеством [11, с. 12] системы (1) при доступных измерениях y(t) и
фиксированном управлении u(τ), τ ∈ [t0, t], назовём множество
X (t, t0, X0) = {x : существует v(·) такое, что
x(t0, t, x)|u(·),v(·) ∈ X0, x(τ) ∈ Y(τ) для всех τ ∈ [t0, t]},
(4)
где x(t0, t, x)|u(·),v(·) - значение траектории, выпущенной из позиции (t, x) в обратном времени,
в момент времени t0. Информационная трубка X [t] - это соответствующее многозначное
отображение X ( · , t0, X0).
Позицией системы назовём пару π = {t,X(t)}, где t ∈ [t0,t1] определяет текущее время, а
информационное множество X (t) = X (t, t0, X0) содержит неизвестное состояние системы x(t),
т.е. является его гарантированной оценкой, учитывающей полученные к моменту t результаты
наблюдений y(τ), τ ∈ [t0, t].
2. Расширенные переменные. Будем далее считать, что множества P(t), Q(t), R(t)
являются эллипсоидами:
P(t) = E(p(t), P (t)), p(t) ∈ Rnu , P (t) ∈ Rnu×nu , P (t) = Pт(t) > 0,
Q(t) = E(q(t), Q(t)), q(t) ∈ Rnv , Q(t) ∈ Rnv×nv , Q(t) = Qт(t) > 0,
R(t) = E(0, R(t)), R(t) ∈ Rny×ny , R(t) = Rт(t) > 0,
центры эллипсоидов p(t), q(t) и матрицы конфигураций P (t), Q(t), R(t) непрерывны по
t ∈ [t0,t1]. Матрицы P(t), Q(t), R(t) являются положительно определёнными при любом
фиксированном t.
Рассмотрим также “расширенное” пространство переменных x = (xт, 1)т ∈ Rnx+1.
Эллипсоид E(q, Q) в пространстве Rk задаётся следующим соотношением:
E (q, Q) = {x ∈ Rk : 〈x - q, Q-1(x - q)〉 ≤ 1} = {x ∈ Rk : 〈x,Qx〉 ≤ 1},
где
(
)
Q-1
-Q-1q
x = (xт,1)т,
Q=
-qтQ-1
qтQ-1q
5
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
1506
МАЯНЦЕВ, ТОЧИЛИН
Рассмотрим дифференциальные уравнения (1) в “расширенном” пространстве:
x
A(i)(t)x
C(i)(t)v, t ∈ [t0,t1].
Фазовые ограничения, представленные уравнением наблюдений (2), принимают вид
G(t)x ∈ R(t),
а “расширенные” матрицы задаются следующим образом:
(
)
A(i)(t) d(i)(t) + B(i)(t)u(t) + C(i)(t)q(t)
A(i)(t) =
,
O1×nx
0
(
)
C(i)(t)
C(i)(t) =
,
G(t) =
(-G(t) y(t)),
O1×nv
на неопределённость v наложены поточечные ограничения: v ∈ E(0, Q(t)).
3. Задача синтеза управлений по результатам наблюдений. Зафиксируем целевое
компактное множество X1 ⊂ Ω ⊂ Rnx .
Задача синтеза управлений по результатам наблюдений состоит в построении допусти-
мого управления u∗(π(t)), переводящего траектории системы (1) из произвольной начальной
позиции π0 = {t0, X0} в целевое множество X1 для произвольной допустимой реализации
неопределённостей ζt1 ( · , t0).
Для некоторых π0, X1 сформулированная задача может не иметь решения. В таком случае
будем решать следующую задачу оптимизации: для заданной начальной позиции π0 = {t0, X0}
требуется найти минимальное μ > 0 такое, что существует управление u∗(π(t)), переводящее
позицию π0 в μ-окрестность (в некоторой метрике) множества X1 для любой допустимой
реализации ζt1 ( · , t0).
Согласно общей схеме решения задачи синтеза управлений по результатам наблюдений,
изложенной в [3], эта задача может быть представлена в виде совокупности двух подзадач:
задачи гарантированного оценивания, состоящей в построении информационного множе-
ства X(t,π0) по результатам наблюдений y(τ), τ ∈ [t0,t];
задачи синтеза управлений u∗(π(τ)), решаемой на полуинтервале (t, t1].
Здесь t ∈ [t0, t1] - произвольный промежуточный момент времени.
Далее последовательно рассмотрим указанные подзадачи для рассматриваемой математи-
ческой модели кусочно-линейной системы с переключениями.
4. Задача гарантированного оценивания. Пусть ϕA(x) - какая-либо неотрицательная
гладкая функция, для которой A - следующее её лебегово множество:
A = {ξ: ϕA(ξ) ≤ 0}.
Замечание. В силу неотрицательности функции ϕA(x) неравенство в определении мно-
жества A можно заменить на равенство. При x ∈ A очевидно неравенство ϕA(x) > 0.
Пусть известны начальная позиция π0 = {t0, X0}, наблюдения y(τ) и реализация управ-
ления u(τ), τ ∈ [t0, t]. Рассмотрим следующую функцию цены:
{
∫
t
}
VX (t,x) = max
ϕX0 (x(t0)) + ϕR(τ)(r(τ)) dτ : x(t) = x
(5)
v∈Q(t)
t0
Здесь r(τ) = y(τ) - G(τ)x(τ) - полученное в момент времени τ наблюдение. Функции ϕX0 (·)
и ϕR(·)(·) могут быть различными по форме.
Связь между информационным множеством (4) и функцией цены (5) задаётся следующим
соотношением: X (t, t0, X0) = {x: VX (t, x) ≤ 0}.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1507
Функция цены VX (t, x) в любой точке (t, x), x ∈ int Ω(i), в которой она является диффе-
ренцируемой, удовлетворяет уравнению Гамильтона-Якоби-Беллмана-Айзекса (ГЯБА) [12]
&
∂VX(t,x)
%∂VX(t,x)
+ max
,A(i)(t)x + B(i)(t)u(t) + C(i)(t)v + d(i)(t)
- ϕR(t)(r(t)) = 0
(6)
∂t
v∈Q(t)
∂x
и начальному условию
VX (t0,x) = ϕX0 (x).
Преобразуем уравнение (6):
V ′t + 〈V ′x,A(i)(t)x + B(i)(t)u(t) + d(i)(t)〉 + ρ(V ′x|C(i)(t)Q(t)) - ϕR(t)(r(t)) = 0,
(7)
где V′t и V′x - частные производные VX (t, x) по переменным t и x соответственно, ρ(l|X ) -
значение опорной функции ко множеству X в направлении l.
5. Кусочно-квадратичные функции цены. Построим аппроксимацию функции це-
ны VX (t, x) в классе функций W(i)X(t, x) = 〈x, K(i)X(t)x〉, K(i)X(t) = (K(i)X(t))т ∈ R(nx+1)×(nx+1).
Здесь функция W(i)X(t, x) определена только при x ∈ Ω(i). Матричнозначные функции K(i)X(t)
считаем непрерывно дифференцируемыми всюду на [t0, t1] за исключением, быть может, ко-
нечного числа точек.
Для совокупности функций W(i)X(t, x) при различных i потребуем выполнения условия
“непрерывной склейки”:
W(i)X(t, x) = W(j)X(t, x) для всех t ∈ [t0,t1] и x ∈ H(k),
(8)
здесь H(k) - гиперплоскость переключений, разделяющая области Ω(i) и Ω(j).
Согласно [8] условие (8) будет выполнено, если имеют место равенства
K(i)X(t)Γk = K(j)X(t)Γk для всех t ∈ [t0,t1],
(9)
K(i)(t)Γk =
K(j)(t)Γk для всех t ∈ [t0, t1],
(10)
X
X
где Γk - матрицы параметризации гиперплоскости H(k), т.е.
x ∈ H(k) ⇔ x = Γky,
y = (yт,1)т ∈ Rnx.
При выполнении условий “непрерывной склейки” (9), (10) получается непрерывная кусоч-
но-квадратичная функция WX (t, x):
WX (t, x) = W(i)X(t, x) = 〈x,K(i)X(t)x〉, t ∈ [t0,t1], x ∈ Ω(i), i = 1,N,
(11)
дифференцируемая по любому ненулевому направлению ℓ = (ℓt, ℓx):
W′X (t, x;ℓ) = ℓt〈x,K(i)X(t)x〉 + 2〈ℓx,K(i)X(t)x〉, ℓt ∈ R, ℓx ∈ Rnx+1.
6. Внешняя аппроксимация информационного множества. Рассмотрим задачу га-
рантированного оценивания в новых, “расширенных”, переменных x из начального множества
X0×{1}. Положи
VX (t, x) = VX (t,x) - функция цены в “расширенном” пространстве. В таком
случае уравнение (7) принимает вид
V′t +
V′˜x
A(i)(t)x〉 +
V′˜x,Q(i)(t
V ′˜x〉1/2 - ϕR(t)( G(t)x) = 0,
(12)
где
V′t,
V ′˜x - частные производные функции
VX (t, x), а Q(i)(t)
C(i)(t)Q(t)
C(i)(t))т.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
5∗
1508
МАЯНЦЕВ, ТОЧИЛИН
Выберем функцию ϕR(t)(r) следующим образом:
ϕR(t)(r) = (〈r, R-1(t)r〉 - 1)+ ≥ 0.
Тогда
ϕR(t)(G(t)x) = 〈x, R(t)x〉+, R(t) =Gт(t)R-1(t)G(t) - diag(0, . . . , 0, 1).
Заметим, что 〈x, R(t)x〉 ≥ -1 для любого x, причём равенство достигается при
G(t)x = 0.
Используем далее принцип сравнения [5, 10] для построения внешней аппроксимации ин-
формационного множества X (t, t0, X0). Этой аппроксимации соответствует нижняя оценка
функци
VX (t, x). Приведём способ построения такой оценки WX (t, x), заданной в виде непре-
рывной кусочно-квадратичной функции (11), удовлетворяющей условиям “непрерывной склей-
ки” (9), (10).
Пусть в начальный момент времени t0 верно неравенство
WX (t0, x) ≤ ϕX0 (x)
VX (t0, x) для всех x ∈ Ω.
(13)
В частном случае, когда множество X0 является эллипсоидом E(x0, X0), можно взять
(
)
X-10
-X-10x0
K(i)X(t0) =
,
i = 1,N.
−xт0X-10
xт0X-10x0 - 1
Запишем левую часть уравнения ГЯБА (12) в области Ω(i) для функции WX (t, x) - иско-
мой оценки снизу функци
VX (t, x):
K(i)
〈x,
(t)x〉 + 〈x, (K(i)X(t
A(i)(t) +
A(i)(t))тK(i)X(t))x〉 +
X
+ 2〈x, K(i)X (t)Q(i)(t)K(i)X (t)x〉1/2 - 〈x, R(t)x〉+,
(14)
здесь ∂WX (t, x)/∂t = 〈x,K(i)X(t)x〉,
∂WX(t, x)/∂x = 2K(i)X(t)x.
Воспользуемся следующими неравенствами:
1
〈x, K(i)X(t)Q(i)(t)K(i)X(t)x〉1/2 ≤ γ(i)(t) +
〈x, K(i)X(t)Q(i)(t)K(i)X(t)x〉,
(15)
4γ(i)(t)
〈x, R(t)x〉+ ≥ β(t)〈x, R(t)x〉 = 〈x, β(t)R(t)x〉,
(16)
справедливыми для любых скалярных функций γ(i)(t) > 0 и β(t) ∈ [0, 1].
В неравенстве (15) равенство достигается при
1
γ(i)(t) =
〈x, K(i)X(t)Q(i)(t)K(i)X(t)x〉1/2.
2
Неравенство (16) обращается в равенство на границе и вне “эллипсоида наблюдений” R(t)
при β(t) = 1, во внутренних точках R(t) при β(t) = 0.
Используя (15), (16), получаем оценку сверху для (14):
〈x,
K(i)X(t) + F(i)X(t) - β(t)R(t))x〉 + 2γ(i)(t), x ∈ Ω(i),
1
F(i)X(t) = K(i)X(t
A(i)(t) +
A(i)(t))тK(i)X(t) +
K(i)X(t)Q(i)(t)K(i)X(t).
(17)
2γ(i)(t)
Введём следующие обозначения:
R(i)X(t) =
K(i)(t) + F(i)X(t) - β(t)R(t),
(18)
X
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1509
α(i)X(t) = max{〈x,R(j)X(t)x〉 + 2γ(j)(t): j ∈ Ii(t), x ∈ Ω(j)}, t ∈ [t0,t1], α(i)X(t0) = 0.
(19)
Здесь множество Ii(t) ⊂ {1, . . . , N} зависит от взаимного расположения гиперплоскостей
переключений H(k) и содержит все значения индекса j такие, что
существуют τ0 ∈ [t0, t), x0 ∈ Ω(j) и v(·), для которых x(t, τ0, x0)|u(·),v(·) ∈ Ω(i).
Теорема 1. Пусть при t ∈ [t0, t1] заданы некоторые управление u(π) ∈ Uf , непрерывные
положительные функции γ(i)(t), i = 1, N, и функция β(t) ∈ [0, 1]. Пусть матричнозначные
функции K(i)X(t), i = 1, N , дифференцируемы всюду на [t0, t1] за исключением, быть может,
конечного числа точек и почти всюду удовлетворяют условиям “непрерывной склейки” (9),
(10), а матрицы K(i)X(t0) таковы, что выполняется неравенство (13). Функции α(i)X(t) яв-
ляются решениями задач Коши (19). Тогда при любом t ∈ [t0, t1] множество
⋃
Xext
(t) :=
{x ∈ Ω(j) : WX (t, x) ≤ α(j)X(t)}
β,γ(i)
j
является надмножеством информационного множества X (t, t0, X0), т.е.
X (t, t0, X0) ⊆ Xext
(t) при любом t ∈ [t0, t1].
(20)
β,γ(i)
Доказательство включения (20) проведём для t = t1. Для всех остальных значений t
доказательство аналогично.
Для произвольных вектора x1 ∈ X (t1, t0, X0)
⋂Ω(i1) и допустимой помехи v(·) рассмотрим
решение x(t) = x(t, t1, x1)|u(·),v(·) замкнутой системы. Очевидно, что
x(t0) ∈ X0, а значит, из
неравенства (13) вытекает оценка WX (t0, x(t0)) ≤ 0.
Используя свойство дифференцируемости кусочно-квадратичной функции WX (t, x) по
направлениям, оценим её изменение вдоль траектории {t, x(t)}. Пусть ℓ(t) = (ℓt(t), ℓx(t)),
ℓt(t) = 1, ℓx(t)
A(i(t))(t)x(t)
C(i(t))(t)v(t). Тогда
∫t1
∫t1(
K(i(t))
WX (t1, x(t1)) - WX (t0, x(t0)) = W′X (t, x(t);ℓ(t))dt =
ℓt(t)〈x(t),
(t)x(t)〉 +
X
t0
t0
)
∫t1
+ 2〈ℓx(t), K(i(t))X(t)x(t)〉 dt ≤
(〈x, R(i(t))X(t)x〉 + 2γ(i(t))(t)) dt ≤
t0
∫t1
≤ max{〈x,R(j)X(t)x〉 + 2γ(j)(t): j ∈ Ii1 (t), x ∈ Ω(j)}dt = α(i1)X(t1).
t0
Отсюда следует, что
WX (t1, x(t1)) ≤ α(i1)X(t1) + WX (t0, x(t0)) ≤ α(i1)X(t1).
Таким образом, x1 ∈ Xext
(t1). Теорема доказана.
β,γ(i)
7. Задача синтеза управлений. Сформулируем задачу синтеза управлений по резуль-
татам наблюдений в пространстве информационных множеств: для заданной начальной по-
зиции π(t) = {t, X }, целевого множества X1 и величины μ ≥ 0 требуется построить позицион-
ное управление u∗(π(τ)), τ ∈ [t, t1], переводящее позицию π(t) в μ-окрестность (в некоторой
метрике) множества X1 для любой допустимой реализации неопределённостей ζt1 ( · , t).
Среди всех значений μ ≥ 0, для которых задача синтеза разрешима, требуется указать
наименьшее.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
1510
МАЯНЦЕВ, ТОЧИЛИН
Слабо инвариантным множеством Wμ(t) = Wμ(t, t1, X1) системы (1) относительно мно-
жества X1 назовём совокупность множеств X ⊂ Ω, для которых при заданном μ ≥ 0 разре-
шима задача синтеза управлений из начальной позиции {t, X }.
Для решения задачи синтеза управлений по результатам наблюдений будет использован
метод экстремального прицеливания [6, 3] информационного множества X (t) (его внешней
оценки) на множество Wμ(t) (его внутреннюю оценку): необходимо построить многозначное
управление U(π(t)), которое в каждый момент времени t не увеличивает расстояние между
множествами X (t) и Wμ(t).
Отметим, что определение управления U(π(t)) - задача в бесконечномерном пространст-
ве (в силу бесконечномерности Wμ(t)), что существенно усложняет вычисления. В случае
линейных систем, согласно [3], можно перейти к конечномерной задаче, рассматривая вместо
Wμ(t) множество разрешимости Wμ(t) = Wμ(t,t1,X1) системы (1) без учёта наблюдений,
т.е. множество, выпущенное (в обратном времени) из позиции {t1, X1}. Для этого множества
верно соотношение
}
⋃{⋃
Wμ(t) =
{x: x ∈ X }: X ∈ Wμ(t)
Построению внутренних аппроксимаций Wint
(t) множества Wμ(t) кусочно-линейной
μ,γ(i)W,S(i)
системы (1) посвящена работа [8]. В ней, в частности, показано, что оценка Wint
(t) может
μ,γ(i)W,S(i)
быть найдена в виде множества уровня кусочно-квадратичной функции цены:
⋃
Wint
(t) =
{x ∈ Ω(j) : WW (t, x) ≤ α(j)(t) + μ},
μ,γ(i)W,S(i)
j
WW(t, x) = 〈x,K(i)W(t)x〉,
∀t ∈ [t0,t1], x ∈ Ω(i), i = 1,N,
ϕX1 (x) ≤ WW (t1, x) для всех x ∈ Ω,
1
F(i)W(t) = K(i)W(t)D(i)(t) + (D(i)(t))тK(i)W(t) +
K(i)W(t)Q(i)(t)K(i)W(t),
2γ(i)W(t)
1
D(i)(t)
A(i)0(t) -
√
(P(i)(t))1/2(S(i)(t))т, P(i)(t)
B(i)(t)P(t)
B(i)(t))т,
C2x + 1
K(i)
R(i)W(t) =
(t) + F(i)W(t),
W
α(i)W(t) = max{〈x,R(j)W(t)x〉 + 2γ(j)W(t): j ∈ I(i), x ∈ Ω(j)}, t ∈ [t0,t1], α(i)W(t1) = 0.
Здесь Cx > 0 - такая константа, для которой ∥x∥2 ≤ C2x + 1 при всех x ∈ Ω. Конкретная
внутренняя оценка множества разрешимости определяется параметрами: функциями γ(i)W(t) >
> 0 и S(i)(t), i = 1,N, t ∈ [t0,t1], причём (S(i)(t))т = (S(i)(t))-1.
8. Метод экстремального прицеливания. Зафиксируем параметры - функции β(t),
γ(i)(t), γ(i)W(t), S(i)(t), t ∈ [t0, t1], i = 1, N , задающие внешнюю оценку информационно-
го множества и внутреннюю оценку множества разрешимости. Для краткости через X (t) и
Wμ(t) будем обозначать множества Xext
(t) и Wint
(t) соответственно. Введём также
β,γ(i)
μ,γ(i)W,S(i)
следующие обозначения:
W(i)X(t, x) = W(i)X(t, x) - α(i)X(t) = 〈x,K(i)X(t)x〉 - α(i)X(t),
(21)
W(i)W(t, x) = W(i)W(t, x) - α(i)W(t) = 〈x,K(i)W(t)x〉 - α(i)W(t).
(22)
В таком случае множества X (t) и Wμ(t) задаются следующими соотношениями:
⋃
⋃
X (t) = X(i)(t) =
{x ∈ Ω(i) : W(i)X(t, x) ≤ 0},
i
i
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1511
⋃
⋃
Wμ(t) = W(i)μ(t) =
{x ∈ Ω(i) : W(i)W(t, x) ≤ μ}.
i
i
Отметим, что каждое из множеств X(i)(t), Wμi)(t) является выпуклым и компактным.
Рассмотрим полурасстояние между рассматриваемыми множествами, порождаемое кусоч-
но-квадратичными функциями (21), (22):
h(t) = min{μ: X (t) ⊆ Wμ(t)}.
μ≥0
Из определения множеств X (t) и Wμ(t) следует, что
h(t) = max{0,ĥ(t)},
ĥ(t) = maxh(i)(t) = max max
{W(i)W(t, x) : W(i)X(t, x) ≤ 0}.
(23)
i
i
x∈Ω(i)
Случайĥ(t) ≤ 0 соответствует ситуации, когда X (t) ⊂ W0(t).
Нас интересуют такие допустимые управления u∗(π(t)), при которых значение производ-
ˆ
ной
h(t) минимально при любой возможной неопределённости системы, т.е.
ˆ
u∗(π(t)) = {u ∈ P(t): u ∈ Arg min
max
h(t)}.
(24)
u
ζt( · ,t0)
В силу сложной структуры функций h(i)(t) перейдём к рассмотрению функции H(t), яв-
ляющейся верхней оценкой функцииĥ(t):
H(t) = maxH(i)(t) = max max
H(i)(t, x) = max max
{W(i)W(t, x) - W(i)X(t, x)}.
(25)
i
i
x∈Ω(i)
i
x∈Ω(i)
Заметим, что для любых i и x, для которых W(i)X(t, x) ≤ 0, выполнено неравенство
W(i)W(t, x) - W(i)X(t, x) ≥ W(i)W(t, x),
а значит,ĥ(t) ≤ H(t).
Исследуем поведение производной функции H(t). Согласно [13, с. 86] при вычислении
производной операции дифференцирования и максимизации по конечному числу функций
можно поменять местами:
H(t) = max{H(i)(t), i: H(i)(t) = H(t)}.
i
Согласно теореме о дифференцировании максимума функции [14, с. 61] производная H(t)
представляется в виде
(i)
(i)
˙
H(t) = max{W˙
(t, x) -
WX (t, x), x ∈ Ω(
i),
(i, x) ∈ Argmax H(t)}.
(26)
W
(i,x)
Вследствие определения функций W(i)W(t, x) и W(i)X(t, x) для производных в (26) имеем
(i)
(i)
˙
(i)
˙
(i)
WX (t, x) = 〈x,K
(t)x〉 - α(i)X(t),
WW(t, x) = 〈x,K
(t)x〉 - α(i)W(t).
X
W
Переходя от h(t) к H(t) в (24), будем искать управление u∗(π(t)) в виде
u∗(π(t)) = Arg min
max
H(t).
u∈P(t)
ζt( · ,t0)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
1512
МАЯНЦЕВ, ТОЧИЛИН
K(i)
При этом значения
(t),
α(i)W(t) могут быть вычислены заранее согласно приведён-
W
ным выше формулам (подробнее см. в [8]) и доступны при любых i, t. Значения производ-
ных α(i)X(t) в момент времени t при реализовавшихся ранее неопределённостях не зависят от
управляющего параметра.
Максимизация производной
H(t) по всем допустимым помехам равносильна минимизации
выражения 〈x,K(i)X(t)x〉. Используя обозначение (18), заключаем, что минимум достигается
при минимальном значении выражения 〈x, β(t)R(t)x〉, которое, согласно определению R(t),
не менее -1.
Замечание. Указанный минимум соответствует случаю, когда наблюдение y(t) не даёт
никакой новой информации. Более того, значение r(t) в (3) является центром эллипсоида
R(t).
Таким образом,
u∗(π(t)) =
{
}
(i)
˙
i)
= Arg min
max
WW(t, x) - 〈x,(R(
(t) - F(i)X(t))x〉 + 1 + α(i)X(t) : (i, x) ∈ Argmax H(t)
(27)
X
u∈P(t)
Формула (27) позволяет в общем случае определить управление в позиционной форме, ми-
нимизирующее отклонение информационного множества от множества разрешимости в смыс-
ле полурасстояния (25). Выражение в (27) допускает дальнейшие преобразования. Для упро-
щения промежуточных выкладок сделаем следующее
Предположение. Для текущей позиции π(t) множество Argmax H(t) состоит из конеч-
ного числа пар (i1, x(i1)), . . . , (iM , x(iM )).
Тогда
{
}
(i)
˙
i)
max
WW(t, x) - 〈x,(R(
(t) - F(i)X(t))x〉 + 1 + α(i)X(t)|(i, x) ∈ Argmax H(t)
=
X
{M∑
(ik )
= max λk
W
(t, x(ik )) - 〈x(ik), (R(ik )X(t) - F(ik )X(t))x(ik )〉 + α(ik )X(t)) + 1 :
W
k=1
}
(λ1, . . . , λM ) ∈ ΛM
,
(28)
где
{
}
∑
ΛM = ξ = (ξ1,... ,ξM )т ∈ RM : ξi ≥ 0, i = 1,M,
ξi = 1
- симплекс.
i=1
Заменим в (27) выражение в фигурных скобках согласно (28). В полученном представлении,
в силу теоремы о минимаксе [14, с. 81-82], можно поменять местами min
и max . После этого
u
λ
подсчитаем внутренний минимум по u. Зависимость от управления имеется лишь в F(ik )X(t),
а именно, в значении матриц
A(ik)(t). Представим
A(ik)(t) в виде суммы:
(
)
A(ik)(t) d(ik)(t) + C(ik)(t)q(t)
A(ik)(t)
A(ik)0(t)
A(ik)u(t),
A(ik)0(t) =
,
O1×nx
0
(
)
(
)
Onx×nx B(ik)(t)u
A(ik)u(t) =
B(ik)(t)u
= O(nx+1)×nx
O1×nx
0
Учитывая определение (17) матриц F(ik)X(t), получаем, что требуется минимизировать по u
выражение
∑
∑
λk〈x(ik),K(ik)X(t
A(ik)u(t)x(ik)〉 =
λk〈x(ik),K(ik)X(t
B(ik)(t)u〉.
k=1
k=1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1513
В результате приходим к следующему управлению:
⎧
⎨
P (t)ℓ∗
p(t) -
,
ℓ∗ = 0,
u∗(π(t)) =
〈ℓ∗, P (t)ℓ∗〉1/2
(29)
⎩
E (p(t), P (t)),
ℓ∗ = 0,
∑M
где ℓ∗ =
λk
B(ik)(t))тK(ik)X(t)x(ik). При найденном управлении верно равенство
k=1
∑
λk〈x(ik),K(ik)X(t
A(ik)u(t)x(ik)〉 = 〈ℓ∗,p(t)〉 - 〈ℓ∗,P(t)ℓ∗〉1/2.
k=1
Итоговое выражение для производной полурасстояния имеет вид
{M∑
K(ik)
minH = max
λk(〈x(ik),
(t)x(ik )〉 - α(ik )W(t) - 〈x(ik ), (R(ik )X(t) - F(ik )X,0(t))x(ik )〉 +
W
u
k=1
}
+ ˙α(ik )X(t)) + 1 + 2〈ℓ∗, p(t)〉 - 2〈ℓ∗, P (t)ℓ∗〉1/2 : (λ1, . . . , λM ) ∈ ΛM
(30)
Далее необходимо решить задачу максимизации вогнутой функции на ограниченном компакт-
ном множестве ΛM и найти соответствующий максимизатор (λ∗1, . . . , λ∗M ). После его подста-
новки в выражение для ℓ∗ из (29) получим итоговое позиционное управление.
Заметим, что максимизатор (λ∗1, . . . , λ∗M ) в (30) может быть выбран таким образом, чтобы
он непрерывно зависел от текущей позиции π(t), а значит, и от неизвестной величины x(t) -
решения системы (1). После подстановки такого максимизатора в управление (29) получаем
многозначное отображение с выпуклыми компактными значениями, полунепрерывное сверху
по x. Следовательно, после подстановки такого управления в систему (1) для полученных
дифференциальных включений будет выполнена теорема о существовании решений [15, с. 60-
61], т.е. найденное управление является допустимым.
Общий случай, когда сделанное предположение не выполняется, может быть разобран ана-
логичным образом, при помощи замены суммы по различным максимизаторам (ik, x(ik )) на
сумму интегралов по множеству максимизаторов.
9. Априорная оценка качества управления. Полученное выше позиционное управ-
ление (29) минимизирует производную
H(t). Однако нельзя утверждать, что эта производ-
ная будет неотрицательна. Таким образом, при t ∈ [t0, t1] может накапливаться погрешность,
увеличивающая размеры окрестности целевого множества, попадание в которую можно гаран-
тировать. Для априорной оценки размеров такой окрестности поступим следующим образом.
Пусть π(t0) - известная начальная позиция. Воспользуемся формулам из п. 6 для постро-
ения оценок информационных множеств
X (t), t ∈ [t0, t1]. При построении этих множеств
используем управление (29), а также наиболее неблагоприятные наблюдения:
G(t)x(t) ≡ 0.
Для информационной трубки
X (t) подсчитаем соответствующую величину
∫t1
ˆ
Ĥ(t1) =Ĥ(t0) +
H(τ) dτ.
t0
Теорема 2. Для любых допустимых погрешностей ζt1 ( · , t0) управление (29) переведёт
любую соответствующую траекторию кусочно-линейной системы (1) в μ-окрестность це-
левого множества, где μ ≤Ĥ(t1).
Доказательство этого утверждения следует из того, что информационные множества
X (t), t ∈ [t0, t1], использующие реально поступающую информацию об измерениях (2), удо-
влетворяют при всех t ∈ [t0, t1] включению X (t) ⊆
X (t). Тогда в силу равенств (25) заклю-
чаем, что H(t) ≤Ĥ(t1) для всех t ∈ [t0, t1]. Наконец, из (23) вытекает двойное неравенство
μ ≤ h(t1) ≤ H(t1) ≤Ĥ(t1).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
1514
МАЯНЦЕВ, ТОЧИЛИН
10. Пример. Рассмотрим кусочно-линейную систему (1), состоящую из трёх подсистем:
x = A(i)x + Bu + Cv, t ∈ [0,3], i = 1,2,3.
Уравнение измерений (2) имеет вид
y(t) = Gx(t) + w = x1(t) + x2(t) + w.
Матрицы A(i), B, C, G следующие:
(
)
(
)
(
)
(
)
(
)
)
0
1
0
1
0
1
0
0.1
A(1) =
,
A(2) =
,
A(3) =
,
B=
,
C =
,
G=
(1
1
0
0
-1
0
1
-1
1
0.2
Начальное X0 = E(x0, X0) и целевое X1 = E(x1, X1) множества заданы равенствами
(
)
(
)
(
)
(
)
-2.0
1
0
1.5
1
0
x0 =
,
X0 = 0.3
,
x1 =
,
X1 = 0.5
0
0
1
0
0
1
На управление u, неопределённость v и погрешность w наложены ограничения:
|u| ≤ 1,
|v| ≤ 1,
|w| ≤ 0.2.
Области Ω(i) заданы следующим образом:
Ω(1) = {x ∈ R2 : - 6 ≤ x1 ≤ -1,
|x2| ≤ 6},
Ω(2) = {x ∈ R2 : |x1| ≤ 1,
|x2| ≤ 6},
Ω(3) = {x ∈ R2 : 6 ≥ x1 ≥ 1,
|x2| ≤ 6}.
В качестве начальной (но неизвестной системе) точки выберем значение x(0) = x0. Случай-
ные реализации неопределённости v и помехи w получены с использованием равномерного
распределения.
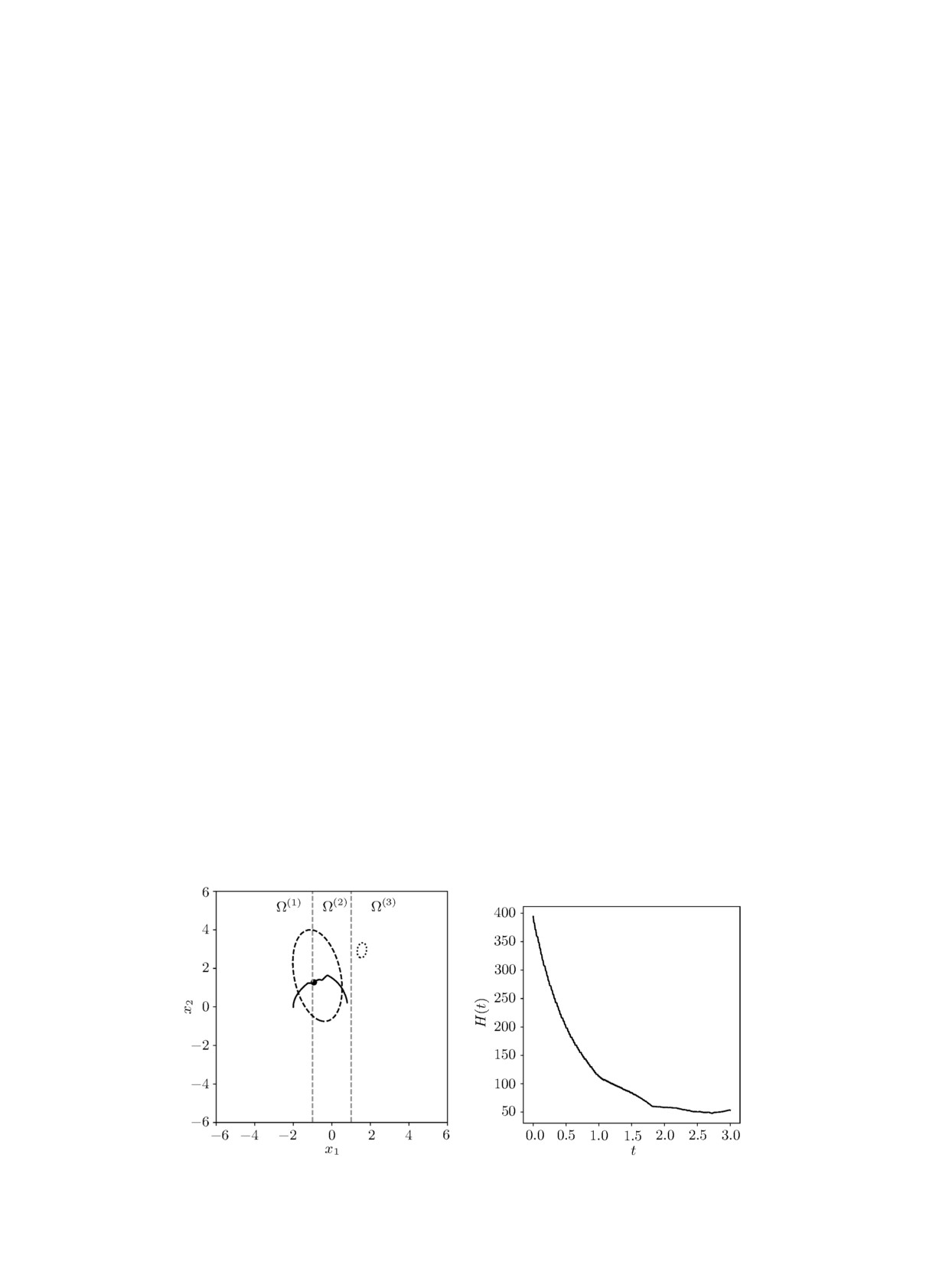
На рис. 1 изображены: траектория системы x(t) с выделенной точкой x(1.5), внешняя
оценка информационного множества X (1.5, t0, X0), внутренняя оценка множества разреши-
мости W(1.5, t1, X1) (лежит в области Ω(3)).
На рис. 2 приведён график функции H(t) - реальное изменение полурасстояния между
множествами по мере обработки поступающих результатов измерений с использованием пред-
ложенного позиционного управления.
Рис. 1. Траектория x(t) системы.
Рис. 2. График функции H(t).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021
ЗАДАЧА УПРАВЛЕНИЯ КУСОЧНО-ЛИНЕЙНОЙ СИСТЕМОЙ
1515
Заключение. В работе получены формулы для построения внешних оценок информаци-
онного множества кусочно-линейной системы с неопределённостями (помехами) в уравнениях
динамики и измерений. Предложен метод для вычисления позиционного управления, решаю-
щего задачу о переводе системы из заданного начального множества в заданное целевое мно-
жество. Рассмотренные в статье вопросы, безусловно, должны быть впоследствии дополнены
эффективными вычислительными схемами и алгоритмами. Их разработка является одной из
ближайших целей авторов.
Работа выполнена при финансовой поддержке Министерства образования и науки Россий-
ской Федерации в рамках реализации программы Математического центра фундаментальной
и прикладной математики по соглашению № 075-15-2019-1621, а также Российского фонда
фундаментальных исследований (проект 19-01-00613а).
СПИСОК ЛИТЕРАТУРЫ
1. Liberzon D. Switching in Systems and Control. Boston, 2003.
2. Куржанский А.Б., Точилин П.А. Слабо инвариантные множества гибридных систем // Диффе-
ренц. уравнения. 2008. Т. 44. № 11. С. 1523-1533.
3. Kurzhanski A.B., Varaiya P. Optimization of output feedback control under set-membership uncertainty
// J. Optim. Theory Appl. 2011. V. 151. № 1. P. 11-32.
4. Куржанский А.Б., Точилин П.А. К задаче синтеза управлений при неопределённости по данным
финитных наблюдателей // Дифференц. уравнения. 2011. Т. 47. № 11. С. 1599-1607.
5. Kurzhanski A.B., Varaiya P. Dynamics and Control of Trajectory Tubes. Theory and Computation.
Basel, 2014.
6. Красовский Н.Н. Управление динамической системой. М., 1985.
7. Точилин П.А. О построении невыпуклых аппроксимаций множеств достижимости кусочно-линей-
ных систем // Дифференц. уравнения. 2015. Т. 51. № 11. С. 1503-1515.
8. Маянцев К.С., Точилин П.А. Об одном методе построения кусочно-квадратичных функций цены
для задачи управления системой с переключениями // Дифференц. уравнения. 2018. Т. 54. № 11.
С. 1497-1507.
9. Чистяков И.А., Точилин П.А. Приближённое решение задачи целевого управления в случае нели-
нейности по одной переменной // Дифференц. уравнения. 2019. Т. 55. № 11. С. 1560-1571.
10. Куржанский А.Б. Принцип сравнения для уравнения типа Гамильтона-Якоби в теории управления
// Тр. Ин-та математики и механики УрО РАН. 2006. Т. 12. № 1. С. 173-183.
11. Куржанский А.Б. Управление и наблюдение в условиях неопределенности. М., 1977.
12. Fleming W.H., Soner H.M. Controlled Markov Processes and Viscosity Solutions. New York, 1993.
13. Демьянов В.Ф. Условия экстремума и вариационное исчисление. М., 2005.
14. Пшеничный Б.Н. Необходимые условия экстремума. М., 1982.
15. Филиппов А.Ф. Дифференциальные уравнения с разрывной правой частью. М., 1985.
Московский государственный университет
Поступила в редакцию 10.05.2021 г.
им. М.В. Ломоносова
После доработки 13.06.2021 г.
Принята к публикации 05.10.2021 г.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 11
2021