ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2021, том 57, № 12, с. 1654-1664
ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
УДК 517.968.4
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
С НАГРУЗКАМИ И БИФУРКАЦИОННЫМИ
ПАРАМЕТРАМИ: ТЕОРЕМЫ СУЩЕСТВОВАНИЯ
И ПОСТРОЕНИЕ РЕШЕНИЙ
© 2021 г. Н. А. Сидоров, Д. Н. Сидоров
Рассматривается нелинейное интегральное уравнение Вольтерры c локальными и/или ин-
тегральными нагрузками на искомое решение, заданными с помощью интеграла Стилтьеса.
Уравнение содержит бифуркационный параметр и при любом его значении имеет триви-
альное решение. Получены необходимые и достаточные условия на те значения параметра
(точки бифуркации), в окрестности которых уравнение имеет нетривиальные непрерыв-
ные вещественные решения. Построены главные члены асимптотики ветвей решений и
указан способ их уточнения. Приведены иллюстрирующие примеры. Установлен принцип
линеаризации, позволяющий находить точки бифуркации, используя только информацию
о линейной части нелинейного уравнения с векторной нагрузкой и векторным бифуркаци-
онным параметром.
DOI: 10.31857/S0374064121120086
Введение. Рассмотрим уравнение
x(t) = L(x(t), xα, t, λ),
(1)
где t ∈ [0, T ], λ ∈ R - бифуркационный параметр, x(t) ∈ C[0, T ] - искомая функция, функ-
ционал xα, называемый в приложениях нагрузкой, задаётся с помощью интеграла Стилтьеса:
∫t2
xα =
x(t) dα(t), где α(t) - заданная функция ограниченной вариации, [t1, t2] ∈ (0, T ). По-
t1
этому нагрузка xα может быть как локальной вида xα = x(α), α ∈ (0, T ), так и нелокальной.
Нелинейное интегральное отображение L(x(t), xα, t, λ) определяется формулой (2) (см. ниже).
Уравнения с нагрузками по свойствам и по области приложений близки нестандартным
дифференциально-интегральным уравнениям [1] и уравнениям нейтрального типа [2]. Отме-
тим, что метод выпуклых мажорант позволяет исследовать области существования нелиней-
ных интегральных уравнений (см., например, [3]). Функционал xα и функция x(t) зависят
от параметра λ. В дальнейшем для упрощения записи эта зависимость не всегда указывается
явно.
В последние годы части этих разделов теорий дифференциальных и интегральных урав-
нений оформились в самостоятельные направления. Однако несмотря на наличие большого
числа работ (см. работы [4-10] и библиографию в них) даже простейшие классы уравнений
Вольтерры с нагрузками и бифуркационными параметрами оставались неизученными. Цель
настоящей работы - указать подход к исследованию таких уравнений достаточно общего вида.
1. Постановка задачи. Пусть выполняется условие
I. Нелинейное отображение L : C[0,T] → C([0,T] × R) имеет вид
∑
L(x(t), xα, t, λ) = a(t, λ)xα +
fik(t,λ)xi(t)xkα +
i+k=l
∫t
∑
+
Kik(t,s,λ)xi(s)xkα ds + R(x(t),xα,t,λ),
(2)
i+k=l
0
1654
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
1655
здесь l и N
- заданные натуральные числа, l ≥ 2, t ∈ [0, T ], функции x(t), fik(t, λ),
Kik(t,s,λ), R(x(t),xα,t,λ) являются непрерывными по совокупности переменных и доста-
точно гладкими по переменной λ ∈ R, которая в приложениях играет роль параметра. Кроме
того, в окрестности точки λ0 предполагается выполненной следующая оценка, указывающая
порядок малости при ∥x∥ → 0, |xα| → 0 нелинейного члена R :
∥R(x(t), xα, t, λ)∥ = O((∥x∥ + |xα|)N+1),
где ∥x∥ = max |x(t)|.
0≤t≤T
Очевидно, что при любом λ уравнению (1), (2) удовлетворяет пара x(t) = 0, xα = 0. Об-
ластью значений отображения L является пространство функций непрерывных по аргументу
t и достаточно гладких по параметру λ.
Определение 1. Точка λ0 называется точкой бифуркации уравнения (1), если для лю-
бых ε > 0, δ > 0 найдутся непрерывная функция x(t) и число λ ∈ R, удовлетворяющие
неравенствам 0 < ∥x(t)∥ < ε, |λ - λ0| < δ и уравнению (1).
В данной работе находятся условия, при выполнении которых точка λ0 ∈ R является
точкой бифуркации уравнения (1), (2) и можно построить асимптотику нетривиальных вет-
вей малых решений уравнения (1), (2). Под ветвью понимается непрерывное вещественное
решение x(t) такое, что x(t) → 0 при λ → λ0 + 0 (или λ → λ0 - 0). Очевидно, что каждому
решению x(t) ставится в соответствие единственная нагрузка с помощью заданного линейного
функционала.
Известно (см., например, [4-7]), что нагруженные уравнения моделируют процессы, состо-
яние которых в какие-либо моменты (или локальные промежутки времени) оказывает влияние
на их протекание в целом. Нагруженным дифференциальным уравнениям (обыкновенным и в
частных производных) посвящено достаточно много работ (см. библиографию в [5]). Но клас-
сы интегральных уравнений Вольтерры с нагрузками и бифуркационный анализ в моделях с
нагрузками в известной нам литературе ранее не изучались.
Мы получим решение поставленной задачи, построив уравнение относительно нагрузки с
бифуркационным параметром λ и исследовав его с помощью метода последовательных при-
ближений, методов степенной геометрии и при помощи вращения конечномерных векторных
полей. Сочетание таких методов восходит к классическим подходам, изложенным в [11-17],
и нашло приложение при решении ряда сложных задач механики, математической физики и
энергетики [1, 17-20].
2. Построение уравнения относительно нагрузки и необходимые условия бифур-
кации. Для большей наглядности предлагаемого подхода сначала проведём его изложение при
наличии только одной нагрузки (т.е. в приведённой выше постановке; случай же, когда λ и
x2 - векторы, рассматривается в п. 5 работы). Используя метод последовательных приближе-
ний и теорему о неявном отображении в аналитическом случае, решение x(t) интегрального
уравнения Вольтерры (1) построим при t ∈ [0, T ] и |λ - λ0| ≤ ρ1,
|xα| ≤ ρ2 в виде ряда
∑
x(t) =
an(t,λ)xnα.
(3)
n=1
Функции an(t, λ) вычислим последовательно, использовав рекуррентные формулы
a1(t,λ) = a(t,λ),
)
n
(n-1∑
1
∂
an(t,λ) =
L
ak(t,λ)xkα,xα,t,λ
,
n = 2,3,...
n! ∂xnα
k=1
xα=0
При этом в силу структуры оператора (2) очевидно, что для первых 2l - 2 коэффициентов
ряда (3) получим простые формулы
a2(t,λ) = ... = al-1(t,λ) ≡ 0,
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
1656
СИДОРОВ Н.А., СИДОРОВ Д.Н.
[
∫
t
]
∑
1
an(t,λ) =
fik(t,λ)ai(t,λ) + Kik(t,s,λ)ai(s,λ)ds ,
n = l,2l - 2.
n!
i+k=n
0
На основании теоремы о неявном отображении ряд (3) сходится в достаточно малой окрест-
ности |xα| ≤ ρ2. Величину ρ2 можно оценить снизу, используя метод выпуклых мажорант
[3, 18]. Эту возможность продемонстрируем ниже в п. 4 при рассмотрении примера 2. Из из-
ложенного вытекает
Лемма 1. Пусть выполнены условия I. Тогда нагрузка xα удовлетворяет уравнению
∑
A1(λ)xα + Ai(λ)xiα = 0,
(4)
i=l
где
t2
∫t2
∫
A1(λ) = a1(t,λ)dα(t) - 1, Ai(λ) = ai(t,λ)dα(t), i = l,l + 1,...
t1
t1
Доказательство вытекает из возможности представления решения x(t) в виде ряда (3)
и задания нагрузки с помощью линейного функционала (интеграла Стилтьеса).
Следствие 1 (необходимое условие бифуркации). Для того чтобы число λ0 могло быть
точкой бифуркации интегрального уравнения (1), (2), необходимо выполнение равенства
A1(λ0) = 0.
Доказательство. Уравнение (4) при каждом λ имеет тривиальное решение xα ≡ 0. Если
A1(λ0) = 0, то при |λ - λ0| ≤ ρ1 в окрестности |xα| < ρ2 на основании теоремы о неявной
функции малое решение уравнения (4) единственно. Следовательно, в этом случае xα ≡ 0
и λ0, согласно определению 1, не является точкой бифуркации уравнения (1). Следствие
доказано.
Следствие 2. Пусть в уравнении (4) все коэффициенты Ai(λ) в точке λ0 равны нулю.
Тогда λ0 будет точкой бифуркации. Более того, уравнение (1), (2) при λ = λ0 имеет c-пара-
метрическое нетривиальное решение x(t,c), зависящее от достаточно малого параметра c.
При 0 < |λ - λ0| < ρ1 других малых решений уравнение (1), (2) не имеет.
Доказательство очевидно, так как в силу условий следствия 2 нагрузка xα при λ =
= λ0 в разложении (3) решения уравнения (1), (2) остаётся произвольным параметром c из
интервала |c| ≤ ρ2, в котором сходится ряд (3). Следствие доказано.
3. Достаточные условия существования точки бифуркации и асимптотика ре-
шений. Конструктивные достаточные условия существования точек бифуркации получим,
определив вещественные решения xα → 0 при λ → λ0 + 0 (λ → λ0 - 0) уравнения (4) и
подставив их в правую часть представления (3). Напомним, что в уравнении (4)
(
∫
α
)
∑
1
Al(λ) =
fik(α,λ)ai(α,λ) + Kik(α,s,λ)ai(s,λ)ds
l!
i+k=l
0
в случае локальной нагрузки и
t2
t
∫
∫
)
∑(
1
Al(λ) =
fik(t,λ)ai(t,λ) + Kik(t,s,λ)ai(s,λ)ds dα(t)
l!
i+k=l
t1
0
в случае интегральной (нелокальной) нагрузки.
В силу леммы 1 для построения асимптотики величины xα следует в уравнении (4) поло-
жить λ = λ0 + μ, где μ - малый вещественный параметр.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
1657
Потребуем выполнения условий.
II. Число λ0 - корень уравнения A1(λ) = 0 кратности p.
III. Имеет место соотношение Al(λ0) = 0.
Тогда уравнение (4) при λ = λ0 + μ преобразуется к виду
(
)
1
A(p)1(λ0)μp + O(|μ|p+1) xα + (Al(λ0) + O(|μ|))xlα + O(|xα|l+1) = 0
(5)
p!
в окрестности точек xα = 0, μ = 0. Решение уравнения (5) будем искать, используя разло-
жение Ньютона-Пьюизё (диаграмма Ньютона определяет показатель p/(l - 1)):
xα = (c0 + O(|μ|))μp/(l-1), c0 = 0.
Очевидно, что значение c0 удовлетворяет уравнению
1 dpA1(λ)
sign μp
c + Al(λ0)cl = 0.
(6)
p! dλp
λ=λ0
Поэтому при нечётном p получаем два уравнения, а именно
1
A(p)1(λ0)c + Al(λ0)cl = 0 при μ > 0,
(7)
p!
1
−
A(p)1(λ0)c + Al(λ0)cl = 0 при μ < 0.
(8)
p!
При нечётном p и любом l уравнение (6) хотя бы в одной из полуокрестностей точки
μ = 0 имеет простой вещественный корень c0 = 0.
Случай 1. При чётном l вещественным корнем уравнения (7) является
√
(p)
1 A
(λ0)
1
c0 =l-1 -
,
p! Al(λ0)
а уравнение (5) имеет вещественное решение xα ∼ c0|μ|p/(l-1) при μ → +0 и соответственно
xα ∼ -c0|μ|p/(l-1) при μ → -0.
Случай 2. При нечётном l и A(p)1(λ0)Al(λ0) < 0 у уравнения (7) будет два вещественных
корня
√
1
A(p)1(λ0)
c0±
=±l-1
,
p!
Al(λ0)
а у уравнения (5) при 0 ≤ μ ≤ ρ1 - два вещественных решения xα± ∼ c0±μp/(l-1) при μ → +0.
Если l нечётно и A(p)1(λ0)Al(λ0) > 0, верен аналогичный результат при -ρ1 ≤ μ ≤ 0.
Из изложенного вытекает
Теорема 1. Пусть выполнены условия I, II, III. Тогда λ0 - точка бифуркации уравне-
ния (1), (2). Более того, при чётном l уравнение (1), (2) имеет в окрестности точки λ0
единственное малое вещественное решение x(t,λ), при этом
√
(p)
1 A
(λ0)
1
x(t, λ) ∼ a1(t, λ0)l-1 -
(λ - λ0)p/(l-1) при λ → λ0.
p! Al(λ0)
При нечётном l уравнение (1), (2) имеет в одной из полуокрестностей точки λ0 два
вещественных решения с аналогичной асимптотикой.
Из доказательства теоремы 1 с учётом следствия 2 вытекает
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
1658
СИДОРОВ Н.А., СИДОРОВ Д.Н.
Теорема 2. Пусть выполнены условия I, II и λ0 - корень уравнения A1(λ) = 0 нечётной
кратности. Тогда λ0 - точка бифуркации уравнения (1), (2).
Теорема 1 с учётом возможности представления других многообразий решений уравнения
(4) в виде разложений Ньютона-Пюизё допускает обобщения.
Действительно, рассмотрим коэффициенты A1(λ), Al(λ), Al+1(λ), . . . , An-1(λ) уравне-
ния (4) и введём условие
IV. Число λ0 является нулём функции Ai(λ) кратности pi, i=1, l, . . . , n-1, а An(λ0) = 0.
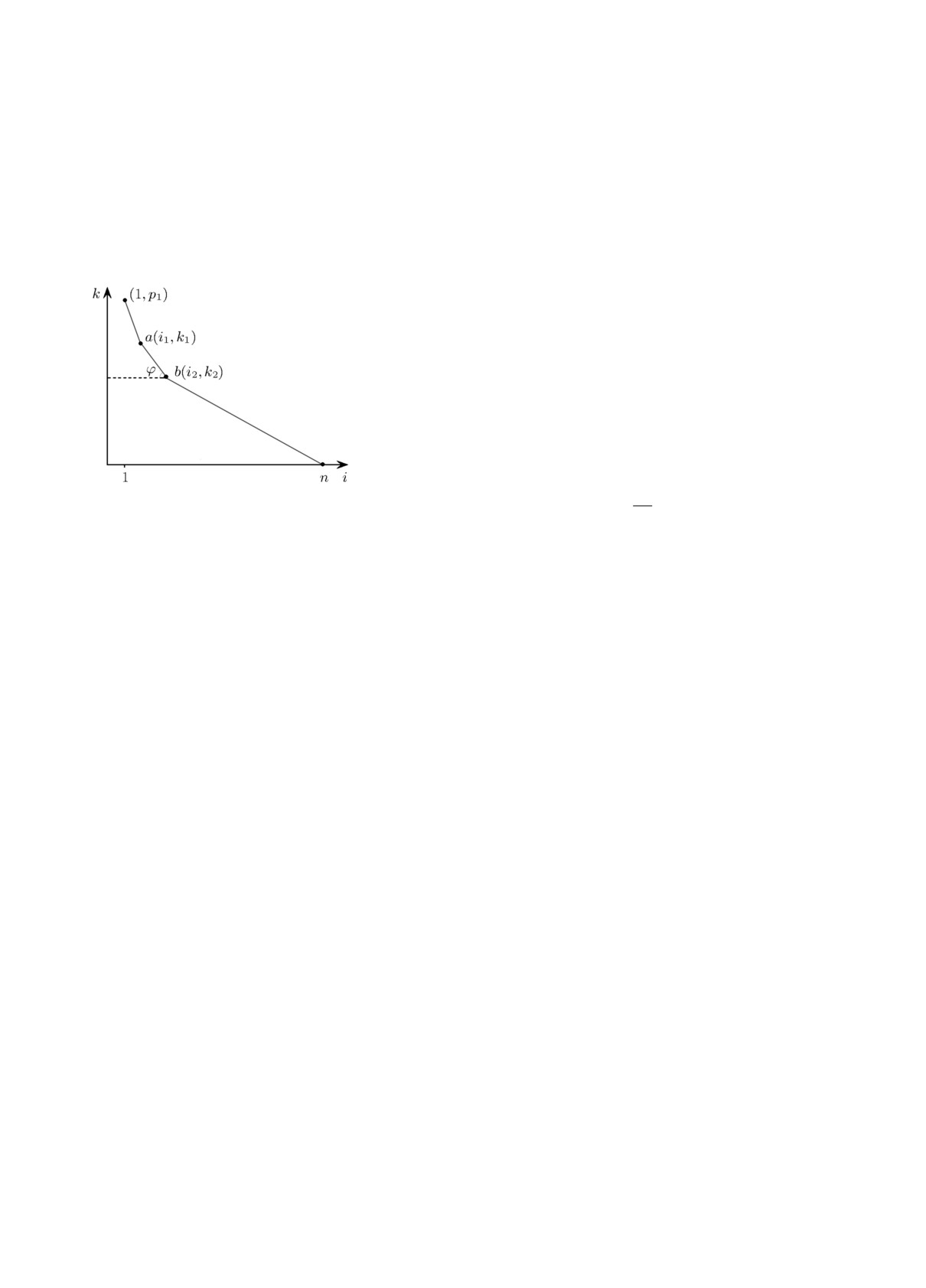
Нанесём на координатную плоскость точки
(1, p1),
(l, pl), . . . , (n - 1, pn-1), (n, 0) и построим диаграмму
Ньютона для этих точек (рисунок).
Возьмём на рисунке грань (a, b). На этой грани лежат
точки (i, pi), удовлетворяющие равенству ir/s + k = θ,
где r/s = tg ϕ, а θ - ордината точки пересечения про-
должения грани (a, b) с осью ординат. Очевидно, что θ
также будет рациональным числом.
Будем искать решение уравнения (4) в виде xα =
= c(μ)|μ|r/s, c(0) = 0. Тогда c(0) должно удовлетворять
по крайней мере одному из двух уравнений
∑
1
Рисунок. Диаграмма Ньютона.
P±(c) :=
sign μk
a(pi)i(λ0)ci = 0.
pi!
ir/s+k=θ
Построив простые вещественные корни c∗ = 0 этих уравнений, запишем, как и в дока-
зательстве теоремы 1, асимптотики малых решений x(t, λ) уравнения (1), (2) в двух полу-
окрестностях точки бифуркации λ0.
4. Построение решений уравнения (1), (2) методом неопределённых коэффи-
циентов. Изложенный выше подход позволяет строить решения уравнения (1), (2) непосред-
ственно в виде ряда по целым или дробным степеням параметра λ - λ0, где λ0 - точка
бифуркации. Коэффициенты ряда, как и в известном методе Некрасова-Назарова [13, 15]
продолжения решения, определяются из рекуррентной последовательности линейных уравне-
ний. Особенность этого аналитического метода состоит в том, что произвольные постоянные
на каждом шаге находятся из условий разрешимости последующих уравнений этой последо-
вательности.
Пример 1 демонстрирует такой способ решения уравнений с нагрузками в условиях теоре-
мы 1, а пример 2 - построение параметрического семейства решений при выполнении условий
следствия 2.
Пример 1. Рассмотрим уравнение
∫t
x(t) = t(λ - 2)x(1) - tsx3(s) ds, t ∈ [0, T ].
(9)
0
Для него находим, что уравнение (4) для нагрузки имеет следующие коэффициенты: A1(λ) =
= λ-3, A3(λ) = -(λ-2)3/5. Поэтому, согласно следствию 1, точкой бифуркации уравнения
(9) может быть только точка λ0 = 3. Для этой точки выполнены условия I, II при p = 1,
l = 3. Следовательно, согласно теореме 1, решение будем искать в виде ряда
∑
x(t) =
an(t)μn/2, где μ = λ - 3.
n=1
Используя метод неопределённых коэффициентов, для вычисления коэффициентов an(t)
получаем последовательность линейных уравнений
∫t
a1(t) = ta1(1), a2(t) = ta2(1), a3(t) = ta3(1) + ta1(1) - tsa31(s)ds,
0
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
1659
∫t
∫
t
a4(t) = ta4(1) + ta2(1) - 3 tsa21(s)a2(s)ds, a5(t) = ta5(1) + ta3(1) - 3 tsa21(s)a3(s)ds, ...
0
0
Следовательно, a1(t) = tc1, a2(t) = tc2, . . . Постоянные c1, c2 определятся из условий
разрешимости последующих урав√ений цепочки. Именно, c1 - из алгебраического уравнения
c1 - c31/5 = 0. Поэтому c1 = ±
5, а интегральное уравнение (9) имеет в положительной
полуокрестности точки бифуркации λ0 = 3 два малых нетривиальных вещественных решения
√
x1,2 ∼ ±t(λ - 3)1/2
5
при λ → 3.
Пример 2. Рассмотрим интегральное уравнение
∫t
x(t) = tb(λ)x(1) - (t - 1)x3(s) ds, t ∈ [0, T ], T > 1.
(10)
0
Пусть b(1) = 1. Тогда, согласно следствию 2, точка λ0 = 1 будет точкой бифуркации уравне-
ния (10). Более того, при λ0 = 1 малое решение этого уравнения можно построить в виде ряда
∑
x(t) = tc +
an(t)cn,
n=3
равномерно сходящегося при t ∈ [0, T ] и |c| ≤ ρ, где ρ > 0 достаточно мало. Коэффициенты
an(t) также легко вычислить методом неопределённых коэффициентов.
Для оценки радиуса ρ сходимости этого ряда построим, следуя [3], мажорирующую си-
стему
r=Tρ+T2r3,
1 = 3T2r2.
√
Пара r∗ = 1/(
3T), ρ∗ = 2r∗/(3T ) удовлетворяет этой системе. Поэтому при |c| ≤ ρ <
√
< 2/(3
3T2) ряд равномерно сходится, а интегральное уравнение (10) в пространстве C[0, T ]
имеет c-параметрическое решение.
5. Интегральные уравнения Вольтерры с векторной нагрузкой и векторным би-
фуркационным параметром. Пусть в уравнении (1) xα = (xα1,... ,xαn ), λ = (λ1,... ,λm).
Значения нагрузки и бифуркационный параметр лежат в окрестностях нулей векторных про-
странств Rn и Rm. Рассмотрим уравнение (1) с правой частью L, которая теперь задаётся
равенством
∑
L(x(t), xα, t, λ) =
bk(t,λ1,... ,λm)xαk +
k=1
[
∑
∑
+
fjk1...kn(t,λ1,...,λm)xj(t)xα11...xαn +
s=l j+k1+...+kn=s
∫t
]
(11)
+ Kjk1,...,kn(t,s,λ1,...,λm)xj(s)xα11...xαnnds,
0
где bk, fjk1,...,kn,Kjk1,...,kn-непрерывныефункции,достаточногладкиеповсемλiвокрест-
ности ∥λ - λ0∥ ≤ δ. Далее, для краткости, (1), (11) обозначает интегральную систему (1) с
правой частью вида (11).
Найдём достаточные условия, когда вектор λ0 ∈ Rm будет точкой бифуркации и можно
построить асимптотику вещественных решений при λi = λ0i + μ, i = 1, . . . , m, где μ ∈ [0, δ]
(или μ ∈ [-δ, 0]).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
1660
СИДОРОВ Н.А., СИДОРОВ Д.Н.
Начнём с построения системы для определения векторной нагрузки. Для этого построим
решение x(t) с помощью ряда
∑
aj(t,λ,xα)
(12)
j=1
по однородным формам компонент векторной нагрузки xα. Здесь aj(t, λ, μxα1 , . . . , μxαn ) =
= μjaj(t,λ,xα1,...,xαn). Отметим, что j-однородные формы вычисляются однозначно ре-
куррентным образом:
∑
a1(t,λ,xα) =
bk(t,λ)xαk ; a1 = ... = al-1 = 0;
k=1
[
∑
1
am(t,λ,xα) =
fjk1,...,kn(t,λ)a1(t,λ,xα)jxα11...xαn +
m!
j+k1+...+kn=m
∫t
]
,
m = l,2l - 1;
+ Kjk1,...,kn(t,s,λ)a1(s,λ,xα)jxα11
...xknαnds
0
)
j
(j-1∑
1
∂
aj(t,λ,xα) =
L
an(t,μxα1 ,... ,μxαn ),μxα,t,λ
,
j = 2l,2l + 1,...
j! ∂μj
n=1
μ=0
Замечание. Последовательность {xm}, где xm(t) = L(xm-1(t), xα, t, λ) при начальном
∑n
приближении x0(t) =
bk(t,λ)xαk и при ∥xα∥ ≤ ρ, равномерно сходится к сумме ря-
k=1
да (12). Поэтому в неаналитическом случае для построения решения и коэффициентов aj
можно использовать метод последовательных приближений.
Лемма 2. Искомая нагрузка xα в решении (12) должна удовлетворять n нелинейным
с параметрами λi уравнениям
∑
A1(λ)xα + Fj(λ,xα) = 0.
(13)
j=l
Здесь Fj = (Fj1, . . . , Fjn)т, λ = (λ1, . . . , λm), Fji, i = 1, n, - j-однородные формы компонент
вектора xα = (xα1 , . . . , xαn ), A1(λ) = [(bk(t, λ), αi)]i,k=1,n - n × n-матрица, αi - линейные
функционалы в пространстве C[0, T ] (интегралы Стилтьеса).
Доказательство леммы проводится применением функционалов α1, . . . , αn к обеим час-
тям равенства (12) с учётом обозначения xαi = (x(t), αi), i = 1, n, для функционалов.
Рассмотрение системы (13) приводит к следующему результату.
Теорема 3 (необходимое условие бифуркации). Для того чтобы вектор λ0 ∈ Rm мог
быть точкой бифуркации интегрального уравнения (1), (11), необходимо выполнение равен-
ства detA1(λ0) = 0.
Доказательство. Вектор λ0 может быть точкой бифуркации уравнения (1), (11) тогда и
только тогда, когда он является точкой бифуркации и системы (13). Но если det A1(λ0) = 0,
то у системы (13) кроме тривиального нет других малых решений, как это следует из теоремы
о неявных функциях. Следовательно, так как ряд (12) устанавливает взаимнооднозначное
соответствие между малым решением интегрального уравнения и малым решением системы
(13), то интегральное уравнение также имеет только тривиальное малое решение x(t) ≡ 0.
Теорема доказана.
6. Достаточное условие бифуркации в векторном случае: принцип линеариза-
ции. Пусть выполнено необходимое условие бифуркации (т.е. теорема 3) и rankA1(λ0) = r.
Пусть {φ1, . . . , φn-r} и {ψ1, . . . , ψn-r} - ортонормированные базисы в подпространствах нулей
N (A1(λ0)) и N (A∗1(λ0)) соответственно.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
1661
∑n-r
Введём квадратную матрицу
A1(λ) = A1(λ) +
(·,φi)ψi порядка n. Отметим, что
i=1
эта матрица обратима, поскольку несложно показать, что однородная система
A1(λ0)l = 0
имеет только тривиальное решение l = 0. Поэтому в силу непрерывности A1(λ) относительно
λ матрица
A1(λ) также обратима по крайней мере в малой окрестности ∥λ - λ0∥ ≤ ρ на
основании теоремы об обратном операторе.
Введём обозначение λ0 + μ := (λ01 + μ, λ02 + μ, . . . , λ0m + μ), вспомогательные параметры
ξ1, ..., ξn-r и запишем систему (13) в виде
∑
∑
A1(λ0 + μ)xα = ξkψk - Fj(λ0 + μ,xα),
(14)
k=1
j=l
где ξi = (xα, φi), i = 1, n - r.
Так как xα → 0 при μ → 0, то параметры ξi являются бесконечно малыми величинами.
Матрица
A1(λ0 + μ) имеет обратную при |μ| < ρ. Поэтому можно построить сходящуюся
последовательность {xnα}, используя рекурсию
∑
∑
xnα =
A1(λ0 + μ)]-1
ξkψk -
A1(λ0
+ μ)]-1
Fk(λ0 + μ, xα-1)
k=1
k=l
при начальном приближении x0α = 0. Тогда lim
xnα = xα. Следовательно,
n→∞
∑
xα =
A1(λ0 + μ)]-1ψkξk + R(ξ1,... ,ξn-r,μ),
(15)
k=1
где ∥R(ξ1, . . . , ξn-r, μ)∥ = O(∥ξ∥l). Подставляя построенный вектор xα в равенство (14), по-
лучаем n - r уравнений для определения компонент вектора ξ(μ):
∑
[
A1(λ0 + μ)-1ψk,φi) - δki]ξk + ri(ξ,μ) = 0,
(16)
k=1
i = 1,n - r, |ri(ξ, μ) = O(∥ξ∥l)|. Найдём достаточные условия, не зависящие от вида нелиней-
ных функций ri(ξ, μ), при выполнении которых μ = 0 будет точкой бифуркации системы (16).
Введём непрерывную функцию
Δ(μ) = det [
A1(λ0 + μ)-1ψk,φi) - δki]n-ri,k=1.
(17)
Ввиду равенства
A1(λ0)φk = ψk верно тождество
A-11(λ0)ψk = φk, k = 1,n - r. Поэтому
lim Δ(μ) = 0 и точка μ = 0 является нулём функции Δ(μ).
μ→0
Пусть выполняется условие
V. Значение μ = 0 является k-кратным нулём функции Δ(μ).
Тогда Δ(μ) ∼ cμk при μ → 0 и diΔ(μ)/dμ|μ=0 = 0, i = 0, k - 1, dkΔ(μ)/dμk|μ=0 = 0. Если
матрица A1(λ + μ) в изолированной особой точке λ0 имеет полный обобщённый жорданов
набор (см. [17, § 30]) из n - r цепочек длины pi, i = 1, n - r, то k = p1 + . . . + pn-r.
Определение 2. Назовём число k корневым числом матрицы A1(λ) в точке λ0.
В монографии [17, гл. 9] показано, что корневое число не зависит в фредгольмовой особой
точке λ0 от выбора базисов в подпространствах N (A(λ0)) и N (A∗(λ0)).
Теорема 4 (принцип линеаризации). Пусть корневое число k матрицы A1(λ) в точке
λ0 нечётное. Тогда λ0 будет точкой бифуркации интегрального уравнения (1), (11).
Доказательство. Вследствие (12), (15) λ0 будет точкой бифуркации уравнения (1), (11)
тогда и только тогда, когда μ = 0 является точкой бифуркации системы (16). Запишем сис-
тему (16) в векторном виде
S(μ)ξ + r(ξ, μ) = 0,
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
1662
СИДОРОВ Н.А., СИДОРОВ Д.Н.
где S(μ) = [
A1(λ0 + μ)-1ψk,φi) - δki]k,i=1,n-r - квадратная матрица, ξ ∈ Rn-r, ∥r(ξ, μ)∥ =
= O(∥ξ∥l). Зададим сколь угодно малые δ > 0 и ε > 0 и введём векторное поле
H(ξ, t) := S((2t - 1)δ)ξ + r(ξ, (2t - 1)δ) : Rn-r × R1 → Rn-r,
определённое при ξ, t ∈ M, где M = {ξ, t : ∥ξ∥ < ε, 0 ≤ t ≤ 1}.
Случай 1. Если существует пара (ξ∗, t∗) ∈ M, для которой H(ξ∗, t∗) = 0, то, согласно
определению 1, точка μ = 0 будет точкой бифуркации системы (16), и теорема 4 справедлива.
Случай 2. Предположим, что H(ξ, t) = 0 при любых (ξ, t) ∈ M и, следовательно, теорема 4
неверна. Ввиду непрерывности поля H(ξ, t) при ξ, t ∈ M поля H(ξ, 0) и H(ξ, 1) гомотопны
на сфере ∥ξ∥ = ε, поэтому их вращения на этой сфере равны между собой, т.е.
J (H(ξ, 0), ∥ξ∥ = ε) = J(H(ξ, 1), ∥ξ∥ = ε).
(18)
В силу малости ε поля H(ξ, 0) и H(ξ, 1) гомотопны своим невырожденным линейным
частям S(-δ)ξ и S(+δ)ξ соответственно, т.е.
J (H(ξ, 0), ∥ξ∥ = ε) = J(S(-δ)ξ, ∥ξ∥ = ε) и J(H(ξ, 1), ∥ξ∥ = ε) = J(S(+δ)ξ, ∥ξ∥ = ε).
В силу условия V имеем det S(-δ) ∼ c(-δ)k и det S(+δ) ∼ c(+δ)k. Поэтому по теореме
Кронекера об индексе получаем
J (S(-δ)ξ, ∥ξ∥ = ε) = sign (-δ)k, J(S(+δ)ξ, ∥ξ∥ = ε) = sign (+δ)k.
В силу нечётности k приходим к равенствам
J (S(-δ)ξ, ∥ξ∥ = ε) = -1, J(S(+δ)ξ, ∥ξ∥ = ε) = +1,
а значит, равенство (18) невозможно. Следовательно, при нечётном k найдётся пара (ξ∗, t∗) ∈
∈ M, для которой H(ξ∗,t∗) = 0 и, согласно определению 1, точка μ = 0 является точкой
бифуркации системы (16), а точка λ0 - точкой бифуркации интегрального уравнения (1), (11).
Теорема доказана.
Замечание. Из теоремы 4 в случае одной нагрузки как следствие вытекает справедливость
теоремы 2.
Следствие 3. Пусть для уравнения (1), (11) det A1(λ0) = 0, rank A1(λ0) = r, а {φi}n-r1
и {ψi}n-r1 - базисы в подпространствах N (A1(λ0)) и N (A∗1(λ0)) соответственно. Если при
этом n - r - нечётное число и det [(A(1)1(λ0)φ1,ψk)]n-ri,k=1 = 0, то λ0 - точка бифуркации
этого уравнения.
Доказательство. В условиях следствия 3 в изолированной фредгольмовой точке λ0 мат-
рица A1(λ0 + μ) при |μ| < r не имеет присоединённых элементов. Поэтому векторы φ1,
..., φn-r составляют её полный обобщённый жорданов набор и корневое число k равно n-r.
Таким образом, условия теоремы 4 выполнены. Следствие доказано.
Следствие 4. Пусть для уравнения (1), (11) det A1(λ0) = 0, rank A1(λ0) = r, а {φi}n-r1
и {ψi}n-r1 - базисы в подпространствах N (A1(λ0)) и N (A∗1(λ0)) соответственно.
Пусть, кроме того,
[
]n-r
dj
dp
A1(λ)φi|λ=λ0 = 0, j = 0,p - 1, i = 1,n - r, и det
〈A1(λ)φi, ψj 〉
= 0,
dλj
dλp
i,j=1
λ=λ0
а число p(n - r) - нечётное. Тогда λ0 - точка бифуркации уравнения (1), (11).
Доказательство. В условиях следствия 4 у функции Δ(μ), определённой выше формулой
(17), точка μ = 0 является p(n - r)-кратным нулём. Так как число p(n - r) нечётно, то
справедливость следствия 4 вытекает из доказательства принципа линеаризации. Следствие
доказано.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
НЕЛИНЕЙНЫЕ УРАВНЕНИЯ ВОЛЬТЕРРЫ
1663
Принцип линеаризации является достаточным условием существования точки бифурка-
ции, при проверке которого используется только информация о линейной части уравнения
(1), (11). При выполнении условий теоремы 4 уравнение (1), (11) с n нагрузками может иметь
многообразие малых вещественных решений x(t, λ0), зависящих от n - r малых параметров,
где r - ранг матрицы A1(λ0), а λ0 - точка бифуркации.
Далее, как и в п. 3, получим в векторном случае достаточные условия, когда нетривиальные
вещественные решения x(t, λ) → 0 при λ → λ0 можно построить по крайней мере в одной из
полуокрестностей точки бифуркации, используя дополнительную информацию о нелинейной
части уравнения (1), (11).
Так как ряд (12) устанавливает взаимнооднозначное соответствие между решениями урав-
нения (1), (11) и системы (13), то для построения указанных решений уравнения (1), (11)
достаточно уметь строить вещественное решение xα → 0 при λ → λ0 + 0 (λ → λ0 - 0)
системы (13).
Пусть для системы (13) выполняется условие
VI. При μ → 0 справедливы асимптотические оценки
A1(λ0 + μ)xα ∼F1p1 (λ0)-1xαμp1 , Fi(λ0 + μ,xα) ∼ Fipi (λ0,xα)μpi, i = l,l + 1,...
При этом pi > 0, i = 1, l, l + 1, . . . , n - 1, pn = 0, F1p1 - n × n-матрица, Fipi (λ0, xα) -
i-однородные формы относительно компонент вектора нагрузки xα.
Как и в случае одной нагрузки, нанеся на координатную плоскость точки (1, p1), (l, pl),
(l + 1, pl+1), . . . , (n - 1, pn-1), (n, 0) (см. рисунок), построим диаграмму Ньютона и будем
искать вектор нагрузки в виде xα = c(μ)|μ|r/s, c(0) = 0.
Для определения вектора c(0) получим две разные системы - одну для μ > 0, а другую
для μ < 0:
∑
P±(c) :=
sign μkFik(λ0, c) = 0.
k+ir/s=θ
Компоненты векторов Fik(λ0, c) - i-однородные формы относительно вектора c. Построив
простое ненулевое вещественное решение c одной из этих систем, запишем в соответствующей
полуокрестности точки бифуркации λ0 асимптотику
∑
x(t, λ) ∼
bk(t,λ0)c∗k|λ - λ0|rs
k=1
при λ → λ0 + 0 (λ → λ0 - 0) решения интегрального уравнения (1), (11).
Заключение. Предложенный метод позволяет при λ ∈ Rm получить достаточные условия
существования более общих многообразий, а именно кривых и поверхностей бифуркации для
интегро-дифференциального уравнения
dx(t)
+ a(t, λ)x(t) = L(x(t), xα, t, λ), x(0) = 0,
dt
с нагрузками. С его помощью можно провести бифуркационный анализ и более общих классов
дифференциально-операторных уравнений в банаховых пространствах с нагрузками в окрест-
ностях точек ветвления решений, а также решения задачи Коши для дифференциального
уравнения с нагрузками. Результаты работы могут быть применены при анализе нестандарт-
ных нелинейных интегральных моделей с нагрузками, возникающих при исследовании эреди-
тарных процессов в приложениях.
Работа выполнена при финансовой поддержке Министерства науки и высшего образования
Российской Федерации, программы фундаментальных исследований Российской Федерации
на 2021-2030 гг.; проект государственного задания (№ FWEU-2021-0006) с использованием ре-
сурсов ЦКП ”Высокотемпературный контур” (Министерство образования и науки Российской
Федерации, проект 13.ЦКП.21.0038).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021
1664
СИДОРОВ Н.А., СИДОРОВ Д.Н.
СПИСОК ЛИТЕРАТУРЫ
1. Sidorov N., Sidorov D., Sinitsyn A. Toward General Theory of Differential-Operator and Kinetic Models.
V. 97. Book Series: World Scientific Series on Nonlinear Science. Ser. A / Ed. Prof. L. Chua. Singapore;
London, 2020.
2. Ахмеров Р.Р., Каменский М.И., Потапов А.С., Родкина А.Е., Садовский Б.Н. Теория уравнений
нейтрального типа // Итоги науки и техники. Сер. Мат. анал. 1982. Т. 19. С. 55-126.
3. Sidorov D.N., Sidorov N.A. Convex majorants method in the theory of nonlinear Volterra equations
// Banach J. Math. Anal. 2021. V. 6. № 1. P. 1-10.
4. Айда-заде К.Р., Абдуллаев В.М. О численном решении систем обыкновенных дифференциальных
уравнений с неразделенными многоточечными и интегральными условиями // Сиб. журн. вычис-
лит. математики. 2014. Т. 17. № 1. С. 1-16.
5. Нахушев А.М. Нагруженые уравнения и их применения. М., 2012.
6. Дикинов Х.Ж., Керефов А.А., Нахушев А.М. Об одной краевой задаче для нагруженного уравнения
теплопроводности // Дифференц. уравнения. 1977. Т. 12. № 1. С. 177-179.
7. Agarwal P., Baltaeva U., Alikulov Y. Solvability of the boundary-value problem for a linear loaded
integro-differential equation in an infinite three-dimensional domain // Chaos, Solitons & Fractals. 2020.
V. 140. P. 110108.
8. Сидоров Н.А., Сидоров Д.Н. О разрешимости одного класса операторных уравнений Вольтерра
первого рода с кусочно-непрерывными ядрами // Мат. заметки. 2014. Т. 96. Вып. 5. С. 773-789.
9. Сидоров Н.А., Сидоров Д.Н. Существование и построение обобщенных решений нелинейных инте-
гральных уравнений Вольтерры первого рода // Дифференц. уравнения. 2006. Т. 42. № 9. С. 124-129.
10. Sidorov N.A. Special Issue "Solvability of Nonlinear Equations with Parameters: Branching, Regulariza-
tion, Group Symmetry and Solutions Blow-Up". Symmetry, MDPI, 2021.
11. Красносельский М.А. Топологические методы в теории нелинейных уравнений. М., 1956.
12. Dancer E.N. Bifurcation theory // Indiana Univ. Math. 1974. V. 23. № 11. P. 1069-1076.
13. Ахмедов К.Т. Аналитический метод Некрасова-Назарова в нелинейном анализе // Успехи мат.
наук. 1957. Т. 12. Вып. 4 (76). С. 135-153.
13. Брюно А.Д. Степенная геометрия в алгебраических и дифференциальных уравнениях. М., 1998.
15. Люстерник Л.А. Некоторые вопросы нелинейного функционального анализа // Успехи мат. наук.
1956. Т. 11. Вып. 6. С. 145-168.
16. Сидоров Н.А., Треногин В.А. Точки бифуркации нелинейных уравнений // Нелинейный анализ и
нелинейные дифференциальные уравнения / Под ред. В.А. Треногина, А.Ф. Филиппова. М., 2003.
17. Вайнберг М.М., Треногин В.А. Теория ветвления решений нелинейных уравнений. М., 1969.
18. Сидоров Д.Н. Методы анализа интегральных динамических систем / Под ред. А. Лоренци. Иркутск,
2013.
19. Sidorov N., Loginov B., Sinitsyn A., Falaleev V. Lyapunov-Schmidt Methods in Nonlinear Analysis and
Applications. Dordrecht, 2013.
20. Sidorov D., Muftahov I. et al. A dynamic analysis of energy storage with renewable and diesel generation
using Volterra equations // IEEE Trans. on Industr. Inf. 2020. V. 16. № 5. P. 3451-3459.
Иркутский государственный университет,
Поступила в редакцию 07.05.2021 г.
Институт систем энергетики
После доработки 07.05.2021 г.
им. Л.А. Мелентьева СО РАН, г. Иркутск
Принята к публикации 23.11.2021 г.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№ 12
2021