ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2021, том 57, № 8, с.1104-1115
ТЕОРИЯ УПРАВЛЕНИЯ
УДК 517.935.4
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
В ОДНОЙ НЕЛИНЕЙНОЙ СИСТЕМЕ
© 2021 г. А. С. Фурсов, Р. П. Митрев,
П. А. Крылов, Т. С. Тодоров
Рассматривается управляемая нелинейная система, замкнутая обратной связью в форме
двухпозиционного реле с гистерезисом, представляющая собой упрощённую модель одной
термомеханической установки. Получены условия на регулятор и параметры системы, га-
рантирующие существование в этой системе периодического режима.
DOI: 10.31857/S0374064121080124
Введение. В работе [1] рассматривалась заданная на полуоси t ≥ 0 управляемая нели-
нейная система
mÿ(t) + β y(t) + ky(t) = αl-1E(T (t))(Δ - y(t)) - mg,
αγ-1 T˙ (t) + T (t) = u
(1)
с начальными условиями
y(0) = y0,
y(0) = 0, T (0) = T0,
(2)
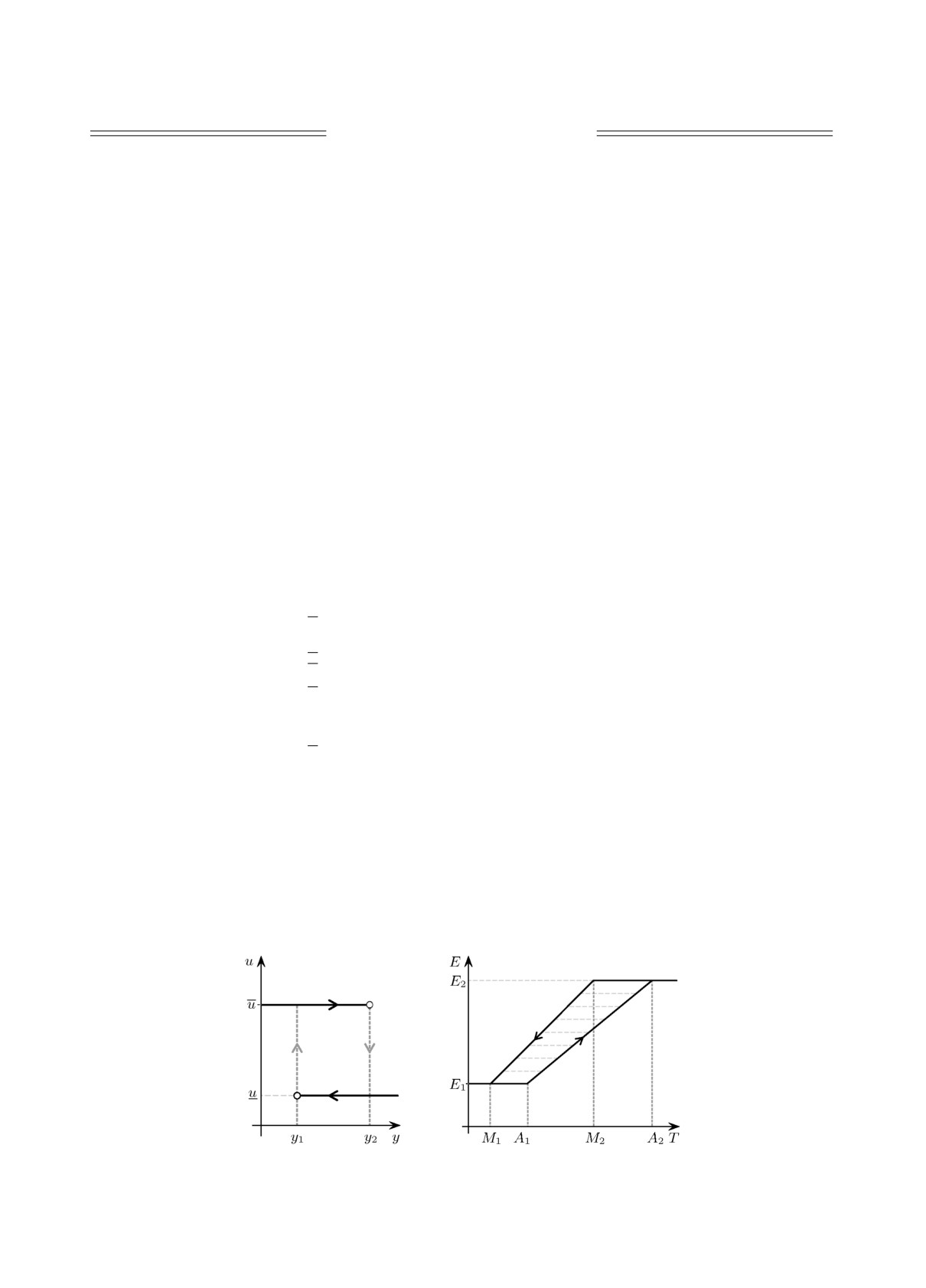
замкнутая обратной связью в форме двухпозиционного реле с гистерезисом (рис. 1):
⎧
⎪u, если y(t) ≤ y1;
⎪
⎪u, если y(t) ≥ y2;
⎪
⎨u, если y(τ) ∈ (y1, y2) при всех τ ∈ [0, t];
u = ur(y(t)) =
u, если y(t) ∈ (y1, y2) и существует s ∈ [0, t) такое, что
(3)
⎪
⎪
y(s) = y1 и y(τ) ∈ (y1, y2) при всех τ ∈ (s, t];
⎪
⎪
,
если y(t) ∈ (y1, y2) и существует s ∈ [0, t) такое, что
⎩u
y(s) = y2 и y(τ) ∈ (y1, y2) при всех τ ∈ (s, t].
Система (1) представляет собой упрощённую модель одной термомеханической установ-
ки [2], для которой используются следующие обозначения: y - выходная переменная, харак-
теризующая величину механической деформации материала с памятью формы [3], при этом
предполагается, что 0 < y0 < Δ; T - температура деформируемого материала, причём T0 ≥ 0;
положительные числа m, β, k, α, l, Δ, γ являются физическими параметрами термоме-
ханической установки; g - ускорение свободного падения; u - управление в форме обратной
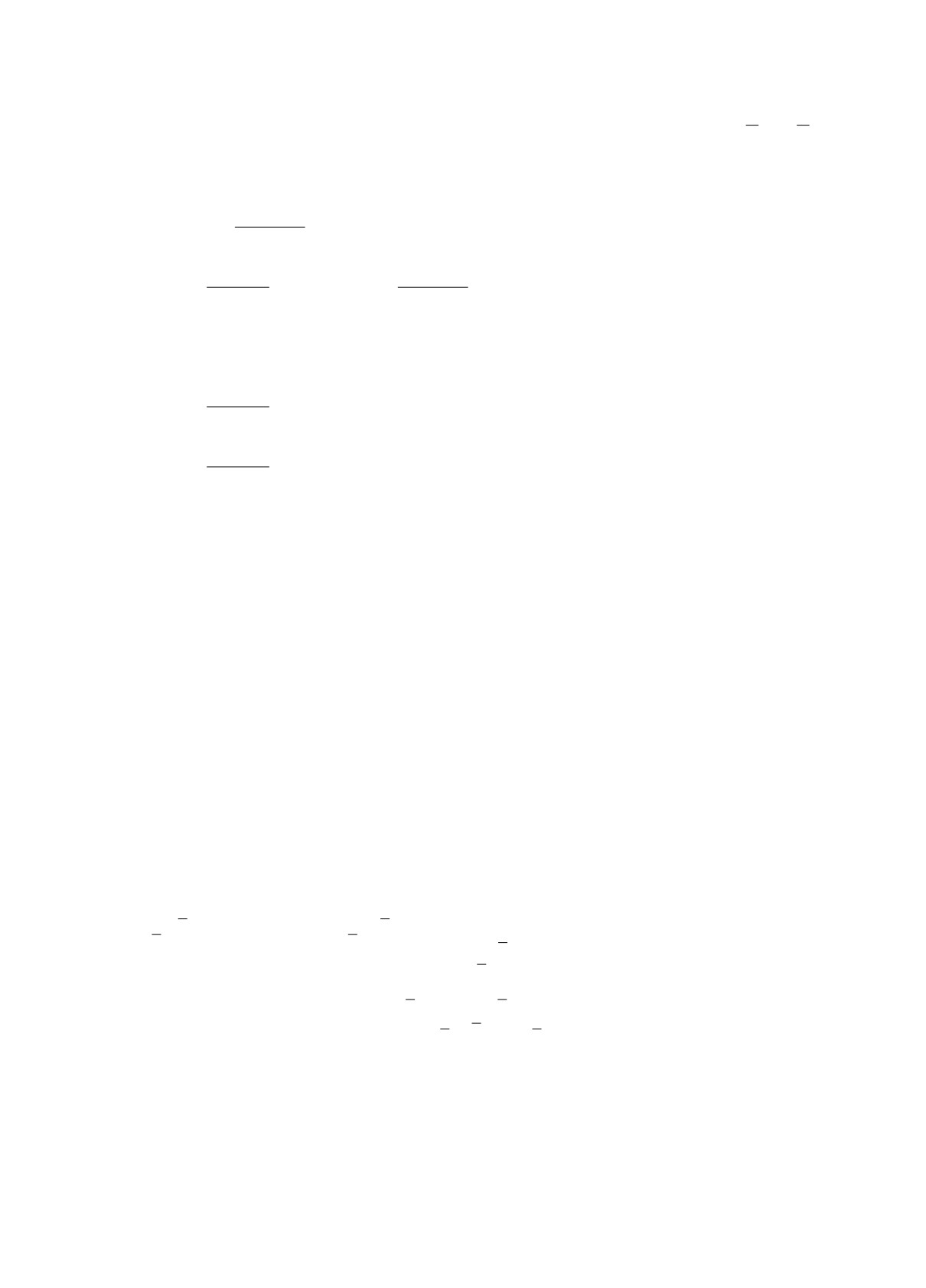
связи по переменной y (u = u(y)); E - модуль Юнга деформируемого материала (нелинейная
характеристика с гистерезисом и насыщением, рис. 2).
Рис. 1. Обратная связь
Рис. 2. Возможный вид характе-
в виде реле.
ристики E(T) с гистеризисом.
1104
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1105
Отображение E(T ) можно рассматривать как многозначное отображение E : R+ → R+
⎧
⎪E1,
если T ≤ M1;
⎪
{
⎪[
]
⎪
T -M1
M2 < A1,
⎪
E1,
(E2 - E1) + E1 ,
если
⎪
M2 - M1
T ∈ (M1,M2];
⎪
⎪
{
⎪[
]
⎪
T -A1
T -M1
A1 ≤ M2,
⎪
(E2 - E1) + E1,
(E2 - E1) + E1 , если
⎪
A2 - A1
M2 - M1
T ∈ (A1,M2];
⎪
⎪
{
⎨
M2 < A1,
E(T ) =
[E1, E2],
если
⎪
T ∈ (M2,A1];
⎪
⎪
{
[
]
⎪
T -A1
M2 < A1,
⎪
⎪
(E2 - E1) + E1, E2 ,
если
⎪
A2 - A1
T ∈ (A1,A2];
⎪
{
⎪[
]
⎪
T -A1
A1 ≤ M2,
⎪
(E2 - E1) + E1, E2 ,
если
⎪
A2 - A1
T ∈ (M2,A2];
⎪
⎪
⎩E2,
если T > A2.
Здесь A1, A2, M1, M2, E1, E2 - положительные константы, определяемые физическими
свойствами материала с памятью формы. Далее будем считать, что они связаны следующими
неравенствами:
0<A1 <A2,
0<M1 <M2, M1 <A1, M2 <A2,
0<E1 <E2.
Отметим, что для каждой конкретной непрерывной функции T (t) из отображения E(T )
выделяется однозначная ветвь, являющаяся непрерывной функцией, множество значений ко-
торой принадлежит отрезку [E1, E2] (см. [1]).
Считаем, что пороговые значения y1, y2, характеризующие управление (3), удовлетворяют
условию 0 < y1 < y2 < Δ.
В работе [1] получены эффективно проверяемые условия на коэффициенты и начальные
значения переменных состояния системы (1), (2) и на параметры регулятора (3), обеспечиваю-
щие возникновение колебательных движений [4, с. 10] в соответствующей замкнутой системе.
При этом в [1] использовалось следующее определение колебательного движения (колебатель-
ного режима). Решение системы (1), (2), т.е пару (y(t), T (t)) функций, удовлетворяющих этой
системе и начальным условиям при управлении u, задаваемом условиями (3), называем коле-
бательным режимом, если найдутся такие положительные константы (параметры режима)
t∗1, t∗2, y, y (0 < t∗1 < t∗2 и 0 < y < y < Δ), что выполняются следующие условия:
1) найдётся момент t ≥ 0, для которого y(t) = y;
2) для любого момента t такого, что y(t) = y, существует момент ξ ∈ [t + t∗1, t + t∗2], при
котором справедливо равенство y(ξ) = y и y(τ) = y для всех τ ∈ (t, t + t∗1);
3) для любого момента t такого, что y(t) = y, существует такой момент ξ ∈ [t + t∗1, t + t∗2],
при котором справедливо равенство y(ξ) = y и y(τ) = y для всех τ ∈ (t, t + t∗1).
Анализируя результаты работы [1], можно утверждать, что проблема определения усло-
вий на параметры замкнутой системы (1)-(3), гарантирующих существование колебательных
режимов, оказалась весьма непростой. Однако с прикладной точки зрения более актуальной
является задача определения условий существования периодического режима для указанной
замкнутой системы.
Основываясь на результатах работы [1], в настоящей статье получены достаточные условия
существования периодического режима в замкнутой системе (1)-(3).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
1106
ФУРСОВ и др.
1. Постановка задачи. Запишем систему (1), (2) в нормальной форме Коши:
x1(t) = x2(t),
(
)
k
α
β
α
x2(t) = -
+
E(x3(t)) x1(t) -
x2(t) - g +
ΔE(x3(t)),
m
lm
m
lm
(4)
γ
x3(t) = -
(x3(t) - u),
α
x1(0) = y0, x2(0) = 0, x3(0) = T0,
где x1 = y, x2 = y, x3 = T, а 0 < y0 < Δ, T0 ≥ 0.
Замкнём систему (4) регулятором (3) и при t ≥ 0 рассмотрим соответствующую замкнутую
систему
x1(t) = x2(t),
(
)
k
α
β
α
x2(t) = -
+
E(x3(t)) x1(t) -
x2(t) - g +
ΔE(x3(t)),
m
lm
m
lm
(5)
γ
x3(t) = -
(x3(t) - ur(x1(t))),
α
x1(0) = y0, x2(0) = 0, x3(0) = T0,
где 0 < y0 < Δ, T0 ≥ 0, для которой будем предполагать, что y0 < y1, T0 < M1. Запишем
замкнутую систему (5) в векторной форме
x(t) = P (x(t), ur), x = (x1, x2, x3)т.
Тогда если выход реле принимает значение u, то считаем, что активной является система
x(t) = P (x(t), u),
(6)
если же выход реле принимает значение u, то считаем, что активной является система
x(t) = P (x(t), u).
(7)
Тогда при заданных начальных условиях x(0) = (y0, 0, T0)т решение замкнутой системы (5)
с учётом того, что y0 < y1, ищется в классе непрерывных вектор-функций x(t) в соответствии
со следующим алгоритмом чередования активных режимов:
⎧
⎪P (x(t), u), если x1(t) ≤ y1;
⎪
⎪P (x(t), u), если x1(t) ≥ y2;
⎨
P (x(t), u), если x1(t) ∈ (y1, y2) и существует s ∈ [0, t) такое, что
x(t) =
(8)
⎪
x1(s) = y1 и x1(τ) ∈ (y1,y2) при всех τ ∈ (s,t];
⎪
⎪
(x(t), u), если x1(t) ∈ (y1, y2) и существует s ∈ [0; t) такое, что
⎩P
x1(s) = y2 и x1(τ) ∈ (y1,y2) при всех τ ∈ (s,t].
При этом в точках разрыва правой части системы (на гиперплоскостях x1 = y1, x1 =
= y2) происходит “склейка по непрерывности” соответствующих решений систем (6) и (7).
Далее определённую на полуоси t ≥ 0 функцию f будем называть Θ-периодической, если
f (t + Θ) = f(t) для всех t ≥ 0.
Сформулируем теперь задачу управления для системы (4).
Задача. Найти ограничения на числовые параметры m, k, α, l, β, Δ, γ системы (4),
а также на параметры y1, y2, u, u регулятора (3), при выполнении которых в замкнутой
системе (5) существует периодическое решение (периодический режим).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1107
2. Периодический режим в системе с программным управлением. Решение постав-
ленной задачи о существовании периодического решения в системе (5) разобьём на несколько
шагов. Вначале исследуем вопрос о существовании периодического решения системы (4), замк-
нутой программным управлением вида
{
u, если t ∈ [qΘ, qΘ + Θ1),
up(t) =
q = 0,1,2,... ; Θ1 + Θ2 = Θ.
(9)
u, если t ∈ [qΘ + Θ1, qΘ + Θ1 + Θ2),
Здесь u, u, Θ1, Θ - положительные параметры указанного программного управления.
Рассмотрим теперь задачу выбора таких параметров управления (9), которые обеспечивают
существование периодического решения в соответствующей замкнутой системе (4), (9).
Прежде всего заметим, что рассматриваемое управление u(t) является кусочно-постоян-
ной периодической функцией с периодом Θ. Покажем, что для любых u, u, Θ > Θ1 > 0
уравнение
γ
x3(t) = -
(x3(t) - up(t))
(10)
α
имеет периодическое решение с периодом Θ. Действительно, при любых t ≥ s ≥ 0 для
решений уравнения (10) справедлива формула Коши
∫t
γ
x3(t) = x3(s)e-γ(t-s)/α + e-γ(t-τ)/α
u(τ) dτ.
(11)
α
s
Пусть x3(0) = T0. Тогда, учитывая, что up(t) ≡ u на промежутке [0, Θ1), и используя фор-
мулу (11), найдём x3(Θ1):
∫Θ1
γ
x3(Θ1) = T0e-γΘ1/α +
u e-γ(Θ1-τ)/α dτ =
α
0
= T0e-γΘ1/α + u(1 - e-γΘ1/α) = u + (T0 - u)e-γΘ1/α.
(12)
Далее, учитывая, что up(t) ≡ u на промежутке [Θ1, Θ), для x3(Θ) получаем
x3(Θ) = u + (x3(Θ1) - u)e-γΘ2/α = u + (u + (T0 - u)e-γΘ1/α - u)e-γΘ2/α =
= u(1 - e-γΘ2/α) + u(1 - e-γΘ1/α)e-γΘ2/α + T0e-γΘ/α.
(13)
Учитывая Θ-периодичность функции up(t), заключаем, что решение x3(t) будет Θ-пери-
одическим, если и только если выполняется равенство x3(Θ) = T0. Тогда из представления
(13) находим начальное условие для Θ-периодического решения xΘ3(t):
-γΘ2/α
u(1 - e-γΘ2/α) + u(1 - e-γΘ1/α)e
T0 = T =
(14)
1-e-γΘ/α
Из равенств (13) и (14) следует, что
-γΘ1/α
u(1 - e-γΘ1/α) + u(1 - e-γΘ2/α)e
xΘ3(Θ1) =
1-e-γΘ/α
Теперь, обозначая T = xΘ3(Θ1) и γ = γ/α, запишем в явном виде Θ-периодическое реше-
ние уравнения (10):
{
u + (T - u)e-γ(t-qΘ),
если t ∈ [qΘ, qΘ + Θ1),
xΘ3(t) =
q = 0,1,2,...
u + (T - u)e-γ(t-qΘ-Θ1),
если t ∈ [qΘ + Θ1, qΘ + Θ),
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
1108
ФУРСОВ и др.
Будем теперь предполагать, что параметры u, u, Θ1, Θ регулятора (9) выбраны так,
что выполняются неравенства
T <M1, T >A2.
(15)
Полагая, что компонента x3 решения замкнутой системы (4), (9) удовлетворяет началь-
ному условию x3(0) = T , рассмотрим её подсистему
x1(t) = x2(t),
(
)
k
α
β
α
x2(t) = -
+
ϕ(t) x1(t) -
x2(t) - g +
Δϕ(t),
(16)
m
lm
m
lm
x1(0) = y0, x2(0) = 0,
где ϕ(t) = E(xΘ3(t)). В силу условий (15) и того, что xΘ3(t) является Θ-периодическим ре-
шением уравнения (10), функция ϕ(t) также будет Θ-периодической, и при этом её можно
описать следующим образом:
⎧
⎪E1,
t ∈ [qΘ,qΘ + ΘA1),
⎪
⎪u + (T - u)e-γ(t-qΘ) - A1
⎪
(E2 - E1) + E1,
t ∈ [qΘ + ΘA1,qΘ + ΘA2),
⎪
A2 - A1
⎨
E2,
t ∈ [qΘ + ΘA2,qΘ + Θ1),
ϕ(t) =
(17)
⎪E2,
t ∈ [qΘ + Θ1,qΘ + ΘM2),
⎪
⎪u + (T - u)e-γ(t-qΘ-Θ1) - M1
⎪
(E2 - E1) + E1, t ∈ [qΘ + ΘM2 , qΘ + ΘM1 ),
⎪
M2 - M1
⎩
E1,
t ∈ [qΘ + ΘM1,qΘ + Θ),
где
1
T -u
1
T -u
ΘA1 =
ln
,
ΘA2 =
ln
,
γ
A1 - u
γ
A2 - u
1
T -u
1
T -u
ΘM1 = Θ1 +
ln
,
ΘM2 = Θ1 +
ln
γ
M1 - u
γ
M2 - u
и учтено, что T0 < M1.
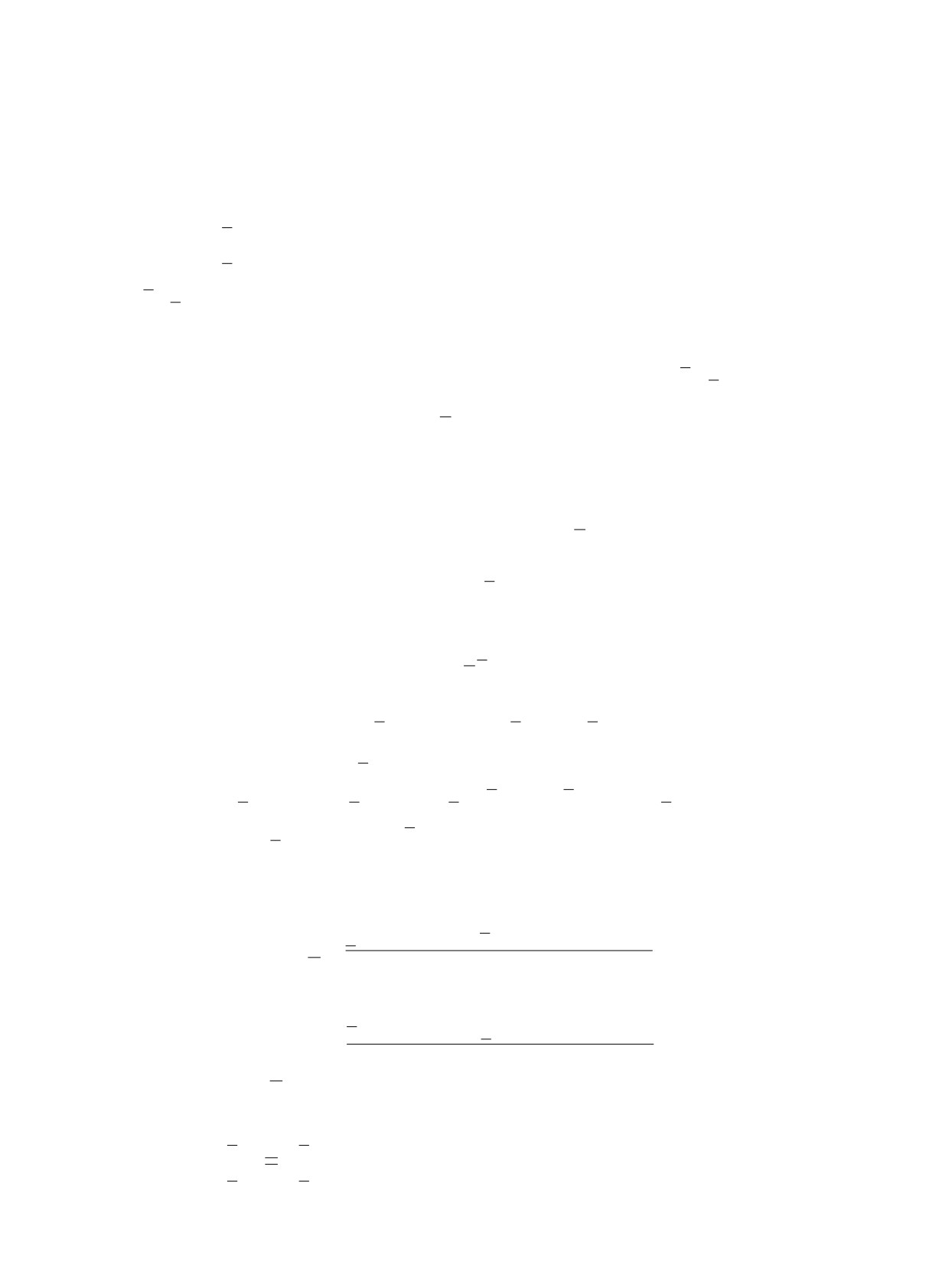
На рис. 3, 4 схематично изображены графики функций xΘ3(t) и ϕ(t) при t ∈ [0, Θ].
Рис. 3. График функции xΘ3(t).
Рис. 4. График функции ϕ(t).
Из сказанного выше следует, что система (16) фактически является линейной нестацио-
нарной системой вида
x(t) = A(t)x(t) + f(t),
(18)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1109
где x = (x1, x2)т,
(
)
(
)
0
1
0
A(t) =
k
α
β
,
f (t) =
α
,
(19)
-
-
ϕ(t)
-
Δϕ(t) - g
m
lm
m
lm
причём матрица A(t) и вектор-столбец f(t) - непрерывные и периодические с периодом Θ
функции, т.е., в частности, A(t + Θ) = A(t), f(t + Θ) = f(t) для любого t ≥ 0.
Известно [5, с. 215], что если линейная однородная Θ-периодическая система
x(t) = A(t)x(t)
(20)
не имеет нетривиального Θ-периодического решения, то соответствующая неоднородная сис-
тема (18) имеет единственное Θ-периодическое решение. Теперь заметим, что если однород-
ная система (20) является асимптотически устойчивой, то она не может иметь нетривиального
Θ-периодического решения.
Получим условия, при которых рассматриваемая линейная однородная система (20) яв-
ляется асимптотически устойчивой. Для этого воспользуемся методом, предложенным в [5,
с. 197]. Рассмотрим систему (20), матрица A(t) коэффициентов которой задана в (19). Эта
система эквивалентна дифференциальному уравнению второго порядка
ÿ(t) + a y(t) + b(t)y(t) = 0,
(21)
где y(t) = x1(t),
y(t) = x2(t), а
β
α
k
a=
,
b(t) =
ϕ(t) +
m
lm
m
Сделаем в уравнении (21) стандартную замену зависимой переменной y = e-at/2z, тогда
(
)
(
)
a
a2
y=
Ż-
z e-at/2 и
ÿ=
z-aŻ+
z e-at/2.
2
4
Поэтому в результате указанной замены уравнение (21) приводится к виду
z(t) + p(t)z(t) = 0,
(22)
где
2
α
k
β
p(t) =
ϕ(t) +
-
lm
m
4m2
В соответствии с результатами, изложенными в монографии [5, с. 202], если для Θ-перио-
дической функции p(t) выполнены неравенства
∫Θ
p(t) ≥ 0,
0 < Θ p(t)dt ≤ 4,
0
то все решения z(t) уравнения (22) ограничены вместе с их производными первого порядка.
Но из ограниченности z(t) и Ż(t) вытекает, что решения y(t) уравнения (21) вместе с их про-
изводными
y(t) стремятся к нулю и, следовательно, система (20) асимптотически устойчива.
Тогда, учитывая, что E1 ≤ ϕ(t) ≤ E2, получаем достаточное условие того, чтобы система (20)
с матрицей коэффициентов A(t), заданной в (19), была асимптотически устойчива:
α
k
β2
α
k
β2
4
E1 +
-
> 0,
E2 +
-
≤
(23)
lm
m
4m2
lm
m
4m2
Θ2
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
1110
ФУРСОВ и др.
Следовательно, при выполнении условия (23) линейная неоднородная система (18) имеет,
и при том единственное, Θ-периодическое решение. Обозначим это решение через xΘ(t) =
= (xΘ1 (t), xΘ2 (t))т.
Таким образом, доказана следующая
Теорема 1. Пусть параметры u, u, Θ1, Θ программного управления (9) для системы
(4) выбраны так, что выполняются следующие условия:
1) справедливы неравенства
-γ(Θ-Θ1)/α
u(1 - e-γ(Θ-Θ1)/α) + u(1 - e-γΘ1/α)e
M1 < T =
,
1-e-γΘ/α
-γΘ1/α
u(1 - e-γΘ1/α) + u(1 - e-γ(Θ-Θ1)/α)e
A2 > T =
;
1-e-γΘ/α
2) имеет место условие (23).
Тогда в системе (4), замкнутой программным управлением (9), существует единствен-
ное периодическое движение xΘ(t) = (xΘ1(t),xΘ2(t),xΘ3(t))т, причём xΘ3(0) = T.
3. Периодический режим в системе с обратной связью. Вернёмся к исходной задаче
(см. п. 2) о построении регулятора в форме обратной связи (3), обеспечивающего существо-
вание периодического режима в замкнутой системе (5). Основная идея решения этой задачи
состоит в выборе параметров обратной связи (3) на основе результатов работы [1], позволяю-
щих гарантировать существование колебательного режима в замкнутой системе (5), а также
на основе рассчитанного, в соответствии с теоремой 1, программного управления (9) и обеспе-
чиваемого им периодического решения xΘ(t).
Итак, на основании теоремы 1 и достаточных условий существования колебательных ре-
жимов, полученных в работе [1], справедлива следующая
Теорема 2. Пусть
1) для параметров системы (4) выполняется неравенство
mg + kΔ
Δ-
> 0;
k + αE1/l
2) спектр каждой матрицы
(
)
(
)
0
1
0
1
kl + αE1
β
,
kl + αE2
β
−
-
-
-
m
m
m
m
лежит на отрицательной полуоси и является простым;
3) параметры u, u, Θ1, Θ удовлетворяют условиям теоремы 1 и, кроме того,
u<M1, u>A2;
4) величины y1 = xΘ1(0), y2 = xΘ1(Θ1) удовлетворяют неравенствам
mg + kΔ
mg + kΔ
y1 > Δ -
,
y2 < Δ -
,
k + αE1/l
k + αE2/l
где xΘ(t) = (xΘ1(t), xΘ2(t), xΘ3(t))т - периодическое решение системы (4), замкнутой программ-
ным управлением (9) с параметрами u, u, Θ1, Θ;
5) для системы (4), замкнутой обратной связью (3) с параметрами u, u, y1, y2, вы-
полняются неравенства
)
(
)2
E2
βC23
(m2g2
αE2
mg
-
< 1,
+
Δ2 ν0 < k Δ +
,
E1
t∗
k
l
k
1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1111
где
{
√
}
1
E1m
t∗
= min
√
, (y2 - y1)
,
1
C2
2m
2E2C1
(
)2
(
)
mg
α
E2
β
√
√α
C1 = k y1 +
+
E2(y1 - Δ)2, C2 =
k+
E2
,
k
l
mE1
√m+
l
√
E1
4mgΔE1
C3 =
,
ν0 = max{Hmax/H0,2}, H0 =
,
E2(k + αE2/l)
k+E1
)2
(
)2}
(E2
{m2g2
α
mg
Hmax =
H∗,
H∗ = max{H∗, H},
H= max
+
E2Δ2,k Δ +
,
E1
k
l
k
)2
}
{(2βC3C4/t∗1
C24
mg
H∗ = max
+ βC23/t∗1
,
,
C4 =
+Δ+y1;
1 - E2/E1
C23
k
6) для момента времени t0 выполняются условия
0 < xΘ1 (t0) < ζ+, xΘ2 (t0) = 0, t0 < ΘA2,
где ζ+ - положительный корень квадратного трёхчлена
(
)2
(
)2
mg
αν0E2
mg
p(ζ) ≡ kν0 ζ +
+
(ζ - Δ)2 - k Δ +
k
l
k
Тогда решение x(t) замкнутой системы (5) с начальными условиями
x1(0) = xΘ1(t0),
x2(0) = xΘ2(t0),
x3(0) = xΘ3(t0)
(24)
является колебательным режимом с параметрами t∗1, t∗2, y1, y2, где
√
t∗1 = (y2 - y1)
m/Hmax
(алгоритм для расчёта константы t∗2 достаточно громоздкий и полностью приведён в [1]).
Кроме того, для решения x(t) верно тождество x(t) ≡ xΘ(t + t0) при t ∈ [0,t∗1].
Теперь покажем, что при некоторых дополнительных условиях на константу t∗1 колеба-
тельный режим
x(t) системы (5) с начальными условиями (24) является, на самом деле,
периодическим режимом. Для этого достаточно установить, что при начальных условиях (24)
переключения реле обратной связи (3) с параметрами u, u, y1, y2, удовлетворяющими усло-
виям теоремы 2, на промежутке [0, Θ] происходят при t1 = Θ1 - t0 и t2 = Θ - t0.
Итак, пусть выполнены условия теоремы 2 и для t∗1 справедливо неравенство
ΘA2 - t0 < t∗1 ≤ Θ1 - t0.
(25)
Тогда в силу колебательности решения x(t) замкнутой системы (5) с начальными условиями
(24) выполнено неравенство
x1(t) < y2, t ∈ [0,ΘA2 - t0].
(26)
Отсюда вытекает, что в силу теоремы 2 при t ∈ [0, ΘA2 -t0] верно тождество x(t) ≡ xΘ(t+t0).
Далее рассмотрим поведение функций x1(t) и
x2(t) на промежутке [ΘA2 - t0, Θ1 - t0].
Прежде всего заметим, что вследствие определения обратной связи (3) тождества
x1(t) ≡
≡ xΘ1 (t+t0) и x2(t) ≡ xΘ2 (t+t0) на промежутке [ΘA2-t0,Θ1-t0] остаются верными вплоть до
момента t∗ ∈ [ΘA2 - t0, Θ1 - t0], для которого выполняется равенство x1(t∗) = xΘ1(t∗ + t0) = y2.
Покажем, что xΘ1(t+t0) = y2 при t ∈ [ΘA2 -t0, Θ1 -t0). Так как ϕ(t+t0) ≡ E2 на промежутке
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
1112
ФУРСОВ и др.
[ΘA2 - t0, Θ1 - t0], то функции xΘ1(t + t0) и xΘ2(t + t0) на нём тождественно совпадают с
соответствующими компонентами x1(t) и x2(t) решения x(t) линейной стационарной системы
x1(t) = x2(t),
)
(27)
(k
α
β
α
x2(t) = -
+
E2
x1(t) -
x2(t) - g +
ΔE2
m
lm
m
lm
с начальными условиями
x1(ΘA2 - t0) = xΘ1(ΘA2 ), x2(ΘA2 - t0) = xΘ2(ΘA2 ).
(28)
Согласно условию 2) теоремы 2 матрица коэффициентов системы (27) является устойчивой и
имеет простой спектр. Покажем, что для решения x(t) этой системы с начальными условиями
(28) выполняется соотношение x1(t) = y2 при t ∈ [ΘA2 - t0, Θ1 - t0).
Действительно, первая компонента x1(t) любого решения x(t) системы (27) обладает свой-
ством
x1(t) → x∗1 > y2 при t → +∞,
(29)
где x∗1 = Δ - (mg + kΔ)/(k + αE2/l); в (29) сходимость доказана в работе [1], а неравенство -
это второе неравенство в условии 4) теоремы 2.
Рассмотрим уравнение
x1(t) = y2, t ≥ ΘA2 - t0.
(30)
Так как вектор-функция (x1(t), x2(t))т на промежутке [ΘA2 -t0, Θ1-t0] является решением
системы (27), собственные значения λ1 и λ2 матрицы коэффициентов которой отрицательны
и различны, то справедливо представление
x1(t) = C1eλ1t + C2eλ2t + x∗1,
где C1 и C2 - некоторые постоянные. При этом, поскольку
x1(ΘA2 - t0) < y2 < x∗1,
постоянные C1 и C2 не равны одновременно нулю.
Поэтому уравнение (30) можно записать в виде
C1eλ1t + C2eλ2t = y2 - x∗1, где λ1 < 0, λ2 < 0, C21 + C22 > 0, t > ΘA2.
Заметим, что функция в левой части рассматриваемого уравнения может иметь не более одной
точки экстремума при t > 0, а значит, в силу свойства (29) уравнение (30) может иметь не
более одного корня. Следовательно, уравнение xΘ1(t + t0) = y2 может иметь не более одного
корня на промежутке t ∈ [ΘA2 - t0, Θ1 - t0]. Поэтому, так как в силу условия теоремы 2
функция xΘ1(t + t0) принимает значение y2 при t = Θ1 - t0, то xΘ1(t + t0) = y2 при t ∈
∈ [ΘA2 - t0, Θ1 - t0). Таким образом,
x1(t) = y2, t ∈ [ΘA2 - t0,Θ1 - t0), и
x1(Θ1 - t0) = y2.
(31)
Теперь предположим, что для t∗1 дополнительно выполнено условие
ΘM1 - Θ1 < t∗1 ≤ Θ2.
(32)
Тогда в силу того, что решение x(t) замкнутой системы (5) с начальными условиями (24)
является колебательным режимом, выполнено неравенство x1(t) > y1, t ∈ [Θ1 - t0, ΘM1 - t0].
Отсюда, учитывая соотношения (31) и (26), получаем тождество
x(t) ≡ xΘ(t + t0) при t ∈ [0, ΘM1 - t0].
(33)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1113
Рассмотрим теперь поведение функций x1(t) и x2(t) на промежутке [ΘM1 - t0, Θ - t0].
Аналогично приведённым выше рассуждениям заметим, что тождества x1(t) ≡ xΘ1(t + t0) и
x2(t) ≡ xΘ2(t+t0) на промежутке [ΘM1 -t0,Θ-t0] остаются верными вплоть до момента t∗ ∈
∈ [ΘM1 - t0, Θ - t0], для которого выполняется равенство x1(t∗) = xΘ1 (t∗ + t0) = y1. Покажем,
что xΘ1(t + t0) = y1 при t ∈ [ΘM1 - t0, Θ - t0). Так как ϕ(t + t0) ≡ E1 на промежутке
[ΘM1 - t0, Θ - t0], то функции xΘ1(t + t0) и xΘ2(t + t0) тождественно совпадают на нём с
соответствующими компонентами x1(t) и x2(t) решения x(t) линейной стационарной системы
x1(t) = x2(t),
)
(34)
(k
α
β
α
x2(t) = -
+
E1
x1(t) -
x2(t) - g +
ΔE1
m
lm
m
lm
с начальными условиями
x1(ΘM1 - t0) = xΘ1(ΘM1 ), x2(ΘM1 - t0) = xΘ2(ΘM1 ).
(35)
Согласно условию 2) теоремы 2 матрица коэффициентов системы (34) является устойчивой и
имеет простой спектр. Покажем, что для решения x(t) этой системы с начальными условиями
(35) выполняется соотношение x1(t) = y1 при t ∈ [ΘM1 - t0, Θ - t0).
Действительно, первая компонента x1(t) любого решения x(t) системы (34) обладает свой-
ством
x1(t) → x∗∗1 < y1 при t → ∞,
(36)
где x∗∗ = Δ - (mg + kΔ)/(k + αE1/l); в (36) сходимость доказана в работе [1], а неравенство -
первое неравенство в условии 4) теоремы 2.
Рассмотрим уравнение
x1(t) = y1, t ≥ ΘM1 - t0.
(37)
Так как вектор-функция (xΘ1(t), xΘ2(t))т на промежутке [ΘM1 - t0, Θ - t0] является реше-
нием системы (34), собственные значения λ′1 и λ′2 матрицы коэффициентов которой отрица-
тельны и различны, то справедливо представление
x1(t) = C1eλ1t + C2eλ2t + x∗∗1,
где C1 и C2 - некоторые постоянные. При этом, поскольку
x1(ΘM1 - t0) > y1 > x∗∗1,
C1 и C2 не равны одновременно нулю.
Поэтому уравнение (37) можно записать в виде
C1eλ1t + C2eλ2t = y1 - x∗∗1, где λ′1 < 0, λ′2 < 0, C21 + C22 > 0, t ≥ ΘM1 - t0.
Заметим, что функция в левой части рассматриваемого уравнения может иметь не более одной
точки экстремума при t > 0, а тогда в силу свойства (36) уравнение (37) может иметь не более
одного корня. Следовательно, уравнение xΘ1(t + t0) = y1 может иметь не более одного корня
на промежутке t ∈ [ΘM1 - t0, Θ - t0]. Поэтому, так как в силу условия теоремы 2 функция
xΘ1(t + t0) принимает значение y1 при t = Θ - t0, xΘ1(t + t0) = y1 при t ∈ [ΘM1 - t0,Θ - t0).
Таким образом,
x1(t) = y1, t ∈ [ΘM1 - t0,Θ - t0), и
x1(Θ - t0) = y1.
Отсюда и из тождества (33) вытекает, что
x(t) ≡ xΘ(t + t0) при t ∈ [0, Θ - t0].
(38)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
1114
ФУРСОВ и др.
Наложим ещё одно ограничение на константу t∗1, а именно, пусть
t∗1 > t0.
(39)
Тогда вследствие того, что решение x(t) замкнутой системы (5) с начальными условиями (24)
является колебательным режимом, выполнено неравенство
x1(t) < y2, t ∈ [Θ - t0,Θ].
(40)
Отсюда и из тождества (38) вытекает, что при t ∈ [0, Θ] моменты переключений реле обрат-
ной связи (3) и реле программного управления (9) совпадают. Но тогда на этом промежутке
справедливо тождество x(t) ≡ xΘ(t + t0), а в силу Θ-периодичности функции xΘ(t + t0) это
тождество верно при всех t ≥ 0.
Следовательно, колебательное решение
x(t) системы (5) с начальными условиями (24)
является периодическим режимом. Таким образом, доказана следующая теорема о существо-
вании периодического режима в замкнутой системе (5).
Теорема 3. Пусть выполняются условия теоремы 2 и имеют место неравенства (25),
(32) и (39). Тогда в замкнутой системе (5) существует периодический режим с начальными
условиями (24).
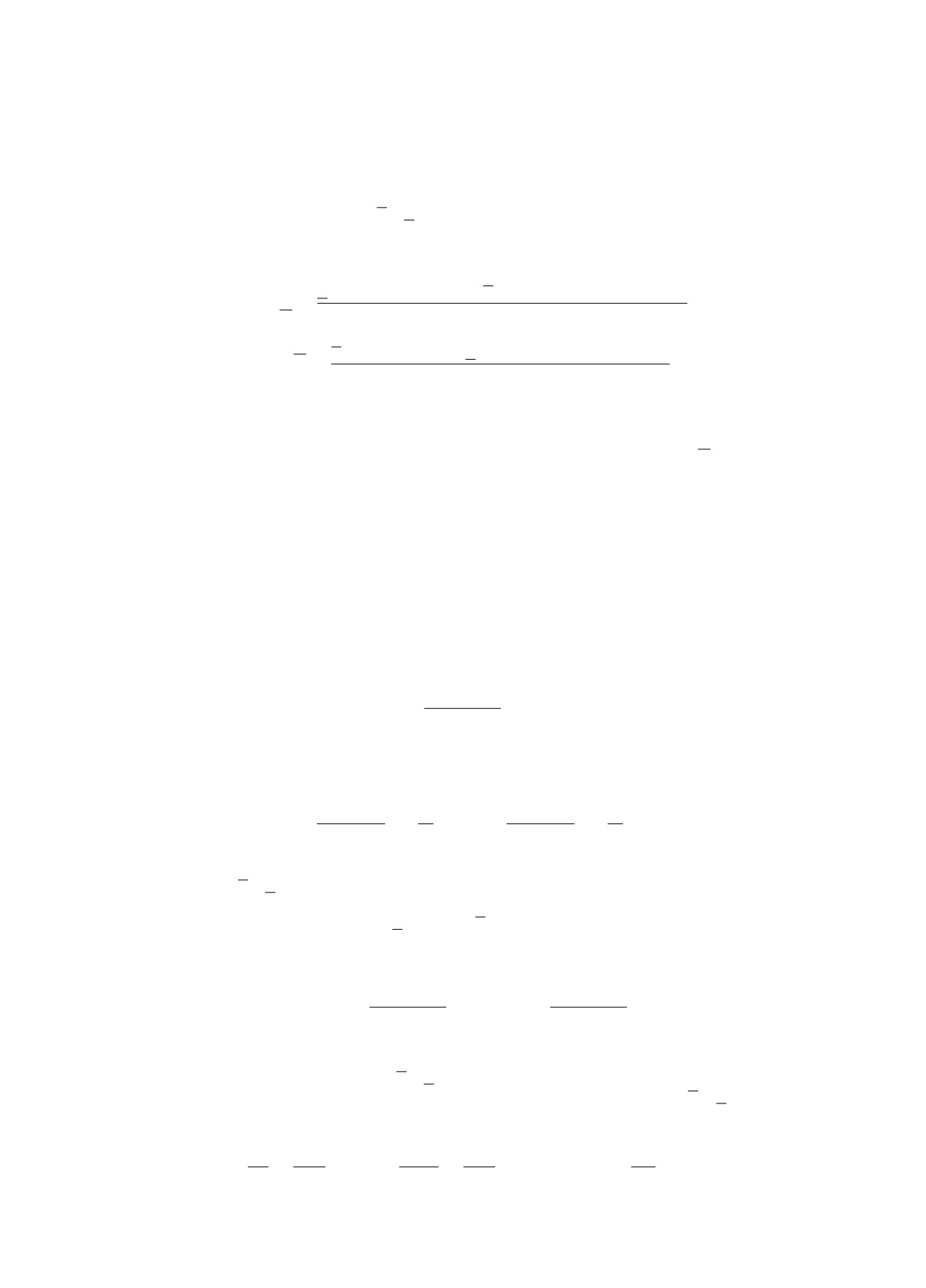
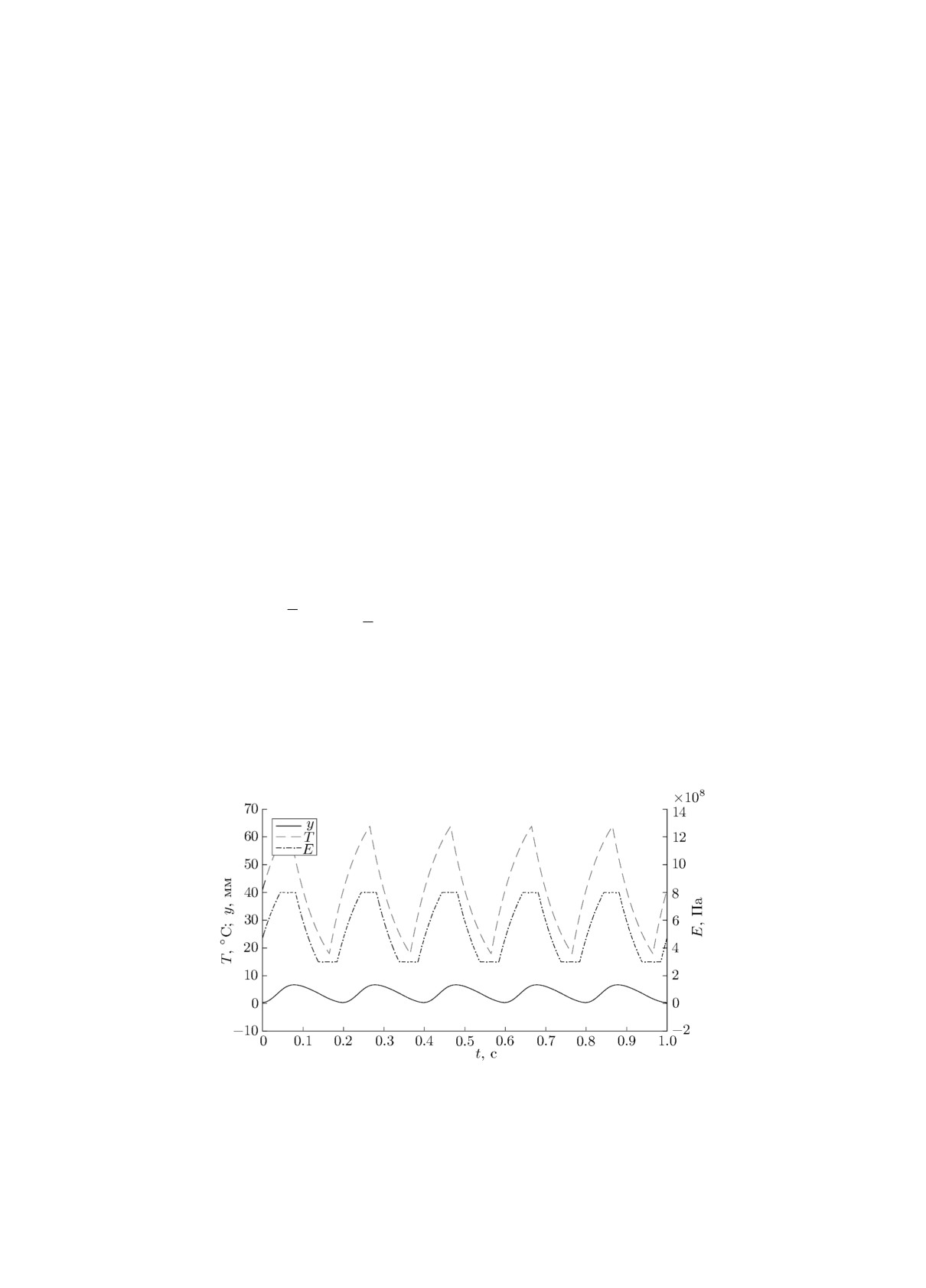
4. Результаты моделирования. Рассмотрим систему (1) со следующими параметрами:
m = 0.018, β = 0.7, k = 0.07, α = 1.32 · 10-8, l = 0.2, Δ = 0.009, γ = 1.76 · 109,
M1 = 24.3, M2 = 52.7, A1 = 32.8, A2 = 57.5, E1 = 3 · 108, E2 = 8 · 108.
Используя результаты настоящей статьи, удаётся рассчитать параметры
u = 80, u = 1, y1 = 0.00172, y2 = 0.0063
обратной связи (3), при которых в соответствующей замкнутой системе при E(0) = 4.73 · 108
и начальных условиях
y(0) = 0.0032,
y(0) = 0, T (0) = 41.067
возникает периодическое движение (рис. 5) с периодом Θ = 0.2. При этом моменты переклю-
чения реле обратной связи t1 = Θ1 - t0, t2 = Θ - t0, где Θ1 = 0.1 и t0 = 0.036.
Рис. 5. Графики функций y(t), T (t), E(t), соответствующих перио-
дическому режиму системы (1).
Заключение. В работе рассмотрена математическая модель одной термомеханической
установки [1] в виде управляемой нелинейной динамической системы (1), коэффициенты ко-
торой - положительные числовые параметры. При этом основная задача состояла в выборе
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021
О СУЩЕСТВОВАНИИ ПЕРИОДИЧЕСКОГО РЕЖИМА
1115
алгоритма управления, обеспечивающего в замкнутой системе возникновение периодическо-
го движения. В качестве алгоритма управления предложено использовать обратную связь по
выходу с оператором обратной связи в форме двухпозиционного реле с гистерезисом. В ре-
зультате получены достаточные условия на коэффициенты и начальные значения переменных
состояния системы (1) и на параметры регулятора (3), обеспечивающие возникновение пери-
одического режима в соответствующей замкнутой системе.
Исследование выполнено при финансовой поддержке Российского фонда фундаменталь-
ных исследований и Национального научного фонда Болгарии (проект 19-57-18006), Россий-
ского фонда фундаментальных исследований (проекты 20-57-0001, 20-07-00827, 19-07-00294),
Минобрнауки РФ в рамках реализации программы Московского центра фундаментальной и
прикладной математики по соглашению № 075-15-2019-1621.
СПИСОК ЛИТЕРАТУРЫ
1. Фурсов А.С., Тодоров Т.С., Крылов П.А., Митрев Р.П. О существовании колебательных режимов в
одной нелинейной системе с гистерезисами // Дифференц. уравнения. 2020. Т. 56. № 8. С. 1103-1121.
2. Todorov T., Nikolov N., Todorov G., Ralev Y. Modelling and investigation of a hybrid thermal energy
harvester // MATEC Web of Conferences. 2018. V. 148. P. 12002.
3. Pai A. A phenomenological model of shape memory alloys including time-varying stress: master’s thesis
of applied science. Waterloo, Ontario, Canada, 2007.
4. Обморшев А.Н. Введение в теорию колебаний. М., 1965.
5. Демидович Б.П. Лекции по математической теории устойчивости. М., 1967.
Электротехнический университет,
Поступила в редакцию 01.03.2021 г.
г. Ханчжоу, Китай,
После доработки 19.05.2021 г.
Московский государственный университет
Принята к публикации 08.06.2021 г.
им. М.В. Ломоносова,
Институт проблем передачи информации
им. А.А. Харкевича, г. Москва,
Технический университет, г. София, Болгария
8
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 57
№8
2021