ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2022, том 58, № 11, с. 1537-1547
ТЕОРИЯ УПРАВЛЕНИЯ
УДК 517.977
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО
СТАБИЛИЗАТОРА ДЛЯ НЕЛИНЕЙНОЙ СИСТЕМЫ
© 2022 г. П. А. Точилин
Рассмотрена задача стабилизации системы нелинейных по фазовым переменным обык-
новенных дифференциальных уравнений с управляющими параметрами. На допустимые
значения позиционного управления наложены жёсткие поточечные ограничения. В предпо-
ложении достаточной гладкости функций из правой части дифференциальных уравнений
построена кусочно-аффинная система, аппроксимирующая исходную нелинейную систему
на прямоугольной сетке в заданной области фазового пространства. Стабилизатор может
быть найден также в кусочно-аффинной форме, ему соответствует непрерывная, но не
везде дифференцируемая функция Ляпунова схожей структуры. Сформулирована и дока-
зана основная теорема о достаточных условиях стабилизируемости системы при помощи
кусочно-аффинного управления. Предложен алгоритм построения такого управления, а
также функции Ляпунова в некоторой малой окрестности нулевого положения равновесия.
Рассмотрен пример численного решения задачи стабилизации для конкретной модельной
системы в трёхмерном пространстве.
DOI: 10.31857/S0374064122110097, EDN: MBOXCW
Введение. Работа посвящена приближённому решению задачи стабилизации для управля-
емой системы [1, с. 476-478], заданной при помощи нелинейных дифференциальных уравнений
с гладкой правой частью. Необходимо построить позиционное управление - стабилизатор, для
которого заведомо выполнены жёсткие поточечные ограничения и который делает нулевое
положение равновесия замкнутой им системы локально асимптотически устойчивым. Необхо-
димо также оценить область притяжения положения равновесия для замкнутой системы.
Указанную задачу можно решать с помощью кусочной линеаризации исходных нелиней-
ных уравнений на заданной сетке из многогранников в фазовом пространстве. На этой сетке
необходимо построить кусочно-аффинную функцию Ляпунова, а также соответствующее ей
кусочно-аффинное позиционное управление.
Кусочно-аффинные функции Ляпунова успешно используются для изучения устойчивости
нелинейных (в частности, кусочно-аффинных) систем. Так, в работе [2] показано, что для сис-
темы дифференциальных уравнений с гладкой правой частью и экспоненциально устойчивым
нулевым положением равновесия всегда можно построить локальную непрерывную кусочно-
линейную функцию Ляпунова. Данная функция может быть далее достроена до непрерывной
кусочно-аффинной функции Ляпунова, позволяющей оценить область притяжения нулевого
положения равновесия.
В работе [3] предложен алгоритм построения непрерывной кусочно-аффинной функции
Ляпунова для задачи синтеза управлений в нелинейной системе дифференциальных уравне-
ний. Задача стабилизации сведена к проблеме исследования слабой асимптотической устойчи-
вости для вспомогательного дифференциального включения. Функцию цены, определённую
на совокупности симплексов в фазовом пространстве, предлагается определять за счёт реше-
ния вспомогательной задачи линейного программирования. При этом используется кусочно-
постоянное позиционное управление, относительно которого априори неизвестно, будет ли оно
допустимым, т.е. порождающим траектории рассматриваемой системы. В упомянутой работе
этот вопрос остался неисследованным.
Статья [4] посвящена построению непрерывной кусочно-аффинной функции Ляпунова, а
также кусочно-аффинного позиционного управления для задачи стабилизации системы с пе-
реключениями - гибридной системы [5]. Условия переключений между несколькими разными
дифференциальными уравнениями (режимами функционирования) являются частью управ-
ления совокупной гибридной системой. Предложен алгоритм построения указанных функций
7
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1538
ТОЧИЛИН
с разными областями притяжения положения равновесия замкнутой системы, получена оценка
этой области. Обоснована допустимость построенного кусочно-аффинного управления.
В работе [6] рассмотрена задача оптимального управления нелинейной системой с инте-
гральным функционалом на бесконечном отрезке времени. Для решения задачи использована
функция цены, построенная на совокупности симплексов в фазовом пространстве, а искомое
субоптимальное позиционное управление найдено в кусочно-аффинной форме. В отличие от
предыдущих результатов здесь также предложен более общий подход к построению разрывной
кусочно-аффинной функции цены. Этот метод может быть также применён и при решении
задачи стабилизации для нелинейной системы.
В настоящей статье предложен альтернативный к упомянутым выше подход к парамет-
ризации кусочно-аффинных функций Ляпунова в задаче стабилизации нелинейной системы:
вместо сетки из симплексов в фазовом пространстве используется совокупность прямоуголь-
ных параллелепипедов. Теперь функции цены и управления нельзя однозначно определить
своими (независимыми) значениями в вершинах. В результате получаются другие формулы
для расчёта указанных функций, более простые с точки зрения расчётов, поскольку не нуж-
но вычислять матрицы перехода от глобальных декартовых координат к барицентрическим
координатам в рамках каждого конкретного симплекса. При этом, однако, повышается размер-
ность во вспомогательных задачах оптимизации, которые необходимо решать при построении
функции цены. Для вычисления этой функции, а также позиционного управления, предло-
жен алгоритм, основой которого является решение цепочки вспомогательных задач линейно-
го программирования. Вычисления по такому алгоритму могут быть проведены достаточно
эффективно, в том числе и для систем большой размерности. Работа этого алгоритма проде-
монстрирована на конкретном модельном примере.
1. Задача стабилизации для нелинейной системы. Рассмотрим систему обыкновен-
ных дифференциальных уравнений с управляющими параметрами
x = f(x) + g(x)u, x ∈ Rn, t ∈ [0,+∞).
(1)
Здесь гладкие функции f(x) ∈ C2(Ω), f(x) ∈ Rn, f(0) = 0, g(x) ∈ C1(Ω), g(x) ∈ Rn×m опре-
делены при x ∈ Ω = [a1, b1]×. . .×[an, bn]. Точка x = 0 является внутренней для множества Ω,
т.е. ai < 0 < bi для любых i = 1, n.
На допустимые значения позиционного управления u = u(x) ∈ Rm наложены жёсткие
поточечные ограничения: u ∈ P ⊂ Rm, где множество P является выпуклым компактом.
Допустимым управлением назовём такую функцию u = u(x), которая удовлетворяет ука-
занному выше поточечному ограничению, а также порождает траектории системы (1), т.е. для
любого начального условия x(0) = x0 ∈ Ω задача Коши для дифференциального уравнения
x = f(x)+g(x)u(x) должна иметь единственное решение x(t) = x(t,t0,x0), определённое при
t ≥ 0, по крайней мере до момента выхода траектории на границу Ω. Эти условия, в част-
ности, будут выполнены, если функция u(x) удовлетворяет условию Липшица при x ∈ Ω.
Также предположим, что для допустимого управления u(x) должно быть выполнено усло-
вие u(0) = 0. Будем далее рассматривать траектории замкнутой системы лишь до момента
возможного выхода на границу Ω, не накладывая в связи с этим никаких дополнительных
априорных ограничений на допустимые управления.
Решаемая в данной работе задача стабилизации состоит в поиске таких множества X ⊂ Ω
и допустимого управления u(x), определённого при x ∈ X , что система дифференциальных
уравнений x = f(x)+g(x)u(x) будет обладать асимптотически устойчивым нулевым положе-
нием равновесия с областью притяжения X , т.е. для любых x0 ∈ X и t ≥ 0 должно быть
выполнено условие существования предела
lim
∥x(t, 0, x0)|u(·)∥ = 0, x(t, 0, x0)|u(·) ∈ X ,
t→+∞
где x(t, 0, x0)|u(·), t ∈ [0, +∞), - траектория системы x = f(x)+g(x)u(x), выпущенная из на-
чальной позиции x(0) = x0. Заметим, что данное определение асимптотической устойчивости
является более сильным, чем традиционное, так как здесь сочетаются требования инвари-
антности множества X и принадлежности ему начальной позиции, т.е. не рассматриваются
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО СТАБИЛИЗАТОРА
1539
траектории, которые стартуют вне X и попадают в это множество в какой-то промежуточный
момент времени. Даное ограничение связано с особенностями основного алгоритма, который
будет приведён далее. Кроме того, это сильное требование позволяет не следить за возможным
выходом траектории замкнутой системы за границу Ω в какие-то промежуточные моменты
времени, так как X ⊂ Ω.
Для решения задачи стабилизации далее воспользуемся традиционным подходом, пред-
полагающим поиск наряду с управлением u(x) также соответствующей функции Ляпуно-
ва V (x). Последняя может быть использована для доказательства асимптотической устойчи-
вости нулевого положения равновесия замкнутой системы.
2. Кусочная линеаризация дифференциальных уравнений. Каждый из отрезков
[ai, bi] разобьём на Ni ∈ N частей:
⋃
xi ∈ [ai,bi] =
[x(j)i, x(j+1)i], x(0)i = ai, x(Ni)i = bi.
j=0
Будем считать, что для каждого i = 1, n найдётся номер j∗i ∈ {1, . . . , Ni - 1} такой, что
x(ji)i = 0, т.е. начало координат является одной из точек разбиения.
Для каждой пары индексов i, j введём обозначения
(j)
+x(j+1)i
z(j)i =xi
,
δ(j)i =xij+1) -xij)
2
2
Для нумерации вершин и многогранных частей полученного разбиения области Ω будем далее
использовать мультииндексы
j=(j1,... ,jn) ∈ {0,... ,N1} × ... × {0,... ,Nn}.
Множество всех таких индексов
j обозначим через J . Кроме того, через J0 обозначим
совокупность всех мультииндексовj ∈ J , для которых ji < Ni при любом i = 1, n. Мульти-
индекс, соответствующий нулевому положению равновесия, обозначим черезj∗. Пусть z(j) ∈
∈ Rn - вектор с компонентами z(ji)i, i = 1,n. Аналогично δ(j) ∈ Rn - вектор с компонента-
ми δ(ji)i. Введём также обозначение для части области Ω:
Ω(j) = [x(j1)1,x(j1+1)1] × ... × [x(jn)n,x(jn+1)n] для любого
j=(j1,... ,jn) ∈ J0.
Точка x(j) = (x(j1)1, . . . , xnjn)) является вершиной многогранника Ω(j), обладающей наимень-
шими координатами.
Рассмотрим теперь линеаризованную систему (1):
xi = fi(z(j)) + (f′i(z(j)))т(x - z(j)) + gi(z(j))u + ν(j)i(x), если xi ∈ [x(ji)i,x(ji+1)i], i = 1,n.
Здесь f′i(·) - градиент функции fi(·), gi(·) - i-я строка матрицы g(·). Погрешность линеа-
ризации ν(j)i(x), далее интерпретируемую как неопределённость, можно оценить следующим
образом:
ν(j)i(x) ∈ [R(j)i,-,R(j)i,+],
(2)
∑
R(j)i,- =1∥δ(j)∥2
min
λmin(f′′i(ξ)) - ∥δ(j)∥
max
∥g′ik(η)∥ρ(ek|P),
2
ξ∈Ω(j)
η∈Ω(j)
k=1
∑
R(j)i,+ =1∥δ(j)∥2 max
λmax(f′′i(ξ)) + ∥δ(j)∥
max
∥g′ik(η)∥ρ(ek|P).
2
ξ∈Ω(j)
η∈Ω(j)
k=1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
7∗
1540
ТОЧИЛИН
Здесь f′′i(·) - матрица из вторых производных функции fi(·), λmin(Q), λmax(Q) - соот-
ветственно наименьшее и наибольшее собственные значения некоторой симметричной мат-
рицы Q, ρ(l|P) - значение опорной функции ко множеству P в направлении l ∈ Rm, а ek -
k-й орт в пространстве Rm.
3. Кусочно-аффинные функции V (x) и u(x). Для решения задачи стабилизации
далее используем непрерывную кусочно-аффинную функцию Ляпунова, которая может быть
задана следующей формулой:
∑
V (x) = (α(ji)(xi)v(ji)i + (1 - α(ji)(xi))v(ji+1)i), если xi ∈ [x(ji)i, x(ji+1)i], i = 1, n.
(3)
i=1
Здесь
(ji+1)
x
-xi
i
α(ji)(xi) =
,
i = 1,n, ji = 0,Ni - 1,
x(ji+1)i - x(ji)
i
а параметры v(j)i ∈ R, i = 1, n, j = 0, Ni, будут найдены далее. Эти величины однознач-
но задают непрерывную кусочно-аффинную функцию V (x) на совокупности областей Ω(j),
j∈J0. Данная функция является дифференцируемой по любому направлению в любой точ-
ке x ∈ int Ω. На границах множеств Ω(j) эта функция может быть недифференцируема в
обычном смысле.
На величины v(j)i наложим следующие ограничения:
v(ji)i = 0 для любого i = 1,n, т.е. V (x(j∗)) = V (0) = 0,
(4)
∑
j∈Jтакого,что
j= j∗.
V (x(j)) =
v(ji)i > 0 для любого индекса
(5)
i=1
Заметим, что так как функция V (x) является аффинной в каждой из областей Ω(j), то при
выполнении условий (4), (5) V (x) > 0 при любом x = 0.
Далее будем использовать непрерывное кусочно-аффинное позиционное управление вида
∑
u(x) = (α(ji)(xi)u(ji)i + (1 - α(ji)(xi))u(ji+1)i), если xi ∈ [x(ji)i, x(ji+1)i], i = 1, n,
(6)
i=1
где векторы u(ji)i ∈ Rm, i = 1, n, j = 0, Ni, необходимо определить. Кроме того, положим
u(ji)i = 0 при всех i = 1,n. Пусть для любой вершины x(j) рассматриваемых многогранников
∑
u(x(j)) =
u(ji)i ∈ P.
(7)
i=1
Поскольку каждая компонента вектор-функции u(x) является аффинной в каждой облас-
ти Ω(j), то из условия (7) вытекает, что u(x) ∈ P, x ∈ Ω.
При любых фиксированных значениях u(ji)i кусочно-аффинная функция u(x) удовлетво-
ряет условию Липшица в области Ω, а потому данное управление является допустимым.
Пусть x ∈ int Ω(j) для некоторого индекса j. Рассмотрим производную функции Ляпунова
вдоль траектории линеаризованной системы, замкнутой кусочно-аффинным управлением u(x)
при x ∈ Ω(j) :
∑
v(ji+1)i - v(ji)i
V (x) =
(fi(z(j)) + (f′i(z(j)))т(x - z(j)) + gi(z(j))u(x) + ν(j)i(x)).
(8)
(ji+1)
x
-x(ji)
i=1
i
i
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО СТАБИЛИЗАТОРА
1541
Используя (8) и (2), запишем теперь достаточное условие определённой отрицательности пол-
ной производной функции цены в какой-либо вершине h многогранника Ω(j) :
[
∑v(ji+1)i - v(ji)i
R(j)i,- + R(j)i,+
R(j)i,+ - R(j)i,- ]
fi(z(j)) +
+ sgn (v(ji+1)i - v(ji)i)
+
(ji+1)
2
2
x
-x(ji)
i=1
i
i
∑
v(ji+1)i - v(ji)i
+
((f′i(z(j)))т(h - z(j)) + gi(z(j))u(h)) ≤ -ε min{∥h∥, 1}.
(9)
(ji+1)
x
-x(ji)
i=1
i
i
Здесь ε > 0 - малое фиксированное число.
Далее для некоторого множества X через ∂X обозначим множество его граничных точек,
а через int X - множество всех внутренних точек.
Приведённые выше предварительные построения позволяют теперь сформулировать ос-
новное утверждение, задающее достаточные условия для решения задачи стабилизации с ис-
пользованием кусочно-аффинных функций V (x) и u(x).
⋃
Теорема. Пусть J∗ ⊂ J0 - некоторое множество мультииндексовj, X0 =
j∈J∗ Ω(j).
Пусть найдены такие v(ji)i, u(ji)i (для различных i, ji), что для любых j ∈ J∗, i = 1, n,
выполнены условия (4), (5), (7), (9) (последнее условие выполнено для любой вершины h мно-
жества Ω(j)). Построим множество
X = {x ∈ X0 : V (x) ≤ Vmin},
(10)
Vmin = min{V (h) : h - вершина Ω(j), j ∈ J∗, h ∈ ∂X0}.
(11)
Предположим, что 0 ∈ int X . Тогда кусочно-аффинное управление u(x), определённое со-
гласно формуле (6), решает задачу стабилизации для системы (1), причём областью при-
тяжения нулевого положения равновесия замкнутой этим управлением системы является
множество int X.
Доказательство. Рассмотрим произвольную точку x ∈ Ω(j) ⋂ int X0,
j ∈ J∗, и оценим
производную функции Ляпунова V (x), построенной согласно формуле (3), вдоль траектории
системы (1), замкнутой при помощи управления (6). Предположим, что x иj выбраны таким
образом, что вектор f(x) + g(x)u(x) указывает либо внутрь Ω(j), либо вдоль границы этого
многогранника. Для любого x всегда можно подобрать подходящий индексj ∈ J∗.
Для оценки производной функции Ляпунова используем условие (9), а также оценку для
погрешности линеаризации (2):
(
∑
v(ji+1)i - v(ji)i
V (x) ≤
fi(z(j)) + (f′i(z(j)))т(x - z(j)) +
(ji+1)
x
-x(ji)
i=1
i
i
)
∑
+ gi(z(j))
(α(ji)(xi)u(ji)i + (1 - α(ji)(xi))u(ji+1)i)
+
i=1
{
}
∑
+
max R(j) viji+1) -viji)i,-
,R(j) viji+1) -viji)i,+
x(ji+1)i - x(ji)i
x(ji+1)i - x(ji)
i=1
i
Полученная функция является линейной относительно переменной x. Эта функция достигает
своего максимума хотя бы в одной вершине многогранника Ω(j). Кроме того, выражение в
третьей строке можно записать через функцию sgn аналогично (9). В итоге получим, что
[
(ji+1)
∑vi
−v(ji)i
R(j)i,- + R(j)i,+
R(j)i,+ - R(j)i,- ]
V (x) ≤ max
fi(z(j)) +
+ sgn (v(ji+1)i - v(ji)i)
+
h
2
2
x(ji+1)i - x(ji)
i=1
i
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1542
ТОЧИЛИН
}
∑
v(ji+1)i - v(ji)i
+
((f′i(z(j)))т(h - z(j)) + gi(z(j))u(h)) : h - вершина Ω(j)
≤
(ji+1)
x
-x(ji)
i=1
i
i
≤ -εmin(min{∥h∥,1}) ≤ 0.
h
Заметим, что полученное выражение может быть равно нулю только в том случае, если h = 0
является одной из вершин Ω(j). При этом в других вершинах этого многогранника анализи-
руемая линейная функция принимает значения, отличные от нуля. Следовательно, равенство
нулю этой линейной функции возможно только при x = 0, т.е. доказано, что
V (x) < 0 для любого x ∈ int X0, x = 0.
Более того, можно показать, что для любого η > 0 существует число δ > 0 такое, что
V (x) ≤ -δ при всех x ∈ int X0, ∥x∥ ≥ η.
Из доказанного свойства монотонности функции V (x) вдоль траекторий системы, а также
из определения множества X следует, что если траектория замкнутой системы стартует из
int X , то она не может достичь границы ∂X , а значит, никогда не выйдет за пределы этого
множества.
Заметим также, что из условий (4) и (5) следует, что V (x) является определённо поло-
жительной функцией в X0. Далее, следуя схеме доказательства классической теоремы Ля-
пунова об асимптотической устойчивости [7, с. 25; 8, с. 81-82], можно показать, что нулевое
положение равновесия замкнутой системы является асимптотически устойчивым с областью
притяжения int X .
4. Алгоритм построения кусочно-аффинных функций V (x) и u(x). Рассмот-
рим теперь конкретный алгоритм построения кусочно-аффинной функции Ляпунова V (x), а
также управления u(x), удовлетворяющих условиям теоремы. Попутно будет построена, по
возможности максимальная по включению, область притяжения X нулевого положения рав-
новесия. Множество X , вообще говоря, зависит от Ω, но в данной работе эта зависимость
подробно не исследуется.
Основная идея алгоритм схожа с предложенной в работе [4], но с учётом другой структу-
ры используемых кусочно-аффинных функций. В этом алгоритме проводятся многократные
попытки добавлять совокупности соседних множеств Ω(j) к ранее обработанным, подсчиты-
вая значения v(ji)i, u(ji)i в соответствующих вершинах. При этом на каждом шаге алгоритма
следует проверять выполнение условий основной теоремы. Если на очередном шаге не удастся
добавить (обработать) какие-либо новые множества Ω(j), то алгоритм завершит работу.
Для упрощения расчётов будем далее считать, что множество допустимых значений управ-
лений P является выпуклым многогранником в Rm и может быть задано при помощи сово-
купности линейных неравенств∗) :
P = {u ∈ Rm : Du ≼ γ}, D ∈ Rl×m, γ ∈ Rl.
Каждой вершине x(k) множеств Ω(j) сопоставим вспомогательную величину σ(k), прини-
мающую значения, равные нулю и единице, и показывающую, были ли уже в этой вершине
подсчитаны значения v(k)i, u(k)i. Кроме того, каждому множеству Ω(j) сопоставим вспомо-
гательную величину η(j), которая может принимать три значения: η(j) = 0, если данное
множество ещё не было обработано алгоритмом; η(j) = 1, если множество уже было успешно
обработано алгоритмом и было добавлено ко множеству X0; η(j) = -1, если множество уже
было обработано алгоритмом, но за его счёт не удалось расширить область притяжения.
Будем говорить, что два разных множества Ω(j) и Ω(k) являются соседними, если они
пересекаются по общей грани максимальной возможной размерности (т.е. имеют ровно n об-
щих вершин). Множества Ω(j), . . . , Ω(s) назовём соседними, если их можно упорядочить так,
∗) Символ “ ≼ ” соответствует покомпонентному неравенству для векторов одинаковой длины.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО СТАБИЛИЗАТОРА
1543
что в полученной цепочке каждое следующее множество является соседним по отношению к
какому-либо предыдущему.
Зафиксируем также вспомогательный параметр - натуральное число S.
Шаг 1. Изначально положим v(j∗)i = 0, u(j∗)i = 0 для любого i = 1, n. Также пусть σ(j∗) =
= 1. Для всех других вершин σ(j) = 0. Также пусть J∗ = ∅, X0 = ∅, Vmin = 0. Для каждого
j пусть η(j) = 0.
Шаг 2. Возьмём некоторую совокупность соседних множеств Ω(j),
j ∈
ˆ
J
⊂ J0, для ко-
торых либо x(j∗) = 0 является одной из их вершин, либо хотя бы одно из этих множеств
является соседним со множеством Ω(k), для которого η(k) = 1. Кроме того, для каждого из
таких множеств должно быть выполнено условие η(j) = 0. Если удовлетворяющих этим усло-
виям множеств не существует, то алгоритм переходит к завершающему шагу 12. В противном
случае начинается описанная ниже обработка найденных многогранников.
Шаг 3. Выполняется последовательный перебор разных вариантов значений функций sgn
ˆ
в формулах (9) для всех возможных
j ∈
J
только для ещё не найденных величин v(ji)i
или v(ji+1)i. Каждый такой вариант соответствует некоторой системе неравенств для искомых
величин v(k)i, а выражения в квадратных скобках в (9) можно далее считать постоянными.
Следующие четыре шага алгоритма выполняются отдельно для каждого такого варианта.
Шаг 4. Для каждогоj
J используем далее вспомогательный вектор d(j) ∈ Rn. Изна-
чально пусть
∑
d(j) =
sgn (v(ji+1)i - v(ji)i)gi(z(j)).
i=1
Здесь учитывается, что значения функций sgn ранее были зафиксированы.
Если вектор d(j) не нулевой, то дополнительно нормируем его: d(j) = d(j)/∥d(j)∥.
Положим s = 1 (вспомогательный индекс).
⋃
Шаг 5. Поиск управлений. Определим значения u(k)i, i = 1, n, x(k) ∈
ˆ
Ω(j), σ(k) = 0,
j∈J
решив вспомогательную задачу линейного программирования:
}
∑
j∈ Jˆ
d(j)
u(k)i : x(k) ∈ Ω(j), σ(k) = 0,
→ min
j
k
i=1
при линейных ограничениях
)
∑
⋃
D u(k)
≼ γ для любого
k такого, что x(k) ∈
Ω(j), σ(k) = 0.
i
i=1
j∈J
ˆ
Шаг 6. Поиск значений функции Ляпунова. Определим значения v(k)i, i = 1, n, x(k) ∈
⋃
∈
ˆ
Ω(j), σ(k) = 0, решив вспомогательную задачу линейного программирования. Задача
j∈J
оптимизации при этом имеет вид
}
∑∑{
⋃
v(k)i : x(k) ∈
Ω(j), σ(k) = 0
→ min .
(12)
i=1
k
j∈Jˆ
Линейные ограничения на искомые параметры v(k)i определяются следующим образом:
(a) Условия положительности значений функции Ляпунова и одновременно расширения
потенциальной области притяжения X0 :
∑
⋃
v(k)i ≥ max{εmin{∥x(k)∥,1},Vmin} для любого x(k) ∈
Ω(j) такого, что σ(k) = 0.
i=1
j∈
ˆJ
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1544
ТОЧИЛИН
(b) Ограничения на v(k)i для вычисления sgn в (9) (см. шаг 3 алгоритма).
(c) Условия отрицательности производной функции Ляпунова вдоль траектории замкну-
той системы (9) для каждогоj
J и каждой соответствующей вершины h (в том числе для
вершин, уже обработанных на предыдущих итерациях). При этом в формулах (9) использу-
ются управляющие параметры u(k)i, найденные на предыдущем шаге 5, на данной итерации
работы алгоритма.
Шаг 7. Если удалось решить задачи линейного программирования и найти значения u(k)i
и v(k)i, то проверяется выполнение следующего условия:
- либо s = 1 (т.е. это первая итерация работы);
- либо s > 1, и значение функционала (12), найденное на этой итерации, меньше анало-
гичного значения, найденного на предыдущей итерации, с номером s - 1.
Если указанное условие выполнено и s < S, то производятся следующие действия:
- значение s увеличивается на единицу;
- для каждогоj
J заново рассчитывается вектор
∑
v(ji+1)i - v(ji)i
d(j) =
gi(z(j)),
(ji+1)
xi
−x(ji)
i=1
i
если вектор d(j) не нулевой, то дополнительно нормируем его: d(j) = d(j)/∥d(j)∥;
- алгоритм снова переходит к шагу 5.
В противном случае алгоритм переходит либо к обработке следующего варианта значе-
ний функций sgn в соответствующих формулах (9), либо к шагу 8, завершающему такую
обработку.
Шаг 8. Задачи линейного программирования из шага 7 должны быть решены для разных
вариантов значений функций sgn в соответствующих формулах (9). Среди задач, которые
имеют решения, выделим ту, в которой значение функции (12) получилось наименьшим.
Шаг 9. Если в предыдущих шагах удалось найти решение задачи линейного программиро-
вания для оптимального варианта значений функций sgn в формулах (9), то ко множеству X0
j∈ Jˆ,акомножествуJ ∗-соответствующиеиндексы
ˆ
добавляются многогранники Ω(j),
J
Для каждого обработанного на данном шаге множества Ω(j) положим η(j) = 1. Для каждой
вершины x(k) указанных множеств положим σ(k) = 1. Запоминаются значения v(k)i, u(k)i, по-
лученные в результате решения задачи линейного программирования. Кроме того, необходимо
заново пересчитать величину Vmin по формуле (11).
Шаг 10. Если же выше не удалось найти решения задач линейного программирования, то
для каждого рассмотренного на данном шаге множества Ω(j) положим η(j) = -1.
Шаг 11. Алгоритм переходит снова к шагу 2, т.е. к следующей попытке добавить какие-то
множества Ω(j) к конструируемому множеству X0.
Шаг 12. Завершение работы. На выходе имеем множества X0 и J∗, задающие область
притяжения нулевого положения равновесия, а также величины v(j)i, u(j)i, i = 1, n,
j∈J ∗.
Теперь можно определить множество X согласно (10), а также построить кусочно-аффинные
функции Ляпунова и позиционного управления (стабилизатора) по формулам (3), (6).
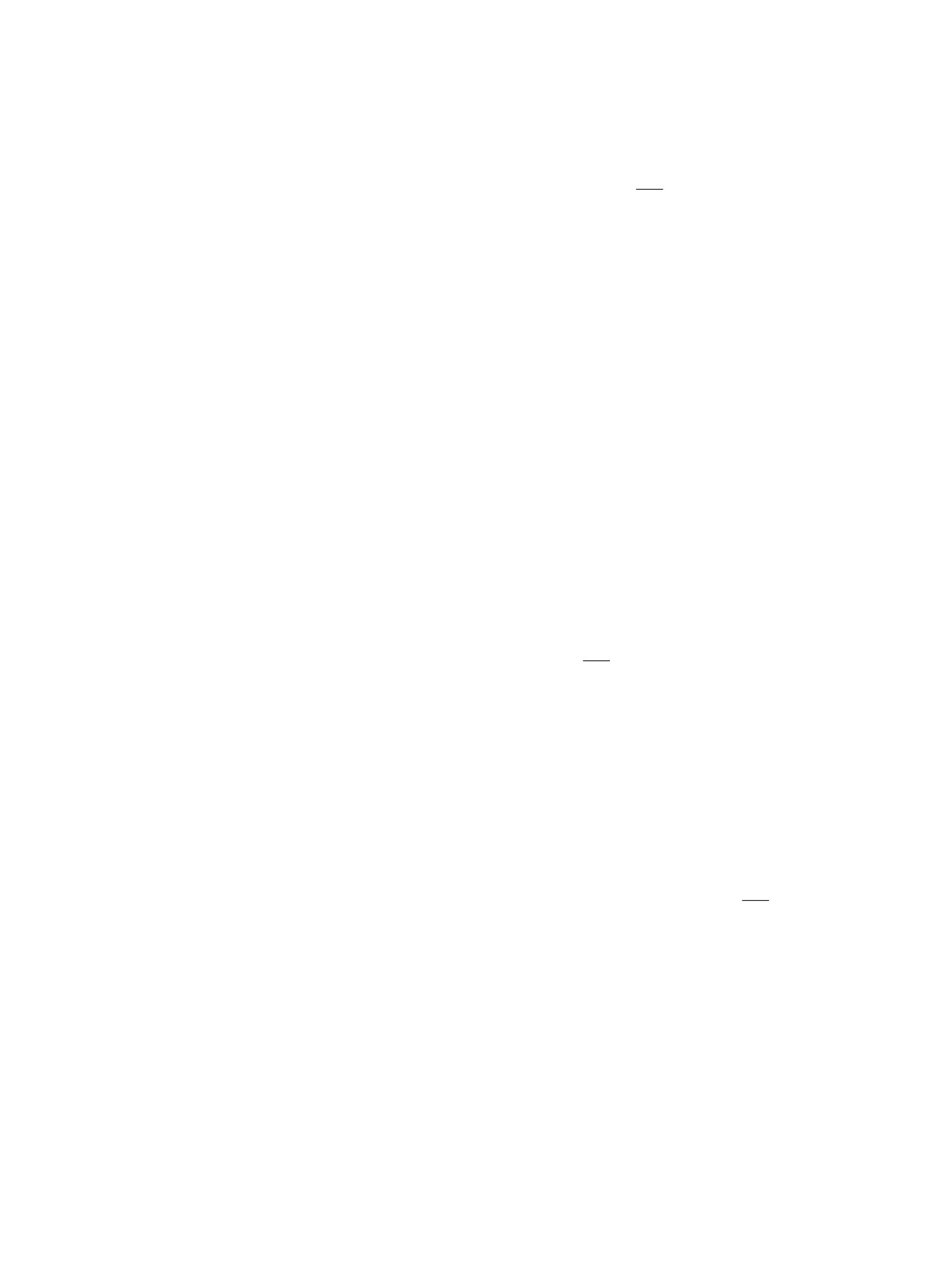
Для одной и той же системы (1) приведённый алгоритм может построить разные множества
X0 и определённые на них кусочно-аффинные функции V (x) и u(x). Это связано с тем, что в
шаге 2 можно выбирать очередные обрабатываемые области Ω(j) разными способами. Одна
из возможностей - обрабатывать эти множества по одному за шаг работы алгоритма (рис. 1, a)
аналогично тому, как было описано в работе [4] для случая системы с переключениями и сетки
из симплексов. Такой подход минимизирует сложность вычислений на каждом отдельном шаге
работы алгоритма, однако количество таких шагов может быть большим. Возможны и другие
подходы, когда за один шаг работы алгоритма обрабатывается сразу совокупность множеств
Ω(j), например, как показано на рис. 1, б.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО СТАБИЛИЗАТОРА
1545
(а)
(б)
Рис. 1. Множества X , полученные при разных правилах выбо-
ра очередных обрабатываемых многогранников Ω(j). Числами обо-
значены номера итераций алгоритма, на которых Ω(j) добавлены
в X.
Заметим, что поскольку на каждом шаге работы алгоритма отслеживается выполнение
условий теоремы, то если 0 ∈ int X , можно утверждать, что множество X является множе-
ством притяжения для нулевого положения равновесия системы (1) при использовании по-
строенного кусочно-аффинного стабилизатора вида (6).
Решаемые на каждом шаге работы алгоритма подзадачи линейного программирования мо-
гут быть решены эффективно (см. [9, с. 297-303]) за полиномиальное время в зависимости как
от количества переменных (v(k)i, u(k)i), так и от количества линейных неравенств (ограниче-
ний). Это позволяет применять алгоритм для решения задач стабилизации сложных систем с
большой размерностью вектора фазовых переменных.
5. Пример. В качестве примера рассмотрим задачу стабилизации угловых скоростей квад-
рокоптера, зависшего в заданной точке пространства. Для этого используем математическую
модель, подробно описанную в статье [10]. Дифференциальные уравнения для трёх компонент
угловой скорости выглядят следующим образом:
d
Ixxw˙ϕ =
√
F2 - wψwθ(Izz - Iyy), Izzw˙ψ = dF4 - wϕwθ(Iyy - Ixx),
2
d
Iyyw˙θ =
√
F3 - wϕwψ(Ixx - Izz),
(13)
2
где F1 = p1 + p2 + p3 + p4, F2 = -p1 + p2 + p3 - p4, F3 = -p1 - p2 + p3 + p4, F4 = -p1 + p2 - p3 +
+p4, pi, i = 1,4, - тяги, создаваемые отдельными двигателями. На каждый из управляющих
параметров pi задано поточечное ограничение: pi ∈ [0, pmax]. Величина F1 соответствует
подъемной силе для центра масс аппарата и считается фиксированной: F1 = p1 + p2 + p3 +
+p4 = mg. Другие величины F2, F3, F4 могут изменяться, позволяя квадрокоптеру изменять
ориентацию в пространстве.
Введём обозначения x = (wϕ, wψ, wθ)т для вектора фазовых переменных и запишем сис-
тему (13) в виде
x = f(x) + Bu, u ∈ P,
где
⎛
⎞
d
√
0
0
⎛
⎞
⎜
2Ixx
⎟
c1x2x3
⎜
⎟
⎜
d
⎟
f (x) =⎝c2x1x3⎠,B=
⎜
0
0
⎟,
⎜
Izz
⎟
c3x1x2
⎝
d
⎠
0
0
√
2Iyy
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1546
ТОЧИЛИН
Iyy - Izz
Ixx - Iyy
Izz - Ixx
c1 =
,
c2 =
,
c3 =
Ixx
Izz
Iyy
Множество P - выпуклый многогранник в пространстве переменных u = (F2, F4, F3)т, кото-
рый задаётся следующими неравенствами:
0 ≤ mg - F2 - F3 - F4 ≤ 4pmax,
0 ≤ mg + F2 - F3 + F4 ≤ 4pmax,
0 ≤ mg + F2 + F3 - F4 ≤ 4pmax,
0 ≤ mg - F2 + F3 + F4 ≤ 4pmax.
Используемые при линеаризации уравнений градиенты функций fi имеют вид
⎛
⎞
⎛
⎞
⎛
⎞
0
c2x3
c3x2
f′1(x) = ⎝c1x3⎠, f′2(x) = ⎝
0
⎠, f′3(x) = ⎝c3x1⎠.
c1x2
c2x1
0
Матрицы вторых производных выглядят следующим образом:
⎛
⎞
⎛
⎞
⎛
⎞
0
0
0
0
0
c2
0
c3
0
f′′1(x) = ⎝0
0
c1⎠, f′′2(x) = ⎝0
0
0
⎠,f′′
(x) =⎝c3
0
0⎠.
3
0
c1
0
c2
0
0
0
0
0
Теперь можно легко найти оценки на погрешности линеаризации:
R(j)i,- = -ci∥δ(j)∥2, R(j)i,+ =ci∥δ(j)∥2, i = 1, 2, 3.
2
2
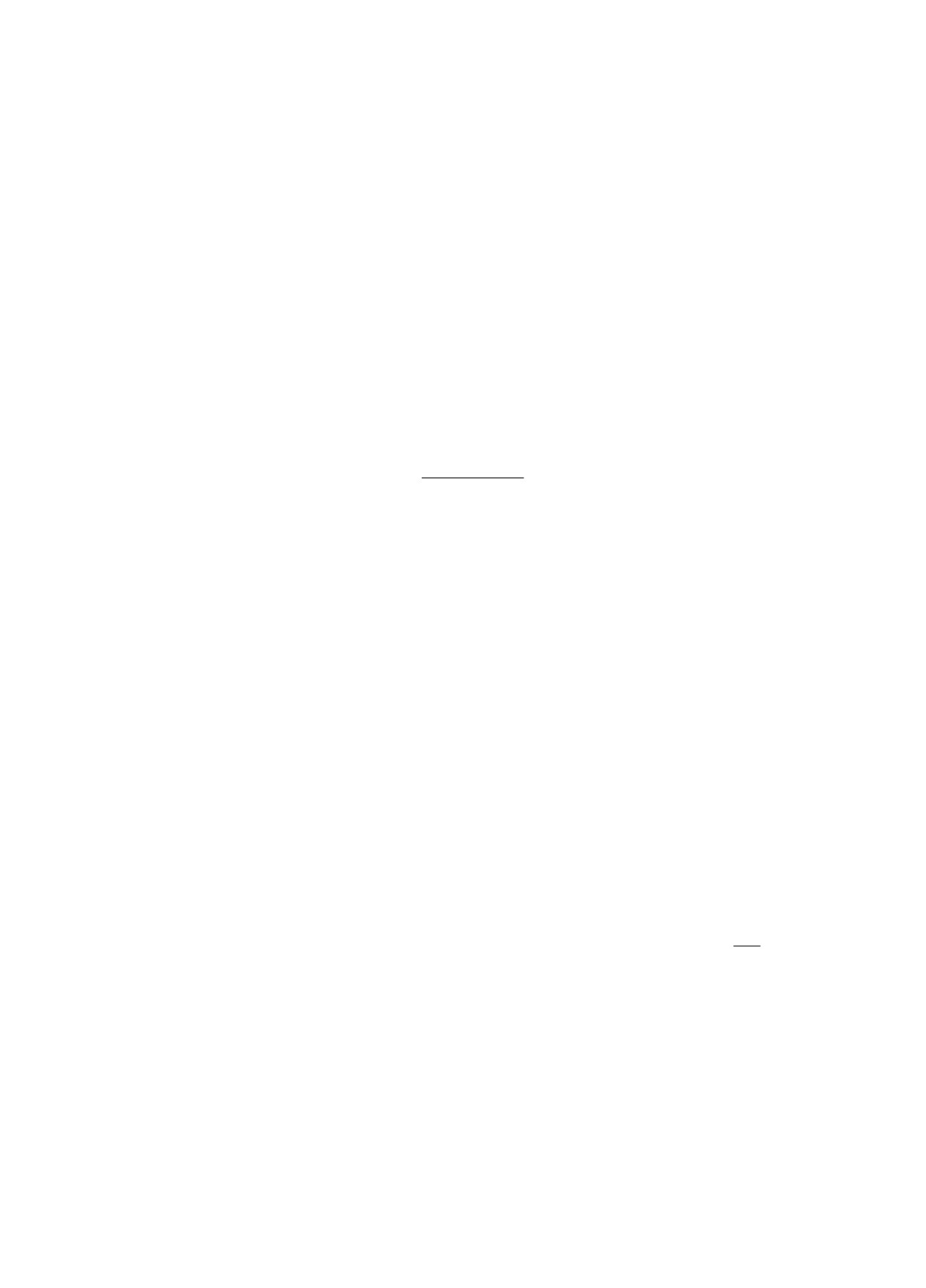
Для расчётов используем параметры квадрокопте-
ра из работы [10]: d = 0.09 м, m = 0.5 кг, Ixx = Iyy =
= 0.0021435 кг·м/рад, Izz = 0.001 кг·м/рад, pmax =
= 1.33 Н. При помощи приведённого выше алгоритма
удалось построить кусочно-аффинные функции Ляпу-
нова и управления в малой окрестности нулевого по-
ложения равновесия. На рис. 2 изображена получен-
ная в результате расчётов область притяжения замк-
нутой системы, являющаяся множеством уровня ку-
сочно-аффинной функции Ляпунова V (x). В приме-
ре Ω = [0, 1] × [0, 1] × [0, 1], отрезки [0, 1] были раз-
биты на n = 10 частей. Алгоритм проработал
100
итераций с максимальным количеством попыток ре-
шения подзадач линейного программирования S = 3.
На каждой итерации обрабатывалась одна очередная
Рис. 2. Область притяжения X .
многогранная область Ω(j), соседняя по отношению к
ранее обработанным.
Заключение. Рассмотрена задача стабилизации для нелинейной системы дифференци-
альных уравнений. Предложен метод приближённого построения непрерывного кусочно-аф-
финного управления, а также соответствующей функции Ляпунова. Доказана теорема о доста-
точных условиях решения задачи стабилизации при помощи такого управления. Предложен-
ные в работе методы и идеи будут в дальнейшем использованы для решения задач стабилиза-
ции систем большой размерности, что потребует более тщательного анализа соответствующих
численных методов и алгоритмов.
Результаты пп. 1-4 получены при финансовой поддержке Российского научного фонда
(проект 22-11-00042). Результаты п. 5 получены при поддержке Министерства науки и высше-
го образования Российской Федерации в рамках реализации программы Московского центра
фундаментальной и прикладной математики по соглашению № 075-15-2022-284.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
О ПОСТРОЕНИИ КУСОЧНО-АФФИННОГО СТАБИЛИЗАТОРА
1547
СПИСОК ЛИТЕРАТУРЫ
1. Красовский Н.Н. Проблемы стабилизации управляемых движений // Малкин И.Г. Теория устой-
чивости движения. Дополнение 4. М., 1966. С. 475-515.
2. Giesl P., Hafstein S. Existence of piecewise linear Lyapunov functions in arbitrary dimensions // Discret.
and Contin. Dyn. Syst. 2012. V. 32. № 10. P. 3539-3565.
3. Baier R., Hafstein S. Numerical computation of control Lyapunov functions in the sense of generalized
gradients // 21st International Symposium on Mathematical Theory of Networks and Systems (MTNS
2014). Groningen, 2014. P. 1173-1180.
4. Атанесян А.А., Точилин П.А. Задача стабилизации системы с переключениями при помощи ку-
сочно-линейного управления // Вестн. Московского ун-та. Сер. 15: Вычислит. математика и кибер-
нетика. 2019. № 4. С. 22-32.
5. Куржанский А.Б., Точилин П.А. Слабо инвариантные множества гибридных систем // Диффе-
ренц. уравнения. 2008. Т. 44. № 11. С. 1523-1533.
6. Точилин П.А. О построении кусочно-аффинной функции цены в задаче оптимального управления
на бесконечном отрезке времени // Тр. Ин-та математики и механики УрО РАН. 2020. Т. 26. № 1.
С. 223-238.
7. Барбашин Е.А. Введение в теорию устойчивости. М., 2014.
8. Красовский Н.Н. Некоторые задачи теории устойчивости движения. М., 1959.
9. Схрейвер А. Теория линейного и целочисленного программирования. М., 1991.
10. Каплунова Е.П., Точилин П.А. Задача целевого управления квадрокоптером при движении в го-
ризонтальной плоскости с огибанием препятствий // Вестн. Московского ун-та. Сер. 15: Вычислит.
математика и кибернетика. 2021. № 4. С. 21-36.
Московский государственный университет
Поступила в редакцию 03.06.2022 г.
имени М.В. Ломоносова,
После доработки 03.09.2022 г.
Университет МГУ-ППИ в Шэньчжэне,
Принята к публикации 21.10.2022 г.
Институт проблем управления
имени В.А. Трапезникова РАН, г. Москва
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022