ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2022, том 58, № 11, с. 1548-1556
ТЕОРИЯ УПРАВЛЕНИЯ
УДК 517.977
ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПОСТРОЕНИЯ
НЕЙРОРЕГУЛЯТОРА ДЛЯ ПЕРЕКЛЮЧАЕМЫХ СИСТЕМ
© 2022 г. А. С. Фурсов, Ю. М. Мосолова
Рассматривается задача стабилизации переключаемой линейной системы с медленными
переключениями, недоступными для наблюдения. Решение ищется в классе регуляторов
переменной структуры. Для обеспечения работоспособности такого регулятора необходимо
построение наблюдателя переключающего сигнала. В качестве наблюдателя предлагается
использовать нейросеть, теоретическим аспектам настройки которой и посвящена настоя-
щая работа.
DOI: 10.31857/S0374064122110103, EDN: MCFCOP
1. Постановка задачи. Рассматривается непрерывная скалярная переключаемая линей-
ная система
x = Aσx + bσu, σ ∈ Sτ,
(1)
где σ : R+ → I = {1, . . . , m} - непрерывная справа кусочно-постоянная функция (переключа-
ющий сигнал) с конечным числом разрывов (переключений) на любом конечном промежутке;
Sτ - множество всех переключающих сигналов σ, для которых время между любыми дву-
мя соседними переключениями не меньше τ (τ > 0); I - множество индексов, нумерующих
режимы функционирования системы (1); Aσ = A ◦ σ - композиция отображения A : I →
→ {A1, . . . , Am} (Ai ∈ Rn×n) и переключающего сигнала σ, bσ = b ◦ σ - аналогичная ком-
позиция для отображения b : I → {b1, . . . , bm} (bi ∈ Rn); пары матриц (Ai, bi), i = 1, m,
определяют режимы функционирования системы (1); x ∈ Rn - вектор состояния, u ∈ R1 -
управляющий вход.
Задача. Требуется стабилизировать систему (1) в заданной окрестности нуля D(0; γ) =
= {x ∈ Rn : ∥x∥ ≤ γ}, т.е. построить обратную связь u = u(x) такую, что для некоторого
γ > 0 и любых x(0) ∈ D(0;γ), σ ∈ Sτ норма соответствующего решения x(t) удовлетворяет
условиям:
1) ∥x(t)∥ → 0 при t → ∞;
2) ∥x(t)∥ ≤ γ при t ∈ [0, ∞).
При этом вектор-функция x(t) определяется как решение следующей нестационарной сис-
темы с кусочно-постоянными коэффициентами:
x = Aσ(t)x + bσ(t)u(x), x(0) = x0, σ ∈ Sτ.
Далее для векторов будем рассматривать норму ∥x∥ = max|xi|, а для матриц - норму ∥A∥ =
∑
i
= max
|aij |.
j
i
Известные подходы к решению сформулированной выше задачи стабилизации можно раз-
бить на две группы. К первой группе относятся методы, предполагающие построение единого
регулятора для семейства динамических систем, включающего все различные режимы (Ai, bi)
переключаемой системы (1). Фактически в этом случае речь идет о нахождении одновременно
стабилизирующего регулятора для конечного семейства линейных систем. При этом данный
регулятор должен обеспечивать не только устойчивость каждого режима системы (1), но и
устойчивость траекторий этой системы при любом переключающем сигнале из множества
Sτ . Одним из наиболее известных методов, позволяющих синтезировать подобные регулято-
ры, является метод квадратичной стабилизации [1, с. 49], основанный на поиске регулятора
в форме статической линейной обратной связи, обеспечивающий существование общей функ-
ции Ляпунова для системы (1), замкнутой этим регулятором. Популярность данного подхода
1548
ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПОСТРОЕНИЯ НЕЙРОРЕГУЛЯТОРА
1549
обусловлена возможностью сведения задачи синтеза такого регулятора к задаче поиска реше-
ний системы линейных матричных неравенств, которая, в свою очередь, допускает численное
решение. Также можно отметить метод сверхстабилизации [2], предполагающий поиск единой
статической обратной связи и обеспечивающей свойство сверхустойчивости для всех замкну-
тых режимов системы (1). В этом случае поиск стабилизатора может быть сведён к решению
задачи линейного программирования [3]. Отметим, что упомянутые методы имеют свои до-
стоинства и недостатки. К достоинствам можно отнести тот факт, что регуляторы, найденные
в соответствии с методом квадратичной стабилизации или методом сверхстабилизации, на са-
мом деле решают более общую задачу, а именно, обеспечивают устойчивость переключаемой
системы при произвольных переключениях (когда отсутствует ограничение снизу на время пе-
реключений для различных режимов). С другой стороны, с увеличением количества режимов
шансы на нахождение единого регулятора существенно уменьшаются, поскольку его существо-
вание становится связанным с разрешимостью линейных неравенств большой размерности.
Качественно другой подход к решению поставленной задачи заключается в построении
регулятора переменной структуры (переключаемого регулятора)
u = uσ(x),
(2)
каждый режим которого является стабилизирующей обратной связью u = ui(x) для i-го
режима x = Aix + biu переключаемой системы (1), т.е. обеспечивает асимптотическую устой-
чивость замкнутой системы
x = Aix + biui(x).
(3)
Отметим, что в предположении полной управляемости пары (Ai, bi) стабилизирующую об-
ратную связь для каждого режима системы (1) можно искать в форме линейной статической
обратной связи u = -kix. Известно [4, с. 249], что такая обратная связь всегда существует
как решение задачи модального управления.
Таким образом, система (1), замкнутая регулятором (2), будет иметь вид
x = Aσx + bσuσ(x), σ ∈ Sτ.
Укажем теперь две основные проблемы, которые необходимо решать для обеспечения ра-
ботоспособности указанного выше регулятора переменной структуры. Первая состоит в том,
что для реализации указанного регулятора необходимо знать моменты переключения режи-
мов и номера активных режимов в каждый момент времени, для того чтобы обеспечить син-
хронность переключений регулятора. Но, как правило, такая информация о переключаемой
системе в режиме реального времени недоступна. Вторая проблема заключается в том, что
устойчивость каждого режима (3) переключаемой системы в отдельности не является доста-
точным условием устойчивости самой переключаемой системы (1).
Одно из возможных решений первой проблемы, позволяющее использовать данный регу-
лятор, заключается в построении наблюдателя переключающего сигнала (в дальнейшем бу-
дем называть его просто наблюдателем), который определял бы номер активного режима
для текущего момента времени, что, в свою очередь, позволило бы обеспечить синхронность
переключения регулятора с переключениями режимов. Учитывая известные оценки времени
задержки τ для обеспечения устойчивости переключаемой системы c устойчивыми режимами
(см., например, [5, с. 56; 6; 7]), решение второй проблемы естественно искать, используя эти
оценки при построении регуляторов (2).
2. Подход к решению. В настоящей работе исследуются теоретические аспекты решения
задачи из п. 1 на основе нейросетевого подхода, который заключается в том, что в качестве
упомянутого выше наблюдателя режимов предлагается использовать нейронную сеть [8, с. 55].
Можно считать, что выходом такой нейросети является оценка σ(t) недоступного для изме-
рения переключающего сигнала. При этом регулятор переменной структуры ищем в виде
u = -kσx,
(4)
где σ(t) - оценка переключающего сигнала, σ(t) ∈ {1, . . . , m}, а векторы ki ∈ Rn выбираются
из условий устойчивости матриц Ai - biki.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1550
ФУРСОВ, МОСОЛОВА
Пару - переключаемый регулятор и нейронную сеть - далее будем называть нейрорегуля-
тором. Систему (1), замкнутую нейрорегулятором, можно представить переключаемой систе-
мой следующего вида:
x = (Aσ - bσkσ)x, σ ∈ Sτ,
σ ∈ [S]εp,
(5)
где εp = τ/p - достаточно малая положительная константа, p ∈ N - некоторый фиксиро-
ванный параметр алгоритма наблюдения, [S]εp - множество переключающих сигналов, для
которых моменты переключений принадлежат множеству {lεp}, l = 0, 1, 2, . . . Перенумеруем
(от 1 до m2) все возможные режимы
x = (Ai - bikj)x (i,j = 1,m)
переключаемой системы (5), присвоив каждому (ij)-му режиму соответствующий номер s =
= (i - 1)m + j. Введём функцию ξ : {1, . . . , m2} → {1, . . . , m}, отображающую каждый номер
s в соответствующий ему индекс i, т.е. ξ(s) = i.
Работа нейронной сети в качестве наблюдателя переключающего сигнала осуществляется
в процессе функционирования системы и состоит в следующем: для заданной дискретной по-
следовательности моментов времени lεp , l = 0, 1, 2, . . . , по каждой паре измерений вектора
состояния (x(lεp), x((l + 1)εp)) нейронная сеть должна определять номер s текущего режима
переключаемой системы (5) в момент t = (l + 1)εp. Обозначим выход нейросети в момент
lεp через N[lεp]. На основе данной информации оценка σ[lε] переключающего сигнала σ(t)
строится следующим образом:
σ(t) ≡ ξ(N[lεp]) при t ∈ [lεp, (l + 1)εp), l = 1, 2, . . .
(6)
В результате переключение векторов ki стабилизирующей обратной связи задаёт переключа-
ющий сигнал (6) с некоторым заданным начальным условием σ(0) = σ0
(σ0 ∈ {1,... ,m }).
Описанный наблюдатель далее будем обозначать через Nεp .
Таким образом, основная задача функционирования нейронной сети состоит в построении
оценки σ неизвестного переключающего сигнала σ ∈ Sτ . Дискретную ошибку оценивания
eσ[lτ] (l = 0,1,2,...) сигнала σ(t) определим по формуле
eσ[lτ] = max
μ(i+1)τiτ ,
i=0,l-1
где μ(i+1)τiτ - количество промежутков вида [jεp, (j + 1)εp) ⊂ [iτ, (i + 1)τ], для которых σ(t) ≡
≡ σ(jεp). Заметим, что такой выбор ошибки eσ[lτ] удобен для дальнейшего оценивания
окрестности положения равновесия (см. п. 5), используемой для формирования обучающей
выборки для нейросетевого наблюдателя.
Можно выделить несколько основных шагов настройки нейрорегулятора:
1) выбор структуры нейросети;
2) выбор регуляторов u = -kix, обеспечивающих достаточно быстрое затухание переход-
ных процессов замкнутых режимов переключаемой системы с учётом времени задержки τ;
3) выбор величины εp c учётом ограничений на ошибку оценивания и времени задержки τ;
4) расчёт величины γ (см. условие задачи в п. 1) с учётом ограничений на ошибку оцени-
вания и размера окрестности D(0; γ);
5) построение обучающей выборки для нейросети с учётом величины γ;
6) обучение нейросети на промежутке [0, εp];
7) проверка работоспособности нейросети по определению текущего активного режима;
8) моделирование переключаемой системы (1), замкнутой построенным нейрорегулятором.
Далее обсуждаются теоретические вопросы, связанные с настройкой и работоспособностью
нейрорегулятора. К ним относятся, главным образом, задачи, сформулированные в перечис-
ленных выше пп. 2)-5).
3. Выбор режимов переключаемого регулятора. Построение стабилизирующего ре-
гулятора переменной структуры для системы (1) в случае ненаблюдаемых переключающих
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПОСТРОЕНИЯ НЕЙРОРЕГУЛЯТОРА
1551
сигналов включает два основных шага: построение стабилизирующих регуляторов для каж-
дого режима в отдельности и настройка алгоритма их переключений. Рассмотрим первый
шаг. Как было указано выше, необходимым условием устойчивости переключаемой системы
является асимптотическая устойчивость каждого её режима. К сожалению, это условие не яв-
ляется достаточным и требует усиления в зависимости от класса допустимых переключающих
сигналов. Поскольку в работе рассматривается случай медленных переключений с заданным
временем задержки τ, то при синтезе регулятора переменной структуры, при построении ста-
билизаторов для каждого режима системы (1) можно использовать подход, основанный на
достаточном условии устойчивости переключаемых линейных систем, сформулированный в
работе [7].
Итак, в предположении полной управляемости пар (Ai, bi), i = 1, m, для каждого режима
x=Aix+biu
построим обратную связь u = -kix, обеспечивающую простой вещественный и устойчивый
спектр матрицы замкнутой системы
x = (Ai - biki)x,
(7)
т.е. Spec (Ai - biki) ⊂ R- и для любых sj, sm ∈ Spec (Ai - biki) следует, что sj = sm.
В этом случае для нормы вектора решения системы (7) можно записать [9, с. 57] следую-
щую оценку:
∥x(t)∥ ≤ ∥eΛii(t-s)∥ · ∥x(s)∥ ≤ ciieαii(t-s)∥x(s)∥, t ≥ s ≥ 0,
где
Λii = Ai - biki, αii =
max
λik < 0, cii = ∥M-1ii∥ · ∥Mii∥.
λik∈Spec {Λii}
Здесь Mii - матрица преобразования, приводящая матрицу Λii к диагональному виду Jii =
= diag {λi1,... ,λin}, т.е.
Jii = M-1iiΛiiMii.
Заметим, что столбцами матриц Mii являются собственные векторы соответствующих мат-
риц Λii.
Обозначим
α = max
αii, c = max cii.
i=1,m
i=1,m
В соответствии с достаточным условием устойчивости [7] переключаемая система с режимами
(7) является устойчивой при любых переключающих режимах из множества Sτ , если
2
1
2 ln c
τ >
ln
=
(8)
α
c
|α|
Для выполнения условия (8) можно рекомендовать строить регуляторы u = -kix, обес-
печивающие достаточно большую величину α, что всегда возможно в силу предположения о
полной управляемости пар (Ai, bi). Известно, как правило, что c = O(|α|n-1).
4. Квантование времени работы наблюдателя переключающего сигнала. Как уже
отмечалось выше, основная проблема при реализации регулятора переменной структуры сос-
тоит в том, что для его работоспособности нужна информация о текущем переключающем
сигнале, что позволит обеспечить синхронность переключения режимов регулятора с пере-
ключениями режимов системы, и если переключающий сигнал недоступен для измерения, то
необходимо использовать наблюдателя для оценки текущего значения переключающего сигна-
ла. Выше (см. п. 2) был определён наблюдатель, работающий на основе нейросети. Фактически
данный наблюдатель представляет собой дискретную систему, выход которой управляет пере-
ключением режимов регулятора переменной структуры. В идеале режимы регулятора должны
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1552
ФУРСОВ, МОСОЛОВА
переключаться синхронно с переключениями режимов системы (1). Однако моменты переклю-
чений системы (1), обусловленные переключающими сигналами σ ∈ Sτ , совершенно не обя-
зательно должны совпадать с дискретной последовательностью {lε} моментов срабатывания
нейросети. В результате этого могут возникать ошибки нейросети в определении номера актив-
ного режима замкнутой системы (5), что, в свою очередь, влечёт за собой неверное включение
очередного режима регулятора. Более того, нельзя исключать и того факта, что нейросеть мо-
жет самопроизвольно выдавать ошибочное значение активного режима. Достаточно полную
информацию о корректности работы нейросети содержит введённая выше ошибка оценивания
переключающего сигнала eτ [lτ], на основе которой ниже будет сформулировано достаточное
условие устойчивости переключаемой системы (1), замкнутой нейрорегулятором (4), (6).
Далее потребуется следующая лемма, доказательство которой аналогично рассуждениям
теоремы 6 работы [7].
Лемма. Пусть для системы
x = Aσx, σ ∈ Sτ,
(9)
существуют константы d > 1 и q > 0 такие, что для любого переключающего сигнала
σ ∈ Sτ и начального условия x(0) ∈ Rn для соответствующего решения x(t) справедливы
неравенства:
1) ∥x((i + 1)q)∥ < ∥x(iq)∥/d для всех i = 0, 1, . . . ;
2) ∥x(t)∥ < ∥x(iq)∥ для всех t ∈ [(i + 1)q, (i + 2)q], i = 0, 1, . . .
Тогда для любого начального условия x(0) ∈ Rn и любого переключающего сигнала σ ∈ Sτ
норма соответствующего решения системы (9) стремится к нулю, т.е.
∥x(t)∥ → 0, t → ∞.
Далее будем использовать обозначение
Λij = Ai - bikj, i,j = 1,m.
Пусть Jij - жорданова нормальная форма для Λij, а Mij - матрица, приводящая Λij к
соответствующей жордановой форме Jij . Положим
αij =
max
Re (λ(ij)k).
λ(ij)∈Spec Λij
k
Для систем
x = (Ai - bikj)x, i = j,
можно записать следующие оценки для норм решений [8]
∥x(t)∥ ≤ ∥eΛij (t-s)∥∥x(t)∥ ≤ cij eαij (t-s)Pij(t - s)∥x(t)∥,
∑rij-1
здесь cij = ∥M-1ij∥∥Mij ∥, Pij (t) =
(tk/k!), rij - размер максимальной клетки Жордана
k=0
в жордановой нормальной форме Jij матрицы Λij .
Обозначим
ρ = max
αij, β = max
cij,
r = max
rij.
i,j=1,m
i,j=1,m
i,j=1,m
i=j
i=j
i=j
Без ограничения общности будем считать, что ρ > 0.
Сформулируем теперь достаточное условие устойчивости замкнутой системы (5).
Теорема 1. Пусть для замкнутой системы (5) при любом переключающем сигнале σ ∈
∈ Sτ и любом начальном условии x(0) ∈ Rn наблюдатель Nεp генерирует оценку σ ∈ [S]εp
с ошибкой, удовлетворяющей условию
eσ[lτ] ≤ θ, l = 1,2,... ,
для некоторого θ ∈ N,
0 ≤ θ ≤ [p/2].
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПОСТРОЕНИЯ НЕЙРОРЕГУЛЯТОРА
1553
Тогда, если
2
1
τ >
ln
,
α
h
где h = cθ+2βθPθ(εp)e(ρ-α)θεp , для любого начального условия x(0) ∈ Rn и любого переключа-
ющего сигнала σ ∈ Sτ норма соответствующего решения системы (5) стремится к нулю:
∥x(t)∥ → 0, t → ∞.
Доказательство. Прежде всего заметим, что h > 1, а из определения наблюдателя Nεp
следует, что θ ≥ 1. Далее, в силу условия теоремы на каждом отрезке [iτ, (i + 1)τ], i =
= 0, 1, . . . , максимальное число промежутков [lεp, (l + r)εp) (l ∈ N
⋃ {0}, r ∈ N), на которых
σ(t) ≡ σ[lεp], не более θ (при этом для каждого l число r фактически равно количеству “скле-
енных” промежутков длины εp, на которых выполнено указанное тождество), максимальное
число промежутков вида [lεp, (l + r)εp) (l ∈ N
⋃ {0}, r ∈ N), на которых σ(t) ≡ σ[lεp], не
более θ + 1 и не более одного промежутка вида [lεp, (l + 1)εp), содержащего точку разрыва
переключающего сигнала σ(t) (соответственно на таком промежутке σ(t) ≡ σ[lεp]). Заметим,
что для всех l ∈ N
⋃ {0} верны следующие неравенства:
∥x((l + 1)εp)∥ ≤ c∥x(lεp)∥eαεp , если σ(t) ≡ σ[lεp],
∥x((l + 1)εp)∥ ≤ β∥x(lεp)∥P (εp)eρεp , если σ(t) ≡ σ[lεp],
(10)
а если σ(t) ≡ σ[lεp] на промежутке [lεp, (l + 1)εp), внутри которого лежит точка разрыва
переключающего сигнала σ(t), то справедлива оценка
∥x((l + 1)εp)∥ ≤ cβP (εp)eρεp ∥x(lεp)∥.
(11)
Из неравенств (10) и (11) нетрудно получить следующую оценку для решений системы (5):
∥x((i + 1)τ)∥ ≤ h∥x(iτ)∥eατ , i = 0, 1, . . .
(12)
Учитывая, что α < 0, в силу условия теоремы получаем цепочку неравенств
2
τ >
ln h-1, ατ < ln h-2, eατ < h-2,
∥x(iτ)∥eατ < h-2∥x(iτ)∥,
α
откуда
h2∥x(iτ)∥eατ < ∥x(iτ)∥.
(13)
Далее из (12) и (13) имеем
h∥x((i + 1)τ)∥ ≤ h2∥x(iτ)∥eατ < ∥x(iτ)∥.
Отсюда окончательно получаем
1
∥x((i + 1)τ)∥ <
∥x(iτ)∥, i = 0, 1, . . .
(14)
h
Таким образом, показано, что для замкнутой системы (5) выполнен п. 1) леммы при q = τ,
d = h. Докажем теперь, что для этой системы выполняется также и п. 2) леммы.
Действительно, зафиксируем произвольное t ∈ [(i+1)τ, (i+2)τ], i = 0, 1, . . . , и рассмотрим
два случая.
1) Пусть t ∈ [lεp, (l + 1)εp) ⊂ [(i + 1)τ, (i + 2)τ] и на этом промежутке σ(t) ≡ σ[lεp]. Далее,
пусть на отрезке [(i + 1)τ, (i + 2)τ] левее t располагается κ промежутков вида [lεp, (l + 1)εp),
для которых σ(t) ≡ σ[lεp] и r промежутков такого же вида, где σ(t) ≡ σ[lεp]. Тогда, учитывая
(10) и (11), получаем оценку
∥x(t)∥ ≤ cr+1βκPκ(εp)e(ρ-α)κεp c∥x((i + 1)τ)∥eα(t-(i+1)τ).
8
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
1554
ФУРСОВ, МОСОЛОВА
Поскольку eα(t-(i+1)τ) < 1, то справедливо неравенство
∥x(t)∥ ≤ cr+2βκPκ(εp)e(ρ-α)κεp ∥x((i + 1)τ)∥.
(15)
Отсюда, учитывая (14), получаем
∥x(t)∥ ≤ cr+2βκPκ(εp)e(ρ-α)κεp c∥x((i + 1)τ)∥ <
1
cr+2βκPκ(εp)e(ρ-α)κεp
< cr+2βκPκ(εp)e(ρ-α)κεp
∥x(i)τ)∥ =
∥x(i)τ)∥.
h
cθ+2βθPθ(εp)e(ρ-α)θεp
В силу того, что в рассматриваемом случае r ≤ θ, κ ≤ θ, дробь в последнем неравенстве не
превосходит единицы и тогда окончательно имеем
∥x(t)∥ < ∥x(iτ)∥.
(16)
2) Пусть теперь t ∈ [lεp, (l + 1)εp) ⊂ [(i + 1)τ, (i + 2)τ] и на этом промежутке σ(t) ≡
≡ σ[lεp]. Также, как и в случае 1), пусть на отрезке [(i + 1)τ,(i + 2)τ] левее t располагается
κ промежутков вида [lεp, (l + 1)εp), для которых σ(t) ≡ σ[lεp] и r промежутков такого же
вида, где σ(t) ≡ σ[lεp]. Тогда, рассуждая как и в случае 1) и учитывая (10) и (11), получаем
оценку
∥x(t)∥ ≤ cr+1βκPκ(εp)e(ρ-α)κεp βP (εp)∥x((i + 1)τ)∥eρ(t-(i+1)τ) ≤
≤ cr+1βκ+1Pκ+1(εp)e(ρ-α)(κ+1)εp∥x((i + 1)τ)∥.
(17)
Отсюда с учётом (14) имеем
∥x(t)∥ ≤ cr+1βκ+1Pκ+1(εp)e(ρ-α)(κ+1)εp ∥x((i + 1)τ)∥ <
1
cr+1βκ+1Pκ+1(εp)e(ρ-α)(κ+1)εp
< cr+1βκ+1Pκ+1(εp)e(ρ-α)(κ+1)εp
∥x(iτ)∥ =
∥x(iτ)∥.
h
cθ+2βθPθ(εp)e(ρ-α)θεp
В силу того, что в рассматриваемом случае r ≤ θ, κ + 1 ≤ θ, дробь в последнем неравенстве
не превосходит единицы, и в случае 2) также имеет место неравенство (16).
Таким образом, получили, что при выполнении условий теоремы 1 выполняются условия
леммы, а тогда для любого начального условия x(0) ∈ Rn и любого переключающего сигнала
σ ∈ Sτ норма соответствующего решения замкнутой системы (5) стремится к нулю. Теорема 1
доказана.
5. Оценка окрестности положения равновесия для формирования обучающей
выборки. Как было отмечено в п. 2, задача нейросети состоит в том, чтобы по каждой паре
измерений вектора состояния (x(lεp), x((l + 1)εp)) нейронная сеть определяла бы номер s
текущего режима переключаемой системы (5) в момент t = (l + 1)εp. Причём считаем, что
эту задачу нейросеть должна правильно решать в предположении, что на рассматриваемом
отрезке [lεp, (l + 1)εp] отсутствуют точки разрыва сигнала σ(t). И поскольку в этом случае
на таких отрезках будет активен один из линейных стационарных режимов системы (5), то
x((l + 1)εp) = x(εp), если x(lεp) = x(0). Таким образом, нейронную сеть достаточно обучить
на векторах вида (x(0), x(εp)), построенных для всех возможных режимов системы (5). При
этом необходимо решить вопрос об окрестности нуля, по которой будет строиться выборка для
обучения нейросети. В качестве таковой можно выбрать окрестность D(0; γ) (см. постановку
задачи в п. 1). Следующая теорема даёт оценку величины γ по заданной ошибке оценивания
переключающего сигнала eσ[lτ].
Теорема 2. Пусть выполнены условия теоремы 1. Тогда при любом начальном условии
x(0) ∈ D(0; γ) и любом переключающем сигнале σ ∈ Sτ выполнено неравенство
∥x(t)∥ ≤ γ, t ∈ [0, +∞),
где
γ = hγ.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПОСТРОЕНИЯ НЕЙРОРЕГУЛЯТОРА
1555
Действительно, если выполнены условия теоремы 1, то из полученных в ходе её доказа-
тельства неравенств (14) и (16) следует, что для любого переключающего сигнала σ ∈ Sτ и
начального условия x(0) ∈ Rn для соответствующего решения x(t) справедливы неравенства:
1) ∥x((i + 1)τ)∥ < ∥x(iτ)∥/h для всех i = 0, 1, . . . ;
2) ∥x(t)∥ < ∥x(iτ)∥ для всех t ∈ [(i + 1)τ, (i + 2)τ], i = 0, 1, . . .
Из этих неравенств следует, что для расчёта величины γ достаточно оценить наибольшее
значение нормы вектора x(t) на промежутке [0, τ]. Учитывая оценки (15) и (17), получаем
∥x(t)∥ ≤ cθ+2βθPθ(εp)e(ρ-α)θεp ∥x(0)∥ ≤ hγ
при всех t ∈ [0, τ]. Теорема доказана.
6. Численное моделирование. Полученные результаты продемонстрируем на численном
примере. Рассмотрим задачу стабилизации (см. п. 1) для переключаемой линейной системы
x = Aσx + bσu, σ ∈ Sτ, σ(t) ∈ I = {1,2,3},
(18)
где
(
)
(
)
(
)
(
)
(
)
(
)
-2
1
1
-1
-1
0
1
1
0
A1 =
,
b1 =
,
A2 =
,
b2 =
,
A3 =
,
b3 =
−1
1
-1
0
1
2
1
2
-2
Считаем, что τ = 1, γ = 2.
Стабилизирующий регулятор для системы (18) ищем в виде
u = -kσx,
σ(t) ∈ {1, 2, 3}.
(19)
)
Используя рассуждения п. 3, выберем следующие значения ki : k1 =
(-0.4
-0.1
, k2 =
)
)
=
(-0.2
0.3
, k3 =
(-1.4
-1.8
. Пусть p = 20, тогда ϵp = 0.05. В качестве наблюдателя
Nεp выберем обобщённую регрессионную двухуровневую нейронную сеть. При условии, что
наблюдатель Nεp генерирует оценку
σ ∈ [S]εp с ошибкой eσ[lτ] ≤ 1 (априорная ошибка
θ = 1), рассчитаем величины h, γ в соответствии с результатами пп. 4, 5: h = 24.3, γ = 68.9.
Далее с использованием величины γ осуществляется обучение нейросети с помощью функции
newgrnn пакета Matlab.
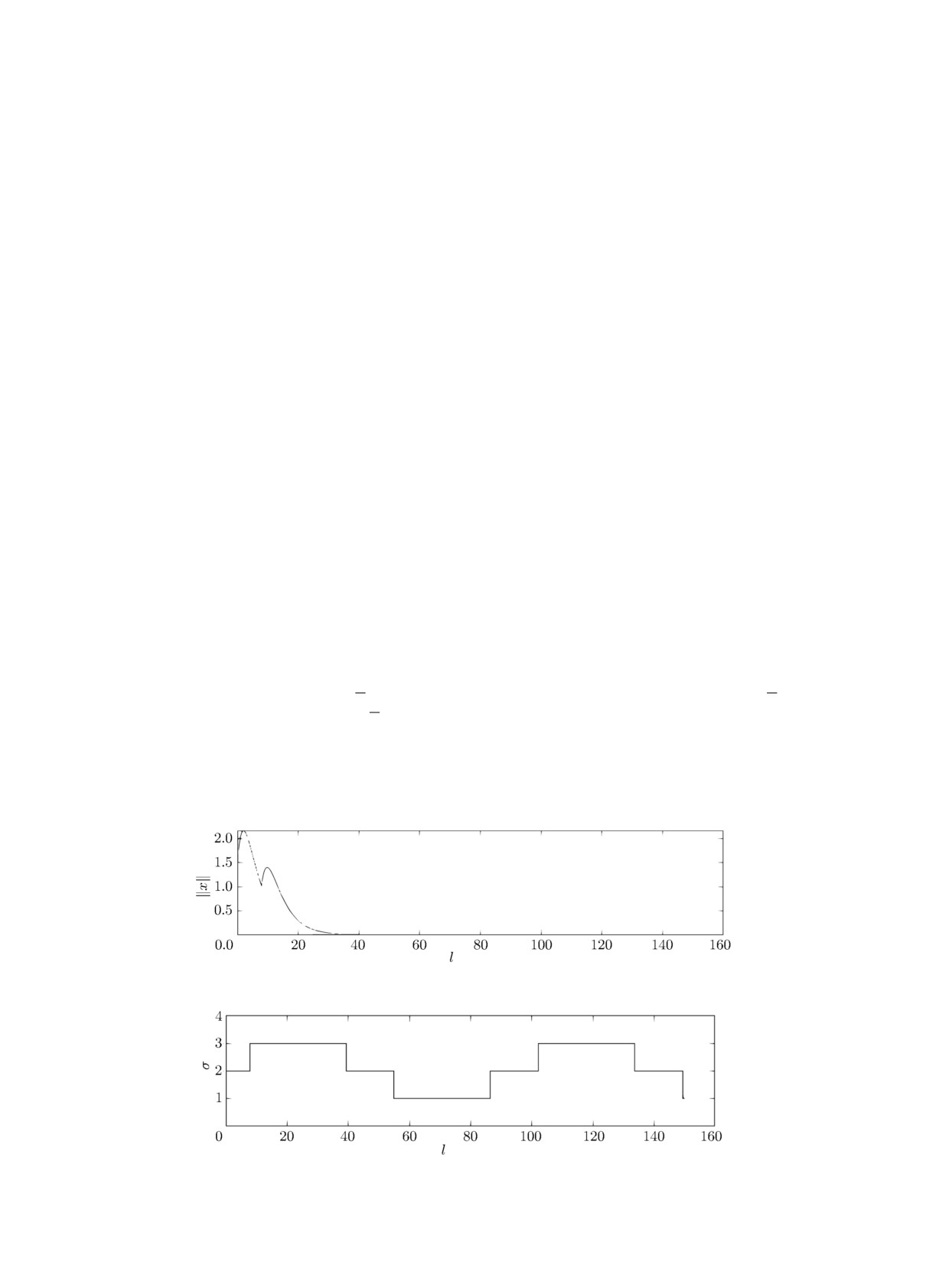
На рис. 1 представлены результаты численного моделирования в пакете Matlab решения
замкнутой системы (18), (19) при начальных условиях x1(0) = 1.5, x2(0) = 1 и некотором
переключающем сигнале σ (рис. 2).
Рис. 1. Поведение нормы решения замкнутой системы.
Рис. 2. Переключающий сигнал.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022
8∗
1556
ФУРСОВ, МОСОЛОВА
Моделирование проведено для t ∈ [0, 150]. Его результаты показали, что апостериорная
ошибка наблюдателя равна также единице, а норма решения стремится к нулю, что подтвер-
ждает работоспособность построенного стабилизатора.
Работа выполнена при финансовой поддержке Российского научного фонда (проект 22-21-
00162).
СПИСОК ЛИТЕРАТУРЫ
1. Баландин Д.В., Коган М.М. Синтез законов управления на основе линейных матричных неравенств.
М., 2007.
2. Поляк Б.Т., Щербаков П.С. Сверхустойчивые линейные системы управления. I. Анализ // Автома-
тика и телемеханика. 2002. № 8. С. 37-53.
3. Фурсов А.С., Мосолова Ю.М., Миняев С.И. Цифровая сверхстабилизация переключаемой интер-
вальной линейной системы // Дифференц. уравнения. 2020. Т. 56. № 11. С. 1516-1527.
4. Андреев Ю.Н. Управление конечномерными линейными объектами. М., 1976.
5. Liberzon D. Switching in Systems and Control. Boston, 2003.
6. Фурсов А.С., Хусаинов Э.Ф. К вопросу о стабилизации переключаемых линейных систем // Диф-
ференц. уравнения. 2015. Т. 51. № 11. C. 1522-1533.
7. Фурсов А.С., Хусаинов Э.Ф. Сверхстабилизация линейных динамических объектов при действии
операторных возмущений // Дифференц. уравнения. 2014. Т. 50. № 7. C. 865-876.
8. Хайкин С. Нейронные сети. М., 2006.
9. Демидович Б.П. Лекции по математической теории устойчивости. М., 1967.
Электротехнический университет, г. Ханчжоу, Китай,
Поступила в редакцию 31.05.2022 г.
Московский государственный университет
После доработки 21.07.2022 г.
имени М.В. Ломоносова,
Принята к публикации 15.08.2022 г.
Институт проблем передачи информации
имени А.А. Харкевича, г. Москва
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№ 11
2022