ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2022, том 58, № 7, с.995-1008
ЧИСЛЕННЫЕ МЕТОДЫ
УДК 519.6+517.9
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
СО СТАБИЛИЗАТОРОМ ДРОБНОЙ ГЛАДКОСТИ
В ЗАДАЧЕ ВОССТАНОВЛЕНИЯ ВОЛНОВОГО ФРОНТА
ПО ЕГО НАКЛОНАМ
© 2022 г. А. В. Разгулин, Н. Г. Ирошников, А. В. Ларичев,
С. А. Турганбаев, Т. Е. Романенко
Рассматривается проекционный метод со стабилизатором дробной гладкости для аппрок-
симации задачи восстановления волнового фронта по его наклонам. Показана устойчивость
метода в шкале периодических функций двух аргументов. Найдены условия согласования
параметров стабилизатора с шагом сетки, позволяющие провести вывод согласованных с
гладкостью наклонов оценок скорости сходимости проекционного метода. С помощью тео-
рии интерполяции получены оценки точности метода при естественных требованиях на
гладкость наклонов из шкалы анизотропных пространств Соболева дробной гладкости.
DOI: 10.31857/S037406412207010X, EDN: CERLCH
Введение. Одной из важных задач адаптивной оптики является восстановление волново-
го фронта по данным об измерениях его локальных наклонов. Такие измерения проводятся с
помощью датчика Шака-Гартмана (см., например, [1]), который также с успехом применяется
для оценки параметров атмосферной турбулентности [2], при конструировании оптоэлектрон-
ных инструментов [3], в прикладных задачах медицинской физики [4] и в др. областях. По-
скольку на практике измерения наклонов сопровождаются искажениями различной природы,
то данные о наклонах обычно являются негладкими функциями координат. Кроме того, сами
волновые фронты зачастую являются негладкими и даже разрывными. Разработка устойчи-
вых методов восстановления волнового фронта в этих условиях является весьма актуальной
задачей (см. работы [5-10]).
Ранее в статьях [9, 10] было предложено семейство новых методов реконструкции волнового
фронта, в основе которых лежит вариационный подход в сочетании с проекционным методом
на основе билинейных сплайнов. Такая комбинация методов наилучшим образом подходит для
случая восстановления волнового фронта, не обладающего высокой гладкостью и не обяза-
тельно непрерывного. Отличительной особенностью схем работы [10] является использование
стабилизатора с разностными производными второго порядка в дробной степени, нацеленного
на улучшение пространственно-частотной характеристики (ПЧХ) метода, причём параметры
стабилизатора выбираются также на основе вариационного подхода. В сравнении с широко
используемым методом Симпсона [5] семейство методов в статье [10] позволяет достичь луч-
шего профиля ПЧХ в области высоких частот, а по сравнению с семейством кумулятивных
методов в работе [6] в практическом применении не приводит к накоплению погрешности и
устойчиво работает в случае потери данных о наклонах.
Представляемые в данной статье результаты посвящены исследованию точности проекци-
онного метода, описанного в [10], используемого для конечномерной аппроксимации вариаци-
онной задачи восстановления волнового фронта. Сложностью рассматриваемой задачи явля-
ется возможная негладкость волновых фронтов и, соответственно, необходимость развивать
такие способы исследования погрешности, которые позволяли бы получать оценки скорости
сходимости аппроксимаций в естественных функциональных классах исходных данных (на-
клонов) без априорных предположений об их дополнительной гладкости.
1. Вариационный метод восстановления волнового фронта по его наклонам. Опи-
шем и исследуем вариационный подход к восстановлению волнового фронта u(x, y) по изме-
рениям его наклонов g1(x, y), g2(x, y) вдоль соответствующих направлений x и y. Отметим,
995
9∗
996
РАЗГУЛИН и др.
что непосредственное восстановление волнового фронта из условия равенства градиентов вол-
нового фронта (или их конечномерных аппроксимаций) измеряемым наклонам приводит к
операторному уравнению первого рода, которое представляет собой плохообусловленную за-
дачу (см. [7]), устойчивое решение которой строится на основе регуляризованного варианта
метода сингулярных разложений. Вместо операторного уравнения сформулируем задачу вос-
становления волнового фронта в пределах квадратной апертуры T2 = [-π, π] × [-π, π] в виде
задачи минимизации функционала невязки J(u):
∫∫
J (u) =
((ux(x, y) - g1(x, y))2 + (uy(x, y) - g2(x, y))2) dx dy.
(1)
T2
Функционал J(u) задаёт среднеквадратичное отклонение между наблюдаемыми наклонами
волнового фронта g1(x, y), g2(x, y) и соответствующими производными ux = ∂u/∂x, uy =
= ∂u/∂y искомого волнового фронта.
Для дальнейшего изложения
∫∫
верждения. Сокращения 〈u, φ〉 =T2 u(x, y)φ(x, y) dx dy и ∥u∥ = (〈u, u〉)1/2 обозначают стан-
дартные скалярное произведение и норму в L2(T2). Для вектора наклонов g = (g1, g2) ∈
∈ L2(T2) × L2(T2) используется евклидова норма ∥g∥ = (∥g1∥2 + ∥g2∥2)1/2. Для полной орто-
нормированной в L2(T2) системы комплексных экспонент ek,m(x, y) = (2π)-1 exp(i(kx + my)),
k,m ∈ Z, и коэффициентов ûk,m = 〈u,e∗k,m〉, e∗k,m = e-k,-m разложения функции u ∈ L2(T2)
∑
по этой системе в силу равенства Парсеваля имеем ∥u∥2 =(k,m)∈Z2 |ûk,m|2.
Будем использовать анизотропные пространства функций
∑
(1 + k2s + m2r)|ûk,m|2 < +∞}, s, r > 0.
Hs,r(T2) = {u ∈ L2(T2) : ∥u∥2Hs,r(T2)=
(k,m)∈Z2
Нетрудно видеть, что по теореме о следах [11, гл. 1, § 4] используемые далее пространст-
ва Hs,0(T2) (H0,r(T2)) при s > 0.5 (r > 0.5 соответственно) состоят из 2π-периодических
функций по переменной x (y соответственно), которые Гёльдер-непрерывны по x (y соот-
ветственно) со значениями в L2(0, 2π) с показателем s - 0.5 (r - 0.5 соответственно).
Будем использовать изотропное пространство функций Hs(T2) = Hs,s(T2). В частности,
пространство H1(T2) является замкнутым подпространством пространства Соболева H1 на
множестве T2 (см. [12, гл. 3]) с эквивалентными нормами
∑
∥u∥H1 = (∥u∥2 + ∥ux∥2 + ∥uy∥2)1/2,
(1 + k2 + m2)|ûk,m|2.
∥u∥2H1(T2)=
(k,m)∈Z2
Для пространства Соболева второго порядка H2 используется норма
∥u∥H2 = (∥u∥2 + ∥ux∥2 + ∥uy∥2 + ∥uxx∥2 + ∥uxy∥2 + ∥uyy∥2)1/2.
Рассмотрим подпространство
Hθ(T2) функций с нулевым средним (или, что то же самое,
∫∫
û0,0 = 0), т.е.
Hθ(T2) = {u ∈ Hθ(T2) :T2 u(x,y)dxdy = 0}. Для функций из
H1(T2) имеет
место неравенство Пуанкаре
∫∫
∫∫
(|ux|2 + |uy|2) dx dy ≥
|u|2 dx dy,
(2)
T2
T2
проверка которого в рассматриваемом случае легко проводится с помощью разложения по ком-
плексным экспонентам ek,m(x, y). Отметим, что обзору современных результатов по точным
константам в неравенствах типа Пуанкаре посвящена работа [13].
В качестве допустимого множества функционала (1) будем использовать пространство
H1(T2). Такой выбор допустимого множества функционала невязки представляется достаточ-
но естественным для рассматриваемой задачи восстановления волнового фронта, поскольку,
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
997
во-первых, позволяет естественным образом вычислять его наклоны и, во-вторых, охватывает
широкий круг негладких поверхностей, в том числе разрывных (пример см. в [11, п. 9.4]).
Необходимое условие минимума функционала невязки (1) на
H1(T2) получается из равен-
ства нулю его первой вариации и приводит к интегральному тождеству
〈ux, φx〉 + 〈uy, φy〉 = 〈g1, φx〉 + 〈g2, φy〉 для любых функций φ ∈H1(T2),
(3)
которому должен удовлетворять искомый волновой фронт u(x, y) ∈H1(T2).
Теорема 1. Пусть g1, g2 ∈ L2(T2). Тогда вариационная задача (3) имеет единственное
решение u ∈H1(T2). Решение непрерывно зависит от вектора наклонов и справедлива оценка
√
∥u∥H1(T2) ≤
2∥g∥.
(4)
Доказательство. Задача (3) может быть записана в стандартном для вариационных за-
дач виде
a(u, φ) = ℓ(φ) для любой φ ∈H1(T2),
(5)
где введены обозначения для билинейной формы a(u, φ) = 〈ux, φx〉 + 〈uy, φy〉 и линейного
функционала ℓ(φ) = 〈g1, φx〉 + 〈g2, φy〉. Непрерывность билинейной формы и функционала
вытекает из оценок
|a(u, φ)| ≤ ∥ux∥∥φx∥ + ∥uy∥∥φy ∥ ≤ ∥u∥H1(T2)∥φ∥H1(T2),
|ℓ(φ)| ≤ ∥g∥∥φ∥H1(T2).
(6)
Свойство коэрцитивности билинейной формы следует из неравенства Пуанкаре (2) и записы-
вается в виде
(7)
a(u, u) ≥ 0.5∥u∥2H1 (T2)длявсехфункцийu∈H1(T2).
Тогда существование и единственность решения вариационной задачи (5) следует из непрерыв-
ности функционала, непрерывности и коэрцитивности билинейной формы и теоремы Лакса-
Мильграма (см., например, [14, с. 19; 15, с. 43]). Оценка (4) является следствием неравенства
(2) и вытекающей из (5) и неравенства Коши-Буняковского оценки ∥ux∥2 + ∥uy∥2 ≤ ∥g∥2.
Теорема доказана.
Исследуем гладкость решения вариационной задачи в зависимости от гладкости входных
данных g1, g2.
Теорема 2. Пусть g1 ∈ Hs,0(T2), g2 ∈ H0,s(T2), s ∈ (0, 1]. Тогда решение вариационной
H 1+s(T2)иимеетместооценка
задачи (3) принадлежит
∥u∥H1+s(T2) ≤ C(∥g1∥Hs,0(T2) + ∥g2∥H0,s(T2)).
(8)
∑
Доказательство. Рассмотрим разложение u =
ûn,men,m(x,y) полученного
(0,0)=(n,m)∈Z2
в теореме 1 решения задачи (3) (или, что то же самое, (5)). Возьмём в (5) пробную функцию
φ = e∗k,l. Несложные вычисления показывают, что a(u,e∗k,l) = (k2+l2)uk,l и ℓ(e∗k,l) = -i(kĝ1,k,l+
+ lĝ2,k,l), где
ĝj,k,l = 〈gj , ek,l〉 - коэффициенты разложения наклонов, j = 1, 2. Получаем
kĝ1,k,l +lĝ2,k,l
ûk,l = -i
,
(0, 0) = (k, l) ∈ Z2,
û0,0 = 0.
(9)
k2 + l2
Воспользуемся (9) и оценим норму
∑
(1 + k2(1+s) + l2(1+s))|ûk,l|2 ≤
∥u∥2H1+s(T2)=
(0,0)=(k,l)∈Z2
∑
(1 + k2(1+s) + l2(1+s))(k2|ĝ1,k,l|2 + l2|ĝ2,k,l|2)
≤2
(k2 + l2)2
(0,0)=(k,l)∈Z2
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
998
РАЗГУЛИН и др.
Заметим, что для всех индексов, по которым проводится суммирование, справедливо
(1 + k2(1+s) + l2(1+s))k2
(1 + k2(1+s) + l2(1+s))k2(1-s)
=
k2s ≤ 3k2s.
(k2 + l2)2
(k2 + l2)2
Аналогично получаем
(1 + k2(1+s) + l2(1+s))l2
≤ 3l2s.
(k2 + l2)2
С учётом этих оценок имеем
∑
∥u∥2H1+s(T2)≤C1
(k2s|ĝ1,k,l|2 + l2s|ĝ2,k,l|2) = C1(∥g1∥2Hs,0(T2)+∥g2∥H0,s(T2)).
(0,0)=(k,l)∈Z2
Отсюда вытекают включение u ∈H1+s(T2) и искомая оценка (9). Теорема доказана.
2. Проекционная схема аппроксимации вариационной задачи. Для построения ко-
нечномерной аппроксимации вариационной задачи (3) на основе проекционного метода возь-
мём натуральное чётное N, введём множество индексов
I = {-N/2,-N/2 + 1,...,N/2 - 1}
и рассмотрим подпространство
S1(T2) = Lin {φk,l(x,y)} ⊂ H1(T2)
размерности N × N кусочно-линейных по каждому направлению сплайнов, являющихся ли-
нейными комбинациями функций φk,l(x, y) = φk(x)φl(y), (k, l) ∈ I2, где φk(t) = max(0, 1 -
- |t - kh|h-1), k ∈ I\{-N/2}, φ-N/2(t) = φ1-N/2(t + h) + φ1-N/2(t + h - 2π), h = 2πN-1.
Обозначи
S1(T2) = S1(T2)
⋂ H1(T2). Представив далее аппроксимацию искомого волнового
∑
фронта в виде конечной суммы uh(x, y) =(k,l)∈I2 uhk,lφk,l(x, y)
S1(T2) и ограничившись в
тождестве (3) пробными функциями из подпространства
S1(T2), приходим к конечномерной
вариационной задаче
〈uhx, φx〉 + 〈uhy, φy〉 = 〈g1, φx〉 + 〈g2, φy〉 при всех φ
S1(T2).
(10)
Условие принадлежности решения uh пространству
S1(T2) накладывает условие равенства
нулю среднего значения сеточной функции
∑
uhk,l = 0.
(11)
(k,l)∈I2
Отметим, что поскольку в записи равенств (10) пробные функции φ
S1(T2) участвуют
только под знаком производных, то фактически можно расширить класс пробных функций
до всего пространства S1(T2). Тогда задача (10) допускает эквивалентную запись в виде опе-
раторного уравнения относительно матрицы искомых коэффициентов uh = {uhkl} (см. [10])
B2Λ1uh + B1Λ2uh = f, f = f1 + f2
(12)
с дополнительным условием (11), где
xk
∫
∫
f1k,l = h-3
φl(y)
(g1(x, y) - g1(x + h, y)) dx dy,
yl-1
xk-1
yl
∫
∫
f2k,l = h-3
φk(x)
(g2(x, y) - g2(x, y + h)) dx dy.
xk-1
yl-1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
999
Операторы Bj , Λj задаются с помощью матриц Грама (см. монографию [16, гл. 2, § 2])
в L2(-π,π) рассматриваемых одномерных сплайнов и их градиентов, Bj = Ej - h2Λj/6,
Ej - единичный оператор по соответствующему направлению, j = 1,2. Отметим особенность
записи слагаемых в уравнении (12): операторы с индексом j = 1 действуют по переменной x
(по строкам), операторы с индексом j = 2 действуют по переменной y (по столбцам). Таким
образом, например, запись B2Λ1 означает суперпозицию двух операторов, действующих по
разным переменным.
∑
Далее каждой функции uh(x, y) =(k,l)∈I2 uhk,lφk,l(x, y) из пространства сплайнов S1(T2)
сопоставим заданную на I2 сеточную функцию uh = {uhk,l}, составленную из коэффициентов
разложения по базисным сплайнам. Для сеточных функций будем использовать дискретное
скалярное произведение и соответствующую дискретную евклидову норму
√
∑
〈uh, vh〉h =
uhk,lvhk,lh2,
∥uh∥h =
〈uh, uh〉h.
(k,l)∈I2
Сеточные комплексные экспоненты
(
)
(
)
1
2πkj
1
2πml
ek(xj) =
√
exp i
,
em(yl) =
√
exp i
2π
N
2π
N
являются собственными функциями как операторов Λ1, Λ2 с собственными значениями
)
4
(kh
4
(mh)
λk =
sin2
,
λm =
sin2
,
k,m ∈ I,
(13)
h2
2
h2
2
так и операторов B1, B2 с собственными значениями
2
h
h2
μk = 1 -
λk, μm = 1 -
λm, k,m ∈ I.
6
6
Собственные значения допускают известные двусторонние оценки
4
0≤λk ≤
,
k ∈ I,
(14)
h2
1
≤ μk ≤ 1, k ∈ I.
(15)
3
Сеточные комплексные экспоненты ek,m(xj , yl) = ek(xj )em(yl) представляют собой ортонор-
мированный базис в пространстве сеточных функций на I2 : 〈ek,m, e∗p,q〉h = δk,mδp,q, где δk,m -
символ Кронекера. Любая заданная на I2 сеточная функция {zj,l} однозначно раскладыва-
ется в сумму
∑
zj,l =
zk,mek,m(xj , yl),
zk,m = 〈z, ek,m〉h.
(k,m)∈I2
Для функции uh(x, y) из пространства сплайно
S1(T2) и её сеточного варианта uh спра-
ведливо соотношение ∥uh∥2 = 〈uh, uh〉 = 〈B1B2uh, uh〉h, где B1B2 означает суперпозицию
двух операторов по соответствующим переменным. Отсюда в силу (15) вытекает эквивалент-
ность норм для функций и
S1(T2):
1
∥uh∥h ≤ ∥uh∥ ≤ ∥uh∥h.
(16)
3
Задачу (10) можно записать в аналогичном задаче (5) виде:
a(uh, vh) = ℓ(vh), uh
S1(T2) для любой функции vh
S1(T2).
(17)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
1000
РАЗГУЛИН и др.
Теорема 3. Пусть g1, g2 ∈ L2(T2). Тогда задача (17) имеет единственное решение uh ∈
∈
S1(T2) и справедлива оценка
√
∥uh∥H1(T2) ≤
2∥g∥.
(18)
Доказательство аналогично доказательству теоремы 1.
Следующие теоремы дают оценки скорости сходимости uh к функции u в различных
нормах и при различных требованиях к гладкости измеряемых наклонов g1, g2.
Теорема 4. Пусть g1 ∈ H1,0(T2), g2 ∈ H0,1(T2). Тогда имеют место оценки скорости
сходимости решения uh задачи (17) к решению u задачи (3):
∥uh - u∥H1(T2) ≤ C1h(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)),
(19)
∥uh - u∥ ≤ C2h2(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
(20)
Доказательство. В силу симметричности билинейной формы, оценок (6), (7) и замеча-
ния 2.3.1 к лемме Сеа [14, с. 109] имеем
√
∥uh - u∥H1(T2) ≤
2
inf
∥u - vh∥H1(T2).
vh
S1(T2)
Использовав аппроксимационные свойства тензорного произведения кусочно-линейных сплай-
нов [17, с. 37], приходим к оценке с независящей от решения u и шага сетки константой
C1 > 0:
∥uh - u∥H1(T2) ≤ C1h∥u∥H2(T2).
(21)
Воспользовавшись далее оценкой (8) из теоремы 2, окончательно получаем (19). При тех же
требованиях к гладкости наклонов для получения оценки в норме L2(T2) воспользуемся лем-
мой Обэна-Нитше (см., например, [14, с. 139]). Имеем
(
)
1
∥uh - u∥ ≤ M∥uh - u∥H2(T2) × sup
inf
∥φq - φh∥H1(T2) ,
(22)
q∈L2(T2)
∥q∥
φh
S1(T2)
где φq - единственное решение вариационной задачи
a(φq, v) = 〈q, v〉 для всех v ∈H1(T2).
(23)
Инфимум в (22) оценивается аналогично (21) и подобно доказательству оценки (8) теоремы 2
имеем
inf
∥φq - φh∥H1(T2) ≤ C1h∥φq∥H2(T2) ≤ C2h∥q∥.
(24)
φh
S1(T2)
Подставив полученную оценку в (22) с учётом неравенства (19), окончательно получаем (20).
Теорема доказана.
Исследуем сходимость метода в норме L2(T2) при негладких наклонах g1, g2 ∈ L2(T2).
Теорема 5. Пусть g1, g2 ∈ L2(T2). Тогда справедлива оценка скорости сходимости
∥uh - u∥ ≤ C3h∥g∥.
(25)
Доказательство. Обратимся снова к неравенству (22). Поскольку задача (23) не зави-
сит от наклонов g1, g2, то для оценки инфимума воспользуемся (24). В силу неравенства
треугольника и (4), (18) имеем
√
∥uh - u∥H1(T2) ≤ ∥uh∥H1(T2) + ∥u∥H1(T2) ≤ 2
2∥g∥.
Подставив полученные оценки в (22), приходим к (25). Теорема доказана.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
1001
3. Проекционная схема со стабилизатором дробной гладкости. Рассмотрим следу-
ющую модификацию схемы (5):
B2Λ1wh + B1Λ2wh + γ(Λ1Λ2)swh = f.
(26)
По сравнению с (5) схема (26) содержит зависящий от двух параметров γ > 0, s > 0 до-
полнительный стабилизатор γ(Λ1Λ2)swh. Это слагаемое отвечает за выравнивание частотной
характеристики метода в области средних частот и привносит в уравнение смешанные произ-
водные дробного порядка. Различные способы выбора параметров стабилизатора обсуждаются
в работе [10].
Действие стабилизатора реализуется в пространстве фурье-коэффициентов разложения по
комплексным экспонентам em,n в виде мультипликатора γ(λmλn)s, а для самих коэффици-
ентов
ŵhm,n разложения искомого решения задачи (26) имеет место формула
fm,n
ŵhm,n =
,
0 = (m,n) ∈ I2,
μnλm + μmλn + γ(λmλn)s
где
fm,n - коэффициенты Фурье правой части f. Из (14), (15) вытекает корректность вычис-
лений по формуле (26).
Далее потребуется вариационный аналог операторного уравнения (26):
as(wh,vh) = ℓ(vh), wh
S1(T2) при всех vh
S1(T2),
(27)
где отвечающая задаче (26) билинейная форма имеет вид
as(wh,vh) = 〈uhx,vhx〉 + 〈why,vhy〉 + γ〈B-11B-12(Λ1Λ2)suh,vh〉.
(28)
Отметим, что в формуле (28) в скалярном произведении в четвертом слагаемом использовано
обозначение для восполнения сеточной функции
∑
B-11B-12(Λ1Λ2)swh =
(B-11B-12(Λ1Λ2)swh)k,lφk,l(x, y)
S1(T2).
(k,l)∈I2
Теорема 6. Пусть g1, g2 ∈ L2(T2). Тогда задача (26) (задача (27)) имеет единственное
решение wh
S1(T2) и справедлива оценка
∥wh∥H1(T2) ≤ C1∥g∥.
(29)
Пусть g1 ∈ H1,0(T2), g2 ∈ H0,1(T2). Тогда справедлива оценка
∥Λj wh∥h ≤ C2(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)), j = 1, 2.
(30)
Доказательство проводится аналогично доказательству теоремы 1. Существование вы-
текает из (26), где знаменатель не обращается в нуль. Для вывода оценки (29) возьмём в (27)
vh = wh в качестве пробной функции. Имеем
a(wh, wh) + γ〈B-11B-12(Λ1Λ2)swh, wh〉 = ℓ(wh).
Перейдём к дискретным функциям во втором слагаемом левой части и получим
a(wh, wh) + γ〈(Λ1Λ2)swh, wh〉h = ℓ(wh).
Воспользовавшись далее коэрцитивностью билинейной формы a(wh, wh) (оценка (7)), непре-
рывностью функционала ℓ(wh) (оценка (6)), а также вытекающей из оценки (14) неотрица-
тельностью операторов Λ1, Λ2, приходим к неравенству (29).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
1002
РАЗГУЛИН и др.
Для доказательства оценки (30) воспользуемся (26), равенством Парсеваля и неравенства-
ми (15):
∑
∑
λ2m
fm,n|2
∥Λ1wh∥2h =
λ2m| ŵhm,n|2 =
≤
(μnλm + μmλn + γ(λmλn)s)2
(0,0)=(m,n)∈I2
(0,0)=(m,n)∈I2
∑
≤C1
fm,n|2 = C1∥f∥2h ≤ C2(∥g1∥2H1,0(T2)+∥g2∥H0,1(T2)).
(0,0)=(m,n)∈I2
Теорема доказана.
Исследуем близость решения wh к точному решению u задачи (3).
Теорема 7. Пусть g1, g2 ∈ L2(T2). Тогда справедлива оценка скорости сходимости
∥wh - u∥ ≤ (C3h + C4γλσ(s)N/2)∥g∥, σ(s) = max{2s - 3/2, 0}.
(31)
Пусть g1 ∈ H1,0(T2), g2 ∈ H0,1(T2). Тогда при 0.25 ≤ s справедлива оценка скорости сходи-
мости
∥wh - u∥H1(T2) ≤ (C5h + C6γλσ(s)N/2)(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
(32)
При 0 < s < 0.25 оценка имеет вид
∥wh - u∥H1(T2) ≤ C7h(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)) + C8γ∥g∥.
(33)
Также справедлива оценка
∥wh - u∥ ≤ (C9h2 + C10γλη(s)N/2)(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)), η(s) = max{2s - 2, 0}.
(34)
Доказательство. В силу неравенства треугольника имеем
∥wh - u∥ ≤ ∥wh - uh∥ + ∥uh - u∥,
∥wh - u∥H1(T2) ≤ ∥wh - uh∥H1(T2) + ∥uh - u∥H1(T2).
В правых частях этих неравенств нормы разности uh - u оцениваются с помощью (19), (20)
и (25). Осталось оценить нормы разности zh = wh - uh решения wh задачи (26) и решения
uh задачи (12). Вычитая почленно равенства (26) и (12), приходим к уравнению
B2Λ1zh + B1Λ2zh + γ(Λ1Λ2)swh = 0
(35)
или, в эквивалентной вариационной форме,
a(zh, vh) + γ〈B-11B-12(Λ1Λ2)swh, vh〉 = 0 при каждой vh
S1(T2).
Полагая vh = zh и используя коэрцитивность билинейной формы, в случае 0.25 ≤ s имеем
0.5∥zh∥2H1(T2)≤a(zh,zh)=-γ〈B11B21(Λ1Λ2)swh,zh〉=
= -γ〈(Λ1Λ2)swh,zh〉h = -γ〈(Λ1Λ2)s-1/4wh,(Λ1Λ2)1/4zh〉h ≤
≤ γ∥(Λ1Λ2)s-1/4wh∥h∥(Λ1Λ2)1/4zh∥h ≤ C1γ∥(Λ1Λ2)s-1/4wh∥h∥zh∥H1(T2).
Отсюда следуют неравенства
∥zh∥H1(T2) ≤ γC2∥(Λ1Λ2)s-1/4wh∥h ≤ γλσ(s)N/2C3∥(Λ1Λ2)1/2wh∥h.
C помощью оценки (30) имеем
∥(Λ1Λ2)1/2wh∥h ≤ C3(∥Λ1wh∥h + ∥Λ2wh∥h) ≤ C4(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
1003
Следовательно,
∥zh∥H1(T2) ≤ γλσ(s)N/2C5(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
В более простом случае 0 < s < 0.25 воспользуемся оценкой (29):
0.5∥zh∥2H1(T2)≤γC1∥wh∥h∥(Λ1Λ2)1/4zh∥h≤γC2∥wh∥H1(T2)∥zh∥H1(T2)≤γC3∥g∥∥zh∥H1(T2),
в результате получим
∥zh∥H1(T2) ≤ γC3∥g∥.
Применив далее оценку (19), приходим к (32) и (33).
Получим для zh оценки дискретной нормы L2. Из уравнения (35) вытекает выражение
для соответствующих коэффициентов Фурье
γ(λmλn)s ŵhm,n
zhm,n = -
μnλm + μmλn
√
Отсюда в случае s > 0.75 с использованием (14), (15) и неравенства (λmλn)1/2 ≤ (λm +λn)/
2
имеем
∑
∑
(λmλn)2s| ŵhm,n|2
∥zh∥2h =
|zhm,n|2 = γ2
≤
(μnλm + μmλn)2
(0,0)=(m,n)∈I2
(0,0)=(m,n)∈I2
∑
(λmλn)2s-1/2(μnλm + μmλn)| ŵhm,n
|2
≤C5γ2
∥g∥2.
≤C5γ2λ4s-3N/2∥wh∥2H1(T2)≤C6γ2λN
/2
(μnλm + μmλn)2
(0,0)=(m,n)∈I2
Тогда с учётом (16) получаем
∥zh∥ ≤ C7γλ2s-3/2N/2∥g∥.
При 0 < s ≤ 0.75 имеем (λmλn)2s ≤ C9(μnλm + μmλn)3 и оценка нормы принимает вид
∥zh∥ ≤ C9γ∥g∥.
Объединив полученные оценки с неравенством (25), заключаем, что при g ∈ L2(T2) справед-
ливо неравенство
∥wh - u∥ ≤ (C3h + C10γλσ(s)N/2)∥g∥.
Оценка (31) доказана.
При дополнительной гладкости наклонов g1 ∈ H1,0(T2), g2 ∈ H0,1(T2) воспользуемся
неравенством
(λmλn)2s ≤ C12λ2η(s)N/2(μnλm + μmλn)2(λm + λn)2, η(s) = max{2s - 2, 0}.
Тогда с учётом неравенств (30) имеем
∑
(λmλn)2s| ŵhm,n
|2
∥zh∥2h
=γ2
≤
(μnλm + μmλn)2
(0,0)=(m,n)∈I2
∑
≤C11γ2λ2η(s)N/2
(λm + λn)2| ŵhm,n|2 ≤ C12γ2λ2η(s)N/2(∥Λ1wh∥2h + ∥Λ2wh∥2h) ≤
(0,0)=(m,n)∈I2
≤ C13γ2λ2η(s)N/2(∥g1∥2H1,0(T2) + ∥g2∥H 0,1(T2)).
С помощью (20) получаем неравенство (34). Теорема доказана.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
1004
РАЗГУЛИН и др.
Обсудим согласование параметров в оценках теоремы 7. Полученные в теореме 7 оценки
показывают, что для сходимости проекционного метода выбор параметров γ и s необходимо
согласовывать с шагом сетки h в зависимости от гладкости наклонов и выбора нормы. Учтём,
что в силу (13) λN/2 = 4h-2. Тогда для случая g1, g2 ∈ L2(T2) при согласовании 0 < γ <
< C14h1+2σ(s) в силу (31) имеет место оценка
∥wh - u∥ ≤ C15h∥g∥.
(36)
Если же g1 ∈ H1,0(T2), g2 ∈ H0,1(T2), то при 0 < γ < C16h2+2η(s) в силу (34) справедлива
оценка скорости сходимости
∥wh - u∥ ≤ C17h2(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)),
(37)
а при 0 < γ < C18h1+2σ(s) в силу (32) имеем
∥wh - u∥H1(T2) ≤ C19h(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
(38)
Таким образом, при выполнении вычислительных экспериментов для наилучшего исполь-
зования свойства выравнивания частотной характеристики схемы при одновременном сохра-
нении точности вычислений параметр γ следует брать достаточно малым. Результаты вы-
числительных экспериментов подтверждают справедливость сделанных теоретических оценок
точности с согласованным выбором параметров.
4. Оценки скорости сходимости в пространствах дробной гладкости. В данном
пункте с помощью интерполяции оператора погрешности выведем оценки скорости сходимости
в анизотропных пространствах дробной гладкости. Введём необходимые обозначения. Пусть
X и Y - гильбертовы пространства со скалярными произведениями 〈·,·〉X,
〈·,·〉Y и соот-
ветствующими евклидовыми нормами ∥ · ∥X , ∥ · ∥Y , причём X вложено в Y, всюду плотно и
непрерывно. Из [11, п. 2.1] известно, что существует Λ = Λ∗ > 0 - некоторый, вообще говоря,
неограниченный оператор в Y с D(Λ) = X, причём норма в X эквивалентна норме графика
Λ. Следуя [11], для θ ∈ [0, 1] рассмотрим промежуточные пространства Лионса [X, Y ]θ =
= D(Λ1-θ) с нормой графика ∥u∥[X,Y]θ = (∥u∥2Y + ∥Λ1-θu∥2Y )1/2. Очевидно, что [X,Y ]0 = X,
[X, Y ]1 = Y, т.е. пространства [X, Y ]θ непрерывно соединяют крайние пространства X и Y.
В частности, аналогично [11, гл. 1, пп. 9 и 13] с использованием теоремы об интерполяции
пересечений пространств проверяется, что для θ ∈ [0, 1] справедливы равенства
[H1(T2), L2(T2)]θ = H1-θ(T2),
(39)
[H1,0(T2) × H0,1(T2), L2(T2) × L2(T2)]θ = H1-θ,0(T2) × H0,1-θ(T2).
(40)
Также потребуются интерполяционные пространства, построенные с помощью К-метода.
Рассмотрим функционалы
Kp(t,a;X,Y ) =
inf
(∥a0∥pX + tp∥a1∥pY )1/p, p ∈ {1, 2}.
a0+a1=a,a0∈X,a1∈Y
Согласно [18, п. 1.3.2] при θ ∈ (0, 1) определим интерполяционные пространства
{
∫
)1/2
}
(X, Y )θ,2 = a ∈ Y : ∥a∥(X,Y)θ,2 =
t-1-2θK21(t,a;X,Y )dt
< +∞ .
0
√
Поскольку K2 ≤ K1 ≤
2K2, то использование функционала K2 в предыдущем определении
даёт эквивалентную норму. Отсюда в силу [11, теорема 15.1] при каждом θ ∈ (0, 1) вытекает
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
1005
эквивалентность норм пространств [X, Y ]θ и (X, Y )θ,2. Однако равномерной по параметру θ
эквивалентности нет в силу полученного в упомянутой теореме равенства
∫
t-1-2θK22(t,a;X,Y )dt = C(θ)∥Λ1-θa∥2Y
(41)
0
с неограниченным при θ → 0 + 0, θ → 1 - 0 множителем
+∞
s1-2θ
π
C(θ) =
ds =
1+s2
2sin(πθ)
0
(см. также [19, с. 116]).
Если X и Y - другая пара пространств со свойствами, аналогичными свойствам пары X
и Y, то имеет место следующее утверждение (см., например, [18, теорема 1.3.3]).
Теорема 8. Пусть для двух пар пространств X, Y и X , Y задан линейный оператор
T ∈ L(X → X)
⋂ L(Y → Y). Тогда T ∈ L((X,Y )θ,2 → (X,Y)θ,2) и справедлива оценка
Mθ1, M0 = ∥T∥L(X→X), M1 = ∥T∥L(Y→Y).
(42)
∥T ∥L((X,Y)θ,2→(X ,Y)θ,2) ≤
0
Нам потребуется следствие из этой теоремы для промежуточных пространств Лионса. Для
любого a ∈ [X, Y ]θ в силу (42) имеем неравенство
∥T a∥(X,Y)θ,2 ≤ M1-θ0Mθ1∥a∥(X,Y)
(43)
θ,2
Поскольку при переходе от нормы пространства К-метода к норме пространства Лионса фи-
гурирующий в (41) множитель C(θ) входит в обе части неравенства (43), то после несложных
перенормировок получаем неравенство в пространствах Лионса с независящей от θ ∈ [0, 1]
константой C20 > 0:
∥T a∥[X,Y]θ ≤ C20M1-θ0Mθ1∥a∥[X,Y]
(44)
θ
Теорема 9. Пусть выполнено условие согласования параметров схемы и шага сетки 0 <
<γ <C21h1+2σ(s), 0 < h < 1. Тогда для любых α ∈ [0,1] справедливы следующие оценки:
∥wh - u∥Hα(T2) ≤ C22h(∥g1∥Hα,0(T2) + ∥g2∥H0,α(T2)),
(45)
∥wh - u∥L
(46)
2(T2) ≤C23h1+α(∥g1∥Hα,0(T2)+∥g2∥H0,α(T2)),
∥wh - u∥Hα(T2) ≤ C24h2-α(∥g1∥H1,0(T2) + ∥g2∥H0,1(T2)).
(47)
Доказательство. Рассмотрим оператор погрешности проекционной схемы
R : g = (g1,g2) → wh - u
на разных сочетаниях пар пространств, участвующих в оценках (36)-(38).
Начнём с оценок(36), (38). Имеем R ∈ L(L2(T2) × L2(T2) → L2(T2)) с операторной нормой
M1 ≤ C15h и R ∈ L(H1,0(T2) × H0,1(T2) → H1(T2)) с операторной нормой M0 ≤ C19h.
Применим неравенство (44), в котором в роли T выступает оператор погрешности R на парах
пространств Y = L2(T2)×L2(T2), Y = L2(T2) и X = H1,0(T2)×H0,1(T2), X = H1(T2). Тогда
с учётом соотношений (39), (40) неравенство (44) принимает вид
∥wh - u∥H1-θ(T2) ≤ C22h(∥g1∥H1-θ,0(T2) + ∥g2∥H0,1-θ(T2)).
Обозначив α = 1 - θ, получим (45).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
1006
РАЗГУЛИН и др.
Из рассмотрения оценок (36), (37) вытекает возможность применить для оператора по-
грешности R неравенство (44) на парах пространств Y = L2(T2) × L2(T2), Y = L2(T2) с
операторной нормой M1 ≤ C15h и X = H1,0(T2) × H0,1(T2), X = L2(T2) с операторной
нормой M0 ≤ C17h2. Положив θ = 1 - α, приходим к оценке (46).
Наконец, оценки (37), (38) позволяют рассмотреть оператор погрешности на парах про-
странств Y = H1,0(T2) × H0,1(T2), Y = L2(T2) с операторной нормой M1 ≤ C17h2 и X =
= H1,0(T2) × H0,1(T2), X = H1(T2) с операторной нормой M0 ≤ C19h. Положив θ = 1 - α и
применив (44), получим (47). Теорема доказана.
5. Пример восстановления негладкого волнового фронта по неточно заданным
наклонам. Качество восстановления негладкого волнового фронта продемонстрируем на при-
мере поверхности, задаваемой уравнением
u(x, y, n, κ) = u0 + exp{-(r/a)2M }U(x, y, n, κ),
U (x, y, n, κ) =
⎧
[κr + 2n(ϕ - π/2) + π/6]
⎪
⎨(κr + 2n(ϕ - π/2) + π/6) mod 2π,
если
нечётное;
2π
=
(48)
⎪
[κr + 2n(ϕ - π/2) + π/6]
⎩2π-(κr+2n(ϕ-π/2)+π/6)mod2π,если
чётное,
2π
√
где ϕ = argctg(y/x), r =
x2 + y2, n ∈ N, κ ∈ R,
[·] - целая часть числа. Функция из
(48) описывает многолепестковую (при κ = 0) и спиральную (при κ = 0) структуры с n
рукавами, при этом параметр κ отвечает за степень закрученности спирали. Такая функция
служит адекватной моделью для кусочно-гладких фазовых фронтов, встречающихся при ра-
боте датчиков Шака-Гартмана. Константа u0 выбирается из условия равенства нулю среднего
значения функции, 2π-периодичность рассматриваемой функции по переменным x, y обес-
печивалась приближённым равенством нулю самой функции и её производных при достаточно
большом M (в расчётах брались значения a = 0.7π, M = 4).
В приведённом примере для численного моделирования в качестве исходных данных бра-
лись дискретные значения точных наклонов волнового фронта (48), к которым далее добавлял-
ся 5 %-й гауссов шум для имитации искажений измерений наклонов на сетке 512 × 512. Далее
проводилось восполнение дискретных наклонов из пространства сплайнов S1(T2) и находи-
лась правая часть в (12), которая в этом случае выражается через разностные производные
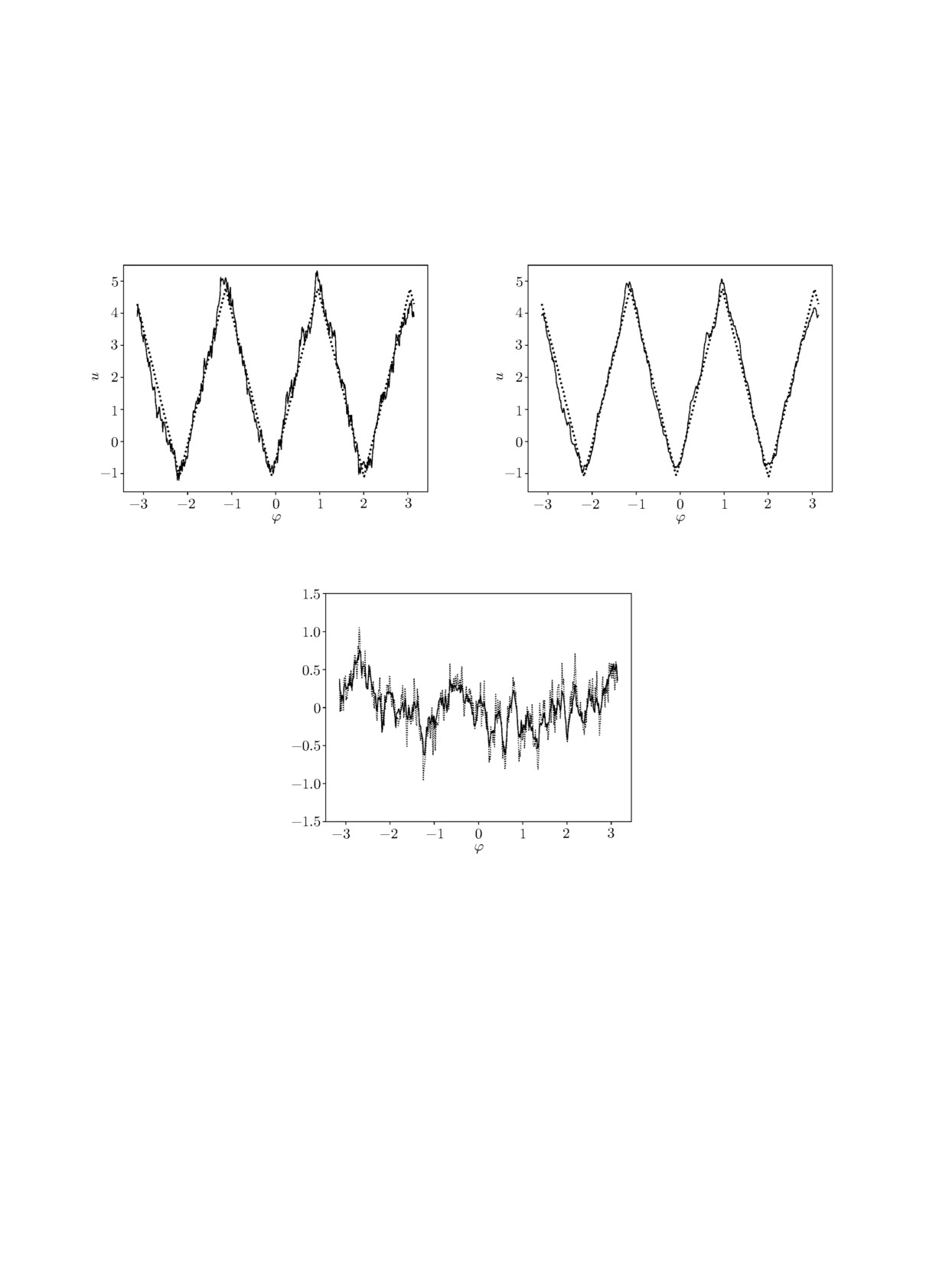
от дискретных наклонов (подробнее см. в [9]). Результаты вычислений на примере волнового
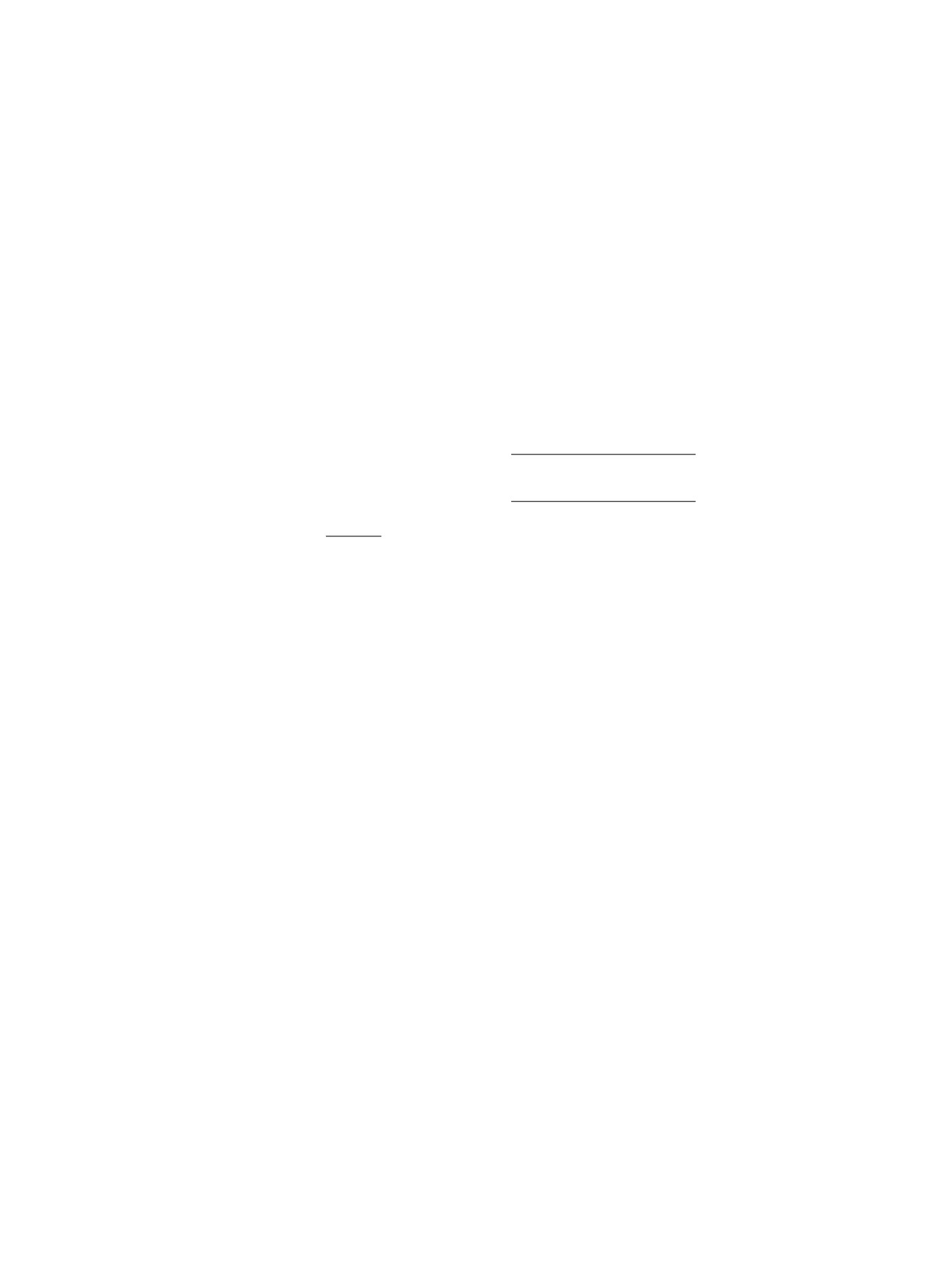
фронта (48) с параметрами κ = 2, n = 3 иллюстрируются на рис. 1, а для схемы без стабили-
затора (γ = 0) и на рис. 1, б для схемы со стабилизатором (γ = 0.03, s = 0.9) в виде сечений
волнового фронта окружностью r = π/2,
0 ≤ ϕ ≤ 2π. На рис. 2 приведены графики сече-
ний отклонений от искомого волнового фронта (48) полученного решения со стабилизатором и
без него. Сравнение показывает, что схема уверенно справляется с восстановлением кусочно-
гладких фаз. При этом линии разрывов производной точно локализуются и в областях вне раз-
рывов имеет место хорошее поточечное приближение. Как видно из графиков, использование
стабилизатора приводит к эффективному локальному сглаживанию паразитных искажений
волнового фронта, вызванных неточностью измерений наклонов.
Заключение. В работе рассмотрена проблема восстановления волнового фронта по его
наклонам, которая возникает в адаптивной оптике и связана с определением фазы световой
волны на основе датчика Шака-Гартмана. Вариационная постановка задачи приводит к урав-
нению Пуассона на подпространстве периодических функций с нулевым средним, при этом
свойство коэрцитивности задачи вытекает из неравенства Пуанкаре для таких функций. При
условии согласования шага сетки с параметрами стабилизатором дробного порядка получе-
ны оценки точности проекционного метода на основе билинейных сплайнов при естественных
требованиях к гладкости волнового фронта из анизотропных пространств Соболева с целыми
показателями гладкости. На основе выбора специальных анизотропных пространств с дробны-
ми показателями гладкости, составляющих непрерывную шкалу, соединяющую пространства
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
ОЦЕНКИ ТОЧНОСТИ ПРОЕКЦИОННОГО МЕТОДА
1007
с целыми показателями гладкости, и использования связанных с ними методов интерполя-
ции оператора погрешности проекционного метода получены шкалы оценок точности метода,
согласованные с дробной гладкостью наклонов. Теоретические оценки иллюстрируются ре-
зультатами численного эксперимента по эффективному восстановлению кусочно-негладких
спиральных волновых фронтов в условиях неточно заданных дискретных наклонов.
(а)
(б)
Рис. 1. Графики сечений при r = π/2 искомого фронта u(x, y, 3, 2) (пунктирная линия) и wh (сплошная
линия) без стабилизатора (а) и со стабилизатором (б).
Рис. 2. Графики сечений при r = π/2 отклоне-
ний wh от искомого фронта u(x, y,3, 2) без стаби-
лизатора (пунктирная линия) и со стабилизатором
(сплошная линия).
Работа выполнена при финансовой поддержке Российского фонда фундаментальных иссле-
дований (проект 18-29-02103) (А.В. Разгулин, Н.Г. Ирошников, А.В. Ларичев) и Министерства
образования и науки Российской Федерации в рамках реализации программы Московского
центра фундаментальной и прикладной математики (соглашение 075-15-2022-284) (А.В. Раз-
гулин, Т.Е. Романенко).
СПИСОК ЛИТЕРАТУРЫ
1. Platt B.C., Shack R. History and principles of Shack-Hartmann wavefront sensing // J. Refract. Surg.
2001. V. 17. № 5. P. S573-S577.
2. Andreeva M.S., Iroshnikov N.G., Koryabin A.B., Larichev A.V., Shmalgauzen V.I. Usage of wavefront
sensor for estimation of atmospheric turbulence parameters // Optoelectronics, Instrumentation and
Data Processing. 2012. V. 48. P. 197-204.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022
1008
РАЗГУЛИН и др.
3. Baryshnikov N.V., Denisov D.G., Dzhumamuratova A.A., Larichev A.V. Development and research of
an optoelectronic device based on a wavefront sensor to control the form parameters of intraocular lenses
// Measurement Techniques. 2019. V. 62. P. 31-35.
4. Goncharov A.S., Iroshnikov N.G., Larichev A.V., Nikolaev I.P. The impact of speckle on the measure-
ment of eye aberrations // J. of Modern Optics. 2015. V. 62. № 21. P. 1775-1780.
5. Bahk S.W. Highly accurate wavefront reconstruction algorithms over broad spatial-frequency bandwidth
// Optics Express. 2011. V. 19. № 20. P. 18997-19014.
6. Zhariy M., Neubauer A., Rosensteiner M., Ramlau R. Cumulative wavefront reconstructor for the Shack-
Hartmann sensor // Inverse Problems and Imaging. 2011. V. 5. № 4. P. 893-913.
7. Neubauer A. On the ill-posedness and convergence of the Shack-Hartmann based wavefront reconstruction
// J. of Inverse and Ill-posed Problems. 2010. V. 18. № 5. P. 551-576.
8. Kindermann S., Neubauer A., Ramlau R. A singular value decomposition for the Shack-Hartmann based
wavefront reconstruction // J. of Comput. and Appl. Math. 2012. V. 236. № 8. P. 2186-2199.
9. Razgulin A.V., Kuzhamaliyev Y.Z., Goncharov A.S., Larichev A.V. A variational method for wavefront
reconstruction from Shack-Hartman sensor measurements // Atmospheric and Oceanic Optics. 2017.
V. 30. № 4. P. 399-403.
10. Razgulin A.V., Kuzhamaliyev Y.Z., Iroshnikov N.G., Larichev A.V. A variational method of wavefront
reconstruction from local slope measurements using a fractional order of smoothness stabilizer // Comput.
Math. and Model. 2019. V. 30. № 2. P. 164-176.
11. Лионс Ж.-Л., Мадженес Э. Неоднородные граничные задачи и их приложения. М., 1971.
12. Adams R., Fournier J. Sobolev Spaces. Pure and Applied Mathematics. V. 140. Amsterdam, 2003.
13. Kuznetsov N., Nazarov A. Sharp constants in the Poincare, Steklov and related inequalities (a survey)
// Mathematika. 2015. V. 61. № 2. P. 328-344.
14. Сьярле Ф. Метод конечных элементов для эллиптических задач. М., 1980.
15. Обэн Ж.-П. Приближенное решение эллиптических краевых задач. М., 1977.
16. Марчук Г.И., Агошков В.И. Введение в проекционно-сеточные методы. М., 1981.
17. Варга Р. Функциональный анализ и теория аппроксимации в численном анализе. М., 1974.
18. Трибель Х. Теория интерполяции, функциональные пространства, дифференциальные операторы.
М., 1980.
19. Tartar L. An introduction to Sobolev spaces and interpolation spaces. Berlin; Heidelberg, 2007.
Московский государственный университет
Поступила в редакцию 18.02.2022 г.
имени М.В. Ломоносова,
После доработки 18.02.2022 г.
ООО “ВК Цифровые технологии”,
Принята к публикации 25.05.2022 г.
г. Москва
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 58
№7
2022