ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ, 2023, том 59, № 12, с. 1692-1701
ТЕОРИЯ УПРАВЛЕНИЯ
УДК 517.977
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
С НАИЛУЧШЕЙ ЛОКАЛЬНОЙ УПРАВЛЯЕМОСТЬЮ
© 2023 г. М. А. Велищанский, В. Н. Четвериков
Исследуется задача оптимального выбора параметров модели относительно какого-ли-
бо функционала. Рассматриваются локально управляемые аффинные системы и инте-
гральные функционалы, зависящие от программного управления. Доказывается локальная
управляемость аффинных систем с неотрицательными входами в случае, когда столбцы
при управлениях образуют положительный базис. Для таких систем вводится коэффи-
циент локальной управляемости и ставится задача его максимизации в зависимости от
выбора параметров модели. В качестве примера рассматривается очень упрощённая мо-
дель подводного аппарата и исследуется задача такого расположения его управляющих
винтомоторных агрегатов, при котором энергопотребление аппарата минимально.
DOI: 10.31857/S0374064123120099, EDN: NWKEBC
Введение. В настоящее время существует множество видов автономных необитаемых под-
водных аппаратов, отличающихся размерами, формой, областью применения, видами и рас-
положением управляющих агрегатов и т.д. Задача выбора аппарата, оптимального в том или
ином смысле, решается, как правило, из механических или технических соображений. Напри-
мер, в работах [1, 2] задача снижения энергопотребления подводного аппарата решалась с
использованием обтекаемой конструкции корпуса и разрабатываемой в этих работах системы
управления солнечной энергией и энергией подводного аппарата.
Хорошо известно [3, с. 48], что движение подводного аппарата описывает динамическая
система управления с параметрами. Выбор параметров определяет, в частности, вид и рас-
положение управляющих агрегатов подводного аппарата. Энергия, потребляемая аппаратом,
равна интегральному функционалу, зависящему от управления системы. Задача поиска мо-
дели подводного аппарата с минимальным потреблением энергии формулируется на матема-
тическом языке как задача поиска параметров системы, при которых указанный функцио-
нал минимален. Аналогичные задачи формулируются для летательных аппаратов и наземных
транспортных средств, а также для других функционалов, например, характеризующих время
движения. Задача сравнения однотипных роботов по тому или иному критерию с использова-
нием математических методов актуальна ввиду бурного развития робототехники в настоящее
время.
Отметим, что рассматриваемая в работе задача близка задаче оптимального управления
по какому-либо критерию. Например, задачи оптимального управления по критерию быстро-
действия решались для перехвата движущейся по предписанной траектории цели машиной
Дубинса [4, 5] и для системы, состоящей из двух несинхронных осцилляторов [6].
Цель данной статьи - попытаться разработать математические методы для сравнения од-
нотипных моделей по тому или иному критерию. Мы не используем методы теории оптималь-
ного управления ввиду сложности их применения к данной задаче. Наш подход основан на
предположении, что в малой окрестности каждого допустимого состояния любая траектория
системы возможна и равновероятна. Из этого следует, в частности, локальная управляемость
системы. Кроме того, локальную траекторию системы можно считать случайной величиной.
Тогда значение функционала также есть случайная величина, а поставленную задачу можно
понимать как задачу минимизации математического ожидания значения функционала. Коэф-
фициент локальной управляемости системы относительно заданного функционала, определя-
емый нами как величина обратно пропорциональная указанному математическому ожиданию,
мы предлагаем использовать для сравнения систем с разными значениями параметров.
1692
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
1693
Для упрощения определений и вычислений далее будем рассматривать только аффинные
системы с неотрицательными входами. Локальная управляемость таких систем исследуется с
использованием понятия положительного базиса, введённого в работах [7, 8]. Докажем простой
метод проверки положительного базиса, а также достаточное условие локальной управляемо-
сти систем указанного типа.
В качестве иллюстрации рассмотрен пример движения в вертикальной плоскости подвод-
ного аппарата, управляемого винтомоторными агрегатами (ВМА). Предполагаем, что тяга
каждого ВМА может быть направлена только в одну сторону. Показано, что такое движение
описывает аффинная система с неотрицательными управлениями, параметрами которой явля-
ются количество ВМА и их расположение. Доказано, что данная система локально управляе-
ма только в случае четырёх и более ВМА, расположенных определённым образом. В качестве
функционала, используемого для сравнения систем с разным расположением ВМА, мы рас-
сматриваем потребляемую энергию двигателями аппарата. Коэффициент локальной управля-
емости системы относительно этого функционала вычислен для разных значений параметров.
Найдены несколько точек локального максимума и соответствующие значения функционала
на четырёх выбранных траекториях.
Статья организована следующим образом. В п. 1 ставится задача и формулируется пример.
Определения локально управляемой системы и положительного базиса, а также факты о них
содержатся в п. 2. Алгоритм управления системами с положительным базисом формулируется
в п. 3. В п. 4 определяется коэффициент управляемости и вычисляется для рассматриваемого
примера, сравниваются системы с разными значениями параметров.
1. Постановка задачи. Рассмотрим систему
x = f(x,u,α), x ∈ X ⊂ Rn, u ∈ U ⊂ Rm, α ∈ Rk,
(1)
где x = (x1, . . . , xn) - состояние системы, u = (u1, . . . , um) - её управления, X - область
допустимых состояний, U - область допустимых управлений, α = (α1,... ,αk) - набор па-
раметров, а x ≡ dx/dt.
Пусть для системы (1) ставится задача выбора таких параметров α, для которых мини-
мален следующий функционал. Рассмотрим гладкую неотрицательную при x ∈ X и u ∈ U
функцию Φ(x, u) и отображение, которое каждому решению (x(t), u(t)) системы (1) ставит в
соответствие интеграл по промежутку [0, T ] функции Φ(x(t), u(t)). Упомянутый функционал
равен максимальному по решениям системы (1) значению этого отображения, т.е.
т
∫
max
Φ(x(t), u(t)) dt.
(2)
(x(t),u(t))
0
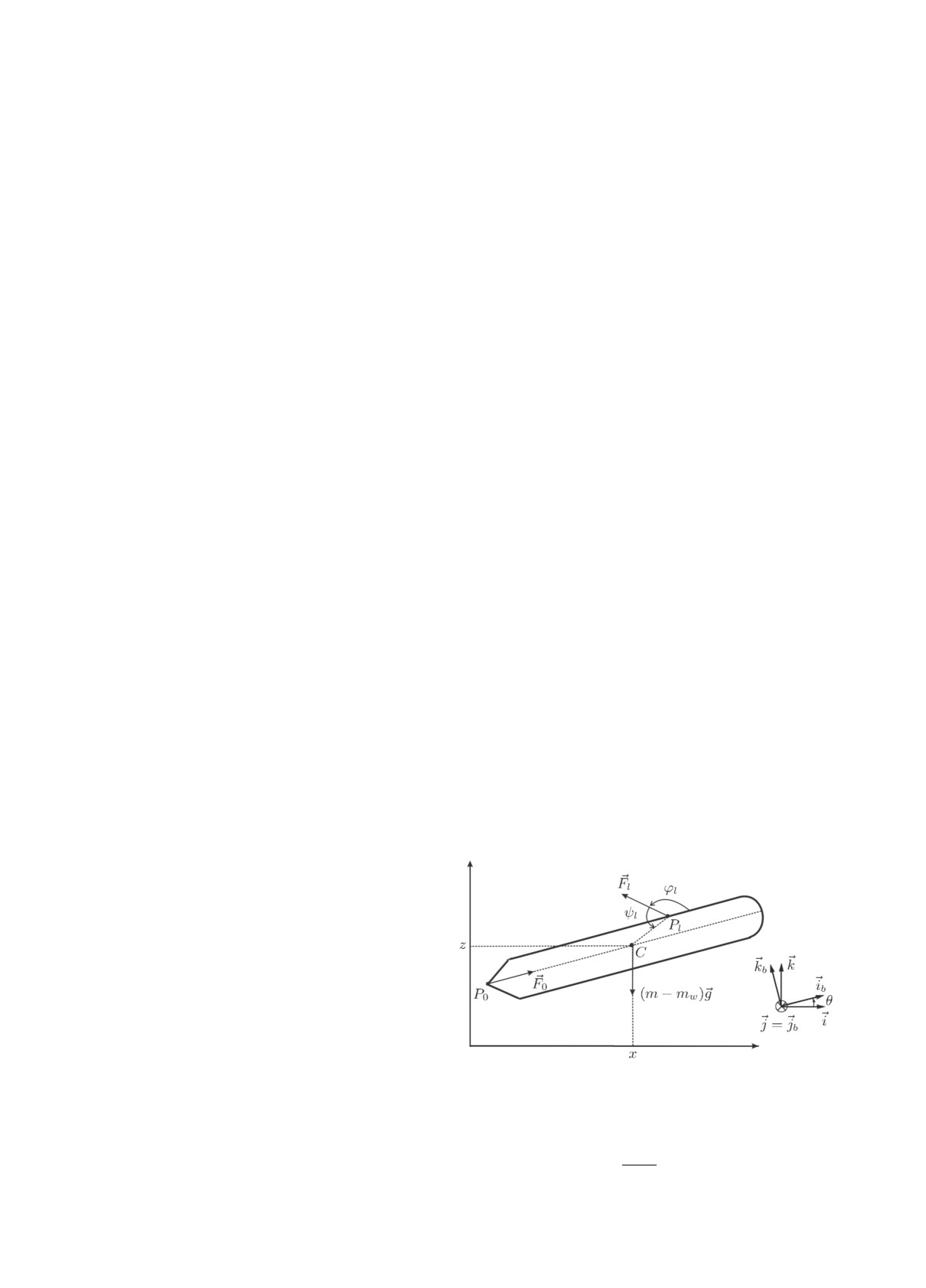
Пример 1. Рассмотрим упрощённую
модель подводного аппарата, эволюция ко-
торого ограничена в вертикальной плоско-
сти (рисунок). Пусть (i,⃗j,k) - ортонорми-
рованный базис неподвижной системы ко-
ординат, а (ib,⃗jb,kb) - ортонормированный
базис подвижной системы координат, при-
креплённой к подводному аппарату. Обо-
значим через θ угол между этими систе-
мами координат. Аппарат имеет один более
мощный винтовой двигатель (с номером 0)
для движения вперед и lm винтовых двига-
телей малой мощности для разворота. Обо-
Рисунок. Упрощённая модель подводного аппарата.
значим через P0, P1, . . . , Plm точки рас-
положения винтов.
На подводный аппарат действуют силы
F0 = F0ib,
Fl = Fl(cos φl
⃗ib + sin φl kb), l = 1,lm,
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
1694
ВЕЛИЩАНСКИЙ, ЧЕТВЕРИКОВ
(m - mw)g = -(m - mw)gk,
где m - масса подводного аппарата; mw - масса воды, вытесненной подводным аппаратом;
--→
φl - угол междуib и
Fl, ψl - угол между
Fl и
PlC. Вес mg и выталкивающая сила -mwg
прикладываются к центру масс C; сила
Fl прикладывается к точке Pl, l = 0, lm, где
--→
--→
CPl = -|CPl|(cos(ψl + φl)⃗ib + sin(ψl + φl)kb).
Уравнения движения, записанные в терминах центра масс C, имеют вид
∑
∑
⃗
--→
mvC = (m - mw)g +
Fl,
LC =
CPl
Fl,
l=0
l=0
где vC - скорость,
LC - угловой момент относительно C. Спроецировав эти уравнения на
неподвижные оси, получим
(
)
∑
∑
x = cosθ u0 + ul cosφl
- sin θ
ul sin φl,
l=1
l=1
(
)
∑
∑
∑
z = sinθ u0 +
ul cos φl
+ cos θ ul sin φl - κg,
θ = κlul sinψl,
(3)
l=1
l=1
l=1
где
--→
F0
m-mw
Fl
m|CPl|
u0 =
,
κ=
,
ul =
,
κl =
,
l = 1,lm,
m
m
m
J
J - момент инерции подводного аппарата относительно оси Oy. Так как тяга каждого ВМА
может быть направлена только в одну сторону, то ul ≥ 0, l = 0, lm.
--→
Параметрами данной системы являются lm, φl, ψl,
|CPl|, т.е. количество винтов и их
расположение. В качестве функции Φ(x, u), определяющей функционал (2), возьмём функцию
∑lm
Φ =
ui. Тогда функционал пропорционален потребляемой энергии всеми двигателями
i=0
аппарата.
2. Условия локальной управляемости. Рассмотрим систему
x = f(x,u), x ∈ X ⊂ Rn, u ∈ U ⊂ Rm.
(4)
Напомним, что состояние xf ∈ D ⊂ X называют достижимым из состояния x0 ∈ D ⊂ X в
области D, если существует решение (x(t), u(t)), t ∈ [t0, tf ], системы (4), удовлетворяющее
условиям
x(t0) = x0, x(tf ) = xf ,
x(t) ∈ D, u(t) ∈ U при t ∈ [t0, tf ].
(5)
Систему (4) называют управляемой в области D ⊂ X , если любое состояние xf ∈ D
достижимо из любого состояния x0 ∈ D в области D.
Пример 2. Запишем систему (3) как
∑
∑
u0 + ul cos φl = cos θ x + sin θ (z + κg),
ul sin φl = - sin θ x + cos θ (z + κg),
l=1
l=1
∑
κlul sin ψl =θ.
(6)
l=1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
1695
Система (6) имеет вид
∑
ulal(x) = ζ(x, x,... , x(s)),
x∈X0 ⊂Rn,
u = (u0,...,ulm)т ∈ U, ul ≥ 0, l = 0,lm.
(7)
l=0
А именно, для системы (6) n = 3, s = 2,
x = (x,z,θ)т, a0, ..., alm - столбцы высоты 3,
зависящие только от параметров системы.
Для системы (7) обозначим через M матрицу, состоящую из столбцов a0, a1, . . . , alm .
Если rang M = n, то для любой векторной функции x(t) ∈ D ⊂ X0, t ∈ [t0, tf ], существует
векторная функция u(t) = (u0(t), . . . , ulm (t))т, удовлетворяющая вместе с x(t) системе (7).
Если при этом u(t) ∈ U и ul(t) ≥ 0 для t ∈ [t0, tf ] и l = 0, lm, то пара векторных функций
(x, u(t)) удовлетворяет всем условиям (7).
Областью достижимости состояния xf ∈ X за время T > 0 в области D ⊂ X будем
называть множество таких состояний x0 ∈ X , что существует решение (x(t), u(t)), t ∈ [t0, tf ],
системы (4), удовлетворяющее условиям (5) при tf - t0 < T.
Систему (4) будем называть локально управляемой в точке xf ∈ X , если для любого T > 0
область достижимости состояния xf за время T в области X содержит окрестность точки
xf (см. [8]). Система (4) локально управляема в области X, если она локально управляема в
любой точке x0 ∈ X .
Замечание. В определении локальной управляемости рассматриваются траектории сис-
темы, которые начинаются в произвольной точке x0 ∈ X и заканчиваются в заданной точке
xf , а не наоборот. Такой выбор объясняется тем, что в начальный момент, как правило, опре-
делены значения u, а в конечный момент мы можем считать компоненты u произвольными.
Существуют системы, которые управляемы, но не локально управляемы.
Пример 3. Рассмотрим подводный аппарат с тремя винтами, т.е. lm = 2. Пусть винты
расположены так, что φ1 = π/2, ψ1 = 0, φ2 = 3π/4, ψ2 = π/2. Третье уравнения системы (3)
имеет видθ = κ2u2. Поскольку u2 ≥ 0, то угол θ может только расти, т.е. аппарат может
поворачиваться только против часовой стрелки. Чтобы повернуть аппарат на угол θ0 > 0 по
часовой стрелке, необходимо повернуть его на угол 2π -θ0 против часовой стрелки. Если угол
θ0 мал, то угол 2π-θ0 не является малым, и сколь угодно уменьшать время движения нельзя,
потому что u2 ограничено сверху. Таким образом, система не локально управляема, хотя
управляема, если нет ограничения на время движения. Например, при движении из начального
состояния в конечное достаточно сначала развернуть аппарат, а потом двигаться по прямой.
Для формулировки условий локальной управляемости в случае ul ≥ 0, l = 0, lm, нам пона-
добятся следующие понятия и результаты из работ [7, 8]. Говорят, что векторы a1, . . . , am ∈ RN
составляют положительный базис пространства RN , если для каждого a ∈ RN найдутся та-
кие неотрицательные числа λ1, . . . , λm, что a = λ1a1 + . . . + λmam.
Сформулируем некоторые свойства положительного базиса, доказанные в [7, 8].
Свойство 1. Всегда существует положительный базис размерности N +1, т.е. m = N +1.
Свойство 2. Для любого положительного базиса имеем m ≥ N + 1.
Свойство 3. Пусть векторы a1, . . . , am ∈ RN составляют положительный базис. Тогда
найдутся такие положительные числа λ1, . . . , λm, что λ1a1 + . . . + λmam = 0.
Свойство 4. Среди векторов, составляющих положительный базис, найдётся N линейно-
независимых, а значит, образующих обычный базис пространства RN .
Учитывая свойство 1 положительного базиса, далее мы будем рассматривать только случай
m = N + 1. Докажем для этого случая ещё два свойства и теорему, дающую простой метод
проверки положительного базиса.
Свойство 5. В случае m = N + 1 любые N векторов положительного базиса образуют
обычный базис пространства RN .
Доказательство. Из соображений размерности вытекает, что если N векторов простран-
ства RN линейно независимы, то они образуют обычный базис этого пространства. Предпо-
ложим существование такого положительного базиса a0, a1, . . . , aN пространства RN , что
векторы a1, . . . , aN линейно зависимы. Из свойства 4 положительного базиса следует, что
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
1696
ВЕЛИЩАНСКИЙ, ЧЕТВЕРИКОВ
среди векторов a0, a1, . . . , aN найдётся обычный базис пространства RN . Этот базис содер-
жит вектор a0, пусть он состоит из векторов a0, a1, . . . , aN-1. Тогда векторы a1, . . . , aN-1
линейно независимы. Из линейной зависимости векторов a1, . . . , aN следует, что вектор aN
линейно выражается через векторы a1, . . . , aN-1. Из определения положительного базиса
следует представление
-a0 = λ0a0 + λ1a1 + ... + λNaN ,
где λi ≥ 0, i = 0, N . Заменим в этом равенстве вектор aN на линейную комбинацию векторов
a1, ..., aN-1 и получим представление
-a0 = λ0a0 + λ′1a1 + ... + λ′N-1aN-1
с другими коэффициентами λ′1, . . . , λ′N-1, но с тем же λ0. Так как векторы a0, a1, . . . , aN-1
образуют обычный базис пространства RN , то из полученного представления следует, что
λ0 = -1, λ′1 = 0, ..., λ′N-1 = 0. Возникает противоречие с условием λ0 ≥ 0. Поэтому векторы
a1, ..., aN не могут быть линейно зависимыми, а значит, они также образуют обычный базис
пространства RN . Свойство доказано.
Свойство 6. В случае m = N + 1 векторы a1, . . . , am ∈ RN составляют положительный
базис тогда и только тогда, когда найдутся такие положительные числа α2, . . . , αm, что
a1 + α2a2 + ... + αmam = 0, причём числа α2, ..., αm определяются однозначно.
Доказательство. Из свойства 3 положительного базиса находим такие положительные
числа λ1, . . . , λm, что λ1a1 + . . . + λmam = 0. Из свойства 5 следует линейная независимость
векторов a2, . . . , am ∈ RN , а значит, λ1 = 0 и при αi = λi/λ1, i = 2, m, получаем равенство
из свойства 6. Набор чисел α2, . . . , αm единственен, так как векторы a2, . . . , am линейно
независимы.
Рассмотрим какой-либо набор векторов a0, a1, . . . , an ∈ Rn и матрицу M размерности n ×
× (n + 1), столбцы которой состоят из координат этих векторов. Минор, полученный из M
удалением i-го столбца, обозначим через Mi.
Теорема 1. Набор векторов a0, a1, . . . , an ∈ Rn образует положительный базис прост-
ранства Rn тогда и только тогда, когда M0 = 0, а (-1)iMi/M0 > 0 для i = 1, n.
Доказательство. Рассмотрим (n + 1) × (n + 1)-матрицу, первая строка которой есть j-я
строка матрицы M для некоторого j = 1, n, а остальная часть совпадает с матрицей M. По-
лучим вырожденную матрицу. Разложив её определитель по первой строке, получим a0j M0 -
- a1jM1 + ... + (-1)nanjMn = 0, где aij - j-я координата вектора ai. Так как значение j
произвольно, то получаем соотношение
M0a0 - M1a1 + ... + (-1)nMnan = 0.
(8)
Пусть векторы a0, a1, . . . , an составляют положительный базис. Из свойства 6 следует,
что M0 = 0. Поэтому a0+λ1a1+. . .+λnan = 0, где λi = (-1)iMi/M0, причём это единственное
такое соотношение на векторы a0, a1, . . . , an ввиду линейной независимости векторов a1,
..., an. Из свойства 6 следует, что (-1)iMi/M0 > 0, i = 1,n. Обратное утверждение также
следует из свойства 6 и соотношения (8). Теорема доказана.
Отметим, что разложение a = α0a0 + . . . + αnan вектора a по положительному базису
a0, ..., an неоднозначное, но всегда существует разложение, для которого хотя бы одно αi
нулевое, а остальные неотрицательные. Для построения такого разложения достаточно найти
какое-либо соотношение λ1a1 + . . . + λmam = 0 из свойства 3 и получить разложение
a = (α0 - λ0αl0/λl0)a0 + ... + (αn - λnαl0/λl0)an,
где αl0 /λl0 - минимальное из чисел αl/λl, l = 0, n. Тогда коэффициент при al0 нулевой, а
остальные неотрицательные. Назовём такое разложение вектора по положительному базису
минимальным. Ввиду свойства 5 оно единственно.
Теорема 2. Пусть для системы (7) с lm = n столбцы a0, . . . , an ∈ Rn в точке xf ∈ X0
образуют положительный базис пространства Rn, коэффициенты u0, ... , un минималь-
ного разложения вектора ζ(xf,0,... ,0) по этому базису составляют допустимое управ-
ление, функция ζ непрерывна в точке (xf,0,...,0), а компоненты столбцов a0, ..., an
непрерывны в окрестности xf. Тогда система (7) локально управляема в точке xf.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
1697
Доказательство. Если векторы a0(xf ), . . . , alm (xf ) ∈ Rn образуют положительный базис
пространства Rn, то в силу теоремы 1 и непрерывности функций ai(x) это свойство выпол-
няется и в некоторой окрестности U точки xf . Докажем непрерывность в точке (xf , 0, . . . , 0)
отображения F, которое отображает точку (x, ˙x, . . . , x(s)) в набор коэффициентов u0, . . . , un
минимального разложения вектора ζ(x, ˙x, . . . , x(s)) по положительному базису a0(x),
...,an(x),
x ∈ U. Область определения этого отображение есть объединение множеств Xi,
i = 0,n, где Xj состоит из точек, для которых uj = 0. Обозначим через Ai(x) квадратную
матрицу, составленную из всех столбцов a0(x), . . . , an(x), кроме ai(x). Ввиду теоремы 1
матрицы Ai(x), i = 0, n,
x ∈ U, невырождены. Так как каждая такая матрица состоит из
непрерывных функций, то обратные им матрицы также состоят из непрерывных функций.
Ограничение отображения F на Xj есть Aj (x)-1ζ(x, ˙x, . . . , x(s)) и поэтому непрерывно в
точке (xf , 0, . . . , 0), если эта точка лежит в Xj. Точка (xf,0,...,0) может быть граничной
точкой нескольких множеств Xj , но в силу единственности минимального разложения значе-
ние F (xf , 0, . . . , 0) не зависит от выбора Xj , а значит, отображение F непрерывно в точке
(xf,0,...,0).
По условию теоремы точка F (xf , 0, . . . , 0) принадлежит области допустимых управле-
ний U. Поэтому существует окрестность V точки (xf,0,...,0), образ которой при отоб-
ражении F лежит в U. Выберем такие положительные числа δ1 и δ2, что декартово произ-
ведение δ1-окрестности точки xf и δ2-окрестности точки (0, . . . , 0) лежит в V, т.е. Uδ1 (xf ) ×
× Uδ2(0,...,0) ⊂ V.
Пусть ξ - произвольный единичный вектор, β(t) - какая-либо s раз непрерывно диффе-
ренцируемая, убывающая на отрезке [0, T ] функция, β(T ) = 0,
R = max ∥( β(t),...,β(s)(t))∥.
t∈[0,T ]
Рассмотрим траекторию
x(t) = xf + (δ2/R)β(t)ξ. Тогда x(T ) = xf , и за счёт выбора ξ и
t в качестве x(t) мы можем получить произвольную точку из δ-окрестности Uδ(xf ) точки
(xf,0,...,0), где δ = min(δ1,δ2β(0)/R). Поэтому окрестность Uδ(xf) лежит в области дости-
жимости состояния xf за время T > 0 в Uδ(xf ), а значит, система (7) локально управляема
в точке xf . Теорема доказана.
Пример 4. Из свойства 2 положительного базиса следует, что случай, описанный в теоре-
ме 2, возможен только при lm ≥ 3. Исследуем случай, когда в (3) lm = 2. Запишем систему (3)
в матричном виде x = TθM u - B0, где
⎛
⎞
⎛
⎞
⎛
⎞
⎛
⎞
cos θ
- sin θ
0
1
cos φ1
cos φ2
u1
0
Tθ =⎝sin θ cos θ
0⎠, M = ⎝0
sin φ1
sin φ2
⎠,
u=⎝u2⎠, B0 = ⎝κζ⎠.
0
0
1
0
κ1 sin ψ1 κ2 sin ψ2
u3
0
Рассмотрим функцию h(t, x) = C( x + tB0), где C - некоторая постоянная строка. Произ-
водная функции h в силу системы (3) равна˙h = CTθM u. Пусть θf - θ-координата состояния
xf. Если матрица M невырождена, то, положив C = (1 1 1)M-1T-1, где M-1 - обратная кθ
f
M матрица, получим равенство
h=(111)M-1Tθ-θ
Mu = u1 + u2 + u3 + α(θ - θf),
f
где α(θ - θf ) → 0 при θ → θf . Поэтому если u1 + u2 + u3 ≡ 0, то
h(t, x) > 0 в некото-
рой окрестности точки xf (напомним, что ul ≥ 0 для любого l). Следовательно, значение
функции h в окрестности точки xf может только расти, а значит, состояния
x, для кото-
рых h(t, x) > h(t, xf ), не входят в область достижимости состояния
xf за малое время и
система (3) не является локально управляемой в точке xf .
Если u1 + u2 + u3 ≡ 0, то ui ≡ 0, i = 1, 2, 3, и область достижимости состояния xf есть
кривая (не является открытым множеством), и система (3) не является локально управляемой
в точке xf и в этом случае.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
1698
ВЕЛИЩАНСКИЙ, ЧЕТВЕРИКОВ
Если матрица M вырождена, то существует такая строка C0, что C0M = 0. Рассмотрим
функцию h(t, x) = C0T-1θ(x + tB), где θf - θ-координата состояния
xf , а B - некоторый
f
h
постоянный столбец. Производная функции h в силу системы (3) равна
= C0Tθ-θfM u +
+C0T-1θ
(B - B0), где первое слагаемое бесконечно малое при θ → θf , а второе слагаемое
f
можно сделать положительным за счёт выбора столбца B. При таком выборе B значение
функции h в окрестности точки xf может только расти, а значит, система (3) не является
локально управляемой в точке xf .
Таким образом, мы доказали, что система (3) может быть локально управляема только в
случае lm ≥ 3.
3. Алгоритм управления системами с положительным базисом. Далее покажем
как построить управления для движения по заданной траектории системы с положительным
базисом. Рассмотрим систему (7) в случае lm = n. Пусть поставлена задача выбора таких
входов u(t), чтобы система двигалась по траектории x(t), t ∈ [t0, tf ], при этом u(t0) задано.
Шаг 1. Проверяем, что векторы a0, . . . , an ∈ Rn составляют положительный базис. Для
этого находим такие положительные числа λ0, . . . , λn, что λ0a0 +. . .+λnan = 0. Обозначаем
через ld какой-либо номер от 0 до n, а через B - набор, состоящий из всех векторов al, кроме
l = ld. (Из свойства 5 следует, что B образует обычный базис пространства RN.) Определяем
K - количество шагов для перехода от начальной точки в конечную и шаг Δ = (tf - t0)/K.
Полагаем t = t0.
Шаг 2. Если u(t) ∈ U, то делаем вывод, что движение по заданной траектории при за-
данных ограничениях на управления невозможно и поэтому завершаем вычисления. Иначе
переходим на шаг 3.
Шаг 3. Если t = tf , то переходим на шаг 6. Иначе вычисляем
t := t + Δ, ζ(t) = ζ(x(t), x(t), . . . , x(s)(t)).
Шаг 4. Раскладываем вектор ζ(t) по базису B :
∑
ζ(t) =
vlal, vld = 0.
l=ld
Шаг 5. Если все полученные vl неотрицательны, то полагаем ul(t) = vl, l = 0, n, а затем
переходим на шаг 2. Иначе находим минимальное из чисел vl/λl, соответствующий номер
обозначаем через l0 (отметим, что vl0 < 0) и получаем разложение
(
)
∑
∑
∑
vl0
vl0
ζ(t) =
vlal -
λlal =
vl -
λl al.
λ
l0
λl0
l=ld
l=0
l=l0
Заменяем в B вектор al0 на вектор ald и полагаем, что
λl
ul(t) = vl -
vl0 , l = 0,n,
λl0
и ld = l0. Затем переходим на шаг 2.
Шаг 6. Завершаем вычисления и получаем ul(t), l = 0, n, t ∈ [t0, tf ].
4. Коэффициент локальной управляемости и задача его максимизации. Предпо-
ложим, что система (1) приведена к виду (7) и выбран функционал (2). Определим коэффици-
ент локальной управляемости, соответствующий этому функционалу. Для управления систе-
мой (7) будем использовать алгоритм, приведённый выше. Так как мы не обладаем какой-либо
информацией о возможных значениях правой части системы (7) (векторной функции ζ), бу-
дем считать, что любое достаточно малое значение ζ возможно и равновероятно. Понимая
ζ как случайный вектор, равномерно распределённый на шаре радиуса δ, рассмотрим ма-
тематическое ожидание M[Φ(xf , u)] случайной величины Φ(xf , u), где xf - фиксированная
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
1699
точка, а компоненты u есть коэффициенты разложения ζ по базису B, составленному из
части векторов a0, . . . , an (см. шаги 4 и 5 алгоритма). Коэффициент локальной управляемо-
сти системы (7) в состоянии xf относительно функционала (2) определим как величину,
обратную к пределу
1
k(xf ) = lim
M [Φ(xf , u)],
δ→0 δ
т.е. 1/k(xf ). Коэффициентом локальной управляемости системы (7) относительно функци-
онала (2) будем называть точную нижнюю грань коэффициентов локальной управляемости
системы (7) в её допустимых состояниях. Задача поиска параметров модели с наилучшей
управляемостью сводится к нахождению максимума по всем параметрам модели коэффици-
ента локальной управляемости системы, т.е. к поиску min sup k(xf ).
α xf
Выведем формулу для k(x). Отметим, что на каждом шаге алгоритма по крайней мере од-
на компонента u равна нулю. Обозначим через νi вложение пространства Rn в пространство
Rn+1, которое точку с координатами v = (v1,... ,vn) отображает в точку u = (u0,... ,un),
где uj = vj+1 при j < i, ui = 0, uj = vj при j > i. Пусть Ai - квадратная матрица, полу-
ченная из M удалением i-го столбца. Тогда если ζ раскладывается по базису, полученному
из набора a0, . . . , an удалением ai, то
ζ = Mνi(v) = Aiv.
Обозначим также через Vn(δ) объём n-мерного шара радиуса δ, а через Biδ - часть шара
радиуса δ, состоящую из точек ζ = Aiv. Тогда
∫
∑
1
M [Φ(xf , u)] =
Φ(xf , νi(A-1iζ)) dζ.
Vn(δ)
i=0
Bi
δ
В каждом интеграле, сделав замену ζ = δAiv, получим
∫
∑
|Mi|
M [Φ(xf , u)] =
Φ(xf , δνi(v)) dv,
Vn(1)
i=0
Gi
где Mi = det Ai, а Gi = {v = (v1, . . . , vn) ∈ Rn : ∥Aiv∥ ≤ 1, vj ≥ 0, j = 1, n}.
Пример 5. Рассмотрим подводный аппарат цилиндрической формы с закругленными кон-
цами, причём точки P1, . . . , Plm расположены на цилиндрической поверхности. В этом случае
--→
|CPl| = d/|sin(ψl + φl)|, где d - радиус цилиндрической поверхности аппарата. Из условия
локальной управляемости следует, что lm ≥ 3. Рассмотрим случай lm = 3.
Для упрощения рассуждений разделим последнее уравнение системы (6) на
-J/(md).
Матрица M коэффициентов при управлениях полученной системы (см. теорему 1) имеет вид
⎞
⎛1
cos φ1
cos φ2
cos φ3
⎜
⎟
⎜0
sin φ1
sin φ2
sin φ3
⎟
M =
⎜
⎟
⎝
sin ψ1
sin ψ2
sin ψ3
⎠
0
|sin(ψ1 + φ1)|
|sin(ψ2 + φ2)|
|sin(ψ3 + φ3)|
Отметим, что коэффициенты этой матрицы не зависят от x, а значит, коэффициент локальной
управляемости системы во всех состояниях одинаковый. Кроме того, n = 3, поэтому Vn(1) =
= 4π/3 и
∫
∑
3|Mi|
k(xf ) =
(v1 + v2 + v3) dv.
4π
i=0
Gi
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
1700
ВЕЛИЩАНСКИЙ, ЧЕТВЕРИКОВ
Таким образом, задача поиска параметров модели с наилучшей управляемостью сводится
к нахождению минимума k = k(xf ) по φ1, ψ1, φ2, ψ2, φ3, ψ3, где φj ∈ [0, 2π], ψj ∈ [0, 2π],
j = 1,2,3.
Указанная экстремальная задача решалась численно. При этом для исключения деления на
малые величины были добавлены следующие ограничения на значения параметров: |tg (ψj +
+φj)| ≥ 0.2, j = 1,2,3, и |Mi| > 0.1, i = 0,1,2,3. Оказалось, что функция k(φi,ψi) имеет
большое количество точек локального минимума. Соответствующие значения коэффициента k
указаны в таблице.
Системы с полученными значениями параметров были протестированы на следующих че-
тырёх траекториях:
1) поворот
(
)
t3
t2
π
x(t) = 0, z(t) = 0, θ(t) = θf
2
-3
,
t ∈ [0,T], θf =
,
T = 2с;
T3
T2
4
2) движение по синусоиде вниз
)
(πt
2πt
1
x(t) = 2 sin
,
z(t) = -
,
θ(t) = arcsin
√
,
t ∈ [0,T], T = 18с;
T
T
cos2(πt/T ) + 1
3) движение по горизонтальной синусоиде
)
40πt
( 20πt
( 20πt)
x(t) =
,
z(t) = 2 sin
,
θ(t) = arctg cos
,
t ∈ [0,T], T = 350с;
T
T
T
4) движение по эллипсу
)
( 2πt
( 2πt)
(1
( 2πt))
x(t)=20 cos
,
z(t)=10 sin
,
θ(t)=arctg
ctg
,
t∈[0,T], T =210с.
T
T
2
T
Соответствующие значения функционала приведены в таблице.
∑3
Таблица. Значения функционала
ui
i=0
Траектория
Параметры φ1, φ2, φ3, ψ1, ψ2, ψ3
k
1)
2)
3)
4)
2.06, 2.16, 4.28, 1.84, 4.33, 2.70
4.68
5.51
61.23
1124.93
115.49
1.15, 1.12, 3.67, 1.79, 4.27, 3.19
7.41
11.64
40.82
1528.06
243.45
2.11, 1.97, 4.28, 1.23, 4.11, 6.26
4.50
5.49
59.51
1114.02
114.14
2.06, 4.17, 4.17, 0, 5.06, 1.92
4.48
5.44
67.26
1105.61
112.94
1.87, 2.35, 4.23, 2.05, 4.13, 2.83
4.86
5.54
58.03
1109.14
113.69
2.11, 2.11, 4.23, 1.23, 4.37, 3.14
4.44
5.53
62.32
1132.80
116.62
2.09, 2.09, 4.19, 1.22, 4.37, 0
4.37
5.47
61.61
1121.26
115.05
1.74, 4.06, 4.14, 0.27, 5.16, 1.89
4.64
6.42
54.70
1186.55
130.13
1.57, 3.14, 4.19, 3.14, 1.57, 4.71
7.87
5.73
47.84
1011.71
119.65
Заключение. В работе рассмотрены локально управляемые системы с положительны-
ми управлениями, введены системы, названные системами с положительным базисом. Для
таких систем доказано достаточное условие локальной управляемости, сформулирован алго-
ритм построения управления для движения по заданной траектории и определён коэффициент
локальной управляемости.
Введённые понятия были исследованы для системы, описывающей движение подводного
аппарата в вертикальной плоскости. Рассмотрен случай, когда аппарат управляется только
винтомоторными агрегатами, винты которых вращаются только в одну сторону. Показано,
что движение такого аппарата описывает система с положительным базисом. Она локально
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023
ПОИСК ПАРАМЕТРОВ МОДЕЛИ
1701
управляема, только если винтомоторных агрегатов не менее четырёх. Задача минимизации по-
требляемой энергии двигателями аппарата эквивалентна задаче максимизации коэффициента
управляемости для соответствующего функционала. Численные расчёты показали, что дан-
ный коэффициент имеет большое количество точек локального максимума. Значения функ-
ционала для некоторых наборов параметров на четырёх выбранных траекториях показали
(см. таблицу), что при движении по конкретной траектории модель с меньшим значением ко-
эффициента управляемости (с большим значением k) может быть более эффективной. Мы
объясняем это тем, что определение коэффициента управляемости основано на вероятност-
ных понятиях, и поэтому эффективность модели с максимальным значением коэффициента
управляемости должна сказаться при движении на продолжительных и разнообразных тра-
екториях.
Отметим также, что в работе рассмотрен только случай, когда сдвиг из любого состояния
в любом направлении возможен и равновероятен. Однако в реальной ситуации вероятность
сдвига в каком-либо направлении зависит от решаемой аппаратом задачи. По нашему мнению,
закон распределения вероятности сдвига в направлении может быть определён при дополни-
тельном исследовании траекторий аппарата с использованием искусственного интеллекта. При
этом изменение закона распределения приведёт к изменению зависимости коэффициента ло-
кальной управляемости от параметров и к другим оптимальным значениям параметров.
Работа выполнена при поддержке программы “Приоритет 2030” МГТУ им. Н.Э. Баумана.
СПИСОК ЛИТЕРАТУРЫ
1. Amory A., Maehle E. SEMBIO-a small energy-efficient swarm AUV // OCEANS 2016 MTS/IEEE
Monterey. Monterey, 2016. P. 1-7.
2. Amory A., Maehle E. Energy efficiency of the swarm-capable micro AUV SEMBIO // OCEANS 2019
Marseille. Marseille, 2019. P. 1-7.
3. Fossen T.I. Guidance and Control of Ocean Vehicles. Chichester, 1994.
4. Buzikov M.E., Galyaev A.A. Time-optimal interception of a moving target by a Dubins car // Automation
and Remote Control. 2021. V. 82. № 5. P. 745-758.
5. Buzikov M.E., Galyaev A.A. Minimum-time lateral interception of a moving target by a Dubins car
// Automatica. 2022. V. 135. Art. 109968.
6. Berlin L., Galyaev A., Lysenko P. Time-optimal control problem of two non-synchronous oscillators
// Mathematics. 2022. V. 10. Art. 3552.
7. Петров Н.Н. Об управляемости автономных систем // Дифференц. уравнения. 1968. Т. 4. № 4.
С. 606-617.
8. Петров Н.Н. Локальная управляемость автономных систем // Дифференц. уравнения. 1968. Т. 4.
№ 7. С. 1218-1232.
Московский государственный технический
Поступила в редакцию 15.06.2023 г.
университет имени Н.Э. Баумана
После доработки 07.10.2023 г.
Принята к публикации 11.10.2023 г.
8
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ том 59
№ 12
2023