ВВЕДЕНИЕ
Широкое распространение беспилотных летательных аппаратов ставит новые задачи перед традиционной радиолокацией. Требуется не только обнаруживать летательные аппараты, что само по себе является непростой задачей ввиду их малого размера и легкости использования, но и отличать их от объектов живой природы, в частности, от птиц. Это требует уже наличия функции радиовидения в зондирующих системах, что в настоящее время является большой редкостью. Предложены различные методы построения радиоизображения, однако критическим параметром для всех схем является разрешение по дальности, которым в большой мере и определяется качество получаемой картинки. В то же время увеличение разрешения по дальности требует расширения полосы частот зондирующего сигнала. Так, для сантиметрового разрешения по дальности ширина полосы частот должна быть не меньше 5–8 ГГц. Это накладывает жесткие ограничения не только на параметры приемной системы, но и на подсистемы аналого-цифрового преобразования сигнала и его цифровой обработки. Задача еще больше усложняется в распределенной радиолокационной системе с совместной когерентной обработкой выходных сигналов различных приемников. Традиционные установки, реализованные на электронных компонентах, мало приспособлены для работы с такими сигналами. Широкие перспективы в этом случае открывает применение радиофотонных технологий в приемных устройствах, в частности, аналоговых радиофотонных процессоров для быстрой обработки больших объемов входных данных.
Мировая тенденция развития аналоговых радиофотонных (электрооптических) процессоров базируется на концепции нелинейно-фильтрующего радиофотонного звена [1]. В этом случае в каждом звене возможна реализация как аналоговой линейной обработки (фильтрации) широкополосного входного СВЧ сигнала по заданному алгоритму, так и его нелинейная обработка – ограничение, генерация суммарных и разностных частот и др. Специализированные аналоговые радиофотонные процессоры обычно содержат всего несколько радиофотонных звеньев и могут применяться для выполнения определенных задач. Такие устройства позволяют значительно увеличить быстродействие и дают возможность создать интегрально-оптическую реализацию системы с существенно уменьшенными массой и габаритами, что чрезвычайно важно, например, при реализации распределенного зондирующего комплекса с мобильными приемными системами, располагающимися на беспилотных летательных аппаратах. Первые радиофотонные программируемые процессоры для выполнения определенных операций уже реализованы в лабораторных условиях [2–4] и в ближайшее время могут поступить в производство.
Нами предложена схема специализированного аналогового процессора, реализующего радиофотонный корреляционный приемник в виде оптимального фильтра для обработки сверхширокополосного СВЧ сигнала. Численно исследовано функционирование такого фильтра и найдены его характеристики (точность определения положения максимума выходного сигнала, потенциальное быстродействие).
СХЕМА РАДИОФОТОННОГО ОПТИМАЛЬНОГО ФИЛЬТРА
Специализированный аналоговый процессор, реализующий радиофотонный корреляционный приемник для обработки сверхширокополосного входного СВЧ сигнала, удобнее всего построить в виде оптимального фильтра. В этом случае необходимо наблюдать за выходным сигналом фильтра, и в момент превышения этим сигналом определенного порога принимается решение об обнаружении цели. Время прихода сигнала (дальность до цели) рассчитывается по времени достижения максимального значения выходным сигналом фильтра. Радиофотонный оптимальный фильтр может быть реализован по схеме параллельного (поперечного) фильтра [1, 5–7]. Здесь входной сигнал разделяется на несколько каналов, в каждом канале вводится определенная задержка сигнала, а также осуществляется изменение его амплитуды (взвешивание), после этого выходные сигналы со всех каналов складываются. Преимуществом такой схемы для коротких сигналов является относительно небольшое число требуемых каналов. Вместе с тем параллельная схема обеспечивает минимальное время обработки входного сигнала фильтра, которое может быть порядка двух длительностей сигнала. Последовательные фильтры требуют намного более длительных времен обработки.
Согласно теории обнаружения известного сигнала в принимаемой смеси сигнала и шума [8], решение об обнаружении может основываться на значении следующей величины (достаточной статистики):
где s(t) – обнаруживаемый сигнал, $x\left( t \right) = s\left( t \right) + n\left( t \right)$ – принимаемая смесь сигнала и шума $~n\left( t \right)$, который предполагается белым, ${{t}_{k}}~$ – $n$ равноотстоящих моментов времени в интервале наблюдения T. Величина ${{G}_{n}}$ формируется на выходе оптимального фильтра в момент времени $t = T$ [9, 10].Для решения задач фильтрации сигналов в радиофотонике широко используются параллельные фильтры. Такой фильтр имеет конечную импульсную характеристику, и для него выходной сигнал $r\left( n \right)$ является взвешенной суммой М задержанных копий входного сигнала $s\left( n \right)$ [1]:
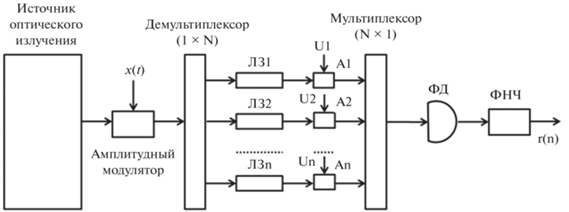
где ${{A}_{m}}$ – вес сигнала m-ой линии задержки параллельного фильтра, $\tau $ – шаг временной задержки. Коэффициенты ${{A}_{m}}$ могут в общем случае быть положительными, отрицательными и комплексными в зависимости от типа фильтра. Сравнивая выражения (1) и (2), можно сделать вывод, что параллельный фильтр способен сформировать сигнал, соответствующий сигналу на выходе оптимального фильтра (1), если длины линий задержки и коэффициенты ${{A}_{m}}$ выбраны в соответствии с моментами ${{t}_{k}}$ и значениями сигнала $s\left( {{{t}_{k}}} \right).$Возможная схема радиофотонного параллельного оптимального фильтра для приемной системы радара приведена на рис. 1. Лазерный источник может содержать непрерывный лазер, генератор оптической гребенки частот или набор разночастотных лазеров. В случае набора лазеров с разными частотами не происходит оптической интерференции выходных полей из разных каналов фильтра, что увеличивает стабильность его работы. Для одного непрерывного лазера все задержки в оптимальном фильтре должны быть кратны оптическому периоду, обеспечение этого может потребовать существенного усложнения схемы. Для генератора оптической гребенки частот могут появляться интерференционные члены, что, возможно, потребует дополнительной фильтрации выходного сигнала оптимального фильтра. Входной сигнал $x\left( t \right)$ (см. (1)) подается на оптический амплитудный модулятор для преобразования СВЧ сигнала в оптический диапазон. Требуемый частотный коэффициент передачи оптимального фильтра определяется характеристиками излучаемого импульса $s\left( t \right)$ [5]. По нему рассчитываются длины линий задержки, максимальная длина которых ограничена длительностью импульса, и весовые коэффициенты фильтра, которые передаются затем на оптические аттенюаторы. Схема, показанная на рис. 1, позволяет использовать только положительные весовые коэффициенты, что требует положительных значений сигнала в моменты ${{t}_{k}}.$ Набор весовых коэффициентов может храниться в памяти приемной системы для каждого типа излучаемого импульса и передаваться на фильтр непосредственно в процессе работы при необходимости смены типа импульса. Если используется всего один тип излучаемого импульса, то весовые коэффициенты могут быть аппаратно фиксированы.
Рис. 1.
Схема радиофотонного параллельного оптимального фильтра: ЛЗ – линии задержки, А – управляемые оптические аттенюаторы, ФД – фотодетектор, ФНЧ – фильтр низких частот. В случае использования непрерывного лазера мультиплексор может быть заменен сумматором, демультиплексор – делителем.
Для численного моделирования характеристик оптимального фильтра была разработана математическая модель, основанная на динамических уравнениях для элементов, используемых в схеме (лазер, модулятор, фотодетектор, фильтр, делители), а также определены источники шумов, включающие дробовой шум, тепловые шумы схемы, амплитудный и частотный шумы лазерного источника, темновой шум фотодетектора, и их параметры [11]. С помощью программного комплекса МАТЛАБ был разработан и отлажен численный код для проведения моделирований. Моделирования проводились для различных входных широкополосных сигналов – сигнала прямоугольного вида (для тестовых целей и как аналога видеосигналов), а также радиосигналов с огибающей треугольной формы частотой 10 ГГц с длительностью 0.6 и 3 нс.
ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ПРЯМОУГОЛЬНОГО СИГНАЛА
Для определения свойств радиофотонного оптимального фильтра были проведены тестовые моделирования фильтрации прямоугольного сигнала. В этом случае аналитическое решение точно известно (прямоугольный сигнал на входе оптимального фильтра преобразуется в треугольный сигнал на его выходе), а вид выходного сигнала наглядный и допускает очевидную интерпретацию. Сигнал на выходе радиофотонного оптимального фильтра с 9 линиями задержки при подаче на его вход импульса прямоугольной формы длительностью 3 нс представлен на рис. 2а и 2б (постоянный уровень определяется параметрами схемы и известен). Для случая одинаковой разности длин соседних линий задержки (0.33 нс, рис. 2а) выходной сигнал имеет ступенчатую симметричную форму (количество ступеней равно количеству линий задержки), при этом его вершина совпадает по времени с окончанием входного импульса, что позволяет определить время прихода сигнала (в данном случае правая граница верхней ступени располагается в точке 6.5 нс, прямоугольный импульс начинается в момент времени 3.5 нс и заканчивается при 6.5 нс). На рис. 2б разница в длинах между 2 и 3 линиями задержки увеличена и составляет порядка 1.5 нс. В результате форма выходного сигнала значительно искажается и становится несимметричной. В то же время правая граница верхней ступени остается в том же положении, что доказывает возможность использования параллельных фильтров с неравномерным расположением точек вычисления весовых коэффициентов (с изменяющейся разностью длин соседних линий задержки). Такое свойство существенно упрощает определение подходящего расположения этих точек (т.е. длин линий задержки и весовых коэффициентов) для знакопеременного импульса.
Рис. 2.
Сигнал на выходе радиофотонного оптимального фильтра при подаче на вход импульса прямоугольной формы длительностью 3 нс: 9 линий задержки, одинаковая разность длин соседних линий (0.33 нс) (а); 9 линий задержки, разница в длинах между 2 и 3 линиями задержки составляет порядка 1.5 нс (б); 5 линий задержки, одинаковая разность длин соседних линий (в); собственные шумы оптимального фильтра (увеличенный вид верхней части сигнала, 9 линий задержки) (г). Входной импульс заканчивается в момент времени 6.5 нс.
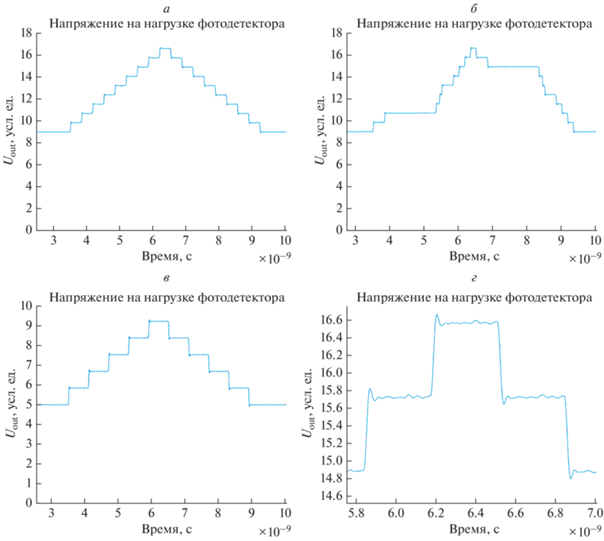
Сигнал на выходе радиофотонного оптимального фильтра с 5 линиями задержки представлен на рис. 2в. Здесь ступени уширены по сравнению с фильтром с 9 линиями задержки (рис. 2а). Точность измерения времени прихода принимаемого сигнала в радиофотонном оптимальном фильтре (рис. 1) определяется в случае прямоугольного импульса шириной ступеньки выходного сигнала (при умеренных шумах). Действительно, решение об обнаружении сигнала принимается, когда амплитуда сигнала на выходе оптимального фильтра превышает определенный порог. В присутствии входных шумов такое превышение может иметь место в любой точке верхней ступени, т.е. ошибка измерения времени прихода равна половине ширины верхней ступени. Оказывается, что, изменяя разность длин соседних линий задержки определенным образом, можно существенно сузить верхнюю ступень и повысить точность измерения времени прихода сигнала (ср. ширину верхней ступени на рис. 2а и 2б).
На рис. 2г представлена вершина выходного сигнала оптимального фильтра в увеличенном виде в отсутствие шумов входного сигнала. На горизонтальных участках видны собственные шумы радиофотонного оптимального приемника. Они определяются параметрами элементов фильтра (лазер, фотодетектор). Параллельный фильтр базируется на оптической передающей линии, поэтому их шумовые характеристики оказываются схожими. В результате радиофотонный оптимальный фильтр может обеспечить отношение сигнал/шум на уровне 40–60 дБ для сигналов с шириной полосы в несколько гигагерц. Вверху левых и внизу правых границ ступеней на рис. 2г видны выбросы, связанные с работой фильтра низких частот на выходе фотодетектора (рис. 1). Этот фильтр подавляет оптические частоты, пропуская выходной сигнал оптимального фильтра. В реальных системах подавление обычно осуществляется фотодетектором.
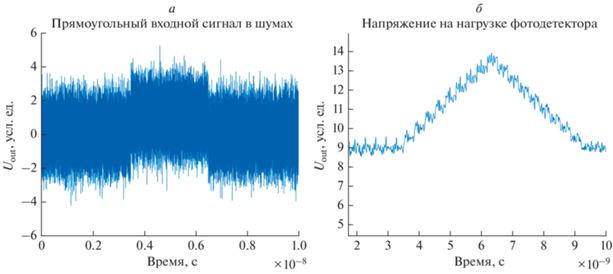
Входной и выходной сигналы оптимального фильтра в присутствии сильных входных шумов (квадрат амплитуды сигнала порядка дисперсии шума) представлены на рис. 3а и 3б. Очевидно хорошее фильтрующее действие оптимального фильтра, обеспечивающего обнаружение входного сигнала даже при таких сильных шумах. Правая граница верхней ступени по-прежнему совпадает с окончанием прямоугольного импульса, но максимальное значение выходного сигнала достигается в середине верхней ступени вследствие сильных шумов.
ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ТРЕУГОЛЬНЫХ СИГНАЛОВ РАЗЛИЧНОЙ ДЛИТЕЛЬНОСТИ
Фильтрация аддитивной смеси сигнала и шума оптимальным фильтром с 9 линиями задержки для входного сверхширокополосного радиоимпульса частотой 10 ГГц и длительностью 0.6 нс с огибающей треугольной формы представлена на рис. 4. Исходный импульс показан на рис. 4а, входной и выходной сигналы фильтра – на рис. 4б и 4в соответственно (положение входного импульса в шумах на рис. 4б отмечено красным эллипсом, характеристики шума аналогичны случаю на рис. 3б). Здесь опять фильтрующая способность радиофотонного приемника достаточно высокая, дисперсия шумовой дорожки на выходе оказывается намного меньше максимальной амплитуды импульса, при этом, как и ранее, максимум выходного сигнала фильтра совпадает с окончанием входного радиосигнала.
Рис. 4.
Излучаемый сигнал (а, г), а также входной (б, д) и выходной (в, е) сигналы оптимального фильтра с 9 линиями задержки для импульса с огибающей треугольной формы частотой 10 ГГц и длительностью 0.6 (а–в) и 3 нс (г–е). Положение входного сигнала в шумах отмечено красным эллипсом.
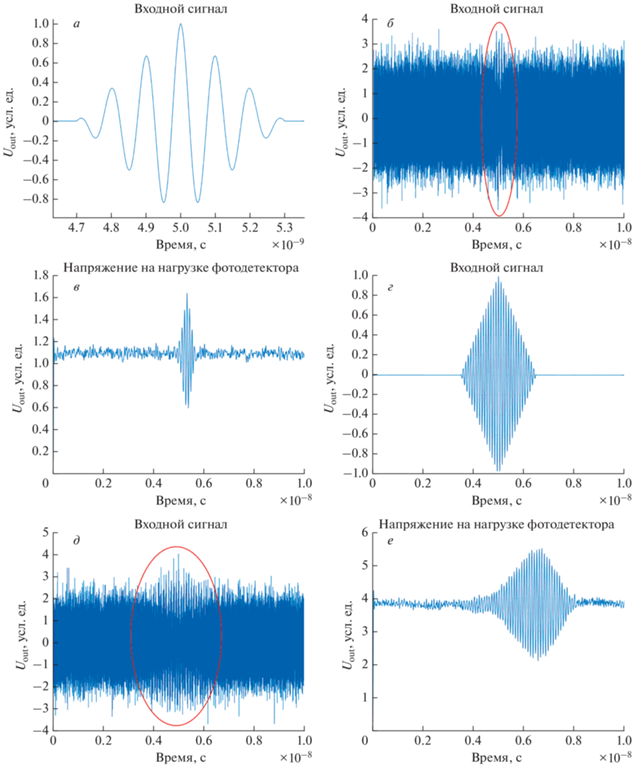
Фильтрация сверхширокополосного радиосигнала 10 ГГц, 3 нс с треугольной огибающей представлена на рис. 4г, 4д и 4е. При увеличении длительности импульса его вершина становится более плоская, что ухудшает разрешение по дальности при наличии шумов. В то же время здесь это разрешение составляет не хуже нескольких длин волн излучения, т.е. оказывается менее 10 см для частоты 10 ГГц.
Интересно отметить, что увеличение количества линий задержки от 9 до 15 не приводит к пропорциональному улучшению разрешающей способности для радиоимпульсов с треугольной огибающей длительностью не более 10–20 нс. При этом время фильтрации оказывается порядка времени прохождения сигнала по фильтру (доли микросекунды). При реализации оптимального фильтра с применением дискретных комплектующих максимальное количество линий задержки может ограничиваться также и технологическими факторами. В итоге количество линий задержки, применяемое в реальной системе, определяется компромиссом между технологически допустимым числом линий задержки и точностью определения задержки, ограничиваемой как шириной ступеньки, так и достигаемым отношением сигнал/шум. Детальное исследование характеристик радиофотоного оптимального приемника для различных типов и параметров сигнала будет представлено в последующих работах.
ЗАКЛЮЧЕНИЕ
Исследованы характеристики радиофотонного оптимального приемника, реализованного по схеме параллельного фильтра. Продемонстрированы его хорошие фильтрующие свойства. Выяснено влияние числа линий задержки и разности их длин на выходной сигнал оптимального фильтра. Для случая переменной разности длин соседних линий задержки форма выходного сигнала значительно искажается и становится несимметричной. В то же время при таких изменениях вершина импульса отклика сохраняет свое положение и совпадает с точкой окончания входного импульса, что доказывает возможность использования параллельных фильтров с неравномерным расположением точек вычисления весовых коэффициентов. Внутренние шумы оптимального приемника обеспечивают отношение сигнал/шум, достаточное для уверенного обнаружение входного сигнала и определения времени его прихода.
Работа поддержана Российским фондом фундаментальных исследований (проекты № 19-29-06108-мк и 20-07-00768-а).