ВВЕДЕНИЕ
Известно, что магнитное облако является наиболее геомагнитоэффективным корональным плазменным потоком, вызывающим глобальные геомагнитные бури. Впервые такие потоки были обнаружены достаточно давно [1] и введение термина было позднее [2]. Магнитные облака представляют собой магнитные трубки, имеющие в эклиптическом сечении размеры, превышающие несколько тысяч радиусов Земли (рис. 1а). В 1974 г. по прямым измерениям межпланетного магнитного поля (ММП) на космических аппаратах (КА) были обнаружены специфические структурные области межпланетных возмущений, характеризующиеся сильными регулярными ММП и резким фронтом (сильным разрывом) [3, 4]. Эти области были условно названы “магнитными областями”. В дальнейшем, начиная с 1981 г., их стали называть “магнитными облаками” по терминологии, предложенной в 50-х гг. [5]. Эти выбросы солнечного коронального вещества характеризуются значительным вращением вектора магнитного поля, сильным магнитным полем, низкой температурой ионов и низким динамическим давлением [6, 7]. Они могут содержать в своем объеме значительную отрицательную вертикальную Bz компоненту ММП [8] и поэтому вызывают наиболее интенсивные магнитные бури [9, 10]. В наших работах [11–13] также обращено внимание на физическую связь суббуревого процесса с магнитными облаками.
Рис. 1.
Схематическое изображение облака в виде магнитной трубки (а); фрагмент модельного цилиндрического магнитного облака (б).
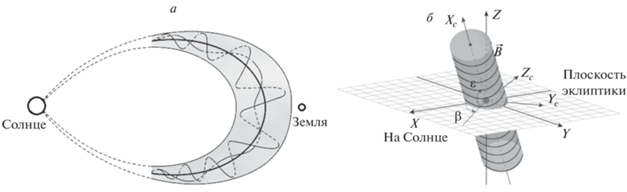
В настоящее время существует несколько моделей для описания структуры магнитных облаков. Наиболее распространенным является бессиловой подход [14]. Он предполагает, что токи в облаке параллельны (антипараллельны) линиям магнитного поля, а перпендикулярная компонента тока отсутствует. Этот подход используют для тороидальной [15, 16] или цилиндрической [17, 18] конфигураций поля в облаке. Для более точного приближения рассматриваемых моделей к реальному магнитному облаку для учета особенностей его переноса в межпланетном пространстве в модель облака добавляют его взаимодействие с солнечным ветром. В результате этого форма модельного облака меняется, отклоняясь от цилиндрической [19, 20]. Описание магнитных облаков выполняется также на не бессиловых моделях, в которых учитывается наличие в облаке не нулевой перпендикулярной компоненты тока [21]. Все эти модели и приближения согласуются друг с другом и, как показано в [19], усложнение модели в действительности не ведет к существенным уточнениям основных параметров облаков – величины магнитного поля на оси облака, его радиуса, прицельного параметра по отношению к Земле, углов наклона к плоскости эклиптики (углы β, ε на рис. 1б). Поскольку именно эти характеристики облаков являются ключевыми с точки зрения их геоэффективности [22–25], то в своих исследованиях мы используем простейшую бессиловую цилиндрическую модель [26–28].
Уравнения, описывающие распределение магнитного поля в бессиловой модели облака, получают исходя из уравнений Максвелла. Модельное представление цилиндрического магнитного облака показано на рис. 1б.
Работа посвящена аналитическому определению радиального распределения азимутальных и продольных возмущений компонент магнитного поля в теле коронального потока типа магнитного облака солнечного ветра. Найденные распределения далее сопоставляются с зарегистрированными параметрами возмущений магнитного поля на патрульном космическом аппарате (КА), пересекаемом телом магнитного облака. Инструментом для оценки качества выполненных аналитических расчетов выступает корреляционный анализ.
АНАЛИТИЧЕСКИЕ РАСЧЕТЫ В РАМКАХ МАГНИТОГИДРОДИНАМИЧЕСКОГО ПОДХОДА
Получим аналитические особенности радиального распределения магнитогидродинамических (МГД) возмущений компонент магнитного поля в модельном теле облака солнечного ветра в виде бессиловой бесконечной цилиндрической трубки со спиральным магнитным полем. Исследование возмущений выполняем в цилиндрической системе координат. Магнитогидродинамический подход дает возможность искать решение системы уравнения в виде радиальной зависимости малых гармонических азимутальных и продольных возмущений. В заключение аналитических расчетов получена система уравнений для радиальных зависимостей компонент возмущения магнитного поля в модельном облаке, которая позволяет перейти к уравнению второго порядка для смещения среды. Далее полученное уравнение решается численным методом.
Запишем исходную систему магнитогидродинамических уравнений в виде:
Модель спирального магнитного поля облака представляется следующими выражениями для компонент магнитного поля в цилиндрической системе координат [29]: $rot\vec {B} = \alpha \vec {B}$ ${{B}_{r}} = 0$ ${{B}_{Z}} = {{B}_{0}}{{J}_{0}}(\alpha r)$ ${{B}_{\varphi }} = {{B}_{0}}{{J}_{1}}(\alpha r),$ где $\alpha = \frac{{2.4}}{a},$ а – радиус цилиндрического облака, коэффициент 2.4 является первым корнем функции Бесселя. J0, J1 – функции Бесселя нулевого и первого порядка, являющихся каноническими решениями дифференциального уравнения Бесселя.
Обозначим смещение среды через ${{\vec {\xi },}}$ тогда скорость $\vec {u} = \frac{{\partial {{\vec {\xi }}}}}{{\partial t}}.$ При этом примем, что среда магнитного облака удовлетворяет следующим условиям:
где р – давление.
Считаем возмущения параметров среды (смещения ${{\vec {\xi }}}$) и магнитного поля ($\vec {b} \ll \vec {B}$) малыми, а поток среды отсутствующим. Последнее допущение возможно, поскольку за время пересечения облака космическим аппаратом оно практически не меняет свою геометрию. Тогда, исходя из уравнения магнитной гидродинамики ${\text{rot}}\vec {E} = - \frac{1}{c}\frac{{\partial{ \vec {B}}}}{{\partial t}},$ обобщенного уравнения Ома $\vec {E} = \frac{1}{с}\left[ {\vec {u} \times \vec {B}} \right] + \frac{{\vec {j}}}{\sigma }$ в условиях бесконечной проводимости $\sigma \to \infty $ для малых возмущений магнитного поля и смещения среды и, учитывая, что $\vec {u} = \frac{{\partial {{\vec {\xi }}}}}{{\partial t}},$ получим соотношение $\frac{{\partial{ \vec {b}}}}{{\partial t}} = {\text{rot}}\left[ {\frac{{\partial{ \vec {\xi }}}}{{\partial t}} \times \vec {B}} \right],$ дающее соотношение рассматриваемых возмущений: $\vec {b} = {\text{rot}}\left[ {\vec {\xi } \times \vec {B}} \right].$
В этом случае, согласно оставшимся МГД уравнениям, уравнение для возмущения смещения будет иметь вид:
(1)
$\begin{gathered} \frac{{{{\partial }^{2}}\vec {\xi }}}{{\partial {{t}^{2}}}} = \frac{1}{{4\pi \rho }}\left[ {\left( {{\text{rot\;}}\left( {{\text{rot}}\left[ {\vec {\xi } \times \vec {B}} \right]} \right)} \right) \times \vec {B}} \right] + \\ + \,\,\frac{1}{{4\pi \rho }}\left[ {{\text{rot}}\vec {B} \times {\text{rot}}\left[ {\vec {\xi } \times \vec {B}} \right]} \right]. \\ \end{gathered} $Поскольку вычисления проводятся в цилиндрической системе координат, то для малых гармонических возмущений следует принять [29, 30]: $\vec {b},\vec {\xi } \sim \exp \left( { - i\omega t + im\varphi + ikz} \right).$ Далее вычисляем члены, входящие в уравнение (1) для смещения:
Учитывая $\nabla \Psi = \frac{{\partial \Psi }}{{\partial r}}{{\vec {r}}_{0}} + \frac{1}{r}\frac{{\partial \Psi }}{{\partial \varphi }}{{\vec {\varphi }}_{0}} + \frac{{\partial \Psi }}{{\partial z}}{{\vec {z}}_{0}}$ для произвольной скалярной функции Ψ получаем
Принимая во внимание модель магнитного поля, учтем следующие выражения:
Учитывая, что, согласно [29, 30], $\frac{{\partial {{{\vec {\varphi }}}_{0}}}}{{\partial \varphi }} = - {{\vec {r}}_{0}},$ получаем
2) Принимая во внимание, что ${\text{rot}}{{\vec {\varphi }}_{0}} = \frac{1}{r}\frac{\partial }{{\partial r}}\left( {r \times {{1}_{\varphi }}} \right){{\vec {z}}_{0}} = \frac{{{{z}_{0}}}}{r}.$
Вычисляем члены, возникающие вследствие действия второго ротора в (1)
Применим сокращение записи для ${\text{rot}}\left( {q\vec {\xi }} \right) = A{{\vec {r}}_{0}} + B{{\vec {\varphi }}_{0}} + C{{\vec {z}}_{0}},$
Далее вычисляем члены, входящие в выражение:
Таким образом найдены все члены уравнения для смещения:
В скалярной форме, после введения в обозначения составляющих hi и gi компонент векторов $\vec {h}$ и $\vec {g}{\text{,}}$ уравнение примет вид:
Выполним вычисление составляющих вектора $\vec {h} = \left[ {{\text{rot}}\left( {{\text{rot}}\left[ {\vec {\xi } \times \vec {B}} \right]} \right) \times \vec {B})} \right],$ следуя модели ${\text{rot}}\vec {B} = \alpha \vec {B} = \beta {{B}_{0}}\left( {{{J}_{1}}{{{\vec {\varphi }}}_{0}} + {{J}_{0}}{{{\vec {z}}}_{0}}} \right)$ магнитного поля в облаке:
Вычисление составляющих вектора $\vec {g} = \left[ {{\text{rot}}\vec {B} \times {\text{rot}}\left[ {\vec {\xi } \times \vec {B}} \right]} \right],$ следуя модели ${\text{rot}}\vec {B} = \alpha \vec {B} = \beta {{B}_{0}}\left( {{{J}_{1}}{{{\vec {\varphi }}}_{0}} + {{J}_{0}}{{{\vec {z}}}_{0}}} \right)$ магнитного поля в облаке:
Окончательно система уравнений для расчета смещений имеет следующий вид:
Интересующее нас распределение возмущения магнитного поля определяется согласно уравнению
СОПОСТАВЛЕНИЕ РАСЧЕТНЫХ НИЗКОЧАСТОТНЫХ ХАРАКТЕРИСТИК МОДЕЛЬНОГО СПИРАЛЬНОГО МАГНИТНОГО ОБЛАКА СОЛНЕЧНОГО ВЕТРА С ЗАРЕГИСТРИРОВАННЫМИ ВОЗМУЩЕНИЯМИ
Решение системы уравнений с целью получения радиального распределения компонент смещения для возмущений на разных частотах как параметров продолжено итерационным алгоритмом Эйлера [31]. В качестве граничного условия было выбрано отсутствие смещения на поверхности магнитной трубки ${{\xi }_{r}}(r = a) = 0.$
Известно, что метод Эйлера применяется для решения систем дифференциальных уравнений или дифференциальных уравнений высших порядков с предварительным приведением к системам уравнений первого порядка. Используя формулы Эйлера вычисляются параметры для следующей итерации и на каждой последующей итерации записываются значения найденных функций и их производных. Расчет прекращался при выполнении одного из условий: достигнуты предельное число итераций или граница расчетной области. Как показал численный счет, метод Эйлера продемонстрировал устойчивое решение системы уравнений для расчетной области согласующейся с областями реально наблюдаемых тел облаков. Результаты численного счета приведены ниже на рис. 2 и 3.
Рис. 2.
Сопоставление результатов счета (красные кривые – Bφ выч, Bz выч) с реальными данными (синие кривые – Bφ реал, Bz реал) для тела 22.01.2000. Сопоставление Bφ реал, Bφ выч, R = 0.43 (а); сопоставление Bz реал, Bz выч, R = = 0.47 (б).
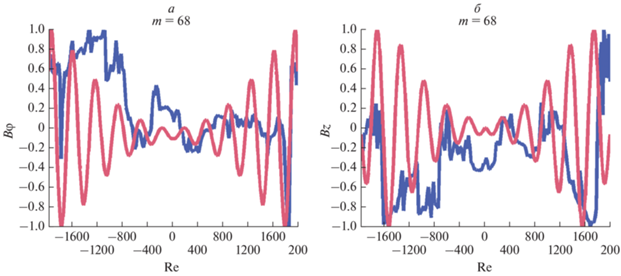
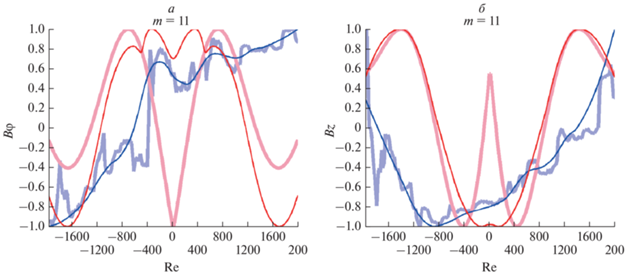
Рис. 3.
Сопоставление результатов счета с реальными данными для тела МО 10.11.2004 показано толстыми линиями. Постобработка цифровым сглаживающим фильтром расчетных и реальных данных представлена тонкими линиями. Красные кривые – Bφ выч, Bz выч, синие кривые – Bφ реал, Bz реал. Сопоставление Bφ реал и Bφ выч дает R = 0.31, после обработки сопоставление Bφ реал и Bφ выч дает R = 0.51 (а); сопоставление Bz реал, Bz выч дает R = 0.44, после обработки сопоставление Bz реал и Bz выч дает R = 0.58 (б).
Сопоставление рассчитанного радиального распределения компонент смещения магнитного поля в теле модельного облака с распределением компонент магнитного поля в теле зарегистрированного МО выполнялась для двух среднестатистических МО, зарегистрированных 22.01.2000 и 10.11.2004. Указаны начальные даты зарегистрированных событий.
Из всего объема имеющихся данных в общедоступных каталогах по МО далеко не все удовлетворяют модельному представлению. Критериями отбора были спиральность магнитного поля и минимальный наклон оси цилиндрического облака к плоскости эклиптики. Это означает, что тела магнитных облаков не всегда вписываются в выбранную идеализированную математическую модель. Найденные нами два МО близкие к идеальной модели мы считаем своей большой удачей. Указанные среднестатистические МО наиболее близки к идеальной математической модели. Данные возмущений взяты с минутным разрешением с КА АСЕ с узла http://cdaweb.gsfc.nasa.gov. Особенностью рассматриваемых облаков является ориентация их потоковой магнитной трубки близкая к вертикальной в солнечно-эклиптической системе координат. Особенностью сопоставления является необходимость замены регистрируемой динамики, т.е. временной зависимости возмущений, регистрируемых при пересечении облаком космического аппарата, на пространственное распределение возмущений. Это можно делать для низкочастотных возмущений с периодами сопоставимыми со временем пересечения. Для анализируемых в исследовании событий МО, время пересечения тела облака космическим аппаратом, составляло приблизительно 10 часов, что и определяло характерные периоды исследуемых возмущений.
Предварительные оценки величин волнового числа k и номера моды m, которые являются независимыми переменными в решаемой системе МГД уравнений, а также сам процесс сопоставления вычисленных и наблюдаемых радиальных распределений установили физические ограничения на диапазон их значений. В численных экспериментах волновое число k для НЧ флуктуаций выбиралось исходя из диапазона периодов, сопоставимых со временем пересечения МО космическим аппаратом. При заданном k номера подходящих мод m подбирались экспериментально таким образом, чтобы при сопоставлении пар азимутальных Bφ и продольных Bz компонент реальных (реал) и вычисленных (выч) возмущений магнитного поля отмечалась согласованность. Так, для МО 10.11.2004 оказалось, что m = 11, для МО 22.01.2000 – m = 68.
Необходимость исключения из рассмотрения незначащих высокочастотных колебаний для концентрации внимания на анализе НЧ флуктуаций компонент межпланетного магнитного поля, потребовала дополнительной обработки получаемых решений. Постобработка результатов счета и сопоставляемых с ними реальных данных выполнялась цифровым сглаживающим фильтром. Из них количественно по результатам корреляционного анализа выбирался наиболее удачный вариант описания связи соответствующих Bφ и Bz компонент. На рисунках 2 и 3 по оси ординат представлена условная амплитуда значений компонент поля, по оси абсцисс – радиальная развертка в масштабах радиуса Земли (Re) по срезу цилиндрической потоковой трубки с осью симметрии в центре. На рис. 2 демонстрируются результаты счета и сопоставляемых с ними реальных данных для тела МО 22.01.2000 без дополнительной обработки. Получены следующие коэффициенты корреляции: R = 0.43 между зарегистрированным Bφ реал и вычисленным Bφ выч; R = 0.47 между зарегистрированным Bz реал и вычисленным Bz выч. На рис. 3 демонстрируется постобработка результатов счета и сопоставляемых с ними реальных данных для тела МО 10.11.2004 цифровым сглаживающим фильтром при анализе периода НЧ флуктуаций 600 мин. Получены следующие коэффициенты корреляции: R = 0.44 между Bφ реал и Bφ выч; R = 0.31 между Bz реал и Bz выч. Постобработка цифровым сглаживающим фильтром расчетных и реальных данных повысила корреляцию: R = 0.51 между Bφ реал и Bφ выч; R = 0.58 между Bz реал и Bz выч.
Сопоставление показало, что аналитико-численное решение дает общее представление о радиальном распределении возмущенных компонент магнитного поля в теле МО, согласующееся с реально зарегистрированной динамикой параметров МО на патрульном КА.
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
Как видно из представленных графиков, аналитико-численное решение дает общее представление о радиальном распределении компонент смещения магнитного поля в теле магнитного облака для НЧ возмущений, согласующееся с реально зарегистрированной динамикой параметров на патрульном КА. Это подтверждается корреляционным анализом результатов. Совместная постобработка результатов счета и сопоставляемых с ними реальных данных усиливает их согласованность. В ходе исследования обнаружилось, что из всего объема имеющихся данных в общедоступных каталогах по МО далеко не все удовлетворяют модельному представлению в виде цилиндра со спиральным распределением магнитного поля. Это означает, что тела магнитных облаков не всегда вписываются в выбранную идеализированную математическую модель. Разумеется, существует достаточное количество магнитных облаков, которые достаточно близки к этим моделям. Их качественные особенности изучаемых возмущений совпадают с экспериментальными данными, но они формально не дают высокой степени корреляции с экспериментом. В связи с этим мы эти результаты не приводим. Выполненные исследования подтверждают обоснованность выбранной модели для тела магнитного облака и примененного МГД подхода к анализу колебаний в нем. Предлагаемый в исследовании метод может считаться дополнительным к анализу низкочастотных характеристик параметров магнитных облаков методами Фурье- и вейвлет-спектрального анализа.