ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
ЭЛЕКТРОННАЯ КОМПОНЕНТНАЯ БАЗА, ФОТОНИКА
И ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
УДК 004.9
МЕТОДИКА РЕГИСТРАЦИИ И ИДЕНТИФИКАЦИИ
РАДИОЛОКАЦИОННЫХ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ
ЭЛЕМЕНТОВ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
© 2021 г. С.М. Климов, А.Н. Семенов*
ФГБУ «4 ЦНИИ» Минобороны России, Королев, Россия
* E-mail: Sean1968@mail.ru
Предложена методика регистрации и идентификации радиолокационных сигналов космических средств дис-
танционного зондирования Земли, использующая для распознавания режимов ведения радиолокационного на-
блюдения комбинированный метод, включающий использование элементов искусственного интеллекта в виде
нейронной сети. Конструирование и обучение нейронной сети проводилось на основе априорных данных по
радиолокационным сигналам и результатам стендового моделирования радиолокационных систем дистанци-
онного зондирования Земли. Цель разработки методики заключалась в обеспечении заданного уровня обнару-
жения, регистрации, идентификации радиолокационных сигналов для принятия мер при ведении радиолока-
ционного наблюдения путем оповещения о фактах и режимах его ведения.
ВВЕДЕНИЕ
обеспечивающие прием и измерение параметров
Современное развитие космических средств
электромагнитных волн, далее датчики обнаруже-
дистанционного зондирования Земли (ДЗЗ) позво-
ния (ДО).
ляет проводить оперативный контроль состояния
Методика регистрации и идентификации обна-
критически важных объектов инфраструктуры и
руженных зондирующих радиолокационных сиг-
транспорта. Из всех направлений получения дан-
налов должна обеспечить получение данных по па-
ных ДЗЗ в настоящий момент особое развитие
раметрам принятого сигнала и определить режим
получили радиолокационные средства, использу-
ведения РЛН.
ющие технологию синтезирования апертуры ан-
тенны и позволяющие круглосуточно получать ра-
МЕТОДИЧЕСКАЯ ЧАСТЬ
диолокационные изображения, не уступающие по
В настоящее время для радиолокационного ДЗЗ
разрешению данным оптико-электронных средств.
используются космические аппараты (КА), осна-
Услуги по проведению радиолокационного наблю-
щенные чаще всего РСА и работающими в X, C и S
дения космическими средствами ДЗЗ в настоящее
диапазонах электромагнитных волн.
время предоставляются только зарубежными ком-
Большинство РСА работают в X-диапазоне, что
паниями, которые, зачастую, не сообщают параме-
обусловлено необходимостью соблюсти требова-
тры зондирующих радиолокационных сигналов.
ния международного Регламента радиосвязи и в
Особенностью радиолокационного наблюдения
то же время обеспечить ширину спектра сигнала,
является то, что существует возможность получе-
необходимую для получения радиолокационных
ния данных по параметрам и режимам работы ра-
изображений (РЛИ) с высоким разрешением. Так
диолокаторов с синтезированной апертурой (РСА)
в X-диапазоне возможно получение субметрового
антенны путем приема и обработки зондирующего
разрешения РЛИ, также данный диапазон харак-
радиолокационного сигнала.
теризуется возможностью лучшей селекции отра-
Для получения реальных параметров зондирую-
женных сигналов по сравнению с L- и S-диапазо-
щих сигналов от РСА, используемых при проведе-
нами, что обеспечивает увеличение вероятности
нии радиолокационного наблюдения (РЛН), мож-
обнаружения малоразмерных объектов на фоне
но использовать специализированные приемники,
местности.
49
50
С.М. КЛИМОВ, А.Н. СЕМЕНОВ
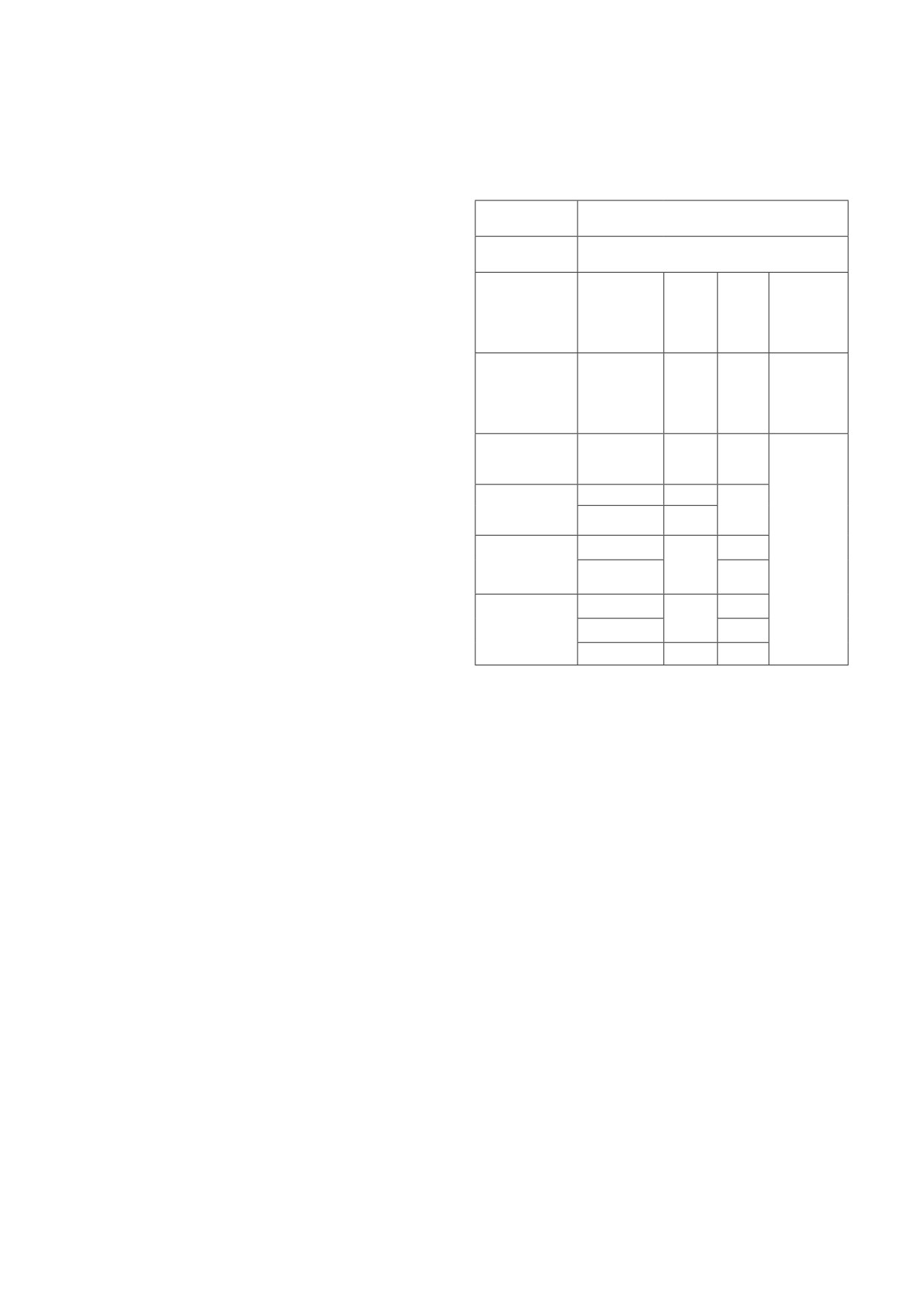
К числу КА ДЗЗ с РСА X-диапазона относятся
Таблица 1. Планируемые характеристики РСА «Касатка-Р»
КА «Обзор-Р»
[1-3]:
• «ИГС-Радар» - серия японских КА двойного
Спектральный
назначения;
Х-диапазон (3.1 см)
диапазон
• «Сар-Лупе» (SAR-Lupe) - система КА, развер-
Периодичность
2 (в полосе от 35 до 60 градусов с.ш.)
нутая Германией;
съемки, сутки
• «Космо-Скай-Мед» (COSMO-SkyMed) - италь-
Ши-
Номинальное
янская система;
Полоса
рина
простран-
Поляриза-
Режим
обзора,
полосы
• «Радарсат-3» (Radarsat-3) - коммерческие ка-
ственное раз-
ция
км
съем-
решение, м
надские КА ДЗЗ;
ки, км
• «Айсай» - система КА ДЗЗ с РСА, созданная
Одинар-
в Финляндии, и ряд других, часто единичных
Высокодеталь-
ная (по
ный кадровый
1
2×470
10
выбору -
КА, эксплуатируемых как частными, так и госу-
режим (ВДК)
H/H,V/V,
дарственными службами.
H/V, V/H)
К особенностям КА ДЗЗ с РСА С-диапазона от-
Детальный
носится использование сигналов с шириной спек-
кадровый режим
3
2×600
50
(ДК)
тра, так же достаточной для реализации субметро-
Одинар-
Узкополосный
3
2×470
вого разрешения. Типичными представителями
ная (по
маршрутный
30
таких КА ДЗЗ являются:
5
2×600
выбору -
режим (УМ)
H/H,V/V,
• «Радарсат-2» (Radarsat-2) - канадский КА ДЗЗ;
20
130
H/V, V/H);
Маршрутный
• «Сентинел» (Sentinel-1) - европейские КА с
2×600
Двойная (по
режим
40
230
выбору - V/
РСА С-диапазона;
(V+H) и H/
• «ГаоФен» - китайские радарные спутники, за-
200
400
(V+H))
Широкополос-
явленные как аппараты двойного назначения.
2×600
ный маршрут-
300
600
В S-диапазоне реализуемо метровое разреше-
ный режим
500
2×750
750
ние, данные этого диапазона применяются при на-
блюдении растительного покрова, изучении геоло-
гической структуры земной поверхности, так для
диосигнала от РСА КА ДЗЗ непосредственно в мо-
измерения удельных объемов лесной биомассы.
мент ведения радиолокационной съемки.
В настоящее время в Российской Федерации ве-
Предлагаемая методика определяет порядок
дется подготовка к развертыванию отечественных
применения разработанных ДО на основе струк-
систем ДЗЗ, оснащенных РСА.
турно-функциональной декомпозиции и мате-
Запуск КА «Обзор-Р», оснащенного РСА «Ка-
матического моделирования совокупности ин-
сатка-Р» намечен на 2021 г. Характеристики РСА
формационных процессов поиска, обнаружения,
«Касатка-Р» позволяют в любое время суток и при
регистрации (записи) и идентификации РС от РСА
любой облачности получать РЛИ земной поверхно-
КА ДЗЗ с использованием комбинированных реша-
сти высокого разрешения [4]. Основные характе-
ющих правил:
ристики РСА «Касатка-Р» и планируемые режимы
• для идентификации известных РС - методом
ведения РЛН представлены в табл. 1.
эталонных сравнений параметров РС по сред-
Таким образом, рост числа КА ДЗЗ, оснащен-
неквадратическим отклонениям (СКО) и поро-
ных РСА, приводит к возможности круглосуточ-
говым значениям [5];
ного всепогодного контроля состояния различных
• для идентификации неизвестных РС - на осно-
объектов на территории Российской Федерации,
ве использования нейронных сетей и машинно-
причем в ряде случаев возникает необходимость
го обучения [6-8].
обнаружения с помощью ДО факта такого РЛН и
В настоящее время регистрация и идентифика-
выявления режима съемки. Кроме того, такие дат-
ция радиолокационных сигналов в датчиках обна-
чики обнаружения радиолокационных сигналов
ружения реализована для частотных диапазонов С
(РС) могут быть использованы в целях настройки и
(5-6 ГГц), Х (7-8, 9-10 ГГц), как наиболее распро-
калибровки отечественной системы РЛН.
страненных среди зарубежных КА ДЗЗ.
Датчики обнаружения представляют собой ап-
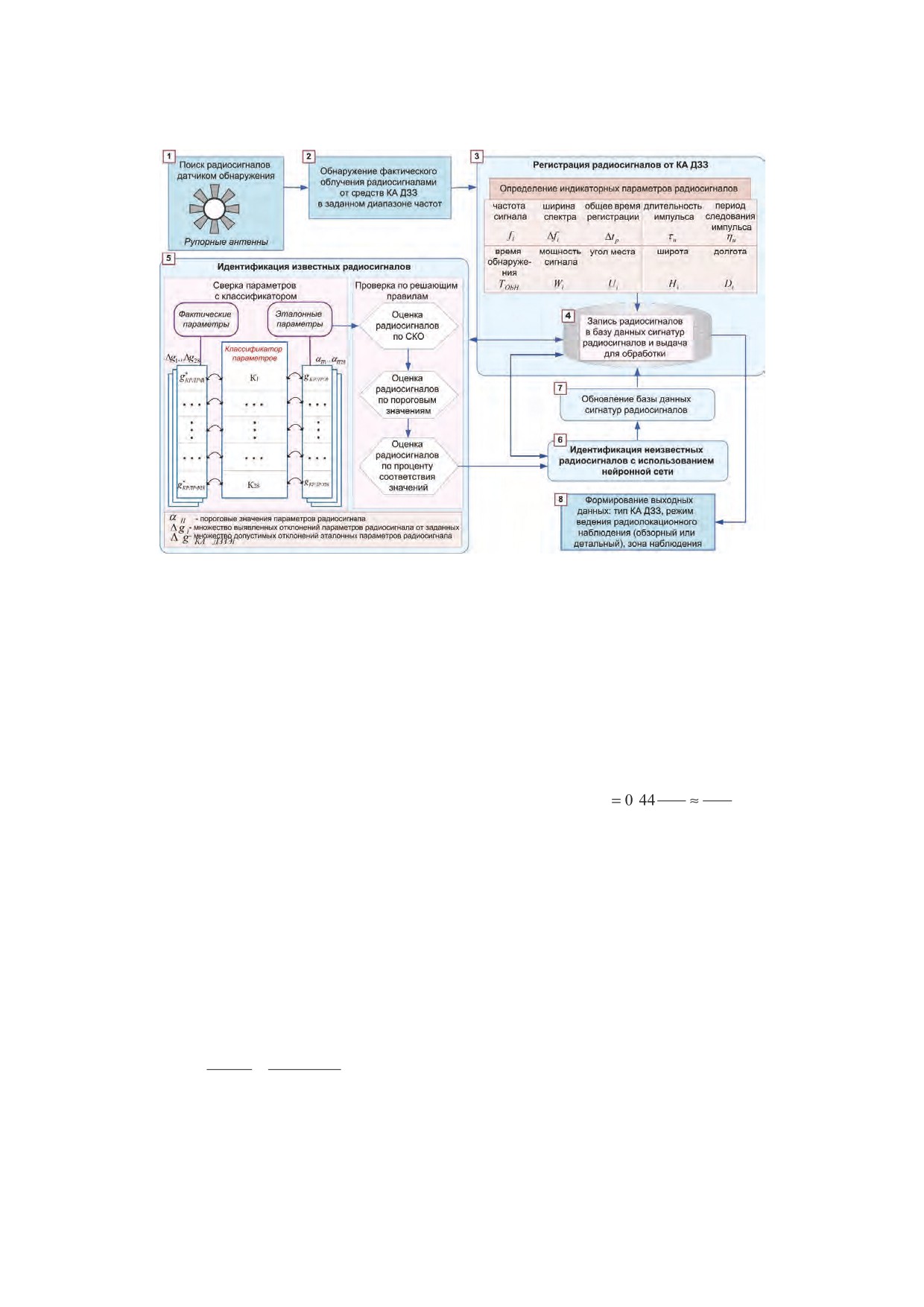
Схема методики регистрации и идентификации
паратно-программные комплексы, позволяющие
космических радиолокационных сигналов датчика-
осуществить фактическую запись и обработку ра-
ми обнаружения представлена на рис. 1.
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
МЕТОДИКА РЕГИСТРАЦИИ И ИДЕНТИФИКАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ...
51
Рис. 1. Схема методики регистрации и идентификации космических радиолокационных сигналов датчиками обнаружения
Реализация методики представлена следующей
Разрешение вдоль линии пути для РСА опре-
последовательностью действий.
деляется через отношение рабочей длины волны
На первом этапе производится поиск радиосиг-
к длине участка траектории движения КА ДЗЗ, на
налов с использованием антенной системы датчика
котором происходит когерентное запоминание при-
обнаружения, позволяющей принимать зондирую-
нимаемого радиосигнала и последующий синтез
щие радиосигналы от бортового РСА КА ДЗЗ по
искусственной апертуры (согласованная фильтра-
углу места от 15° над горизонтом и без ограниче-
ция траекторного сигнала):
ний по азимуту.
Rcf Rcf
Поиск радиосигналов осуществляется с исполь-
L
,
(2)
х
зованием рупорных антенн датчика обнаружения,
D
2D
a
a
позволяющих регистрировать зондирующие сигна-
лы от РСА КА ДЗЗ под углом 90 градусов относи-
где R - расстояние между КА ДЗЗ и центром теку-
тельно места расположения рупорных антенн.
щей полосы съемки; f - центральная частота зон-
Космические РСА осуществляют зондирование
дирующего сигнала; Da - длина синтезированной
радиосигналом, ширина спектра которого соответ-
апертуры антенны, то есть расстояние, пройденное
ствует разрешению по наклонной дальности LД и
КА ДЗЗ за время ведения наблюдения.
горизонтальной дальности на местности Ly.
Для РСА КА ДЗЗ диаграмма направленности
Разрешение по горизонтальной дальности на
реальной антенны радиолокатора мало влияет на
местности Ly поперек линии пути КА ДЗЗ в режи-
разрешающую способность по азимуту, которая
ме бокового обзора определяется выражением [1]:
определяется длиной синтезированной апертуры,
сформированной после приема радиосигналов.
L
Методика регистрации и идентификации кос-
Д
c
L
=
=
,
(1)
y
мических радиолокационных сигналов датчиками
sin(y )
i
2Δf
sin(y
i
)
обнаружения учитывает априорную информацию о
пролетах КА ДЗЗ, доступную, например, из такого
где Δf - ширина спектра зондирующего радиосиг-
источника, как сайт наблюдателей за КА [9].
нала; yi - угол между направлением падения ради-
На втором этапе обнаружение радиосигнала
осигнала и местной вертикалью; c - скорость рас-
производится путём его переноса на промежуточ-
пространения радиоволны (скорость света).
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
52
С.М. КЛИМОВ, А.Н. СЕМЕНОВ
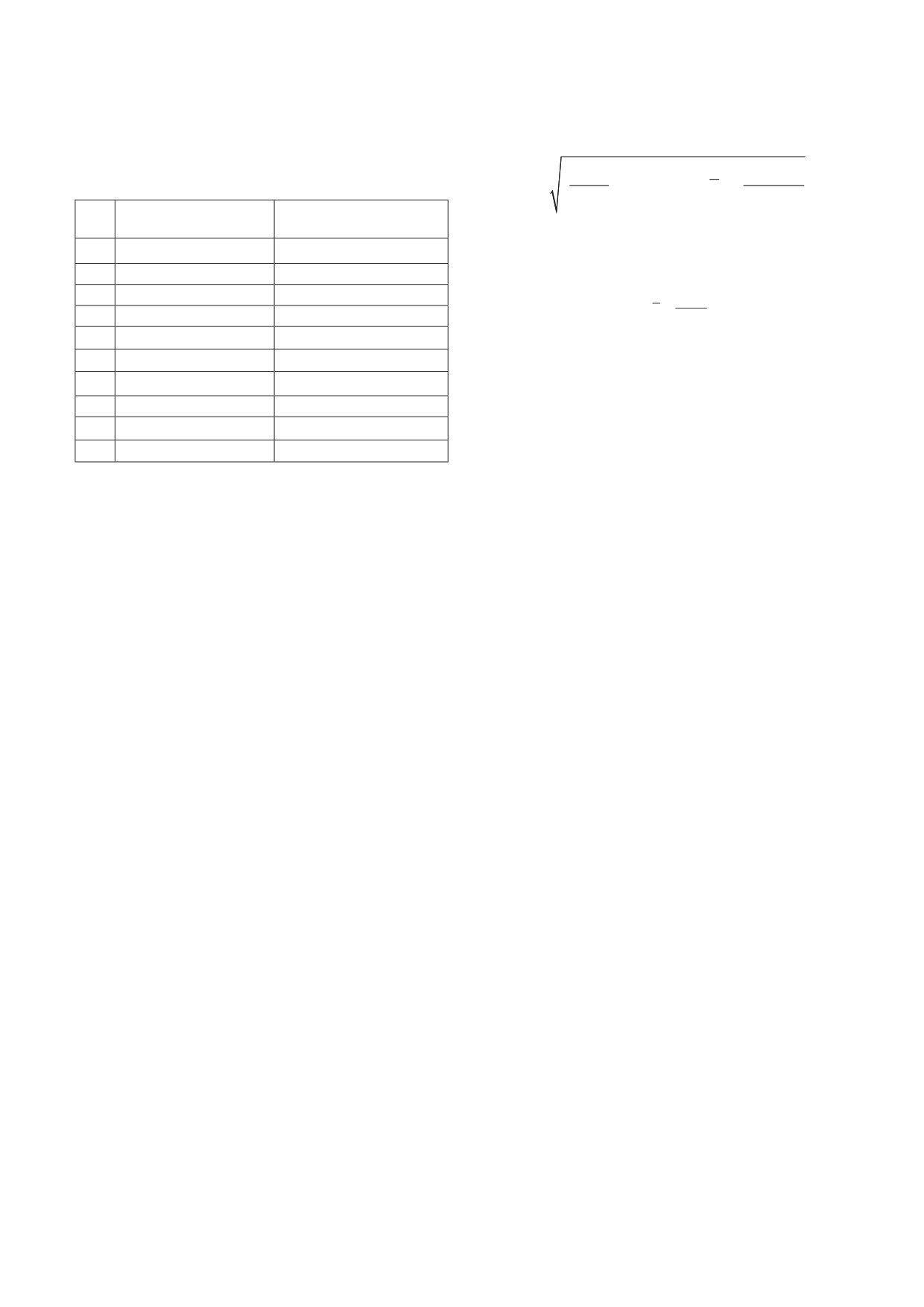
Таблица 2. Индикаторные параметры радиолокационных
КИЗМ
сигналов КА ДЗЗ
⎡
1
⎤
К
2
ИЗМ
σ
=
(g
−m
)
,
(3)
⎢
∑
КАДЗЗj
⎥
К
К
−1
⎣
ИЗМ
j=1
⎦
ИЗМ
№
Обозначение индикаторно-
Наименование индикаторного
п/п
го параметра, Ii
параметра
где КИЗМ - количество измерений параметров ра-
1
fi
центральная частота сигнала
диолокационных сигналов от средств КА ДЗЗ
2
Δfi
ширина спектра сигнала
(табл. 2); gКАД33j - значение параметра РС КА ДЗЗ
3
Δtp
общее время регистрации
К
ИЗМ
1
при j-ом измерении;
m
=
g
- оценка
∑
КАДЗЗj
4
τu
длительность импульса
К
ИЗМ j
=1
5
ηu
период следования импульсов
математического ожидания случайной величины
6
ТОБН
время обнаружения
gКАД33j, определяемое как среднее арифметическое
наблюдения её значений.
7
мощность сигнала
Wi
В выражении
(3) элемент формулы КИЗМ
/
8
Ui
угол места
(КИЗМ - 1) является поправкой, необходимой для
9
Hi
широта
уменьшения систематической ошибки измерений
10
Di
долгота
параметров РС.
Исходя из центральной предельной теоремы и
ную частоту и оцифровки для получения измеряе-
гипотезы о том, что случайные значения фактиче-
мых значений параметров радиосигнала.
ских параметров радиосигналов распределены по
Третий этап характеризуется первоначальной
нормальному закону [10] в методике среднеквадра-
регистрацией радиосигналов по десяти индикатор-
тичное отклонение измеряемого параметра gКАД33j
ным параметрам, которые установлены экспери-
задается на уровне 3σ (правило трёх сигма), а соот-
ментальным путём и представлены в табл. 2.
ветствующая этому уровню доверительная вероят-
На четвертом этапе проводится запись значений
ность равна РДВИРС = 0.997.
параметров радиосигналов в базу данных сигнатур
б) оценки пороговых значений:
радиосигналов и выдача исходных данных для их
формирование решающих (логических) правил
идентификации на основе сигнатурного анализа
идентификации радиолокационных сигналов (РС)
(для известных радиосигналов) и эвристического
от средств РЛН на основе сравнения каждого фак-
анализа с использованием нейронной сети (для не-
тического значения параметра, записанного РС с
известных радиосигналов).
его возможным пороговым значением в базе дан-
Идентификация известных РС по классифика-
ных сигнатур РС:
тору параметров проводится на пятом этапе путем
сравнения фактических (записанных) и эталонных
⎧∀t
∈T
,
g
∈G
КАДЗЗ
КДЗЗ КАДЗЗi
КАДЗЗ
параметров РС (относящихся к определенному
⎪
⎡
f
g
∈G
−⎤
⎪
(
Ф КАДЗЗФi
КАДЗЗФ
)
типу КА ДЗЗ). Для анализа известных и неизвест-
∃⎢
⎥
≥
α
⎪
ПОРi
ных РС GКАДЗЗ применяется единый классифика-
⎢
⎥
−
f
(
g
∈G
)
⎪
⎣
Э КАДЗЗЭ
i
КАДЗЗЭ
⎦
тор параметров {К1,…, К28} (классификационных
⎪
G
(
t
≤
t
)
:
КАДЗЗ КАДЗЗ
зад
⎨→Δ
g
∈Δg
, (4)
признаков) параметров РС.
i
КАДЗЗЭ
⎪
Идентификация известных радиосигналов от
⎪
⎧
f
, Δ
f
, Δt
,η
,
τ
,T
,⎫
И
Р
И И ОБН
G
=⎨
⎬
РСА КА ДЗЗ проведена на основе методов мате-
⎪
КАДЗЗ
⎩
w,U
,
H,D
⎭
⎪
матической статистики к оценке числовых харак-
⎪G
=
{
1,..., 28
}
теристик независимых случайных величин при
⎩
КАДЗЗ
ограниченном числе опытов [10] (при возможном
количестве измерений датчиками обнаружения
где TКАД33 - время в течении которого регистриру-
параметров радиосигналов в ходе 30-40 сеансов
ется радиосигнал КА ДЗЗ; GКАД33 - совокупность
ведения РЛН) путём их проверки по решающим
параметров РС, по которым осуществляется их
правилам:
идентификация;GИКАДЗЗ - совокупность индикатор-
а) оценки СКО:
ных параметров РС, по которым осуществляется
на основе метода моментов [10] и с использо-
их первоначальная регистрация; fф - функция от
ванием опыта экспериментальных исследований
фактических значений параметров РС; fэ - функция
запишем выражение для оценки СКО значений па-
от эталонных значений параметров РС; gКАД33Фi и
раметров радиосигналов от средств КА ДЗЗ:
gКАД33Эi - фактические и эталонные значения пара-
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
МЕТОДИКА РЕГИСТРАЦИИ И ИДЕНТИФИКАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ...
53
метров РС; αПОРi - пороговые (проверочные) значе-
ственных нейронных сетей в задачах идентифика-
ния параметров РС; Δgi - множество выявленных
ции (распознавания) радиолокационных сигналов.
отклонений параметров РС от заданных; ΔgКАД33Эi -
Выбор аппарата искусственной нейронной сети
множество допустимых отклонений эталонных па-
для проведения классификации неизвестных (не-
раметров РС.
распознанных) радиосигналов был обусловлен ря-
Подготовка пороговых значений для классифи-
дом ограничений и особенностей, присущим зон-
катора РС:
дирующим радиосигналам от РСА КА ДЗЗ, таким
как:
- ограниченные временные рамки для выполне-
g
∈G
→
{
К
,..., К
}
⎪∀
КАДЗЗΦi
КАДЗЗΦ
1
28
ния расчетов при проведении классификации, об-
⎨∀g
КАДЗЗЭi
∈G
КАДЗЗЭ
→
{
К
1
,..., К
28
}
,(5)
условленные высокой частотой поступления изме-
⎪
ЭТ
ЭТ
ЭТ
ряемых параметров РС;
∃α
∈
α
,...,α
→
max
Δg
⎪
ПОР
{
g
КАДЗЗЭi
g
АДЗЗЭ
i+1
}
КАДЗЗЭi
Δg
КАДЗЗЭi
∈G
КАДЗЗ
⎩
- значительный уровень априорной неопреде-
ленности, определенный во многом неизвестными
гдеαЭТПОР - множество допустимых отклонений зна-
значениями вероятности отнесения по классам,
чений фактических параметров от их эталонных
стоимости принятия решений, кроме того в случае
значений для каждого из множества {gКАД33Эi , ...,
появления нового типа КА ДЗЗ или режима работы
gКАД33Эi+1};
РСА до обновления данных отсутствует возмож-
Выполнение правил сверки фактических и эта-
ность набора обучающей статистики о распознава-
лонных параметров РС по пороговым значениям:
емых объектах;
- наличие различных помех, обусловленных,
ЭТ
⎧если Δg
≤Δg
→
α
,то
∃g
∈g
i
КАДЗЗЭi
g
КАДЗЗi
КАДЗЗΦ
i
КАДЗЗЭi
как средой распространения радиосигнала, так и
⎪
⎨
, (6)
радиоэлектронной обстановкой;
⎪
ЭТ
- возможностью вариации параметров РСА,
если Δg
≤
g
→
α
, то
∃
g
∈g
⎩
i+1
КАДЗЗЭi+1
g
КАДЗЗi+1
КАДЗЗΦi+1
КАДЗЗЭi+1
таких как мощность, центральная несущая ча-
где Δgi+1 - множество выявленных отклонений па-
стота зондирующих сигналов, постоянное изме-
раметров i+1-го значения РС от эталонного значе-
нение направления ведения РЛН относительно
ния; ΔgКАД33i+1 - множество допустимых отклоне-
ДО, обусловленные движением КА ДЗЗ по орби-
ний i+1-х эталонных параметров РС.
те и приводящие к изменению в широких преде-
На шестом этапе методики происходит иденти-
лах, так как цели РЛН в ряде случаев неизвестны
фикация неизвестных РС с использованием ней-
наблюдателю;
ронной сети.
- возможность одновременной регистрации и
В материалах публикаций [11, 12] продемон-
идентификации нескольких РС от различных КА
стрирована эффективность использования искус-
ДЗЗ.
Рис. 2. Настройка нейронной сети
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
54
С.М. КЛИМОВ, А.Н. СЕМЕНОВ
Рис. 3. Структурная схема формального нейрона
Рис. 4. Принцип обучения нейрона для идентификации
для идентификации неизвестных радиосигналов
неизвестных радиосигналов
Типовой алгоритм конструирования нейронной
заданному значению d. Графическое представление
сети для решения задачи распознавания неизвест-
принципа обучения приведено на рис. 4.
ных РС приведен на рис. 2.
Наиболее простой метод обучения заключается
Сущность использования схемы состоит в том,
в применении метода Видроу-Хоффа [13], в кото-
что на вход «распознавателя» поступает последо-
ром используются следующие формулы:
вательность векторов параметров, полученная в
результате аналого-цифрового преобразования ши-
wi (t + 1) = wi (t) + Δwi ,
(8)
рокополосного, сложно-модулированного электро-
магнитного РС. Причем полученные в результате
Δwi = gi (d - y).
(9)
преобразования значений РС содержат искажения,
Для задач классификации радиосигналов хоро-
внесенные в процессе его приема, первичной обра-
шо зарекомендовал себя принцип обучения нейро-
ботки и оцифровки.
на с учителем по принципу минимизации целевой
Согласно [12] нейронной сетью называется ди-
функции, определенной в виде:
намическая система, состоящая из совокупности
связанных между собой по типу направленного
2
(d − y)
(10)
графа элементарных процессоров, называемых
E w
=
2
формальными нейронами (рис. 3), и способная
генерировать выходную информацию в ответ на
В качестве функции активации используем сиг-
входное воздействие.
моидальную функцию, как наиболее адаптирован-
Математическая модель формального нейрона
ную для задач распознавания образов [14]. Функ-
для идентификации неизвестных радиосигналов
ция представлена формулой:
представляется уравнением:
1
n
n
(11)
f n)
=
n
y = f q)
=
f
(
g
w
+
w
)
=
f
(
g
w
)|
g
=1, (7)
∑
i
i
0
∑
i
i
0
1+
e−β
i
=1
i
=
0
Сигмоидальная функция является монотонной и
где y - выходной сигнал нейрона; f(q) - функция
всюду дифференцируемой. Для упрощения исполь-
выходного блока нейрона; wi - коэффициент - вес
зуем β = 1.
i-го входа, а w0 - начальное состояние (возбуж-
Выбор нейронной сети для проведения класси-
дение) нейрона; gi - i-ый входной сигнал; i = 1,
фикации радиосигналов был определен специфи-
2,..., n - номер входа нейрона, n - число входов.
ческими свойствами анализируемых объектов -
Функция f(q) называется также функцией акти-
значений параметров зондирующих радиосигналов
визации, поскольку передает значение на вход сле-
от КА ДЗЗ (табл. 2).
дующего слоя нейронов сети.
В настоящее время созданы и практически от-
Настройка весов входных воздействий - обу-
работаны пакеты специального программного обе-
чение нейрона состоит в таком подборе весов wi ,
спечения, позволяющие создавать и настраивать
чтобы выходной сигнал y был наиболее близок к
нейронные сети для решения различных приклад-
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
МЕТОДИКА РЕГИСТРАЦИИ И ИДЕНТИФИКАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ...
55
ных задач. Так для решения задачи идентификации
комплекса моделирования радиолокационных
космических радиолокационных сигналов датчика-
средств ДЗЗ в 4 ЦНИИ Минобороны России.
ми обнаружения был выбран пакет программного
В результате настройки и обучения была сфор-
обеспечения, аналогичный по функционалу Fuzzy
мирована и опробована нейронная сеть, пока-
Expert [7] реализующий трехслойную нейронную
завшая на ряде тестов результат правильного
сеть с обучением [15].
распознавания режимов работы РСА на основе об-
Задача распознавания была сформулирована
работки неизвестных сигналов с вероятностью до
следующим образом:
85%.
Имеется некоторое множество объектов {b1,
Седьмой этап методики состоит в автоматизиро-
b2,..., bN}, представляющих в нашем случае факты
ванном обновлении базы данных сигнатур извест-
ведения радиолокационного наблюдения (обнару-
ных и неизвестных радиосигналов на основе ана-
женные сеансы работы РСА). Априорно это мно-
лиза их параметров.
жество разделено на классы {Y1, Y2,..., YM}, т.е. со-
На восьмом этапе методики по результатам
вокупность режимов работы РСА (табл. 1) и тип
идентификации известных и неизвестных радио-
системы КА ДЗЗ. Данные классы являются алфа-
сигналов от средств КА ДЗЗ осуществляется фор-
витом распознавания. Кроме того известны при-
мирование выходной информации, такой как тип
знаки {g1, g2,..., gn}, на языке которых могут быть
КА ДЗЗ, режим работы РСА, расчетный район ра-
описаны классы и отдельные объекты, т.е. состав-
диолокационного наблюдения, расчетные значения
лен рабочий словарь признаков [16].
вероятности наблюдения объектов в заданном рай-
Положим, что классы априорно описаны на язы-
оне и т.п.
ке признаков. В общем виде такое описание можно
представить в форме соотношений, содержащих
ВЫВОДЫ
априорную информацию о классах объектов, запи-
Таким образом, предложенная методика реги-
санную в базу данных.
страции и идентификации параметров зондирую-
щих радиолокационных сигналов, представляющая
(12)
собой комбинацию классических методов распоз-
Yi = Fi(g1, g2,..., gn), i = 1,M,
навания, дополненную элементами искусственного
В случае регистрации датчиком обнаружения
интеллекта в виде нейронной сети, обеспечивает
сеанса ведения радиолокационной съемки bj прово-
на основе данных от датчиков обнаружения по па-
дится измерение значений, по которым формирует-
раметрам принятого радиолокационного сигнала
ся вектор признаков, описывающих объект. Требу-
определение режима ведения радиолокационного
ется распознать объект bj , т.е. установить, к какому
наблюдения.
классу он может быть отнесен. Для решения этой
Методика позволяет определить зону ведения
задачи необходимо сопоставить с помощью того
радиолокационного наблюдения, разрешение ради-
или другого алгоритма распознавания апостери-
олокационного изображения получаемого косми-
орной информации о распознаваемом объекте,
ческими средствами дистанционного зондирова-
ния Земли и тем самым позволяет оценить уровень
представленной в виде вектора g0
= {g0
, g0,..., g0}, с
j
1
2
n
детализации снимаемого объекта.
априорной информацией о классах объектов, фор-
мализованной в виде соотношения (12).
СПИСОК ЛИТЕРАТУРЫ
Алфавит классов был сформирован на осно-
1. Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э.,
ве априорной информации о режимах работы КА
Радиолокационные системы землеобзора космического
ДЗЗ, за основу были взяты режимы, приведенные
базирования. М.: Радиотехника, 2010, 674 с.
в табл. 1. Построение признакового пространства
2. Лисицин А. Космические системы дистанционного
системы распознавания было произведено на осно-
зондирования Земли зарубежных стран // Зарубежное
ве рабочего словаря признаков радиолокационных
военное обозрение. 2019, №7, с. 63-67.
сигналов (табл. 2).
3. Меньшаков Ю.К. Виды и средства иностранных тех-
Настройка нейронной сети проводилась на ре-
нических разведок: учеб.пособие / под ред. М.П. Сыче-
альных данных, полученных в ходе эксперимен-
ва. - М: Изд-во МГТУ им. Н.Э. Баумана, 2008, 656 с.:ил.
тальных работ с датчиками обнаружений и в ходе
моделирования режимов работы РСА на стенде
16.03.2021 г.).
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021
56
С.М. КЛИМОВ, А.Н. СЕМЕНОВ
5. Куприянов А.И. Радиосигналы и радиоустройства
12. Использование апостериорной информации при ре-
в информационных системах: учебное пособие: в 2 ч.
ализации систем радиолокационного распознавания с
Ч. 1: Радиосистемы и радиосигналы. М: Издательство
применением нейросетевых технологий / Д.Ф. Беско-
МГТУ им. Н.Э. Баумана, 2018, 118 с.
стый, С.Г. Боровиков, Ю.В. Ястребов, И.А. Созонтов //
Изв. вузов России. Радиоэлектроника. 2019, т. 22, №5,
6. Аксенов С.В., Новосельцев В.Б. Организация и исполь-
с. 52-60.
зование нейронных сетей (методы и технологии) / Под
общ. ред. В.Б. Новосельцева. - Томск: Изд-во НТЛ, 2006,
13. Осовский С. Нейронные сети для обработки инфор-
128 с.
мации / Пер. с польского И.Д. Рудинского. - М. Финансы
и статистика, 2002, 344 с: ил.
7. Комарцова Л.Г., Максимов А.В. Нейрокомпьютеры:
Учеб. пособие для вузов. - 2-е изд., перераб. и доп. -
14. Хайкин Саймон Нейронные сети: полный курс, 2-е
М.: Изд-во МГТУ им. Н.Э. Баумана, 2004, 400 с.: ил.
издание.: Пер. с англ. М. Издательский дом «Вильямс»,
2006, 1104 с.: ил. Парал. тит. англ.
8. Николенко С., Кадурин А., Архангельская Е. Глубокое
обучение. СПб.: Питер, 2020, 480 с.: ил.
21.12.2020 г.).
16.03.2021 г.).
16. Горелик А.Л., Барабаш Ю.Л., Кривошеев О.В.,
Эпштейн С.С. Селекция и распознавание на основе лока-
10. Вентцель Е.С. Исследование операций, М.: Совет-
ционной информации / Под ред. Горелика А.Л. - М.: Ра-
ское радио, 1972, 552 с.
дио и связь, 1990, 240 с.
11. Крайзмер Л.П., Кулик Б.А. Обработка сложных сиг-
налов на основе использования нейрокомпьютеров //
Персональный компьютер на вашем рабочем месте.
С.-П.: СИГУ. 1991, с. 228-231.
ВЕСТНИК ВИТ «ЭРА», том 2, номер 2, 2021