

Проблемы машиностроения и надежности машин, 2023, № 3, стр. 70-77
Разработка новых инструментов для эндоскопических хирургических операций
Р. Ф. Ганиев 1, В. А. Глазунов 1, П. С. Глушков 2, С. В. Левин 1, К. А. Шалюхин 1, *
1 Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
2 Центральная клиническая больница РАН
Москва, Россия
* E-mail: constmeister@gmail.com
Поступила в редакцию 15.02.2022
После доработки 20.01.2023
Принята к публикации 20.01.2023
- EDN: PQGCAF
- DOI: 10.31857/S0235711923030057
Аннотация
В статье рассмотрены новые устройства и инструменты для малоинвазивной эндоскопической хирургии, разработанные Институтом машиноведения им. А.А. Благонравова РАН совместно с Центральной клинической больницей Российской академии наук. Представлены экспериментальные образцы устройств и инструментов.
Сегодня одним из перспективных направлений в хирургии является проведение малоинвазивных эндоскопических операций [1–4], которые значительно снижают травматичность и ускоряют восстановление после операции, т.к. действия производятся через небольшой прокол. Малоинвазивные эндоскопические операции позволяют существенно снизить кровопотерю и риск инфицирования, что ускоряет выздоровление после операции. При проведении таких операций большие надежды возлагаются на применение специальных роботов и манипуляционных систем, которые при ручном или дистанционном управлении способны стать “ассистентами” хирурга [5, 6].
Разные виды операций сильно отличаются друг от друга по форме и объему рабочей зоны, а также набору используемых приспособлений и инструментов. Для различных операций требуются свои специфические манипуляторы и механизмы [6–9]. Созданы и используются хирургами различные устройства [10]. Наиболее известен хирургический комплекс daVinci Surgical System [11].
Проведение малоинвазивных операций требует наличия специального инструмента и оборудования, которые позволяют хирургу работать в крайне стесненных условиях при ограниченной видимости [12, 13]. Усилия многих разработчиков направлены на совершенствование существующих эндоскопических инструментов и создание новых [14, 15]. Широкое распространение получили простые эндоскопические инструменты, состоящие из управляющей рукояти и длинного тонкого звена, на конце которого закреплен захват, при необходимости заменяемый на лезвие или ножницы. Такие инструменты имеют постоянную ориентацию захвата, что не всегда удобно при проведении операций. Поэтому появились инструменты, которые способны вращаться вокруг своей оси вместе с захваченным объектом при постоянном положении его рукояти.
Более совершенные инструменты могут также иметь изгибающийся участок звена, что позволяет менять ориентацию захвата, например, инструмент “ROTICULATOR” [16]. Дополнительные возможности инструментов облегчают работу хирурга. Однако у существующих инструментов ограниченный угол и скорость изгиба, что связано со способом изгиба при помощи выдвижения из жесткой оболочки предварительно изогнутого троса.
Первым этапом хирургической операции обычно является рассечение тканей для обеспечения доступа хирурга к цели операции. В малоинвазивной хирургии доступ осуществляется через малые разрезы или проколы. Важной задачей в настоящее время является создание механизмов, обеспечивающих постоянное положение прокола. Разработан ряд механизмов, позволяющих сохранять постоянство точки прокола при поворотах инструмента. Такие механизмы создаются на основе параллелограмма [17] или используются круговые направляющие и сферические механизмы [7, 10]. Они обеспечивают поворот инструмента вокруг неподвижной точки ввода, что снижает травматичность операции. Поступательное движение инструмента в таких манипуляторах обычно осуществляется отдельным приводом.
Известны механизмы, позволяющие изогнуть участок инструмента подобно хоботу. Такой “хобот” является многозвенным последовательным манипулятором, имеющим несколько одинаковых звеньев [18]. В существующих конструкциях “хобот” имеет возможность изгиба в двух плоскостях, что несколько повышает его возможности в качестве манипулятора, однако усложняет управление инструментом. Кроме того, величина изгиба в имеющихся инструментах относительно невелика и не превышает 90°. Поэтому актуальной является разработка инструмента с изгибом в одной плоскости, но при значительно бóльших диапазонах угла изгиба.
Для решения таких задач в ИМАШ РАН совместно с ЦКБ РАН были разработаны манипуляторы и инструменты для проведения эндоскопических операций. В настоящей статье представлены некоторые из них. Необходимо отметить, что рассматриваемые инструменты представлены в виде экспериментальных макетов, позволяющих оценить применимость той или иной схемы для оказания помощи хирургу.
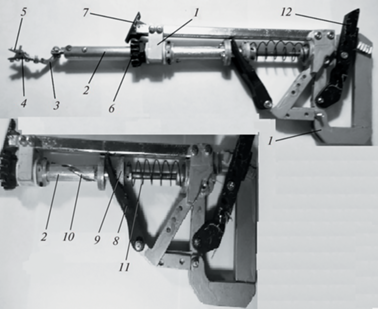
В частности, в ИМАШ РАН разработан инструмент с рабочим органом в виде цепочки из нескольких одинаковых элементов, способный изгибаться в плоскости на значительные углы, обладая хорошей управляемостью. На рис. 1 представлен общий вид инструмента и его захват 1 в положении максимального изгиба. С его помощью можно брать и удерживать хирургическую нить или другой объект. Инструмент также можно оснастить лезвием или ножницами.

Захват расположен на конечном звене изгибающегося многозвенного участка 2 инструмента (рис. 1). Изгибающийся участок, в свою очередь, соединен с начальным звеном 3, закрепленным на управляющей рукояти 4, которая играет в механизме роль основания. На ней также размещены органы управления – рычаг захвата 5 и переключатель изгиба инструмента 6. Рычаг захвата связан тросом с подвижной губкой. Трос управления захватом свободно проходит через все звенья инструмента. При этом для уменьшения влияния изгиба звена на положение захвата трос должен идти через оси поворота звеньев.
Изгиб участка инструмента производится натяжением троса изгиба, также свободно проходящего через все звенья инструмента. Один конец троса закреплен на конечном звене, а другой – на переключателе изгиба 6. При перестановке переключателя на гребенке рукояти он натягивает управляющий трос изгиба, и переключатель фиксируется в выбранном положении в пазу гребенки. Возврат захвата и звеньев в исходное положение производится возвратными пружинами. С помощью органов управления хирург может изменять положение и ориентацию захвата и, соответственно, зажатого объекта.
Максимальный изгиб при таком способе управления зависит от геометрии промежуточных звеньев и их количества. Для удобства стерилизации инструмент можно поместить в упругий эластичный чехол, который одновременно способен выполнять функцию разгибающих пружин звеньев.
По предложению ЦКБ РАН в ИМАШ РАН были разработаны инструменты, в которых ось вращения губок захвата перпендикулярна оси инструмента. Такое движение губок позволяет расширить возможности инструмента, поскольку повернутые губки можно использовать как крючок для действий с хирургической нитью. К этой группе относится инструмент с двумя независимыми губками (рис. 2).
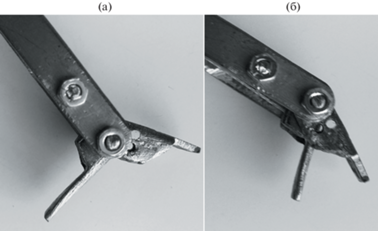
Этот инструмент подобен захвату EndoWrist, применяемому в роботе daVinci. Губки закреплены на одной оси на конце инструмента и вращаются в диапазоне углов, близком к 360°. При вращении навстречу друг другу они захватывают объект, например, нить. Далее объект перемещается совместным согласованным движением губок. При расположении губок с одной стороны инструмента (рис. 2б), образуется крючок, который можно использовать для зацепления нити.
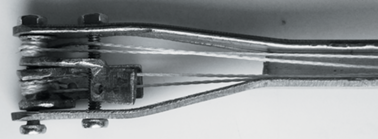
Губки могут располагаться с обеих сторон инструмента, образуя два крючка для зацепления нити (рис. 2а). Такие дополнительные возможности также облегчают действия с нитью. Если обе губки расположить вдоль оси инструмента, то они не создают препятствия при соскальзывании нити. Подобный инструмент удобен при вязании узлов. Основание-рукоять инструмента содержит два рычага управления, связанных управляющими тросами (рис. 3) с губками захвата.
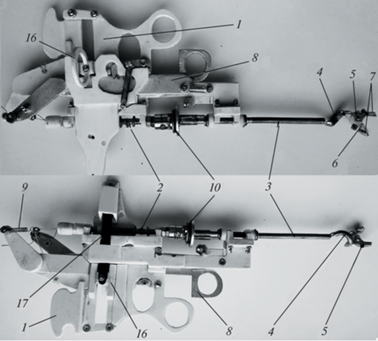
В ИМАШ РАН также разработаны инструменты с витым участком звена и фиксированным поворотом захвата на 180° и 360°. Такая форма звена и фиксированный поворот захвата облегчают захват нити и вязание узлов, что обеспечивает новым инструментам преимущество перед существовавшими ранее конструкциями. Важной особенностью этих механизмов является возможность фиксации захвата в выбранном положении. На рис. 4 показан первый из разработанных в ИМАШ РАН инструментов такого типа.
На основании-рукояти 1 размещено подвижное выходное звено 2. Оно имеет возможность вращаться вокруг своей оси. На конце звена последовательно закреплены витой участок 3 и захват 4, который имеет неподвижную губку, жестко прикрепленную к винтовому участку и подвижную губку 5. Произвольный поворот звена 2 осуществляется поворотом закрепленного на звене зубчатого колеса 6, которое фиксируется в требуемом положении рычагом фиксации 7, расположенным на рукояти-основании. В этом инструменте фиксированный поворот звена на 180° осуществляется специальным рычагом 8, расположенным на основании. При нажатии рычаг 8 давит на кольцевой выступ 9. Этот кольцевой выступ закреплен на конце трубки с пальцем. Расположенная внутри звена 2 трубка сдвигается назад, при этом палец движется в спиральном пазе 10 звена 2, поворачивая звено и закрепленный на нем захват. Фиксация звена осуществляется специальным рычагом 7, расположенным на основании и зубчатым колесом 6, закрепленным на звене. Эти же элементы используются для произвольного ручного поворота звена. Возврат трубки в исходное положение при отпускании рычага 8 осуществляется возвратной пружиной 11. При возврате не происходит вращения захвата.
Для открывания захвата в качестве возвратной пружины использованы постоянные магниты, закрепленные на губках и имеющие встречное направление полюсов. Для управления захватом предназначен рычаг 12 (рис. 4), шарнирно закрепленный на рукояти-основании. Он связан с подвижной губкой захвата тросом, проходящим через трубчатый винтовой участок 3 и трубчатое выходное звено 2. Закрытие захвата фиксируется расположенной на рукояти гребенкой.
Второй из разработанных в ИМАШ РАН инструментов подобного типа представлен на рис. 5 в двух ракурсах: с верхней и нижней сторон.
В первую очередь инструмент предназначен для оказания помощи хирургу в вязании узлов при ограниченном доступе. Инструмент обеспечивает удержание объекта при повороте захвата, ручное свободное вращение захвата и фиксации его в выбранном положении, поворот захвата на фиксированный угол 360° в одну и другую сторону.
В первую очередь инструмент предназначен для оказания помощи хирургу в вязании узлов при ограниченном доступе. Инструмент обеспечивает удержание объекта при повороте захвата, ручное свободное вращение захвата и фиксации его в выбранном положении, поворот захвата на фиксированный угол 360° в одну и другую сторону.
На рукояти 1, которая играет роль основания, соосно установлены ведущий 2 и ведомый 3 полые валы, каждый из которых установлен на две опоры. Эти валы имеют возможность независимого вращения. На конце ведомого вала 3 закреплен трубчатый витой участок 4 с захватом 5, имеющий неподвижную и подвижную 6 губки. На обеих губках захвата находятся постоянные магниты 7. Они имеют встречно направленные полюса и играют роль пружины раскрытия захвата. Неподвижная губка жестко закреплена на витом участке 4, подвижная губка 6 связана тросами управления, проходящими через оба вала, с рычагом управления захватом 8 и возвратной пружиной 9.
Фиксация рычага захвата в сжатом положении производится защелкой, которая попадает в зубья рычага 8. Освобождение рычага производится вручную. Связь ведущего и ведомого валов осуществляется с помощью переключающей муфты 10, которая вручную перемещается из одного крайнего положения в другое. Более подробно узел переключения режимов показан на рис. 6а. Муфта 10 всегда связана с ведомым валом 3 посредством паза 11 на муфте и гребня 12 на ведомом вале, что позволяет передавать вращение муфты ведомому валу при ее перемещении. В заднем положении шестигранное отверстие муфты надевается на шестигранный участок ведущего вала 13, и она фиксируется на валу постоянными магнитами заднего положения 14, закрепленными на муфте. В этом положении муфта связывает ведущий и ведомый валы и обеспечивает их совместное вращение.
Рис. 6.
Узлы инструмента с поворотом на 360°: (а) – узел переключения режимов; (б) – узел поворота ведущего вала.

При перестановке муфты в переднее крайнее положение шестигранный участок ведущего вала выходит из зацепления с шестигранным отверстием муфты, ведомый вал расцепляется с ведущим и может независимо поворачиваться вручную за диск муфты. Поворот ведомого вала ведет к повороту закрепленного на нем захвата.
Фиксация переключающей муфты в переднем положении осуществляется закрепленными на основании постоянными магнитами 15. Эти же магниты осуществляют фиксацию муфты, вала и, соответственно, захвата за счет высокого трения между закрепленными на рукояти-основании магнитами и стальным диском муфты. Фиксация муфты в заднем положении, когда ведущий и ведомый валы связаны, осуществляется постоянными магнитами 14, встроенными в муфту.
Для осуществления фиксированного поворота на 360° в обе стороны предназначен узел поворота ведущего вала, выполненный в виде зубчато-реечного механизма (рис. 6б).
В предыдущем случае для поворота захвата на 180° был использован механизм со спиральным пазом и пальцем. Но в данном случае требуется увеличение длины паза, и, следовательно, размера инструмента. Можно увеличить угол наклона паза, но это приведет к снижению надежности работы инструмента из-за повышенного трения. Поэтому для фиксированного поворота на 360° в обе стороны была выбрана зубчато-реечная передача, которая обеспечивает требуемый угол поворота инструмента и даже позволяет уменьшить его длину. Узел поворота ведущего (рис. 6) содержит подвижную каретку 16 поворота ведущего вала с рукоятью. Каретка с закрепленной на ней зубчатой рейкой 17 может вручную перемещаться в пазе основания. Взаимодействующее с рейкой зубчатое колесо 18 закреплено на ведущем валу 2. Перемещение подвижной каретки из одного крайнего положения в другое соответствует повороту ведущего вала на 360°.
Для поворота ведомого вала и связанного с ним захвата необходимо установить переключающую муфту в заднее положение, что обеспечивает связь обоих валов. При этом ручное вращение муфты нежелательно. Закрытие и раскрытие захвата осуществляется рычагом управления захватом 8. При нажатии рычага натяжение троса ведет к перемещению подвижной губки и закрытию захвата. Фиксация рычага управления производится подпружиненной защелкой и зубчатой гребенкой на рычаге 8 захвата, расфиксация производится ручным опусканием защелки. Для возврата подвижной губки 6 в открытое положение используются возвратная пружина 9, связанная с ней тросом, и два закрепленных на губках постоянных магнита 7.
Таким образом, инструмент позволяет захватить объект и зафиксировать его закрепление, обеспечивает поворот захвата на произвольный угол с фиксацией. Также возможен поворот на 360° в обе стороны. Эти дополнительные возможности позволяют облегчить работу хирурга при проведении эндоскопических операций и упростить вязание узлов.
Итак, в настоящей статье представлены новые инструменты, разработанные ИМАШ РАН совместно с ЦКБ РАН для оказания помощи хирургу при проведении операций. Эти инструменты позволяют облегчить выполнение такой распространенной задачи, как завязывание узлов при наложении швов. Разработанные устройства обладают дополнительными свойствами, расширяющими область их применения. В настоящее время разработки находятся на стадии экспериментальных образцов. Сотрудниками ИМАШ РАН при содействии ЦКБ РАН проводится исследование и совершенствование конструкции инструментов.
Список литературы
Хирургия малых пространств / Под общей редакцией В.Н. Егиева. М.: Медпрактика-М., 2002. 56 с.
Ганиев Р.Ф., Глазунов В.А., Филиппов Г.С. Актуальные проблемы машиноведения и пути их решения. Волновые и аддитивные технологии, станкостроение, роботохирургия // Проблемы машиностроения и надежности машин. 2018. № 5. С. 17.
Емельянов С.И., Феденко В.В., Матвеев Н.Л. Эндоскопическая хирургия: status praesens и перспективы // Эндоскопическая хирургия. 1995. № 1. С. 9.
Глушков П.С., Азимов Р.Х. Пациенту хирургического стационара: просто о сложном. Серия “Библиотека просветителя”. М.: Международный гуманитарный общественный фонд “Знание”, 2020. 228 с.
Rosen J., Hannaford B., Satava R.M. Surgical Robotics. Systems Applications and Visions. Springer / Science+Business Media, 2011. 843 p.
Rassweiler J., Autorino R., Klein J., Mottrie A. et al. Future of robotic surgery in urology // Robotics and Laparoscopy BJU Int. 2017. V. 120. P. 822.
Глазунов В.А., Гаврилина Л.В., Духов А.В., Ковалева Н.Л., Левин С.В. Разработка сферических роботов параллельной структуры для полостных операций // Медицина и высокие технологии. 2017. № 3. С. 62.
Гаврилина Л.В., Демидов С.М., Орлов И.А., Шалюхин К.А., Шарапов И.Б., Швец П.А. Разработка роботов параллельной структуры портального типа для ортопедических операций // Медицина и высокие технологии. 2017. № 3. С. 55.
Богданов А.Б., Велиев Е.И., Соколов Е.А., Метелёв А.Ю., Ивкин Е.В., Томилов А.А., Марченко В.В. Сравнительная оценка робот-ассистированной, открытой и лапароскопической резекции почки // Московская медицина. 2018. № 1. С. 51.
Велиев Е.И., Ганиев Р.Ф., Глазунов В.А., Филиппов Г.С. Перспективные малоинвазивные роботохирургические комплексы параллельной структуры // Доклады российской академии наук. Физика, технические науки. 2020. Т. 495. С. 84.
Robot-daVinci.ru
Инструменты и приборы для малоинвазивной хирургии / Под. ред. С.И. Емельянова, И.В. Федорова. СПб.: Человек, 2004. 145 с.
Тургунов Е.М., Нурбеков А.А. Хирургические инструменты. Учебное наглядное пособие. Караганда: Карагандинская государственная медицинская академия, 2008.
Горячева И.Г., Досаев М.З., Селюцкий Ю.Д. и др. Моделирование лапароскопического зажимного устройства с очувствлением // Мехатроника, автоматизация, управление. 2019. Т. 20. № 4. С. 206.
Горячева И.Г., Яковенко А.А. Задачи механики контактных взаимодействий при разработке зажимных медицинских инструментов // В сборнике: Проблемы динамики взаимодействия деформируемых сред. Труды IX международной конференции, 2018. С. 128.
https://evraz-med.ru
Ilewicz G., Wojnarowski J. Kinematics of Constant Point Mechanism of Cardiosurgical Telemanipulator // 13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19–25 June, 2011. P. 1.
Кузнецов Д.А., Кормин Т.Г., Мосейчук Е.И., Васильев А.Н. Гибкий робот – хобот слона. Современная наука: актуальные вопросы, достижения и инновации // Сб. III Международной научно-практической конференции. Пенза: Наука и Просвещение, 2018. С. 36.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин