

Проблемы машиностроения и надежности машин, 2023, № 3, стр. 78-88
Структурная адаптация программы контроля безопасности технического состояния сложной технической системы
А. В. Майструк 1, Е. Ю. Лушпа 2, М. Н. Ерофеев 3, *, В. В. Спирягин 2
1 Московский политехнический университет
Москва, Россия
2 Московский авиационный институт
Москва, Россия
3 Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
* E-mail: erofeevmn@imash.ru
Поступила в редакцию 14.12.2022
После доработки 24.01.2023
Принята к публикации 20.02.2023
- EDN: PQKUYG
- DOI: 10.31857/S0235711923030112
Аннотация
Представленные в статье подходы к разработке, оценке эффективности и целесообразности проведения контроля, постановки задач и их математические модели позволяют решить проблему синтеза адаптивных программ контроля безопасности технического состояния сложной технической системы.
Задачу структурной адаптации программ контроля технического состояния сложной технической системы (СТС), наиболее полно учитывающую целесообразность проведения определенного вида контроля, с одной стороны, и требованиями готовности к применению по назначению, с другой, можно решить на основе показателей достоверности и целесообразности контроля. В этом случае основным критерием оценки качества контроля является достоверность контроля, как показатель степени объективного отображения результатами контроля действительного технического состояния сложной технической системы. То есть другими словами достоверность контроля отражает степень доверия к решениям о состоянии системы, принятым по результатам контроля.
Рассмотрим некоторые подходы к оценке достоверности и целесообразности контроля сложных технических систем.
В качестве показателя достоверности контроля Dк безопасности СТС можно принять показатель, в виде отношения вероятности истинности безопасного технического состояния $P_{{{\text{бс}}}}^{{\text{и}}}$ к вероятности принятия решения о допуске проверяемой системы к применению по назначению (т.е. вероятность принятия безошибочного решения), как соответствующей требованиям безопасности, принятого по результатам контроля $Р_{{{\text{бс}}}}^{{\text{к}}}$ с учетом вероятности появления ошибок первого и второго рода, т.е.
При этом предполагается, что в качестве исходных данных известны следующие независимые параметры контроля: ${{Р}_{0}}$ – вероятность безопасного технического состояния СТС перед началом контроля; q – вероятность возникновения предпосылки к происшествию в процессе контроля, в результате опасного отказа или нарушения технологии обслуживающим персоналом; α – вероятность ошибки первого рода, т.е. вероятность ошибочного принятия решения об опасном техническом состоянии СТС; β – вероятность ошибки второго рода, т.е. вероятность допуска СТС к применению по назначению при наличии предпосылок к происшествиям; γ – вероятность, возникновения предпосылки к происшествиям (опасного отказа) на СТС на интервале времени с момента окончания контроля технического состояния к моменту применения по назначению.
Для анализа всех возможных исходов контроля технического состояния как сложного события удобно использовать “дерево вероятностей” в виде графа [1], в котором опыты (результаты принятых решений в процессе контроля) представлены вершинами, а каждый исход – ребром графа (линией). Вероятность соответствующего исхода указывается около ветви, а возможные исходы и вероятность всего сложного события – в конце каждой ветви.
В соответствии с этим на базе графа (рис. 1), характеризующего техническое состояние СТС и процесс принятия решений можно получить аналитические зависимости для определения показателя достоверности контроля.
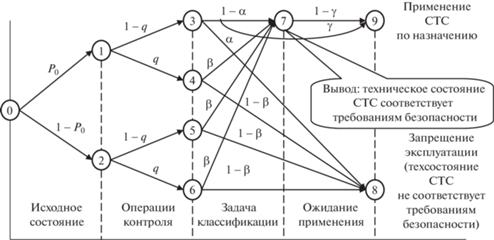
Из анализа приведенного графа и логичных рассуждений следует, что вероятность того, что СТС после проведения контроля действительно находится в безопасном состоянии, определяется выражением
Вероятность безопасного состояния СТС при применении по назначению, можно определить с помощью аналитической зависимости
Вероятность того, что техническое состояние СТС по результатам контроля будет признано безопасным, равна сумме вероятностей положительных исходов при принятии решений с учетом возможных состояний контролируемых систем и ошибок первого и второго рода
После несложных преобразований аналитическая зависимость $Р_{{{\text{бс}}}}^{{\text{к}}}$ приобретает вид
Тогда согласно определению показатель достоверности контроля можно представить соотношением
Значения показателя достоверности контроля безопасности СТС изменяются в пределах от 0 до 1. При этом если вероятность возникновения предпосылки к происшествию в процессе контроля, в результате опасного отказа или нарушения технологии обслуживающим персоналом q = 1 или вероятность ошибки первого рода α = 1, то Dк = 0, что соответствует полной неэффективности или недостоверности результатов контроля. Если же q = 0, α = 0 и вероятность ошибки второго рода β = 0, то Dк = 1, что указывает на полную достоверность, а значит и эффективность данного вида контроля.
Достоверность контроля технического состояния СТС при совместном применении нескольких методов контроля определяется по формуле
где ${{d}_{{ij}}}$ – достоверность контроля i-го СТС j-м методом контроля.Достоверность контроля совокупности СТС при условии независимости результатов контроля будет определяться как произведение показателей достоверности контроля каждого из контролируемых объектов
Однако при разработке адаптивной программы обеспечения безопасности эксплуатации СТС лицу, принимающему решения необходимо иметь информацию о целесообразности проведения того или иного вида контроля.
Очевидно, что в тех случаях, когда контроль вообще не проводится, вероятность безопасного состояния системы равна произведению вероятности ее безопасного состояния в момент времени принятия решения о целесообразности контроля и вероятности безопасного функционирования в последующий период, до применения по назначению. Следовательно, эту величину можно рассматривать как априорную вероятность нахождения СТС в безопасном состоянии при отсутствии контроля
Следуя логике, что контроль технического состояния СТС проводится с целью повышения уверенности лица, принимающего решение (ЛПР) в том, что на момент применения по назначению контролируемые системы и агрегаты будут находиться в безопасном состоянии, то его целесообразность будет определяться исходя из условия ${{D}_{{\text{к}}}}(1 - \gamma ) > Р_{{{\text{бс}}}}^{{{\text{бк}}}}$.
В этом случае, приняв допущение о независимости событий, характеризующих вероятности Р0, q, α, β, γ, получим аналитическое выражение для показателя целесообразности проведения контроля, которое имеет вид
Очевидно, что если ${{H}_{{{\text{цк}}}}} > 1$, то применение данного вида контроля позволяет повысить уверенность (снять неопределенность) в безопасном состоянии систем и агрегатов, а значит его включение в программу обеспечения безопасности эксплуатации СТС, безусловно, целесообразно. При значениях ${{H}_{{{\text{цк}}}}} < 1$ контроль снижает степень уверенности в безопасности СТС и его проведение является нецелесообразным.
С точки зрения практического применения для оценки целесообразности проведения j-го вида контроля безопасности технического состояния i-й системы, при заданных параметрах α j, β j и q j, весьма полезным и наглядным является график зависимости $H_{{{\text{цк}}}}^{{ij}} = f\left( {P_{0}^{i}} \right)$ (рис. 2а).
Рис. 2.
Графики зависимости $H_{{{\text{цк}}}}^{{ij}}$ = $f\left( {P_{0}^{i},{{\alpha }^{{ij}}},{{\beta }^{{ij}}},{{q}^{{ij}}}} \right)$: (а) – $H_{{{\text{цк}}}}^{{ij}}$ = $f\left( {P_{0}^{i}} \right)$; (б) – $H_{{{\text{цк}}}}^{{ij}}$ = $f\left( {{{q}^{{ij}}}} \right)$; (в) –$H_{{{\text{цк}}}}^{{ij}}$ = $f\left( {{{\alpha }^{{ij}}}} \right)$; (г) – $H_{{{\text{цк}}}}^{{ij}}$ = $f\left( {{{\alpha }^{{ij}}},{{\beta }^{{ij}}}} \right)$.
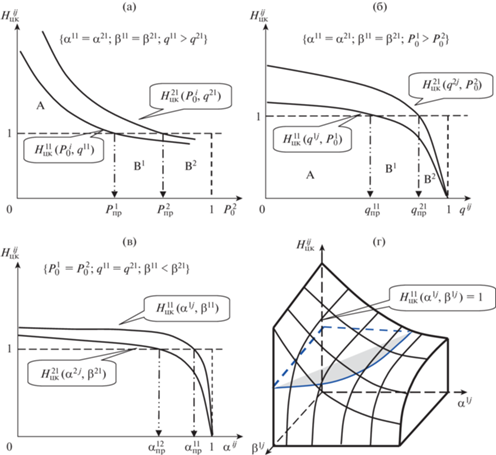
Из графика видно, что в зависимости от априорной вероятности безопасного состояния СТС к началу контроля, и при заданных значениях α j, β j и q j, которые зависят от применяемых контрольно-измерительных средств, алгоритмов контроля и уровня подготовки обслуживающего персонала, можно выделить две области: область А, где $H_{{{\text{цк}}}}^{{ij}} > 1$ и, следовательно, контроль целесообразен, и область В, где контроль не целесообразен, так как $H_{{{\text{цк}}}}^{{ij}} < 1$. Границей этих областей является значение вероятности безопасного состояния СТС $Р_{{{\text{пр}}}}^{{ij}}$, при котором $H_{{{\text{цк}}}}^{{ij}} = 1$. Следовательно, условие целесообразности контроля в зависимости от априорной информации о техническом состоянии системы можно записать в виде неравенства
В общем случае это условие можно трактовать следующим образом: чем больше вероятность опасного технического состояния систем и агрегатов, тем целесообразнее их контроль перед применением по назначению.
Аналогичные графики можно построить для определения граничных значений других переменных (рис. 2б, в, г). Например, $H_{{{\text{цк}}}}^{{ij}} = f\left( {{{q}^{{ij}}}} \right)$ при фиксированных значениях $P_{0}^{i}$, ${{\alpha }^{j}}$ и ${{\beta }^{j}}$. При этом условие целесообразности контроля i-й системы ($P_{0}^{i}$), в зависимости от уровня подготовки обслуживающего персонала ${{q}^{{ij}}}$ и параметров j-го вида контроля (${{\alpha }^{j}},\;{{\beta }^{j}}$), можно представить в виде
Однако, для сложных систем с высокой степенью прогнозируемого ущерба, в результате происшествий (аварий, катастроф), показатель целесообразности контроля должен учитывать показатели риска [2]. Так как отказ от контроля может привести к тому, что к эксплуатации будут допущены системы и агрегаты, техническое состояние которых не соответствует требованиям безопасности. При этом в результате происшествий будет нанесен материальный ущерб окружающей среде и не выполнена поставленная задача. С другой стороны, отказ от контроля уменьшает эксплуатационные расходы на величину стоимости контроля и повышает готовность систем и агрегатов за счет уменьшения времени подготовки (обслуживания). Увеличение готовности можно оценить некоторым стоимостным эквивалентом.
В этом случае показатель целесообразности контроля можно представить в виде
(1)
$H_{{{\text{цк}}}}^{{ij}} = \frac{{\left( {1 - P_{{{\text{бэ}}}}^{{ij}}} \right)С_{{{\text{ущ}}}}^{i}}}{{С_{{\text{к}}}^{{ij}} + \Delta C_{{{\text{ув}}}}^{{ij}}}},$При этом числитель выражения (1) представляет собой не что иное, как показатель риска, т.е. меру опасности, характеризующую как возможность возникновения ущерба, так и его вероятные размеры.
В этом случае если $H_{{{\text{цк}}}}^{{ij}} > 1$, то возможный ущерб, в результате аварий и катастроф, значителен и не окупается уменьшением эксплуатационных расходов и увеличением готовности (стоимости дополнительно выполненных работ) при отказе от контроля. Следовательно, контроль перед применением по назначению экономически целесообразен. Если же $H_{{{\text{цк}}}}^{{ij}} < 1$, то экономически более выгодно данный вид контроля технического состояния систем и агрегатов не проводить.
Исходя из этого можно сделать вывод, что представленные показатели достоверности и целесообразности проведения контроля технического состояния сложных систем можно использовать при синтезе адаптивных программ контроля безопасности эксплуатации СТС [3] только при условии независимости параметров Р0, α, β, γ и безусловных алгоритмах контроля. То есть в алгоритмах контроля, в которых последовательность элементарных проверок не зависит от предыдущих результатов, так как очередность проверок не имеет существенного значения и определяется в основном техническими возможностями системы (особенностями программы) контроля.
Алгоритмы контроля, в которых результат очередной элементарной проверки анализируется сразу же после ее выполнения и решение о выполнении следующего вида проверки формируется в зависимости от результатов предшествующих проверок, называются условными алгоритмами контроля. При этом множество реализуемых проверок $G{\text{*}}$ в сочетании с правилами, определяющими порядок их проведения, образуют программу контроля. Выбором различных проверок {gi} ∈ G, характеризующихся своими показателями эффективности и ресурсоемкости, можно в какой-то мере влиять на значения показателя эффективности программы контроля в целом, т.е. обеспечить ее гибкость и целеустремленность за счет оптимизации выбранного множества элементарных проверок. В частности анализ различных методов контроля параметров, определяющих безопасность эксплуатации СТС [4–6], подтверждает целесообразность применения на практике комплексных программ, которые реализуют разные по физической природе методы, что позволяет нивелировать недостатки одного метода, взаимодополнить один метод другим, и, обеспечить, тем самым, принцип “избыточности” при контроле технического состояния систем и агрегатов. Что в целом позволяет повысить достоверность контроля, а значит и безопасность эксплуатации СТС.
В условных алгоритмах контроля, заранее неизвестно, какая из m ветвей адаптивной программы будет реализована в процессе контроля, т.к. система может находиться в любом из m технических состояний с априорной вероятностью $P({{z}_{i}})$, где $i = \overline {1,m} $. Другими словами, выбор i-й ветви программы контроля является случайным событием, зависящим от случайности процесса пребывания системы в i-м техническом состоянии. Очевидно, что вероятностью этого события является априорная вероятность $P({{z}_{i}})$. Поэтому для оценки достоверности всей условной программы контроля, состоящей из m ветвей (подпрограмм), следует использовать средневзвешенную вероятность $P\left( {{{E}_{i}}{\text{/}}E_{i}^{*}} \right)$, получаемую на основании формулы Байеса, как математическое ожидание величины ${{D}_{i}}$ по формуле
(2)
$D = M\{ {{D}_{i}}\} = \bar {P}\left( {{{E}_{i}}{\text{/}}E_{i}^{*}} \right) = \sum\limits_{i = 1}^m {P({{z}_{i}})P\left( {{{E}_{i}}{\text{/}}E_{i}^{*}} \right)} ,$В физическом смысле вероятность $P\left( {{{E}_{i}}{\text{/}}E_{i}^{*}} \right)$ представляет собой апостериорную вероятность i-го технического состояния системы, полученную в результате контроля, при котором реализуется i-я ветвь выбранной программы, т.е. выполняются элементарные проверки, входящие во множество ${{G}_{i}}$ ($i = \overline {1,\;m} $). При этом естественно, что вероятность $P\left( {{{E}_{i}}{\text{/}}E_{i}^{*}} \right)$ зависит от того, какие проверки входят во множество ${{G}_{i}}$, сколько их и какова их точность.
В качестве ресурсных показателей, связанных с реализацией программы контроля, можно использовать математическое ожидание временных и финансовых затрат на распознавание технического состояния системы по синтезируемой программе
(3)
$\bar {T} = \sum\limits_{i = 1}^m {P({{z}_{i}})\sum\limits_{{{g}_{j}} \in {{G}_{i}}}^{} {\tau ({{g}_{j}})} } ,\quad \bar {C} = \sum\limits_{i = 1}^m {P({{z}_{i}})\sum\limits_{{{g}_{j}} \in {{G}_{i}}}^{} {c({{g}_{j}})} } ,$Под продолжительностью контроля понимается время, затрачиваемое на контроль заданной совокупности параметров в реальных условиях эксплуатации. Время контроля ${{\hat {\tau }}_{k}}$ является случайной величиной и характеризуется плотностью распределения ${{\varphi }_{{{{{\hat {\tau }}}_{k}}}}}({{\tau }_{k}})$. На практике в качестве временного показателя, характеризующего процесс контроля, используется математическое ожидание или среднее время контроля
В свою очередь продолжительность программ контроля зависит от применяемых методов и полноты (глубины) контроля сложных систем. Показатель полноты контроля i-й системы $L_{{{\text{пк}}}}^{i}$ можно определить как отношение контролируемых параметров Lк (элементов структурной схемы безопасности) к общему числу параметров (элементов ССБ) LΣ, определяющих их работоспособность (безопасность)
Следовательно, выбором различных проверок ${{g}_{i}} \in G$, можно в какой-то мере влиять на изменение как показателя достоверности условной программы контроля так и на ресурсы требуемые для ее реализации (временные, материальные, стоимостные и т.п.). Если же при этом удалось получить оптимальные значения, то выбранную совокупность проверок можно считать наилучшей.
Оптимизацию процесса контроля по показателям (2) и (3) можно выполнить методом динамического программирования [7, 8]. Идея метода заключается в том, что отыскание точек оптимального решения целевой функции многих переменных заменяют многократным поиском точек экстремума одной переменной или небольшого числа переменных. Для этого необходимо найти такие выражения, которые позволяли бы оценивать эффективность процесса контроля, начинающегося не только с начального информационного состояния ${{Z}_{0}}$, но и с любого другого (промежуточного) информационного состояния ${{S}_{k}} \subset Z$. Так как реализация подпрограммы контроля может начинаться с любой проверки ${{g}_{i}} \in {{G}_{k}}$, разрешенной в информационном состоянии ${{S}_{k}} \subset Z$, то соответственно, и показатели ${{S}_{k}}$ – подпрограммы зависят от того, какая проверка будет выполнена. Следовательно, формулу для оценки достоверности ${{S}_{k}}$подпрограммы можно записать в виде
С учетом введенных обозначений формулы для оценки средних затрат и времени реализации ${{S}_{k}}$ подпрограммы, начинающейся с ${{g}_{j}}$ проверки, можем записать в виде
С помощью представленных формул можно определить оптимальную проверку в любом из рассматриваемых информационных состояний ${{S}_{k}} \subseteq Z$. Так как, согласно принцип оптимальности Беллмана, выбираемая в данном информационном состоянии ${{S}_{k}}$ проверка должна быть оптимальной относительно этого состояния вне зависимости от того, каковы были предшествующие состояние и проверка, выбранная в нем. Такой метод формирования программы контроля технического состояния устанавливает непосредственную зависимость между показателями эффективности и выбираемой на каждом шаге проверкой. При этом сам процесс выбора проверок является рекуррентным, поскольку нa каждом шаге выбора используются результаты расчетов, полученные на предыдущих шагах.
Таким образом, процесс формирования адаптивной программы обеспечения безопасности эксплуатации (ПОБЭ) СТС с учетом планов их применения предполагает решение частных задач оптимизации программ контроля технического состояния, по одному из критериев
В общем случае, выбор стратегии применения различных методов контроля, как одного из мероприятий по обеспечению безопасности эксплуатации сложных систем, должен основываться на стремлении, с одной стороны, повысить (обеспечить требуемую) достоверность результатов контроля технического состояния (безопасного состояния СТС) и, с другой стороны, снизить затраты (время) на его проведение.
При этом вербальную постановку одной из задач оптимизации можно сформулировать следующим образом: необходимо найти такую программу (стратегию) контроля технического состояния СТС, которая обеспечит требуемый уровень достоверности контроля из условия минимальных суммарных расходов на его реализацию.
Математическая постановка задачи имеет вид
(5)
${{D}_{{\text{к}}}}\left( U \right) \geqslant D_{{\text{к}}}^{{{\text{тр}}}},\quad U \in \left\{ {{{U}_{{\text{Д}}}}} \right\},$Наряду с критерием минимальной стоимости можно использовать двойственный критерий обеспечения максимальной достоверности контроля
(7)
${{C}_{{\text{к}}}}\left( U \right) \leqslant C_{{\text{к}}}^{{{\text{выд}}}},\quad U \in \left\{ {{{U}_{{\text{Д}}}}} \right\},$Математическая постановка задачи минимизации времени контроля технического состояния группы образцов вооружения при ограничениях на суммарную стоимость реализации программы, и достоверность результатов контроля будет иметь вид
(8)
$T_{{\text{к}}}^{\Sigma }(U) \to \mathop {\min }\limits_U ;\quad D_{{\text{к}}}^{i}(U) \geqslant D_{{\text{к}}}^{{{\text{тр}}}};$(9)
$\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^m {C_{{\text{к}}}^{{ij}}} } (U) \leqslant C_{{\text{к}}}^{\Sigma };\quad U \in \left\{ {{{U}_{{\text{Д}}}}} \right\},$Возможны постановки задачи, когда необходимо минимизировать математическое ожидание от суммы начальной стоимости (величины капитальных вложений в средства контроля) и расходов, связанных с их реализацией (программой обеспечения безопасности СТС), включая стоимость ущерба в результате происшествия из-за неэффективности принятой программы контроля.
В этом случае математическая постановка задачи имеет вид
(10)
$C_{{\text{к}}}^{{}}\left( U \right) + \left[ {1 --{{P}_{{{\text{БЭ}}}}}\left( U \right)} \right]C_{{}}^{y}\left( U \right) \to \mathop {\min }\limits_U ;$(11)
${{D}_{{\text{к}}}}\left( U \right) \geqslant D_{{\text{к}}}^{{{\text{тр}}}};\quad U \in \left\{ {U{}_{{\text{Д}}}} \right\},$Представленная модель допускает учет расходов, связанных с диагностированием, профилактикой аварийных отказов, повторными отказами, ремонтом, восстановлением, обучением обслуживающего персонала и т.п.
В то же время отметим, что при учете фактора времени достоверность контроля и его нормативное значение становятся функциями времени, а целевая функция – функционалом от вероятности безопасности эксплуатации СТС ${{P}_{{{\text{БЭ}}}}}\left( t \right)$.
Если возникает необходимость различать опасные (аварийные, катастрофические) отказы по степени наносимого ущерба, то задача приобретает вид
(12)
${{C}_{0}}\left( U \right) + \sum\limits_a {{{Q}_{a}}\left( {{{U}_{a}},t} \right){{C}_{a}}\left( {{{U}_{a}},t} \right)} \to \mathop {\min }\limits_a ;$(13)
$D\left( {{{U}_{a}},\tau } \right) \geqslant D_{K}^{{тр}};\quad U \in \left\{ {{{U}_{{\text{Д}}}}} \right\};\quad \tau \in \left[ {0,{{T}_{{\text{Э}}}}} \right],$В общем случае представленные задачи оптимизации (4)–(13) относятся к классу задач нелинейного программирования [9, 10] и, вообще говоря, являются многоэкстремальными.
Таким образом, одним из направлений обеспечения требуемого уровня безопасности эксплуатации СТС является прогнозирование индивидуальных показателей технического состояния, и принятие упреждающих мер по обеспечению приемлемого (требуемого) значения показателя риска на основе адаптивных программ контроля. При этом программы контроля технического состояния потенциально опасных объектов должны быть индивидуальными и учитывать не только конкретные условия их применения по назначению, но и условия обслуживания, хранения и транспортирования, а также специфические особенности составных частей, зависящие, в частности, как от конкретных условий изготовления, так и от остаточного ресурса.
Заключение. Представленные методические подходы к разработке, оценке эффективности и целесообразности проведения контроля, постановки задач и их математические модели позволяют решить проблему синтеза адаптивных программ контроля безопасности технического состояния СТС путем: 1) структурно-функциональной оптимизации программ контроля за изменением технического состояния систем и агрегатов; 2) оценки эффективности отдельных методов контроля и формирования программ с учетом ситуационных целевых требований; 3) определения оптимального объема контрольно-профилактических и ремонтно-восстановительных работ (мероприятий обеспечения безопасности эксплуатации), а также сроков их проведения с учетом технического состояния контролируемых систем.
Список литературы
Майструк А.В., Лушпа Е.Ю., Разумова Ю.Е. Граф-модель оптимизации периодичности контроля сложных технических систем менеджментом предприятия на этапе реализации проекта / Под ред. О.В. Таратынова, Е.А. Резчикова // Технология, экономика и организация производства технических систем. Межвузовский сборник трудов М.: МГИУ, 2012.
Рябинин И.А. Безопасность и математическая логика // Моделирование и анализ безопасности, риска и качества в сложных системах: Труды международной научной школы МА БРК-2003. СПб.: Изд-во СПбГУАП, 2003.
Беркетов Г.А., Блаженков В.В., Кравец Л.И., Оселедец В.И. Современные математические методы анализа и синтеза сложных систем. Учеб. для вузов / Под ред. В.В. Блаженкова. М.: МО СССР, 1984. 400 с.
Нуриев М.Н., Сейдалиев И.М. Анализ методов контроля параметров качества намотки в текстильной промышленности, основанных на измерении эксперимента // Бюллетень науки и практики. 2016. № 7 (8). С. 48. https://doi.org/10.5281/zenodo.58088
Равин А.А. Диагностическое обеспечение судового энергетического оборудования: Дис. … док. техн. наук. Автореферат. СПб.: С.-Петерб. гос. мор. техн. ун-т, 2016. 22 с.
Severtsev N.A., Thuong N.K. Methodological approach to the system assessment of the danger and safety of complex technical systems // Science Intensive Technologies. 2021. V. 22. № 5. P. 22 (in Russian).https://doi.org/10.18127/j19998465-202105-03
Izadkhah H. Problems on Algorithms: A Comprehensive Exercise Book for Students in Software Engineering. Springer, Cham, 2022. P. 401. https://doi.org/10.1007/978-3-031-17043-0_11
Huang Zh., Ma J., Huang H. An approximate dynamic programming method for multi-input multi-output nonlinear system // Optimal Control Applications and Methods. 2011. V. 34 (1). P. 80. https://doi.org/10.1002/oca.1031
Ng X. Non-linear Programming Problems with Constraints and Euler’s Methods // Concise Guide to Optimization Models and Methods. Springer, Cham, 2022. https://doi.org/10.1007/978-3-030-84417-2_2.
Середа А.-В.И. Методы решения задач нелинейного программирования: Уч. пособие. Мурманск: Изд-во МГТУ, 2012. 130 с.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин