

Проблемы машиностроения и надежности машин, 2023, № 6, стр. 54-61
СТРУКТУРА, КИНЕМАТИКА И ПРОТОТИПИРОВАНИЕ ПАРАЛЛЕЛЬНОГО МАНИПУЛЯТОРА С УДАЛЕННЫМ ЦЕНТРОМ ВРАЩЕНИЯ
В. А. Глазунов a, П. А. Ларюшкин a, b, *, К. А. Шалюхин a
a Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
b Московский государственный технический университет им. Н.Э. Баумана
(национальный исследовательский университет)
Москва, Россия
* E-mail: pav.and.lar@gmail.com
Поступила в редакцию 18.06.2023
После доработки 02.08.2023
Принята к публикации 20.08.2023
- EDN: EEZOEA
- DOI: 10.31857/S0235711923060081
Аннотация
В статье рассмотрен механизм с удаленным центром вращения, предназначенный для применения в медицине, и в частности, минимально инвазивных операциях. Базовый механизм состоит из двух параллелограммов с общими звеньями, что позволяет хирургическому инструменту дублировать движение приводного звена механизма. Для обеспечения большей жесткости механизма предложено ввести приводную избыточность за счет использования дополнительной диады RRR с приводной парой. Для полученного механизма решена задача о положениях. Также представлены трехмерная модель и прототип механизма.
Одной из важных областей применения механизмов параллельной структуры является медицина, что обусловлено такими качествами подобных механизмов, как более высокая точность позиционирования и жесткость по сравнению с механизмами с последовательной структурой. Наиболее часто механизмы такого типа применяются в хирургии, в частности нейрохирургии и минимально‑инвазивной абдоминальной хирургии [1, 2]. При этом могут использоваться различные структурные схемы механизмов, однако наибольшее распространение получили устройства с удаленным центром вращения. В этих механизмах выходное звено (чаще всего – хирургический инструмент) совершает вращение вокруг постоянной точки, а промежуточные звенья всегда находятся на некотором удалении от этой точки. Такая особенность обусловлена тем, что упомянутая точка, как правило, является местом прокола или разреза, в котором инструмент вводится в тело пациента. Двумя основными типами механизмов с удаленным центром вращения являются сферические и плоские механизмы.
Сферические механизмы представляют собой устройства, обладающие, как правило, тремя степенями свободы. В подавляющем большинстве случаев такие механизмы являются пространственными, т.е. их звенья не находятся в одной плоскости. В качестве примеров медицинских сферических механизмов можно привести робот CoBRASurge [3] с классической структурой, включающей дуговые звенья, предназначенный для малоинвазивных операций, а также робот ESTELE [4] с похожей структурой, основное назначение которого – роботизированное ультразвуковое исследование абдоминальной области.
Плоские механизмы, звенья которых лежат в одной плоскости, также могут использовать дуговые элементы, как, например, это сделано в роботах SASSU [5] и Probot [6]. Однако наиболее распространенными являются механизмы с пантографами, в которых движение приводного звена (кривошипа) копируется инструментом. Примерами могут служить робот LARS [7], являющийся одним из первых представителей подобных устройств, и робот BlueDragon [8], в котором используется несколько пантографов, каждый из которых управляет отдельным инструментом. Основным недостатком таких механизмов является относительно низкая жесткость, что для медицинского оборудования является недопустимым [9]. В настоящей статье предлагается возможный вариант решения такой проблемы за счет введения дополнительной приводной избыточности в плоский механизм с пантографом.
Базовый механизм. Для начала рассмотрим базовое исполнение механизма (рис. 1).
Рис. 1.
Механизм с удаленным центром вращения: схема механизма (а) шарнирный четырехзвенник в составе механизма (б).
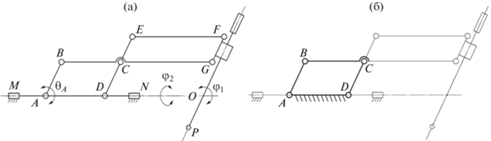
Основной частью механизма является пара плоских параллелограммов ABCD и CEFG. В каждой точке располагается вращательный шарнир. При этом звено CD первого параллелограмма и звено второго параллелограмма CE представляют собой две части физически единого звена DE. Аналогично звенья BC и CG являются частями единого звена BG. На звене FG закреплен инструмент, ось которого параллельна данному звену. Воспользовавшись известной формулой Чебышева, можно увидеть, что подвижность рассматриваемого механизма будет равна единице
где n – число подвижных звеньев механизма; p5 – число одноподвижных кинематических пар (пар 5-го класса); p4 – число двухподвижных кинематических пар (пар 4-го класса).Кинематическая структура механизма обеспечивает синхронное движение звеньев AB, DE, FG и, соответственно, инструмента. Иными словами, вращение приводной кинематической пары А приводит к повороту инструмента вокруг точки O. При этом угол поворота входного звена θA будет равен углу поворота инструмента φ1. В свою очередь звено AD расположено на поворотной оси MN, что дает механизму вторую степень свободы – возможность вращения вокруг оси, характеризуемого углом φ2. Таким образом, рассматриваемый механизм имеет две вращательных степени свободы. При этом центр вращения расположен в точке O и удален от непосредственно звеньев механизма: через данную точку в процессе работы проходит только инструмент. Перемещение инструмента вдоль собственной оси, а также его вращение вокруг этой оси может осуществляться вручную, либо с помощью отдельных приводов и в рамках настоящей статьи не рассматривается.
Можно легко видеть, что в основе механизма, по сути, лежит шарнирный четырехзвенник ABCD (рис. 1б). Такой механизм является простейшим представителем класса механизмов параллельной структуры, которому присущи достоинства и недостатки подобных механизмов. Одним из главных таких недостатков является наличие так называемых особых положений (сингулярностей), при попадании в которые, механизм теряет степень свободы или управление [10, 11]. При этом шарнирный четырехзвенник, как было показано Д. Златановым [12], может попадать в особые положения, характеризующиеся вырождением связей [13].
Негативные эффекты, заключающиеся в снижении точности позиционирования, потере жесткости, увеличении нагрузки на приводы и конструктивные элементы механизма, как правило, начинают проявляться при приближении к особым положениям [14, 15], что уменьшает реальную рабочую зону механизма. Поскольку для рассматриваемого механизма в качестве основной области применения предлагается медицина, а именно манипулирование хирургическими инструментами, очевидной становится недопустимость возникновения перечисленных явлений, поскольку каждое из них может привести к травме или создать угрозу жизни пациента.
Одним из способов борьбы с особыми положениями является введение в механизм избыточности, заключающейся в использовании только дополнительных приводов (приводная избыточность), либо дополнительных приводов в паре со вспомогательной подвижностью (кинематическая избыточность). Легко видеть, что появление дополнительной подвижности в рассматриваемом механизме привело бы к изменению структуры и, соответственно, потере синхронности движения приводного звена AB и инструмента. Из этого следует, что наиболее рациональным решением в данном случае было бы использование приводной избыточности.
Модифицированный механизм с приводной избыточностью. Наиболее простым способом введения приводной избыточности является замена любой пассивной кинематической пары на приводную. В рассматриваемом механизме наиболее рациональной представляется замена кинематической пары D, поскольку эта пара расположена на основании механизма, а значит ее физический привод (электродвигатель) можно удобно расположить там же. Это позволяет не увеличивать массу подвижных частей механизма и нагрузку на них, поскольку нет необходимости перемещать привод в процессе работы. В то же время можно видеть, что геометрия рассматриваемого механизма далеко не оптимальна с точки зрения обеспечения его жесткости. Действительно, удаление центра обеспечивается “вытянутой” геометрией механизма, являющегося, по сути, консольной балкой с заделкой по звену AD. Уменьшение консоли позволило бы потенциально повысить жесткость механизма без увеличения сечения и, как следствие, массы подвижных звеньев.
Для решения обозначенной проблемы целесообразно добавить в механизм простейшую структурную группу Ассура с приводной кинематической парой. При этом место присоединения такой группы к механизму должно быть, с одной стороны, максимально близким к инструменту, а с другой – не сильно увеличивать габариты механизма, поскольку поворот вокруг оси MN, в любом случае, будет осуществляться для всей конструкции. В качестве такого решения в настоящей статье предлагается использовать дополнительную диаду RRR (R – обозначает вращательный шарнир), присоединенную к точке Е (рис. 2а).
Рис. 2.
Механизм с дополнительной диадой: схема механизма (а) новый шарнирный четырехзвенник в составе механизма (б).
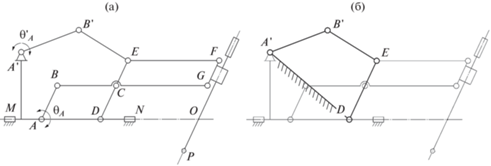
Дополнительная диада A'B'E располагается в задней части механизма и не препятствует функционированию его основной рабочей части (параллелограмму CEFG). При этом приводная пара A' расположена на основании механизма. Стоит заметить, что в точке E соединяются три звена: B'E, DE и EF, поэтому теоретически в данной точке расположены две одноподвижных пары. С учетом этого, для модифицированного механизма структурная формула Чебышева будет иметь вид
Введение дополнительной диады RRR позволило создать в структуре механизма дополнительный контур A'B'ED, представляющий собой, по сути, еще один шарнирный четырехзвенник (рис. 2б).
Поскольку звено DE движется синхронно звену АВ, в рассматриваемом четырехвезннике его можно считать приводным. Поскольку звено A'B' также является приводным, очевидна приводная избыточность механизма. При этом положение точки Е зависит от углов поворота двух приводных звеньев, а не одного, как в случае базового механизма, что потенциально делает механизм с диадой в целом более жестким.
Перейдем к решению задачи о положениях. Поскольку, отмечено что углы θA и φ1 равны, задача будет заключаться в вычислении угла $\theta _{A}^{'}$ по заданному значению θA или φ1. При этом расчетную схему для решения задачи можно упросить, рассматривая только шарнирный четырехзвенник A'B'ED (рис. 3).

Координаты точки E определяются длиной lDE звена DE и углом θA
(1)
$\begin{gathered} {{x}_{E}} = {{x}_{D}} + {{l}_{{DE}}}{\text{cos}}{{\theta }_{A}}, \\ {{y}_{E}} = {{y}_{D}} + {{l}_{{DE}}}{\text{sin}}{{\theta }_{A}}, \\ \end{gathered} $Координаты точки В' можно аналогичным образом выразить через координаты точки A' и длину lA'B' звена A'B', а также угол $\theta _{A}^{'}$.
(2)
$\begin{gathered} {{x}_{{B{\kern 1pt} '}}} = {{x}_{{A{\kern 1pt} '}}} + {{l}_{{A{\kern 1pt} 'B{\kern 1pt} '}}}\cos \theta _{A}^{'}, \\ {{y}_{{B{\kern 1pt} '}}} = {{y}_{{A{\kern 1pt} '}}} + {{l}_{{A{\kern 1pt} 'B{\kern 1pt} '}}}\sin \theta _{A}^{'}. \\ \end{gathered} $Используя выражения (1) и (2), а также постоянство длины lB'Е звена В'E можно записать уравнение связи
(3)
${{({{x}_{D}} + {{l}_{{DE}}}\cos {{\theta }_{A}} - {{x}_{{A{\kern 1pt} '}}} - {{l}_{{A{\kern 1pt} 'B{\kern 1pt} '}}}\cos \theta _{A}^{'})}^{2}} + {{({{y}_{D}} + {{l}_{{DE}}}\sin {{\theta }_{A}} - {{y}_{{A{\kern 1pt} '}}} - {{l}_{{A{\kern 1pt} 'B{\kern 1pt} '}}}\sin \theta _{A}^{'})}^{2}} = l_{{B{\kern 1pt} 'E}}^{2}.$В неособом положении уравнение (3) будет иметь два решения, которые можно получить аналитически [16]. При этом, очевидно, более предпочтительным будет решение, при котором точка B ' расположена выше, что уменьшает риск интерференции звеньев A'B' и B'E и параллелограмма ABCD.
Расположение точки A', а также длины lA'B' и lB'E определяют допустимые углы поворота звена DE, и, как следствие инструмента. Для того, чтобы угол поворота был теоретически неограничен, должно выполняться следующее условие для φ1:
(4)
${{l}_{{A{\kern 1pt} 'B{\kern 1pt} '}}} + {{l}_{{B{\kern 1pt} 'E}}} \geqslant {{l}_{{DE}}} + {{l}_{{AD}}}.$На практике необходимость в неограниченном повороте инструмента может отсутствовать, т.к. имеется возможность наклона всего механизма в противоположную сторону за счет изменения угла φ2. Поэтому условие (4) не является обязательным в реальном устройстве.
Компьютерное моделирование механизма. Одним из важных этапов разработки реального устройства является компьютерное моделирование конструкции. Помимо того, что такая модель служит отправной точкой для создания конструкторской документации, необходимой для изготовления изделия, моделирование в CAD позволяет оценить ряд важных параметров, таких как размеры рабочей зоны с учетом конструктивных ограничений, нагрузки на приводы и т.п. Для дальнейшей проработки были созданы модели базового механизма (рис. 4а) и механизма с приводной избыточностью (рис. 4б).

После первичной проработки был создан действующий прототип базового механизма для проверки основных конструктивных решений и отработки системы управления. При этом конструкция была несколько изменена и для приводов были использованы ременные передачи. Кроме того, была осуществлена балансировка механизма (рис. 5).

Для управления механизмом разработан ряд четырехкоординатных задатчиков движения. Один из них, для применения в хирургии, имитирует лапароскоп (рис. 6а). На выходе задатчика – четыре аналоговых сигнала, пропорциональных отклонению рукоятки от нейтрального положения.

Возможность освобождения рук оператора обеспечивает педальный задатчик движения (рис. 6б). Четыре педальных выключателя на платформе позволяют оператору, работать стоя, или в сидячем положении, поставив ноги на платформу, ее конструкция дает возможность стоять на платформе, не нажимая ни на одну из педалей. Управление четырьмя реверсивными приводами осуществляется за счет выбора сочетания нажатых педалей. При этом настройку указанных сочетаний можно выполнить индивидуально.
Механизм предполагается использовать в качестве альтернативы системы Soloassist, выпускаемой немецкой компанией ActorMed [17], назначение которой – управление эндоскопической камерой при малоинвазивных операциях.
Заключение. В настоящей статье рассмотрен механизм с удаленным центром вращения, основной частью которого является плоский пантограф. Показано, что такой механизм можно рассмотреть в качестве шарнирного четырехзвенника. Плоские механизмы с удаленным центром вращения, как правило, имеют относительно низкую жесткость. Для решения поставленной задачи предложено ввести в механизм приводную избыточность за счет использования дополнительной приводной диады RRR. Добавление диады формирует дополнительный контур, эквивалентный четырехзвенному механизму с двумя приводными звеньями. Для такого механизма показано решение задачи о положениях. Базовый и модифицированный механизм смоделированы в CAD. Кроме того, представлен прототип базового механизма с ременными передачами, для которого выполнена балансировка.
Финансирование. Исследование выполнено за счет гранта Российского научного фонда № 23-29-00789, https://rscf.ru/project/23-29-00789/
Конфликт интересов. Авторы заявляют, что у них нет конфликта интересов.
Список литературы
Kuo C.-H., Dai J.S., Dasgupta P. Kinematic Design Considerations for Minimally Invasive Surgical Robots: An Overview // Int. J. of Medical Robotics and Computer Assisted Surgery. 2012. № 8. P. 127.
Essomba T., Nguyen Vu L., Wu C. Optimization of a Spherical Decoupled Mechanism for Neuro-Endoscopy Based on Experimental Kinematic Data // J. of Mechanics. 2020. № 36 (1). P. 133.
Zhang X., Lehman A., Nelson C.A., Farritor S.M., Oleynikov D. Cooperative robotic assistant for laparoscopic surgery: CoBRASurge // Proceeding of IEEE/RSJ International Conference on Intelligent Robots and Systems. 2009. P. 5540.
Arbeille P., Ayoub J., Kieffer V., Ruiz P., Combes B., Coitrieux A., Herve P., Garnier S., Leportz B., Lefbvre E., Perrotin F. Realtime tele-operated abdominal and fetal echography in 4 medical centers from one expert center using a robotic arm & ISDN or satellite link // Proceedings of IEEE Int. Conf. on Automation Quality and Testing Robotics. 2008. № 1. P. 45.
Ramrath L., Hofmann U.G., Schweikard A. Spherical Assistant for Stereotactic Surgery // Int. Conf. on Intelligent Robots and Systems. 2007. P. 859.
Harris S.J., Arambula-Cosio F., Mei Q., Hibberd R.D., Davies B.L., Wickham J.E.A., Nathan M.S., Kundu B. The Probot – an active robot for prostate resection // Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine. 1997. № 211 (4). P. 317.
Taylor R.H., Funda J., Larose D., Treat M. A telerobotic system for augmentation of endoscopic surgery // Proceedings of IEEE Engineering in Medicine and Biology Society. 1992. V. 3. P. 1054.
Rosen J., Brown J.D., Chang L., Barreca M., Sinanan M., Hannaford B. The BlueDRAGON – A System for Measuring the Kinematics and the Dynamics of Minimally Invasive Surgical Tools In-Vivo // Proceedings of IEEE International Conference on Robotics and Automation. 2002. V. 2. P. 1876.
Zong G., Pei V., Yu J., Bi S. Classification and Type Synthesis of 1-DOF Remote Center of Motion Mechanisms // Mechanism and Machine Theory. 2008. № 43 (12). P. 1585.
Liu G., Lou Y., Li Z. Singularities of Parallel Manipulators: A Geometric Treatment // IEEE Transactions on Robotics and Automation. 2003. V. 19 (4). P. 579.
Gosselin C.M., Angeles J. Singularity analysis of closed-loop kinematic chains // IEEE Transactions on Robotics and Automation. 1990. V. 6 (3). P. 281.
Zlatanov D., Bonev I.A., Gosselin C.M. Constraint Singularities as C-Space Singularities // 8th Int. Symposium on Advances in Robot Kinematics (ARK 2002), 2002. P. 183.
Zlatanov D., Bonev I., Gosselin C.M. Constraint singularities of parallel mechanisms // Proceedings of the 2002 IEEE Int. Conf. on Robotics and Automation. 2002. V. 1. P. 496.
Laryushkin P.A. Experimental Study of Force Transfer in a Delta-Type Mechanism with Four Degrees of Freedom // J. of Machinery Manufacture and Reliability. 2021. V. 50 (5). P. 379.
Laryushkin P.A., Glazunov V.A. On the Estimation of Closeness to Singularity for Parallel Mechanisms Using Generalized Velocities and Reactions // 14th Int. Federation for the Promotion of Mechanism and Machine Science World Congress, IFToMM, 2015. 127160.
Staciu S. Kinematics of the 3-RRR planar parallel robot // UPB Scientific Bulletin, Series D: Mechanical Engineering. 2008. № 70 (2). P. 3.
Ohmura Y., Nakagawa M., Suzuki H., Kotani K., Teramoto A. Feasibility and Usefulness of a Joystick-Guided Robotic Scope Holder (Soloassist) in Laparoscopic Surgery // Visceral Medicine. 2018. № 34 (1). P. 37.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин