

Поверхность. Рентгеновские, синхротронные и нейтронные исследования, 2023, № 5, стр. 58-64
О пространственном разрешении пьезорезонансного зондового датчика с вольфрамовой иглой
О. М. Горбенко a, *, М. В. Жуков a, **, С. Ю. Лукашенко a, С. В. Пичахчи a, И. Д. Сапожников a, М. Л. Фельштын a, А. О. Голубок a, ***
a ИАП РАН
198095 Санкт-Петербург, Россия
* E-mail: gorolga64@gmail.com
** E-mail: cloudjyk@yandex.ru
*** E-mail: aogolubok@mail.ru
Поступила в редакцию 26.06.2022
После доработки 20.08.2022
Принята к публикации 20.08.2022
- EDN: KRPFZE
- DOI: 10.31857/S1028096023050060
Аннотация
В сканирующей зондовой микроскопии используют зондовые датчики силового взаимодействия различных типов. Наиболее широко распространены кремниевые кантилеверы с оптической регистрацией их отклонения под действием силового взаимодействия с исследуемой поверхностью. Также известны самосогласованные (“self-sensing”) зондовые датчики на основе кремниевого кантилевера или пьезотрубки, использующие пьезорезистивный или пьезорезонансный принципы измерения их прогиба соответственно. В настоящей работе исследованы характеристики самосогласованного пьезорезонансного зондового датчика. Датчик представляет собой пьезотрубку, на свободном конце которой закреплена игла из W длиной несколько мм. Принято считать, что пространственное разрешение зондовых датчиков в сканирующей зондовой микроскопии обусловлено радиусом закругления наноиглы. Однако в колебательных режимах работы “пятно” контакта зонда с образцом может размываться, ухудшая пространственное разрешение. В настоящей работе методом конечных элементов рассчитаны амплитудно-частотная характеристика системы “пьезотрубка – игла” и размер эффективного пятна контакта зонда с образцом в условиях реального эксперимента. Проведено сравнение результатов расчета с экспериментальной амплитудно-частотной характеристикой.
ВВЕДЕНИЕ
Традиционным датчиком локальной силы в сканирующей зондовой микроскопии (СЗМ) [1, 2] является кремниевый кантилевер [3], в котором силу взаимодействия зонда с образцом детектируют по отклонению лазерного луча, отраженного от изогнутой поверхности кантилевера. Также в некоторых случаях используют самосогласованные (“self-sensing”) датчики, не требующие оптической схемы измерения и преобразующие силовое взаимодействие зонда с образцом непосредственно в электрический сигнал [4]. Например, в [5] описан самосогласованный датчик в виде кварцевого камертона, на одном из плеч которого закреплена игла из W, в [6] – так называемый, Акияма-датчик, в котором к кварцевому резонатору прикреплен кантилевер из Si, в [7] – кремниевый кантилевер с тензорезистором, а в [8] – датчик в виде пьезокерамической трубки с прикрепленной к ней застроенной проволокой из W. В настоящее время для детального понимания поведения электромеханических систем, в том числе, таких как зондовые датчики и пьезосканеры или пьезодвижители СЗМ, широко применяют математическое моделирование с использованием метода конечных элементов. Например, в [9–11] методом конечных элементов исследовали классический кремниевый кантилевер с оптической схемой регистрации его изгиба, а в [12] оптимизировали линейный пьезоэлектрический мотор СЗМ. В настоящей работе методом конечных элементов исследовано поведение зондового датчика, предложенного в [8]. В таком датчике одна половина пьезотрубки работает как вибратор, раскачивающий трубку с иглой из W на резонансной частоте. Вторая половина пьезотрубки является пьезодатчиком, напряжение на котором возникает вследствие прямого пьезоэффекта [13] и обусловлено амплитудой колебаний трубки, зависящей, в свою очередь, от силового взаимодействия иглы с поверхностью образца. В реальных конструкциях в колебательном резонансном измерительном режиме вершина иглы может колебаться как перпендикулярно, так и вдоль поверхности образца, результатом чего является размывание “пятна” контакта зонда с образцом. Следует отметить, что подобное размытие является следствием конструкционных особенностей рассматриваемого датчика и не возникает при использовании кантилеверов из Si. В настоящей работе построена модель реального самосогласованного пьезорезонансного датчика с иглой из W, описанного в [8], и исследовано влияние геометрических параметров иглы на резонансные характеристики и чувствительность датчика.
ОПИСАНИЕ МОДЕЛИ
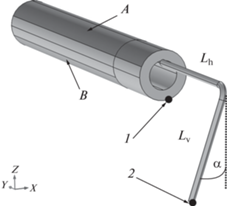
Датчик представляет собой трубку из пьезокерамического материала ЦТС-19 [14], длиной 8 мм с внешним диаметром 1.2 мм и толщиной стенки 0.25 мм, в которой закреплен зонд (игла) из согнутой под углом 90° вольфрамовой проволоки диаметром D = 0.15 или 0.3 мм, с длинами горизонтального (Lh) и вертикального (Lv) участков (плеч) (рис. 1) в диапазоне, соответственно, (0.5–5.0) и (1–6) мм.
Рис. 1.
Модель пьезорезонансного зондового датчика. Расчеты АЧХ датчика выполняли в точке 1, для анализа пространственного разрешения датчика выполняли расчеты в точке 2.
Указанные параметры были заложены в расчетную модель, построенную при помощи программного пакета COMSOL. Задний торец трубки был жестко закреплен, а вольфрамовая игла жестко закреплена на внутренней поверхности у переднего торца трубки (рис. 1). В качестве параметров пьезокерамики ЦТС-19 были взяты имеющиеся во встроенной библиотеке COMSOL параметры пьезокерамики PZT-5 [15], как наиболее близкой по свойствам [16]. Датчик имел два электрода, расположенные на внешней поверхности трубки и подсоединенные к электрической цепи. Внутренняя поверхность трубки заземлена. К верхнему электроду (A на рис. 1) подключен генератор синусоидального напряжения в диапазоне частот 5–15 кГц. Амплитуда напряжения генератора соответствовала экспериментально заданному и составила 20 мВ. Напряжение, возникающее вследствие прямого пьезоэффекта в процессе колебаний трубки с зондом, измеряли на нижнем электроде (B на рис. 1).
При расчетах решали мультифизическую задачу с использованием следующих модулей COMSOL: Solid Mechanics, предназначенного для анализа широкого спектра структурно-механических моделей; Electrostаtics, позволяющего выполнять расчет электрических полей в моделях, состоящих из различных материалов; Electrical Circuit, обеспечивающего возможность подключения модели к электрической цепи. Модули Solid Mechanics и Electrostаtics объединены при помощи мультифизической связки Piezoelectric Effect [17]. В расчетах варьируемыми являлись следующие параметры модели: расстояние Lh, на которое зонд выдвинут из трубки; длина зонда по вертикали Lv; угол поворота зонда α; диаметр проволоки D (рис. 1).
В модели рассмотрены вынужденные колебания датчика при условии, что зонд находится вдали от поверхности образца. Механические потери в модели заданы в форме рэлеевского демпфирования [18–20] с коэффициентами, определенными на основе экспериментальных данных: добротность резонансного пика (Q-фактор) на частоте f0 = 9 кГц равна 50.
Решение задачи при помощи пакета COMSOL позволяет построить амплитудно-частотную характеристику (АЧХ) датчика для различных точек модели. Поскольку резонансные характеристики датчика измеряли через прямой пьезоэффект на пьезотрубке, то для расчета АЧХ выбирали точку на пьезотрубке, имеющую максимальное отклонение (точка 1 на рис. 1), в то время как для анализа пространственного разрешения датчика вычисляли отклонения вершины вольфрамовой иглы (точка 2 на рис. 1).
РЕЗУЛЬТАТЫ
Сравнение расчетных АЧХ с экспериментальной резонансной кривой (рис. 2а) показало, что потери в модели заданы адекватно экспериментальным данным, и что расчетная резонансная частота близка к измеренной экспериментально.
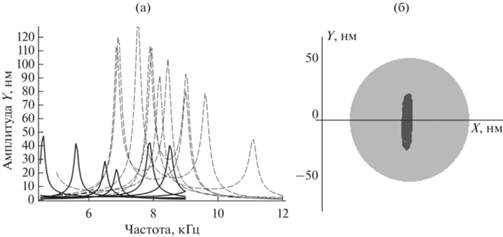
Рис. 2.
Сравнение экспериментальной и расчетной резонансных кривых пьезодатчика (а) и экспериментальная кривая подвода (б).
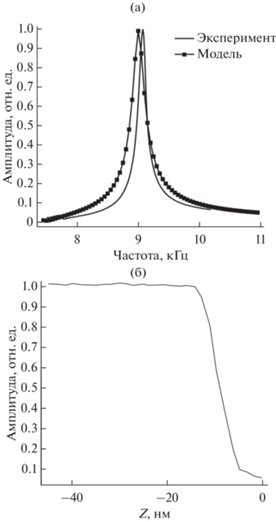
Кроме того, адекватность построенной модели подтверждается характером экспериментальной кривой подвода (рис. 2б). Из графика зависимости амплитуды колебаний датчика от расстояния до поверхности образца, измеренной в процессе проведения эксперимента с реальным датчиком, видно, что падение величины амплитуды от максимального значения при вынужденных колебаниях (принятого за единицу) до минимального значения происходит на расстоянии приблизительно 15 нм. Эта величина находится в пределах диапазона рассчитанных амплитуд колебаний датчика, представленных далее.
Были рассчитаны АЧХ датчиков в точке 1 (рис. 1) с различными длинами горизонтального (Lh) (рис. 3а) и вертикального (Lv) (рис. 3б) плеч зонда. Для сравнения рассчитаны и приведены графики АЧХ трубки датчика без зонда (пунктирная линия). Из сравнения полученных кривых можно заключить, что зонд влияет как на форму АЧХ датчика, так и на амплитуду его колебаний. При некоторых размерах зонда на АЧХ в заданном диапазоне частот появляются дополнительные резонансные пики, что, вообще говоря, может ухудшать пространственное разрешение метода.
Рис. 3.
Измеренные зависимости АЧХ датчика от геометрических параметров зонда (диаметр проволоки D = 0.15 мм): при колебаниях вдоль оси Z в точке 1 (на конце трубки) при различных величинах Lv, Lh = 2 мм, α = 0° (а) и при различных величинах Lh, Lv = 3 мм, α = 0° (б); при колебаниях вдоль оси Y в точке 2 при различных величинах Lh, Lv = 3 мм, α = 0° (в); при колебаниях вдоль оси Z (Tube Z) и вдоль осей X, Y (Tip X, Tip Y) при различных величинах угла наклона зонда α = 10°, 20° и 30°, Lh = 2 мм, Lv = 3 мм (г).
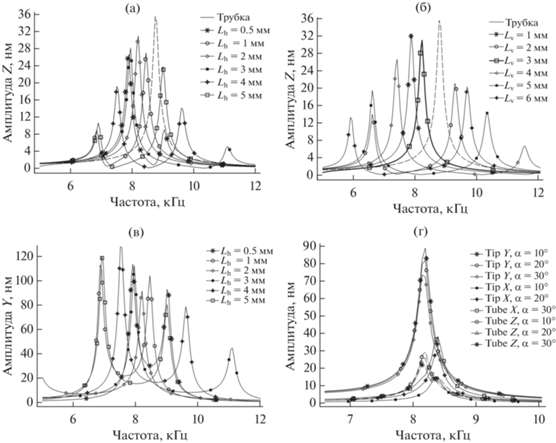
Для того чтобы оценить влияние параметров зонда на размер пятна контакта с образцом, были рассчитаны АЧХ в точке 2 (вершина зонда). В качестве меры оценки влияния колебаний на пространственное разрешение зонда принята величина радиуса сферы закругления зонда RTip ~ 50 нм. Расчеты показали, что в рабочем режиме (на резонансной частоте всей конструкции) вершина зонда (точка 2) с любыми параметрами имеет наибольшую амплитуду колебаний, направленных вдоль оси трубки датчика (ось Y). Это продемонстрировано на примере набора зондов с различным размером горизонтальной части Lh = 0.5; 1; 2; 3; 4; 5 мм, при фиксированной длине Lv = 3 мм, α = 0° (рис. 3в). При отсутствии поворота зонда вокруг оси Y колебаний в направлении оси Х нет, однако амплитуда колебаний вершины зонда вдоль оси трубки датчика на основной резонансной частоте датчика меняется в пределах 90–128 нм, что существенно превышает величину RTip ~ 50 нм.
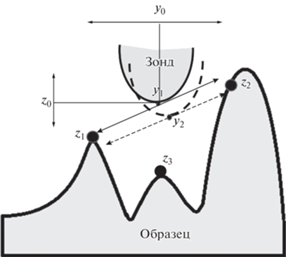
Колебания в горизонтальной плоскости влияют на разрешение изображений, получаемых при сканировании в прерывистом (полуконтактном) режиме и приводят к уменьшению точности измерений высоты рельефа (координата Z). Если амплитуда колебаний вершины зонда в плоскости образца меньше, чем характерный шаг профиля поверхности, то пространственное разрешение метода будет определяться характерным радиусом закругления наноиглы. Однако разрешение будет ухудшаться с увеличением шероховатости поверхности образца, если характерный шаг профиля поверхности будет меньше амплитуды паразитных колебаний зонда вдоль направления Х или Y. Действительно, в случае гладкой поверхности колебания вдоль направлений Х или Y приведут лишь к сдвигу точки столкновения зонда с поверхностью образца. Если же на исследуемой поверхности имеется рельеф с характерным шагом профиля, меньшим, чем амплитуда паразитных колебаний, то при сканировании поверхности точка столкновения зонда с поверхностью может сместиться в плоскости образца на величину, превышающую шаг сканирования. В результате возникает размывание точки контакта зонда с поверхностью образца, что приводит к искажению реального рельефа на СЗМ-изображении (рис. 4).
Рис. 4.
Иллюстрация ухудшения чувствительности саморегулирующегося пьезорезонансного зондового датчика вследствие паразитных колебаний вершины зонда вдоль оси Y. Здесь y1, y2 – равновесные положения вершины зонда в разных точках поверхности в процессе сканирования вдоль оси Y; y0 – амплитуда паразитных колебаний зонда; z0 – амплитуда колебаний зонда вдоль координаты Z в полуконтактном режиме; z1 – точка столкновения зонда, колеблющегося около равновесного положения y1, c поверхностью образца; z2 – точка столкновения зонда, колеблющегося около равновесного положения y2, c поверхностью образца. Наклонными стрелками показана траектория перемещения зонда в полуконтактном режиме в присутствии паразитных колебаний. Наличие паразитных колебаний вершины зонда вдоль оси Y препятствует попаданию вершины зонда в точку z3, что приводит к ухудшению чувствительности датчика.
Исследование зависимости АЧХ датчика от угла поворота зонда α показало, что при наличии поворота зонда амплитуда колебаний вершины зонда вдоль оси Y уменьшается, но появляются колебания вдоль направления Х, перпендикулярного оси трубки (рис. 3г). Для того, чтобы определить положение резонансных пиков, на рис. 3г приведены АЧХ датчиков в точке 1 (на конце пьезокерамической трубки). Видно, что резонансные частоты всего датчика и колебаний вершины зонда в точке 2 в направлении Y совпадают, а резонансные частоты колебаний в точке 2 в направлении оси Х смещены. Это означает, что колебания вершины зонда на резонансной частоте датчика в направлении Y имеют максимальную амплитуду, а вдоль оси X – уменьшенную. Для датчика с размерами плеч Lh = 2 мм, Lv = 3 мм при повороте на 30° амплитуда колебаний вершины зонда вдоль оси Y уменьшилась с 92 до 74 нм, однако и эта величина превышает RTip ~ 50 нм.
Для того, чтобы проиллюстрировать чувствительность датчика, выполнено исследование колебаний вершины зонда в зависимости от времени. На рис. 5а приведена временнáя диаграмма колебаний вершины зонда датчика на резонансной частоте f0 = 8.2 кГц (Lh = 2 мм, Lv = 3 мм, α = = 20°). Примеры изображений траекторий движения вершины зонда (точка 2) во времени в плоскости XY приведены на рис. 5б. Слева показана траектория для зонда с величиной горизонтального плеча Lh = 4 мм, Lv = 3 мм, α = 0°, имеющего, как показано на рис. 3в, наибольшую амплитуду колебаний вдоль оси Y, равную 128 нм. Справа – траектория для зонда с параметрами Lh = 2 мм, Lv = 3 мм, α = 20°, амплитуды колебаний которого вдоль оси Y составляет 84 нм, а вдоль оси X – 22 нм. Для оценки влияния колебаний вершины зонда на чувствительность датчика светло-серым цветом показана область радиусом RTip ~ 50 нм, соответствующим характерному значению радиуса закругления наноиглы. Сравнение амплитуд с радиусом RTip колебаний в точке 2 датчиков с приведенными выше параметрами позволяет сделать вывод о том, что колебания вершины зонда вносят существенный вклад в размер пятна контакта, особенно в направлении, совпадающем с осью трубки датчика (ось Y).
Рис. 5.
Временнáя диаграмма колебаний датчика с параметрами Lh = 2 мм, Lv = 3 мм, α = 20° в точке 2 вдоль осей X и Y (а) и отображение траекторий движения вершины зондов с параметрами Lh = 4 мм, Lv = 3 мм, α = 0° (слева) и Lh = 2 мм, Lv = 3 мм, α = 20° (справа) во времени в плоскости XY (б); светло-серым цветом показана проекция сферы закругления острия зонда на плоскость XY.

Одним из возможных способов уменьшить размер “пятна” контакта является использование зонда из более толстой проволоки. Чтобы оценить эффект, который может дать использование зонда из более толстой проволоки, был проведен модельный эксперимент с проволокой толщиной 0.3 мм в качестве материала зонда. В результате вычислений получено, что амплитуда движения вершины зонда из проволоки толщиной D = 0.3 мм сократилась приблизительно в 4 раза по сравнению с зондом из проволоки толщиной D = 0.15 мм. На рис. 6а показаны амплитуды колебаний вершины зонда в направлении оси Y для зондов, изготовленных из проволоки различной толщины. Для зондов из каждого типа проволоки проведен расчет на одинаковом наборе величин Lh = 0.5; 1; 2; 3; 4; 5 мм, Lv = 3 мм. Видно, что зонды из более толстой проволоки, независимо от длины горизонтального плеча (Lh), совершают колебания меньшей амплитуды, чем зонды из тонкой проволоки. На рис. 6б приведено изображение траектории движения вершины зонда во времени в горизонтальной плоскости (темно-серым) для зонда с параметрами Lh = 2 мм, Lv = 3 мм, α = 20°. Светло-серым цветом показана область радиусом RTip ~ ~ 50 нм. Размах колебаний вершины зонда в этом случае меньше, чем диаметр закругления зонда, что позволяет утверждать, что при использовании более толстой проволоки эффективный размер пятна контакта обусловлен, в основном, радиусом закругления иглы.
Рис. 6.
АЧХ колебаний вершины зондов (в точке 2) с различными величиной горизонтального плеча Lh и диаметром проволоки D = 0.15 мм (пунктирная линия), D = 0.30 мм (сплошная линия) (а) и изображение траектории движения вершины зонда с диаметром проволоки D = 0.3 мм, Lh = 2 мм, Lv = 3 мм, α = 20° во времени в плоскости XY (б).
ВЫВОДЫ
При работе сканирующего зондового микроскопа с самосогласованным пьезорезонансным зондовым датчиком в виде пьезотрубки с прикрепленным к ее внутренней поверхности зондом из заостренной вольфрамовой проволоки возникают резонансные колебания вершины зонда вдоль оси трубки. Расчеты показывают, что амплитуда таких колебаний может превышать ~100 нм, что в два раза больше характерной величины радиуса закругления иглы. Также показано, что, как правило, происходящий на практике поворот зонда вокруг оси трубки приводит к появлению колебаний вершины зонда в направлении, перпендикулярном к оси трубки. Возникающие колебания вершины зонда в плоскости образца будут размывать пятно контакта зонда с образцом, ухудшая чувствительность сканирующего зондового микроскопа в прерывистом (полуконтактном) режиме измерений. Для уменьшения паразитных колебаний вершины зонда следует увеличивать диаметр проволоки и устанавливать зонд в датчике с отклонением от вертикального положения на угол порядка 20°. Так, например, при увеличении диаметра проволоки из W с 0.15 до 0.30 мм амплитуда колебаний вершины зонда уменьшается в четыре раза и при Lh = 2 мм, Lv = = 3 мм, α = 20° достигает величины ~20 нм, что в два раза меньше характерной величины радиуса закругления иглы из W. Таким образом, с помощью численного эксперимента получены геометрические параметры для зонда из W самосогласованного пьезорезонансного зондового датчика, при которых колебания вершины зонда в плоскости образца, возникающие в полуконтактном режиме измерений, не будут приводить к ухудшению пространственного разрешения метода.
Список литературы
Binnig G., Quate C.F., Gerber Ch. // Phys. Rev. Lett. 1986. V. 56. P. 930. https://www.doi.org/10.1103/PhysRevLett.56.930
Wiesendanger R. Scanning Probe Microscopy and Spectroscopy. Cambrige University Press, 1994. 637 p.
Миронов В.Л. Основы сканирующей зондовой микроскопии. Москва: Техносфера, 2009. 143 с.
Sharapov V. Piezoceramic Sensors. Springer Verlag, 2011. 498 p.
Giessibl F.J. // Appl. Phys. Lett. 1998. V. 73. P. 3956. https://www.doi.org/10.1063/1.122948
Akiyama T., Staufer U., de Rooij N.F. // Appl. Surf. Sci. 2003. V. 210. P. 18. https://www.doi.org/10.1016/S0169-4332(02)01471-X
Bausells J. // Microelectronic Engineering. 2015. V. 145. P. 9. https://www.doi.org/10.1016/j.mee.2015.02.010
Васильев А.А., Керпелева С.Ю, Котов В.В., Сапожников И.Д., Голубок А.О. // Научное приборостроение. 2005. Т. 15. С. 62.
Быков А.В. // Известия ЮФУ. Технические науки. 2015. Т. 9. № 170. С. 145.
Малохатко С.В., Гусев Е.Ю., Быков А.В., Житяева Ю.Ю. // Известия ЮФУ, Технические науки. 2017. Т. 6. С. 234.
Yang, M.-H. // Master Thesis, Department of Mechanical and Mechatronic Engineering, National Taiwan Ocean University: Keelung. 2007.
Гальченко В.Я., Филимонов С.А., Батраченко А.В., Филимонова Н.В. // Журн. нано- и электронной физики. 2018. Т. 10. С. 04025-1.
Барфут Дж. Полярные диэлектрики и их применение. М.: Мир, 1981. 526 с.
Яффе Б., Кук У., Яффе Г. Пьезоэлектрическая керамика. М.: Мир, 1974. 288 с.
Ransley J. Пьезоэлектрические материалы: разбор стандартов. Блог COMSOL https://www.comsol.ru/ blogs/piezoelectric-materials-understanding-standards/. Cited 02 October 2014.
Черепанцев А.С., Салтыков В.А. // Приборы и техника эксперимента. 2020. Т. 1. С. 130.
COMSOL Documentation. https://doc.comsol.com. Cited 02 October 2014.
Meirovitch L. Fundamentals of Vibration. McGraw-Hill Education, 2003. 806 p.
Wilson E.L. Static and Dynamic Analysis of Structures (4th ed.). Berkeley Computers and Structures Inc, 2002. 423 p.
Соннерлинд Х. Теория и механизмы демпфирования в механике конструкций. Блог COMSOL https://www.comsol.ru/blogs/damping-in-structural-dynamics-theory-and-sources/. Сited 14 March 2019.
Дополнительные материалы отсутствуют.
Инструменты
Поверхность. Рентгеновские, синхротронные и нейтронные исследования