

Программирование, 2023, № 3, стр. 13-25
АЛГОРИТМ ОБНАРУЖЕНИЯ АТМОСФЕРНЫХ ОСАДКОВ ДЛЯ ЗАДАЧ КОМПЬЮТЕРНОЙ ОБРАБОТКИ ВИДЕОИЗОБРАЖЕНИЙ
В. Т. Дмитриев a, *, А. А. Бауков a, **
a Рязанский государственный радиотехнический университет имени В.Ф. Уткина
390005 Рязань, ул. Гагарина, д. 59/1, Россия
* E-mail: vol77@rambler.ru
** E-mail: baukov.andrej@yandex.ru
Поступила в редакцию 09.01.2023
После доработки 16.01.2023
Принята к публикации 22.01.2023
- EDN: DECIHE
- DOI: 10.31857/S0132347423030019
Аннотация
Показана актуальность задачи обнаружения и уменьшения видимости атмосферных осадков на видеоизображениях, полученных неподвижными камерами. Выполнен статистический анализ геометрических (площадь, коэффициент формы, отклонение ориентации от средней по кадру) и цветояркостных (интенсивность, насыщенность цвета) характеристик частиц дождя и снега с целью обоснования решающих правил выделения пикселей частиц осадков. Данный анализ заключается в получении распределений исследуемых параметров частиц и аппроксимации их известными законами распределений с использованием метода семейства кривых Пирсона, критерия Колмогорова и симплекс-алгоритма Нелдера–Мида. Разработан алгоритм детектирования капель дождя и снежинок на видеопоследовательностях, который предполагается к использованию в составе алгоритма уменьшения видимости атмосферных осадков. Предложенный подход представлен в виде многоступенчатой классификации пикселей кадра на зоны с движущимися объектами и области неподвижного фона, искажаемые и неискажаемые частицами осадков в течение накопленных кадров. В зависимости от области, к которой относится обрабатываемый пиксель, итоговое решение об отнесении его к классу атмосферных осадков принимается с использованием предложенных решающих правил или разработанной процедуры пороговой обработки с автоматическим определением локальных пороговых значений. Выполнено экспериментальное исследование предложенного алгоритма и с использованием двухкритериального подхода определены оптимальные значения числа накопленных кадров для корректной работы алгоритма: 100 кадров для видеоизображений с дождем; и 140 кадров для видео со снегом. Выигрыш разработанного подхода по сравнению с известными по оценкам вероятностей ошибок первого и второго рода составляет до 1.7 и 9.1% соответственно.
1. ВВЕДЕНИЕ
Видеоизображения часто снимаются в неблагоприятных погодных условиях. Такие мешающие факторы, как дождь, снег, град, то есть атмосферные осадки в виде падающих частиц, приводят к возникновению в кадре эффекта динамических помех. Помехи такого типа могут привести к ограничению видимости объектов в кадре, уменьшению контрастности, а также к полному перекрытию падающими частицами обзора мелких деталей видеосцены.
Поскольку для обработки видеоизображений часто используются различные алгоритмы систем компьютерного зрения, то нежелательные эффекты, вызванные описанными динамическими помехами, могут привести к ошибкам и сбоям при выполнении данных алгоритмов [1]. Так, наличие атмосферных осадков способно значительно снизить качество работы алгоритмов распознавания и классификации образов, которые в настоящее время часто используются при функционировании таких автоматизированных систем, как беспилотные робототехнические комплексы или транспортные средства. Описанные мешающие факторы могут вызвать неправильное распознавание препятствия, что может привести к аварийной ситуации. Кроме того, неблагоприятные погодные явления, присутствующие в кадре, ухудшают восприятие видеосцены наблюдателем или телезрителем, снижают дальность наблюдения, уменьшают информативность видеоизображений. Поэтому целесообразным является включение в состав систем компьютерного зрения и использование алгоритма интеллектуальной обработки видеоизображений, снятых статичными камерами, который должен решать задачи обнаружения и уменьшения видимости частиц атмосферных осадков на видеопоследовательностях.
В настоящее время известен ряд работ [2–5], в которых описаны подходы к детектированию частиц дождя или снега на видеоизображениях. Основной сложностью такого детектирования является отнесение пикселей, выделенных в результате порогового сравнения последовательных кадров, к классу частиц осадков или к классу других движущихся объектов. Каждый из известных алгоритмов отличается способом данной классификации и имеет свои особенности и недостатки.
Одним из основных шагов алгоритма, основанного на фотометрической и динамической моделях дождя [2], является применение линейного фотометрического ограничения к пикселам-кандидатам, которые обнаружены на этапе порогового сравнения и, возможно, перекрыты частицами осадков. Согласно данному ограничению, изменение ΔI значения пиксела капли в k-м кадре линейно связано с пикселем фона Ik – 1, перекрытым этой каплей, с коэффициентом наклона линейной зависимости в пределах 0 < β0< 0.039. В результате предварительных экспериментальных исследований установлено, что данное ограничение является излишне строгим, поэтому основным недостатком рассмотренного алгоритма является большое количество “пропущенных”, то есть необработанных дождевых пикселей. Кроме того, при разработке данного подхода рассматривались физические свойства только частиц дождя. Это ограничивает его применение по отношению к другим видам атмосферных осадков, например, в условиях снегопада.
В алгоритме, основанном на временной кластеризации пикселей только по их цветояркостным характеристикам [3], часто появляются ошибки при определении принадлежности пиксела к определенному классу. Это приводит к наличию достаточно большого количества необработанных дождевых и ошибочно обработанных недождевых пикселей. Также стоит отметить значительные вычислительные затраты, которые приводят к временной задержке при определении расположения частицы осадков: на объекте переднего плана или на фоне неподвижного дальнего плана; что затрудняет реализацию данного алгоритма в реальном времени.
Общим недостатком двух рассмотренных выше алгоритмов является то, что в них не используется информация о геометрических характеристиках капель дождя или снежинок на этапе их обнаружения. Информация о геометрических параметрах должна способствовать более точному и полному обнаружению дождевых или снеговых пикселей. Это подтверждается в процессе предварительного экспериментального исследования алгоритма [4], основанного на использовании характеристик формы частиц дождя. В данном алгоритме к областям-кандидатам, выделенным в результате процедуры порогового сравнения, применяются ограничения на форму и ориентацию этих областей, что приводит к меньшему количеству ложных срабатываний. Однако количество пропущенных частиц осадков все еще достаточно велико. Этот факт побуждает искать методы и подходы снижения данного критерия. Другим недостатком рассматриваемого алгоритма является возможность применения ограничения на форму частиц только для капель дождя, что затрудняет использование данного подхода для других видов атмосферных осадков.
Одним из способов устранения указанных недостатков известных алгоритмов обнаружения частиц осадков на видеоизображениях может являться разработка решающих правил выделения пикселей таких частиц, основанных на статистическом анализе геометрических параметров (размер, форма, ориентация) капель или снежинок [4–6]. Также для увеличения точности обнаружения данных частиц целесообразно использовать их яркостные характеристики, описанные в работах [2, 3].
Кроме того, для оптимизации использования вычислительных ресурсов и возможности реализации алгоритма в реальном времени, целесообразно разделить задачу обнаружения частиц осадков на детектирование на фоне относительно постоянного заднего плана видеосцены и обнаружение на участках кадров, содержащих множество подвижных объектов. При этом детектирование частиц осадков на областях, соответствующих заднему плану, может быть выполнено только за счет процедуры порогового обнаружения с использованием автоматически определяемых локальных пороговых значений. А разработанные решающие правила, для применения которых необходимо вычислять геометрические параметры каждой частицы-кандидата, можно использовать только в зонах изображения с подвижными объектами.
2. СТАТИСТИЧЕСКИЙ АНАЛИЗ ХАРАКТЕРИСТИК ЧАСТИЦ АТМОСФЕРНЫХ ОСАДКОВ НА ВИДЕОИЗОБРАЖЕНИЯХ
При первичной классификации пикселей подвижных и неподвижных объектов используют, как правило, процедуры порогового сравнения нескольких последовательных кадров [2, 5]. Так, для сопоставления значений I (x, y)-го пиксела (k – 1)-го, k-го и (k + 1)-го кадров авторами предложено логическое выражение
2.1. Процедура статистического анализа геометрических характеристик
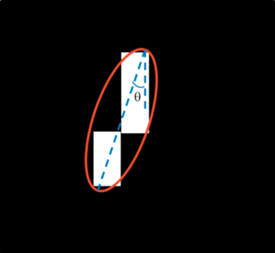
Так как изображения средних и больших по размеру частиц осадков обычно принимают вытянутую вниз форму, а ориентация (угол наклона по отношению к вертикальной оси) всех таких частиц в одном кадре примерно одинакова [4, 5], то наибольший интерес в качестве геометрических характеристик капель дождя и снежинок представляют размер, форма и ориентация частицы. При статистическом анализе данных параметров использованы видеоизображения, в которых движутся только частицы осадков, а другие объекты остаются неподвижными. В этом случае группы-кандидаты пикселей двоичного изображения, полученного в результате процедуры порогового сравнения трех последовательных монохромных кадров, точно являются частицами осадков. Для вычисления искомых характеристик используется метод геометрических моментов, согласно которому каждая группа-частица аппроксимируется эллипсом с центральными моментами 2-го порядка, равными центральным моментам 2-го порядка аппроксимируемой группы [5]. На рис. 1 представлен пример аппроксимации частицы осадков эллипсом.
Пусть p – порядковый номер эллипса (группы). Центральные моменты 2-го порядка для p-й группы вычисляются по формулам [5]:
Ориентация θp, большая ap и малая bp полуоси p-го аппроксимирующего эллипса вычисляются согласно выражениям, представленным в работе [5], с использованием рассчитанных значений центральных моментов. Так,
Анализируются три геометрических характеристики частицы дождя или снега:
1. Площадь Sp, равная числу точек в соответствующей группе.
2. Коэффициент формы Φp = ap/bp.
3. Отклонение $\theta _{p}^{'}$ ориентации капли или снежинки от среднего значения θ0 ориентации в кадре: $\theta _{p}^{'}$ = θp – θ0.
В процессе статистического исследования выполняется построение гистограмм распределений этих параметров. Далее осуществляется аппроксимация данных гистограмм известными законами распределения. Для этого сначала методом семейства кривых Пирсона оценивается тип распределения [7–9]. Согласно данному методу, тип определяется по величине kП, которая вычисляется по формуле [8]:
Затем с использованием метода минимизации целевой функции [10] симплекс-алгоритмом Нелдера–Мида [11] производится оценка параметров функции плотности вероятности (ФПВ), относящейся к типу распределения, определенного на предыдущем этапе статистического анализа. Начальные значения данных параметров рассчитаны с помощью метода моментов [12]. За целевую функцию принята функция критерия Колмогорова КК(u), которая количественно оценивает отклонение предполагаемого теоретического закона распределения от эмпирического следующим образом [13]:
Таким образом, результатом статистического анализа геометрических характеристик изображений частиц осадков являются теоретические законы распределения каждой из данных характеристик, которые используются для обоснования решающих правил обнаружения капель дождя или снежинок на видеоизображениях.
2.2. Результаты статистического анализа геометрических характеристик
На рис. 2 приведены гистограмма распределения площадей S снежинок на видеоизображенияхи аппроксимирующая это распределение ФПВ fСн_S.
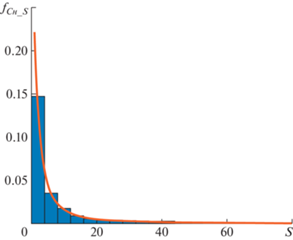
Для данного распределения величина kП = = 3336.7 > 1, поэтому оно относится к VI типу распределений Пирсона [8], частным случаем которого является бета-распределение II рода [14].
С использованием метода минимизации целевой функции [10] симплекс-алгоритмом Нелдера–Мида [11] установлено, что для распределения площадей S частиц снега на видеоизображениях параметры формы бета-распределения II рода принимают значения uСн_S = 1.86, νСн_S = 0.83.
Из анализа рис. 2 ясно, что, чем крупнее снежинка, тем менее вероятно ее появление в кадре. При этом размер снежинок может принимать значения в широких пределах, и, так как форма частиц осадков в значительной степени зависит от их размера, то построение гистограммы распределения значений Φ является целесообразным для нескольких диапазонов изменения S. Поскольку наибольший интерес для статистического анализа представляют частицы средней и крупной величины, то граничные значения диапазонов S выбраны по уровням значимости 0.7, 0.95 и 0.99 (как часто используемые в литературе, например, в [12]), что соответствует значениям S в 7, 69 и 484 пикселя. Математически это можно записать в виде:
Гистограммы распределений значений Φ для первого (7 ≤ S < 69) и второго (69 ≤ S < 484) диапазонов изменения площади S частиц снега, а также аппроксимирующие эти распределения ФПВ fСн_Φ1 и fСн_Φ2 представлены на рис. 3 и 4 соответственно.
Рис. 3.
Распределение коэффициентов формы Φ частиц снега для первого диапазона S и аппроксимирующая ФПВ fСн_Φ1.
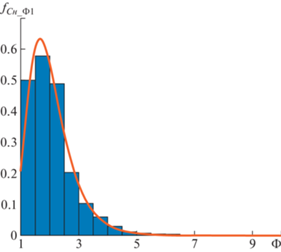
Рис. 4.
Распределение коэффициентов формы Φ частиц снега для второго диапазонаS и аппроксимирующая ФПВ fСн_Φ2.
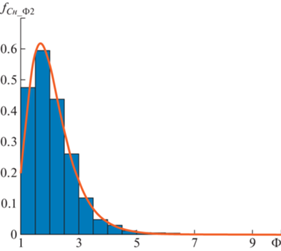
Для данных распределений коэффициент kП принимает значения 1.47 и 9.59 соответственно, следовательно, эти распределения относятся к VI типу распределений Пирсона [8] и аппроксимируются частным случаем данного типа – бета-распределением II рода [14]. Параметры ФПВ, аппроксимирующей распределение коэффициентов формы снежинок первого диапазона S, имеют значения uСн_Φ1 = 23.17, ${{{v}}_{{{\text{Сн\_}}\Phi 1}}}$ = 12.28. Параметры ФПВ, аппроксимирующей распределение коэффициентов формы снежинок второго диапазона S, имеют значения uСн_Φ2 = 22,73, ${{{v}}_{{{\text{Сн\_}}\Phi 2}}}$ = 11.9.
Гистограмма распределения значений отклонения θ' ориентации снежинок от среднего значения их ориентации в кадре и аппроксимирующая это распределение ФПВ fСн_θ представлены на рис. 5.
Рис. 5.
Распределение значений отклонения θ' ориентации снежинок от среднего значения их ориентации в кадре и аппроксимирующая ФПВ fСн_θ.
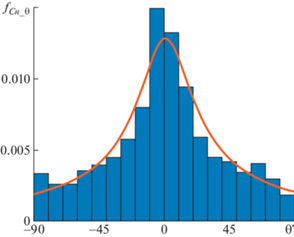
Из анализа рис. 5 видно, что отклонения ориентации частиц снега в большинстве случаев имеют малые по модулю значения. Для данного распределения значение kП = –0.007 < 0, т.е. распределение относится к I типу распределений Пирсона [8], однако значительно лучший результат с точки зрения минимума функции критерия Колмогорова [13] достигается при аппроксимации гистограммы данного распределения кривой Пирсона IV типа [14]. Параметры данного распределения также рассчитаны с использованием метода минимизации целевой функции симплекс-алгоритмом Нелдера–Мида: b0 = –316.14, b1 = 0.9, b2 = –0.84, c0 = 0.44.
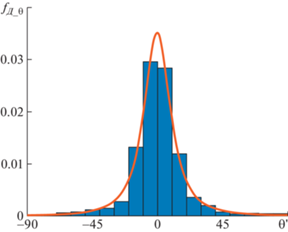
В процессе аналогичного статистического анализа геометрических характеристик капель дождя на видеоизображениях установлено, что распределение площадей S частиц аппроксимируется бета-распределением II рода с параметрами формы uД_S = 1.16, ${{{v}}_{{{\text{Д\_}}S}}}$ = 0.72. Распределение значений коэффициента формы Φ капель размером из первого диапазона (6 ≤ S < 76) может быть аппроксимировано бета-распределением II рода с параметрами формы uД_Φ1 = 15.35, ${{{v}}_{{{\text{Д\_}}\Phi 1}}}$ = 6.91, а для частиц дождя площадью из второго диапазона (76 ≤ S < 727) – обобщенным бета-распределением I рода с границами диапазона возможных значений ΦγД_Φ2 = 1, ${{\beta }_{{{\text{Д\_}}\Phi 2}}}$ = 16 и параметрами формы uД_Φ2 = 1.34, ${{{v}}_{{{\text{Д\_}}\Phi 2}}}$ = 7.37. Распределение значений отклонения θ' ориентации капель дождя от среднего значения их ориентации в кадре аппроксимируется ФПВ IV типа кривых Пирсона с параметрами b0 = –64.15, b1 = 0.25, b2 = –0.36, c0 = = 46.52.
Сравнивая результаты статистического анализа геометрических характеристик изображений частиц дождя с аналогичными результатами для частиц снега, можно отметить схожесть форм гистограмм распределений данных характеристик, а также форм кривых, аппроксимирующих эти гистограммы. Однако наблюдаются некоторые отличия. Так, по сравнению с частицами снега, капли дождя имеют более вытянутую форму и меньшие по модулю отклонения ориентации от среднего значения по кадру. Эти отличия хорошо видны, например, при сравнении приведенных на рис. 5 и 6 распределений отклонений ориентаций снежинок и капель соответственно.
2.3. Процедура и результаты статистического анализа цветояркостных характеристик
Частицы осадков также могут характеризоваться цветояркостными параметрами, к которым относятся интенсивность, цветовой тон, насыщенность цвета и др. [15].
При статистическом анализе цветояркостных характеристик, так же, как и геометрических, использованы видеоизображения, в которых движутся только атмосферные осадки. В результате порогового сравнения трех последовательных монохромных кадров ((k – 1)-го, k-го и (k + 1)-го) формируется двоичное изображение, в котором каждый пиксель со значением 1 относится к частицам осадков. Далее полноцветный k-й кадр преобразуется из цветового пространства RGB в цветовое пространство HSI [15]. В изображениях каналов интенсивности (I) и насыщенности цвета (S) выбираются только те пиксели, которые соответствуют пикселам двоичного изображения со значением 1.
Таким образом, анализируемыми цветояркостными параметрами пикселов частиц осадков являются:
1. Интенсивность Int.
2. Насыщенность цвета St.
На следующем этапе статистического исследования, аналогично анализу геометрических характеристик, осуществляется построение гистограмм распределений значений Int и St пикселей, выбранных на предыдущем этапе, и аппроксимация данных гистограмм известными законами распределения с использованием метода семейства кривых Пирсона [7–9] и метода минимизации целевой функции [10] симплекс-алгоритмом Нелдера–Мида [11].
Гистограмма распределения значений интенсивности Int пикселей частиц снега на видеоизображениях и аппроксимирующая данное распределение ФПВ fСн_Int приведены на рис. 7.
Рис. 7.
Распределение значений интенсивности Int пикселей частиц снега и аппроксимирующая ФПВ fСн_In.
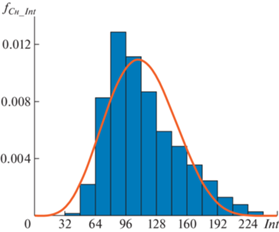
При этом величина kП = –0.31 < 0, следовательно, данное распределение относится к I типу кривых Пирсона и аппроксимируется частным случаем этого типа – обобщенным бета-распределением I рода, для которого границы диапазона возможных значений IntγСн_Int = 0, βСн_Int = 255 и параметры формы uСн_Int = 5.47, ${{{v}}_{{{\text{Сн\_}}Int}}}$ = 6.99.
Гистограмма распределения значений насыщенности цвета St пикселей снежинок на видеоизображениях и аппроксимирующая данное распределение ФПВ fСн_St приведены на рис. 8.
Рис. 8.
Распределение значений насыщенности цвета St пикселей снежинок и аппроксимирующая ФПВ fСн_St.
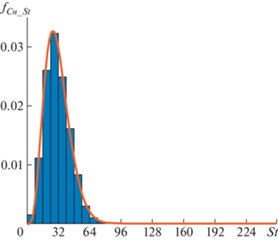
Из анализа данного рисунка можно отметить, что насыщенность цвета частиц снега на видеоизображениях смещена в область малых значений. Величина kП = 0.55, 0 < kП < 1, что соответствует IV типу кривых Пирсона [8]. Однако значительно более точный результат аппроксимации с точки зрения минимума функции критерия Колмогорова достигается при использовании кривой Пирсона I типа – обобщенного бета-распределения I рода с границами диапазона возможных значений StγСн_St = 0, βСн_St = 255 и параметрами формы uСн_St = 5.17, ${{{v}}_{{{\text{Сн\_}}St}}}$ = 37.01.
При исследовании цветояркостных характеристик пикселей капель дождя аналогичным образом установлено, что распределения значений интенсивности Int аппроксимируется ФПВ обобщенного бета-распределения I рода с границами диапазона γД_Int = 0, βД_Int = 255 и параметрами формы uД_Int = 6.54, ${{{v}}_{{{\text{Д\_}}Int}}}$ = 10.21, т.е. распределение интенсивностей для пикселей частиц дождя смещено в область меньших значений Int по сравнению с аналогичной гистограммой для частиц снега. Распределение значений насыщенности цвета пикселей капель, так же, как и для снежинок, смещено в область низких значений и может быть аппроксимировано ФПВ бета-распределения II рода с параметрами формы uД_St = 63.11, ${{{v}}_{{{\text{Д\_}}St}}}$ = 2.92.
2.4. Обоснование решающих правил обнаружения частиц осадков среди других движущихся объектов на видеоизображениях
На основе статистического анализа характеристик частиц атмосферных осадков на видеоизображениях, описанного выше, выполнено обоснование решающих правил детектирования таких частиц в кадре.
Во-первых, является целесообразным ограничить размер групп-кандидатов пикселей, формируемых на предыдущих этапах предложенного алгоритма, на уровне значимости α = 0.99. Поскольку распределение площадей частиц снега аппроксимируется бета-распределением II рода, то с помощью функции распределения FСн_S(S) этого закона определено, что данному уровню значимости соответствует значение S в 484 пиксела:
Данное ограничение означает, что группы-кандидаты пикселей, сформированные в результате этапа порогового сравнения, площадь которых S ≥ 484, не будут считаться предложенным алгоритмом частицами снега, и, следовательно, не будут подвергаться дальнейшей обработке.
Во-вторых, изображения средних и больших по размеру частиц осадков, как правило, принимают вытянутую вниз форму [4, 5], поэтому необходимо ограничение коэффициента формы групп-кандидатов таким образом, чтобы наименее вытянутые из них не принимались разрабатываемым алгоритмом за осадки. При уровне значимости α = 0.1 с помощью функций распределения FСн_Φ1(Φ) и FСн_Φ2(Φ) законов, аппроксимирующих распределения коэффициентов формы Φ для первого (7 ≤ ≤ S < 69) и второго (69 ≤ S < 484) диапазонов площади S частиц снега, установлены граничные значения Φ, равные 1.23 и 1.24 соответственно:
В-третьих, поскольку ориентация средних и крупных частиц осадков в одном кадре практически не изменяется [4], является целесообразным ограничение значений θ' таким образом, чтобы группы-кандидаты пикселей со значительным отклонением ориентации от среднего ее значения в кадре не принимались алгоритмом за капли или снежинки. Предложено двустороннее ограничение θ' по уровням значимости 0.05 и 0.95 (так как в этом случае суммарный уровень ограничения равен 0.1, как и при ограничении Φ). Данным уровням для частиц снега соответствуют значения отклонения ориентации, равные –67.83° и 70.76° соответственно, которые определены при помощи функции распределения FСн_θ(θ') IV типа кривых Пирсона:
В-четвертых, поскольку пиксели частиц осадков, как правило, имеют большие значения интенсивности по сравнению с пикселами фона [2, 3], является целесообразным ограничение величины Int пикселей групп-кандидатов по уровню значимости 0.05. Данный уровень в случае пикселей частиц снега соответствует значению Int = 56.57:
В-пятых, известно [3], что частицы атмосферных осадков преимущественно белого цвета, следовательно, насыщенность цвета St пикселей этих частиц должна иметь малые значения. Поэтому целесообразно ввести ограничение значений St пикселей групп-кандидатов по уровню значимости 0.95, что для пикселей снежинок соответствует величине St = 54.51:
Объединяя представленные выше ограничения геометрических характеристик групп-кандидатов пикселей для частиц снега, построим первое решающее правило, которое имеет вид:
Представленное решающее правило предназначено для проверки нулевой гипотезы, согласно которой p-я группа-кандидат пикселей, обнаруженная при пороговом сравнении на предыдущем этапе алгоритма, является частицей снега. В отношении групп-кандидатов, которые удовлетворяют данному логическому выражению, алгоритмом принимается решение, согласно которому они не являются снежинками, и, следовательно, не будут подвергаться последующей обработке, то есть принимается конкурирующая гипотеза. При невыполнении условия решающего правила принимается нулевая гипотеза.
При объединении описанных выше ограничений цветояркостных параметров пикселей групп-кандидатов получим второе решающее правило для потенциальных пикселей частиц снега:
Данное решающее правило предназначено для проверки нулевой гипотезы, согласно которой (x, y)-й пиксель p-й группы-кандидата, которая принята за частицу снега первым решающим правилом, является частью снежинки. Если характеристики пиксела удовлетворяют логическому условию, то принимается конкурирующая гипотеза, то есть данный пиксель не относится к частице снега, и он не будет подвергаться дальнейшей обработке алгоритмом, заключающейся в уменьшении видимости этой частицы. Если характеристики данного пиксела не удовлетворяют данному условию, то принимается нулевая гипотеза, и далее алгоритм интеллектуальной обработки видеоизображений применит к этому пикселу процедуру уменьшения видимости.
Обоснование решающих правил обнаружения капель дождя на видеоизображениях выполнено аналогичным способом. Тогда логическое условие первого решающего правила, основанного на статистическом анализе геометрических характеристик, имеет вид:
Логическое условие второго решающего правила, основанного на статистическом анализе цветояркостных характеристик пикселей частиц дождя:
3. СТАТИСТИЧЕСКИЙ АНАЛИЗ ИЗМЕНЕНИЙ ВО ВРЕМЕНИ ЗНАЧЕНИЙ ПИКСЕЛЕЙ ОБЛАСТЕЙ ВИДЕОКАДРОВ, В КОТОРЫХ НАБЛЮДАЕТСЯ ПРОХОЖДЕНИЕ АТМОСФЕРНЫХ ОСАДКОВ
При обнаружении частиц осадков на относительно неподвижном заднем плане видеоизображения важной задачей алгоритма является принятие решения о том, проходят ли дождь или снег в данном участке (в наилучшей реализации алгоритма – в каждом пикселе) кадра видеосцены. С целью обоснования соответствующего решающего правила выполнен анализ, описанный в данном разделе работы.
3.1. Процедура и результаты статистического анализа изменений во времени значений пикселей
В процессе анализа, приведенного в данном разделе, каждое отдельное распределение значений получено при наблюдении за отдельным пикселем в течение определенного интервала времени, как правило, в 80…200 кадров при частоте видео 25 кадров/с. При этом, аналогично предыдущему исследованию, использованы области видеоизображений с дождем и снегом на фоне постоянного во времени дальнего плана, пиксели которых изменяют свое значение только при прохождении частицы осадков или из-за незначительных колебаний освещенности и цифровых шумов. Таким образом построены временные распределения p(I) значений пикселей областей видеокадров, в которых в течение данного времени наблюдаются атмосферные осадки. Примеры гистограмм распределений p(I) для трех различных пикселей изображены на рис. 9(a, б, в).
Рис. 9.
Гистограммы распределений p(I) во времени значений I пиксела, взятого с: (a, б) области кадра с дождем; (в) области кадра со снегом; (г) неискаженной области кадра.
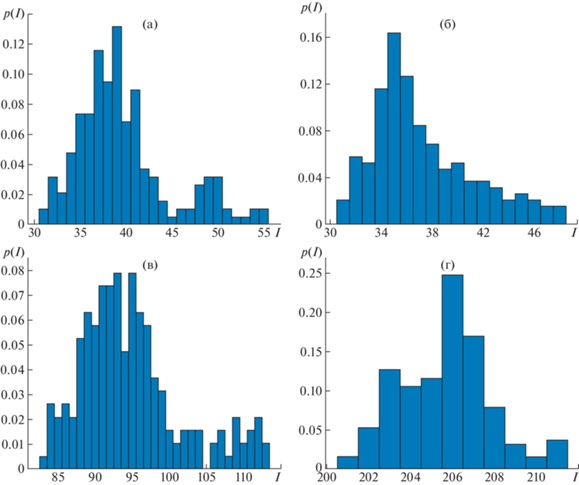
Согласно рис. 9(a, б, в), распределения значений во времени рассматриваемых пикселей являются асимметричными бимодальными или асимметричными унимодальными. Так как прохождение капли дождя или снежинки через точку изображения сопровождается скачком яркости этой точки [2, 3], то ее значения в данные моменты времени соответствуют меньшей моде или хвосту распределения p(I). При этом отношение числа кадров, в которых данный пиксель перекрыт частицами осадков, к числу кадров, в которых этот пиксель не искажен, зависит от интенсивности осадков и, как правило, не превышает 1 : 4…5. Данный факт объясняет положительную асимметрию, наблюдаемую на всех полученных временных распределениях значений пикселей. Для сравнения, на рис. 9(г) представлен пример гистограммы распределения p(I) пиксела, не искажаемого каплями или снежинками в процессе времени наблюдения. Подобные распределения, как правило, характеризуются симметрией и унимодальностью.
Обобщая вышеизложенный анализ, можно отметить, что по форме временного распределения p(I) возможно оценить, к какой области кадра относится соответствующий пиксель: к искажаемой – той, где наблюдаются атмосферные осадки за определенный промежуток времени; или к не искажаемой осадками.
3.2. Обоснование решающего правила обнаружения частиц осадков на фоне заднего плана видеоизображений
Одной из характеристик формы распределения случайной величины является коэффициент Сарле, предназначенный для оценки степени мультимодальности. Данный параметр описывается выражением [16]:
Авторами работы [16] отмечено, что коэффициент Сарле KS > 0.555 и для сильно асимметричных унимодальных распределений. Однако, как отмечено выше, распределения во времени значений пикселей искажаемых осадками участков кадра в случае своей унимодальности обязательно являются сильно асимметричными, поэтому указанная неточность критерия Сарле позволяет использовать его для обнаружения искажаемых и неискажаемых областей кадров. При этом, с учетом особенностей рассматриваемой задачи, предложена модификация данного коэффициента. Так, положительную асимметрию, являющуюся особенностью распределений p(I), необходимо учитывать в знаке коэффициента. Также в случае получения пограничного результата (KS ≈ 0.5…0.6) диапазон D значений рассматриваемой точки кадра за время построения p(I) может быть использован для принятия правильного решения о классификации пиксела. Тогда модифицированный коэффициент Сарле принимает вид:
где 8 – минимально заметное изменение значения точки видеоизображения при прохождении через нее капли или снежинки.Согласно предложенному критерию, при Km > > 0.555 полагается, что исследуемый пиксель принадлежит искажаемому осадками участку кадра (за накопленное число кадров частицы несколько раз затрагивают данную точку), при Km < < 0.555 – пиксель принадлежит области, в которой не наблюдаются осадки (возможно, что видеосцена совсем не содержит дождя или снега), следовательно, данная точка не подлежит последующей обработке.
Далее необходимо принять решение, затронуты ли пиксели, относящиеся к искажаемым участкам видеоизображения, частицами в текущем кадре. На данном этапе предусматривается проведение пороговой обработки с автоматическим вычислением локальных пороговых значений для каждой точки. Необходимость использования локальных, а не глобального для всего кадра порога объясняется тем, что в некоторых случаях значения пикселей краев капли или снежинки превышают значения соответствующих неискаженных точек всего на 4…7 единиц (в 8-битном представлении). При этом такие незначительные перепады легко спутать с колебаниями яркости пикселей дальнего плана, вызванными, например, флуктуациями освещенности, дрожанием листьев или цифровыми шумами.
На основе анализа распределений значений искаженных и неискаженных пикселей (рис. 9), локальные пороговые значения предложено вычислять по формуле:
Таким образом, решающее правило обнаружения частиц осадков на фоне заднего плана видеоизображений принимает вид:
Пиксели, удовлетворяющие данному логическому условию, принимаются за пиксели заднего плана кадра, не перекрытые частицами осадков в текущем кадре. В противном случае, пиксели считаются затронутыми каплями или снежинками и подлежат обработке алгоритмом уменьшения видимости данных частиц.
4. ОПИСАНИЕ ПРЕДЛОЖЕННОГО АЛГОРИТМА ОБНАРУЖЕНИЯ ЧАСТИЦ ОСАДКОВ
В основе разработанного алгоритма обнаружения частиц осадков на видеоизображениях лежит многоступенчатая классификация пикселей:
1. Разделение видеокадра на зоны с движущимися объектами (люди, автомобили и др.) и на участки с относительно постоянным задним планом в соответствии с диапазоном D(x, y) изменения во времени за n кадров значений (x, y)-го пиксела (выполняется один раз за n кадров).
Для областей с движущимися объектами:
2. Первичная классификация пикселей на движущиеся и неподвижные объекты с использованием порогового сравнения трех последовательных кадров.
3. Объединение 8-связных групп пикселей двоичного изображения, полученного на предыдущем этапе, в группы-кандидаты.
4. Расчет геометрических параметров (площадь Sp, коэффициент формы Φp, отклонение $\theta _{p}^{'}$ ориентации от средней по кадру) для каждой группы-кандидата.
5. Применение решающего правила, основанного на геометрических характеристиках, для каждой группы-кандидата.
6. Расчет цветояркостных параметров (интенсивность Int(x, y), насыщенность цвета St(x, y)) для каждого пиксела групп-кандидатов, прошедших отбор на предыдущем этапе.
7. Применение решающего правила, основанного на цветояркостных характеристиках, для каждого пиксела из предыдущего этапа.
Для областей с неподвижным задним планом:
8. Расчет модифицированного коэффициента Сарле Km(x, y)для каждого пиксела данных областей (выполняется один раз за n кадров).
9. Расчет локальных пороговых значений c(x, y) для каждого пиксела данных областей.
10. Применение решающего правила обнаружения частиц осадков на фоне заднего плана видеоизображений.
Из описания предложенного алгоритма следует, что этап 8, на котором выполняется расчет модифицированного коэффициента Сарле, являющегося характеристикой формы временного распределения значений пиксела, выполняется один раз за n кадров. Следовательно, параметр n определяет объем выборки, от которого зависит точность оценки формы данного распределения [12]. Неправильно подобранное количество накопленных кадров приводит к росту числа необнаруженных алгоритмом частиц осадков или, наоборот, к увеличению числа пикселей, неправильно отнесенных к перекрытым каплями или снежинками. Таким образом, одной из целей экспериментальных исследований, представленных в следующем разделе, является определение оптимального значения n для видеоизображений с осадками в виде дождя и снега.
5. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПРЕДЛОЖЕННОГО АЛГОРИТМА
С целью анализа качества алгоритмов обнаружения используют, как правило, вероятности ошибок первого и второго рода, выражения для оценки которых имеют вид [17, 18]:
Установлено, что выбор числа кадров n влияет на точность определения как значения модифицированного коэффициента Сарле, так и локальных пороговых значений, поэтому вероятности ошибок первого и второго рода оценены отдельно для восьмого (K18 и K28) и девятого (K19 и K29) этапов алгоритма.
Поскольку применяемые критерии качества являются конфликтующими, для определения оптимального решения (числа накопленных кадров) целесообразно использовать двухкритериальный подход [19]. В данном методе осуществляется максимизация или минимизация весовой суммы выбранных показателей качества, называемой целевой функции J. При этом весовые коэффициенты для вероятностей ошибок первого рода определим чуть большими, чем для вероятностей ошибок второго рода, с целью снизить количество точек, неправильно классифицированных алгоритмом как затронутые частицами осадков, и затем подвергшихся ненужной обработке. Такой выбор приводит к целевой функции, описываемой выражением:
При вычислении K18 и K28 использованы временные распределения 10 000 пикселей (10 000 точек “длительностью” n кадров каждая), принадлежащих участкам с атмосферными осадками кадров видеоизображений, и 10 000 временных распределений пикселей участков видеосцены с отсутствием дождя или снега в течение n кадров. А K19 и K29 вычислены на основе данных о 500 точках, искаженных и неискаженных частицами осадков на текущих кадрах. Небольшое число исследуемых пикселей при оценке девятого этапа алгоритма обусловлено необходимостью “зрительного” отбора данных точек. Значения K18, K28, K19, K29 и J рассчитаны при накоплении (то есть изменении n) от 40 до 210 кадров с частотой 25 кадров/с отдельно для видеоизображений с осадками в виде дождя и снега.
В результате экспериментальных исследований предложенного алгоритма, реализованного в среде MATLAB [20], определены оптимальные значения параметра n: 100 кадров для осадков в виде дождя и 140 кадров – в виде снега. Данное различие обусловлено более быстрым падением капли дождя в сравнении со снежинкой, и, как следствие, необходимостью большего накопления кадров для обработки видеопоследовательностей со снегом.
Также выполнены сравнения предложенного и рассмотренных известных подходов к детектированию атмосферных осадков на областях видеоизображений, содержащих и не содержащих движущиеся объекты. Значения критериев качества сравниваемых алгоритмов приведены в табл. 1 и 2.
При обработке участков видеокадров с движущимися объектами установлен выигрыш предложенного алгоритма по критерию K2 в пределах 1.7…6.6%, а по критерию K1 – до 1.7%. При обнаружении частиц осадков на неподвижном заднем плане предложенный подход позволяет уменьшить оценку вероятности ошибок второго рода на 4.5…9.1% при неизменной или немного улучшенной (до 0.8%) оценке вероятности ошибок первого рода.
5. ЗАКЛЮЧЕНИЕ
Предложен алгоритм детектирования капель дождя и снежинок на видеоизображениях, отличающийся от известных подходов обоснованием решающих правил выделения соответствующих пикселей с использованием результатов статистического анализа геометрических, цветояркостных и временных характеристик частиц атмосферных осадков, а также разработанной процедурой многоступенчатой классификации пикселей. Так, на первом этапе производится разделение кадра на участки с подвижными объектами и области с относительно постоянным во времени задним планом. Далее для участков первого типа производится классификация пикселей на движущиеся и неподвижные объекты с использованием порогового сравнения трех последовательных кадров. Для групп пикселей, соответствующих подвижным объектам, в том числе частицам осадков, выполняется расчет геометрических и цветояркостных параметров. С помощью разработанных решающих правил осуществляется финальная классификация пикселей на точки, принадлежащие каплям/снежинкам, и точки других движущихся объектов. Для областей кадров второго типа – с неподвижным задним планом – выполняется детектирование участков, в которых наблюдается прохождение осадков в течение определенного количества накопленных кадров, а затем рассчитываются локальные пороговые значения, с использованием которых выполняется обнаружение точек, затронутых частицами осадков в каждом текущем кадре. По результатам экспериментального исследования определены оптимальные значения числа накопленных кадров: 100 кадров для видеоизображений с дождем; и 140 кадров для видео со снегом. Установлено, что при обработке участков видеоизображений с подвижными объектами выигрыш разработанного алгоритма по сравнению с известными подходами [2–4] составляет 1.7…6.6% по критерию K2 и до 1.7% по критерию K1. А при обнаружении частиц осадков на неподвижном заднем плане подтвержден выигрыш 4.5…9.1% по вероятности ошибок второго рода.
Список литературы
Визильтер Ю.В., Желтов С.Ю., Бондаренко А.В., Осоков М.В., Моржин А.В. Обработка и анализ изображений в задачах машинного зрения: Курс лекций и практических занятий. М.: Физматкнига, 2010. 672 с.
Garg K., Nayar S.K. Vision and rain // International Journal of Computer Vision. 2007. V. 75. № 1. P. 3–27.
Jia Z., Wang H., Caballero R.E., Xiong Z., Zhao J., Finn A. A two-step approach to see-through bad weather for surveillance video quality enhancement // Machine Vision and Applications. 2012. V. 23. № 6. P. 1059–1082.
Brewer N., Liu N. Using the shape characteristics of rain to identify and remove rain from video // Joint IAPR International Workshops on Statistical Techniques in Pattern Recognition (SPR) and Structural and Syntactic Pattern Recognition (SSPR). Berlin, Heidelberg: Springer, 2008. P. 451–458.
Bossu J., Hautiere N., Tarel J. Rain or Snow Detection in Image Sequences through use of a Histogram of Orientation of Streaks // International Journal of Computer Vision. 2011. № 93.
Кириллов С.Н., Покровский П.С., Бауков А.А. Алгоритм уменьшения влияния атмосферных осадков на качество видеоизображений в системах управления // Сб. тез. докл. научно-техн. конф. “Техническое зрение в системах управления – 2019”. 2019. С. 34–35.
Pearson K. Contributions to the Mathematical Theory of Evolution. Skew Variations in Homogeneous Material // Philosophical Transactions of the Royal Society of London. Ser. A. 1895. V. 186. P. 343–414.
Тихонов В.И. Статистическая радиотехника. М.: Радио и связь, 1982. 624 с.
Голик Ф.В. Аппроксимация кривыми Пирсона плотности распределения суммы независимых одинаково распределенных случайных величин // Кибернетика и программирование. 2017. № 2. С. 17–41.
Гончаров В.А. Методы оптимизации. М., 2008. 188 с.
Lagarias J.C., Reeds J.A., Wright M.H., Wright P.E. Convergence Properties of the Nelder-Mead Simplex Method in Low Dimensions // SIAM Journal of Optimization. 1998. V. 9. № 1. P. 112–147.
Гмурман В.Е. Теория вероятностей и математическая статистика. М.: Высш. шк., 2003. 479 с.
Вероятность и математическая статистика: Энциклопедия / Под ред. Ю.В. Прохорова. М.: Большая Российская энциклопедия, 2003. 912 с.
Вадзинский Р.Н. Справочник по вероятностным распределениям. СПб.: Наука, 2001. 295 с.
Гонсалес Р., Вудс Р. Цифровая обработка изображений. М.: Техносфера, 2012. 1104 с.
Pfister R., Schwarz K.A., Janczyk M., Dale R., Freeman J. Good things peak in pairs: a note on the bimodality coefficient // Frontiers in psychology. 2013. V. 4.
Савинов А.Н., Иванов В.И. Анализ решения проблем возникновения ошибок первого и второго рода в системах распознавания клавиатурного почерка // Вестник ВУиТ. 2011. № 18.
Статистические методы. Вероятность и основы статистики. Термины и определения. ГОСТ Р 50779.10-2000. М.: Госстандарт России, 2001. 42 с.
Лисничук А.А., Батищев А.В. Двухкритериальный синтез OFDM-сигналов для повышения энергетической эффективности и помехоустойчивости // Вестник РГРТУ. 2021. № 76. С. 3–16.
Гонсалес Р., Вудс Р., Эддинс Р. Цифровая обработка изображений в среде MATLAB. М.: Техносфера, 2006. 616 с.
Дополнительные материалы отсутствуют.
Инструменты
Программирование