

Известия РАН. Серия физическая, 2023, T. 87, № 3, стр. 359-367
Динамика вектора намагниченности свободного слоя спинового вентиля с планарной анизотропией под действием магнитных полей произвольного направления
Ю. А. Юсипова 1, *, В. А. Скиданов 1
1 Федеральное государственное бюджетное учреждение науки
“Институт проблем проектирования в микроэлектронике Российской академии наук”
Москва, Россия
* E-mail: linda_nike@mail.ru
Поступила в редакцию 28.09.2022
После доработки 27.10.2022
Принята к публикации 25.11.2022
- EDN: HGBKQN
- DOI: 10.31857/S0367676522700636
Аннотация
Выполнено моделирование динамики вектора намагниченности активного слоя спин-вентильной структуры с планарной анизотропией слоев в магнитном поле произвольного направления. Проведенный бифуркационный анализ динамической системы позволил определить условия смены типа особых точек системы и классифицировать динамику намагниченности по типам.
ВВЕДЕНИЕ
В 1988 году был обнаружен эффект гигантского магнетосопротивления (ГМС), суть которого состоит в изменении электрического сопротивления тонких многослойных магнитных сверхрешеток (спин-вентильные структуры) под воздействием магнитного поля. Внедрение эффекта ГМС в технологию считывающих головок накопителей на магнитных жестких дисках (HMDD) привело к росту плотности записи до 4 Tбит/дюйм2, уменьшению размеров HMDD до 0.85 дюймов в диаметре и увеличению емкости жестких дисков до 40 Тбайт [1]. Исследования переключения спин-вентильных структур с помощью спин-поляризованного тока Дж. Слончевским [2] открыли путь для разработки магниторезистивной памяти с произвольным доступом (MRAM) [3, 4]. В этом случае спиновые вентили используются в качестве ячейки памяти, а не считывающего элемента как в HMDD [1]. Разработки в области спинтроники и наномагнетизма оказывают огромное влияние на технику устройств хранения, чтения и записи информации. В частности, было показано, что спиновые вентили могут быть интегрированы в блоки, которые реализуют как булеву, так и небулеву логику [5].
Совместное влияние спин-поляризованного тока и магнитного поля на спин-вентильные структуры могут индуцировать автоколебания электрического сопротивления. Этот процесс является фундаментальным в спин-вентильных нано-осцилляторах (STNO), где изменение сопротивления преобразуется в колебания напряжения в гигагерцовом диапазоне [6, 7]. Биосенсоры на основе спиновых вентилей перспективны для использования в биомедицине в качестве молекулярно-диагностических экспресс-тестов различных заболеваний [1].
Малые размеры, совместимость с КМОП-технологией, хорошая масштабируемость и разнообразие режимов работы позволяют спиновым вентилям стать универсальными компонентами современной микроэлектроники.
Теоретическому анализу эффекта переключения и осцилляций спин-вентильных структур посвящено множество работ, например [2, 6–15]. При этом рассматривались различные конфигурации магнитных сверхрешеток, такие как пятислойная магнитная сверхрешетка [2], туннельный магнитный переход [6–8, 12], классический спиновый вентиль с различными конфигурациями анизотропии ферромагнитных слоев [9–15], а также параллельные или перпендикулярные оси анизотропии направления магнитного поля [13‒15]. В работе [15] рассмотрена динамика намагниченности свободного слоя спинового вентиля с перпендикулярной анизотропией слоев в магнитном поле произвольного направления и найдено множество режимов его работы, являющихся базовыми для различных применений в микроэлектронных устройствах. Однако, динамические режимы работы спинового вентиля с планарной анизотропией слоев в магнитном поле, направление которого не параллельно или перпендикулярно оси анизотропии ранее не рассматривались.
Основной задачей данной статьи является исследование динамики намагниченности подобной структуры с планарной анизотропией слоев управляемой передачей спинового вращательного момента и магнитными полями различной конфигурации с целью нахождения новых режимов работы, которые могут представлять практический интерес.
ОСНОВНЫЕ УРАВНЕНИЯ
Рассмотрим магнитную трехслойную сверхрешетку FM1/NM/FM2, состоящую из двух кобальтовых слоев (закрепленного FM1 и свободного FM2) и медной немагнитной прослойки NM, близкую к структурам, рассмотренным в работах [3, 9–15]. Поперечное сечение вентиля представляет собой квадрат со стороной d0 = 11 нм [4]. Оси OX и OY системы декартовых координат, связанных со структурой, ориентированы вдоль сторон квадрата, ось OZ перпендикулярна плоскости слоев. Ось легкого намагничивания ферромагнитных слоев параллельна OX. Толщина ферромагнитного слоя FM1 dFM1 = 5 нм, толщина свободного слоя dFM2 в расчетах принята равной 2 нм, а толщина медной немагнитной прослойки dNM = = 1.2 нм. Вектор намагниченности закрепленного слоя ${{\vec {M}}_{1}}~$ фиксирован и направлен вдоль оси OХ. Вектор намагниченности свободного слоя ${{\vec {M}}_{2}}~$ может изменять свое направление, MX, MY, MZ – его проекции на соответствующие оси OX, OY, OZ. Электрический ток плотностью J пропускается перпендикулярно плоскости слоев противоположно оси OZ. Структура помещена во внешнее магнитное поле $\vec {H},$ вектор которого составляет углы φ и θ соответственно с осями OX и OZ.
Теоретическая модель явления, которое лежит в основе работы спинового вентиля, базируется на фундаментальном уравнении Ландау–Лифшица–Гильберта (1), описывающем динамику вектора ${{\vec {M}}_{2}}$
(1)
$\frac{{d{{{\vec {M}}}_{2}}}}{{dt}} = --\left| \gamma \right|{{\mu }_{0}}\left[ {{{{\vec {M}}}_{2}} \cdot {{{\vec {H}}}_{{{\text{эф}}}}}} \right] + \frac{\alpha }{{{{M}_{s}}}}\left[ {{{{\vec {M}}}_{2}} \cdot \frac{{d{{{\vec {M}}}_{2}}}}{{dt}}} \right],$После некоторых алгебраических преобразований и нормировки переменных $\vec {h}$ = $\vec {H}$/Ms, $\vec {m}$ = = ${{\vec {M}}_{2}}$/Ms, τ = tγµ0Ms/(1 + α2), k = ${{2K} \mathord{\left/ {\vphantom {{2K} {\left( {{{\mu }_{0}}M_{s}^{2}} \right)}}} \right. \kern-0em} {\left( {{{\mu }_{0}}M_{s}^{2}} \right)}},$ система (1) может быть преобразовано в координатную форму (2)
БИФУРКАЦИОННЫЕ ДИАГРАММЫ
Важной характеристикой динамических систем дифференциальных уравнений являются их особые точки. Определение количества, координат и типов особых точек позволяет провести классификацию динамики вектора ${{\vec {M}}_{2}}$ и выделить наиболее интересные ее типы.
Для определения координат особых точек вектора ${{\vec {M}}_{2}}$ левые части уравнений системы (2) должны быть приравнены нулю. Полученная система алгебраических уравнений должна быть разрешена относительно переменных mx, my, mz. Тип особой точки определяется собственными числами матрицы линеаризации системы (2) в окрестности особой точки. Так как фазовое пространство исследуемой системы представляет собой сферическую поверхность, то классификация особых точек в данном случае совпадает с классификацией положений равновесия на плоскости, и для определения типа особой точки достаточно двух собственных чисел [13–15].
При H = 0 и J = 0 система (2) имеет шесть особых точек (точек равновесия) на поверхности единичной сферы, а именно: T1, 2(±1, 0, 0) типа устойчивый фокус (УФ), T3, 4(0, 0, ±1) типа неустойчивый фокус (НФ) и седла (С) – T5, 6(0, ±1, 0), что совпадает с данными, полученными в работах [3, 13–15]. При приложении магнитного поля и тока особые точки Т1–6 изменяют свои координаты и типы.
На рис. 1 изображены бифуркационные диаграммы для спинового вентиля на основе кобальта в магнитных полях различных направлений, рассчитанные в программной среде MATLAB. Линия L1 ограничивает области существования точки T1 (обл. 1–22, 25–31). Положение равновесия T2 существует в областях 1–18, 23, 24, 32–35, расположенных левее линии L2. Линия L3 ограничивает области существования точек T4 и T5 (обл. 1–5, 9–27, 33–35). До пересечения с линией L8 линия L4 ограничивает области существования положения равновесия T4 (обл. 1–5, 9–12, 19–27, 31, 33, 34), а после пересечения – отделяет области 6, 9, 13, 14, где точка T1 имеет тип неустойчивый узел (НУ), от областей 2–5, 7, 8, 10–12, 15–20, 22, 26, 27, 30, 31, где T1 – НФ. Линия бифуркации L5, исходящая из точки пересечения L7 и L4, также ограничивает области существования точки T4. До пересечения с линией L4 линия L8 ограничивает области существования особых точек T3 и T5 (обл. 1–5, 13–18, 23, 24), а после пересечения – отделяет область 35, где существует положение T5. Области существования особой точки T6 располагаются между линиями L5 и L11 (обл. 1–5, 9–12, 19–22, 28).
Рис. 1.
Бифуркационные диаграммы для спинового вентиля на основе кобальта: φ = π/4, θ = π/4 (а); φ = π/4, θ = π/3 (б); φ = π/4, θ = π/2 (в); φ = 5π/12, θ = π/4 (г); φ = 5π/12, θ = π/3 (д); φ = 5π/12, θ = π/2 (е).
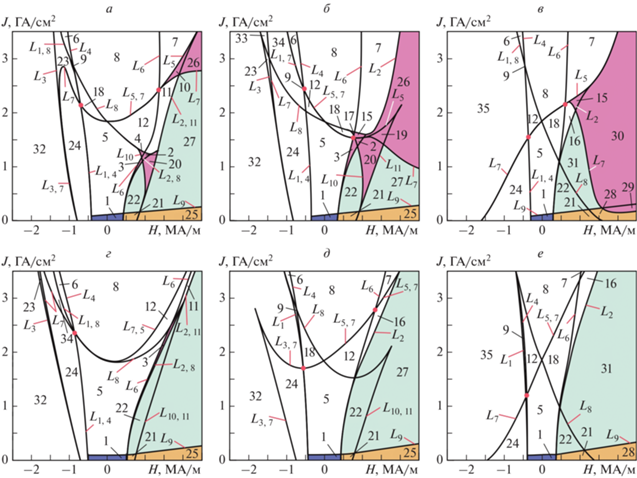
В областях 2, 3, 7, 10, 11, 15, 16, расположенных левее линии L6 положение равновесия T2 становится устойчивым узлом (УУ), а правее линии L6 имеет тип УФ (обл. 1, 4–6, 8, 9, 12–14, 17, 18, 23, 24, 32–35). До пересечения с линией L6 линия L7 ограничивает область 23, где особая точка T4 принимает тип НУ, а после пересечения – отделяет области 10, 19, 26, где точка T4 становиться устойчивой и имеет тип УФ. В областях 1–5, 9, 11, 12, 20–22, 24, 25, 27, 34 расположенных ниже линии L7 точка T4 имеет тип НФ. Линия L9 является линией устойчивости точки T1, ниже нее лежат области 1, 21, 25, 28 и 29, где точка T1 принимает тип УФ. Линия L10 является линией устойчивости точки T3, в областях 2, 4, 15, 17, 19, 20, 29, 30, расположенных правее L10, где точка T3 принимает тип УФ.
ДИНАМИКА ВЕКТОРА НАМАГНИЧЕННОСТИ
На рис. 2–4 показаны некоторые типы динамики вектора ${{\vec {M}}_{2}},$ наблюдаемые в магнитных полях произвольного направления при положительном направлении тока.
Рис. 2.
Переключение спинового вентиля с одним вероятным исходом: переключение в точку T1 (1S1) (а); переключение в точку T2 (1S2) (б); переключение в точку T3 (1S3) (в); переключение в точку T4 (1S4) (г).
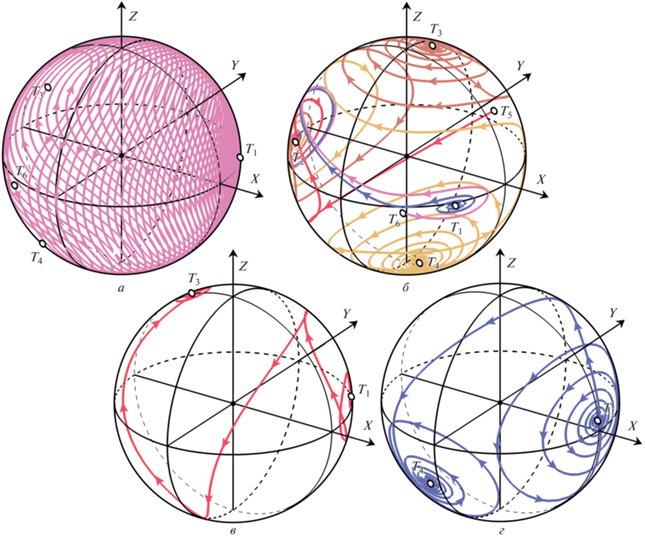
Рис. 3.
Переключение вектора намагниченности с двумя вероятными исходами: переключение в точку T1 или T2 (2S1, 2) (а); переключение в точку T2 или T3 (2S2, 3) (б); переключение в точку T2 или T4 (2S2, 3) (в); переключение в точку T3 или T4 (2S3, 4) (г).
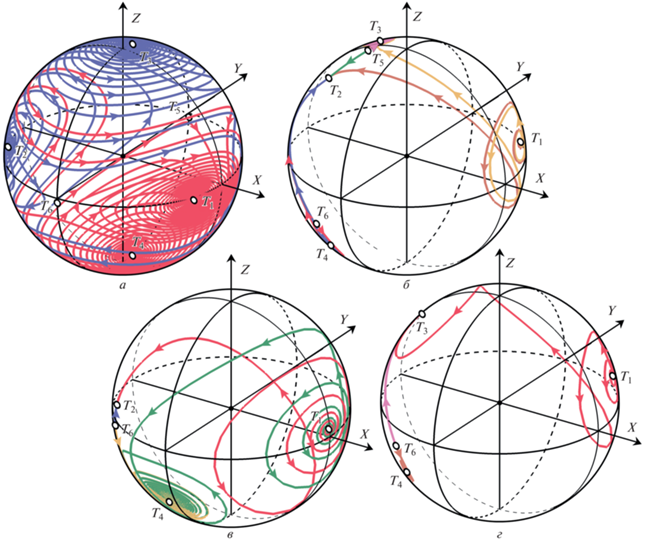
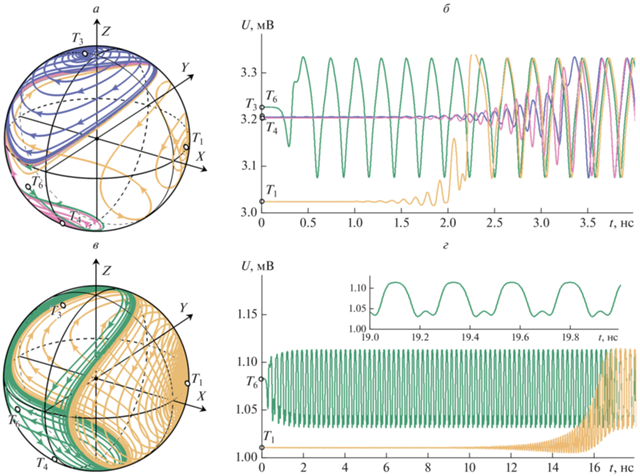
Рис. 4.
Динамика вектора намагниченности свободного слоя спинового вентиля с предельными циклами: динамика типа LC (a) и ВСХ (б) при φ = π/4, θ = π/2, H = 75.2 кА ⋅ м–1, J = 0.67 ГА ⋅ cм–2; динамика типа LC (в) и ВСХ (г) при φ = π/4, θ = π/2, H = 0.70 МА ⋅ м–1, J = 0.22 ГА ⋅ cм–2.
На рис. 2 показаны режимы переключения спинового вентиля с единственным исходом. Этот тип динамики наблюдается, когда все особые точки, кроме одной, неустойчивы. В областях 21, 25, 28 (на рис. 1 закрашены желтым цветом), где точка T1 устойчива, наблюдается тип динамики “переключение в точку $T_{1}^{{''}}$ (1S1), показанный на рис. 2а, или переключение спинового вентиля в параллельное состояние. В данном случае, годограф ${{\vec {M}}_{2}}$ рассчитан при следующих параметрах: φ = π/4, θ = π/2, H = 1.12 МА ⋅ м–1, J = 74.8 МА ⋅ cм–2.
На рис. 2б представлена динамика вектора ${{\vec {M}}_{2}}$ для переключения спинового вентиля в антипараллельное состояние (1S2), рассчитанная при φ = π/4, θ =π/2, H = –0.28 МА ⋅ м–1, J = = 0.22 ГА ⋅ cм–2. В данном случае единственной устойчивой точкой является T2 (не закрашенные области 3, 5–9, 11–14, 16, 18, 23, 24, 32–35). Типы динамики 1S1 и 1S2 являются базовыми для работы считывающих головок HMDD и ячеек памяти MRAM [3, 4].
На рис. 2в изображен годограф, соответствующий переключению вектора ${{\vec {M}}_{2}}$ в положение равновесия T3 (1S3), рассчитанный для φ = π/4, θ = = π/2, H = 1.26 МА ⋅ м–1, J = 2.09 ГА ⋅ cм–2. Данный тип динамики наблюдается в областях 20 и 30, окрашенных в розовый цвет, где точка T3 имеет тип УФ.
В случае, когда единственным устойчивым положением равновесия является T4 (закрашенная розовым цветом область 26), наблюдается тип динамики с переключением в эту точку (1S4), представленный на рис. 2г. В данном случае, годографы вектора ${{\vec {M}}_{2}}$ рассчитаны при следующих параметрах: φ = 0, θ =5π/12, H = 1.26 МА ⋅ м–1, J = 0.90 ГА ⋅ cм–2.
Режимы переключения спинового вентиля с двумя вероятными исходами представлены на рис. 3. Такой тип динамики наблюдается, если у вектора ${{\vec {M}}_{2}}$ при данных параметрах существует четыре или шесть положений равновесия, два из которых являются устойчивыми.
На рис. 3а показана динамика вектора намагниченности с переключениями в точки T1 и T2 (2S1, 2), рассчитанная при φ = π/2, θ = 5π/12, H = = 75.2 кА ⋅ м–1, J = 42.0 МА ⋅ cм–2. Такой тип динамики наблюдается в области под номером 1 (фиолетовый цвет на рис. 1) и является основным для работы элементов вероятностной спиновой логики [1, 5, 13, 15]. Стоит отметить, что этот тип динамики встречается при любом направлении магнитного поля.
В областях 2, 4, 15 и 17 (розовый цвет на рис. 1), где устойчивыми положениями равновесия являются T2 и T3, наблюдается динамика вектора намагниченности ${{\vec {M}}_{2}}$ с вероятным переключением в эти точки (2S2, 3), изображенная на рис. 3б (φ = = π/4, θ = π/3, H = 0.87 МА ⋅ м–1, J = 1.48 ГА ⋅ cм–2).
На рис. 3в изображены годографы, соответствующие переключению вектора ${{\vec {M}}_{2}}$ с двумя вероятными исходами T2 и T4 (2S2, 4), рассчитанные для φ = 0, θ = 5π/12, H = 0.85 МА ⋅ м–1, J = 1.12 ГА ⋅ cм–2. Данный тип динамики наблюдается в закрашенной в розовый цвет области 10, где точка T2 и T4 имеют типы УУ и УФ, соответственно.
В случае, когда устойчивы положения равновесия T3 и T4 (обл. 19, розовый цвет на рис. 1), наблюдается тип динамики с вероятным переключением в эти точки (2S3, 4), представленный на рис. 3г. В данном случае, годографы вектора ${{\vec {M}}_{2}}$ рассчитаны при следующих параметрах: φ = π/4, θ = π/3, H = 1.40 МА ⋅ м–1, J = 1.61 ГА ⋅ cм–2.
Основным типом динамики спинового вентиля как STNO, является устойчивая прецессия вектора намагниченности ${{\vec {M}}_{2}},$ приводящая к периодическому изменению сопротивления спинового вентиля, что, в свою очередь, приводит к периодическому изменению выходного сигнала. Такой тип динамики возможен в областях 22, 27 и 31 (светло-зеленый цвет на рис. 1), где положения равновесия потеряли устойчивость, что, согласно теореме Адронова–Хопфа, приводит к рождению устойчивых предельных циклов вокруг них. Предельный цикл – это еще одно стационарное состояние системы, наряду с особой точкой, которое представляет собой замкнутую периодическую траекторию.
В магнитных полях, направление которых перпендикулярно оси анизотропии (при φ = π/2, θ = π/2 или θ = 0), вольт-секундные характеристики (ВСХ) прецессионных мод спинового вентиля по своему виду близки к синусоидальным [13]. В то время как в магнитных полях, параллельных оси анизотропии (φ = 0, θ = π/2), спиновый вентиль в режиме работы с предельными циклами выдает ВСХ близкие к пилообразным [13]. Методика расчета ВСХ подробно изложена в работах [3, 13, 15].
На рис. 4а и 4в показано два типа динамики вектора ${{\vec {M}}_{2}}$ с устойчивыми предельными циклами (LC) с двумя отличными от вышеперечисленных видами ВСХ (рис. 4б и 4г).
На рис. 4а представлен случай, когда особая точка T1 отделена от остальных устойчивым предельным циклом, при этом ВСХ в данном случае будет пилообразной (рис. 4б). Такой тип ВСХ наблюдается при малых полях (h <= k) в области 22. В случае, если точка T3 остается единственной по одну сторону от предельного цикла (рис. 4в), тогда ВСХ близка к синусоидальной с признаками начала процесса удвоения частоты (рис. 4г). Этот тип ВСХ характерен для больших полей (h > k) в области 22. Прецессионные моды, изображенные на рис. 4, возникают из-за того, что предельные циклы, по которым движется конец вектора ${{\vec {M}}_{2}},$ не симметричны относительно оси вращения. В областях 27 и 31, где существуют только две особые точки, возникающие предельные циклы симметричны относительно оси вращения, поэтому наблюдаются ВСХ близкие к синусоидальным.
В области 29 существует всего две особые точки T1 и T3, которые имеют тип УФ, вокруг которых образуется неустойчивый предельный цикл (ULC). Аналогично неустойчивым предельным циклам, такие стационарные траектории рождаются вокруг особых точек, приобретающих устойчивость.
Соответствие между номерами областей бифуркационной диаграммы, изображенной на рис. 1, типами особых точек, существующих в них, и типами динамики вектора намагниченности свободного слоя спинового вентиля, наблюдаемых в этих областях представлено в табл. 1. На рис. 1 закрашены области с основными типами динамики, как то, переключение и прецессия намагниченности.
Таблица 1.
Соответствие между номерами областей на рис. 1, типами особых точек и типами динамики в них
| Обл. рис. 1. |
Тип особых точек | Тип динамики |
|||||
|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | T6 | ||
| 1 | УФ | УФ | НФ | НФ | С | С | 2S1,2 |
| 2 | НФ | УУ | УФ | НФ | С | С | 2S2,3 |
| 3 | НФ | УУ | НФ | НФ | С | С | 1S2 |
| 4 | НФ | УФ | УФ | НФ | С | С | 2S2,3 |
| 5 | НФ | УФ | НФ | НФ | С | С | 1S2 |
| 6 | НУ | УФ | – | – | – | – | 1S2 |
| 7 | НФ | УУ | – | – | – | – | 1S2 |
| 8 | НФ | УФ | – | – | – | – | 1S2 |
| 9 | НУ | УФ | – | НФ | – | С | 1S2 |
| 10 | НФ | УУ | – | УФ | – | С | 2S2,4 |
| 11 | НФ | УУ | – | НФ | – | С | 1S2 |
| 12 | НФ | УФ | – | НФ | – | С | 1S2 |
| 13 | НУ | УФ | НУ | – | С | – | 1S2 |
| 14 | НУ | УФ | НФ | – | С | – | 1S2 |
| 15 | НФ | УУ | УФ | – | С | – | 2S2,3 |
| 16 | НФ | УУ | НФ | – | С | – | 1S2 |
| 17 | НФ | УФ | УФ | – | С | – | 2S2,3 |
| 18 | НФ | УФ | НФ | – | С | – | 1S2 |
| 19 | НФ | – | УФ | УФ | – | С | 2S3,4 |
| 20 | НФ | – | УФ | НФ | – | С | 1S3 |
| 21 | УФ | – | НФ | НФ | – | С | 1S1 |
| 22 | НФ | – | НФ | НФ | – | С | LC |
| 23 | – | УФ | НФ | НУ | С | – | 1S2 |
| 24 | – | УФ | НФ | НФ | С | – | 1S2 |
| 25 | УФ | – | – | НФ | – | – | 1S1 |
| 26 | НФ | – | – | УФ | – | – | 1S4 |
| 27 | НФ | – | – | НФ | – | – | LC |
| 28 | УФ | – | – | – | – | НФ | 1S1 |
| 29 | УФ | – | УФ | – | – | – | ULC |
| 30 | НФ | – | УФ | – | – | – | 1S3 |
| 31 | НФ | – | НФ | – | – | – | LC |
| 32 | – | УФ | НФ | – | – | – | 1S2 |
| 33 | – | УФ | – | НУ | – | – | 1S2 |
| 34 | – | УФ | – | НФ | – | – | 1S2 |
| 35 | – | УФ | – | – | НФ | – | 1S2 |
ЗАКЛЮЧЕНИЕ
Предложена модель, описывающая работу трехслойной спин-вентильной структуры в магнитном поле произвольного направления. Проведен бифуркационный анализ системы уравнений, описывающей динамику вектора намагниченности, который позволил выявить особенности процессов переключения и прецессии вектора намагниченности. Выделено четыре типа переключения вектора намагниченности с двумя вероятными исходами (2S1, 2, 2S2, 3, 2S2, 4, 2S3, 4) и четыре типа переключения в единственное устойчивое положение равновесия (1S1, 1S2, 1S3, 1S4). Выявлено несколько прецессионных мод (LC) с тремя различными видами ВСХ – пилообразной, синусоидальной и синусоидальной с признаками начала процесса удвоения частоты, и определены условия их наблюдения.
Режим работы спинового вентиля с двумя вероятными исходами 2S2, 3, 2S2, 4, 2S3, 4 еще не нашли свое применение в микроэлектронике, но могут представлять практический интерес для разработок в сфере вероятностной спиновой логики. Переключение спинового вентиля в антипараллельное (1S2) или параллельное состояние (1S2) являются базовыми в работе устройств памяти, так как положения равновесия T1 и T2 являются стационарными при нулевых токе и поле и позволяют сохранять информацию. В то же время, режимы работы 1S3 и 1S4 могут быть использованы в работе спин-вентильных биосенсоров, где переключение производится с помощью магнитного поля наночастиц. Прецессионные моды с различными несинусоидальными ВСХ могут быть использованы для создания многофункциональных генераторов сигналов специальной формы.
Список литературы
Iusipova Iu.A., Popov A.I. // Semiconductors. 2021. V. 13. P. 1008.
Slonczewski J.C. // J. Magn. Magn. Mater. 1995. V. 159. Art. No. L1.
Iusipova Iu.A. // Probl. Persp. Micro Nanoelectr. Syst. Develop. 2020. No. 2. P. 110.
Nowak J.J., Robertazzi R.P., Sun J.Z. et al. // IEEE Magn. Let. 2016. V. 7. Art. No. 3102604.
Sutton B., Camsari K.Y., Behin–Aein B., Datta S. // Sci. Reports. 2017. V. 7. No. 1. P. 1.
You Ch.Y. // J. Magn. 2009. V. 14. No. 4. P. 168.
Митрофанов А.А., Сафин А.Р., Удалов Н.Н. // Письма в ЖТФ. 2014. Т. 40. № 13. С. 66; Mitrofanov А.А., Safin А.R., Udalov N.N. // Tech. Phys. Lett. 2014. V. 40. No. 7. P. 571.
Kulagin N., Korneev V., Popkov A., Demin G. // Acta Phys. Polon. A. 2014. V. 127. No. 2. P. 463.
Grollier J., Cros V., Fert A. et al. // Phys. Rev. B. 2003. V. 67. Art. No. 174402.
Bertotti G., Serpico C., Mayergoyz I.D. et al. // Phys. Rev. B. 2005. V. 94. Art. No. 127206.
Grollier J., Cros V., Hamzic A., George J.M. et al. // Appl. Phys. Lett. 2001. V. 78. No. 23. P. 3666.
Tsymbal E.Y., Žutić I. Handbook of spin transport and magnetism. Boca Raton: CRC Press Taylor & Francis Group, 2012. 777 p.
Юсипова Ю.А. // ФТТ. 2020. Т. 62. № 9. С. 1361; Iusipova Iu.A. // Phys. Solid State. 2020. V. 62. No. 9. P. 1525.
Ostrovskaya N.V., Iusipova Iu.A. // Phys. Met. Metallogr. 2019. V. 120. No. 13. P. 1291.
Iusipova Iu.A. // IEEE Magn. Lett. 2022. V. 13. Art. No. 4501605.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Серия физическая