

Космические исследования, 2023, T. 61, № 2, стр. 163-176
Оптимальное управление вектором тяги воздушного электрореактивного двигателя для наискорейшего изменения высоты апогея орбиты с ультранизким перигеем
А. С. Филатьев 1, 2, О. В. Янова 2, 3, *
1 Московский государственный университет имени М.В. Ломоносова
Москва, Россия
2 Московский авиационный институт
Москва, Россия
3 Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского
Жуковский, Московская обл., Россия
* E-mail: yanova2007@yandex.ru
Поступила в редакцию 20.07.2022
После доработки 04.10.2022
Принята к публикации 08.10.2022
- EDN: LTTYMJ
- DOI: 10.31857/S0023420622600222
Аннотация
Рассмотрена задача оптимального по быстродействию изменения высоты апогея орбит с ультранизким перигеем (высотой 120–250 км). Для компенсации аэродинамического сопротивления космического аппарата используется воздушный электрореактивный двигатель (ВЭРД), топливом для которого служат газы забортной атмосферы. Учтено падение эффективности ВЭРД с увеличением угла атаки и возможность работы ВЭРД только при достаточной концентрации газа в камере ионизации. Задача решена на основе принципа максимума Понтрягина в предположении малости аэродинамического сопротивления и тяги по сравнению с гравитационными силами. Представлены результаты исследований оптимальных программ управления вектором тяги ВЭРД в зависимости от параметров орбиты, компоновки КА, двигателя и мощности источника энергии.
ВВЕДЕНИЕ
Значительное повышение эффективности выполнения космическими аппаратами (КА) целевых задач может быть обеспечено за счет использования ультранизких околоземных орбит высотой 120–250 км (УНОО) [1–3].
Для компенсации аэродинамического сопротивления на таких орбитах могут использоваться воздушные электрореактивные двигатели (ВЭРД), в которых топливом служат газы окружающей атмосферы [4–13]. В общем случае ВЭРД включают: воздухозаборник (ВЗ), обеспечивающий захват атмосферного газа; термализатор (накопитель), в котором частицы газа тормозятся до тепловых скоростей; ионизационную камеру (ИК), в которой газ ионизируется; зону разгона, в которой ионизированный газ ускоряется в электромагнитном поле; и нейтрализатор эжектируемой плазменной струи. Для функционирования последних трех систем необходим источник энергии (ИЭ), в качестве которого предполагается использовать солнечные батареи (СБ).
Отказ от запасенного топлива позволит повысить срок активного существования и эффективность выполнения задач наблюдения земной поверхности и связи. В то же время использование ВЭРД требует решения ряда проблем, связанных с особенностями орбитального полета на ультранизких высотах: значительно возросшим влиянием аэродинамических сил и аномалий гравитационного поля Земли.
Задачи оптимального управления низкоорбитальными КА с ВЭРД рассмотрены в ряде работ. В работах [6, 7] решалась задача оптимального управления тягой ВЭРД за счет изменения скорости истечения реактивной струи для поддержания КА на круговой УНОО, включая оптимизацию высоты орбиты в исследовании [7]. Оптимизация проводилась на основе принципа максимума Понтрягина [14] в предположении постоянных мощности бортового источника энергии и коэффициента аэродинамического сопротивления с учетом несферичности Земли. В работе [9] получены оценки требуемой тяги и предложен алгоритм адаптивного управления тягой электроракетного двигателя (ЭРД) для компенсации возмущений, обусловленных аэродинамическим сопротивлением КА и солнечной радиацией на круговых околоземных орбитах высотой 150–450 км. Работа [10] посвящена анализу реализуемости полета на УНОО на основе статистического моделирования орбитального движения КА с адаптивным управлением тягой ЭРД на околоземных слабоэллиптических орбитах (разность высот апогея и перигея не превышает 9 км) высотой 160 и 225 км. В публикации [11] представлен обзор предложений по управлению аэродинамическим качеством аппарата для поддержания заданной орбиты, стабилизации КА, маневрирования для предотвращения столкновений с различными объектами, фазирования и схода с орбиты.
Оптимизация управления вектором тяги КА c ВЭРД рассматривалась авторами в работах [15–18]. В исследованиях [15–17] задачи максимизации изменения высоты апогея и изменения наклонения орбит сведены к поиску локально оптимального управления, обеспечивающего максимальную скорость изменения максимизируемых параметров в каждый момент времени с учетом малости влияния на функционал возмущающего ускорения по сравнению с гравитационным. Эффективность оптимальности программы управления с подобным критерием при решении задачи в детерминированной постановке может рассматриваться как мера потенциальной возможности компенсации случайных возмущений. Переход к локальной оптимизации управления позволил получить аналитические соотношения для синтеза управления КА с ВЭРД и его эффективности в предположении постоянных скорости истечения и аэродинамического сопротивления без учета зависимости тяги ВЭРД от угла между продольной осью КА и вектором скорости (угла атаки) и ограничения на допустимый уровень концентрации газа в ИК.
Эффективность тяги ВЭРД существенно зависит от угла атаки вследствие уменьшения эффективной площади входа в ВЗ в плоскости, перпендикулярной вектору скорости, и относительного числа молекул, пролетающих через ВЗ без столкновения с его стенками при наличии угла атаки [8, 13, 19, 20]. В работе [18] при “локальной” оптимизации управления учитывалось снижение тяги при ненулевых углах атаки из-за изменения эффективной площади входа в ВЗ.
В настоящей работе рассматривается задача оптимального управления вектором тяги КА с ВЭРД для максимизации изменения высоты апогея орбиты с ультранизкой начальной высотой перигея с учетом ограничения на допустимый уровень концентрации газа в ИК и зависимости тяги ВЭРД и аэродинамического сопротивления от угла атаки КА. Решение задачи получено на основе принципа максимума Понтрягина [14] в предположении малости изменения параметров орбиты в правых частях уравнений движения за один виток. Приведены результаты исследований оптимальных программ управления углом атаки и тягой в зависимости от параметров задачи: начальной высоты перигея и апогея, скорости истечения, параметров компоновки КА.
ПОСТАНОВКА ЗАДАЧИ
Рассматривается движение центра масс КА с ВЭРД в плоскости эллиптической орбиты с начальными высотами перигея hπi и апогея hαi. Задача состоит в определении оптимального управления вектором тяги ВЭРД для максимального изменения высоты апогея hα без изменения высоты перигея hπ с учетом зависимости тяги и аэродинамического сопротивления от угла атаки и ограничения на допустимую концентрацию газа в ИК. Требование равенства конечной высоты перигея ее начальному значению обусловлено ограничениями на высоту полета КА с ВЭРД [16]. Ограничение сверху на высоту полета КА с ВЭРД следует из необходимости создания давления газа в камере ионизации не менее 5 · 10–5 торр для стабильной работы ВЭРД [4]. Ограничение снизу определяется располагаемой мощностью ИЭ (СБ) для компенсации аэродинамического сопротивления КА: ниже некоторой высоты не удается обеспечить требуемую мощность электропитания для создания тяги, так как увеличение площади СБ в свою очередь еще более увеличивает сопротивление.
Движение центра масс КА описывается в геоцентрической инерциальной системе координат с началом координат в центре Земли. Ось Ox направлена в перигей орбиты (в случае круговой орбиты – по начальному радиус-вектору), ось Oy параллельна вектору скорости в перигее орбиты.
Приняты следующие допущения:
1. Нормальная аэродинамическая сила пренебрежимо мала.
2. Скорость с истечения реактивной струи ВЭРД постоянна: c = const.
3. Вектор тяги ВЭРД направлен вдоль продольной оси КА.
4. Масса КА постоянна: m = const.
5. Форма Земли сферическая.
Замечание. Допущение о сферической форме Земли основано на инвариантности аэродинамического сопротивления КА и тяги ВЭРД по отношению к плотности атмосферы (см. далее соотношения для расчета тяги и сопротивления (5), (6)). Это принципиально важное отличие ВЭРД от электроракетного двигателя, поскольку плотность атмосферы даже при движении по круговой орбите может меняться во много раз.
С учетом соотношений [21]
и уравнений в оскулирующих переменных [22] запишем уравнения для изменения по времени радиуса перигея hπ, радиуса апогея hα, электрической энергии E для создания тяги и истинной аномалии ϑ:(2)
$\left. {\begin{array}{*{20}{c}} {\frac{{{\text{d}}{{r}_{\pi }}}}{{{\text{d}}t}} = \frac{1}{V}\left[ {{{a}_{t}}\frac{{2p}}{{{{{(1 + e)}}^{2}}}}(1 - {\text{cos}}{\kern 1pt} \vartheta ) + {{a}_{s}}r{\kern 1pt} {\text{sin}}{\kern 1pt} \vartheta } \right],} \\ {\frac{{{\text{d}}{{r}_{\alpha }}}}{{{\text{d}}t}} = \frac{1}{V}\left[ {{{a}_{t}}\frac{{2p}}{{{{{(1 - e)}}^{2}}}}(1 + {\text{cos}}{\kern 1pt} \vartheta ) - {{a}_{s}}r{\kern 1pt} {\text{sin}}{\kern 1pt} \vartheta } \right],} \\ {\frac{{{\text{d}}E}}{{{\text{d}}t}} = {{W}_{P}},} \\ {\frac{{{\text{d}}\vartheta }}{{{\text{d}}t}} = \frac{{\sqrt p }}{{{{r}^{2}}}},} \end{array} } \right\}$Переменные в выражении (2) и далее используются в безразмерном виде, причем старые обозначения переменных сохраняются:
(3)
$\left. \begin{gathered} r = {{\left( {\frac{r}{{{{R}_{{\text{E}}}}}}} \right)}_{d}},\,\,\,\,V = {{\left( {\frac{V}{{{{V}_{R}}}}} \right)}_{d}},\;\,\,m = {{\left( {\frac{m}{{{{m}_{i}}}}} \right)}_{d}}, \hfill \\ t = {{\left( {\frac{t}{{{{t}_{R}}}}} \right)}_{d}},\,\,\,\,g = {{\left( {\frac{g}{{{{g}_{o}}}}} \right)}_{d}},\,\,\,\,{\mathbf{a}} = {{\left( {\frac{{\mathbf{a}}}{{{{g}_{o}}}}} \right)}_{d}}, \hfill \\ P = {{\left( {\frac{P}{{m{{g}_{o}}}}} \right)}_{d}},\,\,\,\,X = {{\left( {\frac{X}{{m{{g}_{o}}}}} \right)}_{d}},\,\,\,\,{{W}_{P}} = {{\left( {\frac{{{{W}_{P}}}}{{m{{g}_{o}}{{V}_{R}}}}} \right)}_{d}}, \hfill \\ \end{gathered} \right\}$Компоненты возмущающего ускорения создаются тягой ВЭРД P и аэродинамическим сопротивлением X:
(4)
$\left. \begin{gathered} {{a}_{t}} = \frac{{P(\alpha ){\kern 1pt} {\text{cos}}{\kern 1pt} \alpha - X(\alpha )}}{m}, \hfill \\ {{a}_{s}} = - \frac{{P(\alpha ){\kern 1pt} {\text{sin}}{\kern 1pt} \alpha }}{m}, \hfill \\ \end{gathered} \right\}$Вектор тяги
(5)
${\mathbf{P}} = P{{{\mathbf{e}}}_{P}} = {{\left( {\zeta \frac{{{{\mu }_{{out}}}(\alpha )c}}{{m{{g}_{o}}}}} \right)}_{d}}{{{\mathbf{e}}}_{P}},$Потребляемая ВЭРД мощность WP определяется по формуле ${{W}_{P}} = {{{{\mu }_{{out}}}{{c}^{2}}} \mathord{\left/ {\vphantom {{{{\mu }_{{out}}}{{c}^{2}}} {2{{\eta }_{T}}}}} \right. \kern-0em} {2{{\eta }_{T}}}}.$
Вектор силы сопротивления
(6)
${\mathbf{X}} = - X{{{\mathbf{e}}}_{V}} = - {{\left( {\frac{{0.5\rho (h){{A}_{{SC}}}{{{(V{{V}_{R}})}}^{2}}{{c}_{{xa}}}(\alpha )}}{{m{{g}_{o}}}}} \right)}_{d}}{{{\mathbf{e}}}_{V}},$Для создания тяги необходимо, чтобы концентрация газа в ИК nIC(α) была не меньше минимально допустимой nmin, при которой возможна его ионизация:
где n(h) – концентрация газа в атмосфере; kc – коэффициент компрессии газа в ИК, определяющий, во сколько раз увеличивается концентрация газа в ИК по сравнению с концентрацией во входном потоке.Отсюда следует, что $\xi \equiv 0$ при nIC < nmin.
На угол атаки КА наложено ограничение
где αmax – максимально допустимый угол атаки.Ограничение (8) угла атаки КА с ВЭРД в первую очередь обусловлено снижением эффективности поступления атмосферных газов в ВЗ, что показано далее.
В качестве компонент вектора управления u приняты угол атаки α и параметр включения двигателя ζ:
(9)
$\begin{gathered} {\mathbf{u}} \equiv {{\left\{ {\alpha ,\zeta } \right\}}^{T}},\,\,\,\,{\mathbf{u}} \subset {\mathbf{U}}, \\ {\mathbf{U}} = \left\{ {\left| \alpha \right| \leqslant {{\alpha }_{{{\text{max}}}}},{{n}_{{IC}}}(\alpha ) \geqslant {{n}_{{{\text{min}}}}},\zeta = \left\{ {0,1} \right\}} \right\}. \\ \end{gathered} $Реализация заданных углов атаки может обеспечиваться известными средствами стабилизации и управления движением КА вокруг центра масс, достоинства и недостатки использования которых для управления вектором тяги рассматривались в исследовании [23]. Отметим, что возрастание аэродинамических моментов на УНОО относительно возмущающих моментов других типов увеличивает влияние аэродинамической компоновки КА и возможности использования специальных аэродинамических поверхностей (например, [24]).
В начальный момент времени ti = 0,
(10)
$\begin{gathered} \vartheta ({{t}_{i}}) = {{\vartheta }_{i}} = 0,\,\,\,\,{{h}_{\pi }}({{t}_{i}}) = {{h}_{{\pi i}}}, \\ {{h}_{\alpha }}({{t}_{i}}) = {{h}_{{\alpha i}}},\,\,\,\,E({{t}_{i}}) = {{E}_{i}} = 0. \\ \end{gathered} $В силу сделанных допущений достаточно рассмотреть движение КА с ВЭРД на одном витке орбиты $\vartheta \in [0,\;2\pi ].$ В конечный момент времени tf:
(11)
$\vartheta ({{t}_{f}}) = {{\vartheta }_{f}} = 2\pi ,\,\,\,\,{{h}_{\pi }}({{t}_{f}}) = {{h}_{{\pi f}}} = {{h}_{{\pi i}}}.$Функционал задачи – максимум изменения высоты апогея за виток орбиты при условии равенства начальной hπi и конечной hπf высоты перигея:
(12)
$\Phi = {{\left. {\Delta {{h}_{{\alpha f}}}} \right|}_{{{{h}_{{\pi f}}} = {{h}_{{\pi i}}}}}} \Rightarrow \mathop {{\text{max}}}\limits_{{\mathbf{u}} \in U} ,$где Δhαf = hαf – hαi, hαf = hα(tf).
Модель аэродинамического сопротивления
Аэродинамическое сопротивление – одно из основных слагаемых возмущающего воздействия на движение КА на высотах менее 300 км. Оценка аэродинамического сопротивления КА зависит от принятой модели взаимодействия молекул с поверхностью, температуры и молекулярного состава атмосферы, температуры и шероховатости материала поверхности и т.д. Обзор различных моделей взаимодействия молекул с поверхностью и сравнение полученных с их использованием коэффициентов аэродинамических сил приведены в публикациях [24–27]. Наиболее простой представляется максвелловская модель взаимодействия, в которой используется единственный коэффициент σ, определяющий долю молекул, испытывающих диффузное отражение от поверхности [28]. Результаты анализа движения аппаратов на высотах менее 300 км показывают, что наиболее точное описание аэродинамических сил может быть получено в предположении практически полностью диффузного отражения молекул (σ ≈ 1) [29–32]. Доминирование диффузного отражения означает возрастание роли поверхностей КА, параллельных потоку, в аэродинамическом сопротивлении.
При оптимизации управления углом атаки КА на основе принципа максимума Понтрягина использование аэродинамического сопротивления КА в форме представленных в работах [24–32] моделей приведет к существенному усложнению математической и численной процедуры решения краевой задачи, к которой сводится оптимизационная. В связи с этим для регуляризации исследований в настоящей работе предложена модель аэродинамического сопротивления КА, позволяющая без существенной потери точности использовать простые аналитические зависимости аэродинамического сопротивления от характеристик атмосферы и угла атаки КА.
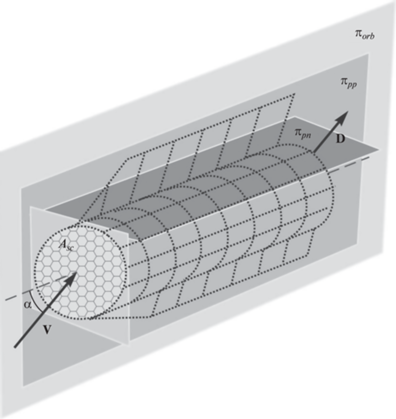
Для наглядности формирования модели аэродинамического сопротивления определим проекции сечений КА плоскостями, параллельными и перпендикулярными продольной оси КА и плоскости орбиты πorb (рис. 1): ASC – площадь и обозначение поперечного сечения КА, Apn – площадь и обозначение проекции сечений КА на плоскость πpn, параллельную продольной оси КА и перпендикулярную πorb, App – площадь и обозначение проекции сечений КА на плоскость πpp, параллельную продольной оси КА и πorb. Тогда, предполагая, что движение КА происходит без скольжения (плоскость симметрии КА проходит через вектор скорости) и, принимая ASC в качестве характерной площади, коэффициент аэродинамического сопротивления КА с учетом исследований [28, 33] представим в виде
где cxa_n – коэффициент аэродинамического сопротивления, ${{c}_{{xa\_n}}} = {{c}_{{{{x}_{0}}}}}{\text{cos}}\alpha ,$ характеризующегося проекцией ASC, ${{c}_{{{{x}_{0}}}}}$ – коэффициент аэродинамического сопротивления КА при нулевом угле атаки; cxa_par – коэффициент аэродинамического сопротивления, ${{c}_{{xa\_par}}} = {{c}_{{xa\_pn}}} + {{c}_{{x\_pp}}},$ характеризующегося проекциями Apn и App соответственно: ${{c}_{{xa\_pn}}} = {{k}_{{pn}}}{{c}_{{{{x}_{0}}}}}\left| {{\text{sin}}\alpha } \right|,$ ${{k}_{{pn}}} = {{{{A}_{{pn}}}} \mathord{\left/ {\vphantom {{{{A}_{{pn}}}} {{{A}_{{SC}}}}}} \right. \kern-0em} {{{A}_{{SC}}}}}{\kern 1pt} ,$ ${{c}_{{x\_pp}}} = {{k}_{{pp}}}{{c}_{{{{x}_{{//}}}}}},$ ${{k}_{{pp}}} = {{{{A}_{{pp}}}} \mathord{\left/ {\vphantom {{{{A}_{{pp}}}} {{{A}_{{SC}}}}}} \right. \kern-0em} {{{A}_{{SC}}}}}{\kern 1pt} ,$ ${{c}_{{{{x}_{{//}}}}}} = {1 \mathord{\left/ {\vphantom {1 {\left( {\sqrt \pi {{S}_{\infty }}} \right)}}} \right. \kern-0em} {\left( {\sqrt \pi {{S}_{\infty }}} \right)}}$ – коэффициент аэродинамического сопротивления пластины при нулевом угле атаки; S∞ – скоростное соотношение, равное отношению скорости набегающего потока V к тепловой скорости молекул в ИК.Рис. 1.
Схема расположения плоскостей, на которые проецируются поверхности КА при создании модели аэродинамических сил, по отношению к продольной оси КА и плоскости орбиты πorb.
Из приведенных соотношений видно, что cxa_pn = 0 при α = 0, что не соответствует режиму диффузного отражения молекул. Для учета вклада проекций Apn в сопротивление при α = 0 предложена аппроксимация $\left| {{\text{sin}}\alpha } \right|:$
(14)
$\tilde {f}(\alpha ) \approx {{c}_{{{{x}_{{//}}}}}}\sqrt {1 + {{{\left( {{{{\text{sin}}\alpha } \mathord{\left/ {\vphantom {{{\text{sin}}\alpha } {{{c}_{{{{x}_{{//}}}}}}}}} \right. \kern-0em} {{{c}_{{{{x}_{{//}}}}}}}}} \right)}}^{2}}} .$Как следует из выражения (14), $\tilde {f}(0) = {{c}_{{{{x}_{{//}}}}}},$ а при α > 0 функция $\tilde {f}(\alpha )$ позволяет аппроксимировать $\left| {{\text{sin}}\alpha } \right|$ с достаточной точностью (рис. 2). В результате получаем модель аэродинамического сопротивления КА (6) с коэффициентом cxa(α) в виде
(15)
$\begin{gathered} {{c}_{{xa}}}(\alpha ) = \\ = {{c}_{{{{x}_{0}}}}}\left( {{\text{cos}}\,\alpha + {{k}_{{pn}}}{{c}_{{{{x}_{{//}}}}}}\sqrt {1 + {{{\left( {{{{\text{sin}}\,\alpha } \mathord{\left/ {\vphantom {{{\text{sin}}\,\alpha } {{{c}_{{{{x}_{{//}}}}}}}}} \right. \kern-0em} {{{c}_{{{{x}_{{//}}}}}}}}} \right)}}^{2}}} } \right) + {{k}_{{pp}}}{{c}_{{{{x}_{{//}}}}}}. \\ \end{gathered} $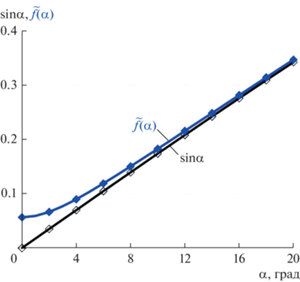
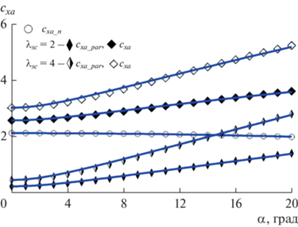
Для верификации сформированной модели (15) проведено ее сравнение с аэродинамическим сопротивлением, рассчитываемым по широко используемой при исследованиях движения в верхних слоях атмосферы модели “Diffuse Reflection with Incomplete Accommodation” (DRIA) [27, 29, 31]. Результаты сравнения с моделью DRIA для полностью диффузного отражения на рис. 3, рассчитанные для двух значений удлинения КА λSC = 2 и 4 при kpn = kpp, подтверждают возможность применения модели (15) для описания аэродинамического сопротивления аппаратов в свободномолекулярном потоке.
Модель тяги ВЭРД
Влияние угла атаки на величину тяги ВЭРД определяется уменьшением [18–20]:
1) эффективной площади входа в ВЗ Aincosα,
2) относительного числа молекул, пролетающих через ВЗ без столкновения с его стенками при наличии угла атаки km(α).
Тогда общий коэффициент, характеризующий уменьшение эффективности ВЗ, а, следовательно, и концентрации молекул в ИК и пропорциональной ей тяги (5), равен:
В работе [19] представлены рассчитанные методом Монте-Карло и полученные экспериментально значения km(α) для цилиндрического ВЗ из нержавеющей стали удлинением λin = 9.4, которые практически совпали.
В работе [20] приведены рассчитанные методом Монте-Карло зависимости km(α) для цилиндрических ВЗ удлинением λin = 5, 10, 15 (рис. 4). Для использования в условиях оптимальности там же представлена аппроксимация ${{\tilde {k}}_{m}}(\alpha )$ зависимости km(α) для цилиндрического ВЗ с λin = 5 степенным многочленом с коэффициентами, полученными методом наименьших квадратов:

Модель атмосферы
Используется модель атмосферы ISO/FDIS 14222 (Space environment (natural and artificial) – Earth upper atmosphere. ISO/FDIS 14222, ISO 2013) для средней солнечной активности. Для использования в расчетах построены аппроксимации зависимости плотности и концентрации атмосферы от высоты полиномами 4-й степени.
РЕШЕНИЕ ОПТИМИЗАЦИОННОЙ ЗАДАЧИ
Условия оптимальности
Решение задачи (12) основано на применении принципа максимума Понтрягина [14].
В силу малости возмущающего ускорения по сравнению с гравитационным $\left| {\mathbf{a}} \right| \ll \left| {\mathbf{g}} \right|,$ фокальный параметр p и эксцентриситет e орбиты в правых частях системы уравнений (2) будем считать постоянными на протяжении одного витка орбиты:
Гамильтониан H системы (2) с учетом ограничений (7), (8):
(18)
$\begin{gathered} H = {{\psi }_{\pi }}{{{\dot {r}}}_{\pi }} + {{\psi }_{\alpha }}{{{\dot {r}}}_{\alpha }} + {{\psi }_{{\text{E}}}}\dot {E} + \\ + \,\,{{\psi }_{\vartheta }}\dot {\vartheta } + {{\lambda }_{n}}({{n}_{{\min }}} - {{n}_{{IC}}}) + {{\lambda }_{\alpha }}\left( {\left| \alpha \right| - {{\alpha }_{{\max }}}} \right), \\ \end{gathered} $(19)
$ \cdot {{\psi }^{T}} = - \frac{{\partial H}}{{\partial z}},\,\,\,\,{\mathbf{z}} = {{({{r}_{\pi }},{{r}_{\alpha }},E,\vartheta )}^{T}}.$Из уравнений (19) и условия трансверсальности ${{\left. {\left[ { - \delta {{r}_{\alpha }} - H\delta t + (\psi ,\;\delta z)} \right]} \right|}_{{t = {{t}_{f}}}}} = 0$ следует:
(20)
${{\psi }_{\alpha }} = {\text{const}} = 1,\,\,\,\,\,{{\psi }_{{\text{E}}}} = {\text{const}} = 0.$В соответствии с условиями оптимальности [14]
(21)
${{{\mathbf{u}}}_{{opt}}} = {\text{arg}}\mathop {{\text{max}}}\limits_{{\mathbf{u}} \in {\mathbf{U}}} H,$(22)
$\begin{gathered} \Delta H(\alpha ,\zeta ) = {{\psi }_{\pi }}{{{\dot {r}}}_{\pi }} + {{\psi }_{\alpha }}{{{\dot {r}}}_{\alpha }} + \\ + \,\,{{\lambda }_{n}}({{n}_{{\min }}} - {{n}_{{IC}}}) + {{\lambda }_{\alpha }}\left( {\left| \alpha \right| - {{\alpha }_{{\max }}}} \right), \\ \end{gathered} $Таблица 1.
Варианты вычислений ΔH(α, ζ)
| $\Delta {{H}_{{opt\,H}}} = \Delta H\left( {{{\alpha }_{{opt}}} = {{\alpha }_{{opt\,H}}}:\left\{ {\frac{{\partial \Delta H}}{{\partial \alpha }} = 0,\;\frac{{{{\partial }^{2}}\Delta H}}{{\partial {{\alpha }^{2}}}} < 0} \right\},\;\zeta = 1} \right)$ |
| $\Delta {{H}_{{11}}} = \Delta H({{\alpha }_{{opt}}} = \pm {{\alpha }_{{\max }}},\;\zeta = 1)$ |
| $\Delta {{H}_{{10}}} = \Delta H({{\alpha }_{{opt}}} = \pm {{\alpha }_{{\max }}},\;\zeta = 0)$ |
| $\Delta {{H}_{{00}}} = \Delta H\left( {{{\alpha }_{{opt}}} = 0:\left\{ {\frac{{\partial \Delta H}}{{\partial \alpha }} = 0,\;\frac{{{{\partial }^{2}}\Delta H}}{{\partial {{\alpha }^{2}}}} < 0} \right\},\;\zeta = 0} \right)$ |
| $\Delta {{H}_{{{{n}_{1}}}}} = \Delta H\left( {{{\alpha }_{{opt}}} = {{\alpha }_{{opt\,n}}}:{{n}_{{IC}}}({{\alpha }_{{opt\,n}}}) = {{n}_{{\min }}},\;\zeta = 1} \right)$ |
В табл. 1 αoptH вычисляется с помощью рекуррентной формулы:
(23)
$\alpha _{{opt\,H}}^{{k + 1}} = \frac{{\partial \Delta {{H}_{{opt\,H}}}}}{{\partial \alpha }}\left( {\alpha _{{opt\,H}}^{k}} \right) + \alpha _{{opt\,H}}^{k},\,\,\,\,k = 0,1, \ldots ,$(24)
$\left. \begin{gathered} \Delta {{H}_{{opt\,H}}} = \hfill \\ = \,\,{{{\tilde {k}}}_{m}}(\alpha )\cos {\kern 1pt} \alpha (A{\kern 1pt} \cos {\kern 1pt} \alpha + F{\kern 1pt} \sin {\kern 1pt} \alpha ) + B{\kern 1pt} \cos {\kern 1pt} \alpha + C, \hfill \\ A = 2{{\eta }_{C}}{{a}_{\vartheta }}c,\;\,\,B = - {{a}_{\vartheta }}{{c}_{{x0}}}V, \hfill \\ C = {{C}_{0}}{{c}_{{{{x}_{0}}}}}\sqrt {1 + {{{\left( {\frac{{{\text{sin}}\alpha }}{{{{c}_{{{{x}_{0}}}}}}}} \right)}}^{2}}} ,\;\,{{C}_{0}} = - {{k}_{{pn}}}{{a}_{\vartheta }}{{c}_{{x0}}}V, \hfill \\ F = {{\eta }_{C}}{{b}_{\vartheta }}c,\;\,\,{{a}_{\vartheta }} = \frac{{1 + {\text{cos}}{\kern 1pt} \vartheta }}{{{{{(1 - e)}}^{2}}}} + {{\psi }_{\pi }}\frac{{1 - {\text{cos}}{\kern 1pt} \vartheta }}{{{{{(1 + e)}}^{2}}}}, \hfill \\ {{b}_{\vartheta }} = \frac{{{\text{sin}}{\kern 1pt} \vartheta }}{{1 + e{\kern 1pt} {\text{cos}}{\kern 1pt} \vartheta }}(1 - {{\psi }_{\pi }}). \hfill \\ \end{gathered} \right\}$Начальное приближение $\alpha _{{opt\,H}}^{0} = $ $ = {{(F + {{C}_{0}})} \mathord{\left/ {\vphantom {{(F + {{C}_{0}})} {\left( {4A(1 - {{k}_{1}}) + B} \right)}}} \right. \kern-0em} {\left( {4A(1 - {{k}_{1}}) + B} \right)}}$ в выражении (23) определяется из решения уравнения
(25)
$\frac{{\partial \Delta {{H}_{{appr}}}}}{{\partial \alpha }}\left( {\alpha _{{opt\,H}}^{0}} \right) = 0,$Для обеспечения требуемой точности численного интегрирования моменты, соответствующие угловым точкам в правых частях систем уравнений (2) и (19), определяются с достаточной точностью из решения в общем случае нелинейных уравнений методом хорд. Появление угловых точек связано с выходом на ограничения (7), (8) и сходом с них и сменой режимов полета в соответствии с условиями оптимальности (21) и табл. 1. Соответствующие невязки ε указаны в табл. 2.
Таблица 2.
Невязки для отслеживания угловых точек методом хорд
| Причина возникновения угловой точки | Невязка |
|---|---|
| Выход на ограничение (7) при ϑ < π и сход с него при ϑ > π | $\varepsilon = \left| {1 - \frac{{{{n}_{{IC}}}({{\alpha }_{{opt\,H}}})}}{{{{n}_{{\min }}}}}} \right|$ |
| Сход с ограничения (7) при ϑ < π и выход на него при ϑ > π: | |
| • при $\Delta H({{\alpha }_{{\max }}},\;0) > \Delta H({{\alpha }_{{opt\,n}}},\;1)$ | $\varepsilon = \left| {\Delta H({{\alpha }_{{\max }}},\;0) - \Delta H({{\alpha }_{{opt\,n}}},\;1)} \right|$ |
| • при $\Delta H({{\alpha }_{{\max }}},\;0) \leqslant \Delta H({{\alpha }_{{opt\,n}}},\;1)$ | $\varepsilon = \left| {1 - \frac{{{{n}_{{IC}}}(\alpha = 0)}}{{{{n}_{{\min }}}}}} \right|$ |
| Смена режимов полета между $({{\alpha }_{{opt\,H}}},\;\zeta = 1)$ и $\left( {{{\alpha }_{{\max }}},\;\zeta = 0} \right)$ | $\varepsilon = \left| {\Delta H({{\alpha }_{{\max }}},\;0) - \Delta H({{\alpha }_{{opt\,H}}},\;1)} \right|$ |
| Смена режимов полета между $\left( {\alpha = 0,\;\zeta = 0} \right)$ и $\left( {{{\alpha }_{{\max }}},\;\zeta = 0} \right)$ | $\varepsilon = \left| {\Delta H({{\alpha }_{{\max }}},\;0) - \Delta H(\alpha = 0,\;0)} \right|$ |
При активном ограничении (7) угол атаки αopt n определяется из решения нелинейного уравнения nIC(α) = nmin методом хорд с невязкой $\varepsilon = \left| {{{k}_{p}}(\alpha ) - \frac{{{{n}_{{{\text{min}}}}}}}{{n(h)k{}_{c}}}} \right|.$
Решение краевой задачи
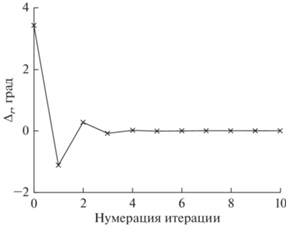
Использование принципа максимума Понтрягина позволяет свести исходную задачу поиска оптимального управления в функциональном пространстве к решению краевой задачи для систем обыкновенных дифференциальных уравнений (2), (19). Для решения двухточечной краевой задачи применяются модифицированный метод Ньютона и метод гомотопии. При сделанных допущениях и с учетом равенств (20) варьируемым параметром выступает сопряженная переменная ψn = const, а соответствующая невязка Δπ следует из условия (11): Δπ = hπf – hπi. Для определения оптимального управления в каждой точке траектории вычисляется оптимальный угол атаки αopt в соответствии с условиями оптимальности (21) и табл. 1. На рис. 5 показано изменение невязки ${{\Delta }_{r}} = \alpha _{{opt\,H}}^{{k + 1}} - \alpha _{{opt\,H}}^{k},$ k = 0, 1, …, по итерациям при применении рекуррентной формулы (23) для вычисления αopt = αopt H = –9.40487 град, полученного при Δr ≤ 10–4 град.
Рис. 5.
Пример изменения невязки Δr по итерациям процедуры поиска оптимального угла атаки по рекуррентной формуле (23).
ЧИСЛЕННЫЕ РЕЗУЛЬТАТЫ
На основании разработанной методики проведены численные исследования для параметров ВЭРД, КА и орбит, приведенных в табл. 3.
Таблица 3.
Параметры ВЭРД, КА и орбит
| Параметр | Значения |
|---|---|
| Начальная высота перигея hπi, км | [140, 180] |
| Начальная высота апогея hαi, км | [160, 1000] |
| Площадь поперечного сечения КА ASC, м2 | 0.1 |
| Удлинение КА λSC | [2, 8] |
| Тяговый к.п.д. ВЭРД ηT | 0.8 |
| Эффективность забора газа ηc | 0.333 |
| Коэффициент компрессии газа в ИК kс | 145 |
| Скорость истечения реактивной струи с, км/с | [80, 140] |
| Коэффициент аэродинамического сопротивления КА при нулевом угле атаки ${{c}_{{{{x}_{0}}}}}$ | 2.2 |
| Минимально допустимая концентрация молекул газа в ИК nmin, м–3 | 1018 |
| Скоростное соотношение частиц в набегающем потоке S∞ | 10 |
| Максимально допустимый угол атаки $\left| {{{\alpha }_{{{\text{max}}}}}} \right|,$ град | 20 |
Сделаны следующие допущения:
1. КА движется по солнечно-синхронной орбите (ССО) в плоскости терминатора.
2. Площадь входного отверстия ВЗ при α = 0 равна площади поперечного сечения КА Ain = ASC.
3. Apn = App.
4. Ограничение на угловую скорость разворота КА относительно центра масс отсутствует.
Оптимальные программы изменения угла атаки КА и тяги ВЭРД на орбитах с начальной высотой перигея hπi = 160 км в зависимости от начальной высоты апогея hαi и истинной аномалии ϑ приведены на рис. 6, 7. На рис. 6 участки оптимальной программы управления углом атаки при работе ВЭРД с минимально допустимой концентрацией газов в ИК (на границе ограничения (7)) показаны пунктирными линиями. На круговой орбите (начальная высота орбиты horb i = 160 км) концентрация газов в ИК не снижается до минимально допустимой, и участок, соответствующий движению по границе ограничения (7), отсутствует. Функция ΔH10 (табл. 1) — четная, т.е. ΔH(αopt = αmax, ζ = 0) = ΔH(αopt = –αmax, ζ = 0) в соответствии с выражениями (2), (4)–(6), (15), (18), (20), (22). Поэтому выбор αopt = αmax при ϑ ≤ π и αopt = –αmax при ϑ > π на рис. 6а обусловлен минимизацией скачкообразного изменения угла атаки в более плотных слоях атмосферы. В этом случае максимальное изменение угла атаки (переключение с αopt = αmax на αopt = –αmax) происходит в апогее орбиты. В то же время на круговых и слабо эллиптических орбитах это обстоятельство несущественно. С точки зрения минимизации количества резких изменений αopt возможные варианты зависимостей αopt(ϑ) для исходных круговой орбиты с horb i = 160 км и орбиты с hπi = 160 км и hαi = 200 км показаны на рис. 6б: с реализацией αopt = –αmax (сплошные линии) и αopt = αmax (пунктирные линии) на участках движения по границе ограничения на угол атаки (8).
Рис. 6.
Оптимальные программы изменения αopt на орбитах с начальными hπi = 160 км и ${{h}_{{\alpha \,i}}} \in [160,\;1000]\;{\text{км}}$ в зависимости от истинной аномалии ϑ; штриховыми линиями показаны участки, соответствующие граничной концентрации nIC = nmin (а); варианты αopt(ϑ) при реализации αopt = –αmax (сплошные линии) и αopt = αmax (штрихпунктирные линии) на участках движения по границе ограничения (8) (б).
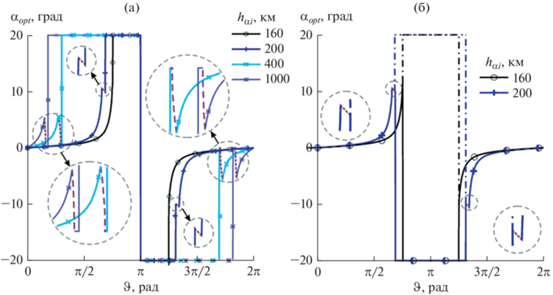
Рис. 7.
Оптимальные программы тяги ВЭРД Popt на орбитах с начальными hπi = 160 км и ${{h}_{{\alpha \,i}}} \in [160,\;1000]\;{\text{км}}$ в зависимости от истинной аномалии ϑ; пунктирными линиями выделены участки, соответствующие граничной концентрации nIC = nmin, штриховыми линиями – участки, соответствующие $\left| {{{\alpha }_{{opt}}}} \right| = {{\alpha }_{{\max }}},$ штрихпунктирными линиями – участки с нулевой тягой.

На рис. 7 пунктирными линиями показаны участки работы ВЭРД при минимально допустимой концентрации в ИК (на границе ограничения (7)), штрихпунктирные линии соответствуют участкам пассивного полета КА (с нулевой тягой). Отключается (ζ = 0) и включается (ζ = 1) тяга в соответствии с условиями оптимальности (21). На круговой орбите, где концентрация газов в ИК не снижается до минимальной, штриховой линией указана тяга, реализующаяся при максимальном угле атаки.
На рис. 8 в зависимости от истинной аномалии ϑ показано оптимальное изменение высоты перигея Δhπ (пунктирные линии) и апогея Δhα (сплошные линии) оскулирующих орбит при полете КА с ВЭРД с оптимальным управлением углом атаки и тягой (рис. 6, 7). Как следует из рис. 8, максимум изменения высоты апогея при оптимальном управлении достигается на круговой орбите horb i = 160 км. Но и затраты энергии для работы ВЭРД на круговой орбите также максимальны (рис. 9). Поэтому в условиях ограниченной энергетики благодаря возможности накопления энергии на высотах, где аэродинамическое сопротивление КА практически отсутствует, использование эллиптических орбит для обеспечения длительного существования КА с ВЭРД может оказаться предпочтительнее круговых.
Рис. 8.
Изменение высот апогея Δhα (сплошные линии) и перигея Δhπ (штриховые линии) оскулирующих орбит при оптимальном управлении КА в зависимости от истинной аномалии ϑ с начальными hπi = 160 км, ${{h}_{{\alpha \,i}}} \in [160,\;1000]\;{\text{км}}{\text{.}}$

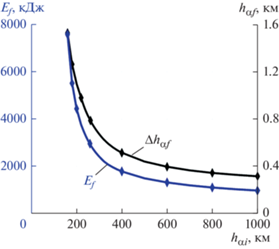
Рис. 9.
Максимально возможное увеличение высоты апогея Δhαf и потребляемая ВЭРД энергия Ef за один виток орбиты с начальной высотой перигея hπi = 160 км в зависимости от начальной высоты апогея hαi.
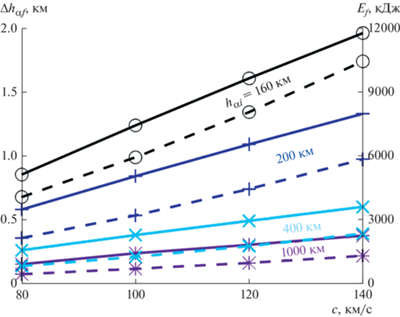
Результаты численных исследований на рис. 6–9 получены для КА удлинением λSC = 4 с ВЭРД со скоростью истечения с = 100 км/с. Результаты исследования влияния этих параметров представлены на рис. 10, 11. Показаны относительные изменения высоты апогея Δhαf (сплошные линии) и потребляемая ВЭРД энергия Ef (штриховые линии) за один виток орбитального полета с начальной высотой перигея hπi = 160 км в зависимости от начальной высоты апогея hαi, ${{\lambda }_{{SC}}} \in [2,\;8]$ (рис. 10) и скорости истечения $c \in [80,\;140]\;{{{\text{км}}} \mathord{\left/ {\vphantom {{{\text{км}}} {\text{с}}}} \right. \kern-0em} {\text{с}}}$ (рис. 11). Из рисунков следует, что влияние рассматриваемых параметров (λSC и с) снижается при увеличении эллиптичности орбит с начальными высотами перигея и апогея в рассматриваемом диапазоне.
Рис. 10.
Максимальное изменение высоты апогея Δhαf (сплошные линии) и потребляемая ВЭРД энергия Ef (штриховые линии) за один виток орбиты с начальной высотой перигея hπi = 160 км в зависимости от начальной высоты апогея hαi и удлинения КА λSC при с = 100 км/с.
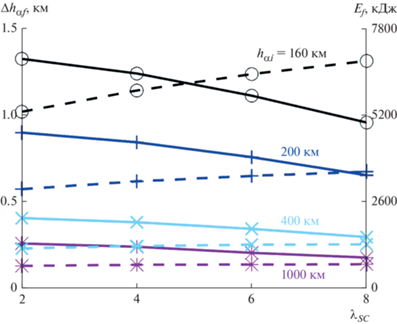
Рис. 11.
Максимальное изменение высоты апогея Δhαf (сплошные линии) и потребляемая ВЭРД энергия Ef (штриховые линии) за один виток орбиты с начальной высотой перигея hπi = 160 км в зависимости от начальной высоты апогея hαi и скорости истечения с при λSC = 4.
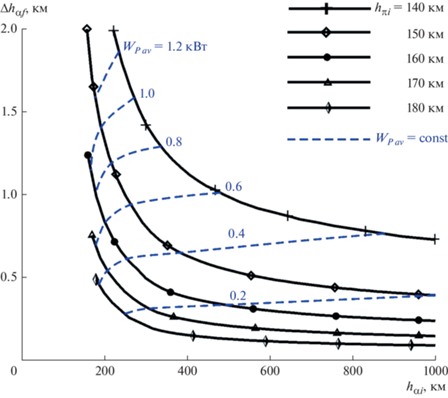
На рис. 12 приведены оптимальные изменения высоты апогея за один виток орбиты Δhαf в зависимости от начальной высоты перигея ${{h}_{{\pi \,i}}} \in \left[ {140,\;180} \right]\;{\text{км}}$ и апогея ${{h}_{{\alpha \,i}}} \in \left[ {140,\;1000} \right]\;{\text{км}}$ при постоянной скорости истечения с = 100 км/с и λSC = = 4. На рис. 12 также показаны линии уровня усредненной мощности ${{W}_{{P\;av}}} = {{{{E}_{f}}} \mathord{\left/ {\vphantom {{{{E}_{f}}} {{{T}_{{orb}}}}}} \right. \kern-0em} {{{T}_{{orb}}}}}$ за период обращения Torb. Приведенные результаты исследований еще раз подтверждают, что для обеспечения длительного активного существования КА с ВЭРД использование эллиптических орбит с ультранизким перигеем может быть предпочтительнее за счет возможности накопления энергии на высотах, где аэродинамическое сопротивление КА пренебрежимо мало.
ЗАКЛЮЧЕНИЕ
На основе применения принципа максимума Понтрягина для системы уравнений в оскулирующих переменных решена задача оптимизации управления вектором тяги ВЭРД для наискорейшего изменения высоты апогея орбиты КА с учетом зависимости тяги от угла атаки и концентрации газа в ионизационной камере.
Получены оценки эффективности разработанных оптимальных программ управления углом атаки и тягой ВЭРД в зависимости от начальных высот перигея и апогея, скорости истечения, параметров компоновки КА.
Показано, что использование эллиптических орбит в условиях ограниченной энергетики может быть предпочтительнее благодаря возможности накопления энергии на высотах, где аэродинамическое сопротивление КА практически отсутствует.
Работа выполнена при поддержке Российского научного фонда, проект № 20-69-46034, Организация – МГУ имени М.В. Ломоносова.
Список литературы
Гродзовский Г.Л., Иванов Ю.Н., Токарев В.В. Механика космического полета с малой тягой. М.: Наука, 1966.
Маров М.Я., Филатьев А.С. Комплексные исследования электрореактивных двигателей при полетах в ионосфере Земли: К 50-летию Государственной программы “Янтарь” // Косм. исслед. 2018. Т. 56. № 2. С. 137–144. https://doi.org/10.7868/S0023420618020061 (Cosmic Research. 2018. Т. 56. № 2. P. 123–129).10.7868/S0023420618020061
Virgili J., Roberts P.C.E., Palmer K. et al. Very Low Earth Orbit mission concepts for Earth Observation: Benefits and challenges // Proc. 12th Reinventing Space Conf. London, UK. 2014. BIS-RS-2014-37.
Filatyev A.S., Golikov A.A., Nosachev L.V. et al. Spacecraft with air-breathing electric propulsion as the future ultra-speed aircraft // Proc. 71th Intern. Astronautical Congress. The CyberSpace Edition. 1–5 Oct. 2020. IAC-20-C4.6.8.
Dolgich A. Soviet Studies on Low-Thrust Orbital Propellant-Scooping Systems // Foreign Sciebce Bull. 1969. V. 5. № 7. P. 1–9.
Цой Э.П. Выбор оптимальной программы управления тягой накопителя рабочего вещества в нестационарном режиме // Тр. ЦАГИ. 1968. Вып. 1145.
Шумилкин В.Г. Управление тягой орбитального аппарата с двигателем ограниченной мощности при полете с накоплением атмосферного воздуха // Ученые записки ЦАГИ. 1976. Т. 7. № 2. С. 81–87.
Romano F. et al. System Analysis and Test-Bed for an Atmosphere-Breathing Electric Propulsion System Using an Inductive Plasma Thruster // Proc. 68th Intern. Astronautical Congress. Adelaide, Australia, 25–29 Sept. 2017. IAC-17-C4.6.5.
Rock B.St., Blandino J.J., Demetriou M.A. Propulsion Requirements for Drag-Free Operation of Spacecraft in Low Earth Orbit // J. Spacecraft and Rockets. 2006. V. 43. № 3. P. 594–606. https://doi.org/10.2514/1.15819
Marchetti P., Blandino J.J., Demetriou M.A. Electric Propulsion and Controller Design for Drag-Free Spacecraft Operation // J. Spacecraft and Rockets. 2008. V. 45. № 6. P. 1303–1315. https://doi.org/10.2514/1.36307
Becedas J., González G., Domínguez R.M. et al. Aerodynamic Technologies for Earth Observation Missions in Very Low earth Orbit. A: Reinventing Space Conference // Proc. 16th Reinventing Space Conf. (RISpace). London, UK, 30 Oct. – 1 Nov. 2018. P. 1–10.
Filatyev A.S., Erofeev A.I., Yanova O.V. et al. Physical Grounds and Control Optimization of Low-Orbit Spacecraft with Electric Ramjet // Proc. 68th Intern. Astronautical Congress. Adelaide, Australia, 25–29 Sept. 2017. IAC-17-C4.IP.51.
Barral S., Cifali G., Albertoni R. et al. Conceptual Design of an Air-Breathing Electric Propulsion System // Proc. 34th Intern. Electric Propulsion Conf. Kobe, Japan, 4–10 July 2015. IEPC-2015-271.
Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. М.: Наука, 1969.
Filatyev A.S., Yanova O.V. On the optimal use of electric ramjet for low-orbit spacecraft // Procedia Engineering. 2017. V. 185. P. 173–181. https://doi.org/10.1016/j.proeng.2017.03.299
Filatyev A.S., Erofeev A.I., Nikiforov A.P. et al. Comparative evaluation of the applicability of electrical ramjets // Proc. 58th Israel Annual Conf. Aerospace Science. WeL1T4.3. Tel-Aviv, Haifa, Israel, 14–15 Mar. 2018. P. 503–519. http://toc.proceedings.com/ 37020webtoc.pdf.
Filatyev A.S., Yanova O.V. The control optimization of low-orbit spacecraft with electric ramjet // Acta Astronautica. 2019. V. 158. P. 23–31.
Yanova O.V., Filatyev A.S. Synthesis of the optimal control of spacecraft with air-breathing electric propulsion in orbits with ultra-low perigee in view of dependence of the engine efficiency on angle of attack // Proc. 71th Intern. Astronautical Congress. The CyberSpace Edition. 1–5 Oct. 2020. IAC-20-C1.5.1.
Ерофеев А.И., Никифоров А.П., Плугин В.В. Экспериментальные исследования воздухозаборника в свободномолекулярном потоке газа // Ученые записки ЦАГИ. 2017. Т. 48. № 3. С. 56–69.
Ерофеев А.И., Никифоров А.П., Плугин В.В. Моделирование процессов в воздухозаборнике для низкоорбитальных космических аппаратов в вакуумной аэродинамической трубе // Актуальные вопросы проектирования автомат. космич. аппаратов для фундам. и прикладных науч. исслед.: сб. тр. конф. Вып. 2. Химки: Изд-во “НПО им. С.А. Лавочкина”. 2017. С. 365–374.
Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического полета. М.: Наука. Гл. ред. физ.-мат. лит., 1990.
Мирер С.А. Механика космического полета. Орбитальное движение. М.: Резолит, 2007.
Fearn D.G. Ion thruster thrust vectoring requirements and techniques // 27th Intern. Electric Propulsion Conf. Pasadena, CA. 15–19 Oct. 2001. IEPC-01-115.
Munoz V., González D., Becedas J. et al. Attitude control for satellites flying in VLEO using aerodynamic surfaces // J. British Interplanetary Society. 2020. V. 73. № 3. P. 103–112.
Prieto D.M., Graziano B.P., Roberts P.C.E. Spacecraft drag modelling // Progress in Aerospace Sciences. 2014. V. 64. P. 56–65. https://doi.org/10.1016/j.paerosci.2013.09.001
Livadiotti S., Crisp N.H., Robert P.C.E. et al. A review of gas-surface interaction models for orbital aerodynamics applications // Progress in Aerospace Sciences. 2020. V. 119. Art. № 100675. https://doi.org/10.1016/j.paerosci.2020.100675
Mehta P.M., Walker A., McLaughlin C.A., Koller J. Comparing Physical Drag Coefficients Computed Using Different Gas–Surface Interaction Models // J. Spacecraft and Rockets. 2014. V. 51. № 3. P. 873–883. https://doi.org/10.2514/1.A32566
Koppenwallner G. Satellite Aerodynamics and Determination of Thermospheric Density and Wind // AIP Conf. Proc. 2011. V. 1333. P. 1307–1312. https://doi.org/10.1063/1.3562824
Moe K., Moe M.M. Gas-surface interactions and satellite drag coefficients // Planetary and Space Science. 2005. V. 53. P. 793–801. https://doi.org/10.1016/j.pss.2005.03.005
Koppenwallner G. Comment on special section: new perspectives on the satellite drag environments of Earth, Mars, and Venus // J. Spacecraft and Rockets. 2008. V. 45. № 6. P. 1324–1327. https://doi.org/10.2514/1.37539
Sutton E.K. Normalized Force Coefficients for Satellites with Elongated Shapes // J. Spacecraft and Rockets. 2009. V. 46. № 1. P. 112–116. https://doi.org/10.2514/1.40940
Doornbos E. Thermospheric Density and Wind Determination from Satellite Dynamics. Book Ser.: Springer Theses. 2012. https://link.springer.com/book/10.1007/ 978-3-642-25129-0
Golikov A.A., Filatyev A.S. Integrated optimization of trajectories and layout parameters of spacecraft with air-breathing electric propulsion // Acta Astronautica. 2022. V. 193. P. 644–652. https://doi.org/10.1016/j.actaastro.2021.06.052
Дополнительные материалы отсутствуют.
Инструменты
Космические исследования