

Микроэлектроника, 2022, T. 51, № 5, стр. 386-400
Особенности работы трехэлектродного электростатического микрогенератора при наличии соударений между электродами
В. П. Драгунов a, Д. И. Остертак a, *, Р. Е. Синицкий a, Е. В. Драгунова a
a Новосибирский государственный технический университет
630073 Новосибирск, Пр. Карла Маркса, 20, Россия
* E-mail: ostertak@ngs.ru
Поступила в редакцию 19.04.2022
После доработки 06.05.2022
Принята к публикации 12.05.2022
- EDN: TSGDZH
- DOI: 10.31857/S0544126922050040
Аннотация
Представлены результаты исследования влияния ударных взаимодействий на работу трехэлектродного двухконденсаторного микроэлектромеханического преобразователя и микрогенератора на его основе. Проанализирована работа микрогенератора в ударном периодическом режиме для двух крайних случаев, когда подвижный электрод изначально соприкасается с ограничителями, расположенными на левой (ЛСК) или правой (ПСК) стенках корпуса. Получено соотношение между параметрами системы и характеристиками источника внешней вынуждающей силы, позволяющее оценить возможность реализации периодического ударного режима работы. Рассчитаны зависимости средней вырабатываемой мощности ударного микрогенератора от числа соударений и величины нагрузки. Показано, что микрогенератор с трехэлектродным МЭМП в случае, когда подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК, развивает большую мощность, чем в случае, когда подвижный электрод изначально касается ограничителей, расположенных на ПСК. Проведено сравнение эффективности работы микрогенератора в ударном и безударном режимах. Показано, что при использовании ударного режима возможен выигрыш в развиваемой мощности в 2–5 раз при значительном снижении на 1–2 порядка величины оптимального сопротивления нагрузки по сравнению с использованием эквивалентного безударного режима. В целом, проведенный анализ и развиваемый подход, позволяют существенно сузить диапазон поиска необходимых параметров системы на этапе предварительного проектирования и сократить время проектирования.
1. ВВЕДЕНИЕ
Интенсивное развитие микросистемной техники и последние достижения в области нанотехнологий создают предпосылки для создания ряда миниатюрных устройств различного целевого назначения с большим спектром практического применения (сенсорные микросистемы, микромеханические системы различного рода, миниатюрные имплантируемые биостимуляторы и др.).
В настоящее время в качестве источника энергии для автономной малогабаритной техники в основном используют химические (литий-ионные и литий-полимерные) источники. Однако химические источники имеют ограничения по миниатюризации, существенную зависимость основных параметров от температуры, требуют периодической подзарядки, также их удельная энергия не превышает 1 кВт/кг.
За последние 20 лет внимание академических и промышленных сообществ для решения проблемы питания маломощных электронных устройств, таких как интеллектуальные носимые системы, биомеханические имплантаты и узлы беспроводных сенсорных сетей, привлекло извлечение энергии из источников окружающей среды [1, 2]. Электрическая энергия может быть преобразована из энергии солнечного света, ветра, прилива, течения, механических вибраций и других природных ресурсов. Кинетическая энергия человеческого движения, вибраций и шума окружающей среды является одним из наиболее распространенных источников энергии в окружающей среде. Поэтому значительные усилия направлены на разработку высокоэффективных харвестеров энергии для преобразования механической кинетической энергии в электрическую.
Преобразование механической энергии в электрическую может быть достигнуто с помощью электромагнитного [3, 4], пьезоэлектрического [5, 6], электростатического [7, 8] и трибоэлектрического [9, 10] механизмов преобразования. С точки зрения совместимости с интегральной технологией производства микроэлектромеханических систем (МЭМС) наиболее перспективным представляется электростатический принцип преобразования. В основе работы таких электростатических микроэлектромеханических преобразователей (МЭМП) лежит изменение емкости переменного конденсатора под действием внешних механических колебаний (вибраций) [11–13]. Кроме того, использование технологии МЭМС обеспечивает высокую надежность и помехоустойчивость, низкое энергопотребление, и существенный выигрыш по массогабаритным и технико-экономическим параметрам.
Разработка и усовершенствование МЭМП и микрогенераторов на их основе в первую очередь направлены на повышение средней генерируемой мощности, а также на уменьшение их массогабаритных параметров, в связи с чем появляются пространственные ограничения в конструкции устройств так или иначе влияющие на их работу. Обычно для увеличения мощности МЭМП стремятся увеличить глубину модуляции емкости переменного конденсатора η = Cmax/Cmin (здесь Cmax и Cmin – максимальное и минимальное значения емкости переменного конденсатора) и величину заряда ${{q}_{0}}$, забираемого из первичного источника питания. При миниатюризации преобразователя обе эти возможности существенно ограничиваются, так как с уменьшением межэлектродного зазора растет Cmin и вероятность электрического пробоя.
Теоретически мощность МЭМП можно также увеличить, уменьшая длительность цикла преобразования энергии и увеличивая количество циклов преобразования за период внешних механических колебаний, чего можно достигнуть за счет использования дополнительных сил, возникающих в системе при соударении электродов переменного конденсатора.
Такой новый тип МЭМП – ударные преобразователи в настоящее время представляется перспективным [14–17]. В литературе исследовалось влияние ударов на нелинейность, влияющую на характеристики МЭМП [16–19], рассматривалась возможность использовании ударов в МЭМП для увеличения полосы пропускания частот колебаний [15, 20, 21].
Конечно, современные компьютеры позволяют получить решения динамических систем для любого набора значений параметров и начальных условий. Однако при этом из рассмотрения могут выпасть нежелательные (или искомые) и даже потенциально аварийные режимы работы, возможные в исследуемой системе. В этой ситуации важно общее представление об особенностях и возможностях базового аналога изучаемой модели, т.е. о качественной картине еe поведения в зависимости от изменения параметров.
В нашей предыдущей работе мы показали возможность увеличения выходной мощности микрогенератора на основе ударного МЭМП с одним переменным конденсатором [22].
В данной работе проводится моделирование и сравнительный анализ работы электростатических двухконденсаторных микрогенераторов, содержащих трехэлектродный МЭМП ударного и безударного типа.
2. МОДЕЛЬ МЭМП
Прежде чем анализировать работу микрогенератора в целом рассмотрим особенности функционирования важнейшей его части – МЭМП. Как и классический электростатический, ударный преобразователь представляет собой переменный конденсатор. Упрощенная механическая схема трехэлектродной конструкции такого МЭМП представлена на рис. 1. Преобразователь содержит корпус и подвижный электрод. Один из электродов переменного конденсатора располагается на правой стенке корпуса (ПСК), второй – на левой стенке корпуса (ЛСК), третий – подвижный электрод – может свободно перемещаться между левой и правой стенками корпуса. Для исключения залипания подвижного электрода и электродов, расположенных на ПСК и ЛСК, на последних предусмотрены ограничители. При анализе полагали, что максимальная величина зазора между ограничителями и подвижным электродом – d0. Толщина подвижного электрода равна нулю. Высота ограничителей выбиралась пропорциональной зазору d0 и равной md0, где m – коэффициент пропорциональности.
Рис. 1.
Схематическое изображение конструкции трехэлектродного преобразователя энергии (а) и его механическая модель (б), используемая для моделирования.
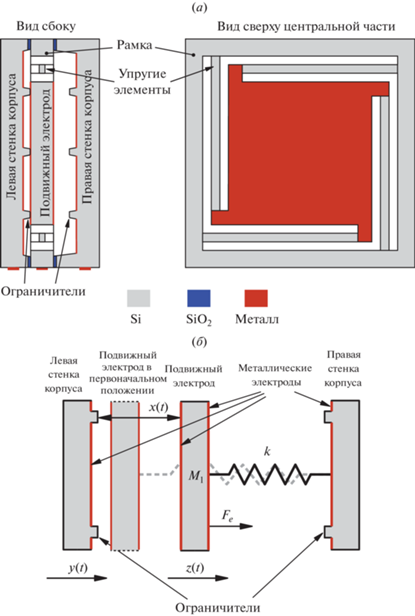
В процессе движения корпуса по закону y(t), определяемому внешней вынуждающей силой (силовое возбуждение), подвижный электрод массой M1, закрепленный на упругом подвесе жесткостью k, вовлекается в колебательный процесс и движется по закону z(t) (кинематическое возбуждение). При этом на подвижный электрод со стороны подвесов действуют силы упругости подвесов, стремящиеся вернуть его в положение равновесия, а также электрические силы притяжения, создаваемые приложенным электрическим полем.
В итоге зазор между ограничителями на ЛСК и подвижным электродом изменяется согласно закону x(t). При этом в линейном приближении для механической силы, уравнение баланса сил может быть представлено в виде:
(1)
${{M}_{1}}\frac{{{{d}^{2}}h}}{{d{{t}^{2}}}} + B\frac{{dh}}{{dt}} + kh - {{F}_{e}} = - {{M}_{1}}\frac{{{{d}^{2}}y}}{{d{{t}^{2}}}},$Уравнение (1) описывает движение подвижного электрода только в интервалы времени между соударениями с ограничителями. Для учета ударного взаимодействия в момент соприкосновения подвижного электрода с ограничителями будем использовать метод деформируемых элементов, в рамках которого в точку контакта мысленно помещается пружинка, обладающая очень большой жесткостью и пренебрежимо малой массой. В этом случае, если учесть, что непосредственно перед ударом деформация пружинки δ(0) = 0, а начальная скорость деформирования пружинки равна скорости сближения электродов $\dot {\delta }(0) = {{v}_{1}}(0) - {{v}_{2}}(0)$, то при линейной зависимости упругой силы от деформации
где $\omega = \sqrt {k{\text{/}}({{M}_{1}} + {{M}_{3}})} $, k – коэффициент жесткости пружины, ${{v}_{1}}$ и ${{v}_{2}}$ – соответственно скорости подвижного электрода и корпуса непосредственно перед соприкосновением электродов. В рамках сделанных допущений продолжительность удара Δt = π/ω, а максимальная ударная сила ${{F}_{{\max }}} = \sqrt {k({{M}_{1}} + {{M}_{3}})} ({{v}_{1}}(0) - {{v}_{2}}(0))$. Если предположить, что при ударе деформируются только отбойники, то М3 – масса ограничителей на стенке корпуса.Оценки показывают, что при четырех кремниевых ограничителях на стенке корпуса высотой 5 мкм и площадью основания 1 мм2 каждый, массе подвижного электрода 1 г продолжительность удара не превысит Δt = 1 мкс. Т.о., если период изменения внешней силы Т (период колебаний корпуса) превышает 1 мс, то временем соударения можно пренебрегать. Тогда в рамках классической теории удара скорости соударяющихся тел после удара будут определяться уравнениями [23, 24]
(2)
$\begin{array}{*{20}{c}} {{{V}_{1}} = {{v}_{1}} + (1 + e)\frac{{{{M}_{2}}}}{{{{M}_{1}} + {{M}_{2}}}}({{v}_{2}} - {{v}_{1}}),} \\ {{{V}_{2}} = {{v}_{2}} + (1 + e)\frac{{{{M}_{1}}}}{{{{M}_{1}} + {{M}_{2}}}}({{v}_{1}} - {{v}_{2}}),} \end{array}$Расчет также показывает, что при высоте ограничителей 5 мкм, площади подвижного электрода 6 см2, амплитуде колебаний корпуса 20 мкм и напряжении V между соударяющимися электродами 20 В, максимальная ударная сила Fmax будет превышать электрическую силу притяжения между электродами Fe более, чем в 1000 раз. В результате при данных параметрах системы и V ≤ 20 В влиянием Fe на параметры движения системы можно пренебречь.
Проанализируем особенности движения подвижного электрода МЭМП при условии отсутствия электрических сил, механического сопротивления и сил упругости подвеса.
Будем полагать, что изначально корпус преобразователя находится в крайнем левом положении и затем начинает периодическое движение вправо. В свою очередь подвижный электрод в начальный момент может располагаться на произвольном расстоянии от неподвижных. Анализ показывает, что в зависимости от первоначального положения подвижного электрода его дальнейшие перемещения будут существенно различаться.
Имеется два наиболее различающихся начальных условий, приводящих к различному поведению подвижного электрода. В первом случае подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК, и начинает движение подталкиваемый ЛСК. Во втором случае подвижный электрод изначально касается ограничителей, расположенных на ПСК.
Рассмотрим первый случай. Будем полагать, что в начальный момент времени t0 = 0 подвижный электрод соприкасался с ограничителями на ЛСК, а сам корпус находился в крайнем левом положении. С началом движения корпуса вправо начнет движение и подвижный электрод, подталкиваемый ЛСК. В случае гармонического закона движения корпуса y(t) = –A0cos(ωt) их совместное движение с одинаковой скоростью будет продолжаться до тех пор пока скорость корпуса не достигнет максимального значения υ2(t1 = T/4) = A0ω (здесь A0 и ω – амплитуда и круговая частота колебаний корпуса). После этого (при t > t1) движение корпуса будет замедляться, а подвижный электрод продолжит движение со скоростью ${{v}_{1}}$(t1) = ${{v}_{2}}$(t1) = A0ω. В момент времени t2 подвижный электрод “догонит” ограничители на ПСК и произойдет их столкновение, после чего корпус продолжит движение со скоростью V2(t) = ${{v}_{2}}$(t) = A0ωsin(ωt), а подвижный электрод – со скоростью V1(t2) = 2${{v}_{2}}$(t2) – ${{v}_{1}}$(t1). В дальнейшем подвижный электрод в момент t3 может снова соприкоснуться с ограничителями на правой или уже на левой стенках корпуса.
Используя систему уравнений (1) и (2) можно рассчитать зависимости величины зазоров h(t) и x(t) между ограничителями на стенках корпуса и подвижным электродом от времени при различных параметрах МЭМП.
Анализ показывает, что в общем случае смещение подвижного электрода относительно корпуса апериодично, т.е. система ведет себя стохастическим образом [22, 25].
Пример рассчитанной траектории смещения подвижного электрода представлен на рис. 2.
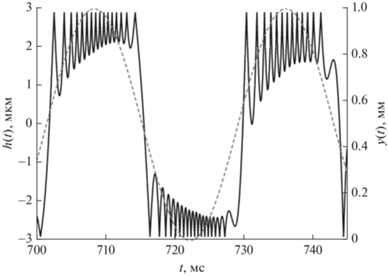
При таком поведении подвижного электрода даже средняя мощность за период колебаний корпуса, развиваемая микрогенератором, может изменяться во времени, что неудобно при использовании микрогенератора. С этой точки зрения представляет интерес поиск решений, при которых движение подвижного электрода будет периодическим.
Чтобы функционирование системы стало периодическим необходимо при составлении системы уравнений, описывающих еe поведение, учесть, что ${{v}_{1}}$(t) и V1(t) должны равняться соответственно ${{v}_{1}}$(t + T) и V1(t + T). При сделанных допущениях в этом случае для определения моментов столкновения подвижного электрода с ограничителями на ПСК при заданном числе столкновений за период колебаний корпуса (ПКК) можно составить соответствующую систему трансцендентных уравнений. Например, для МЭМП с четырьмя соударениями за ПКК, система уравнений, определяющих параметры МЭМП, принимает вид
(3)
$\begin{gathered} \frac{{{{d}_{0}}}}{{{{A}_{0}}}} = \cos (\omega {{t}_{2}}) - \cos (\omega {{t}_{1}}) + \sin (\omega {{t}_{1}})(\omega {{t}_{2}} - \omega {{t}_{1}}), \\ \cos (\omega {{t}_{2}}) - \cos (\omega {{t}_{3}}) = \\ = \,\,[2\sin (\omega {{t}_{2}}) - \sin (\omega {{t}_{1}})](\omega {{t}_{3}} - \omega {{t}_{2}}), \\ 2\sin (\omega {{t}_{3}}) = 2\sin (\omega {{t}_{2}}) - \sin (\omega {{t}_{1}}), \\ \end{gathered} $Из (3) следует, что при сделанных допущениях периодическое поведение будет возможно только при определенном соотношении между амплитудой колебаний корпуса A0 и максимальной величиной зазора между ограничителями на ПСК и подвижным электродом d0.
В общем случае получить аналитические выражения для оценки необходимого значения отношения d0/A0 при заданном числе соударений n за ПКК МЭМП не удается. Однако расчеты показывают, что с погрешностью менее 2% в интервале 1 < n < 20 зависимость отношения d0/A0 от числа соударений подвижного электрода n с ограничителями на ПСК за период хорошо аппроксимируется показательной функцией
Согласно (4) для увеличения числа соударений n за ПКК при неизменной амплитуде колебаний корпуса МЭМП A0 необходимо уменьшать максимальную величину зазора между ограничителями и подвижным электродом d0 или увеличивать A0, если необходимо сохранять d0.
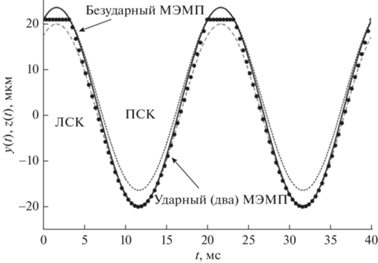
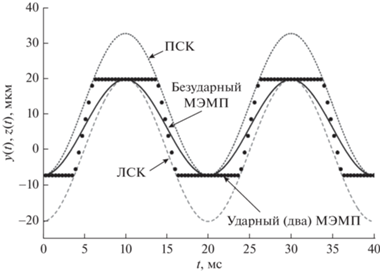
На рис. 3 приведены траектории движения левой и правой стенок корпуса, а также подвижных электродов в ударном (с двумя ударами за ПКК) и соответствующем безударном МЭМП, рассчитанные при A0 = 2 × 10–5 м, T = 0.02 с и ${{d}_{0}} = (2\pi - 3\sqrt 3 ){{A}_{0}}{\text{/}}6$. Для наглядности начало отсчета времени совмещено с моментом первого удара подвижного электрода об ограничители на ПСК.
Рис. 3.
Траектории движения левой (длинный пунктир) и правой (короткий пунктир) стенок корпуса, а также подвижных электродов в ударном (с двумя ударами (точки)) и безударном (сплошная линия) МЭМП.
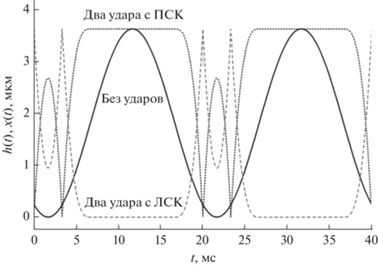
На рис. 4 приведены зависимости изменения зазоров между подвижным электродом и электродами на корпусе, от времени в ударном – с двумя ударами за ПКК и соответствующем безударном МЭМП, рассчитанные при тех же параметрах, что и на рис. 3 и m = 0.25.
Рис. 4.
Зависимости изменения зазоров между подвижным электродом и электродами на ПСК и ЛСК от времени в ударном – с двумя ударами (короткий пунктир – зазор до ПСК, длинный пунктир – до ЛСК) и соответствующем безударном (сплошная линия – зазор до ПСК) МЭМП.
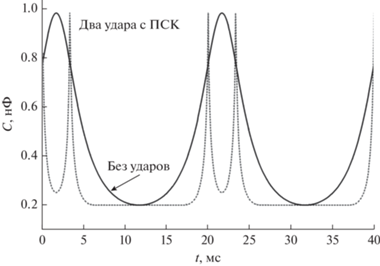
На рис. 5 приведены зависимости изменения емкости между подвижным электродом и электродом на ПСК от времени в ударном – с двумя ударами за ПКК и соответствующем безударном МЭМП, рассчитанные при тех же параметрах, что и на рис. 3, и площадью подвижного электрода S = 6 × 10–4 м2.
Рис. 5.
Зависимости изменения емкости между подвижным электродом и электродом на ПСК от времени в ударном – с двумя ударами (короткий пунктир) и соответствующем безударном (сплошная линия) МЭМП.
Анализ аналогичных зависимостей, рассчитанных для МЭМП с большим числом соударений, показывает, что при неизменной высоте ограничителей максимальная глубина модуляции емкости с увеличением числа соударений уменьшается. Если же одновременно с уменьшением отношения d0/A0 пропорционально уменьшать и высоту ограничителей, то максимальная глубина модуляции емкости у МЭМП остается неизмененной. Однако амплитуда отскоков уменьшается (рис. 6).
Рис. 6.
Зависимость изменения зазора между подвижным электродом и ограничителями на ПСК от времени в ударном (с девятью ударами) МЭМП.

Отметим также, что в рассмотренном случае изменяя отношения d0/A0 можно получить любое значение числа ударов n = 1,2,3,… за период колебаний корпуса.
Рассмотрим второй случай. Будем полагать, что в начальный момент времени t0 = 0 подвижный электрод соприкасался с ограничителями на ПСК, а сам корпус находился (как и в первом случае) в крайнем левом положении. С началом движения корпуса вправо подвижный электрод остается на месте пока ограничитель на ЛСК в момент t1 не коснется его. В случае гармонического закона движения корпуса y(t) = –A0cos(ωt) после первого соударения подвижный электрод начнет двигаться скоростью V1(t1) = 2${{v}_{2}}$(t1) = 2A0ωsin(ωt1), а корпус продолжит движение со скоростью V2(t) = ${{v}_{2}}$(t) = A0ωsin(ωt). В дальнейшем подвижный электрод в момент t2 может снова соприкоснуться с ограничителями на правой или уже на левой стенках корпуса.
Чтобы поведение системы стало периодическим необходимо, как и в первом случае, при составлении системы уравнений, описывающих еe поведение, учесть, что ${{v}_{1}}$(t) и V1(t) должны равняться соответственно ${{v}_{1}}$(t + T) и V1(t + T). В данном случае, например, для МЭМП с четырьмя соударениями за ПКК, система уравнений, определяющих параметры МЭМП, принимает вид
(5)
$\begin{gathered} \frac{{{{d}_{0}}}}{{{{A}_{0}}}} = 1 - \cos (\omega {{t}_{1}}), \\ \frac{{{{d}_{0}}}}{{{{A}_{0}}}} = \cos (\omega {{t}_{2}}) - \cos (\omega {{t}_{1}}) + \\ + \,\,2{\kern 1pt} \sin (\omega {{t}_{1}})(\omega {{t}_{2}} - \omega {{t}_{1}}), \\ \sin (\omega {{t}_{2}}) = \sin (\omega {{t}_{1}}), \\ \end{gathered} $Анализ (5) показывает, что в данном случае периодическое поведение будет возможно при определенном числе ударов n = 4, 8, 12… за период.
В общем случае получить аналитические выражения для оценки необходимого значения отношения d0/A0 при заданном числе соударений и в этом случае не удается. Однако расчеты показывают, что с погрешностью менее 2% в интервале 1 < n < 24 зависимость отношения d0/A0 от числа соударений n подвижного электрода с ограничителями на ПСК за ПКК хорошо аппроксимируется показательной функцией
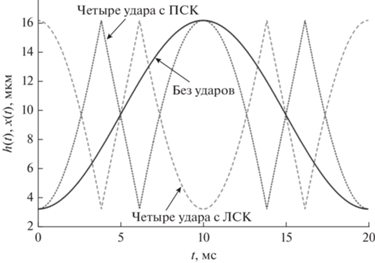
На рис. 7 приведены траектории движения левой и правой стенок корпуса, а также подвижных электродов в ударном (с четырьмя ударами за ПКК) и соответствующем безударном МЭМП, рассчитанные с начальными условиями, соответствующими второму случаю, при A0 = 2 × 10–5 м, T = 0.02 с, d0 = 1.292 × 10–5 м и m = 0.
Рис. 7.
Траектории движения левой (длинный пунктир) и правой (короткий пунктир) стенок корпуса, а также подвижных электродов в ударном – с четырьмя ударами (точки) и безударном (сплошная линия) МЭМП.
На рис. 8 приведены зависимости изменения зазоров между подвижным электродом и электродами на корпусе, от времени в ударном – с четырьмя ударами за ПКК и соответствующем безударном МЭМП, рассчитанные при тех же параметрах, что и на рис. 7 и m = 0.25.
Рис. 8.
Зависимости изменения зазоров между подвижным электродом и электродами на ПСК и ЛСК от времени в ударном – с четырьмя ударами (короткий пунктир – зазор до ПСК, длинный пунктир – до ЛСК) и соответствующем безударном (сплошная линия – зазор до ПСК) МЭМП.
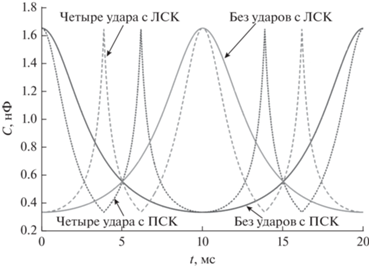
На рис. 9 приведены зависимости изменения емкости между подвижным электродом и электродом на ПСК от времени в ударном – с четырьмя ударами за ПКК и соответствующем безударном МЭМП, рассчитанные при тех же параметрах, что и на рис. 7 и 8, и площадью подвижного электрода S = 6 × 10–4 м2.
Рис. 9.
Зависимости изменения емкости между подвижным электродом и электродами на ПСК и ЛСК от времени в ударном – с четырьмя ударами (короткий пунктир – зазор до ПСК, длинный пунктир – до ЛСК) и соответствующем безударном (темная сплошная линия – зазор до ПСК, светлая сплошная линия – до ЛСК) МЭМП.
Сопоставление (4) и (6) показывает, что при одинаковых A0 и n необходимая максимальная величина зазора между ограничителями на ПСК и подвижным электродом d0 во втором случае (когда в начальный момент времени подвижный электрод соприкасается с ограничителями на ПСК) будет больше. Причем при увеличении n это различие возрастает. В результате в преобразователях с одинаковым числом ударов n за ПКК в первом случае максимальная и минимальная емкости будут больше, чем во втором случае.
Теперь, зная зависимости изменения емкости переменного конденсатора от времени, можно провести анализ работы микрогенератора в целом.
3. АНАЛИЗ РАБОТЫ МИКРОГЕНЕРАТОРА С ТРЕХЭЛЕКТРОДНЫМ МЭМП
Электрическая схема микрогенератора с трехэлектродным МЭМП (рис. 10) включает первичные источники питания V1 и V2, два ключа Sw1 и Sw2, трехэлектродный МЭМП (рис. 1), образующий С1 и С2 с заземленным подвижным электродом, и сопротивление нагрузки R.
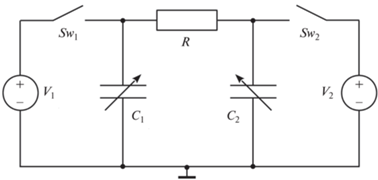
Перед началом работы емкости С1 и С2 заряжаются кратковременным подключением первичных источников V1 и V2. После чего ключи Sw1 и Sw2 размыкаются. При колебаниях корпуса преобразователя происходит смещение подвижного электрода относительно неподвижных, емкости С1 и С2 изменяются в противоположные стороны, изменяются потенциалы неподвижных электродов и напряжение на сопротивлении нагрузки R, что и используется для совершения полезной работы.
Система уравнений, описывающих работу данного микрогенератора, может быть представлена в виде:
(7)
$\begin{gathered} \frac{{\partial {{q}_{1}}}}{{\partial t}} = \frac{{{{q}_{2}}}}{{{{C}_{2}}(h(t))R}} - \frac{{{{q}_{1}}}}{{{{C}_{1}}(x(t))R}}, \\ \frac{{\partial {{q}_{2}}}}{{\partial t}} = \frac{{{{q}_{1}}}}{{{{C}_{1}}(x(t))R}} - \frac{{{{q}_{2}}}}{{{{C}_{2}}(h(t))R}}, \\ {{M}_{1}}\frac{{{{d}^{2}}h}}{{d{{t}^{2}}}} + B\frac{{dh}}{{dt}} + kh - {{F}_{e}} = - {{M}_{1}}\frac{{{{d}^{2}}y}}{{d{{t}^{2}}}}. \\ \end{gathered} $В качестве начальных условий будем полагать, что заряды конденсаторов в начальный момент времени равны соответственно q0,1 = V1C1(x(0)) и q0,2 = V2C2(h(0)), где в первом случае C1(x(0)) = = ε0εS/(md0) и C2(h(0)) = ε0εS/(md0 + d0), а во втором – C1(x(0)) = ε0εS/(md0 + d0) и C2(h(0)) = = ε0εS/(md0), здесь ε0 – электрическая постоянная, ε – относительная диэлектрическая проницаемость газа в межэлектродном зазоре, S – площади неподвижных электродов. При сделанных допущениях зависимости x(t) и h(t) для первого и второго случаев находятся в соответствии с методиками, описанными в разделе 2.
В общем случае решение системы (7) находится лишь численно. Однако, как показано в [22, 26, 27], если вынуждающая сила изменяется по гармоническому закону, т.е. y(t) = –A0cos(ωt), то в установившемся режиме для безударного микрогенератора решение системы (7) можно представить в аналитическом виде. Для ударного микрогенератора и в первом, и во втором случаях решение даже при изменении вынуждающей силы по гармоническому закону находится численно.
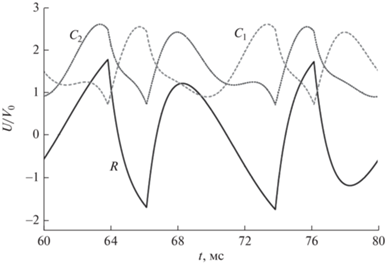
На рис. 11 и 12 приведены зависимости изменения нормированного напряжения на конденсаторах С1, С2 и сопротивлении нагрузки от времени для безударного и соответствующего ударного (с двумя ударами за период колебаний корпуса) МЭМП, рассчитанные для первого случая при тех же параметрах, что и на рис. 4 и 5: V1 = V2 = V0 = 1 В и R = 3.3 × 106 Ом для безударного и R = 7.4 × 105 Ом для соответствующего ударного микрогенераторов. Интервал времени на рис. 11 и 12 соответствует установившемуся режиму, напряжение на сопротивлении нагрузки определялось как UR = UC2 – UC1.
Рис. 11.
Зависимости изменения нормированного напряжения на конденсаторах С1 (длинный пунктир) и С2 (короткий пунктир) и сопротивлении нагрузки (сплошная линия) от времени для безударного МЭМП.
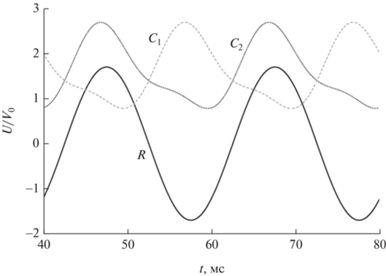
Рис. 12.
Зависимости изменения нормированного напряжения на конденсаторах С1 (длинный пунктир) и С2 (короткий пунктир) и сопротивлении нагрузки (сплошная линия) от времени для ударного (с двумя ударами) МЭМП.
Видно (рис. 11), что напряжение на резисторе R в безударном микрогенераторе изменяется по гармоническому закону, что соответствует выводам [22, 26, 27]. В тоже время напряжение на каждом конденсаторе изменяется не по гармоническому закону (рис. 11), причем с увеличением амплитуды смещения подвижного электрода изменения напряжений на конденсаторах вообще начинают происходить на частоте 2ω, что является следствием нелинейности системы (7). При этом напряжение на резисторе нагрузки будет продолжать изменяться на частоте ω.
В случае ударного микрогенератора и напряжение на конденсаторах С1, С2, и на сопротивлении нагрузки R изменяются не по гармоническому закону (рис. 12) и определяются изменениями зазоров между электродами, показанными на рис. 4.
Аналогичная ситуация имеет место и во втором случае. При этом зависимости изменения нормированных напряжений на конденсаторах С1, С2 и сопротивлении нагрузки от времени для безударного МЭМП имеют вид, совпадающий с приведенным на рис. 11.
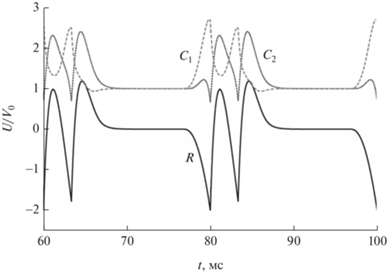
Зависимости же изменения нормированных напряжений на конденсаторах С1, С2 и сопротивлении нагрузки от времени для ударного (с четырьмя ударами за период колебаний корпуса) МЭМП, рассчитанные при тех же параметрах, что и на рис. 8 (V1 = V2 = V0 = 1 В и R = 3.6 × 106 Ом), приведены на рис. 13. Интервал времени на рис. 13 также соответствует установившемуся режиму, а напряжение на сопротивлении нагрузки UR = UC2 – UC1.
Рис. 13.
Зависимости изменения нормированного напряжения на конденсаторах С1 (длинный пунктир) и С2 (короткий пунктир) и сопротивлении нагрузки (сплошная линия) от времени для ударного (с четырьмя ударами) МЭМП.
Видно, что и в этом случае напряжения на конденсаторах С1, С2 и сопротивлении нагрузки R у ударного микрогенератора изменяются не по гармоническому закону и определяются изменениями зазоров между электродами, показанными на рис. 8.
Чтобы определить, возможен ли выигрыш в генерируемой мощности и отдаваемой в нагрузку энергии при использовании ударных МЭМП, рассчитывались зависимости энергии, передаваемой в нагрузку и забираемой от первичного источника питания, за период колебаний корпуса, а также скорость передачи энергии (мощность) от сопротивления нагрузки для микрогенераторов с различным количеством ударов n и соответствующих им безударных микрогенераторов. Соответствие означает, что у ударного и соответствующего безударного МЭМП одинаковые отношения d0/A0 и высоты ограничителей. При анализе работы безударного МЭМП “n” показывает, какому ударному МЭМП соответствуют параметры данного безударного.
Расчеты показали, что с увеличением сопротивления нагрузки и у безударного, и у ударного микрогенераторов энергия, отдаваемая в нагрузку за ПКК, и развиваемая мощность сначала увеличиваются, а затем уменьшаются. Т.е. есть максимум и соответствующее ему оптимальное сопротивление нагрузки Ropt. В то же время энергия, забираемая из первичных источников питания, при изменении сопротивления нагрузки остается постоянной. При этом с увеличением сопротивления нагрузки отношение энергии, передаваемой в нагрузку за ПКК, к энергии, забираемой из первичного источника питания, также имеет максимум. Отметим, что зависимости, приведенные на рис. 11–13, рассчитаны при соответствующих Ropt.
На рис. 14 приведены зависимости Ropt от числа ударов n за ПКК для ударных и соответствующих им безударных микрогенераторов. Эти зависимости в двойном логарифмическом масштабе имеют вид прямых и хорошо описываются показательными функциями вида b0nb1. Учитывая [22, 26, 27], (4) и (6) можно показать, что для безударных генераторов Ropt(n) = 2/(ωC0(n)), где C0(n) = = ε0εS/[(0.5 + m)d0(n)]. При этом в первом случае d0(n) определяется (4) (т.е. максимальным зазором между подвижным электродом и ограничителями на ПСК), а во втором – (6) (т.е. максимальным зазором между подвижным электродом и ограничителями на ЛСК).
Рис. 14.
Зависимости Ropt от числа соударений n для ударных (1, 3) и соответствующих им безударных (2, 4) микрогенераторов. 1, 2 – первый случай, 3, 4 – второй случай.
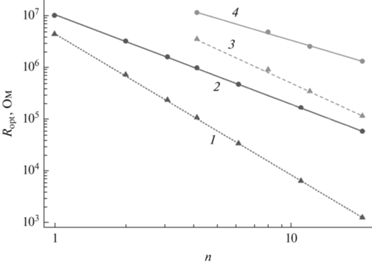
Отметим, что с увеличением n значение Ropt для ударных микрогенераторов уменьшается быстрее, чем для безударных (рис. 14).
На рис. 15 показаны зависимости максимальной развиваемой мощности от числа ударов за ПКК для ударных и соответствующих им безударных микрогенераторов, рассчитанные с использованием (7) при Ropt в первом и втором случае.
Рис. 15.
Зависимости максимальной мощности от числа соударений n для ударных (1, 3) и соответствующих им безударных (2, 4) микрогенераторов. 1, 2 – первый случай, 3, 4 – второй случай.
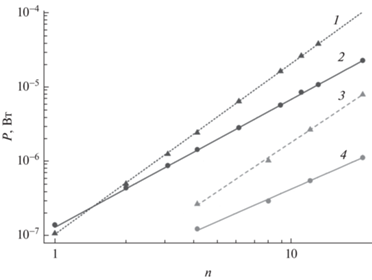
Видно, что в двойном логарифмическом масштабе и эти зависимости имеют вид прямых. При этом в обоих случаях с увеличением n мощность ударного микрогенератора растет быстрее, чем у безударного, и при n ≥ 2 скорость передачи энергии в нагрузку у ударного микрогенератора становится больше, чем у безударного. При одинаковых n развиваемая мощность в первом случае, когда подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК, оказывается больше, чем во втором, когда подвижный электрод изначально касается ограничителей, расположенных на ПСК. Анализ показывает, что во многом это происходит за счет большего потребления энергии первичного источника питания в первом случае, чем во втором.
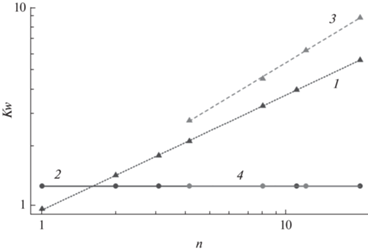
Не менее важным параметром, характеризующим работу микрогенератора, является отношение Kw энергии Wr, передаваемой в нагрузку за ПКК, к энергии Wv, забираемой от первичного источника питания.
На рис. 16 приведены зависимости Kw от числа ударов n за ПКК для ударных и соответствующих им безударных микрогенераторов, рассчитанные при Ropt. С увеличением n для ударных микрогенераторов это отношение увеличивается, причем в первом случае оно меньше, чем во втором. В то же время для безударных микрогенераторов значение отношения Wr/Wv в первом и во втором случае одинаковое, и практически не меняется, но при n ≥ 2 оно меньше, чем для ударных микрогенераторов.
Рис. 16.
Зависимости отношения Kw энергии Wr, передаваемой в нагрузку за период колебаний, к энергии Wv, забираемой от первичного источника питания, от числа соударений n для ударных (1, 3) и соответствующих им безударных (2, 4) микрогенераторов. 1, 2 – первый случай, 3, 4 – второй случай.
Сопоставляя рис. 15 и 16, видим, что первый случай является предпочтительным, так как в этом случае развиваемая мощность больше, а несколько большее потребление энергии не имеет большого значения, так как энергия от первичного источника забирается лишь один раз перед началом работы, передача же энергии в нагрузку происходит в каждом периоде. В результате через несколько периодов работы энергия, переданная в нагрузку, становится много больше, чем взятая из первичного источника.
4. ОБСУЖДЕНИЕ
Проведенные исследования трехэлектродного МЭМП показали, что движение подвижного электрода будет периодическим только при определенных соотношениях между максимальным межэлектродным зазором d0 и амплитудой колебаний корпуса A0, а зависимость отношения d0/A0 от количества соударений n за ПКК в интервале 1 ≤ n < 20 хорошо аппроксимируется показательными функциями вида b0nb1.
При неизменной высоте ограничителей максимальная глубина модуляции емкости с увеличением числа соударений уменьшается. Если же одновременно с уменьшением отношения d0/A0 пропорционально уменьшать и высоту ограничителей, то максимальная глубина модуляции емкости у МЭМП будет оставаться неизмененной. Для достижения одинакового числа соударений n в первом случае потребуется большее отношение d0/A0, чем во втором.
Различие в поведении подвижного электрода в рассмотренных случаях связано с различным первоначальным положением подвижного электрода относительно неподвижных (с разными начальными условиями). В первом случае в начальный момент времени t0 = 0 подвижный электрод при любом n соприкасается с ограничителями на ЛСК, и с началом движения корпуса вправо начинает движение, подталкиваемый ЛСК. Их совместное движение с одинаковой скоростью всегда продолжается до тех пор, пока скорость корпуса не достигнет значения A0ω. Во втором же случае подвижный электрод в начальный момент соприкасается с ограничителями на ПСК и начинает движение лишь после того, как ЛСК пройдет расстояние d0. Так как d0 зависит от числа соударений n, то начальные координата и скорость подвижного электрода во втором случае зависят от n.
В свою очередь анализ работы микрогенератора с трехэлектродным МЭМП показал что зависимости энергии, отдаваемой в нагрузку за ПКК, и развиваемой мощности от сопротивления нагрузки имеют максимум при Ropt. Причем с увеличением n значение Ropt в случае ударного микрогенератора уменьшается быстрее, чем в случае безударного. Эти зависимости также хорошо описываются показательными функциями вида b0nb1.
С увеличением n мощность ударного микрогенератора растет быстрее, чем безударного. Причем зависимости максимальной мощности от числа ударов за период колебаний корпуса ударных и соответствующих им безударных генераторов хорошо описываются показательными функциями.
С увеличением n отношение энергии Wr, передаваемой в нагрузку за ПКК к энергии Wv, забираемой от первичного источника питания, в случае микрогенератора ударного типа при Ropt монотонно растет. В то время как у безударного микрогенератора не меняется. В результате при n ≥ 2 ударный микрогенератор эффективнее преобразует энергию первичного источника питания, чем соответствующий безударный.
В случае, когда подвижный электрод изначально касается ограничителей, расположенных на ПСК, микрогенератор эффективнее преобразует энергию, полученную от первичных источников, хотя и развивает меньшую мощность, чем в случае, когда подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК.
Отметим, что микрогенератор с трехэлектродным МЭМП вырабатывает переменное напряжение. Однако так как в нем после первоначального заряда конденсаторов заряд от первичного источника питания не отбирается, то потенциально период между обслуживаниями первичного источника питания при использовании микрогенератора данного типа может быть не ограничен и определяется лишь паразитными утечками.
ЗАКЛЮЧЕНИЕ
Проанализирована работа микрогенераторов с трехэлектродным МЭМП в ударном периодическом режиме для двух крайних случаев: 1) подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК и 2) подвижный электрод изначально касается ограничителей, расположенных на ПСК.
Определены необходимые условия для реализации периодического ударного режима работы в МЭМП и соотношения параметров преобразователя и источника внешней вынуждающей силы.
Проведено сравнение эффективности работы ударных и соответствующих им безударных микрогенераторов.
Установлено, что при использовании ударного преобразователя возможен выигрыш в развиваемой мощности в 2–5 раз при значительном снижении на 1–2 порядка величины оптимального сопротивления нагрузки по сравнению с использованием соответствующего безударного преобразователя.
Показано, что микрогенератор с трехэлектродным МЭМП в случае, когда подвижный электрод изначально соприкасается с ограничителями, расположенными на ЛСК, развивает большую мощность, чем в случае, когда подвижный электрод изначально касается ограничителей, расположенных на ПСК, хотя он менее эффективно преобразует энергию, полученную от первичных источников.
В целом, проведенный анализ и развиваемый подход позволяют существенно сузить диапазон поиска необходимых параметров системы на этапе предварительного проектирования и сократить время проектирования.
Исследование выполнено при финансовой поддержке в рамках реализации программы развития НГТУ, научный проект № С22-20.
Список литературы
Shaikh F.K., Zeadally S. Energy harvesting in wireless sensor networks: A comprehensive review // Renewable and Sustainable Energy Reviews. 2016. V. 55. P. 1041–1054. https://doi.org/10.1016/j.rser.2015.11.010
Kamalinejad P., Mahapatra C., Sheng Z., Mirabbasi S., M. Leung V.C., Guan Y.L. Wireless energy harvesting for the Internet of Things // IEEE Commun. Mag. 2015. V. 53. № 6. P. 102–108. https://doi.org/10.1109/MCOM.2015.7120024
Elvin N.G., Elvin A.A. An experimentally validated electromagnetic energy harvester // Journal of Sound and Vibration. 2011. V. 330. № 10. P. 2314–2324. https://doi.org/10.1016/j.jsv.2010.11.024
Li Z., Yan Z., Luo J., Yang Z. Performance comparison of electromagnetic energy harvesters based on magnet arrays of alternating polarity and configuration // Energy Conversion and Management. 2019. Vol. 179. P. 132–140. https://doi.org/10.1016/j.enconman.2018.10.060
Zhou S., Cao J., Inman D.J., Lin J., Liu S., Wang Z. Broadband tristable energy harvester: Modeling and experiment verification // Applied Energy. 2014. V. 133. P. 33–39. https://doi.org/10.1016/j.apenergy.2014.07.077
Wang J., Zhou S., Zhang Z., Yurchenko D. High-performance piezoelectric wind energy harvester with Y-shaped attachments // Energy Conversion and Management. 2019. V. 181. P. 645–652. https://doi.org/10.1016/j.enconman.2018.12.034
Tao K., Lye S.W., Miao J., Hu X. Design and implementation of an out-of-plane electrostatic vibration energy harvester with dual-charged electret plates // Microelectronic Engineering. 2015. V. 135. P. 32–37. https://doi.org/10.1016/j.mee.2015.02.036
Khan F.U., Qadir M.U. State-of-the-art in vibration-based electrostatic energy harvesting // J. Micromech. Microeng. 2016. V. 26. № 10. P. 103001. https://doi.org/10.1088/0960-1317/26/10/103001
Zhao C., Yang Y., Upadrashta D., Zhao L. Design, modeling and experimental validation of a low-frequency cantilever triboelectric energy harvester // Energy. 2021. V. 214. P. 118885. https://doi.org/10.1016/j.energy.2020.118885
Toyabur Rahman M., Sohel Rana S., Salauddin Md., Maharjan P., Bhatta T., Kim H., Cho H., Park J.Y. A highly miniaturized freestanding kinetic-impact-based non-resonant hybridized electromagnetic-triboelectric nanogenerator for human induced vibrations harvesting // Applied Energy. 2020. V. 279. P. 115799. https://doi.org/10.1016/j.apenergy.2020.115799
Lagomarsini C., Jean-Mistral C., Monfray S., Sylvestre A. Optimization of an electret-based soft hybrid generator for human body applications // Smart Mater. Struct. 2019. V. 28. № 10. P. 104003. https://doi.org/10.1088/1361-665X/ab3906
Ostertak D.I. Experimental evaluation of parameters of the capacitive MEMS converters // 2009 International School and Seminar on Modern Problems of Nanoelectronics, Micro- and Nanosystem Technologies. Novosibirsk, Russia: IEEE, 2009. P. 97–102. https://doi.org/10.1109/INTERNANO.2009.5335626
Dragunov V.P., Ostertak D.I., Pelmenev K.G., Sinitskiy R.E., Dragunova E.V. Electrostatic vibrational energy converter with two variable capacitors // Sensors and Actuators A: Physical. 2021. V. 318. P. 112501. https://doi.org/10.1016/j.sna.2020.112501
Baginsky I., Kostsov E., Sokolov A. Single-Capacitor Electret Impact Microgenerator // Micromachines. 2016. V. 7. № 1. P. 5. https://doi.org/10.3390/mi7010005
Su W.-J. Impact-driven broadband piezoelectric energy harvesting using a two-degrees-of-freedom structure // Microsyst Technol. 2020. V. 26. № 6. P. 1915–1924. https://doi.org/10.1007/s00542-019-04744-1
Lu Y., Juillard J., Cottone F., Galayko D., Basset P. An Impact-Coupled MEMS Electrostatic Kinetic Energy Harvester and Its Predictive Model Taking Nonlinear Air Damping Effect Into Account // J. Microelectromech. Syst. 2018. V. 27. № 6. P. 1041–1053. https://doi.org/10.1109/JMEMS.2018.2876353
Le C.P., Halvorsen E., Søråsen O., Yeatman E.M. Microscale electrostatic energy harvester using internal impacts // Journal of Intelligent Material Systems and Structures. 2012. V. 23. № 13. P. 1409–1421. https://doi.org/10.1177/1045389X12436739
Phu C., Halvorsen E. Microscale Energy Harvesters with Nonlinearities Due to Internal Impacts // Small-Scale Energy Harvesting / Ed. Lallart M. InTech, 2012. Ch. 11. P. 265–282. https://doi.org/10.5772/52048
Basset P., Galayko D., Cottone F., Guillemet R., Blokhina E., Marty F., Bourouina T. Electrostatic vibration energy harvester with combined effect of electrical nonlinearities and mechanical impact // J. Micromech. Microeng. 2014. V. 24. № 3. P. 035001. https://doi.org/10.1088/0960-1317/24/3/035001
Cao Y., Shen W., Li F., Qi H., Wang J., Mao J., Yang Y., Tao K. All-in-One High-Power-Density Vibrational Energy Harvester with Impact-Induced Frequency Broadening Mechanisms // Micromachines. 2021. V. 12. № 9. P. 1083. https://doi.org/10.3390/mi12091083
Tao K., Tang L., Wu J., Lye S.W., Chang H., Miao J. Investigation of Multimodal Electret-Based MEMS Energy Harvester With Impact-Induced Nonlinearity // J. Microelectromech. Syst. 2018. V. 27. № 2. P. 276–288. https://doi.org/10.1109/JMEMS.2018.2792686
Dragunov V., Ostertak D., Kiselev D., Dragunova E. Impact-enhanced electrostatic vibration energy harvester // J. Appl. Comput. Mech. 2022. V. 8(2). P. 671–683. https://doi.org/10.22055/jacm.2021.38781.3312
Голдсмит В. Удар. Теория и физические свойства соударяемых тел. М.: Стройиздат, 1965. 448 с.
Козлов В.В., Трещев Д.В. Биллиарды. М.: Изд-во МГУ. 1991. 168 с.
Фейгин М.И. Вынужденные колебания систем с разрывными нелинейностями. М.: Наука, 1994. 228 с.
Драгунов В.П. Микромеханический электростатический преобразователь. // Доклады Академии наук высшей школы Российской Федерации. 2007, № 1(8). С. 56–66.
Драгунов В.П. Нелинейная динамическая модель упругого элемента микромеханических систем // Микросистемная техника. 2004. № 10. С. 23–29.
Дополнительные материалы отсутствуют.
Инструменты
Микроэлектроника