

Океанология, 2022, T. 62, № 5, стр. 811-824
Опыт использования автономного необитаемого подводного аппарата “ММТ-3000” для исследований бентосных сообществ Антарктики
А. И. Боровик 1, Е. И. Рыбакова 2, *, С. В. Галкин 2, Д. Н. Михайлов 1, А. Ю. Коноплин 1
1 Федеральное государственное бюджетное учреждение науки
Институт проблем морских технологий ДВО РАН
Владивосток, Россия
2 Институт океанологии им. П.П. Ширшова РАН
Москва, Россия
* E-mail: gorolen@mail.ru
Поступила в редакцию 22.03.2022
После доработки 29.03.2022
Принята к публикации 28.04.2022
- EDN: OGXSVT
- DOI: 10.31857/S0030157422050033
Аннотация
В статье описываются особенности и результаты использования автономного необитаемого подводного аппарата (АНПА) “ММТ-3000” для исследований экосистем Антарктики и глубоководных биологических ресурсов Южных морей. Обсуждается методика работы с АНПА в экстремальных условиях Антарктики, а также технические решения, использованные для визуальной оценки распределения донных животных. Приведены результаты обработки данных, полученных АНПА при выполнении глубоководных миссий в Атлантическом секторе Антарктики в экспедиции на НИС “Академик Мстислав Келдыш” (рейс 79) в 2020 году. При этом выполнено сравнение данных фотоанализа и тралового улова. На основе приобретенного опыта определены требования, реализованные в новом АНПА “ММТ-3500”, который разработан и изготовлен для эффективного выполнения глубоководных исследований в последующих экспедициях в Южном океане.
ВВЕДЕНИЕ
В настоящее время отечественными и зарубежными исследователями накоплен большой опыт эффективного использования подводных аппаратов различного типа для исследования глубин Мирового океана [5, 11, 19, 23]. Экстремальные условия изучаемых Антарктических морей, характеризуемые большими глубинами, сильными течениями, сложным рельефом донной поверхности, дрейфующими айсбергами и ледовым покрытием, затрудняют использование телеуправляемых необитаемых подводных аппаратов (ТНПА). Кабели связи с судном-носителем ограничивают перемещения ТНПА, при этом существует высокий риск попадания этих кабелей в лопасти винтов маршевого и подруливающих движителей судна.
В отличие от ТНПА, автономные необитаемые подводные аппараты (АНПА) не требуют многочисленного обслуживающего персонала, а также транспортировки и использования габаритных лебедок. Поэтому аппараты такого класса активно применяются в арктических и антарктических экспедициях [3, 14, 15, 17], где с их помощью выполняется бесконтактный мониторинг морских донных экосистем с картированием биоценозов и учетом численности гидробионтов.
Для экологических исследований в экспедиции в Атлантическом секторе Антарктики на НИС “Академик Мстислав Келдыш” (рейс 79) в 2020 году была предложена методика совместного использования АНПА “ММТ-3000” и траления тралом Сигсби для описания видового разнообразия и количественных характеристик донной фауны. В статье описываются особенности этой методики, а также созданные технические средства, позволяющие АНПА выполнять бесконтактный мониторинг донных экосистем Антарктики. Кроме того, приводятся результаты обработки данных, полученных АНПА, и сравнение с данными, полученными тралом Сигсби при проведении экспедиционных экологических исследований. На основе приобретенного опыта определены перспективы модернизации подводной техники, разрабатываемой для эффективного выполнения глубоководных исследований в дальнейших экспедициях.
МАТЕРИАЛ И МЕТОДЫ
Технические особенности АНПА “ММТ-3000”
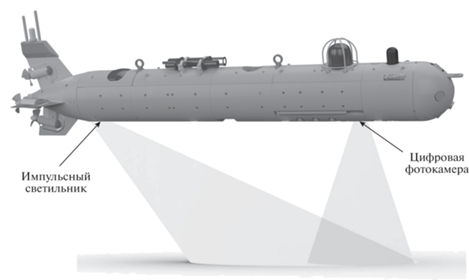
Для выполнения глубоководных осмотровых работ в экспедиции использовался АНПА “ММТ-3000” [8], разработанный и изготовленный в Институте проблем морских технологий (ИПМТ ДВО РАН). Этот аппарат, изображенный на рис. 1, способен автономно работать до 20 часов на глубинах до 3000 м, выполняя миссию, описывающую желаемые маршрут и режимы его движения. Перед погружением АНПА оператор задает миссии с помощью системы планирования [2]. Габаритные размеры аппарата – 305 × 58 × 100 см (с учетом высоты антенны радиомодема), вес на воздухе – 280 кг.
Управление перемещениями АНПА в диапазоне скоростей от 0.1 до 2 м/с, а также маневрирование в вертикальной и горизонтальной плоскостях обеспечиваются четырьмя маршевыми движителями и одним подруливающим, установленным в центральной части АНПА, причем продольная ось этого движителя перпендикулярна продольной оси аппарата. В результате во время движения АНПА может стабилизировать заданные курс, глубину погружения, расстояние до дна (высоту), а также автоматически обнаруживать и безопасно обходить препятствия (неровности рельефа дна, затонувшие объекты и др.).
Для распознавания окружающей обстановки и определения параметров движения “ММТ-3000” оборудован бортовой инерциальной комплексированной навигационной системой [4], включающей GPS, эхолокационную подсистему, датчик глубины, доплеровский лаг, магнитный компас, а также оптоволоконный гироскоп, используемый для корректировки магнитного курса.
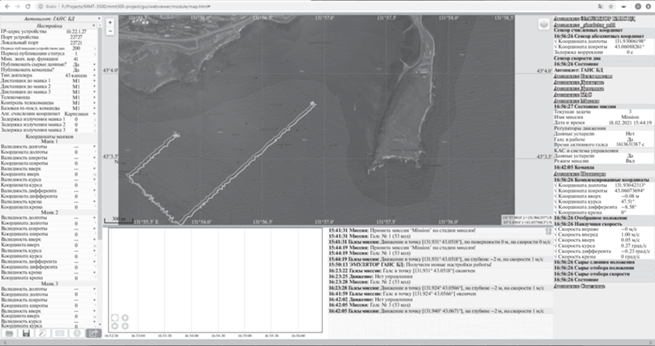
Координаты АНПА определяются гидроакустической навигационной системой с ультракороткой базой (ГАНС УКБ) Evologics, антенна которой установлена на судне, и передаются на аппарат по акустическому каналу связи для дальнейшей коррекции его бортовой системы счисления пути. Для измерения местоположения и ориентации судна-носителя в составе ГАНС УКБ используется высокоточная спутниковая система Applanix POS MV V5. На основе полученной навигационной информации графическим интерфейсом поста оператора (рис. 2) отображаются треки перемещений судна-носителя и АНПА, а также данные телеметрии, получаемой от аппарата по гидроакустическому каналу связи. С помощью телекоманд, передаваемых оператором по этому каналу связи, реализована возможность корректирования миссий АНПА в процессе его работы под водой. Интерфейс оператора также позволяет задавать целевые точки и указывать местоположения подводных объектов посредством ввода географических координат или с помощью отметок на загруженной карте зоны работ.
Этот же графический интерфейс отображается и на бортовом компьютере вахтенного штурмана судна, что дает ему полную информацию о процессе выполнения АНПА подводной миссии и позволяет в реальном масштабе времени корректировать маршрут судна. При движении АНПА по запланированной траектории оператор заблаговременно дает необходимые команды экипажу судна для его перемещения в заданном направлении на заданное расстояние, чтобы аппарат не вышел за пределы действия ГАНС УКБ.
Научное оборудование АНПА “ММТ-3000”
АНПА “ММТ-3000” оборудован разработанной в ИПМТ ДВО РАН цифровой фотосистемой, которая обеспечивает получение, сжатие и накопление (с привязкой к общему времени аппарата) цветных цифровых фотоизображений с высоты 1–3 м от дна при скорости движения АНПА до 1 м/с и относительной прозрачности воды не менее 7 м. Разрешение итогового изображения позволяет обнаружить и идентифицировать объекты с минимальными размерами 10–20 мм.
При проектировании фотосистемы были учтены специфические особенности подводной фотосъемки, усложняющие выделение и распознавание объектов:
− в условиях отсутствия естественного освещения используется точечный источник света, что приводит к неравномерной освещенности объектов;
− находящиеся в воде частицы отражают свет, что приводит к засветке от переднего фона и ослаблению отраженного объектами света;
− неравномерное для разных длин волн затухание света в морской воде, которое приводит к искажению цветовых характеристик объектов.
Для уменьшения влияния засветки переднего фона источник света и фотокамера разнесены, как показано на рис. 1, чтобы излученный свет не облучал область перед камерой. Для уменьшения влияния неравномерного для разных длин волн затухания света в морской воде использован мощный источник света и компьютерная постобработка, обеспечивающая ввод индивидуальных коэффициентов усиления для отдельных цветовых компонентов с целью получения баланса белого цвета.
В состав фотосистемы, структурная схема которой изображена на рис. 3, входят:
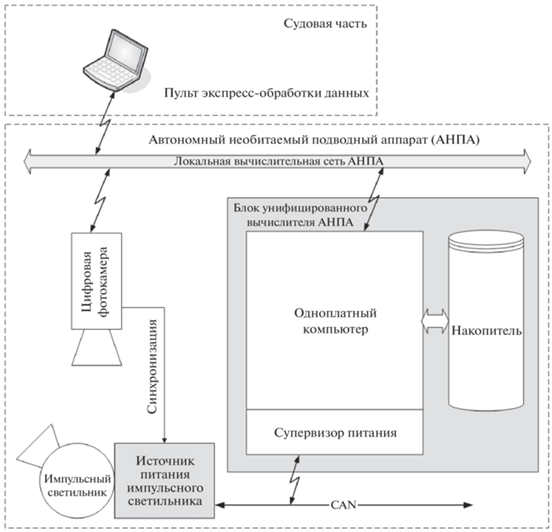
− цифровая фотокамера Prosilica GC1380;
− блок унифицированного вычислителя АНПА (бортовой компьютер системы технического зрения), включающий: одноплатный компьютер формата COM Express Type 10 с установленным драйвером фотокамеры, супервизор питания и накопитель на твердотельном диске;
− импульсный светильник, состоящий из импульсной газоразрядной лампы и накопительного конденсатора;
− источник питания импульсного светильника, который осуществляет заряд накопительного конденсатора, а также его разряд через лампу по приходу запускающего импульса.
Вычислитель, фотокамера и импульсный светильник размещаются в отдельных герметичных прочных контейнерах аппарата. Цифровая фотосистема является унифицированным функционально законченным устройством локальной вычислительной сети АНПА с интерфейсом Ethernet 100BASE-T. Технические характеристики этой системы приведены в таблице 1.
Таблица 1.
Характеристики фотосистемы АНПА
| Наименование параметра | Величина |
|---|---|
| Номинальное напряжение питания, В | 24 |
| Диапазон напряжений питания, В | 19…30 |
| Средний потребляемый ток, А | Не более 0.5 |
| Пиковый потребляемый ток (при заряде накопителя), А | Не более 6 |
| Фокусное расстояние объектива, мм | 8 |
| Относительное отверстие объектива | 1.4–16 |
| Размеры изображения, точек | 1360 × 1024 |
| Минимальный период съемки, с | 2 |
| Диапазон рабочих температур окружающего воздуха, °С | –4…+35 |
| Диапазон температур хранения, °С | –40…+85 |
| Относительная влажность воздуха, % , при 25°С без конденсации влаги | 5…95 |
| Вибрации с ускорением, g | 5 |
| Ударные нагрузки одиночного действия, g | 20 |
| Масса камеры цифровой, кг | 0.3* |
| Масса источника питания импульсного светильника, кг | 0.6* |
| Масса импульсного светильника, кг | 1.6* |
| Энергия вспышки импульсного светильника, Дж | Не менее 60 |
| Время заряда конденсатора импульсного светильника, с | Не более 2 |
| Формат выходного изображения | TIFF |
| Размер кадра выходного изображения, байт | 4 178 100 |
Для постобработки данных используется программное обеспечение IMTPLooker, которое позволяет привязать фотокадры к любым регистрируемым на борту АНПА параметрам (координатам, дифференту, высоте над грунтом, скорости движения и т.п.), настроить яркость и контрастность изображения, подобрать индивидуальные коэффициенты усиления для отдельных цветовых компонентов, а также выгрузить выбранные снимки с нанесенной информацией и заданным прореживанием в директорию на жестком диске. В ходе экспедиции программа была доработана с целью отображения поверх фотокадра линейки для оценки геометрических размеров подводных объектов.
При расчете геометрических размеров кадра и углов зрения фотокамеры в воде преломление света на границах вода–стекло и стекло–воздух рассматривалось как преломление вода–воздух, поскольку преломлением лучей в плоском стеклянном иллюминаторе можно пренебречь. При этом учитывалось, что угол ${{i}_{1}}$ падения луча света в воздухе связан с углом ${{i}_{2}}$ его преломления в воде следующей зависимостью: ${{n}_{1}}\sin {{i}_{1}} = {{n}_{2}}\sin {{i}_{2}}$, где ${{n}_{1}},{{n}_{2}}$ – показатели преломления воздуха и воды соответственно. Причем ${{n}_{1}}$ = 1, а параметр ${{n}_{2}}$, зависящий от солености и температуры воды, в условиях экспедиции был принят равным 1.34 согласно эмпирической формуле, приведенной в работе [18]. Углы зрения камеры в воде по горизонтали и вертикали вычислялись с учетом размещения камеры в контейнере с плоским иллюминатором, исходя из соотношения $\frac{{\sin \frac{{{{\alpha }_{1}}}}{2}}}{{\sin \frac{{{{\alpha }_{2}}}}{2}}} = \frac{{{{n}_{2}}}}{{{{n}_{1}}}}$, где ${{\alpha }_{1}}$ – угол зрения на воздухе, ${{\alpha }_{2}}$ – соответствующий ему угол зрения в воде. Ширина $L$ и высота $H$ кадра рассчитывались по формулам L = $ = 2~h{\text{tg}}\frac{{{{\alpha }_{L}}}}{2},$ $H = 2~h{\text{tg}}\frac{{{{\alpha }_{H}}}}{2}$ , где $h$ – высота АНПА над донной поверхностью в момент съемки, ${{\alpha }_{L}}$ и ${{\alpha }_{H}}$ – углы зрения камеры в воде по горизонтали и вертикали соответственно.
Для измерения высоты над дном в АНПА “ММТ-3000” используется многоканальная эхолокационная система производства ИПМТ ДВО РАН с рабочей дальностью от 0.5 до 65 метров и разрешающей способностью по дальности 1.5 см.
Для измерения параметров окружающей водной среды АНПА “ММТ-3000” был оснащен флуориметрами FLCDRT-926 и FLNTU-665, а также прибором CTD-NV-2406. Эти автономные океанографические приборы позволили формировать таблицу измерений следующих параметров морской среды: концентрация растворенных органических веществ (CDOM) и хлорофилла, проводимость, температура и мутность воды, а также скорость звука. Все измерения привязаны к навигационной информации АНПА, включающей его текущие координаты, курс, крен, дифферент, глубину и скорость движения.
Для получения данных о рельефе дна и характере грунта в состав АНПА “ММТ-3000” штатно входят гидролокатор бокового обзора (ГБО) и акустический профилограф производства ИПМТ ДВО РАН. ГБО имеет рабочую частоту 470 кГц, полосу обзора 70 м на борт, разрешающую способностью по дальности – 5 см, по азимуту – 0.5 град. Акустический профилограф позволяет производить профилирование дна на глубину до 40 м.
Методика выполнения экологических исследований с использованием АНПА
В рамках экспедиционных экологических исследований в заданном районе работ сначала выполнялись промеры судовым эхолотом, на основе которых формировалась уточненная карта глубин интересующего полигона. Эта карта загружалась в графический интерфейс оператора АНПА и на ней строились желаемые маршруты движения аппарата. При движении по этим маршрутам перед АНПА ставилась задача обследования донной поверхности путем выполнения фотосъемки, съемки ГБО, профилирования, а также измерения параметров окружающей водной среды. С учетом опыта выполнения аналогичных осмотровых операций ТНПА Sub-Atlantic “Comanche 18” в глубоководных экспедициях [5, 9, 12] задавались следующие параметры движения АНПА.
Сначала “ММТ-3000” перемещался с постоянной скоростью около 1.5 м/с на высоте 7 м над донной поверхностью для съемки ГБО и одновременного получения данных от акустического профилографа и эхолокационной системы. Полученные данные необходимы для детализированного картирования зоны работ, определения сложности рельефа дна и состава грунта. На основе этой информации впоследствии принимались решения о целесообразности (безопасности) траления тралом Сигсби на исследуемом полигоне, а также использования дночерпателей. Затем АНПА опускался до высоты 1 м над дном и, двигаясь прямолинейно с постоянной скоростью около 0.5 м/с, делал фоторазрезы для картирования донных биоценозов и учета численности гидробионтов. С помощью набора океанографических датчиков АНПА определял гидрофизические и гидрохимические характеристики воды при движении по маршруту, а также в процессе погружения и всплытия.
После завершения миссии все данные, собранные АНПА, скачивались и передавались представителям бентосного отряда экспедиции.
Необходимо отметить, что технология использования АНПА для решения исследовательских задач, которая затрагивает вопросы планирования подводных работ, управления АНПА, организации погружений и взаимодействий с экипажем судна-носителя, подробно описана в работе [1].
Фотопрофилирование в районе исследований в Антарктике
Фотопрофилирование с использованием АНПА “ММТ-3000” было проведено на глубине 550–553 м на склоне восточной части Антарктического полуострова (рис. 4) на комплексной станции с координатами 61.4325° ю.ш., 52.2258° з.д. В данной миссии АНПА выполнил два прямолинейных прохода (галса) длиной 1 км и расстоянием между ними 100 м. При движении по этим галсам аппарат выполнил профилографическую и ГБО-съемку рельефа дна. Затем была выполнена маршрутная фотосъемка дна при движении заданным курсом на высоте 1 м над грунтом. На рисунке 4 изображена траектория движения аппарата при фотосъемке на 3D-модели рельефа дна, построенной по показаниям бортового эхолокатора. Характеристики полученной фототрансекты представлены в таблице 2. В результате фотосъемки были получены изображения гидробионтов, позволяющие провести оценку особенностей их распределения. На основе полученных данных было принято решение выполнить траление (тралом Сигсби) вдоль траектории движения АНПА. При проведении траления глубина касания тралом дна и отрыва трала от дна определялась по эхолоту, установленному на судне, а координаты касания и отрыва трала от дна определялись по GPS координатам судна (табл. 2).
Рис. 4.
Район исследований в 79-м рейсе НИС “Академик Мстислав Келдыш”, траектория фотосъемки АНПА “ММТ-3000” и траления (ст. 6599) на 3D-модели рельефа дна, построенной по показаниям бортового эхолокатора.
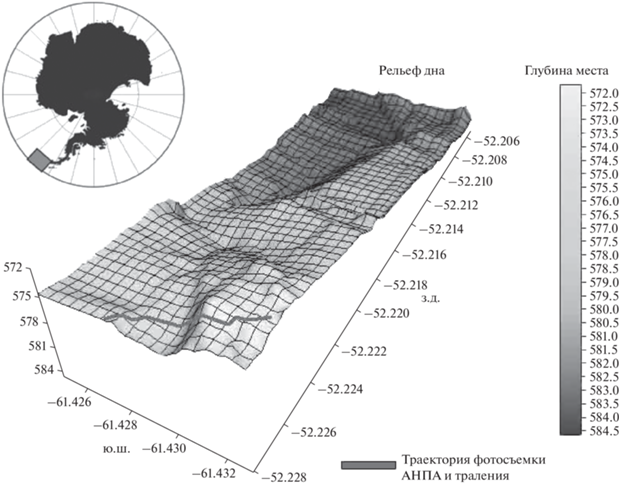
Таблица 2.
Характеристики фототрансекты и траловой станции
| Прибор | Дата | Расположение | Время фотосъемки, мин/время траления, мин | Длина фототрансекты, м/длина трека трала, м | |||||
|---|---|---|---|---|---|---|---|---|---|
| начало фотосъемки/ касание тралом дна | конец фотосъемки/ отрыв трала от дна | ||||||||
| широта, южная | долгота, западная | глубина, м | широта, южная | долгота, западная | глубина, м | ||||
| АНПА | 24.01.2020 | 61.4330 | 52.2244 | 573 | 61.4280 | 52.2280 | 574 | 33 | 590 |
| Трал Сигсби | 25.01.2020 | 61.4281 | 52.2283 | 550 | 61.4331 | 52.2252 | 551 | 87 | 630 |
Также в процессе выполнения миссий АНПА производились измерения параметров водной среды набором океанологических приборов и датчиков (CTD, CDOM, Хлорофилл-А, датчик мутности).
В данном районе грунт представлял собой промытый щебень и гальку разного размера, в среднем до 1 cм в диаметре.
Биологический анализ фототрансекты, сравнение результатов с траловыми сборами
Для учета фауны на трансекте были отобраны каждая третья фотография таким образом, чтобы избежать перекрытий изображений на фотографиях, но при этом обеспечить максимально непрерывную фототрансекту для исследований. Всего для биологического анализа использованы 334 фотографии. На каждой из них производился подсчет бентосных беспозвоночных животных эпифауны с помощью программы ImageJ.
Организмы определялись до макротаксонов различного систематического ранга, определить до которого было возможно по фотографиям. В ряде макротаксонов удавалось выделить несколько морфологических видов (морфовидов), которые явно отличались от других и были хорошо видны на большинстве снимков. Не исключено, что в некоторых случаях морфологический вид мог состоять из нескольких таксономических видов, которые невозможно было разделить между собой по фотографиям как в силу невысокого разрешения фотографий, так и в силу особенностей систематических признаков, которые не видны на снимках. Вероятно, что общее число видов, присутствующих на фотографиях, во многих макротаксонах выше, чем выделяемое нами число морфологических видов, т.к. в каждой группе имелись животные, которые в силу разных причин (главным образом из-за низкого разрешения кадров) не удавалось достоверно отнести ни к одному морфологическому виду. На основе численностей организмов на фотографиях и данных по площади кадра рассчитывалась плотность отдельных макротаксонов и морфовидов на единицу площади. Кроме того, определялась средняя доля представителей отдельных макротаксонов и морфовидов от общей численности организмов на фототрансекте.
В координатах фототрансекты было проведено траление с помощью трала Сигсби (ст. 6599) (рис. 4, табл. 2). Результаты первичной обработки траловых проб приведены в статье Галкина и др. [6]. Нами было проведено сравнение данных по составу и структуре донных сообществ, полученных при анализе фотографий и траловых уловов. Разборка траловых проб велась по стандартной методике, в соответствии со списком макротаксонов, принятым в практике работы ИО РАН. Сравнение данных по фаунистическому составу сообществ, определенному по фотографиям и тралам, возможно только на уровне макротаксонов одинакового ранга, до которых имеются определения в обоих случаях. После разборки траловых уловов представители каждого макротаксона были подсчитаны и определена их доля в траловом улове. Эти доли сравнивались с долями тех же макротаксонов, вычисленными на основе анализа фототрансекты.
РЕЗУЛЬТАТЫ
Анализ фототрансекты
Нами были выявлены представители 16 макротаксонов бентосных беспозвоночных животных эпифауны: Demospongiae, Hydrozoa, Octocorallia, Actiniaria, Scleractinia, Polychaeta, Cephalopoda, Isopoda, Pycnogonida, Crinoidea, Ophiuroidea, Holothuroidea, Echinoidea, Asteroidea, Bryozoa, Ascidiacea. Шестьдесят морфологических видов было выделено внутри макротаксонов.
Наибольшее разнообразие отмечалось среди губок Demospongiae (12 морфовидов) и кораллов Octocorallia (10 морфовидов) (рис. 5). Значительно меньшее число морфовидов удалось выделить среди морских ежей (4), морских звезд (3), склерактиний (2), асцидий (2), голотурий (1) и головоногих моллюсков (1). Разнообразие мелких организмов, мшанок, брахиопод, изопод, пикногонид, полихет и др. составляло также 1–2 морфовида. Три группы животных на обследуемой трансекте отличались относительно высоким разнообразием и численностью: офиуры, гидрокораллы и актинии. Но выделять отдельные морфологические виды среди них одинаково достоверно на всех кадрах не представлялось возможным отчасти в силу особенностей имеющихся фотографий, обсуждаемых ниже.

Преобладающую долю животных на фотографиях составляли офиуры (85%, 86 ± 38 экз/м2) (табл. 3). Со значительным отрывом от них шли представители класса Hydrozoa (6%, 6 ± ± 4 экз/м2), преимущественно представленные гидрокораллами Stylasteridae. Немного меньшей на фотографиях была доля губок Demospongiae (5%, 5 ± 4 экз/м2). Среди обыкновенных губок выделялось 3 морфовида, несколько превышающие по плотности остальные (~0.5%, ~0.5 экз/м2). Еще один морфовид имел не такую большую плотность (0.2%), но обладал очень крупными размерами и явно играл существенную роль в сообществе. При этом плотность неразделенных до морфовида губок составляла 2 ± 3 экз/м2. Среди относительно многочисленных животных также были представители Ascidiacea (1%, 1 ± 0.7 экз/м2). Доля остальных животных составляла менее 1%. В том числе невелика была относительная доля достаточно разнообразных на трансекте кораллов Octocorallia (0.7%, 0.7 ± 0.5 экз/м2).
Таблица 3.
Доли от общей численности и плотности макротаксонов на фототрансекте и в траловом улове (данные по тралам взяты на основе Галкина и др., [6])
| Таксон | Фототрансекта | Трал | |
|---|---|---|---|
| % | плотность, экз/м2 | % | |
| Demospongiae | 4.77 | 4.87 | 7.52 |
| Hydrozoa | 6.25 | 6.38 | 7.07 |
| Octocorallia | 0.72 | 0.74 | 0.30 |
| Actiniaria | 0.14 | 0.14 | 0.05 |
| Scleractinia | 0.15 | 0.16 | 0 |
| Nemertea | 0 | 0 | 0.35 |
| Sipuncula | 0 | 0 | 0.05 |
| Polychaeta | 0.03 | 0.03 | 2.64 |
| Bivalvia | 0 | 0 | 0.05 |
| Gastropoda | 0 | 0 | 0.25 |
| Cephalopoda | 0.01 | 0.01 | 0.05 |
| Isopoda | 0.01 | 0.01 | 8.46 |
| Amphipoda | 0 | 0 | 15.43 |
| Pycnogonida | 0.05 | 0.05 | 0.20 |
| Bryozoa | 0.05 | 0.05 | 1.69 |
| Brachiopoda | 0 | 0 | 0.10 |
| Crinoidea | 0.30 | 0.30 | 1.79 |
| Ophiuroidea | 84.71 | 86.42 | 50.17 |
| Holothuroidea | 0.82 | 0.83 | 1.14 |
| Echinoidea | 0.38 | 0.39 | 0.70 |
| Asteroidea | 0.27 | 0.28 | 0.65 |
| Ascidiacea | 1.06 | 1.08 | 0.30 |
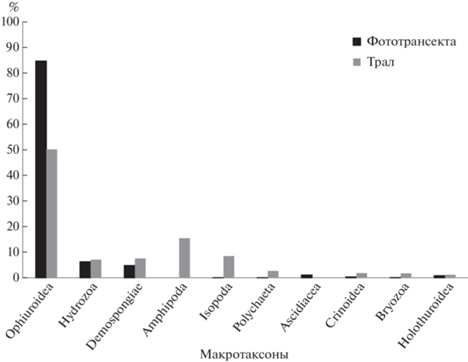
Сравнение данных фотоанализа и тралового улова
Все макротаксоны, встреченные на фотографиях, были собраны также и в траловых сборах, за исключением склерактиний [6]. Группы, присутствующие только в трале, – это или представители инфауны (сипункулиды и двустворчатые моллюски), или в большинстве своем мелкие организмы, плохо заметные на фотографиях (гастроподы и амфиподы).
Офиуры были выявлены в качестве доминантной группы как при анализе фотографий, так и в траловых сборах, при этом их относительная доля была существенно ниже в траловых сборах, чем на фотографиях (50 и 85% соответственно) (рис. 6, табл. 3). В траловых сборах была значительно выше доля амфипод, изопод, полихет и мшанок, чем на фотографиях. Гидроидные и обыкновенные губки были представлены в примерно одинаковых долях в обоих методах исследования.
ОБСУЖДЕНИЕ
Особенности изучения донных сообществ с использованием АНПА “ММТ-3000”
Метод изучения донных сообществ по подводным фотографиям и видеозаписям, полученным подводными аппаратами, получает все большее распространения в последние десятилетия. Среди явных преимуществ данного метода можно назвать возможность относительно точно описывать количественное распределение как многочисленных, так и малочисленных сравнительно крупных представителей эпифауны, хорошо заметных на фотографиях на мягких или мелкогалечных грунтах, в том числе проводить изучение мелкомасштабного распределения животных. Однако данный метод имеет ряд недостатков, связанных, прежде всего, со сложностью таксономического определения видов по фотографиям. Огромное влияние на возможность проведения биологических работ по фотоматериалам оказывают технические характеристики подводных аппаратов и использующихся в них камер [10].
Проведенный нами биологический анализ фотографий, полученных с использованием АНПА “ММТ-3000”, позволил оценить данный аппарат для проведения экологических исследований по изучению состава и структуры донных сообществ.
Высота аппарата над грунтом на протяжении всего фотопрофилирования сохранялась постоянной (~1.5 м). Соответственно, площадь кадров во всех случаях была примерно одинаковой (1 м2), что позволяло провести учет фауны с приблизительно одинаковой точностью на всем протяжении трансекты. Камера была направлена под углом 90° к грунту, что позволяло сохранить равный масштаб в пределах кадра. Аппарат двигался с постоянной небольшой скоростью над дном, что позволяло снимать кадры с перекрытием. Для задач, связанных с общим описанием состава и структуры сообществ, кадры с перекрытием не требуются. Поэтому нами были обследованы не все фотографии, а только каждая третья, выбранные таким образом, чтобы избежать перекрытий изображений. Однако фотопрофилирование с перекрытием может быть необходимо при проведении работ по точному учету отдельных видов животных.
Одним из важных преимуществ использования АНПА было то, что для каждого кадра автоматически вычислялась площадь с помощью определенных алгоритмов, изложенных в главе МАТЕРИАЛ И МЕТОДЫ. Это позволило провести количественные исследования сообществ и определить плотности морфовидов или макротаксонов на единицу площади. Кроме того, каждый кадр имел масштабную линейку, с помощью которой также было возможно определить площадь кадра или же оценить линейные размеры организмов, проективное покрытие их на дно, площадь скоплений организмов и т.п. Для каждого кадра определялись географические координаты и глубина, на которой он был сделан. Имея привязку к координатам, в дальнейшем для определенных задач возможно будет проводить работы по картированию распределения тех или иных видов или сообществ. При работе с фотографиями АНПА стоит особенно отметить удобный интерфейс фотографий, при котором вся привязанная к кадру информация (глубина, высота над грунтом, площадь кадра, координаты и др.) наносилась поверх него, что значительно упрощало работу.
Еще одним преимуществом фотографий, сделанных АНПА, было то, что все они были равномерно освещены и на них отсутствовали темные пятна в углах снимка, что позволяло одинаково точно определять и подсчитывать животных на всем кадре.
Основная сложность в обработке фотографий на трансекте, сделанной АНПА, состояла в невысоком разрешении фотографий и в их пересвеченности. Это заметно сказывалось как на возможности определить организмы по фотографиям, рассмотрев в некоторых группах отдельные таксономические признаки, так и на возможности выделить отдельные морфовиды во многих группах животных с одинаковой точностью на всех фотографиях. При имеющемся разрешении достоверно животные определялись только до уровня макротаксонов. В ряде макротаксонов выделялось несколько явно отличимых морфовидов, которые были заметны на всех фотографиях. Лучше всего разделению на морфовиды поддавались губки Demospongiae и кораллы Octocorallia, имеющие крупные размеры и характерный вид. Среди них нами было отмечено наибольшее разнообразие. Напротив, среди обильных на трансекте офиур и гидрокораллов выделять отдельные морфологические виды одинаково достоверно на всех кадрах не представлялось возможным в условиях высокой плотности и агрегированного распределения животных при низком разрешении и чрезмерной пересвеченности кадров. Большинство офиур и гидрокораллов по фотографиям плохо поддаются определению, однако визуально их разнообразие на трансекте АНПА было относительно высоким. Небольшое число морфовидов (1) удалось выделить и среди актиний, не отличающихся высокой плотностью на трансекте в связи с низким разрешением фотографий. Крупные регулярно встречающиеся на трансекте голотурии были представлены только семейством Psolidae (1 морфовид), но определить их видовую принадлежность по фотографиям не представлялось возможным в силу особенностей систематических признаков голотурий, не различимых на фотографиях.
Oтмеченная существенная разница в числе морфовидов в ряде макротаксонов, вероятно, отчасти отражает существующие тенденции видового разнообразия, несмотря на то, что во всех макротаксонах число видов, скорее всего, выше, чем число выделенных морфовидов. В связи с тем, что в координатах фототрансекты было проведено траление, в дальнейшем после определения тралового материала часть морфовидов на фотографиях возможно будет сопоставить с видами в трале и значительно верифицировать определения на фотографиях.
Несмотря на низкое разрешение и пересвеченность кадров было возможно провести количественный учет большинства крупных организмов эпифауны. В данном районе грунт был представлен промытым щебнем и галькой. На таком грунте из эпифауны представлены были в основном крупные животные (офиуры, губки, асцидии, кораллы и др.), легко поддающиеся учету. Некоторые сложности возникали с подсчетом гидрокораллов, у которых не всегда было возможно распознавать границы колонии и определить – живая колония или нет, а также с подсчетом офиур в тех случаях, где они образовывали плотные трехмерные поселения на крупных губках или камнях. Мелкие организмы и/или сильно подвижные животные (мшанки, брахиоподы, изоподы, пикногониды, некоторые полихеты и др.) как в целом в силу применяемого метода учета по фотографиям, так и в силу низкого разрешения данных кадров, вероятнее всего, были значительно недоучтены как качественно, так и количественно. В целом, проведенный учет, вероятно, отражает существующие особенности количественного распределения бентоса.
Из вышесказанного можно предположить, что улучшенная цифровая оптическая фотосистема с большим разрешением, реализованная в новом АНПА “ММТ-3500” (см. ниже), значительно расширит возможности для биологического анализа донных сообществ по фотографиям. Главным образом, возможно будет значительно улучшить степень определения фауны по фотографиям, а также увеличить точность количественного учета, в том числе для более мелких организмов.
Сравнение данных фотоанализа и тралового улова
Данные анализа фотографий и тралового улова в настоящий момент возможно сравнивать только на уровне макротаксонов, ввиду отсутствия на сегодня определений животных из тралов до низкого таксономического уровня и, соответственно, невозможности соотнесения собранных видов с теми морфовидами, которые выделены на фотографиях. В целом, данные по донным сообществам, полученные обоими методами, хорошо соотносятся друг с другом на уровне макротаксонов. Отличия в основном связаны с тем, что в траловые сборы попадали, в том числе, животные инфауны, а также мелкие и подвижные организмы, не видные или плохо различимые на фотографиях. Таким образом, для оценки количественных соотношений животных в данном сообществе с относительно невысокой плотностью эпифауны (102 экз/м2) на субстрате, представленном промытым щебнем и галькой разного размера, пригодны как метод траления, так и метод анализа фотографий. При этом совместное использование обоих методов значительно увеличивает объективность данных, т.к. метод траления позволяет проводить более точные определения фауны и собирать большее количество жизненных форм животных, а метод анализа фотографий позволяет для ряда видов более точно описывать количественные характеристики распределения с определением плотности видов на единицу площади. Для получения более точных сравнений и оценки обоих методов необходимы видовые определения тралового улова.
По нашим данным, существует небольшое количество работ по сравнению данных по бентосным сообществам, полученным в пределах одного района с помощью траловых уловов и анализа фотографий. При этом некоторые работы ограничиваются сравнением данных только по придонным рыбам [13, 16, 21] или по отдельным группам крупных, хорошо заметных ракообразных [22]. Сравнение тралового улова и данных, полученных глубоководным обитаемым аппаратом (ГОА), было проведено в абиссали Канарской котловины (5350–5460 м) [7]. Показано, что трал и аппарат дополняют друг друга в плане описания видового состава фауны (сходство траловой пробы с набором видов, отмеченных ГОА, было <30%). Кроме того, выявлены на порядок различающиеся данные, полученные ГОА и тралом, по распределению Komokiacea на морском дне [7]. Предположено, что значительно заниженные плотности животных мегафауны, выявляемые по траловым уловам на вязких грунтах, могут быть связаны с быстрым забиванием тралового мешка и с систематической ошибкой при вычислении пути, пройденного тралом по дну. Схожее сравнение данных по бентосным сообществам на основе траловых сборов и фотографий было выполнено в Центральной Арктике [20]. По аналогии с Канарской котловиной и в отличие от настоящей работы, в Арктике данные по тралам и фотографиям отличались весьма существенно как по таксономическому составу, так и по количественным характеристикам. В частности, на мягком илистом грунте на глубинах 3500–4300м в условиях частичного ледового покрова и общей крайне низкой плотности фауны (0.6 экз/м2), тралы приносили существенно меньшую долю иглокожих и актиний, чем было зарегистрировано по фотографиям. Недооцененными по траловым сборам оказывались и некоторые виды подвижных ракообразных (изопод и амфипод) и плавающих полихет Macellicephalinae, хорошо заметные на фотографиях и, по-видимому, избегающие тралов и/или не сохраняющиеся в тралах при подъеме. В свою очередь мелкие прикрепленные формы (гидроиды, мшанки и губки), заселяющие небольшие камни или остатки стволов стеклянных губок, были недооценены по разнообразию и количеству на основе фотографий.
Таким образом, литературные данные свидетельствуют о том, что на абиссальных равнинах со спокойным рельефом и илистым грунтом тралы и фотографии дополняют друг друга. Траловые пробы расширяют представление о видовом составе фауны, но не могут быть использованы для количественных оценок ни в отношении мелких форм, ни в отношении мегафауны. В условиях пересеченного рельефа и преобладания твердого субстрата, когда траления затруднены и не дают репрезентативных проб, фото- и видеоанализ, а также прямые наблюдения остаются основными методами исследований донных сообществ [7]. В то же время предварительные данные настоящего исследования показывают, что на батиальных глубинах на сыпучих грунтах данные траловых уловов и фотографий несколько лучше соотносятся друг с другом, чем для абиссальных глубин на илистых грунтах. При этом как и на илистых грунтах, траловые уловы расширяют данные по видовому составу и остаются незаменимыми для сбора “ваучерных” видов, необходимых для определения видов по фотографиям.
Совершенствование АНПА
Одной из важнейших задач при фотосъемке дна с использованием АНПА является обеспечение его стабильной и безопасной работы. Съемка проводится на малой высоте (около 1 м над грунтом) при движении АНПА с малой скоростью, поэтому придонные течения могут существенно влиять на траекторию движения аппарата, а также возникает опасность столкновения с подводными объектами или донной поверхностью, имеющей сложный рельеф. Такие условия работы предъявляют повышенные требования к системам очувствления и управления АНПА. При этом операторы АНПА должны заранее планировать миссию с учетом предполагаемого характера грунта и наличия придонных течений в районе работ, имея уверенную акустическую связь с аппаратом с возможностью внесения корректировок в миссию “на ходу”. Приобретенный в экспедиции опыт показал необходимость модернизации подводного робототехнического комплекса в части разработки и изготовления нового АНПА “ММТ-3500” с целью повышения эффективности выполнения визуальной оценки глубоководных биологических ресурсов Южных морей. АНПА “ММТ-3500” имеет следующие улучшенные (по сравнению АНПА “ММТ-3000”) функциональные возможности.
Рабочая глубина погружения АНПА увеличена до 3500 м, при этом предельная выдерживаемая глубина составляет 4200 м. Модернизированная антенна ГАНС УКБ обеспечивает максимальную дальность навигации и связи и по гидроакустическому каналу до 6000 м благодаря использованию системы S2C R 15/27 USBL, не требующей калибровки перед каждым использованием, поскольку эта антенна размещена не на судне, а на борту АНПА. Также АНПА “ММТ-3500” оснащен новыми модулями широкополосной радиосвязи 3D Link, что позволяет при нахождении аппарата на поверхности воды осуществлять управление АНПА и передачу данных по радиосвязи на расстоянии до 10 км.
Для работы АНПА подо льдом были установлены дополнительные эхолоты, направленные вертикально вверх и под углом 45° к нижней кромке ледового покрытия, а также предусмотрен режим автоматического возвращения АНПА к судну-носителю после завершения миссии. Помимо этого, улучшена возможность обхода аппаратом препятствий по курсу движения благодаря двум дополнительным эхолотам, расположенным в горизонтальной плоскости АНПА и направленным под углом 45° к его продольной оси.
Для повышения живучести АНПА в случае потери плавучести (повреждение синтактика, попадание ила в аппарат и др.) масса аварийного балласта увеличена в 2 раза и составляет 10 кг. В случае аварийного всплытия АНПА на поверхность установленная система спутниковой связи Iridium обеспечит определение координат аппарата в любой точке мира.
Чтобы повысить качество выполнения экологических исследований с помощью АНПА “ММТ-3500”, были улучшены характеристики цифровой оптической фотосистемы благодаря использованию полнокадровой промышленной фотокамеры Vieworks VH-11MG2-C6 с объективом Sigma AF 14mm F1,8 DG HSM Art. Площадь кадра увеличена в 4 раза (при съемке с высоты 1 м над дном размеры кадра увеличатся с 0.75 × 0.58 м до 1.61 × 1.18 м), разрешение кадра – до 4008 × × 2672 (11 Мп). Кроме того, установлен новый ГБО производства ИПМТ ДВО РАН с увеличенной полосой обзора до 150 м на борт, а также многолучевой эхолот R2 Sonic 2020 с функцией определения объектов в толще воды, что позволяет получить объемную картину распределения скоплений криля. Максимальная наклонная дальность работы эхолота – 200 м. Для повышения точности измерения параметров водной среды АНПА “ММТ-3500” оснащен логгером Idronaut OS310 с датчиками температуры, давления, электропроводности, pH, растворенного кислорода, мутности, флюоресценции хлорофилла-А, фотосинтетически активной радиации (ФАР) и скорости звука.
На АНПА “ММТ-3500” планируется отладка работы системы интеллектуальной поддержки деятельности операторов, которая на основе анализа данных, получаемых от подсистем аппарата и судового оборудования, будет наглядно отображать взаиморасположение судна и АНПА с помощью графического интерфейса, а также формировать предупреждения и рекомендации для оператора аппарата и экипажа обеспечивающего судна. Использование предложенной системы позволит добиться значительного улучшения качества выполнения АНПА осмотровых миссий и обеспечит безопасную работу аппарата.
Благодарности. Авторы выражают признательность капитану и экипажу 79 рейса НИС “Академик Мстислав Келдыш”, а также пилотам и техникам АНПА “ММТ-3000” за высокопрофессиональную работу.
Источники финансирования. Доработка программно-аппаратной части АНПА “ММТ-3000” и экспедиционное применение аппарата выполнены Боровиком А.И., Михайловым Д.Н. и Коноплиным А.Ю. в рамках госзадания ИПМТ ДВО РАН (тема № FWFG-2022-0003). Траловые работы в рейсе, обработка траловой пробы, обработка фотографий и анализ биологического материала выполнены Е.И. Рыбаковой и С.В. Галкиным в рамках госзадания ИО РАН (тема № FMWE-2022-0001).
Список литературы
Бабаев Р.А., Боловин Д.А., Борейко А.А. и др. Технология использования АНПА для исследования глубоководных экосистем Атлантического сектора Антарктики // Подводные исследования и робототехника. 2020. №2 (32). С. 13–21.
Багницкий А.В., Инзарцев А.В. Автоматизация подготовки миссии для автономного необитаемого подводного аппарата в задачах обследования акваторий // Подводные исследования и робототехника. 2010. № 2(10). С. 17–24.
Боженов Ю.А. Использование автономных необитаемых подводных аппаратов для исследования Арктики и Антарктики // Фундаментальная и прикладная гидрофизика. 2011. Т. 4. № 1. С. 47–68.
Ваулин Ю.В., Дубровин Ф.С., Щербатюк А.Ф. Интегрированная система навигации и связи АНПА “ММТ-3000” и опыт ее использования в работах на глубоководных протяженных трассах // Подводные исследования и робототехника. 2017. № 2(24). С. 14–19.
Галкин С.В., Виноградов Г.М. Видим дно! // Природа. 2019. № 6. С. 16–22.
Галкин С.В., Минин К.В., Удалов А.А. и др. Донные сообщества бассейна Пауэлла // Океанология. 2021. Т. 61. № 2. С. 233–249.
Галкин С.В., Москалев Л.И. Изучение абиссальной фауны северной Атлантики с помощью глубоководных обитаемых аппаратов // Океанология. 1990. Т. 30. № 4. С. 682–689.
Горнак В.Е., Икзарцев А.В., Львов О.Ю. и др. ММТ-3000 – новый малогабаритный автономный необитаемый подводный аппарат Института проблем морских технологий ДВО РАН // Подводные исследования и робототехника. 2007. № 1 (3). С. 12–20.
Коноплин А.Ю., Денисов В.А., Даутова Т.Н. и др. Технология использования ТНПА для комплексного исследования глубоководных экосистем // Подводные исследования и робототехника. 2019. №4 (30). С. 4–12.
Мокиевский В.О. Подводная видеосъемка как метод количественного изучения бентоса // Современные методы и средства океанологических исследований: Сб. ст. XIV международной научно-технической конференции “Современные методы и средства океанологических исследований (МСОИ 2015)”. 2015. Т. 2. С. 311–315.
Поярков С.Г., Римский-Корсаков Н.А., Флинт М.В. Технические аспекты исследований окружающей среды западной части Карского моря // Океанологические исследования. 2017. Т. 45. №. 1. С. 171–186.
Филаретов В.Ф., Коноплин А.Ю., Коноплин Н.Ю. Разработка и натурные испытания системы интеллектуальной поддержки деятельности операторов ТНПА // Подводные исследования и робототехника. 2018. № 2 (26). С. 12–20.
Adams P.B., Butler J.L., Baxter C.H. et al. Population estimates of Pacific coast ground fishes // Fishery Bulletin. 1995. V. 93. P. 446–455.
Dowdeswell J.A., Evans J., Mugford R. et al. Autonomous underwater Vvhicles and investigations of the ice-ocean interface in Antarctic and Arctic waters // Journal of Glaciology. 2003. V. 54. № 187. P. 661−672.
Inzartsev A.V., Kamornyi A.V., Kiselev L.V. et al. The integrated navigation system of an autonomous underwater vehicle and the experience from its application in high Arctic latitudes // Gyroscopy and Navigation. 2010. V. 1. P. 107–112.
McIntyre F.D., Neat F., Collie N. et al. Visual surveys can reveal rather different 'pictures' of fish densities: Comparison of trawl and video camera surveys in the Rockall Bank, NE Atlantic Ocean // Deep-Sea Research I. 2015. V. 95. P. 67–74.
McPhail S. AUTOSUB Operations in the Arctic and the Antarctic // Proc. Intern. Sci. Workshop 11–13 April 2007. SUT. P. 28–39.
Quan X., Fry E.S. Empirical equation for the index of refraction of seawater // Applied optics. 1995. V. 34. № 18. P. 3477–3480.
Rybakova (Goroslavskaya) E., Galkin S., Bergmann M. et al. Density and distribution of megafauna at the Haakon Mosby mud volcano (the Barents Sea) based on image analysis // Biogeosciences. 2013. V. 10. P. 3359–3374. https://doi.org/10.5194/bg-10-3359-2013
Rybakova E., Kremenetskaia A, Vedenin A. et al. Deep-sea megabenthos communities of the Eurasian Central Arctic are influenced by ice-cover and sea-ice algal falls // PLoS ONE. 2019. V. 14(7): e0211009. https://doi.org/10.1371/journal.pone.0211009
Trenkel V.M., Lorance P., Mahevas S. Do visual transects provide true population density estimates for deep water fish? // ICES Journal of Marine Science. 2004. V. 61. P. 1050–1056. https://doi.org/10.1016/j.icesjms.2004.06.002
Uzmann J.R., Cooper R.A., Theroux R.B., Wigley R.L. Synoptic comparison of three sampling techniques for estimating abundance and distribution of selected megafauna: submersible VS camera sled VS otter trawl // Marine Fisheries Review. 1977. V. 39. P. 11–19.
Yoerger D.R., Bradley A., Jakuba M. et al. Autonomous and remotely operated vehicle technology for hydrothermal vent discovery, exploration, and sampling // Oceanography. 2007. V. 20. № 1. P. 152–161.
Дополнительные материалы отсутствуют.