

Океанология, 2023, T. 63, № 5, стр. 840-852
Особенности исследования биологических и техногенных объектов с использованием глубоководных буксируемых аппаратов
И. М. Анисимов 1, *, А. К. Залота 1, А. В. Лесин 1, В. О. Муравья 1
1 Институт океанологии им. П.П. Ширшова РАН
Москва, Россия
* E-mail: anisimov.im@ocean.ru
Поступила в редакцию 22.05.2023
После доработки 27.05.2023
Принята к публикации 06.06.2023
- EDN: XUZQGK
- DOI: 10.31857/S0030157423050027
Аннотация
Применение буксируемых необитаемых подводных аппаратов (БНПА), оснащенных фото-, видео- и гидролокационными системами, доказало свою эффективность в наблюдении поверхности дна в рамках комплексных исследований Мирового океана. В круг задач, решаемых с помощью аппаратов этого класса, входят биологические исследования донной фауны, а также исследования подводных объектов техногенного происхождения. БНПА “Видеомодуль”, разработанный в Институте океанологии им. П.П. Ширшова, на протяжении нескольких лет используется для решения этих задач. В настоящей статье анализируется технология океанологических исследований с использованием данного БНПА.
ВВЕДЕНИЕ
На протяжении последних 15 лет Институт океанологии им. П.П. Ширшова интенсифицировал комплексные морские экспедиционные исследования региональных экосистем Российской Арктики [13, 14, 16, 17]. Неотъемлемой частью этих работ является изучение донной макрофауны, ее структурных особенностей и временнóй динамики. В отличие от наземных биотопов, анализ донных сообществ затруднен за счет больших глубин и физико-географических факторов, как например низкие температуры в высоких широтах. В то время когда в наземных условиях исследователь может детально описать топографию, геологические свойства района и сопоставить распределение организмов в пространстве относительно этих данных, это крайне сложно осуществить для водных биотопов. Классические методы отбора биологических проб (дночерпатель, донные тралы и т.д.) имеют малую эффективность в выявлении мозаичности и масштабном синтезе распределения организмов относительно донной топографии.
Восполнить этот пробел и соотнести количественные и качественные биологические данные с физико-географическими особенностями изучаемого района в той или иной мере позволяет использование разнообразных подводных аппаратов, оснащенных системами фото- и видеонаблюдения, а также гидролокаторами. Современное состояние технологий светочувствительных элементов, интегральных микросхем и систем передачи данных позволяет получать изображения высокого качества. Малые размеры современной фото-, видео- и вычислительной аппаратуры позволяют оснастить ей аппараты любого класса и габаритов. В мировой практике для исследований донных сообществ широко применяются телеуправляемые, буксируемые и автономные необитаемые подводные аппараты (ТНПА, БНПА и АНПА) [21, 22], а в ряде случаев и обитаемые подводные аппараты (ОПА). Наиболее удобными для определения, измерения и подсчета плотности большого количества мега- и макрофауны обитающей на поверхности дна, являются буксируемые аппараты, благодаря их стабильному движению, а также возможности наблюдений и многопараметрической съемки поверхности дна на протяженных маршрутах с передачей данных в реальном времени [19].
Особенности экологических исследований в Карском арктическом регионе связаны с присутствием на дне захоронений радиоактивных отходов (РАО) [10]. Помимо задач изучения донных сообществ, существенной частью работ в каждой комплексной экспедиции является анализ состояния окружающей среды в местах затопления ядерных и радиационно-опасных объектов (ЯРОО) и захоронений РАО, а также контроль состояния защитных барьеров (оболочек) ЯРОО. Эти исследования включают поиск и уточнение местоположения объектов, а также целенаправленный осмотр их конструкций на предмет коррозии и механических повреждений, а также измерение радиоактивности на их поверхности и на дне окружающей акватории [13].
Обе обозначенные задачи – исследования донной макрофауны и захоронений РАО – могут быть эффективно решены с помощью буксируемых аппаратов. Начиная с 2015 г. в арктических экспедициях Института океанологии РАН применяется БНПА “Видеомодуль”, разработанный в лаборатории гидролокации дна ИО РАН [11]. Изначально комплекс БНПА включал одну телевизионную камеру с заливающими источниками света (ИЗС). В процессе ежегодных исследований, от экспедиции к экспедиции, БНПА совершенствовался в соответствии с новыми требованиями, предъявляемыми научной проблематикой. На БНПА устанавливали новые приборы и устройства сбора информации об окружающей среде, повышали их разрешающую способность, расширяли возможности системы передачи информации, модифицировали существующие узлы. В настоящий момент БНПА “Видеомодуль” представляет собой комплексную систему визуального наблюдения с возможностью получения в реальном времени гидролокационных изображений, фото- и видеозаписей, синхронизированных между собой. В данной работе рассматриваются технические особенности БНПА “Видеомодуль” и методика его эксплуатации для решения двух задач: исследования морского дна, макрофауны и обследования захоронений РАО.
ПРИБОРЫ И МЕТОДЫ ИССЛЕДОВАНИЙ
БНПА “Видеомодуль” состоит из подводного и надводного блока. В состав надводного блока входит электронно-вычислительная машина (ЭВМ), установленная на судне-носителе и оптический модем для связи с аппаратом. Подводный блок представляет собой раму из нержавеющей стали с закрепленными на ней прочными герметичными корпусами из нержавеющей стали и титанового сплава, содержащими различные устройства, а именно: электронную систему управления, блок электропитания, подводные источники заливающего и импульсного света, блок датчиков ориентации в пространстве (инклинометр, альтиметр, глубомер), фото- и видеокамеры, а также и гидролокатор бокового обзора (ГБО) высокого разрешения. Аппарат рассчитан для работы на глубине до 6000 м. Схема аппарата представлена на рис. 1. Буксировка БНПА “Видеомодуль” осуществляется с судна-носителя, оборудованного лебедкой и спуско-подъемным устройством в виде П-рамы или А-рамы. Усиленная рамная конструкция аппарата с 12 тридцатикилограммовыми балластными грузами обеспечивает малый угол отклонения кабель-троса от вертикали при буксировке аппарата, что позволяет оперативно регулировать высоту аппарата над грунтом при благоприятных погодных условиях. В задней части аппарата по обоим бортам расположены стабилизаторы из алюминиевых композитных панелей, которые обеспечивают курсовую устойчивость. Скорость буксировки поддерживается вблизи значения 0.5 узла.
Рис. 1.
БНПА “Видеомодуль”, схематическое изображение с указанием основных систем в составе аппарата.
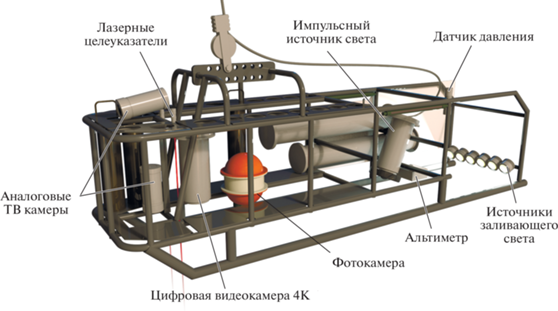
Система наблюдения поверхности дна БНПА “Видеомодуль” включает фотосистему, собранную на базе фотокамеры высокого разрешения SONY ILCE 7RM2 и импульсного источника освещения GODOX AD200 [3]. Фотокамера оснащена светочувствительным объективом Sony FE F2 с фиксированным фокусным расстоянием, составляющим 28 мм. Разрешение фотокамеры составляет 42.4 мегапикселя. При высоте буксировки в 1–1.5 м полученные фотоснимки позволяют различить объекты, линейные размеры которых составляют несколько миллиметров. В качестве основной видеокамеры используется цифровая IP камера высокого разрешения Beward 3670M с разрешением 6 мегапикселей. Видеокамера позволяет получать видеоизображение в реальном времени, а также осуществлять запись на внутреннюю карту памяти. Камера оснащена объективом BH03611AIR с фокусным расстоянием 3.6 мм. При высоте буксировки 1–1.5 м видеоизображения позволяют различить объекты величиной порядка сантиметра и более. Аналоговые видеокамеры PAL EC-007A, направленные вниз и вперед под углом, используются в качестве операторских камер для контроля высоты буксировки аппарата и предотвращения столкновения с дном и подводными объектами впереди по курсу движения БНПА. В качестве ИЗС используются матричные диоды Epistar XY-J45 мощностью 30 Вт каждый, в количестве 6 штук, заключенные в герметичные корпуса с иллюминаторами из оргстекла. Светильники расположены в задней части аппарата с целью максимального удаления от видеокамер, что позволяет снизить влияние помехи обратного рассеяния от взвеси в толще воды [1]. Система масштабирования выполнена на базе двух параллельно направленных лазерных источников M650-5I (US Lasers Inc.). Благодаря такому расположению в кадре всегда присутствуют два лазерных пятна, расстояние между которыми остается равным 20 см, вне зависимости от высоты аппарата над грунтом, что позволяет масштабировать полученные изображения.
Помимо системы визуального наблюдения, БНПА “Видеомодуль” оснащен гидролокатором бокового обзора (ГБО) для регистрации мезомасштабных элементов донного рельефа и подводных объектов. ГБО является разработкой Лаборатории гидролокации дна ИО РАН [12]. Рабочая частота ГБО составляет 240 кГц, а излучаемый сигнал представляет собой посылку с линейной частотной модуляцией несущей частоты (ЛЧМ). Корреляционная обработка эхо-сигналов позволяет получать детализированные акустические изображения рельефа дна и подводных объектов с разрешением в несколько сантиметров. При этом дальность действия гидролокатора составляет 150 м на борт.
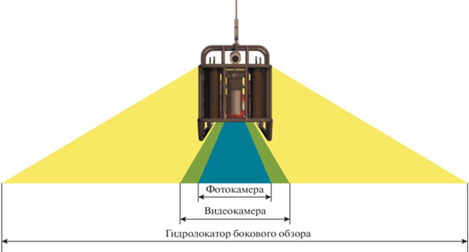
Все системы работают синхронно и передают данные на судовую ЭВМ в реальном времени. На рис. 2 приведено схематическое изображение дальности действия систем БНПА. Такая конфигурация позволяет получать комплексное представление о микро- и мезомасштабных элементах рельефа дна и подводных объектах природного и техногенного происхождения.
Рис. 2.
Схема дальности действия систем визуального наблюдения и гидролокатора бокового обзора БНПА “Видеомодуль”.
Система позиционирования аппарата состоит из альтиметра, датчика давления (глубомера) и инклинометра. Альтиметр выполнен на базе шлюпочного эхолота Mark-4 фирмы Lowrance Inc. (США) и глубоководной акустической антенны с рабочей частотой 83 кГц, разработанной в ИО РАН. Максимальный диапазон альтиметра составляет порядка 300 м, точность – 0.1 м. Глубомер, выполненный на базе датчика давления фирмы Honeywell Inc. (Англия), позволяет измерять текущую глубину погружения БНПА с точностью до 1 м. Для определения угла наклона аппарата относительно горизонта и истинного курса на аппарате установлен трехосевой инклинометр DCM260B. Все данные о состоянии аппарата передаются в реальном времени по оптоволоконной линии связи на судовой пульт управления и обеспечивают безопасное погружение и буксировку аппарата над грунтом.
Для определения географического положения аппарата используется приемник данных космической навигационной системы (КНС) GPS и ГЛОНАСС “Sigma” (Javad Inc.). Приемная антенна расположена в кормовой части судна, вблизи точки схода буксирного кабель-троса БНПА с кормового рола. Положение аппарата считается условно совпадающим с положением приемной антенны КНС, т.к. угол отклонения кабель-троса от вертикали в точке схода не превышает 2°–3° благодаря низкой скорости буксировки и существенному веса аппарата в воде. Более сильные отклонения кабель-троса наблюдаются редко, в случае сильных подводных течений и ветрового волнения. Смещение местоположения аппарата от точки подвеса зависит от глубины аппарата и приблизительно может быть рассчитано по формуле
Данные судового эхолота также используются для работы с БНПА. Поскольку антенна судового эхолота расположена в носовой части судна впереди БНПА на расстоянии, равном длине корпуса судна, изображение эхолотного профиля позволяет заранее регистрировать объекты впереди по маршруту следования БНПА и заранее принимать меры для безопасного обхода препятствия.
Для обеспечения информационной и механической связи БНПА “Видеомодуль” в процессе буксировки с судовой частью комплекса используется кабель-трос КГ1х3Е-70-60-3.
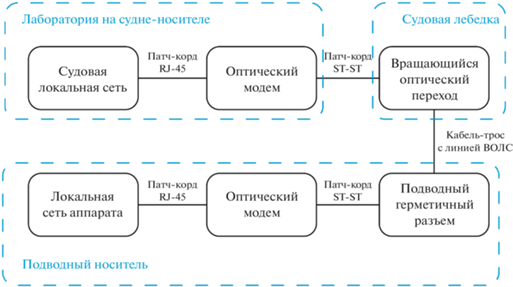
Кабель-трос КГ1х3Е-70-60-3 имеет три внешних грузонесущих повива стальных проволок с полиэтиленовым сердечником, внутри которого протянута трубка из нержавеющей стали, содержащая три отдельных жилы волоконно-оптической линии связи (ВОЛС). Для передачи информации используется одна из жил, а остальные 2 резервируются на случай выхода из строя основной жилы. Функциональная схема системы передачи данных БНПА “Видеомодуль” представлена на рис. 3. Оптические соединения реализованы на стандартных соединительных шнурах ST-ST с байонетным соединением. Аппарат также имеет резервный интерфейс RS-232, для подключения дополнительного оборудования: CTD-зонд, гамма-спектрометр и т.д. [11]
Рис. 3.
Блок-схема системы передачи данных БНПА “Видеомодуль”. Рамками с пунктирными линиями обозначены функциональные блоки, содержащие оборудование для обеспечения работы линии связи.
Электропитание БНПА “Видеомодуль” реализовано с помощью двух сборок гелевых свинцово-кислотных АКБ суммарной емкостью 100 А ч, что обеспечивает до 5 часов непрерывной работы аппарата. Недостатком такого решения является, прежде всего, ограничение времени работы аппарата за бортом, однако современные АКБ позволяют обеспечить продолжительность работы, вполне достаточную для выполнения всех необходимых исследовательских задач [9]. Потребляемая мощность аппарата при полной нагрузке составляет порядка 250 Вт.
БИОЛОГИЧЕСКИЕ ИССЛЕДОВАНИЯ
При проведении биологических, геоморфологических и литологических исследований в шельфовой прибрежной зоне на глубинах до 40 м используются классические методы отбора проб грунта и бентоса, а также применяется труд водолазов. На бо́льших глубинах отбор количественных проб производится дночерпателями, бокскорерами, трубками Неймисто и т.д. Эти орудия лова ограничены небольшой площадью покрытия и малой уловистостью подвижных форм. Относительно количественные сборы материала возможны при помощи разнообразных моделей тралов. Однако остается проблематичным точный подсчет пройденной территории и уверенности в уловистости таких орудий. Все эти классические методы отбора проб имеют малую силу в выявлении мозаичности и масштабном синтезе распределения организмов относительно донной топографии [20]. Использование разнообразных подводных аппаратов позволяет в той или иной мере восполнить этот пробел и соотнести количественные и качественные биологические данные с физико-географическими особенностями изучаемого района.
Использование для этих целей телеуправляемых необитаемых подводных аппаратов, оснащенных движителями (например, ТНПА “ГНОМ” [6]), позволяет осмотреть и изучить труднодоступные районы: отвесные скальные стены, затонувшие объекты и подводные расщелины. Однако пересчет плотности популяции отдельных видов затруднен ввиду нестабильного движения относительно легких аппаратов, испуга подвижных форм от близкого нахождения аппарата и возмущений воды, создаваемой двигателями. Тяжелые буксируемые аппараты имеют преимущество в работах на более пологих рельефах. Отсутствие двигателей и подвижных механизмов исключают отпугивание живых организмов за счет звука и водных пертурбаций. При достаточно высоком нахождении БНПА над дном, волна, создаваемая аппаратом за счет движения, мало ощутима для донных организмов. Такие аппараты способны вести съемку дна на протяженных маршрутах, которые позволяют определить, измерить и посчитать плотность большого количества мега- и макрофауны, обитающей на поверхности дна.
Во время прохождения маршрута (трансекты) для регистрации морских организмов, аппарат удерживается примерно в 1.5 м над дном. При изменении рельефа (глубины места), его расстояние корректируется оператором для создания наиболее последовательной и систематизированной процедуры съемки. Таким образом достигается наиболее возможная стандартизация параметров осмотра дна – на всей протяженности маршрута видны и определяемы организмы определенных размеров и осматривается стабильная площадь дна. Процесс съемки усложняется изменением прозрачности воды (изменение видимости), волновой качкой (резкое поднятие и опускание аппарата над дном), подводными течениями и неровным ходом судна (отклонение аппарата от маршрута и ускорение/замедление движения). Низкая прозрачность воды может сильно увеличить минимальный размер определяемых на видео организмов, что учитывается при анализе материала. Качка аппарата над дном сильно затрудняет расчет площади осмотренного дна и достоверность определения видов. При поднятии видны только крупные формы на большом участке дна, а при опускании аппарату требуется время для фокусирования. При удачной фокусировке виден малый участок ранее заснятого дна (при поднятии) с возможностью определения малых форм биоты. Такие видеонаблюдения чаще всего невозможно использовать для количественного анализа, но они применимы для качественного, первичного осмотра дна. Боковое смещение аппарата за счет подводных течений и нестабильного хода судна могут привести к потере части снятого материала, так как для исключения повторного счета особей и корректного расчета площади просмотренного дна необходима полная смена осмотренной площади в кадре. Таким образом, при боковом ходе происходит пропуск большой площади дна, в то время как в центральной части сменяется осматриваемый участок. К тому же возникают ситуации кругового движения аппарата, если судно останавливается, например, в случае сильного бокового ветра или течения. В таком случае этот участок должен быть вырезан из анализа для исключения повторности. Угол наклона аппарата относительно дна отслеживается с помощью инклинометра, исходя из показаний которого оценивается погрешность измерения площади дна и размеров биоты.
В процессе движения судна с БНПА по маршруту ведется запись координат местоположения аппарата, что дает возможность картографировать дно акватории вдоль маршрута движения БНПА. Одновременно ведется запись величин глубины места, регистрируемых судовым эхолотом, либо глубомером БНПА. Это позволяет создать подобие топографической карты в полосе пройденного маршрута съемки и в дальнейшем привязать к ней результаты наблюдений. В процессе анализа видеоизображений возможно определить тип грунта (твердый/мягкий субстрат, песок, глина, наличие валунов или гальки и т.д.), который далее привязывается к топографической карте. При просмотре видеозаписей поверхности дна специалист-наблюдатель может произвести описание, например, типов нор и выходов полихетных трубок, их процентный/площадной объем, скученность и мозаичность. Совместно со сборами, выполненными с помощью дночерпателей и тралов, становится возможным определение принадлежности этих нор/трубок конкретным видам организмов. Особую ценность такие видеосъемки имеют для исследования мест подводной разгрузки метана – сипов [5, 18]. На видеоизображениях таких мест видны абиотические и биотические артефакты, связанные с разгрузкой метана, например, различные нарушения микрорельефа – крупные отверстия, возможно связанные с процессами выделения газов, локальная взрыхленность осадка, неглубокие впадины, следы малых оползней, или трещины в осадке (рис. 4). Цветовые отличия покрова могут свидетельствовать о присутствии восстановленного осадка (темные, почти черные пятна) и присутствии бактериальных обрастаний. На записях эхолотных профилей и в самом видеокадре можно наблюдать выход свободного газа в виде последовательности пузырей различной интенсивности из отверстий в осадке. Видеосъемка позволяет наблюдать различия макрофауны, ассоциированной с “чистым” дном и сипами, площадь распространения/покрытия сипов и соответствующего биоценоза.
Рис. 4.
Стоп-кадр видеозаписи дна в море Лаптевых, полученной с помощью БНПА “Видеомодуль” в 69-м рейсе НИС “Академик Мстислав Келдыш”, 2017 г. На снимке виден бактериальный мат (светлые пятна), который образуется в местах разгрузки метана. Расстояние между лазерными отметками составляет 20 см на дне. В левом верхнем углу отображается сопроводительная информация: дата, время, географические координаты, текущая глубина аппарата и его ориентация (крен, тангаж, рысканье).

Одной из задач исследования донных животных акваторий является определение плотности изучаемых видов (особи на м2), уровня мозаичности сообществ, площади покрытия осадка и сипов, и формирования кластеров/ровности распределения особей в пространстве. Для этого необходим как можно более точный расчет площади осмотренного дна. Как было ранее описано, в связи с волнением, течением и неровным ходом судна, нарезка видеозаписей, полученных с помощью БНПА, на площадные участки на основе пройденного времени или количества кадров может привести к большим погрешностям и повторным подсчетам. В ранних работах [24] для того, чтобы избежать повторов, все видеоряды были просмотрены и нарезаны на отдельные участки дна вручную, на основе визуальных наблюдений (стоп-кадр при прохождении за кадр ранее замеченной структуры). Далее, с помощью линейки измерялся экран и расстояние между отметками от лазеров в кадре и по этим измерениям рассчитывался масштаб изображения, исходя из того, что расстояние между точками 20 см. Такой метод был трудоемким и занимал большое количество времени. В последующих работах стала использоваться оригинальная компьютерная программа, написанная на языке Python, которая использует алгоритмы на основе корреляции характера соседних кадров для определения движения текущего изображения дна. Программа выделяет отдельные участки и автоматически определяет расположение в кадре лазерных пятен, после чего рассчитывает реальную площадь дна [7].
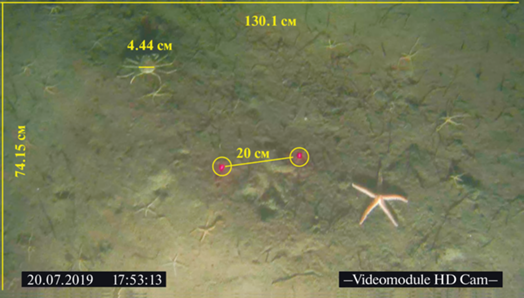
При известном соотношении расстояния между лазерными отметками (20 см) и величины площади дна, попадающей в кадр, возможно посчитать не только плотность определенного вида популяции, но и размерную структуру популяции (рис. 5). Данная работа была нами использована в наблюдении за развитием популяции краба-вселенца в Карском море начиная с 2016 г [7, 24]. Краб-стригун, Chionoecetes opilio, впервые был обнаружен в Карском море в 2012 г. [8]. В 2014 г. в экспедиции ИО РАН молодь этого краба была обнаружена почти на всей территории западного Карского моря и в заливах Новой Земли [23]. С тех пор специалисты ИО РАН ведут наблюдения за ростом и развитием этого крупного промыслового хищника.
Рис. 5.
Стоп-кадр видеосъемки поверхности дна в центральной части Карского моря, снятый БНПА “Видеомодуль” в 76-м рейсе НИС “Академик Мстислав Келдыш”, 2019 г. На снимке присутствует краб-стригун с шириной карапакса 4.44 см, рассчитанной относительно расстояния между лазерными отметками, которое на дне составляет 20 см.
Небольшие исследовательские тралы могут быть достаточно эффективны для поимки крабов, но количественная оценка популяции с их помощью затруднительна. С 2016 г. ведется комплексное исследование развитие популяции краба и его влияния на местную биоту. Для количественной оценки макробентоса используются дночерпательные пробы, траловые сборы и видеонаблюдения. Комплексирование данных, полученных каждым методом, позволяет восполнить пробелы в информации, связанные с недостатками каждого из них. Детальный подсчет особей крабов при обработке видеокадров позволил рассчитать изменения в плотности популяции в разных районах в разные годы, а также изменения их характерных размеров (ширина карапакса и др.) [7, 24]. Так, при сравнении данных, полученных путем анализа траловых сборов и видеосъемок в 2016 г., выявленные размерные группы почти не отличались, за исключением отсутствия крабов размера менее 20 мм, зарегистрированных видеосъемкой. Траловые сборы позволяют проводить раздельный анализ размерных групп для самцов и самок для выявления различий роста, связанных с полом. По материалам видеонаблюдений такой анализ невозможен, равно как и выявление икроносных самок. Однако количество особей, учтенных в видеонаблюдениях больше (например, 295 особей на одном видеоразрезе против 41 особи в двух тралениях) и, соответственно, достоверность статистического анализа при использовании видеоданных гораздо выше.
При анализе видеоразрезов помимо технических особенностей, описанных выше, необходимо принимать во внимание возможные ошибки, связанные с биологией изучаемого объекта (размеры, поведение, трудности в определении вида и т.д.). Так, например, краб-стригун (особенно ювенильные стадии) зарывается в грунт. Тем не менее, на видеоизображениях дна хорошо видно, как крабы частично или полностью погружены в субстрат, и на поверхности грунта заметен только их силуэт. В большинстве случаев такие крабы имели небольшие (ширина карапакса ≤ 30 мм) размеры. Таким образом, можно предположить, что при видеообследовании дна, покрытого рыхлым осадком, молодые крабы, зарывающиеся в грунт, могут быть существенно недоучтены. Второй существенной проблемой учета краба-стригуна при помощи видеосъемки является присутствие в донных сообществах другого, схожего по форме нативного краба Hyas araneus. При определенных ракурсах он практически неотличим от краба-стригуна близкого размера. Таким образом, надежно трактовать данные видеоучета численности Chionoecetes opilio можно, только имея контрольные траловые сборы из изучаемого биотопа.
Крупные крабы-стригуны ведут подвижный образ жизни и при их учете с помощью трала или видеонаблюдения возникает ситуация возможного ухода особей из орудий лова или из поля зрения видеосистемы. Трал Сигсби двигается по грунту медленно и крупные крабы способны уйти от движущегося орудия. Однако наши материалы показывают, что в трал Сигсби все же попадаются крупные особи. Подводный аппарат при буксировке не соприкасается с дном и не создает сильных возмущений среды, однако он толкает перед собой некую массу воды и ярко освещает поверхность дна, что может распугивать крабов. При просмотре видеорядов наблюдались случаи ухода крабов из поля зрения видеокамеры: на илистом грунте возникало облако мути, связанное с движением крупных организмов. В ряде случаев на видеозаписи отмечен процесс убегания краба, тогда этот краб был учтен. В целом, присутствие облака мути на видеозаписях было довольно редким. Даже если считать, что этот феномен связан только с движением крабов, можно говорить о низком влиянии движения БНПА “Видеомодуль” на поведение особей. Полученные данные позволяют заключить, что наиболее информативный способ изучения распространения и размерной структуры популяции чужеродного краба-стригуна в Карском море состоит в комбинированном использовании черпачных и траловых сборов с видеообследованием.
Анализ маршрутных видеозаписей с учетом возможных технических ошибок и особенностей биологии изучаемых видов, может позволить рассчитывать не только плотность и размерную структуру популяции, но и наблюдать за приуроченностью вида к определенным биотопам. При хорошем качестве видеозаписи возможно полное воссоздание изображения площади исследованного дна, что позволит рассчитать удаленность особей друг от друга, образование возможных кластеров поселений и количественно оценить мозаичность донных сообществ (рис. 6). Высококачественные фотоснимки, полученные с помощью фотокамеры высокого разрешения (SONY ILCE 7RM2), позволяют определить более мелкие виды организмов и могут использоваться как “рамки” для пересчета плотности мелких видов за счет привязанности кадров к видеоразрезу.

ОБСЛЕДОВАНИЕ ТЕХНОГЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ
Региональной особенностью Карского моря является присутствие здесь крупнейших подводных захоронений радиоактивных отходов, появившихся с началом развития атомной энергетики. В 1957–1993 гг. в Карское море и заливы Новой Земли (НЗ) было сброшено 1 МКи (38 ПБк) активности (97% сбросов СССР), что делает эти захоронения крупнейшими в водах РФ. Известны затопления 16 ядерных реакторов АПЛ, а также 17 тысяч контейнеров с отходами, представляющими потенциальную ядерную и радиационную опасность. В заливе Степового затоплена АПЛ К-27 с невыгруженным ядерным топливом.
Первые исследования районов захоронений РАО в Карском море были выполнены в экспедициях 1992–1994 гг. на судах Росгидромета и ИО РАН. С 2002 г. в Карском море было проведено 11 экспедиций по проблеме РАО. Уточнялось местоположение объектов, оценивалось их состояние и радиоактивное загрязнение среды. Однако эти работы не завершены. Места затопления многих объектов, упомянутых в архивах, не подтверждены, а их состояние не исследовано и не контролируется [15].
Методики исследования подводных техногенных объектов и природных биологических объектов различны. Исследования первых требуют тщательного позиционирования судна-носителя при буксировке БНПА, чтобы обеспечить попадание объекта в зону действия систем наблюдения БНПА. Основной задачей при этом является получение как можно более четкого и репрезентативного изображения исследуемого объекта – как гидролокационного, так и фото- и видеоизображения. При этом работа с БНПА делится на два этапа: уточнение координат места объекта и непосредственно визуальный осмотр.
Уточнение координат объектов требуется в том случае, когда первоначальный поиск проводился без использования средств подводного позиционирования носителей инструментов поиска, как правило, представляющих собой заглубляемые ГБО средней дальности. Для уточнения координат проводится съемка с использованием высокочастотного ГБО в составе БНПА. Маршрут движения судна строится по схеме “звездочка” [13], т.е. представляет собой систему галсов, пересекающихся в точке, соответствующей предварительно определенному местоположению объекта, и ориентированных вдоль направлений север–юг, восток–запад, северо-восток–юго-запад и северо-запад–юго-восток (рис. 7). Количество и направления галсов могут изменяться в зависимости от трудности маневрирования судном в районе поиска. Для предотвращения столкновения БНПА с исследуемым объектом, расстояние аппарата до дна при буксировке выбирается заведомо больше высоты самого объекта, которая определяется по гидролокационным изображениям, полученным в ходе предварительного поиска. Рабочий диапазон высокочастотного ГБО БНПА выбирается заведомо больше величины погрешности определения координат объекта для гарантированного попадания последнего в полосу обзора ГБО.
Рис. 7.
Схемы маршрутов буксировки БНПА “Видеомодуль”: а – обследование РО АПЛ К-19 в 2019 г. в 76-м рейсе НИС “Академик Мстислав Келдыш” (глубина места – 47 м); б – обследование МБСН с ЯР АПЛ к-140 в 2021 г. в 85‑м рейсе НИС “Академик Мстислав Келдыш” (глубина – 350 м). Пунктирная линия – запланированная сетка галсов по схеме “звездочка”; сплошная линия – траектория движения судна при буксировке аппарата; черный крест – первоначально установленное место объекта; желтый крест – уточненное место объекта.
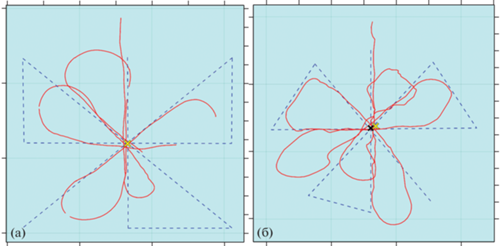
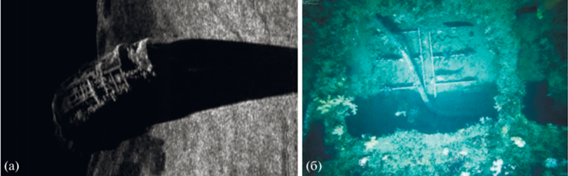
В момент начала регистрации на текущем изображении ГБО объекта поиска на планшете позиционирования аппарата ставится отметка, соответствующая текущему положению аппарата. По гидролокационному изображению определяется расстояние от аппарата до объекта. Соответствующее расстояние откладывается на планшете от отметки по траверзу движения судна, и ставится новая отметка, соответствующая уточненному положению объекта. При этом важно, чтобы аппарат двигался прямолинейно, без боковых смещений: в противном случае изображение объекта будет искажено, а обозначенная отметка недостоверна. Та же процедура повторяется для следующих галсов, в результате чего получается набор отметок, при усреднении местоположения которых можно на порядок уточнить координаты объекта. Точность полученных координат зависит также от глубины, на которой расположен исследуемый объект. При отклонении кабель-троса на угол 2° от вертикали, расстояние аппарата от точки подвеса составляет 30 м на глубине в 1000 м. Если размер объекта составляет десятки метров, то такой точности достаточно для достоверного определения его местоположения. На небольших глубинах углом отклонения кабель-троса и вовсе можно пренебречь. Например, при обследовании реакторного отсека (РО) АПЛ К-19, затопленного на глубине 47 м на входе в залив Абросимова (Новая Земля), уточнение координат не потребовалось, так как изначальное местоположение объекта (рис. 7, слева) было определено достаточно точно. Гидролокационные изображения, полученные в экспедиции МЧС и ИО РАН на НИС “Профессор Штокман” в 2004 г., по которым была получена первоначальная точка местоположения, не позволяли сделать вывод о том, что это за объект. Объект был идентифицирован как РО АПЛ К-19 в 76-м рейсе НИС “Академик Мстислав Келдыш” в 2019 г. [13] Гидролокационное и фотоизображение РО АПЛ К-19 приведено на рис. 8.
Рис. 8.
Гидролокационное изображение (а) и фотоизображение (б), полученные в ходе обследования РО АПЛ К-19 с помощью БНПА “Видеомодуль” в 76-м рейсе НИС “Академик Мстислав Келдыш” в 2019 г. На фотоизображении виден каркас легкого корпуса и прочный корпус с элементами конструкции АПЛ. Высота БНПА над объектом составляет 2.5 м.
Та же методика применялась в 85-м рейсе НИС “Академик Мстислав Келдыш” при поиске и обследовании баржи МБСН, затопленной в Новоземельской впадине [14]. Баржа была обнаружена с помощью среднечастотного ГБО на глубине 350 м. Были определены ее первичные координаты, а дальнейшая работа по их уточнению и идентификации объекта проводилась с помощью БНПА “Видеомодуль”. На рис. 7б изображена “звездочка” из галсов, черным крестом показаны первичные координаты объекта. В результате нескольких проходов с БНПА “Видеомодуль” были получены гидролокационные изображения объекта, а координаты его были уточнены. Желтым крестом обозначена точка с уточненными координатами, находящаяся в 30 м от первоначально определенной. 30-метровая погрешность является существенной, т.к. ширина ее борта не превышает 10 м. Гидролокационное изображение баржи приведено на рис. 9.
Рис. 9.
Гидролокационное изображение (а) и стоп-кадр видеоизображения (б), полученные при обследовании баржи МБСН в Новоземельской впадине с помощью БНПА “Видеомодуль” в 85-м рейсе НИС “Академик Мстислав Келдыш” в 2021 г. На стоп-кадре видна часть шкиперской надстройки с трапом. Высота БНПА над объектом составляет 2 м.

Опыт рассмотренных поисковых операций позволяет утверждать, что на бо́льших глубинах предпочтительно использовать подводные системы навигации, такие как гидроакустические системы с ультракороткой базой, позволяющие более точно определять местоположение БНПА относительно судна. Полученные в ходе уточнения координат гидролокационные изображения позволяют сделать предварительные оценки состояния объекта, а также более детально изучить его форму, определить наличие выступающих элементов (мачты, надстройки), которые могут представлять опасность при работах с БНПА.
Вторым этапом исследования техногенных объектов является их осмотр и идентификация. Задача этого этапа – получить четкое фото- и видеоизображение исследуемого объекта. На этом этапе судно с буксируемым аппаратом движется со скоростью 0.5 узла прямолинейно через точку с уточненными координатам, продолжая или повторяя проход по “звездочке” из галсов. При наличии на судне эхолота, который установлен, как правило, в носовой части судна, по его показаниям можно зарегистрировать момент прохода судна над объектом. Далее судоводители позиционируют судно таким образом, чтобы точка подвеса БНПА в ходе движения приблизилась к точке местоположения объекта. В начале галса БНПА удерживается вблизи грунта (~1.5 м), а при приближении к объекту производится подъем аппарата на высоту, достаточную для удержания объекта в поле зрения. Приближение к объекту контролируется с помощью операторской аналоговой камеры, направленной вперед. Максимальная высота аппарата над объектом ограничивается мутностью воды в исследуемом районе. При этом оператор БНПА ориентируется на изображения сразу двух камер. Камера, направленная вниз, дает информацию о видимости и визуальном охвате объекта в кадре; камера, направленная вперед, позволяет контролировать наличие выступающих частей объекта для своевременного изменения горизонта буксировки аппарата с целью обхода препятствия. При проходе над объектом одновременно производится высокоразрешающая фото-, видео- и гидролокационная съемка (рис. 8, 9).
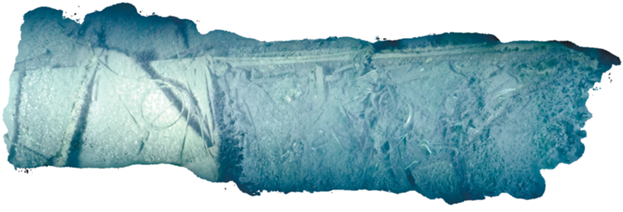
Для повышения надежности интерпретации результатов исследования объектов информация, получаемая разными методами, комплексируется. Например, видеозаписи и гидролокационные изображения можно объединить для детального представления объекта в целом [4]. Также совместная обработка фото- и видеоинформации позволяет построить трехмерную модель части или целого объекта для детального анализа его формы и оценки размеров отдельных частей [2]. На рис. 10 представлено изображение трехмерной модели танкера ТНТ-15, затопленного в Новоземельской впадине, с двух ракурсов. Трехмерная модель позволяет анализировать геометрическую структуру объекта, оценить размеры отдельных его частей, таких как высота фальшборта, высота надстройки, размеры отдельных фрагментов корпуса.
ЗАКЛЮЧЕНИЕ
Массив данных, собранных с помощью БНПА “Видеомодуль” в течение нескольких лет, демонстрирует широкие возможности аппарата для биологических исследований и обследования техногенных объектов. Разница в режимах работы заключается, прежде всего, в более тщательном позиционировании судна при обследовании РАО, а также в необходимости нескольких проходов через одну точку, чтобы увеличить шанс попадания объекта в объектив камеры. При этом на подходе к объекту допускается движения аппарата на небольшой высоте над грунтом, что позволяет попутно проводить вблизи объекта учет донной макрофауны. В обоих случаях (и для биологических исследований, и при обследовании РАО) крайне желательно осуществлять прямолинейное движение аппарата, без боковых смещений, что достигается его конструкцией и правильным подбором скорости и курса судна. При соблюдении этих условий можно получить хорошо поддающийся анализу видеоряд, набор фото и гидролокационных изображений. В дальнейшем из этих изображений можно выбирать как отдельные, не перекрывающиеся области, так и сшивать изображения в полосы и трехмерные модели, позволяющие оценить мозаичность распределения донной фауны при биологических исследованиях, а при обследовании РАО оценить геометрию исследуемого объекта и степень разрушения его конструкций.
Источники финансирования. Работа выполнена в рамках государственного задания ИО РАН (тема № FMWE-2021-0010). Обработка видео- и гидролокационных данных выполнена за счет гранта Российского научного фонда (проект № 23-17-00156).
Благодарности. Авторы благодарят экипаж НИС “Академик Мстислав Келдыш” и его капитана Горбача Ю. Н., сотрудников ИО РАН Кузьмина В.Ю., Белевитнева Я.И., Лежнина В.А., Галкина С.В., Удалова А.А., принимавших непосредственное участие в разработке БНПА “Видеомодуль” и обработке данных, полученных с его помощью, а также академика РАН, д.б.н. Флинта М.В., д.т.н. Римского-Корсакова Н.А., Пояркова С. Г. и Щеглову Я.В., на протяжении нескольких лет организовывавших крупные комплексные экспедиции в Карское море.
Список литературы
Анисимов И.М. О выборе источников искусственного освещения для буксируемого необитаемого подводного аппарата “Видеомодуль” // Океанологические исследования. 2018. Т. 46. № 3. С. 214–224.
Анисимов И.М., Лесин А.В., Муравья В.О., Тронза С.Н. Построение трехмерных моделей затопленных объектов по данным подводной фото- и видеосъемки // Комплексные исследования Мирового океана : Материалы VI Всероссийской научной конференции молодых ученых. Москва, 18–24 апреля 2021 г. М.: ИО РАН, 2021. С. 524–525.
Анисимов И.М., Римский-Корсаков Н.А., Тронза С.Н. Развитие глубоководных технологий визуальных наблюдений рельефа дна и подводных объектов // Международный журнал прикладных и фундаментальных исследований. 2019. № 10. С. 149–153.
Анисимов И.М., Тронза С.Н. Программное комплексирование данных синхронной видеосъемки и гидролокационного обзора поверхности дна // Океанология. 2021. Т. 61. № 3. С. 479–490.
Веденин А.А., Галкин С.В. Исследования континентального склона моря Лаптевых с использованием БНПА “Видеомодуль” // Материалы XVI Всероссийской научно-технической конференции “Современные методы и средства океанологических исследований (МСОИ-2019)”. Т. 2. М.: Издательский дом Академии имени Н.Е. Жуковского, 2019. С. 276–279.
ГНОМ – телеуправляемый подводный аппарат [Электронный ресурс]. URL: https://gnomrov.ru/ (дата обращения: 11.09.2022).
Залота А.К., Спиридонов В.А., Галкин С.В., Пронин А.А. Популяционная структура краба-вселенца (Chionoecetes opilio) в Карском море (траловые сборы и видеоучет) // Океанология. 2020. Т. 60. № 1. С. 97–103.
Зимина О.Л. Находка краба-стригуна Chionoecetes opilio (O. Fabricius. 1788) (Decapoda: Majidae) в Карском море // Биология Моря. 2014. Т. 40. № 6. С. 497–499.
Лесин А.В., Анисимов И.М. Применение волоконно-оптической линии связи для работы с буксируемыми необитаемыми подводными аппаратами // Экология Гидросферы. 2021. № 1 (6). С. 61–68.
Поярков С.Г., Римский-Корсаков Н.А., Флинт М.В. Технические аспекты исследований окружающей среды в западной части Карского моря // Океанологические исследования. 2017. Т. 45. № 1. С. 171–186.
Пронин А.А. Методика сбора и представления материалов видеосъемки поверхности дна с помощью необитаемого подводного буксируемого аппарата “Видеомодуль” // Международный журнал прикладных и фундаментальных исследований. 2017. № 12-1. С. 142–147.
Римский-Корсаков Н.А., Флинт М.В., Поярков С.Г. и др. Развитие технологии комплексных инструментальных подводных наблюдений применительно к экосистемам Российской Арктики // Океанология. 2019. Т. 59. № 4. С. 679–683.
Римский-Корсаков Н.А., Флинт М.В., Казеннов А.Ю. и др. Результаты исследования объектов, представляющих экологическую угрозу, в заливе Абросимова (Новая Земля, Карское море) // Океанология. 2020. Т. 60. № 5. С. 720–728.
Римский-Корсаков Н.А., Книвель Н.Я., Казеннов А.Ю. и др. Радиационно опасные объекты в Российской Арктике (85-ый рейс научно-исследовательского судна “Академик Мстислав Келдыш” в Карское море) // Океанология. 2022. Т. 62. № 3. С. 495–498.
Сивинцев Ю.В., Вакуловский С.М., Васильев А.П. и др. Техногенные радионуклиды в морях, омывающих Россию: радиоэкологические последствия удаления радиоактивных отходов в арктические и дальневосточные моря (“Белая книга-2000”). М.: ИздАТ, 2005. 624 с.
Флинт М.В., Поярков С.Г. Комплексные исследования экосистемы Карского моря (128-й рейс научно-исследовательского судна “Профессор Штокман”) // Океанология. 2015. Т. 55. № 4. С. 723–726.
Флинт М.В., Поярков С.Г., Римский-Корсаков Н.А. Экосистемы Российской Арктики-2015 (63-й рейс научно-исследовательского судна “Академик Мстислав Келдыш”) // Океанология. 2016. Т. 56. № 3. P. 499–501.
Baranov B., Galkin S., Vedenin A. et al. Methane seeps on the outer shelf of the Laptev Sea: characteristic features, structural control, and benthic fauna // Geo-Marine Letters. 2020. V. 40. № 4. P. 541–557.
Jones D., Bett B., Wynn R., Masson D. The use of towed camera platforms in deep-water science // Underwater Technology. 2009. V. 28. № 2. P. 41–50.
McIntyre A.D., Holme N.A. Methods for the study of marine benthos. Oxford: Blackwell Scientific Publications, 1984. 387 p.
Purser A., Marcon Y., Dreutter S. et al. Ocean floor observation and bathymetry system (OFOBS): A new towed camera/sonar system for deep-sea habitat surveys // IEEE Journal of Oceanic Engineering. 2019. V. 44. № 1. P. 87–99.
Shortis M.R., Seager J.W., Williams A. et al. Using Stereo-Video for Deep Water Benthic Habitat Surveys // Marine Technology Society Journal. 2008. V. 42. № 4. P. 28–37.
Zalota A.K., Spiridonov V.A., Vedenin A.A. Development of snow crab Chionoecetes opilio (Crustacea: Decapoda: Oregonidae) invasion in the Kara Sea // Polar Biology. 2018. № 41(10). P. 1983–1994.
Zalota A.K., Zimina O.L., Spiridonov V.A. Combining data from different sampling methods to study the development of an alien crab Chionoecetes opilio invasion in the remote and pristine Arctic Kara Sea // Peer J. 2019. V. 7. e7952.
Дополнительные материалы отсутствуют.