

Проблемы машиностроения и надежности машин, 2022, № 4, стр. 6-13
Структурный анализ и построение рабочей зоны изоморфного поступательно-направляющего механизма параллельной структуры
Т. В. Едакина 1, А. Б. Ласточкин 1, Л. В. Гаврилина 1, *, В. П. Касилов 1, В. С. Рамжаев 1
1 Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
* E-mail: griboedova04@mail.ru
Поступила в редакцию 15.02.2022
После доработки 04.04.2022
Принята к публикации 20.04.2022
- EDN: CTIFFQ
- DOI: 10.31857/S023571192204006X
Аннотация
В статье рассмотрен изоморфный поступательно-направляющий механизм параллельной структуры. Под изоморфностью понимается кинематическая развязка и постоянство поступательных отношений между перемещениями приводов и выходного звена. Для обеспечения вращения рабочего органа вокруг одной оси механизм снабжен дополнительной кинематической цепью, включающей два шарнира Гука. Рассмотрен структурный анализ, построение рабочей зоны, а также конструкция действующей модели.
Для решения задач, поставленных в государственной программе Российский Федерации “Научно-технологическое развитие Российской Федерации” [1], необходимо всемерно использовать эффективные решения, которые предлагает современная наука о машинах [2–6]. В этой связи особый научный и практический интерес представляют механизмы параллельной структуры, отличающиеся повышенными показателями по точности и грузоподъемности. Однако у этих устройств имеется недостаток, связанный с переменными передаточными отношениями между движениями приводов и выходного звена [7–10].
Непостоянство передаточного отношения обусловливает возможность наличия особых положений (сингулярностей), в которых механизм приобретает неуправляемую подвижность, не связанную с движениями в приводах. Это обстоятельство важно с точки зрения использования в различных технических приложениях [11–14].
Для устранения такого недостатка К. Конгом и К. Госленом был предложен механизм, обладающий свойством изоморфности, подразумевающим постоянство передаточных отношений и полную кинематическую развязку по трем поступательным степеням свободы [15]. В дальнейшем в Институте машиноведения им. А.А. Благонравова РАН под руководством академика Р.Ф. Ганиева были предложены схемы, развивающие идеи упомянутого технического решения [16, 17]. В этих схемах отсутствовали поступательные кинематические пары, которые могут обусловить наличие перекосов и заклиниваний.
В настоящей статье представлены новые кинематические схемы, основанные на решениях [16, 17], а также анализируются рабочие зоны.
Рассмотрим структуру изоморфного поступательно-направляющего механизма параллельной структуры, являющегося развитием схемы, предложенной К. Конгом и К. Госленом. В предлагаемом механизме отсутствуют поступательные кинематические пары, склонные к перекосам и заклиниваниям.
Приведем одну кинематическую цепь известного механизма Izoglide (рис. 1а).
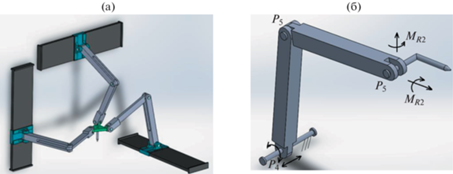
Имеем три кинематические цепи (рис. 1а), каждая из которых включает поступательный привод (оси поступательных приводов расположены ортогонально друг другу) и три последовательно расположенные вращательные кинематические пары с осями, параллельными осям соответствующих приводов. Данный механизм имеет три степени свободы и обеспечивает поступательные движения выходного звена по трем осям. Убедимся в этом.
Воспользуемся формулой Сомова–Малышева
Считаем, что поступательный привод и вращательную пару, связанную с ним, можно рассмотреть как цилиндрическую пару четвертого класса. В соответствии с этим общее число степеней свободы равно нулю. Однако при рассмотрении связей, налагаемых каждой кинематической цепью, следует учесть, что имеют место два момента, препятствующие двум вращениям (рис. 1б).
Матрица плюккеровых координат связей, налагаемых кинематическими цепями, будет представлена шестью плюккеровыми координатами, причем три из них – проекции вектора (1–3 столбцы) на координатные оси x, y, z, а три другие – проекции момента (4–6 столбцы) относительно начала координат на те же координатные оси
Таким образом, имеем матрицу размером 6 × 6, в которой независимыми являются только три строки (ранг равен трем), поэтому налагаются три связи – три момента, которые препятствуют любым возможным вращениям. Итак, механизм имеет три степени свободы – три поступательных движения выходного звена.
Очевидно, что цилиндрическую кинематическую пару, сопрягающую начальное звено каждой кинематической цепи с основанием, можно представить, как совокупность поступательной и вращательной кинематических пар с параллельными осями (рис. 2а).
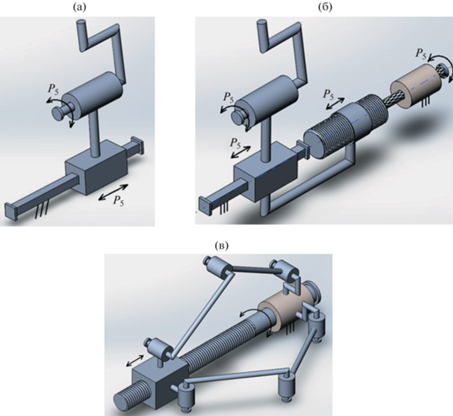
Рис. 2.
Совокупность поступательной и вращательной кинематических пар (а); вращательный привод с винтовой кинематической парой (б); приводной узел с двумя структурными группами (в).
При этом, естественно, число звеньев, число и вид кинематических пар не изменится. Кроме того, не изменится число степеней свободы и матрица связей, налагаемых кинематическими цепями.
Поступательный привод можно заменить вращательным приводом, снабженным винтовой кинематической парой (рис. 2б).
В этом случае двигатель вращает винт, перемещающий гайку (рис. 2б). Эта гайка приводит в движение начальное звено по горизонтальной оси. Далее имеет место начальная вращательная кинематическая пара с осью, параллельной оси поступательной кинематической пары.
Найдем число степеней свободы по формуле Сомова–Малышева
где W – число степеней свободы; p5 – число пар пятого класса; n – число звеньев.Получаем шесть степеней свободы, однако на самом деле число степеней свободы останется равным трем. При наличии вращательной, винтовой и поступательной кинематических пар, расположенных соосно так, что вращательная кинематическая пара является приводной, имеем ситуацию, описываемую структурной формулой
В рассматриваемом механизме в каждой кинематической цепи имеют место три одноподвижные кинематические пары, при этом получаем частичную кинематическую цепь с одной степенью свободы
Здесь n = 3, р5= 3.Таким образом, несмотря на наличие дополнительных кинематических пар и звеньев в каждой кинематической цепи, имеем аналогичную ситуацию, когда число степеней свободы механизма в целом равно трем.
Дальнейшим развитием данной схемы является представление поступательно кинематической пары в каждой цепи в виде двух плоских структурных групп, обуславливающих поступательное перемещение без наличия ползуна и направляющих (рис. 2в).
Поступательную кинематическую пару, которая исключает вращение вокруг оси вращательного привода, можно заменить одной плоской структурной группой Ассура, которая позволяет перемещаться соответствующему звену только в плоскости. Для большей жесткости добавляется еще одна такая же структурная группа, и в совокупности ползун имеет возможность перемещаться только по одной прямой.
В данном случае имеем два аналогичных плоских механизма, расположенных в перпендикулярных плоскостях. Их движение по одной прямой не противоречит друг другу и соответствует наличию одной поступательной кинематической пары.
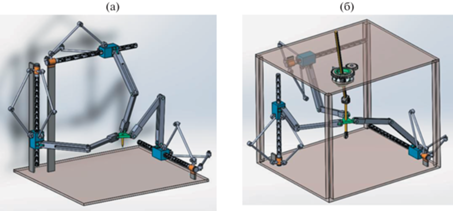
Далее следует присоединить к каждому приводному узлу кинематические цепи, включающие по три вращательные кинематические пары с параллельными осями (рис. 3а).
Рис. 3.
Механизм с тремя вращательными приводами, снабженными структурными группами Ассура: (а) – без дополнительной кинематической цепи; (б) – с дополнительной кинематической цепью.
При этом общее число звеньев и кинематических пар, естественно, изменится. Применяя общую структурную формулу Сомова–Малышева, получим отрицательное значение числа степеней свободы
где W – число степеней свободы; p5 – число пар пятого класса; n – число звеньев.В связи с тем, что приводной узел должен рассматриваться отдельно, число степеней свободы останется неизменным и будет равно трем
Механизм (рис. 3) можно выполнить без дополнительной кинематической цепи (рис. 3а) и с дополнительной кинематической цепью (рис. 3б).
Дополнительная кинематическая цепь (рис. 4) служит для того, чтобы обеспечить рабочему органу еще одну степень свободы, соответствующую вращению вокруг своей оси.
Рис. 4.
Дополнительная кинематическая цепь, обеспечивающая вращение рабочего органа вокруг собственной оси: (а) – зубчатая передача; (б) – шарнир Гука.
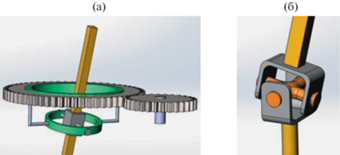
Кинематическая цепь (рис. 4) включает вращательный двигатель, установленный вертикально, двухподвижный шарнир Гука и поступательную кинематическую пару, позволяющую приводному стержню перемещаться вдоль собственной оси. При этом втулка зубчатого колеса жестко сопряжена с крышкой или боковой стенкой, а зубчатое колесо передает вращение на рабочий орган за счет шарнирной связи с поворотным кольцом и одним из шарниров Гука.
В механизме с дополнительной кинематической цепью приводные узлы с тремя вращательными двигателями (рис. 3б) расположены ортогонально друг другу, как и в исходной схеме (рис. 3а), однако верхняя горизонтальная винтовая направляющая крепится к крышке, установленной на стойках, которые расположены по четырем углам основания.
Для установки и закрепления дополнительной кинематической цепи в крышке имеется отверстие, смещенное относительно центра. Варьируя взаимным положением кинематических цепей можно получать различные схемы механизмов.
На основе разработанной схемы была реализована его действующая модель (рис. 5). Основанием механизма является равносторонний треугольник со стороной 73 см. Однако для того, чтобы увеличить рабочую зону механизма, целесообразно вынести привод, управляющий перемещением выходного звена вдоль вертикальной оси, за пределы основания. Выходное звено соединено с ползунами кинематическими цепями с длиной звена 60 см.

Далее рассмотрим расчет рабочей зоны для поступательно-направляющего механизма с тремя степенями свободы с учетом ограничений, определяемых структурой кинематических цепей:
• приводная кинематическая цепь задает ограничения на минимальное и максимальное перемещение ползуна
• основная кинематическая цепь ограничивает перемещения выходного звена при учете длин начальных и промежуточных звеньев указанной цепи.
Построение рабочей зоны проведем в два этапа: вначале построим рабочую зону, которую формируют ограничения основных кинематических цепей (рис. 6а). На втором этапе выполним добавление ограничений, налагаемых приводными кинематическими цепями (рис. 6б).
Рис. 6.
Рабочая зона представлена в виде трехмерной фигуры (а); рабочая зона действующей модели представлена на проекции общей рабочей зоны механизма (б).
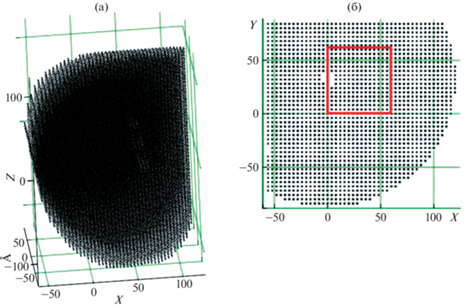
На основе анализа вида рабочей зоны можно утверждать, что ограничения, налагаемые основными кинематическими цепями, обусловливают больший размер рабочей зоны, чем ограничения, налагаемые приводными кинематическими цепями.
Вывод. В настоящей статье представлен новый изоморфный поступательно-направляющий механизм параллельной структуры, в котором исключены поступательные кинематические пары.
Механизм снабжен дополнительной кинематической цепью, позволяющей выходному звену вращаться вокруг одной оси. Проведен структурный анализ и построена рабочая зона механизма.
Дальнейшие исследования будут посвящены кинематическому и динамическому анализу механизма.
Список литературы
Государственная программа Российской Федерации “Научно-технологическое развитие Российской Федерации”. Утверждена постановлением Правительства Российской Федерации от 29 марта 2019 г. № 377.
Ганиев Р.Ф. Проблемы механики машин и технологий. Перспективы развития Института машиноведения им. А.А. Благонравова РАН // Проблемы машиностроения и надежности машин. 2010. № 1. С. 3.
Ганиев Р.Ф. Проблемы механики машин и технологий. Перспективы развития Института машиноведения им. А.А. Благонравова РАН // Проблемы машиностроения и надежности машин. 2010. № 3. С. 3.
Каляев И.А., Капустян С.Г. Групповое управление роботами: проблемы, решения // Известия высших учебных заведений. Машиностроение. 2011. № 12. С. 7.
Лопота А.В., Спасский Б.А. Robotics. A View of the Future // Мехатроника, автоматизация, управление. 2017. Т. 18. № 9. С. 612.
Воробьев Е.И. Осуществление заданного относительного движения двух твердых тел двуруким роботом // Механика твердого тела. 2018. № 2. С. 122.
Bohigas O., Zlatanov D., Ros L., Manubens M., Porta J.M. Numerical computation of manipulator singularities // Proceedings of the IEEE International Conference on Robotics and Automation, 2012, article number 6225083. P. 1351.
Geng J., Arakelian V. Balancing of Planar 5R Symmetrical Parallel Manipulators Taking into Account the Varying Payload // ROMANSY 23 – Robot Design, Dynamics and Control. 2021. P. 372.
Harada T., Kunishige Y. Singularity Free Mode Changes of a Redundantly Driven Two Limbs Six-Dof Parallel Robot // ROMANSY 23 – Robot Design, Dynamics and Control. 2021. P. 405.
Ceccarelli M. Fundamentals of Mechanics of Robotic Manipulations. Kluwer Academic Publishers, 2004. 412 p. https://doi.org/10.1007/978-1-4020-2110-7
Fomin A., Antonov A., Glazunov V. Forward Kinematic Analysis of a Rotary Hexapod // CISM International Centre for Mechanical Sciences 2021. G. Venture et al. (Eds.): ROMANSY 2020, CISM 601, 2021. P. 486.
Велиев Е.И., Ганиев Р.Ф., Глазунов В.А., Скворцов С.А., Чернецов Р.А. Разработка и исследование механизмов с постоянной точкой ввода инструмента в рабочую область, предназначенных для хирургических операций и исследования свойств плазмы // Проблемы машиностроения и надежности машин. 2020. № 6. С. 3.
Laryushkin P., Glazunov V., Erastova K. On the Maximization of Joint Velocities and Generalized Reactions in the Workspace and Singularity Analysis of Parallel Mechanisms // Robotica. Cambridge University Press. 2019. V. 37. P. 675.
Antonov A., Glazunov V. Position, velocity, and workspace analysis of a novel 6-DOF parallel manipulator with “piercing” rods // Mechanism and Machine Theory. 2021. V. 161. P. 104300.
Kong X., Gosselin C. Type Synthesis of Parallel Mechanisms. Springer. 2007. 275 p.
Ганиев Р.Ф., Касилов В.П., Глазунов В.А., Левин С.В., Шалюхин К.А. РФ Патент 133045, 2013.
Ганиев Р.Ф., Касилов В.П., Глазунов В.А. РФ Патент 134474, 2013.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин