

Поверхность. Рентгеновские, синхротронные и нейтронные исследования, 2023, № 4, стр. 55-60
Некоторые вопросы отладки программного обеспечения для сбора и предварительной обработки данных нейтронного детектора на основе двух кольцевых буферов
М. А. Голубев a, *, А. О. Полюшкин a, В. А. Соловей a
a НИЦ “Курчатовский институт” – ПИЯФ
188300 Гатчина, Россия
* E-mail: golubev_ma@pnpi.nrcki.ru
Поступила в редакцию 22.08.2022
После доработки 28.10.2022
Принята к публикации 28.10.2022
- EDN: KBUZBR
- DOI: 10.31857/S1028096023040076
Аннотация
Рассмотрены вопросы отладки программного обеспечения устройства сбора и предварительной обработки данных с сетевым интерфейсом для двумерного позиционно-чувствительного детектора тепловых нейтронов на основе линий задержки. Оригинальное программное обеспечение использует способ передачи данных через два кольцевых буфера. Предложены изменения в коде программного обеспечения для проверки возможности переполнения кольцевых буферов. Показано, что при частоте входных импульсов до 1 МГц потери данных в кольцевых буферах нет. Соответствующее мертвое время регистрации составляет порядка 1 мкс.
ВВЕДЕНИЕ
Ранее [1] было опубликовано описание оригинального устройства для сбора и предварительной обработки данных с сетевым интерфейсом, которое впоследствии должно стать частью двумерных детекторов нейтронов на основе линий задержки. Линии задержки позволяют уменьшить число каналов обработки сигналов двумерного детектора с сотен до пяти, разнося импульсы с соответствующих участков детектора по времени [2], а далее задачу восстановления картинки решает такое устройство. В [1] речь идет о многопроволочных пропорциональных камерах, однако устройство можно использовать и для иных видов двумерных детекторов с линиями задержки, предварительно преобразовав сигналы к логическому виду соответствующим образом. Новшеством среди подобных устройств стало создание пользовательского веб-интерфейса для визуализации и получения данных на основе сетевого протокола HTTP и передача данных по локальной сети через разъем Ethernet. Аналогичные устройства для передачи данных на пользовательский компьютер использовали шину VME [3], PCI [4–7] или разъем USB [8, 9].
Способ передачи данных через два кольцевых буфера является наиболее простым решением для использованного в устройстве одноплатного компьютера с программируемой логической интегральной схемой (ПЛИС). Благодаря уже существующей и интегрированной в среду разработки ПЛИС шине Avalon между ПЛИС и процессором одноплатного компьютера разбить кольцевую память на два буфера – в ПЛИС и в оперативной памяти – оказалось легче, чем делить доступ напрямую к оперативной памяти из ПЛИС с операционной системой одноплатного компьютера.
Кольцевой буфер представляет из себя массив переменных (или соответствующую кольцевую структуру данных), для которого запись и чтение происходят по кругу: по завершении – сначала. Кольцевые буферы используют при регистрации и обработке сигналов в режиме реального времени. В цифровой обработке сигналов их применяют для создания фильтров с конечной импульсной характеристикой [10, 11]. Процесс-производитель, осуществляющий запись в кольцевой буфер, и процесс-потребитель, осуществляющий последующее чтение из кольцевого буфера, могут работать либо в режиме перезаписи, когда непрочитанные данные будут заново перезаписаны в случае переполнения, либо процесс-производитель должен блокироваться по заполнении кольцевого буфера, чтобы не произошло потери уже полученных данных [12]. В случае кольцевой структуры данных с указателями страниц памяти возможно заменять уже заполненные страницы памяти кольцевого буфера пустыми с помощью соответствующих манипуляций с указателями [12]. Однако такая подмена в работе не применима из-за разной арифметики указателей адресного пространства шины Avalon и постраничной передачи данных по сети, что, возможно, будет исправлено в будущих совместимых версиях прошивки и программы.
Целью работы была проверка надежности передачи данных и работоспособности в целом при максимальных нагрузках. Программное обеспечение включает в себя прошивку, многопоточную программу и веб-клиент для работы по локальной сети в отличие от подобных решений [8], содержащих только прошивку и клиент.
ОСОБЕННОСТИ УСТРОЙСТВА
Устройство представляет собой плату собственного производства с преобразователем время–код (time-digital converter) фирмы Acam, соединенную с одноплатным компьютером с ПЛИС от Intel Altera. Эти компоненты на момент создания устройства имели наименьшую стоимость и подходящее качество. Для сигналов двумерного детектора нейтронов – сигнала “старт”, соответствующего моменту регистрации частицы, и четырех сигналов “стоп” от двух линий задержки для координат X и Y – есть пять логических входов. Через конфигурационные регистры разработанной прошивки ПЛИС задается окно времени после сигнала “старт”, соответствующее максимальной из двух линий задержки, в течение которого успевают прийти все сигналы “стоп”. Окно времени, сложенное с некоторой константой, определяемой временем сброса микросхемы-преобразователя время–код, равно мертвому времени регистрации частицы. Так максимальная длина линии задержки для мертвого времени 1 мкс равна 60 нс, однако в разрабатываемых сейчас детекторах на основе многопроволочных пропорциональных камер линии задержки будут по 500 нс, что соответствует мертвому времени 1.4 мкс.
По шине данных микросхемы-преобразователя время–код прошивка ПЛИС собирает 16-битные значения задержек, т.е. по 64 бита на событие, и записывает их в кольцевой буфер внутри ПЛИС на 282 события. Размер буфера ограничен размерами ПЛИС. Этот кольцевой буфер и текущее положение указателя доступно в адресном пространстве памяти операционной системы GNU/Linux одноплатного компьютера по шине данных Avalon. Программа, написанная на языке программирования C, использует отдельный поток исполнения, чтобы извлекать данные из этого кольцевого буфера и записывать их в кольцевой буфер в оперативной памяти размером 64 Мб (8 388 606 событий). В основном потоке исполнения программы работает простой HTTP-сервер, который управляет программой и прошивкой и передает данные из оперативной памяти клиенту, обрабатывая его запросы.
ИСПЫТАНИЯ
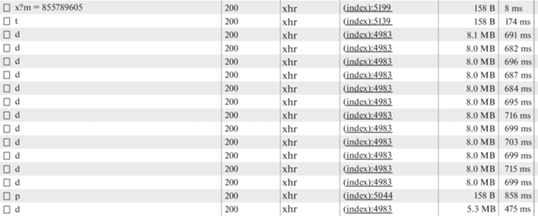
К входу “старт” устройства был подключен генератор с частотой следования импульсов 1 МГц. Была задана длина линий задержки 300 нс. В инструментах разработчика браузера можно видеть, что веб-клиент, запрашивая каждую секунду данные, получает примерно по 4 Мб данных (рис. 1). Это соответствует частоте регистрируемых импульсов 500 кГц. Каждый второй приходящий импульс не регистрируется, потому что приходится на мертвое время, которое больше 1 мкс. Если время линии задержки сократить до 60 нс, то получим, как и предполагалось, примерно по 8 Мб данных в секунду (рис. 2). Очевидно, что ежесекундные запросы в худшем случае в восемь раз меньше размера кольцевого буфера в оперативной памяти, а время такого запроса не превышает секунды, поэтому результаты испытаний кольцевого буфера в оперативной памяти не представляют интереса, и их приводить не будем.
Рис. 1.
Изображение инструмента разработчика веб-браузера, демонстрирующего скорость передачи данных программой клиенту раз в секунду при частоте регистрации событий 500 кГц: t – запуск измерений; d – запрос данных; p – остановка измерения.
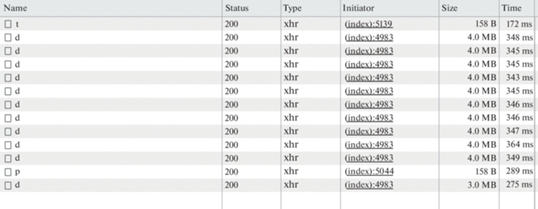
Рис. 2.
Изображение инструмента разработчика веб-браузера, демонстрирующего скорость передачи данных программой клиенту раз в секунду при частоте регистрации событий 1 МГц: t – запуск измерений; d – запрос данных; p – остановка измерения.
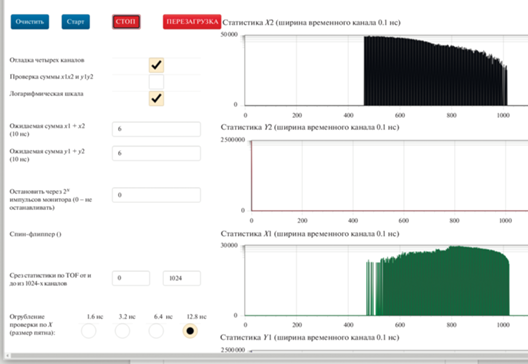
Интерес представляет кольцевой буфер в ПЛИС, поскольку чтение данных из него создает нагрузку, с которой, предположительно, процессор встраиваемого компьютера может не справиться, что приведет к запаздыванию и потере данных. Указатель последнего записанного события, достигая конца буфера, возвращается в начало. Происходит перезапись и потеря предыдущих значений, если они не были прочитаны программой. Программа прочитывает данные из этого буфера по следующему алгоритму: 1) текущее значение указателя прочитывается и записывается в переменную “указатель”; 2) если “указатель” меньше “старого указателя” (по умолчанию указывающего на начало буфера), то значения между “старым указателем” и концом буфера прочитываются и записываются в кольцевой буфер в оперативной памяти, а “старому указателю” присваивается адрес начала памяти; 3) если “указатель” больше “старого указателя” (на предыдущем шаге “старый указатель” мог быть изменен), то значения между “старым указателем” и “указателем” прочитываются и записываются в кольцевой буфер в оперативной памяти, а “старому указателю” присваивается значение “указателя”; 4) ожидаем 10 мкс, чтобы разгрузить процессор, и повторяем сначала. Для того чтобы проверить отсутствие потери данных, на втором шаге перед изменением “старого указателя” перезапишем в кольцевой буфер в оперативной памяти вместо каждого записанного 64-битного события 32-битные значения “указателя” и “старого указателя”. Одного этого изменения в две строчки кода достаточно для проверки, поскольку весь код по отображению и скачиванию данных уже реализован. В результате в веб-клиенте отобразится статистика присвоения значений указателей на адреса кольцевой памяти ПЛИС, которые принимают значения от 462 до 1024 (мы не указываем базовый адрес, который, если вдаваться в подробности, в программе может быть непостоянным, и под указателями подразумеваем смещение относительно базового адреса). Эти данные отобразятся на первом и третьем графиках в веб-клиенте, поскольку старшие 16 бит из 32 не заняты. Их можно скачать в виде CSV-файла и анализировать отдельно (рис. 3, 4). Воспользовавшись логарифмической шкалой как при анализе данных, так и в веб-клиенте, можно увидеть, что даже редкие присвоения не удаляются от краев буфера к середине на этом шаге (рис. 5–7), что было бы необходимым признаком переполнения кольцевого буфера. В случае переполнения и потери данных (эту ситуацию можно инициировать, понизив приоритет программы в операционной системе), эти две гистограммы на каждом графике по мере набора статистики сблизятся и пересекутся (рис. 8).
Рис. 3.
Статистика адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС. Частота регистрации событий 500 кГц.
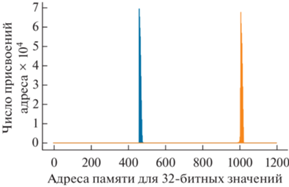
Рис. 4.
Статистика адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС. Частота регистрации событий 1 МГц.

Рис. 5.
Статистика адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС (логарифмическая шкала). Частота регистрации событий 500 кГц.
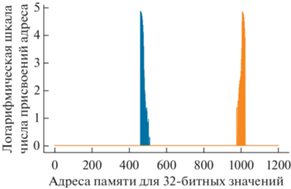
Рис. 6.
Статистика адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС (логарифмическая шкала). Частота регистрации событий 1 МГц.
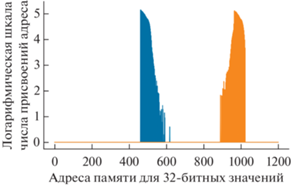
Рис. 7.
Изображение пользовательского веб-интерфейса, демонстрирующего статистику адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС с логарифмической шкалой с неизмененными графиками задержек сигналов (вместо названия оси абсцисс следует подразумевать адрес памяти для 32-битного целого типа). Отсутствие переполнения. Частота регистрации событий 1 МГц.
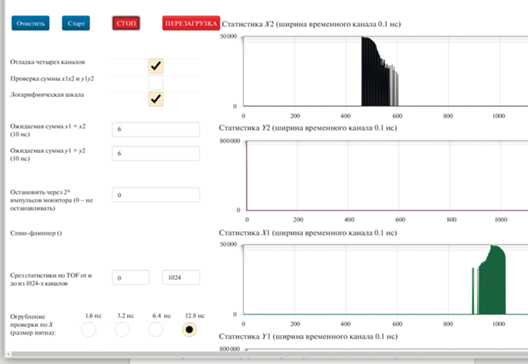
Рис. 8.
Изображение пользовательского веб-интерфейса, демонстрирующего статистику адресов, присвоенных двум указателям потока, копирующего данные при переходе с конца в начало буфера ПЛИС с логарифмической шкалой с неизмененными графиками задержек сигналов (вместо названия оси абсцисс следует подразумевать адрес памяти для 32-битного целого типа). Наличие переполнения. Частота регистрации событий 1 МГц.
ЗАКЛЮЧЕНИЕ
Решение на основе двух кольцевых буферов может показаться слишком сложным, однако это наиболее очевидное решение для этого одноплатного компьютера, не требующее использования низкоуровневых интерфейсов и подразумевающее работу с локальной сетью. Значительно более сложным и эффективным решением в данном случае могла быть модификация ядра операционной системы GNU/Linux и реализация одного кольцевого буфера в оперативной памяти, записываемого напрямую из ПЛИС. Однако программные интерфейсы ядра операционной системы GNU/Linux устаревают быстрее, чем стандарты POSIX, с использованием которого написана программа, а диапазон адресов памяти для обращения по шине Avalon уже зафиксирован в документации одноплатного компьютера. Кроме того, не следует преждевременно разрабатывать более сложное программное обеспечение, чем прошивка ПЛИС и принципиальная схема устройства. Возможны улучшения как программного обеспечения, так и устройства в будущем.
Поток исполнения программы, осуществляющий копирование значений из кольцевого буфера ПЛИС в кольцевой буфер в оперативной памяти, работает с достаточной скоростью, чтобы не происходило переполнения кольцевого буфера ПЛИС. Во втором кольцевом буфере переполнение тоже не происходит, и оно менее вероятно. Представленные данные наглядно демонстрируют работоспособность такой архитектуры.
Список литературы
Голубев М.А., Савельева Т В., Гапон О.Н., Колхидашвили М.Р., Полюшкин А.О., Соловей В.А. // Поверхность. Рентген., синхротр. и нейтрон. исслед. 2022. № 11. С. 1.
Charpak G., Bouclier R., Bressani T., Favier J., Zupančič Č. // Nucl. Instrum. Methods. 1968. V. 65. P. 217. https://doi.org/10.1016/0029-554X (68)90568-5
Kano H., Fukunaga C., Ikeno M., Sasaki O., Sato K., Matsuura S. // IEEE Trans. Nucl. Sci. 2001. V. 48. Iss. 3. P. 509. https://doi.org/10.1109/23.940108
Соловей В.А., Савельева Т.В., Колхидашвили М.Р., Гапон О.Н. // Приборы и техника эксперимента. 2019. Т. 5. С. 145. https://doi.org/10.1134/S0032816219050112
Levchanovsky F.V., Litvinenko E.I., Nikiforov A.S., Gebauer B., Schulz Ch., Wilpert Th. // Nucl. Instrum. Methods Phys. Res. A. 2006. V. 569. Iss. 3. P. 900.https://doi.org/10.1016/j.nima.2006.09.091
Toledo J., Beltrán D., Bordas J., Ramos-Lerate I., Martínez J.C., Fernández F. // IEEE Trans. Nucl. Sci. 2004. V. 51. Iss. 4. P. 1488.https://doi.org/10.1109/TNS.2004.832617
López-Robles J.M., Alfaro R., Belmont-Moreno E., Grabski V., Martínez-Dávalos A., Menchaca-Rocha A. // IEEE Trans. Nucl. Sci. 2005. V. 52. Iss. 6. P. 2841.https://doi.org/10.1109/TNS.2005.862789
Hanu A.R., Prestwich W.V., Byun S.H. // Nucl. Instrum. Methods Phys. Res. A. 2015. V. 780. P. 33. https://doi.org/10.1016/j.nima.2015.01.053
Parsakordasiabi M., Vornicu I., Rodríguez-Vázquez Á., Carmona-Galán R. // Sensors. 2021. V. 21. P. 308.https://doi.org/10.3390/s21010308
Zhang F., Sun G. // 2012 Int. Conf. on Control Engineering and Communication Technology. Washington, December 7–9, 2012. P. 974. https://doi.org/10.1109/ICCECT.2012.102
The Scientist and Engineer’s Guide to Digital Signal Processing. 2011. http://www.dspguide.com/pdfbook.htm.
Lockless Ring Buffer Design. 2009. https://docs.kernel.org/trace/ring-buffer-design.html.
Дополнительные материалы отсутствуют.
Инструменты
Поверхность. Рентгеновские, синхротронные и нейтронные исследования