

Прикладная математика и механика, 2022, T. 86, № 2, стр. 235-250
Капиллярная адгезия упругих тел в условиях частичного проскальзывания
1 Институт проблем механики им. А.Ю. Ишлинского РАН
Москва, Россия
* E-mail: makhovskaya@mail.ru
Поступила в редакцию 03.11.2021
После доработки 10.01.2022
Принята к публикации 21.01.2022
- EDN: HCCQQZ
- DOI: 10.31857/S0032823522020072
Аннотация
Рассмотрена контактная задача для упругого осесимметричного индентора, форма которого описывается степенной функцией, и упругого полупространства в условиях капиллярной адгезии, т.е. при наличии в зазоре мениска жидкости, стягивающего поверхности вне области контакта. Контактирующие тела находятся под действием нормальной и тангенциальной нагрузок в условиях частичного проскальзывания, в области проскальзывания предполагается двучленный закон трения Кулона. В предположении, что материалы индентора и полупространства одинаковы, получены аналитические соотношения для распределения касательных напряжений в контакте, тангенциальной нагрузки и перемещения, а также уравнение для определения размера области сцепления. Проведен анализ контактных характеристик в зависимости от формы индентора, поверхностного натяжения жидкости и капиллярного давления в мениске.
1. Введение. Контакт поверхностей во влажной атмосфере при определенных условиях сопровождается капиллярной конденсацией и образованием менисков жидкости, стягивающих отдельные контактирующие микронеровности двух поверхностей или удерживающих на поверхности микрочастицы износа и загрязнений. Силы капиллярной адгезии, возникающие в таких микроменисках, могут достигать значительных величин и существенно влиять на динамическую и статическую силы трения [1], что является одной из причин заедания и поломок в микромеханических системах [2], а также важным фактором в сцеплении биологических материалов [3].
Для моделирования контакта отдельного выступа или частицы износа с контртелом в условиях статического трения рассматривается решение контактной задачи для осесимметричного индентора и упругого полупространства под действием нормальной и тангенциальной сил, когда приложенная тангенциальная сила недостаточно велика, чтобы вызвать полное скольжение, и область контакта делится на зоны сцепления и проскальзывания. Исследование влияния мениска жидкости, окружающего область контакта, на решение такой задачи является целью настоящей работы.
Решение задачи о контакте с частичным проскальзыванием для двух упругих шаров было получено Каттанео [4] и Миндлиным [5] и обобщено для случая произвольных осесимметричных тел в работах Йегера [6] и позже Чиавареллы [7], а также обобщено для случая трансверсально изотропных тел [8]. Предположение об идентичности материалов контактирующих тел позволило рассматривать задачи о нормальном и тангенциальном нагружении отдельно друг от друга. При этом считалось, что в области скольжения нормальные $p$ и касательные $\tau $ напряжения связаны одночленным законом трения Амонтона $\tau = \mu p$, где $\mu $ – коэффициент трения. В такой постановке были в дальнейшем рассмотрены задачи для различной геометрии взаимодействующих тел, в частности, для текстурированных поверхностей [9, 10].
Влияние адгезии, вызванной межмолекулярными силами, в условиях контакта сухих поверхностей на решение задачи о частичном проскальзывании изучалось в [11–13] для случая плоской задачи и в [14–16] для пространственного осесимметричного контакта. В работах [11–15] решение строилось аналитически в рамках приближения об идентичности материалов взаимодействующих тел, а в [16] – численно для пары различных материалов. Заметим, что локальный закон трения в форме Амонтона $\tau = \mu p$ неприменим для задач с учетом адгезии, в которых контактное давление на части области контакта становится отрицательным, а значит, отрицательным должно быть и касательное напряжение в этой области, что физически невозможно. Поэтому в работах [11, 12, 14] касательное напряжение в области проскальзывания считалось постоянным $\tau = {{\tau }_{0}}$, а в работах [13, 15, 16] использовался закон трения $\tau = \mu p$, но предполагалось, что в области контакта действует только положительное нормальное давление $p$. Однако, закон трения в виде постоянного касательного напряжения $\tau = {{\tau }_{0}}$ не позволяет учесть влияние нормальных напряжений на касательные. Предположение о только положительном нормальном давлении в области контакта также не является физически достоверным, в частности, оно не позволяет исследовать случай отрицательной внешней нагрузки, когда контакт по конечной области существует благодаря адгезии, и контактные давления могут стать отрицательными в значительной части области контакта или во всей этой области.
В настоящей работе предлагается преодолеть эту трудность путем использования двучленного закона трения Кулона в области проскальзывания:
где величины ${{\tau }_{0}}$ и $\mu $ таковы, чтобы обеспечить неотрицательные касательные напряжения во всей области проскальзывания даже при отрицательных значениях нормального давления $p$. В работе рассмотрено контактное взаимодействие в условиях частичного проскальзывания с учетом капиллярной адгезии, вызванной наличием в зазоре между телами мениска жидкости.2. Постановка задачи. Рассматривается контакт упругого полупространства и упругого индентора в присутствии мениска жидкости, стягивающего поверхности вне области контакта. Пусть ось $z$ декартовой системы координат ($x,y,z$) направлена вглубь упругого полупространства, а плоскость $z = 0$ совпадает с поверхностью полупространства. К индентору сначала приложена внешняя нормальная сила $P$, действующая вдоль оси $z$, и после этого приложена тангенциальная сила T, действующая в направлении оси x (рис. 1). Форма индентора описывается функцией $f(x,y)$ = = $A{{({{x}^{2}} + {{y}^{2}})}^{n}}$, где $n \geqslant 1$ – целое число.
Пусть внутри области ${{\Omega }_{c}}$ поверхности находятся в контакте, а мениск занимает область ${{\Omega }_{m}}$. Граничные условия при $z = 0$ для давления и перемещения в направлении оси $z$ определяются формой индентора $f(x,y)$ в области контакта и постоянным капиллярным давлением ${{p}_{0}}$ в области мениска:
(2.1)
$\begin{gathered} {{u}_{z}}(x,y) = - f(x,y) + {{\delta }_{z}};\quad (x,y) \in {{\Omega }_{c}} \\ p(x,y) = - {{p}_{0}};\quad (x,y) \in {{\Omega }_{m}} \\ p(x,y) = 0;\quad (x,y) \notin {{\Omega }_{c}} \cup {{\Omega }_{m}}, \\ \end{gathered} $Считается, что величина тангенциальной силы T недостаточна для того, чтобы вызвать скольжение во всей области контакта ${{\Omega }_{c}}$, т.е. область контакта делится на области сцепления ${{\Omega }_{{st}}}$ и проскальзывания ${{\Omega }_{{sl}}}$. При этом граничные условия в направлении оси x определяются тангенциальным перемещением ${{\delta }_{x}}$ индентора в области сцепления и законом трения (1.1) в области проскальзывания:
(2.3)
$\begin{gathered} {{u}_{x}}(x,y) = {{\delta }_{x}};\quad (x,y) \in {{\Omega }_{{st}}} \\ \tau (x,y) = {{\tau }_{0}} + \mu p(x,y);\quad (x,y) \in {{\Omega }_{{sl}}} \\ \tau (x,y) = 0;\quad (x,y) \notin {{\Omega }_{c}} \\ \end{gathered} $Условия равновесия в нормальном и тангенциальном направлении имеют вид:
(2.4)
$P = \iint\limits_{{{\Omega }_{c}} \cup {{\Omega }_{m}}} {p(x,y)dxdy,\quad }T = \iint\limits_{{{\Omega }_{c}}} {\tau (x,y)dxdy}$3. Метод решения. Решение задачи строится в предположении, что упругие постоянные материалов индентора и полупространства одинаковы, и уравнения, связывающие контактные напряжения и перемещения в нормальном и тангенциальном направлениях не зависят друг от друга [7, 18]:
(3.1)
$\begin{gathered} {{u}_{z}}(x,y) = \frac{1}{{\pi E{\kern 1pt} *}}\iint\limits_{{{\Omega }_{c}} \cup {{\Omega }_{m}}} {\frac{{p(x{\kern 1pt} ',y{\kern 1pt} ')}}{{\sqrt {{{{(x - x{\kern 1pt} ')}}^{2}} + {{{(y - y{\kern 1pt} ')}}^{2}}} }}dx{\kern 1pt} '{\kern 1pt} dy{\kern 1pt} '} \\ {{u}_{x}}(x,y) = \frac{1}{{\pi E{\kern 1pt} *}}\iint\limits_{{{\Omega }_{c}}} {\frac{{\tau (x{\kern 1pt} ',y{\kern 1pt} ')}}{{\sqrt {{{{(x - x{\kern 1pt} ')}}^{2}} + {{{(y - y{\kern 1pt} ')}}^{2}}} }}dx{\kern 1pt} '{\kern 1pt} dy{\kern 1pt} ',} \\ \end{gathered} $Задача о нормальном нагружении упругого осесимметричного контакта при наличии мениска определяется условиями (2.1) и (2.2), а также первыми уравнениями из (2.4) и (3.1). В этом случае задача является осесимметричной: форма индентора описывается функцией $f(r) = A{{r}^{{2n}}}$, где $r = \sqrt {{{x}^{2}} + {{y}^{2}}} $, контактное давление $p$ и перемещение ${{u}_{z}}$ также являются функциями радиальной координаты $r$, область контакта ${{\Omega }_{c}}$ представляет собой круг $r \leqslant a$, а область мениска ${{\Omega }_{m}}$ – кольцо $a \leqslant r \leqslant b$.
В предположении, что угол смачивания обеих поверхностей жидкостью равен нулю и пренебрегая силой натяжения пленки на внешней границе мениска, из формулы Лапласа (2.2) можно получить следующее условие, связывающее капиллярное давление с упругими перемещениями границ взаимодействующих тел, их формой и нормальным внедрением [17]:
Контактная задача о нормальном нагружении осесимметричного индентора, форма которого описывается степенной функцией, с условиями (2.1) и (3.2), а также при условии непрерывности контактного давления на границе области контакта
была рассмотрена и решена в [17]. В результате получены следующие соотношения для распределения контактного давления по радиальной координате r(3.4)
$p(r) = \frac{{nAE{\kern 1pt} *{\kern 1pt} {{a}^{{2n - 1}}}}}{{{{\pi }^{{3/2}}}}}\frac{{{{\Gamma }^{2}}(n + 1)}}{{{{\Gamma }^{2}}(n + 1{\text{/}}2)}}\sqrt {1 - \frac{{{{r}^{2}}}}{{{{a}^{2}}}}} \sum\limits_{m = 1}^n {\frac{{\Gamma (m - 1/2)}}{{\Gamma (m)}}} \frac{{{{r}^{{2(n - m)}}}}}{{{{a}^{{2(n - m)}}}}} - \frac{{2{{p}_{0}}}}{\pi }\operatorname{arcctg} \sqrt {\frac{{{{a}^{2}} - {{r}^{2}}}}{{{{b}^{2}} - {{a}^{2}}}}} ,$(3.5)
${{\delta }_{z}} = A{{a}^{{2n}}}{{\pi }^{{1/2}}}\frac{{\Gamma (n + 1)}}{{\Gamma (n + 1{\text{/}}2)}} - \frac{{2{{p}_{0}}}}{{E{\kern 1pt} *}}\sqrt {{{b}^{2}} - {{a}^{2}}} ,$(3.6)
$P = \frac{{2AE{\kern 1pt} *{\kern 1pt} n{{a}^{{2n + 1}}}}}{{{{\pi }^{{1/2}}}}}\frac{{\Gamma (n + 1)}}{{\Gamma (n + 3{\text{/}}2)}} - 2{{p}_{0}}{{b}^{2}}\left( {\arccos \frac{a}{b} + \frac{a}{b}\sqrt {1 - \frac{{{{a}^{2}}}}{{{{b}^{2}}}}} } \right),$(3.7)
$\begin{gathered} \frac{{A{{a}^{{2n}}}}}{\pi }\left\{ {\left[ {\frac{{{{\pi }^{{1/2}}}\Gamma (n + 1)}}{{\Gamma (n + 1{\text{/}}2)}} - \frac{{{{b}^{{2n}}}}}{{{{a}^{{2n}}}}}} \right]\arccos \frac{a}{b} + \sqrt {\frac{{{{b}^{2}}}}{{{{a}^{2}}}} - 1} \sum\limits_{k = 1}^n {\frac{{(2k - 2)!!}}{{(2k - 1)!!}}\frac{{{{a}^{{2(n - k)}}}}}{{{{b}^{{2(n - k)}}}}}} } \right\} + \\ + \;\frac{{2b{{p}_{0}}}}{{\pi E{\kern 1pt} *}}\left[ {1 - \frac{a}{b} - \sqrt {1 - \frac{{{{a}^{2}}}}{{{{b}^{2}}}}} } \right] + \frac{{2\gamma }}{{{{p}_{0}}}} = 0 \\ \end{gathered} $Если внешняя нормальная нагрузка P и капиллярное давление p0 заданы, то соотношения (3.6) и (3.7) служат в качестве уравнений для численного определения радиуса области контакта a и внешнего радиуса мениска b. После этого распределение контактного давления и внедрение индентора определяются по формулам (3.4) и (3.5), соответственно.
Задача о тангенциальном нагружении задается условиями (2.3) и вторыми из соотношений (2.4) и (3.1). Поскольку распределение нормальных давлений (3.4) зависит только от радиальной координаты $r$, из условий (2.3) следует, что касательное напряжение $\tau $ в области проскальзывания ${{\Omega }_{{sl}}}$ и перемещение ${{u}_{x}}$ в области сцепления ${{\Omega }_{{st}}}$ также являются функциями только радиальной координаты $r$, откуда, в силу формы второго из уравнений (3.1), следует осесимметричность решения задачи о тангенциальном нагружении. Пусть область сцепления ${{\Omega }_{{st}}}$ представляет собой круг $r \leqslant c$, а область проскальзывания ${{\Omega }_{{sl}}}$ – кольцо $c \leqslant r \leqslant a$ (см. рис. 1). Касательное напряжение $\tau (r)$ считается непрерывным на границе областей сцепления и проскальзывания (при $r = c$).
Для определения касательного напряжения в области сцепления воспользуемся теорией Каттанео–Миндлина [4, 5], обобщенной [6, 7] для трехмерного индентора произвольной формы. Представим функцию $\tau (r)$ при $r \leqslant a$ в виде:
где для функции дополнительного касательного напряжения $\tau {\kern 1pt} *{\kern 1pt} (r)$ выполняется условие $\tau {\kern 1pt} *{\kern 1pt} (r) \equiv 0$ при $r \geqslant c$. Подставляя выражение (3.8) во второе соотношение (3.1) и переходя в интегралах к полярным координатам [18], получим(3.9)
${{u}_{x}}(r) = \frac{1}{{\pi E{\kern 1pt} *}}\int\limits_0^a {({{\tau }_{0}} + \mu p(r{\kern 1pt} ')} - \tau {\kern 1pt} *{\kern 1pt} (r{\kern 1pt} ')){\mathbf{K}}\left( {\frac{{2\sqrt {rr{\kern 1pt} '} }}{{r + r{\kern 1pt} '}}} \right)\frac{{r{\kern 1pt} '{\kern 1pt} dr{\kern 1pt} '}}{{r + r{\kern 1pt} '}},$(3.10)
$\frac{1}{{\pi E{\kern 1pt} *}}\int\limits_0^a {p(r{\kern 1pt} '){\mathbf{K}}} \left( {\frac{{2\sqrt {rr{\kern 1pt} '} }}{{r + r{\kern 1pt} '}}} \right)\frac{{r{\kern 1pt} '{\kern 1pt} dr{\kern 1pt} '}}{{r + r{\kern 1pt} '}} = - \frac{{{{p}_{0}}}}{{\pi E{\kern 1pt} *}}\int\limits_a^b {\mathbf{K}} \left( {\frac{{2\sqrt {rr{\kern 1pt} '} }}{{r + r{\kern 1pt} '}}} \right)\frac{{r{\kern 1pt} '{\kern 1pt} dr{\kern 1pt} '}}{{r + r{\kern 1pt} '}} - f(r) + {{\delta }_{z}}$Подставляя выражение (3.10) в (3.9) и учитывая граничные условия (2.3), а также значение интеграла [18]
(3.11)
$\int\limits_0^s {\mathbf{K}} \left( {\frac{{2\sqrt {rr{\kern 1pt} '} }}{{r + r{\kern 1pt} '}}} \right)\frac{{r{\kern 1pt} '{\kern 1pt} dr{\kern 1pt} '}}{{r + r{\kern 1pt} '}} = s{\mathbf{E}}\left( {\frac{r}{s}} \right);\quad r \leqslant s,$(3.12)
$\frac{1}{{\pi E{\kern 1pt} *}}\int\limits_0^с {\tau {\kern 1pt} *} (r{\kern 1pt} '){\mathbf{K}}\left( {\frac{{2\sqrt {rr{\kern 1pt} '} }}{{r + r{\kern 1pt} '}}} \right)\frac{{r{\kern 1pt} '{\kern 1pt} dr{\kern 1pt} '}}{{r + r{\kern 1pt} '}} = - f{\kern 1pt} *{\kern 1pt} (r) + \delta *{\text{,}}$(3.13)
$\begin{gathered} f{\kern 1pt} *{\kern 1pt} (r) = \mu f(r) - \frac{{4\mu {{p}_{0}}}}{{\pi E{\kern 1pt} *}}\left[ {a{\mathbf{E}}\left( {\frac{r}{a}} \right) - b{\mathbf{E}}\left( {\frac{r}{b}} \right)} \right] - \frac{{4{{\tau }_{0}}a}}{{\pi E{\kern 1pt} *}}{\mathbf{E}}\left( {\frac{r}{a}} \right) \\ \delta * = \mu {{\delta }_{z}} - {{\delta }_{x}} \\ \end{gathered} $Поскольку для функции $\tau {\kern 1pt} *{\kern 1pt} (r)$ выполняется условие $\tau {\kern 1pt} *{\kern 1pt} (c) = 0$, то интегральное уравнение (3.12) по форме совпадает с интегральным уравнением контактной задачи о внедрении в упругое полупространство осесимметричного штампа заданной формы $f{\kern 1pt} *{\kern 1pt} (r)$ (3.13) при действии на него нормальной внешней силы, равной по величине
а значит, для решения уравнения (3.12) можно использовать полученные ранее соотношения для решения задачи о нормальном внедрении осесимметричного штампа в полупространство.Воспользуемся решением задачи о внедрении осесимметричного штампа заданной формы $f{\kern 1pt} *{\kern 1pt} (r)$ в упругое полупространство [19]. Полученное выражение для нормального давления под штампом [19], с учетом соотношений (3.12)–(3.14) и (3.8) приобретает вид следующего выражения для искомого касательного напряжения при $r \leqslant c$
(3.15)
$\tau (r) = \mu p(r) + {{\tau }_{0}} - \frac{{E{\kern 1pt} *{\kern 1pt} {{с}^{2}}}}{\pi }\int\limits_0^1 {\frac{y}{{\sqrt {1 - {{y}^{2}}} }}} \int\limits_{r/c}^1 {\frac{x}{{\sqrt {{{x}^{2}}{{с}^{2}} - {{r}^{2}}} }}} \Delta f{\kern 1pt} *{\kern 1pt} (сxy)dxdy$Условие для определения нормального внедрения штампа [19], преобразуется в условие для определения тангенциального перемещения ${{\delta }_{x}}$
(3.16)
$\int\limits_0^1 {\frac{y}{{\sqrt {1 - {{y}^{2}}} }}} \frac{\partial }{{\partial y}}\left( {\mu {{\delta }_{z}}y - {{\delta }_{x}}y - yf{\kern 1pt} *{\kern 1pt} (cy)} \right)dy = 0$Воспользовавшись формулой, полученной Галиным [20] для силы, прижимающей осесимметричный штамп, получим
(3.17)
$T* = 2E{\kern 1pt} *{\kern 1pt} \int\limits_0^с {\Delta f{\kern 1pt} *{\kern 1pt} (r)} r\sqrt {{{с}^{2}} - {{r}^{2}}} dr$В соотношениях (3.15) и (3.17), $\Delta $ – оператор Лапласа в полярных координатах, $\Delta f(r)$ = = $\left( {\frac{1}{r}\frac{\partial }{{\partial r}} + \frac{{{{\partial }^{2}}}}{{\partial {{r}^{2}}}}} \right)f(r)$. При этом искомая полная тангенциальная сила T, с учетом (3.8) и (3.14), а также условий (2.1), определяется как
(3.18)
$T = \mu P + \pi \mu {{p}_{0}}\left( {{{b}^{2}} - {{a}^{2}}} \right) + \pi {{a}^{2}}{{\tau }_{0}} - T{\kern 1pt} *$После подстановки выражений (3.13) в соотношения (3.15)–(3.18) и взятия интегралов (используя методы интегрирования [17]), получим окончательно для касательного напряжения в области сцепления $r \leqslant c$:
(3.19)
$\begin{gathered} \tau (r) = \frac{{\mu nAE{\kern 1pt} *{\kern 1pt} {{\Gamma }^{2}}(n + 1)}}{{{{\pi }^{{3/2}}}{{\Gamma }^{2}}(n + 1{\text{/}}2)}}\left( {\sqrt {1 - \frac{{{{r}^{2}}}}{{{{a}^{2}}}}} \sum\limits_{m = 1}^n {\frac{{\Gamma (m - 1{\text{/}}2)}}{{\Gamma (m)}}} \frac{{{{r}^{{2(n - m)}}}}}{{{{a}^{{1 - 2m}}}}}} \right. - \\ - \;\left. {\sqrt {1 - \frac{{{{r}^{2}}}}{{{{c}^{2}}}}} \sum\limits_{m = 1}^n {\frac{{\Gamma (m - 1{\text{/2}})}}{{\Gamma (m)}}} \frac{{{{r}^{{2(n - m)}}}}}{{{{c}^{{1 - 2m}}}}}} \right) - \\ - \;\frac{{2\mu {{p}_{0}}}}{\pi }\left( {\operatorname{arcctg} \sqrt {\frac{{{{a}^{2}} - {{r}^{2}}}}{{{{b}^{2}} - {{a}^{2}}}}} + \operatorname{arcctg} \sqrt {\frac{{{{c}^{2}} - {{r}^{2}}}}{{{{b}^{2}} - {{c}^{2}}}}} } \right) + \frac{{2({{\tau }_{0}} + \mu {{p}_{0}})}}{\pi }\operatorname{arcctg} \sqrt {\frac{{{{c}^{2}} - {{r}^{2}}}}{{{{a}^{2}} - {{c}^{2}}}}} , \\ \end{gathered} $(3.20)
$\begin{gathered} {{\delta }_{x}} = \frac{{\mu A{{\pi }^{{1/2}}}\Gamma (n + 1)}}{{\Gamma (n + 1{\text{/}}2)}}\left( {{{a}^{{2n}}} - {{c}^{{2n}}}} \right) - \\ - \;\frac{{2\mu {{p}_{0}}}}{{E{\kern 1pt} *}}\left( {\sqrt {{{b}^{2}} - {{a}^{2}}} + \sqrt {{{b}^{2}} - {{c}^{2}}} } \right) + \frac{{2({{\tau }_{0}} + \mu {{p}_{0}})}}{{E{\kern 1pt} *}}\sqrt {{{a}^{2}} - {{c}^{2}}} \\ \end{gathered} $(3.21)
$\begin{gathered} T = \frac{{2\mu AE{\kern 1pt} *{\kern 1pt} n\Gamma (n + 1)}}{{{{\pi }^{{1/2}}}\Gamma (n + 3{\text{/}}2)}}\left( {{{a}^{{2n + 1}}} - {{c}^{{2n + 1}}}} \right) - \\ - \;2\mu {{p}_{0}}{{b}^{2}}\left( {\arccos \frac{a}{b} - \arcsin \frac{c}{b} + \frac{a}{b}\sqrt {1 - \frac{{{{a}^{2}}}}{{{{b}^{2}}}}} + \frac{c}{b}\sqrt {1 - \frac{{{{c}^{2}}}}{{{{b}^{2}}}}} } \right) + \\ + \;2{{a}^{2}}({{\tau }_{0}} + \mu {{p}_{0}})\left( {\arccos \frac{c}{a} + \frac{c}{a}\sqrt {1 - \frac{{{{c}^{2}}}}{{{{a}^{2}}}}} } \right) + \pi \mu {{p}_{0}}\left( {{{b}^{2}} - 2{{a}^{2}}} \right) \\ \end{gathered} $Предельная тангенциальная сила, при которой начинается полное скольжение индентора относительно полупространства, получается из (3.21) при $c = 0$:
(3.22)
${{T}_{{\lim }}} = \mu P + \pi {{a}^{2}}{{\tau }_{0}} + \pi \mu {{p}_{0}}\left( {{{b}^{2}} - {{a}^{2}}} \right),$Если величины $a$ и $b$ определены решением уравнений (3.6), (3.7) задачи о нормальном нагружении, то при заданной тангенциальной силе T численное решение уравнения (3.21) позволяет определить радиус области сцепления c, после чего касательные напряжения в области сцепления и тангенциальное перемещение определяются выражениями (3.19) и (3.20).
В случае $n = 1$ и $A = 1{\text{/}}\left( {2R} \right)$ (индентор в форме параболоида вращения c радиусом кривизны вершины $R$) и $\mu = 0$ (трение в зоне проскальзывания задано законом $\tau (r) = {{\tau }_{0}}$) соотношения (3.19)–(3.21) совпадают с выражениями [14].
4. Результаты расчета. На рис 2,а приведены распределения безразмерного нормального давления $p{\text{/}}E{\kern 1pt} *$ по безразмерной радиальной координате $r{{A}^{{1/(2n - 1)}}}$, где ${{A}^{{ - 1/(2n - 1)}}}$ – характерный размер индентора. Результаты приведены для двух форм индентора, описываемых различными показателями степени n функции $f(r) = A{{r}^{{2n}}}$, и трех величин безразмерного капиллярного давления в мениске ${{p}_{0}}{\text{/}}E{\kern 1pt} *$. Остальные безразмерные параметры задачи считались постоянными – безразмерное поверхностное натяжение жидкости $\gamma {{A}^{{1/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 10–4 и внешняя нормальная сила $P{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = = 10–3, действующая на индентор. Увеличение показателя n соответствует “уплощению” вершины индентора и, вследствие этого, расширению как области контакта, так и области мениска (область постоянного отрицательного давления на графике). Возрастание величины капиллярного давления в мениске приводит к увеличению размера области контакта и возрастанию контактного давления, что более выражено при больших значениях n, при этом ширина кольцевой области, занятой мениском, уменьшается.
Рис. 2.
Распределение нормального (а) и касательного (б) контактных напряжений для двух различных форм индентора ($n = 1$ и 3) и трех значений капиллярного давления: ${{p}_{0}}{\text{/}}E* = 0.005$ (сплошные линии), 0.010 (штриховые линии) и 0.015 (пунктирные линии).
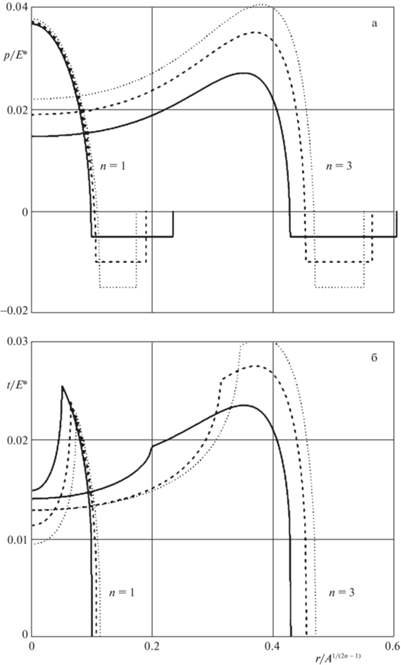
На рис. 2,б приведены распределения безразмерного касательного напряжения $\tau {\text{/}}E{\kern 1pt} *$, соответствующие тем же величинам параметров, что и распределения давления на рис. 2,а. Параметры закона трения (1.1) – $\mu = 0.5$ и ${{\tau }_{0}}{\text{/}}E{\kern 1pt} * = 0.01$ – выбраны таким образом, чтобы касательные напряжения в области контакта оставались положительными, несмотря на то, что нормальные давления становятся отрицательными вблизи границы области контакта (см. рис. 2,а). При этом графики для $n = 1$ рассчитаны при значении безразмерной тангенциальной силы, действующей на индентор, $T{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 6 × 10–4, а для $n = 3$ – при $T{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 7 × 10–3. Точки излома на графиках распределения касательного напряжения соответствуют границе областей сцепления и проскальзывания. Результаты расчета показывают, что возрастание величины капиллярного давления в мениске приводит к расширению области сцепления, при этом величина максимального касательного напряжения ведет себя по-разному в зависимости от формы индентора: при $n = 1$ (индентор параболической формы) максимальное касательное напряжение убывает с возрастанием капиллярного давления, а при $n \geqslant 1$ (инденторы с “уплощенной” вершиной) максимальное касательное напряжение возрастает вместе с капиллярным давлением.
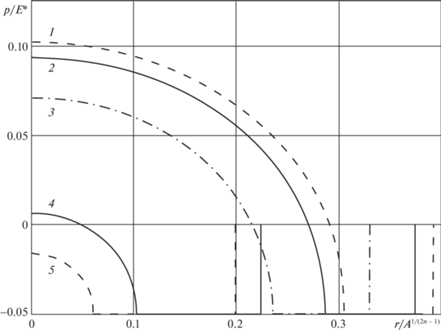
Чтобы проиллюстрировать влияние внешней нормальной силы на контактные характеристики, на рис. 3 приведены распределения контактного давления для различных значений безразмерной силы $P{{A}^{{2/(2n - 1)}}}{\text{/}}E{\text{*}}$. Графики построены при $n = 1$ и $\gamma {{A}^{{1/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 10–3. Увеличение внешней нагрузки приводит к возрастанию площади контакта и максимального контактного давления, при этом, благодаря мениску, контакт существует не только при положительной (вдавливающей индентор) силе, но и в некотором диапазоне отрицательных (отрывающих индентор) внешних нагрузок. Контактные давления отрицательны вблизи границы области контакта, при уменьшении нагрузки область отрицательных давлений расширяется (кривые от 1 до 4). При некотором значении отрицательной нагрузки контактные давления могут стать отрицательными во всей области контакта (кривая 5).
Рис. 3.
Распределение нормального давления для различных значений внешней нормальной силы: $P{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 0.06 (кривая 1), 0.04 (кривая 2), 0.01 (кривая 3), –0.04 (кривая 4) и –0.05 (кривая 5).
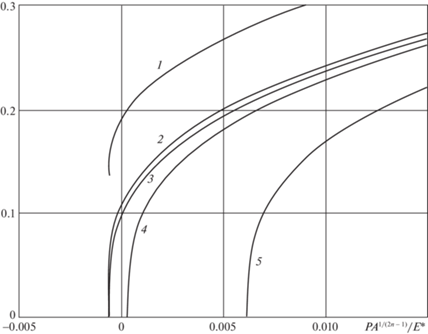
На рис. 4 показаны безразмерные радиусы областей контакта $a{{A}^{{1/(2n - 1)}}}$ и мениска $b{{A}^{{1/(2n - 1)}}}$ в зависимости от безразмерной внешней нормальной силы $P{{A}^{{2/(2n - 1)}}}{\text{/}}E{\text{*}}$ при величине капиллярного давления ${{p}_{0}}{\text{/}}E* = 0.01$ и $n = 1$. Параметры закона трения и безразмерное поверхностное натяжение жидкости равны тем же значениям, при которых построены кривые на рис. 2. Поскольку решение задачи о нормальном нагружении получено независимо от задачи о тангенциальном нагружении, размеры областей контакта и мениска не зависят от величины тангенциальной силы. Однако, размер области сцепления зависит от этой величины. На рис. 3 кривыми 3–5 показаны зависимости радиуса области сцепления от нормальной нагрузки для трех значений тангенциальной силы. При относительно малой величине тангенциальной силы область сцепления существует как при положительных, так и в некоторой области отрицательных значениях нормальной нагрузки (кривая 3). При увеличении тангенциальной силы область сцепления существует, только начиная с некоторого положительного значения нормальной нагрузки, которое возрастает с возрастанием тангенциальной силы (кривые 4 и 5).
Рис. 4.
Зависимость безразмерных радиуса мениска $b{{A}^{{1/(2n - 1)}}}$ (кривая 1), области контакта $a{{A}^{{1/(2n - 1)}}}$ (кривая 2) и области сцепления $c{{A}^{{1/(2n - 1)}}}$ (кривые 3–5) от внешней нормальной нагрузки; кривые 3–5 соответствуют тангенциальной нагрузке $T{{A}^{{2/(2n - 1)}}}{\text{/}}E* = {{10}^{{ - 4}}}$; ${{10}^{{ - 3}}}$ и $5 \times {{10}^{{ - 3}}}$.
На рис. 5 представлены зависимости тангенциальной силы $T$, отнесенной к предельной силе ${{T}_{{\lim }}}$, при которой начинается полное скольжение, от отношения радиусов областей сцепления и контакта $c{\text{/}}a$ для двух форм индентора, определяемых показателем $n$, и различных значениях безразмерного поверхностного натяжения жидкости $\gamma {{A}^{{1/(2n - 1)}}}{\text{/}}E{\text{*}}$. Результаты получены при величинах безразмерной нормальной силы $P{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = 0, капиллярного давления ${{p}_{0}}{\text{/}}E* = 0.1$ и при параметрах закона трения $\mu = 0.5$ и ${{\tau }_{0}}{\text{/}}E* = 0.1$. По мере увеличения тангенциальной силы $T$, относительный радиус области сцепления $c{\text{/}}a$ убывает вплоть до наступления полного скольжения, когда $T = {{T}_{{\lim }}}$ и $c = a$. При этом увеличение показателя n приводит к более медленному убыванию $c{\text{/}}a$ при малых $T$ и более быстрому – при больших $T$, близких к ${{T}_{{\lim }}}$. Увеличение поверхностного натяжения жидкости (или уменьшение модуля упругости взаимодействующих тел) приводит к увеличению зоны сцепления; этот эффект более заметен при $n = 1$, т.е., для индентора параболической формы, чем для форм с уплощенной вершиной.
Рис. 5.
Тангенциальная сила, отнесенная к предельной силе, в зависимости от относительного радиуса области сцепления для двух различных форм индентора ($n = 1$ и 3) и двух значений безразмерного поверхностного натяжения жидкости: $\gamma {{A}^{{1/(2n - 1)}}}{\text{/}}E* = {{10}^{{ - 5}}}$ (сплошные линии) и ${{10}^{{ - 3}}}$ (штриховые линии).

На рис. 6 показаны графики внешнего радиуса мениска b и радиуса области сцепления c, отнесенные к радиусу области контакта a, в зависимости от величины безразмерного капиллярного давления в мениске ${{p}_{0}}{\text{/}}E{\text{*}}$ при безразмерном поверхностном натяжении $\gamma {{A}^{{1/(2n - 1)}}}{\text{/}}E* = {{10}^{{ - 4}}}$, нормальной нагрузке $P{{A}^{{2/(2n - 1)}}}{\text{/}}E* = {{10}^{{ - 4}}}$ и параметрах закона трения $\mu = 0.5$ и ${{\tau }_{0}}{\text{/}}E* = 0.01$, а также при двух разных показателях n, характеризующих форму индентора. Графики $b{\text{/}}a$ расположены в верхней половине рисунка, а графики $c{\text{/}}a$ – в нижней, поскольку во всем диапазоне значений параметров задачи выполняется $b{\text{/}}a \geqslant 1$, $c{\text{/}}a \leqslant 1$ (см. рис. 1). Величина $b{\text{/}}a$ определяется решением задачи о нормальном нагружении (3.6), (3.7), и поэтому не зависит от величины тангенциальной силы. Графики величины $c{\text{/}}a$ на рис. 6 построены для двух значений тангенциальной силы.
Рис. 6.
Внешний радиус мениска (кривые в верхней половине рисунка) и радиус области сцепления (кривые в нижней половине), отнесенные к радиусу области контакта, в зависимости от капиллярного давления для двух различных форм индентора ($n = 1$ и 2) и двух значений тангенциальной силы $T{{A}^{{2/(2n - 1)}}}{\text{/}}E{\kern 1pt} *$ = = $5 \times {{10}^{{ - 4}}}$ (сплошные линии) и $4 \times {{10}^{{ - 4}}}$ (штриховая линия).
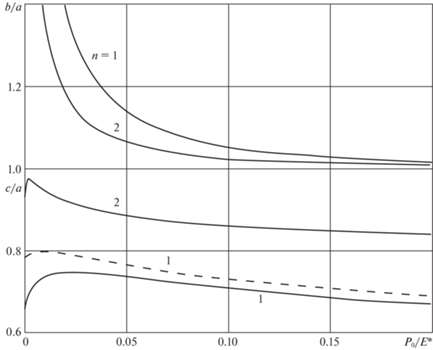
Результаты, представленные на рис. 6, показывают, что при увеличении величины капиллярного давления в мениске величина b/a уменьшается, т.е. уменьшается ширина кольцевой области, занятой мениском. Таким образом, увеличение адгезионного давления, стягивающего поверхности, сопровождается уменьшением области, по которой действует это давление. При этом относительный радиус области сцепления немонотонно зависит от ${{p}_{0}}{\text{/}}E{\text{*}}$: при очень малых величинах капиллярного давления величина c/a резко возрастает, достигает максимума и плавно уменьшается при дальнейшем повышении капиллярного давления ${{p}_{0}}{\text{/}}E{\text{*}}$. Увеличение показателя n (“уплощение” вершины индентора) приводит к уменьшению ширины мениска, но к увеличению радиуса области сцепления по отношению к контактному радиусу, при этом максимум c/a сдвигается в сторону меньших ${{p}_{0}}{\text{/}}E{\text{*}}$. Увеличение тангенциальной нагрузки приводит к уменьшению относительного радиуса области сцепления c/a, при этом ее максимум сдвигается в сторону больших значений капиллярного давления ${{p}_{0}}{\text{/}}E{\text{*}}$.
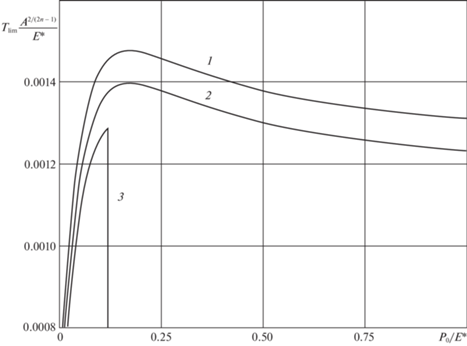
Безразмерная величина ${{T}_{{\lim }}}{{A}^{{2/(2n - 1)}}}{\text{/}}E{\text{*}}$ предельной тангенциальной силы, при которой возникает переход к полному скольжению, показана на рис. 7 как функция безразмерного капиллярного давления ${{p}_{0}}{\text{/}}E{\text{*}}$ для трех значений нормальной нагрузки – положительной (прижимающей индентор к полупространству), нулевой и отрицательной (отрывающей индентор от полупространства). Зависимость предельной тангенциальной силы от капиллярного давления также немонотонна. Контакт существует при нулевых и отрицательных нагрузках благодаря действию капиллярной адгезии. Однако, при отрицательной нагрузке увеличение капиллярного давления ${{p}_{0}}{\text{/}}E{\text{*}}$ может приводить к разрыву контакта (кривая 3).
Рис. 7.
Предельная тангенциальная сила в зависимости от капиллярного давления для трех значений нормальной силы: $P{{A}^{{2/(2n - 1)}}}{\text{/}}E* = {{10}^{{ - 4}}}$ (кривая 1), 0 (кривая 2), $ - {{10}^{{ - 4}}}$ (кривая 3).
Заметим, что для мениска, образовавшегося за счет капиллярной конденсации из окружающего воздуха и находящегося с ним в термодинамическом равновесии, капиллярное давление определяется уравнением Кельвина [18]
где ${{T}_{0}}$ – абсолютная температура, ${{R}_{g}}$ – универсальная газовая постоянная, ${{V}_{m}}$ – молярный объем жидкости, $H$ – относительная влажность окружающего воздуха. Уравнение (3.1) описывает монотонное убывание величины ${{p}_{0}}$ с возрастанием относительной влажности $H$. Таким образом, в случае адгезии, вызванной капиллярной конденсацией из атмосферы, величины, немонотонно зависящие от капиллярного давления ${{p}_{0}}$ (относительный радиус области сцепления c/a и предельная тангенциальная сила ${{T}_{{\lim }}}$), будут немонотонно зависеть и от влажности $H$ – возрастать с увеличением $H$ до некоторого значения влажности, а затем убывать.Заключение. Построено решение контактной задачи о нормальном и тангенциальном нагружении осесимметричного индентора, форма которого описывается степенной функцией, в контакте с упругим полупространством из такого же материала при наличии капиллярной адгезии. Задача рассмотрена в условиях частичного проскальзывания, когда область контакта делится на зоны сцепления и проскальзывания, при этом в области проскальзывания действует двучленный закон трения. Получены аналитические выражения для касательных напряжений в области сцепления, внешней тангенциальной нагрузки и тангенциального перемещения индентора, а также для предельной тангенциальной силы, при которой происходит переход к полному скольжению. Исследовано влияние на эти контактные характеристики формы индентора, поверхностного натяжения жидкости и капиллярного давления в мениске.
Установлено, в частности, что увеличение показателя n степенной функции, описывающей форму индентора (“уплощение” вершины индентора) и увеличение поверхностного натяжения жидкости приводят к возрастанию области сцепления и предельной тангенциальной силы, необходимой для перехода к полному скольжению. При этом величина предельной тангенциальной силы немонотонно зависит от капиллярного давления в мениске, определяемого относительной влажностью окружающего воздуха.
Работа выполнена при финансовой поддержке РФФИ, грант № 21-58-52006.
Список литературы
Sun Y., Song C., Liu Z., et al. Effect of relative humidity on the tribological/conductive properties of Cu/Cu rolling contact pairs // Wear. 2019. V. 436. 203023.
Maboudian R., Ashurst W.R., Carraro C. Tribological challenges in micromechanical systems // Tribol. Lett. 2002. V. 12. P. 95–100.
Klaassen M., de Vries E.G., Masen M.A. The static friction response of non-glabrous skin as a function of surface energy and environmental conditions // Biotribol. 2017. V. 11. P. 124–131.
Cattaneo C. Sul contatto di due corpi elastici: distribuzione locale degli sforzi // Rendiconti dell’Accademia nazionale dei Lincei. 1938. V. 27. P. 342–348.
Mindlin R.D. Compliance of elastic bodies in contact // ASME Trans. J. Appl. Mech. 1949. V. 16. P. 259–268.
Jäger J. Axi-symmetric bodies of equal material in contact under torsion or shift // Arch. Appl. Mech. 1995. V. 65. P. 478–487.
Ciavarella M. Tangential loading of general three-dimensional contacts // ASME Trans. J. Appl. Mech. 1998. V. 65. № 4. P. 998–1003.
Argatov I., Mishuris G. Tangential contact of elastically similar bodies // in: Indentation Testing of Biological Materials. Cham: Springer, 2018. P. 129–146.
Горячева И.Г., Маланчук Н.И., Мартыняк P.M. Контактное взаимодействие тел с периодическим рельефом при частичном проскальзывании // ПММ. 2012. Т. 76. Вып. 5. С. 695–709.
Lyubicheva A.N., Tsukanov I.Y. The influence of 2D periodic surface texture on the partial slip problem for elastic bodies // Europ. J. Mech. A. 2022. V. 91. 104405.
Sari O.T., Adams G.G., Muftu S. Nano-scale effects in the sliding and rolling of a cylinder on a substrate // ASME Trans. J. Appl. Mech. 2005. V. 72. № 5. P. 633–640.
Adams G.G. Stick, partial slip and sliding in the plane strain micro contact of two elastic bodies // R. Soc. Open Sci. 2014. V. 1. 140363.
Yan J., Huang G. A double-Hertz model for adhesive contact between cylinders under inclined forces // Proc. R. Soc. A. 2019. V. 475. 20180589.
Savkoor A.R. Dry Adhesive Friction of Elastomers: A Study of the Fundamental Mechanical Aspects. Delft: Univ. Technol., 1987.
Popov V.L., Dimaki A.V. Friction in an adhesive tangential contact in the Coulomb-Dugdale approximation // J. Adhesion. 2017. V. 93. № 14. P. 1131–1145.
Bazrafshan M., Rooij M.B., Schipper D.J. On the role of adhesion and roughness in stick-slip transition at the contact of two bodies: A numerical study // Tribol. Int. 2018. V. 121. P. 381–388.
Горячева И.Г., Маховская Ю.Ю. Контактирование упругих тел при наличии капиллярной адгезии // ПММ. 1999. Т. 63. Вып. 1. С. 128–137.
Джонсон К. Механика контактного взаимодействия. М.: Мир, 1989. 510 с.
Довнорович В.И., Яшин В.Ф. Некоторые пространственные задачи теории упругости. Гомель: БИИЖТ, 1961. 55 с.
Галин Л.А. Контактные задачи теории упругости и вязкоупругости. М.: Наука, 1980. 303 с.
Дерягин Б.В., Чураев Н.В., Муллер В.М. Поверхностные силы. М.: Наука, 1985. 398 с.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика