

Прикладная математика и механика, 2022, T. 86, № 3, стр. 424-444
Контакт с межмолекулярным взаимодействием для вязкоупругого слоя (самосогласованный подход): диссипация энергии при индентировании и сила трения
1 Институт проблем механики им. А.Ю. Ишлинского РАН
Москва, Россия
* E-mail: iasoldat@hotmail.com
Поступила в редакцию 31.12.2021
После доработки 31.03.2022
Принята к публикации 05.04.2022
- EDN: MSKJEG
- DOI: 10.31857/S0032823522030109
Аннотация
Рассматривается контакт бесконечно протяженного плоского индентора и вязкоупругого слоя в рамках самосогласованного по Дерягину подхода с поверхностным (традиционная постановка) и объемным (уточненная постановка) приложением сил межмолекулярного взаимодействия. С привлечением первого начала термодинамики решена задача по определению диссипации энергии в вязкоупругом слое при заданном законе подвода/отвода индентора. На основе этого решения произведен расчет силы трения при скольжении шероховатого контртела по вязкоупругому слою. Результаты расчетов свидетельствуют о существенном влиянии скачкообразного изменения контактного зазора во времени на диссипацию энергии и силу трения.
При изучении контакта деформируемых тел силы межмолекулярного взаимодействия впервые учитывались применительно к герцевскому контакту [1]. В дальнейшем был разработан ряд эффективных подходов к решению контактных задач такого типа, среди которых следует отметить подходы, использующие концепцию поверхностной энергии – модели JKR и DMT [2, 3]. Эти подходы также использовались для расчета адгезионного контакта слоистых [4–7] и вязкоупругих тел [8–11].
Строгая постановка контактной задачи, учитывающая межмолекулярное взаимодействие, предполагает существование некоторого зазора $r$ между контактирующими телами. Величина этого зазора должна обеспечивать баланс сил, обусловленных контактной деформацией тел и их межмолекулярным взаимодействием (самосогласованный подход по Дерягину [12]). При таком подходе возможны постановки задачи с поверхностным (традиционная постановка [13–15]) и объемным (уточненная постановка [16–20]) приложением сил межмолекулярного взаимодействия.
Одной из характерных особенностей адгезионного контакта является возможность скачкообразного изменения его параметров. Впервые подобное изменение было теоретически описано применительно к подпружиненному контакту твердых тел при наличии сил Лондона–Ван-дер-Ваальса [21]. В дальнейшем скачкообразное изменение параметров адгезионного контакта упругих тел рассматривалось во многих исследованиях, среди которых отметим работы [12–14, 22], использующие самосогласованный подход при постановке задачи.
Аналогичная самосогласованному подходу концепция используется в теории бесконтактного трения, допускающей существование контактного зазора между трущимися поверхностями [23–27]. Были рассмотрены различные механизмы такого трения, например, эмиссия фононов, джоулева диссипация, эффекты сил Ван-дер-Ваальса.
Ранее был выполнен расчет напряженно-деформированного состояния (НДС) и диссипации энергии в вязкоупругом слое при наличии сил межмолекулярного взаимодействия (самосогласованный подход, традиционная и уточненная постановки задачи) при заданном контактном зазоре $r(t)$ [28], а также был выполнен расчет зазора $r(t)$ при заданном законе внедрения $\delta (t)$ индентора [29].
В данной работе, на основе полученных ранее результатов [28, 29], определяется диссипация энергии в вязкоупругом слое в режиме подвода/отвода индентора при заданном законе его внедрения. На основе решения этой задачи произведен расчет силы трения скольжения шероховатого контртела по вязкоупругому слою в режиме бесконтактного трения. Изучается влияние скачкообразного изменения контактного зазора во времени на диссипацию энергии и силу трения.
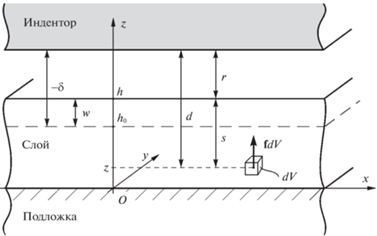
1. Постановка задачи. Рассмотрим контактное взаимодействие бесконечно протяженного плоского индентора и основания, состоящего из вязкоупругого слоя, связанного с подложкой, причем индентор и подложка являются абсолютно жесткими (рис. 1). Считается, что индентор и слой разделены контактным зазором $r$, обеспечивающим баланс сил вязкоупругого и межмолекулярного взаимодействий контактирующих тел (самосогласованный подход) [12]. Свяжем с основанием систему координат $Oxyz$, совместив ее плоскость $Oxy$ с границей раздела слоя и подложки. Контакт индентора и слоя считается плоскопараллельным, что обуславливает зависимость всех контактных характеристик только от координаты $z$ и времени $t$. Толщину слоя в недеформированном состоянии обозначим через ${{h}_{{{\kern 1pt} 0}}}$, а в деформированном – через $h$.
Рис. 1.
Контактное взаимодействие индентора с основанием, состоящим из вязкоупругого слоя, связанного с абсолютно жесткой подложкой.
Межмолекулярное взаимодействие индентора и основания определяется парными взаимодействиями их молекул (гипотеза Гамакера). Соответствующая сила $F$ зависит от свойств пары молекул и расстояния $l$ между ними. Существуют разные формы такой зависимости, и в дальнейшем будет использоваться известный закон Леннард-Джонса [30]:
где ${{a}_{1}},{{a}_{2}},m,n$ – параметры взаимодействия, причем обычно полагают $m = 7,$ $n = 13$.При определенных допущениях [14, 31] суммирование парных взаимодействий молекул позволяет для каждой точки слоя рассчитать объемную силу ${\mathbf{f}}$, обусловленную межмолекулярным взаимодействием. Эта сила направлена вдоль оси $z$ и зависит от расстояния $d = r + s = r + h - z$ между точкой ее приложения и индентором (рис. 1), причем толщину $h$ слоя здесь можно заменить постоянным значением ${{h}_{{{\kern 1pt} 0}}}$, что допустимо при малых деформациях. Таким образом, если обозначить через ${{f}_{i}}$, $i = 1,2,3$ компоненты объемной силы в системе координат $O{\kern 1pt} x{\kern 1pt} y{\kern 1pt} z$, то
Суммирование парных взаимодействий молекул позволяет также определить полную силу $p$ воздействия индентора на основание, приходящуюся на единицу площади его поверхности (верхней границы):
которая в рамках самосогласованного подхода интерпретируется как контактное давление [12–14, 19]. Кроме того, исключив из контактного давления $p$ силу воздействия индентора на подложку, можно определить фиктивное контактное давление ${{p}_{c}}$, обусловленное межмолекулярным воздействием индентора только на слой:(1.4)
${{p}_{c}}(t) = {{\Phi }_{c}}(r(t)),\quad {{\Phi }_{c}}(r) = - \int\limits_0^{{{h}_{{{\kern 1pt} 0}}}} f (r + s)ds$Выражения для функций $f(d)$ и $\Phi (r)$ в случае закона Леннард-Джонса приведены в [28, 29], тогда как функция ${{\Phi }_{c}}(r)$ имеет вид
(1.5)
${{\Phi }_{c}}(r) = - \frac{{{{A}_{{1c}}}}}{{r_{{ec}}^{k}}}\left\{ {\left[ {{{{\left( {\frac{{{{r}_{{ec}}}}}{r}} \right)}}^{k}} - {{{\left( {\frac{{{{r}_{{ec}}}}}{H}} \right)}}^{k}}} \right] - \left[ {{{{\left( {\frac{{{{r}_{{ec}}}}}{r}} \right)}}^{l}} - {{{\left( {\frac{{{{r}_{{ec}}}}}{H}} \right)}}^{l}}} \right]} \right\},$Традиционная постановка контактной задачи при наличии межмолекулярного взаимодействия подразумевает, что определяемое по формуле (1.3) контактное давление прикладывается к поверхности слоя, в результате чего он деформируется [12–15]. Ниже также рассматривается уточненная постановка, в которой естественным образом предполагается, что деформация слоя порождается объемными силами (1.2), распределенными по его глубине, тогда как поверхность слоя свободна от нагрузок [16–20]. В качестве параметра нагружения слоя в обеих постановках выступает зазор $r$, однозначно определяющий объемную силу ${{f}_{i}}$ по формуле (1.2) и контактное давление $p$ по формуле (1.3).
Замечание 1. В работах [28, 29] расчет НДС слоя при традиционной постановке задачи выполнялся в предположении, что к его поверхности прикладывается контактное давление $p$. Однако это давление, согласно выражению (1.3), определяется межмолекулярным воздействием индентора не только на слой, но и на недеформируемую подложку. В связи с этим, представляется более корректным выполнять расчет НДС слоя, полагая, что он нагружается фиктивным контактным давлением ${{p}_{c}}$ вида (1.4), обусловленным межмолекулярным воздействием индентора только на слой.
Деформационные свойства слоя описываются линейным законом наследственного типа [32–34]
(1.6)
$\begin{gathered} {{\sigma }_{{ij}}}(z,t) = {{\delta }_{{ij}}}\lambda \theta (z,t) + 2\mu {{\varepsilon }_{{ij}}}(z,t) - {{\delta }_{{ij}}}\int\limits_{ - \infty }^t {\Lambda (t - \tau )\theta (z,\tau )d\tau - } 2\int\limits_{ - \infty }^t {{\rm M}(t - \tau ){{\varepsilon }_{{ij}}}(z,\tau )d\tau } \equiv \\ \equiv {{\delta }_{{ij}}}\lambda \theta (z,t) + 2\mu {{\varepsilon }_{{ij}}}(z,t) + \sigma _{{ij}}^{{v}}(z,t), \\ \end{gathered} $(1.7)
$\Lambda (t) = K{{R}_{2}}(t) - \frac{2}{3}\mu {{R}_{1}}(t),\quad {\rm M}(t) = \mu {\kern 1pt} {{R}_{1}}(t),$Для построения полной системы уравнений НДС слоя соотношение (1.6) следует дополнить формулой Коши и уравнением равновесия [32, 33]:
Для дальнейших выкладок потребуется конкретизировать ядра интегральных операторов в соотношении (1.6). Не ограничивая общности рассмотрения, пренебрежем объемной ползучестью материала слоя и положим [34]: ${{R}_{{{\kern 1pt} 1}}}(t) = {{R}_{{{\kern 1pt} 0}}}{{e}^{{ - \alpha {\kern 1pt} t}}},$ ${{R}_{{{\kern 1pt} 2}}}(t) \equiv 0$, так что, в силу соотношений (1.7):
(1.8)
$\Lambda (t) = {{\Lambda }_{0}}{{e}^{{ - \alpha {\kern 1pt} t}}},\quad {\rm M}(t) = {{{\rm M}}_{0}}{{e}^{{ - \alpha {\kern 1pt} t}}},$В качестве контактной характеристики будем использовать внедрение $\delta $ индентора в слой, отсчитываемое от поверхности слоя в недеформированном состоянии, т.е. от уровня $z = {{h}_{{{\kern 1pt} 0}}}$ (рис. 1). Отметим, что внедрение $\delta $ может принимать как положительные, так и отрицательные значения, причем последний случай изображен на рис. 1. Имеет место условие контакта
связывающее внедрение $\delta $ с зазором $r$ и перемещением $w = h - {{h}_{{{\kern 1pt} 0}}}$ поверхности слоя вдоль оси $z$.Считается, что до момента времени $t = 0$ взаимодействие индентора с основанием является стационарным с постоянными во времени внедрением ${{\delta }^{s}}$ и зазором ${{r}^{s}}$, т.е.
Далее будет рассматриваться непрерывная зависимость $\delta (t)$, отвечающая переходу слоя из начального стационарного состояния (1.10) в другое стационарное состояние с конечным внедрением ${{\delta }_{m}}$ индентора, т.е.
(1.11)
$\delta (t) \in C( - \infty ,\infty );\quad \delta (t) = {{\delta }^{s}},\quad t \leqslant 0;\quad \delta (t) = {{\delta }_{m}},\quad t \geqslant {{t}_{m}},$Здесь и далее точкой над символом функции обозначается ее производная по времени.
Подобный характер изменения внедрения $\delta (t)$ позволяет допустить асимптотическое поведение функции $r(t)$ на бесконечности:
где ${{r}_{m}}$ – значение контактного зазора в стационарном состоянии с внедрением ${{\delta }_{m}}$.Начальное ${{r}^{s}}$ и конечное ${{r}_{m}}$ значения зазора, отвечающие начальному ${{\delta }^{s}}$ и конечному ${{\delta }_{m}}$ внедрению, находятся из уравнения [29]
(1.15)
${{B}^{\infty }}{{h}_{0}}Z\left( {\left\{ \begin{gathered} {{r}^{s}} \hfill \\ {{r}_{m}} \hfill \\ \end{gathered} \right\}} \right) - \left\{ \begin{gathered} {{r}^{s}} \hfill \\ {{r}_{m}} \hfill \\ \end{gathered} \right\} = \left\{ \begin{gathered} {{\delta }^{s}} \hfill \\ {{\delta }_{m}} \hfill \\ \end{gathered} \right\}$Здесь и далее функция $Z(r)$ определяется по правилу
причем верхний/нижний вариант в круглых скобках отвечает традиционной/уточненной постановке задачи.Изменение зазора $r$ во времени описывается дифференциальным уравнением:
(1.16)
$\dot {r}(t) = \frac{{\dot {\delta }(t) - \beta \left[ {{{B}^{\infty }}{{h}_{0}}Z(r(t)) - r(t) - \delta (t)} \right]}}{{B{{h}_{0}}Z{\kern 1pt} '(r(t)) - 1}},$Уравнение (1.16), как и прежде [29], получается путем дифференцирования по $t$ условия контакта (1.9), в котором граничное перемещение $w$, как компонента НДС слоя, известным образом выражается через функцию $r(t)$. Однако здесь для расчета НДС при традиционной постановке задачи используется фиктивное контактное давление ${{p}_{c}}$ (Замечание 1), поэтому в уравнении (1.16) присутствует функция ${{\Phi }_{c}}(r)$, тогда как прежде использовалась функция $\Phi (r)$.
Далее будет допускаться возможность существования у функции $r(t)$ нескольких точек разрывов первого рода [35], что, в свою очередь, обусловлено тем, что знаменатель в правой части дифференциального уравнения (1.16) может принимать нулевые значения [29]. Решение такого уравнения может быть построено при помощи известных численных методов (например, метода Рунге–Кутты четвертого порядка точности [36]) с привлечением специальной процедуры учета разрывов функции [29].
Как указывалось выше, при рассматриваемом плоскопараллельном контакте индентора и слоя (рис. 1), компоненты ${{\varepsilon }_{{ij}}},{{\sigma }_{{ij}}}$ НДС слоя зависят только от координаты $z$ и времени $t$, поэтом все они равны нулю, кроме ${{\varepsilon }_{{33}}}$, ${{\sigma }_{{11}}} = {{\sigma }_{{22}}}$, ${{\sigma }_{{33}}}$ [28]. Для этих компонент ранее были получены формулы [28], которые без труда переносятся на рассматриваемый случай функции $r(t)$ с несколькими точками разрыва первого рода:
(1.17)
${{\varepsilon }_{{33}}}(z,t) = \frac{{B{{{\rm N}}_{0}}}}{\alpha }w_{{,z}}^{s}(z){{e}^{{ - \beta t}}} + {{\tilde {w}}_{{,z}}}(z,t)$(1.18)
${{\sigma }_{{11}}}(z,t) = {{\sigma }_{{22}}}(z,t) = 2{{\mu }_{*}}\frac{\beta }{\alpha }w_{{,z}}^{s}(z){{e}^{{ - \beta t}}} + \tilde {\sigma }(z,t),\quad {{\sigma }_{{33}}}(z,t) = - {{X}_{{,z}}}(z,t),$(1.19)
$\tilde {\sigma }(z,t) = - B\left[ {\lambda {{X}_{{,z}}}(z,t) + \frac{3}{2}KB{{{\rm N}}_{0}}\int\limits_0^t {{{e}^{{ - \beta (t - \tau )}}}{{X}_{{,z}}}(z,\tau )d\tau } } \right]$В равенствах (1.19), как и прежде, верхний/нижний вариант в круглых скобках отвечает традиционной/уточненной постановке задачи, причем записи верхнего варианта предполагают, что НДС слоя обусловлено фиктивным контактным давлением ${{p}_{c}}$, согласно Замечанию 1. Присутствующие в равенствах (1.19) функции ${{f}_{3}}(z,t)$ и ${{p}_{c}}(t)$ определяются по формулам (1.2) и (1.4), ${{f}^{s}}(z) = f({{r}^{s}} + {{h}_{0}} - z)$, $p_{c}^{s} = {{\Phi }_{c}}({{r}^{s}})$. Оператор $\mathcal{R}$ был определен ранее [28], здесь же только отметим, что он действует на функцию по аргументу $z$.
Из определения (1.6) величины $\sigma _{{ij}}^{{v}}$ и формул (1.17), (1.18) вытекает соотношение
которое будет использоваться в следующем разделе.Важной особенностью формул (1.17), (1.18) является то, что их правые части и, следовательно, компоненты НДС слоя, выражаются через функцию $X(z,t)$. Согласно равенствам (1.2), (1.4) и (1.19), эта функция целиком определяется функцией $r(t)$, которая, будучи решением дифференциального уравнения (1.16), находится по известному внедрению $\delta (t)$ индентора. Указанные обстоятельства позволят нам в дальнейшем на основе формул (1.17), (1.18) рассчитать диссипацию энергии в вязкоупругом слое при заданном внедрении $\delta (t)$, ввиду того, что диссипация энергии целиком определяется эволюцией во времени НДС слоя [28]. В свою очередь, это позволит найти гистерезисные потери при подводе–отводе индентора и силу трения скольжения шероховатого индентора о вязкоупругий слой.
2. Расчет диссипации энергии. При деформировании некоторого объема $V = S{\kern 1pt} {{h}_{{{\kern 1pt} 0}}}$ вязкоупругого слоя площадью $S$ на промежутке времени $[{{t}_{1}},{{t}_{2}}]$ происходит диссипация энергии ${{D}_{{{\kern 1pt} [{{t}_{1}},{{t}_{2}}]}}}$, определяемая как теплота, выделенная объемом $V$ за это время. Согласно первому началу термодинамики [33]:
(2.1)
${{D}_{{{\kern 1pt} [{{t}_{1}},{{t}_{2}}]}}} = \int\limits_V {{{W}_{{[{{t}_{1}},{{t}_{2}}]}}}dV} - \left[ {U({{t}_{2}}) - U({{t}_{1}})} \right],$(2.2)
${{W}_{{[{{t}_{1}},{{t}_{2}}]}}} = \int\limits_{{{t}_{1}}}^{{{t}_{2}}} {{{\sigma }_{{ij}}}(\tau )d{{\varepsilon }_{{ij}}}(\tau )} $В дальнейшем также будет использоваться удельная потенциальная энергия $\Pi $ упругой деформации. Она определяется через компоненты ${{\varepsilon }_{{ij}}}$ по известной формуле [37], которая для рассматриваемого случая НДС имеет вид [28]
(2.3)
$\Pi ({{\varepsilon }_{{ij}}}) = \frac{1}{{2B}}\varepsilon _{{33}}^{2},\quad {{\Pi }^{\infty }}({{\varepsilon }_{{ij}}}) = \frac{1}{{2{{B}^{\infty }}}}\varepsilon _{{33}}^{2},$Как указывалось в предыдущем разделе, функция $r(t)$ может иметь разрывы первого рода. Учитывая это, допустим, что функции ${{\varepsilon }_{{ij}}}(t)$ и ${{\sigma }_{{ij}}}(t)$ тоже имеют точку разрыва $\hat {t} \in [{{t}_{1}},{{t}_{2}}]$ первого рода, являясь кусочно-гладкими.
Отметим, что при наличии у функций ${{\varepsilon }_{{ij}}}(t)$ и ${{\sigma }_{{ij}}}(t)$ разрывов в одной и той же точке $\hat {t}$, интеграл Стилтьеса (2.2), представляющий работу деформации, не существует [35]. Однако, исходя из физического смысла работы, можно выполнить регуляризацию этого интеграла. Для этого следует заменить скачкообразное изменение функции $r(t)$ в произвольно малой окрестности $(\hat {t} - \mu ,\hat {t} + \mu )$ точки $\hat {t}$ некоторым непрерывным изменением и вычислить соответствующие функции ${{\varepsilon }_{{ij}}}(t)$, ${{\sigma }_{{ij}}}(t)$ и интеграл (2.2). После этого для полученного интеграла необходимо выполнить предельный переход $\mu \to 0$, приводящий к исходным разрывам функций $r(t)$, ${{\varepsilon }_{{ij}}}(t)$ и ${{\sigma }_{{ij}}}(t)$ в точке $\hat {t}$. В результате, как и прежде [28], выражение (2.2) для удельной работы деформации можно представить в следующем виде
(2.4)
${{W}_{{[{{t}_{1}},{{t}_{2}}]}}} = \Pi (\varepsilon _{{ij}}^{ + }(\hat {t})) - \Pi (\varepsilon _{{ij}}^{ - }(\hat {t})) + \sigma _{{ij}}^{{v}}(\hat {t})\left[ {\varepsilon _{{ij}}^{ + }(\hat {t}) - \varepsilon _{{ij}}^{ - }(\hat {t})} \right] + \int\limits_{{{t}_{1}}}^{{{t}_{2}}} {{{\sigma }_{{ij}}}(\tau ){{{\dot {\varepsilon }}}_{{ij}}}(\tau )d\tau } ,$В соответствии с допущениями (1.11) и (1.14), далее будет рассматриваться процесс деформирования слоя из стационарного состояния ${{\varepsilon }_{{ij}}}(t) = \varepsilon _{{ij}}^{s}$, ${{\sigma }_{{ij}}}(t) = \sigma _{{ij}}^{s}$, $t \leqslant 0$, отвечающего $\delta (t) = {{\delta }^{s}}$, $r(t) = {{r}^{s}}$, в асимптотически стационарное состояние ${{\varepsilon }_{{ij}}}(t) \to \varepsilon _{{ij}}^{\infty }$, ${{\sigma }_{{ij}}}(t) \to \sigma _{{ij}}^{\infty }$, $t \to \infty $, отвечающее $\delta (t) = {{\delta }_{m}}$, $r(t) = {{r}_{m}}$. Для каждого такого состояния внутренняя энергия $U$ вязкоупругого слоя определяется по формуле [28]
Подстановка выражения (2.5) в равенство (2.1) позволяет получить следующее выражение для удельной диссипации энергии ${{d}^{\infty }}$ за время рассматриваемого процесса деформирования слоя:
(2.6)
${{d}^{\infty }} \equiv \frac{1}{S}\mathop {\lim }\limits_{t \to \infty } {{D}_{{[0,t]}}} = \int\limits_0^{{{h}_{{{\kern 1pt} 0}}}} {\left\{ {{{W}^{\infty }}(z) - \left[ {{{\Pi }^{\infty }}(\varepsilon _{{ij}}^{\infty }(z)) - {{\Pi }^{\infty }}(\varepsilon _{{ij}}^{s}(z))} \right]} \right\}{\kern 1pt} dz} ,$В силу соотношений (2.3), (2.4), правая часть равенства (2.6) определяется эволюцией во времени компонент ${{\varepsilon }_{{ij}}}$, ${{\sigma }_{{ij}}}$ НДС слоя. Заменим в (2.6) эти компоненты их выражениями (1.18) и (1.20), отметив, что выражение (1.20) содержит непрерывную по $z$ функцию $\sigma _{{33}}^{{v}}(z,t)$ и, поэтому, позволяет эффективно определять скачки функций в правой части равенства (2.4). В результате можно установить, что
(2.7)
${{d}^{\infty }} = \frac{{B{{{\rm N}}_{0}}}}{\alpha }{{B}^{\infty }}[\beta {{I}^{\infty }} - ({{K}^{\infty }} - {{K}^{s}}){\text{/}}2],$(2.8)
$I(t) = \int\limits_0^t {[K(\tau ,\tau ) - {{e}^{{ - \beta \tau }}}K(0,\tau ) - \beta \int\limits_0^\tau {{{e}^{{ - \beta (\tau - s)}}}K(\tau ,s)} ds]d\tau } $Формула (2.7) позволяет рассчитать диссипацию энергии в вязкоупругом слое при заданном внедрении $\delta (t)$. Действительно, правая часть равенства (2.7) целиком определяется функцией $r(t)$, т.к. через эту функцию, согласно формулам (1.2) и (1.4), определяются функции ${{f}_{3}}(z,t)$ и ${{p}_{c}}(t)$. В свою очередь, функция $r(t)$ находится из дифференциального уравнения (1.16) по заданному внедрению $\delta (t)$.
В качестве примера были выполнены расчеты диссипации энергии при линейном изменении внедрения $\delta $ индентора за время ${{t}_{m}}$ от начального ${{\delta }^{s}}$ до конечного ${{\delta }_{m}}$ значений:
(2.9)
$\delta (t) = \left\{ \begin{gathered} {{\delta }^{s}},\quad t \leqslant 0 \hfill \\ {{\delta }^{s}} + \dot {\delta }t,\quad t \in (0,{{t}_{m}}) \hfill \\ {{\delta }_{m}},\quad t \geqslant {{t}_{m}} \hfill \\ \end{gathered} \right.,$Расчеты проводились при следующих значениях параметров задачи: $m = 7$, $n = 13$, ${{r}_{{ec}}} = 1$ нм, ${{r}_{{eb}}} = 0.5\,{{r}_{{ec}}}$, ${{h}_{{{\kern 1pt} 0}}} = $ 5 нм, ${{\delta }^{s}} = - \,4{\kern 1pt} {\kern 1pt} {{r}_{{ec}}}$, $\dot {\delta }$ = 2.625 мкм/с, $\lambda \simeq 2.08$ МПа, $\mu \simeq 3.13$ МПа, ${{R}_{{{\kern 1pt} 0}}} = 0.8 \times {{10}^{3}}$ с–1, ${{t}_{r}} = $ ${{10}^{{ - 3}}}$ с, при этом значения мгновенного и длительного коэффициентов упругой податливости слоя составляли $B$ = 0.12 МПа–1 и ${{B}^{\infty }}$ = 0.2 МПа–1, соответственно. Кроме того, полагалось, что ${{A}_{{{\kern 1pt} 1c}}} = {{(6\pi )}^{{ - 1}}}{{A}_{H}}$ [12] и ${{A}_{{{\kern 1pt} 1b}}} = 10{{A}_{{{\kern 1pt} 1c}}}$, где ${{A}_{H}}$ – постоянная Гамакера, ${{A}_{H}} = {{10}^{{ - 19}}}$ Дж.
Для графического представления результатов расчетов здесь и далее будут использоваться безразмерные величины: $\tilde {t} = t{\text{/}}{{t}_{r}}$, $\tilde {r} = r{\text{/}}{{r}_{{ec}}}$, ${{\tilde {r}}_{m}} = {{r}_{m}}{\text{/}}{{r}_{{ec}}}$, ${{\tilde {\delta }}_{m}} = {{\delta }_{m}}{\text{/}}{{h}_{{{\kern 1pt} 0}}}$, ${{\tilde {d}}^{{{\kern 1pt} \infty }}} = {{d}^{\infty }}{\text{/}}{{d}_{*}}$, где ${{d}_{*}} = ({{B}^{\infty }} - B){{h}_{0}}p_{*}^{2}$, ${{p}_{*}} = {{A}_{{1c}}}{\text{/}}r_{{ec}}^{{m - 4}}$. Сплошная/штриховая линия на графиках отвечает уточненной/традиционной постановке задачи. Для обеспечения условия малости деформаций, при расчетах значения внедрения $\delta (t)$ полагались существенно меньшими толщины ${{h}_{{{\kern 1pt} 0}}}$ слоя.
Отметим, что величина $p_{*}^{{}}$ может быть использована в качестве оценки контактного давления, определяемого по формуле (1.3), причем ${{p}_{*}}$ выражается через постоянную Гамакера [12] или поверхностную энергию [14]. Величина ${{d}_{*}}$ совпадает с удвоенным значением диссипации энергии ${{d}^{\infty }}$ в случае ступенчатого изменения контактного давления от 0 до ${{p}_{*}}$ при традиционной постановке задачи [28]. Для выбранных параметров задачи ${{p}_{*}} \simeq 5.305$ МПа, ${{d}_{*}} \simeq 1.126 \times {{10}^{{ - 2}}}$ Дж/м2.
На рис. 2 показаны расчетные зависимости диссипации энергии ${{d}^{\infty }}$ от конечного внедрения ${{\delta }_{m}}$ при уточненной и традиционной постановках задачи.
Рис. 2.
Зависимости диссипации энергии ${{d}^{\infty }}$ от конечного внедрения ${{\delta }_{m}}$. Точки A, B и C соответствуют значениям ${{\tilde {\delta }}_{m}} = - 0.52$, –0.464 и –0.44. Сплошная/штриховая линия отвечает уточненной/традиционной постановке задачи.
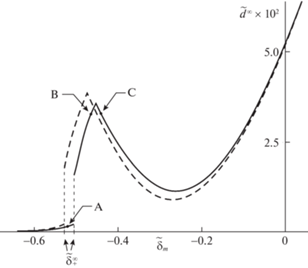
Представленные зависимости имеют особенности в виде разрывов и изломов, которые вызваны резкими изменениями вида функции $r(t)$ с ростом внедрения ${{\delta }_{m}}$. В свою очередь, эти изменения обусловлены немонотонным характером функции $Z(r)$ и могут быть объяснены с помощью графического описания эволюции контактного зазора $r$ в процессе подвода/отвода индентора [29]. Таким образом можно установить, что разрыв зависимости ${{d}^{\infty }}({{\delta }_{m}})$ происходит при ${{\delta }_{m}} = \delta _{ + }^{\infty }$, причем величина $\delta _{ + }^{\infty }$ известным образом определяется видом функции $Z(r)$ и ее значения в безразмерном виде $\tilde {\delta }_{ + }^{\infty } = \delta _{ + }^{\infty }{\text{/}}{{h}_{0}}$ показаны на рис. 2. Сам разрыв обусловлен появлением скачка у функции $r(t)$ с резким изменением ее конечного значения ${{r}_{m}}$, тогда как излом зависимости ${{d}^{\infty }}({{\delta }_{m}})$ связан с возникновением ситуации, когда скачок функции $r(t)$ происходит в период $(0,\;{{t}_{m}})$ изменения внедрения $\delta (t)$.
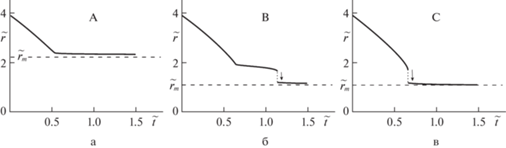
Подобные изменения вида функции $r(t)$ иллюстрируются рис. 3, на котором эта функция показана для точек A (${{\tilde {\delta }}_{m}} = - 0.52$), B (${{\tilde {\delta }}_{m}} = - 0.464$) и C (${{\tilde {\delta }}_{m}} = - 0.44$), расположенных на графике ${{d}^{\infty }}({{\delta }_{m}})$ до и после разрыва/излома (рис. 2). Для определенности используется уточненная постановка задачи.
Рис. 3.
Зависимости контактного зазора $r$ от времени $t$ в режиме подвода индентора для точек A, B и C на рис. 2.
Согласно вышеизложенному, и это подтверждается расчетами, зависимость ${{d}^{\infty }}({{\delta }_{m}})$ представляется гладкой линией без разрыва и излома, если для каждого значения ${{\delta }_{m}}$ функция $r(t)$ не имеет скачков и значение ${{r}_{m}}$, как решение уравнения (1.15), непрерывно зависит от ${{\delta }_{m}}$. Для выполнения этих условий достаточно, чтобы [29]
Нарушение условия (2.10) приводит к скачкообразному росту диссипации энергии ${{d}^{\infty }}$ при достижении внедрением ${{\delta }_{m}}$ критического значения $\delta _{ + }^{\infty }$ (рис. 2).
Представленные на рис. 2 графики демонстрируют близость значений диссипации энергии ${{d}^{\infty }}$ для уточненной и традиционной постановок задачи при больших значениях ${{\delta }_{m}}$. Такая близость объясняется тем, что при больших внедрениях индентора зазор $r$ становится малым и межмолекулярное взаимодействие обуславливается главным образом малыми значениями аргумента функции $f(r + s)$, присутствующей в равенствах (1.2)–(1.4). В свою очередь, это приводит к тому, что функции $K(t,\tau )$ и, следовательно, значения диссипации энергии ${{d}^{\infty }}$ для уточненной и традиционной постановок задачи, определяемые по формулам (2.7), (2.8), становятся близкими друг к другу. Указанные обстоятельства подтверждают правомерность использования фиктивного контактного давления ${{p}_{c}}$ для расчета НДС слоя при традиционной постановке задачи (Замечание 1).
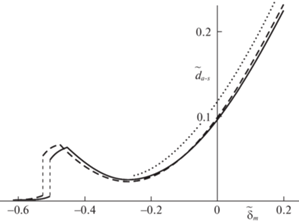
Рис. 4.
Зависимости гистерезисных потерь ${{d}_{{a - s}}}$ от конечного внедрения ${{\delta }_{m}}$. Сплошная/штриховая линия отвечает уточненной/традиционной постановке задачи. Пунктирная линия отвечает традиционной постановке задачи при допущении, что слой нагружается контактным давлением $p$.
Замечание 2. В режиме подвода (1.12)/отвода (1.13) индентора, приложенная к нему внешняя сила совершает работу
причем, по закону сохранения энергии: где $\Delta U$ и $\Delta E$ – изменения внутренней энергии слоя и энергии поля межмолекулярного взаимодействия, приходящиеся на единицу площади слоя. Последнее равенство означает, что работа ${{A}^{{{\text{ext}}}}}$ внешней силы не может служить мерой диссипации энергии в слое.3. Гистерезисные потери при индентировании определяются как суммарная диссипация энергии ${{d}_{{a - s}}}$ за цикл подвод–отвод индентора [38]:
(3.1)
${{d}_{{a - s}}} = {{\left. {{{d}^{\infty }}} \right|}_{{{\text{app}}}}} + {{\left. {{{d}^{\infty }}} \right|}_{{{\text{ret}}}}},$Действительно, этот цикл подразумевает, что после подвода и формирования стационарного состояния слоя (формула (1.14)), происходит отвод индентора в стационарное состояние, совпадающее с начальным для режима подвода состоянием. Другими словами, между начальными и конечными значениями внедрения и зазора, отвечающими режимам подвода и отвода индентора имеют место следующие соотношения:
(3.2)
${{\left. {{{\delta }^{s}}} \right|}_{{{\text{ret}}}}} = {{\left. {\delta _{m}^{{}}} \right|}_{{{\text{app}}}}},\quad {{\left. {\delta _{m}^{{}}} \right|}_{{{\text{ret}}}}} = {{\left. {{{\delta }^{s}}} \right|}_{{{\text{app}}}}},\quad {{\left. {{{r}^{s}}} \right|}_{{{\text{ret}}}}} = {{\left. {r_{m}^{{}}} \right|}_{{{\text{app}}}}},\quad {{\left. {r_{m}^{{}}} \right|}_{{{\text{ret}}}}} = {{\left. {{{r}^{s}}} \right|}_{{{\text{app}}}}}$Таким образом, величины ${{\left. {{{d}^{\infty }}} \right|}_{{{\text{app}}}}}$ и ${{\left. {{{d}^{\infty }}} \right|}_{{{\text{ret}}}}}$ в выражении (3.1) для суммарной диссипации энергии находятся при помощи формулы (2.7) с учетом соотношений (3.2).
В качестве примера были выполнены расчеты гистерезисных потерь ${{d}_{{a - s}}}$ при линейном законе (2.9) изменения внедрения $\delta (t)$ в режимах подвода и отвода индентора. Расчеты проводились при значениях параметров задачи, указанных в предыдущем разделе.
На рис. 4 показаны расчетные зависимости гистерезисных потерь ${{d}_{{a - s}}}$ от конечного внедрения ${{\delta }_{m}} = {{\left. {\delta _{m}^{{}}} \right|}_{{{\text{app}}}}}$ с использованием безразмерной величины ${{\tilde {d}}_{{a - s}}} = {{d}_{{a - s}}}{\text{/}}{{d}_{*}}$. Как и следовало ожидать, имея ввиду результаты предыдущего раздела (рис. 2), при больших внедрениях ${{\delta }_{m}}$ уточненная и традиционная постановки задач дают близкие значения ${{d}_{{a - s}}}$.
Пунктирная линия на рис. 4 отвечает традиционной постановке задачи при допущении, что слой нагружается контактным давлением $p$, определяемым по формуле (1.3). Как видно, использование в качестве нагрузки фиктивного контактного давления ${{p}_{c}}$ приводит к более корректным результатам расчетов (штриховая линия на рис. 2), что вполне согласуется с замечанием 1.
Обращает на себя внимание то, что зависимости ${{d}_{{a - s}}}({{\delta }_{m}})$ являются немонотонными и имеют локальные максимумы и минимумы. Кроме того, эти зависимости имеют особенности в виде разрывов и изломов, причины появления которых указаны в предыдущем разделе.
4. Трение скольжения. Рассмотрим межмолекулярное взаимодействие вязкоупругого слоя с шероховатым контртелом, скользящим по нему с постоянной скоростью ${{V}_{s}}$ вдоль оси $x$ (рис. 5). Предполагается, что шероховатость контртела образована множеством одинаковых неровностей трапецеидальной формы. Неровности считаются пологими, а горизонтальные части профиля контртела достаточно протяженными, так что
(4.1)
$\rho \ll 1,\quad {{t}_{r}} \ll 2{{a}_{2}}{\text{/}}{{V}_{s}},\quad {{t}_{r}} \ll {{L}_{0}}{\text{/}}{{V}_{s}}$Рис. 5.
Контактное взаимодействие вязкоупругого слоя с шероховатым контртелом, скользящим по нему с постоянной скоростью ${{V}_{s}}$.
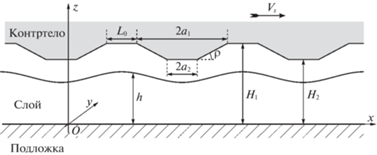
Рассмотрим вначале взаимодействие со слоем единичной неровности контртела. Для этого выберем некоторый участок слоя произвольной ширины $b$ (вдоль оси $y$) и длины $\Delta {\kern 1pt} x$ (вдоль оси $x$), причем $\Delta {\kern 1pt} x \ll {{a}_{1}} - {{a}_{2}}$, $\Delta x \ll 2{{a}_{2}}$. Принимая во внимание сделанные допущения, взаимодействие такого участка с проходящей над ним неровностью можно представить как равномерный подвод и последующий равномерный отвод поверхности контртела, которую можно считать расположенной параллельно подложке слоя (первое допущение (4.1)). Кроме того, можно считать, что после подвода/отвода поверхности контртела вязкоупругий материал слоя успевает релаксировать и прийти в стационарное состояние (второе и третье допущения (4.1)).
Подобный характер взаимодействия скользящей неровности с выбранным участком слоя вполне соответствует постановке рассмотренной выше задачи о плоскопараллельном контакте индентора с вязкоупругим слоем при наличии режимов подвода (1.12) и отвода (1.13) с линейным законом (2.9) изменения внедрения $\delta (t)$ индентора. Параметры этой задачи связаны с параметрами задачи о скольжении контртела следующими равенствами:
(4.2)
$\begin{gathered} {{\left. {\delta _{{}}^{s}} \right|}_{{{\text{app}}}}} = {{h}_{0}} - {{H}_{1}} \equiv {{\delta }_{1}},\quad {{\left. {\delta _{m}^{{}}} \right|}_{{{\text{app}}}}} = {{h}_{0}} - {{H}_{2}} \equiv {{\delta }_{2}} \\ \dot {\delta } = {{V}_{s}}\operatorname{tg} \rho = \frac{{{{\delta }_{2}} - {{\delta }_{1}}}}{{{{t}_{m}}}},\quad {{t}_{m}} = \frac{{{{a}_{1}} - {{a}_{2}}}}{{{{V}_{s}}}}, \\ \end{gathered} $С учетом вышесказанного, воспользуемся формулой (3.1) для определения диссипации энергии $\Delta {\kern 1pt} {{D}_{{{\kern 1pt} 1}}}$ на выбранном участке слоя при прохождении по нему единичной неровности, представив эту энергию в виде $\Delta {\kern 1pt} {{D}_{{{\kern 1pt} 1}}} = {{d}_{{a - s}}}{\kern 1pt} b\Delta {\kern 1pt} x$. Отсюда следует, что при прохождении неровностью пути $l$ диссипация энергии в слое на этом пути составит
Если ввести в рассмотрение силу ${{F}_{{{\kern 1pt} 1}}}$ трения неровности о слой, то по закону сохранения энергии, работа этой силы на пути $l$ должна равняться диссипации энергии, т.е. ${{F}_{{{\kern 1pt} 1}}}{\kern 1pt} l = {{D}_{{{\kern 1pt} 1}}}$. Подстановка в это равенство выражения (4.3) позволяет установить, что
Аналогичное выражение для силы трения через диссипацию энергии было получено ранее для классического вязкоупругого контакта скольжения [39].
Вернемся теперь к рассмотрению контртела с множеством неровностей. Выделим некоторый участок контртела длиной $a \gg L \equiv {{L}_{0}} + 2{{a}_{1}}$ и выбранной ранее шириной $b$, на котором располагается $N = a{\text{/}}L$ неровностей (рис. 5). В силу равенства (4.4), сила трения такого участка по слою составит $F = N{{F}_{1}}$ = $S{{L}^{{ - 1}}}{{d}_{{a - s}}}$, где $S = a{\kern 1pt} b$ – площадь выделенного участка контртела. В результате, можно найти силу трения $\bar {\tau }$, приходящуюся на единицу площади контакта (среднее напряжение трения):
Нагрузка на контртело, приходящаяся на единицу площади контакта (среднее контактное давление) определяется по формуле:
где $T = L{\text{/}}{{V}_{s}}$ – период циклических воздействий неровностей контртела на слой, $p$ – контактное давление, которое рассчитывается по известному зазору $r(t)$ с использованием формулы (1.3).Располагая величинами $\bar {\tau }$ и $\bar {p}$, можно определить коэффициент трения скольжения [40]
который имеет физический смысл при положительных значениях давления $\bar {p}$.На основе равенств (4.5), (4.6) и решения задачи о плоскопараллельном контакте индентора с вязкоупругим слоем (разд. 2 и 3), были выполнены расчеты величин $\bar {\tau }$ и $\bar {p}$ для различных значений максимального внедрения ${{\delta }_{2}}$ контртела.
Расчеты проводились при ${{a}_{1}}$ = 0.6 мкм, ${{a}_{2}}$ = 0.5 мкм, ${{g}_{m}} = 5 \times {{10}^{{{\kern 1pt} - 3}}}$ мкм, ${{L}_{{{\kern 1pt} 0}}}$ = 1 мкм, ${{V}_{s}}$ = 50 мкм/с. Величина ${{\delta }_{{{\kern 1pt} 1}}}$ определялась по формуле ${{\delta }_{{{\kern 1pt} 1}}} = {{\delta }_{{{\kern 1pt} 2}}} - {{g}_{m}}$ для каждого значения ${{\delta }_{2}}$. Значения остальных параметров принимались такими же, как в разд. 2.
На рис. 6а и б изображены зависимости силы трения $\bar {\tau }$ и давления $\bar {p}$ от внедрения ${{\delta }_{2}}$ при уточненной и традиционной постановках задачи с использованием безразмерной величины ${{\tilde {\delta }}_{2}} = {{\delta }_{2}}{\text{/}}{{h}_{{{\kern 1pt} 0}}}$. На рис. 6в показаны кривые зависимости силы трения $\bar {\tau }$ от давления $\bar {p}$, построенные на основе графиков рис. 6а и б. Каждой точке на такой кривой отвечает некоторое значение внедрения ${{\delta }_{2}}$ из указанного на рис. 6а или б диапазона, причем стрелками обозначено направление роста величины ${{\delta }_{2}}$. Отметим, что неоднозначность зависимости $\bar {\tau }(\bar {p})$ обусловлена отсутствием монотонной зависимости давления $\bar {p}$ от внедрения ${{\delta }_{2}}$ (рис. 6б).
Рис. 6.
Зависимости силы трения $\bar {\tau }$ (а) и давления $\bar {p}$ (б) от внедрения ${{\delta }_{2}}$, а также силы трения $\bar {\tau }$ от давления $\bar {p}$ (в) при ${{h}_{{{\kern 1pt} 0}}}$ = 5 нм. Сплошная/штриховая линия отвечает уточненной/традиционной постановке задачи.
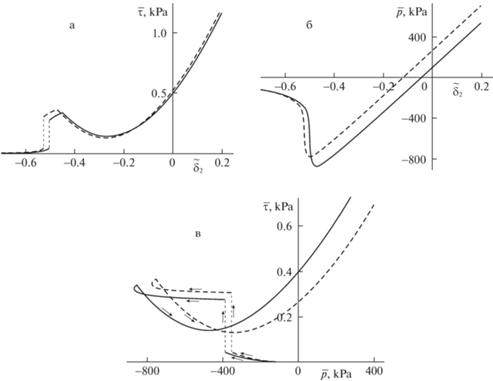
Показанные на рис. 6а зависимости $\bar {\tau }({{\delta }_{2}})$ имеют особенности в виде разрывов и изломов, причины появления которых указаны в разд. 2. В частности, разрыв происходит при ${{\delta }_{2}} = \delta _{ + }^{\infty }$ и обусловлен появлением скачка у функции $r(t)$ с резким изменением ее конечного значения ${{r}_{m}}$. Аналогичное поведение функции $r(t)$ имеет место, когда значение $\delta _{ + }^{\infty }$ принимает внедрение ${{\delta }_{{{\kern 1pt} 1}}}$. Однако, соответствующее внедрение ${{\delta }_{2}} = {{\delta }_{{{\kern 1pt} 1}}} + {{g}_{m}}$ = = $\delta _{ + }^{\infty } + {{g}_{m}}$ оказывается сравнимым с толщиной ${{h}_{{{\kern 1pt} 0}}}$ слоя, что противоречит условию малости деформаций. По этой причине, на рис. 6а дополнительные особенности зависимости $\bar {\tau }({{\delta }_{2}})$ не представлены.
Разрывы и изломы кривых зависимости силы трения $\bar {\tau }$ от давления $\bar {p}$ (рис. 6в) являются очевидным следствием наличия таких особенностей у соответствующих зависимостей $\bar {\tau }({{\delta }_{2}})$ (рис. 6а). Отметим, что ранее скачкообразное изменение силы трения при изменении нормальной нагрузки наблюдалась экспериментально для зонда атомно-силового микроскопа [41].
Как и прежде, можно утверждать, что зависимости $\bar {\tau }({{\delta }_{2}})$ и $\bar {\tau }(\bar {p})$ являются гладкими (без разрывов и изломов), если выполняется условие (2.10). Для проверки этого утверждения были выполнены расчеты при прежних значениях параметров задачи, но уменьшенной толщине слоя ${{h}_{{{\kern 1pt} 0}}}$ = 2 нм, когда имеет место неравенство (2.10). На рис. 7а и б изображены соответствующие зависимости $\bar {\tau }({{\delta }_{2}})$ и $\bar {p}({{\delta }_{2}})$, а на рис. 7в – зависимость $\bar {\tau }(\bar {p})$, которые, как и следовало ожидать, являются гладкими.
Рис. 7.
Зависимости силы трения $\bar {\tau }$ (а) и давления $\bar {p}$ (б) от внедрения ${{\delta }_{2}}$, а также силы трения $\bar {\tau }$ от давления $\bar {p}$ (в) при ${{h}_{{{\kern 1pt} 0}}}$ = 2 нм. Сплошная/штриховая линия отвечает уточненной/традиционной постановке задачи.
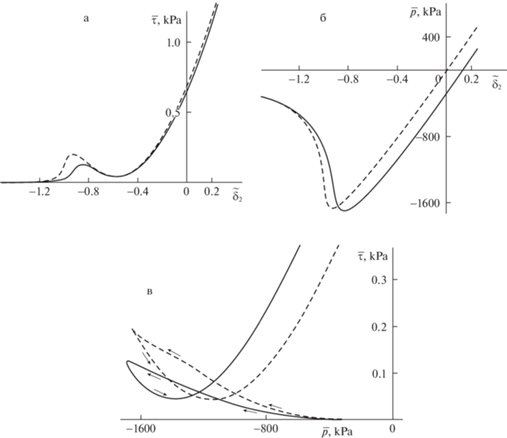
Сравнение рис. 6в и 7в указывает на то, что уменьшение толщины ${{h}_{{{\kern 1pt} 0}}}$ слоя приводит к существенному росту силы трения $\bar {\tau }$ в области больших (в частности, положительных) значений давления $\bar {p}$.
Располагая значениями силы трения $\bar {\tau }$ и давления $\bar {p}$ (рис. 6 и 7), можно выполнить оценку коэффициента трения ${{\mu }_{s}}$ по формуле (4.7). В таблице 1 приводятся значения ${{\mu }_{s}}$, полученные при давлении $\bar {p}$ = 1 МПа. Как видно, коэффициент трения в рассматриваемом случае имеет достаточно низкие значения, что отвечает режиму сверхнизкого трения [42, 43]. Обращает на себя внимание, что увеличение толщины ${{h}_{{{\kern 1pt} 0}}}$ слоя приводит к незначительному уменьшению коэффициента трения ${{\mu }_{s}}$. Использование традиционной постановки задачи вместо уточненной постановки приводит к существенному занижению оценки коэффициента трения.
Таблица 1.
Значения коэффициента трения
| Уточненная постановка задачи | Традиционная постановка задачи | |||
|---|---|---|---|---|
| ${{h}_{{{\kern 1pt} 0}}}$, нм | 2 | 5 | 2 | 5 |
| ${{\mu }_{s}} \times {{10}^{3}}$ | 2.41 | 2.25 | 1.98 | 1.76 |
Выводы
1. Выполнен расчет диссипации энергии в вязкоупругом слое в режиме подвода/отвода плоского индентора при наличии сил межмолекулярного взаимодействия (самосогласованный подход, традиционная и уточненная постановки задачи).
2. Выявлен эффект скачкообразного роста диссипации энергии ${{d}^{\infty }}$ при достижении конечным внедрением ${{\delta }_{m}}$ индентора критического значения $\delta _{ + }^{\infty }$ (рис. 2 и 4). Реализация этого эффекта зависит, в конечном счете, от упругой податливости слоя и характера межмолекулярного взаимодействия (условие (2.10)).
3. На основе решения задачи о подводе/отводе плоского индентора выполнен расчет силы трения скольжения шероховатого контртела по вязкоупругому слою в режиме бесконтактного трения. Продемонстрирована возможность скачкообразного роста силы трения при увеличении внедрения контртела.
Работа выполнена по теме государственного задания (№ госрегистрации АААА-А20-120011690132-4) и при финансовой поддержке РФФИ и БРФФИ в рамках научного проекта № 20-58-00007.
Список литературы
Derjaguin B. Untersuchungen über die Reibung und Adhäsion, IV. Theorie des Anhaftens kleiner Teilchen // Kolloid-Zeitschrift. 1934. Bd. 69. H. 2. S. 155–164.
Johnson K.L., Kendall K., Roberts A.D. Surface energy and the contact of elastic solids // Proc. Roy. Soc. Lond. Ser. A. 1971. V. 324. № 1558. P. 301–313.
Derjaguin B.V., Muller V.M., Toporov Yu.P. Effect of contact deformations on the adhesion of particles // J. Colloid Interface Sci. 1975. V. 53. № 2. P. 314–326.
Sridhar I., Johnson K.L., Fleck N.A. Adhesion mechanics of the surface force apparatus // J. Phys. D: Appl. Phys. 1997. V. 30. № 12. P. 1710–1719.
Sergici A.O., Adams G.G., Müftü S. Adhesion in the contact of a spherical indenter with a layered elastic half-space // J. Mech. Phys. Solids. 2006. V. 54. № 9. P. 1843–1861.
Reedy E.D. Thin-coating contact mechanics with adhesion // J. Mater. Res. 2006. V. 21. № 10. P. 2660–2668.
Borodich F.M., Galanov B.A., Perepelkin N.V., Prikazchikov D.A. Adhesive contact problems for a thin elastic layer: Asymptotic analysis and the JKR theory // Math. Mech. Solids. 2018. V. 24. № 5. P. 1405–1424.
Greenwood J.A., Johnson K.L. The mechanics of adhesion of viscoelastic solids // Philos. Mag. A. 1981. V. 43. № 3. P. 697–711.
Горячева И.Г., Губенко М.М., Маховская Ю.Ю. Скольжение сферического индентора по вязкоупругому основанию с учетом сил молекулярного притяжения // ПМТФ. 2014. Т. 55. № 1. С. 99–107.
Lin Y.Y., Hui C.Y. Mechanics of Contact and Adhesion between Viscoelastic Spheres: An Analysis of Hysteresis during Loading and Unloading // J. Polym. Sci. Pt. B: Polym. Phys. 2002. V. 40. P. 772–793.
Haiat G., Phan Huy M.C., Barthel E. The adhesive contact of viscoelastic spheres // J. Mech.&Phys. Solids. 2003. V. 51. № 1. P. 69–99.
Muller V.M., Yushchenko V.S., Derjaguin B.V. On the influence of molecular forces on the deformation of an elastic sphere and its sticking to a rigid plane // J. Coll. Interface Sci. 1980. V. 77. № 1. P. 91–101.
Attard P., Parker J.L. Deformation and adhesion of elastic bodies in contact // Phys. Rev. A. 1992. V. 46. № 12. P. 7959–7971.
Greenwood J.A. Adhesion of elastic spheres // Proc. R. Soc. Lond. A. 1997. V. 453. № 1961. P. 1277–1297.
Солдатенков И.А. Применение метода последовательных приближений к расчету упругого контакта при наличии молекулярной адгезии // ПММ. 2012. Т. 76. Вып. 5. С. 734–743.
McMeeking R.M. A Maxwell stress for material interactions // J. Colloid Interface Sci. 1998. V. 199. № 2. P. 187–196.
Sauer R.A., Li S. A contact mechanics model for quasi-continua // Int. J. Numer. Meth. Engng. 2007. V. 71. № 8. P. 931–962.
He L.H. Stress and deformation in soft elastic bodies due to intermolecular forces // J. Mech. Phys. Solids. 2013. V. 61. № 6. P. 1377–1390.
Солдатенков И.А. Контактная задача при объемном приложении сил межмолекулярного взаимодействия (уточненная постановка) // ПММ. 2013. Т. 77. Вып. 6. С. 877–893.
Dolgov N.A., Romashin S.N., Frolenkova L.Yu., Shorkin V.S. A model of contact of elastic bodies with account for their adhesion // Int. J. Nanomech. Sci.&Technol. 2015. V. 6. № 2. P. 117–133.
Overbeek J.T.G., Sparnaay M.J. Classical coagulation. London-van der Waals attraction between macroscopic objects // Discuss. Faraday Soc. 1954. V. 18. P. 12–24.
Wu J.-J. The jump-to-contact distance in atomic force microscopy measurement // J. Adhesion. 2010. V. 86. № 11. P. 1071–1085.
Teodorovich E.V. On the contribution of macroscopic van der Waals interactions to frictional force // Proc. R. Soc. Lond. A. 1978. V. 362. P. 71–77.
Sokoloff J.B. Theory of energy dissipation in sliding crystal surfaces // Rhys. Rev. B. 1990. V. 42. № 11. P. 760–765.
Persson B.N.J., Zhang Z. Theory of friction: Coulomb drag between two closely spaced solids // Rhys. Rev. B. 1998. V. 57. № 12. P. 7327–7334.
Popov V.L. Electronic and phononic friction of solids at low temperatures // Tribol. Int. 2001. V. 34. P. 277–286.
Волокитин А.И., Перссон Б.Н.Дж. Радиационная передача тепла и бесконтактное трение между наноструктурами // УФН. 2007. Т. 177. № 9. С. 921–951.
Солдатенков И.А. Контакт с межмолекулярным взаимодействием для вязкоупругого слоя (самосогласованный подход): расчет НДС и диссипации энергии // ПММ. 2020. Т. 84. № 1. С. 102–121.
Солдатенков И.А. Контакт с межмолекулярным взаимодействием для вязкоупругого слоя (самосогласованный подход): анализ особенностей процесса подвода/отвода индентора // ПММ. 2021. Т. 85. № 1. С. 44–65.
Kaplan I.G. Intermolecular Interactions: Physical Picture, Computational Methods and Model Potentials. Chichester: Wiley, 2006.
Israelachvili J.N. Intermolecular and Surface Forces. London: Academic, 2011.
Кристенсен Р. Введение в теорию вязкоупругости. М.: Мир, 1974. 338 с.
Огибалов П.М., Ломакин В.А., Кишкин Б.П. Механика полимеров. М.: Изд-во Московского ун-та, 1975. 528 с.
Адамов А.А., Матвеенко В.П., Труфанов Н.А., Шардаков И.Н. Методы прикладной вязкоупругости. Екатеринбург: УрО РАН, 2003. 411 с.
Фихтенгольц Г.М. Курс дифференциального и интегрального исчисления (в 3-х томах). М.: Физматлит, 2003. Т. 1. 680 с. Т. 3. 728 с.
Калиткин Н.Н. Численные методы. СПб.: БХВ-Петербург, 2011. 586 с.
Хан Х. Теория упругости. М.: Мир, 1988. 343 с.
Ферри Дж. Вязкоупругие свойства полимеров. М.: Изд-во иностр. лит., 1963. 535 с.
Солдатенков И.А. К расчету деформационной составляющей силы трения для стандартного вязкоупругого основания // Трение и износ. 2008. Т. 29. № 1. С. 12–21.
Крагельский И.В., Добычин М.Н., Комбалов В.С. Основы расчетов на трение и износ. М.: Машиностроение, 1977. 526 с.
Wang Y., Wang J. Friction determination by atomic force microscopy in field of biochemical science // Micromachines. 2018. V. 9. № 7. 313.
Deng Z., Smolyanitsky A., Li Q., Feng X.Q., Rachel J., Cannara R.J. Adhesion-dependent negative friction coefficient on chemically modified graphite at the nanoscale // Nature Mater. 2012. V. 11. P. 1032–1037.
Baykara M.Z., Vazirisereshk M.R., Martini A. Emerging superlubricity: A review of the state of the art and perspectives on future research // Appl. Phys. Rev. 2018. V. 5. № 4. 041102.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика