

Радиотехника и электроника, 2022, T. 67, № 11, стр. 1103-1109
Оценивание координат в трехпозиционной радиосистеме с учетом выравнивания погрешности определения местоположения объекта по траектории его перемещения
А. Ф. Котов a, Е. А. Чистяков a, *
a МИРЭА – Российский технологический университет
119454 Москва, просп. Вернадского, 78, Российская Федерация
* E-mail: egorka199861@gmail.com
Поступила в редакцию 02.02.2022
После доработки 27.03.2022
Принята к публикации 28.03.2022
- EDN: UWXGXM
- DOI: 10.31857/S0033849422110067
Аннотация
Рассмотрен вопрос об оптимизации процедуры оценивания местоположения малоразмерного малоподвижного объекта наблюдения (например, квадрокоптера) при его перемещении относительно расположения охранной трехпозиционной радиолокационной системы, что позволяет повысить точность оценивания его координат при изменении расстояния между ним и радиолокационной системой.
ВВЕДЕНИЕ
В [1] представлены алгоритмы оценивания вектора состояния малоразмерного объекта наблюдения в охранных однопозиционных и многопозиционных радиолокационных системах (РЛС). При этом по мере изменения расстояния между объектом наблюдения и РЛС погрешность измерения координат объекта наблюдения меняется, увеличиваясь с ростом дальности до объекта. В данной работе предложена модернизация разработанных в [1] алгоритмов, что позволило уменьшить изменение погрешности измерения координат малоразмерных объектов наблюдения по мере их перемещения относительно РЛС.
В работе рассмотрен пример подобной модернизации алгоритмов, используемых для наблюдения за малоразмерным объектом в трехпозиционной РЛС, однако предлагаемый подход может быть использован и при применении других типов трехкоординатных РЛС.
При модернизации алгоритмов авторы исходили из условий, аналогичных условиям, принятым в [1], т.е. в качестве объектов наблюдения рассмотрены квадрокоптеры – беспилотные летающие аппараты, обладающие повышенной маневренностью и малыми размерами, в качестве РЛС – охранная радиосистема, действующая на малой дальности и использующая большое количество импульсов на фиксированном интервале наблюдения. В качестве алгоритмов оценивания рассмотрены алгоритмы: α−β–$\gamma $, алгоритм Калмана и модифицированный нелинейный алгоритм [1] (далее – нелинейная фильтрация). Математическая модель беспилотного объекта наблюдения, основные параметры моделирования и критерии качества оценивания аналогичны принятым в [1].
1. СТРУКТУРНОЕ ПОСТРОЕНИЕ ТРЕХПОЗИЦИОННОЙ ДАЛЬНОМЕРНОЙ РАДИОСИСТЕМЫ
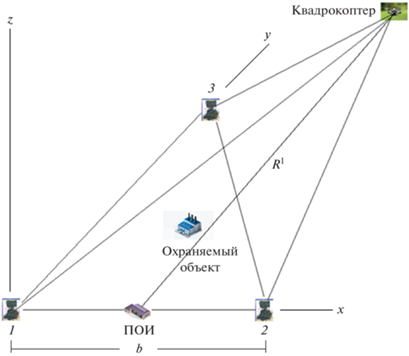
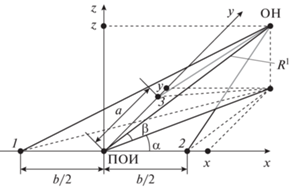
Пусть имеется охранный объект и требуется обеспечить его радиолокационную охрану. Одним из вариантов территориального построения РЛС может быть структура, показанная на рис. 1. Позиции РЛС находятся в точках 1, 2, 3, соответствующих вершинам равностороннего треугольника, со стороной (базой), равной b (рис. 2), в центре которого расположен охраняемый объект, а пункт обработки информации (ПОИ) располагается посредине между первой и второй позицией. Точки 1 и 2 расположены на оси х симметрично относительно начала координат, точка 3 – на оси y на расстоянии а от начала координат (а = = b$\sqrt 3 $/2). Угловое положение объекта наблюдения определяется азимутом α и углом места β. На позициях расположены идентичные однопозиционные дальномеры, измеряющие временные задержки распространения радиосигналов $~{{\tau }_{1}}$, ${{\tau }_{2}}$, ${{\tau }_{3}}$ от позиций до объекта наблюдения и обратно до позиций, а в ПОИ определяются координаты объекта наблюдения в прямоугольной декартовой системе координат [1]. Полагается, что отношение дальности к базе R1/b порядка единицы, а привязка позиций обеспечена геодезическим способом, что позволяет считать погрешность привязки ничтожной.
2. АЛГОРИТМЫ ОЦЕНИВАНИЯ
2.1. Оценивание местоположения по одному импульсу
Рассмотрим алгоритмы оценивания, представленные в работе [1]. Были измерены временные задержки t1, t2,t3 распространения сигналов от дальномеров до объекта наблюдения и обратно, связанные с расстояниями от дальномеров до объекта наблюдения R1, R2, R3 соотношением
где i – номер дальномера, ti – временная задержка распространения сигнала от i-го дальномера до объекта наблюдения и обратно, Ri – расстояние от объекта наблюдения до i-го дальномера, с – скорость распространения радиоволн. Уравнение состояния объекта наблюдения, характеризующее его перемещение, имеет вид(2)
$\widehat {\vec {\Lambda }}_{{{\text{од}}.{\text{имп}}.}}^{{\left( v \right)}} = {{\vec {\Lambda }}^{{\left( v \right)}}} + {\mathbf{\Sigma }}\vec {N}_{\Sigma }^{{\left( v \right)}},$Уравнение наблюдения для дальномера определяется формулой
(3)
${{y}_{i}}\left( t \right) = {{u}_{{{\text{с}}i}}}\left( t \right) + {{u}_{{{\text{ш}}i}}}\left( t \right),$Если считать, что дальномеры идентичны и что значения угла α (см. рис. 2) лежат в пределах 15°–70° и –15°–70°, то можно получить погрешность определения местоположения объекта наблюдения ${{\sigma }_{\lambda }}$ (с учетом систематической составляющей, обусловленной особенностями геометрического построения РЛС и расположением объекта наблюдения относительно ее позиций) не более $\sqrt 3 {\kern 1pt} {{\sigma }_{q}}$ [2], т.е.
(5)
${{\sigma }_{q}} = \sqrt {\sigma _{{\text{ш}}}^{2} + \sigma _{{\text{ф}}}^{2} + \sigma _{{{\text{распр}}}}^{2}} ,$(7)
${{{{\sigma }}}_{{R{\text{пот}}}}} = с{\text{/}}2\Delta {{f}_{{{\text{э}}{\text{.с}}}}}\sqrt {2E{\text{/}}{{N}_{0}}} .$Предположим, что b = 300 м, $\Delta {{f}_{{{\text{э}}{\text{.с}}}}}$ = 109 Гц и $2Е{\text{/}}{{N}_{0}}$ = 10, тогда погрешность ${{{{\sigma }}}_{{R{\text{пот}}}}} = 0.047$ м, а погрешность для случаев R1/b = 1 и R1/b > 1 равна соответственно
2.2. Фильтрация α–β–$\gamma $
Одним из алгоритмов фильтрации α–β–γ является алгоритм [1], представленный формулами
(10)
$\hat {q}_{{\alpha - \beta - \gamma }}^{{(v)}} = \hat {q}_{{э.\alpha - \beta - \gamma }}^{{(v)}} + \alpha (\hat {q}_{{од.имп.}}^{{(v)}} - \hat {q}_{{э.\alpha - \beta - \gamma }}^{{(v)}}),$(11)
$\hat {V}_{{{{q}_{{\alpha - \beta - \gamma }}}}}^{{(v)}} = \hat {V}_{{э.{{q}_{{\alpha - \beta - \gamma }}}}}^{{(v)}} + \frac{\beta }{Т}(\hat {q}_{{од.имп.}}^{{(v)}} - \hat {q}_{{э.\alpha - \beta - \gamma }}^{{(\nu )}}),$(12)
$~\hat {а}_{{{{q}_{{\alpha - \beta - \gamma }}}}}^{{(v)}} = \hat {а}_{{э.{{q}_{{\alpha - \beta - \gamma }}}}}^{{(v)}} + \frac{\gamma }{{2Т}}(\hat {q}_{{од.имп.}}^{{(v)}} - \hat {q}_{{э.\alpha - \beta - \gamma }}^{{(v)}}).$2.3. Фильтрация Калмана
Рассмотрим алгоритм Калмана [1], представленный следующими соотношениями:
(13)
$\widehat {\vec {\Lambda }}_{{\text{К}}}^{{\left( v \right)}} = \widehat {\vec {\Lambda }}_{{{\text{э}}{\text{.К}}}}^{{\left( v \right)}} + {\mathbf{K}}_{{\text{К}}}^{{\left( v \right)}}\left[ {\widehat {\vec {\Lambda }}_{{{\text{од}}.{\text{имп}}.}}^{{\left( v \right)}} - \widehat {\vec {\Lambda }}_{{{\text{э}}{\text{.К}}}}^{{\left( v \right)}}} \right],$
 – экстраполяционная ковариационная матрица; ${{{\mathbf{W}}}_{{\lambda q}}}$ – матрица частных производных компонентов вектора состояния по компонентам вектора
первичных параметров; ${{\vec {Q}}_{{{\text{э}}{\text{.К}}}}}$ – вектор экстраполяционных значений первичных параметров (пеленгов, временных задержек,
доплеровских частот). ^T – знак транспонирования.
– экстраполяционная ковариационная матрица; ${{{\mathbf{W}}}_{{\lambda q}}}$ – матрица частных производных компонентов вектора состояния по компонентам вектора
первичных параметров; ${{\vec {Q}}_{{{\text{э}}{\text{.К}}}}}$ – вектор экстраполяционных значений первичных параметров (пеленгов, временных задержек,
доплеровских частот). ^T – знак транспонирования.
В конце каждой итерации происходит вычисление ковариационной матрицы для данного алгоритма Калмана:
(15)
${\mathbf{K}}_{{{{\lambda К}}}}^{{\left( v \right)}} = \left[ {{\mathbf{I}} - {\mathbf{K}}_{{\text{К}}}^{{\left( v \right)}}} \right]{\mathbf{K}}_{{{\text{э}}{\text{.К}}}}^{{\left( v \right)}}.$Экстраполяционные значения могут быть вычислены по следующим формулам:
(16)
$\widehat {\vec {\Lambda }}_{{{\text{э}}{\text{.К}}}}^{{\left( v \right)}} = {\mathbf{\Phi }}\widehat {\vec {\Lambda }}_{{\text{К}}}^{{\left( {v - 1} \right)}},$
Здесь Ф – матрица перехода, B – матрица диффузии.
2.4. Алгоритм нелинейной фильтрации
Уравнения фильтрации согласно [3] имеют вид
(18)
$\left\{ {\begin{array}{*{20}{c}} {\widehat {\vec {\Lambda }}_{{ps}}^{{\left( v \right)}} = \Lambda _{{\text{э}}}^{{\left( v \right)}} + {\mathbf{K}}_{{ps}}^{{\left( v \right)}}\vec {G}_{\lambda }^{{\left( v \right)}},} \\ {{\mathbf{K}}_{{ps}}^{{\left( v \right)}} = \left[ {{{{\left( {{\mathbf{K}}_{{\text{э}}}^{{\left( v \right)}}} \right)}}^{{ - 1}}} - {\mathbf{H}}_{\lambda }^{{\left( v \right)}}} \right],} \end{array}} \right.$(19)
$\vec {G}_{\lambda }^{{\left( v \right)}} = {\mathbf{W}}_{{q\lambda }}^{T}{\mathbf{K}}_{q}^{{ - 1}}\left[ {\widehat {\vec {Q}}_{{{\text{мп}}}}^{{\left( v \right)}} - \vec {Q}\left( {\Lambda _{{\text{э}}}^{{\left( v \right)}}} \right)} \right].$(20)
${\mathbf{K}}_{{\text{э}}}^{{\left( v \right)}} = {\mathbf{K}}_{{ps}}^{{\left( {v - 1} \right)}} + {\mathbf{B}}{{{\mathbf{B}}}^{T}},$Элементы матрицы ${\mathbf{H}}_{\lambda }^{{\left( {v} \right)}}$ могут быть получены по следующим формулам [4]:
(21)
$\begin{gathered} \frac{{{{\partial }^{2}}F}}{{\partial {{\lambda }_{i}}{{\lambda }_{k}}}} = \\ = \mathop \sum \limits_{j = 1}^{{{m}_{q}}} \mathop \sum \limits_{\mu = 1}^{{{m}_{q}}} h_{{j\mu }}^{{\left( v \right)}}\left\{ {\frac{{{{\partial }^{2}}{{q}_{j}}}}{{\partial {{\lambda }_{j}}{{\lambda }_{k}}}}\left[ {{{q}_{\mu }}\left( {\vec {\Lambda }_{э}^{{\left( v \right)}} - \hat {q}_{\mu }^{{\left( v \right)}}} \right)} \right] + \frac{{\partial {{q}_{j}}}}{{\partial {{\lambda }_{j}}}}\frac{{\partial {{q}_{\mu }}}}{{\partial {{\lambda }_{k}}}}} \right\}, \\ \end{gathered} $2.5. Критерий качества оценки и фильтрации
В качестве простейшего критерия качества может быть взята точечная погрешность по каждой координате в декартовом пространстве [3]:
(22)
$\begin{array}{*{20}{c}} {e_{x}^{{\left( v \right)}} = {{x}^{{\left( v \right)}}} - \hat {x}_{{\text{ф}}}^{{\left( v \right)}},} \\ {e_{y}^{{\left( v \right)}} = {{y}^{{\left( v \right)}}} - \hat {y}_{{\text{ф}}}^{{\left( v \right)}},} \\ {e_{z}^{{\left( v \right)}} = {{z}^{{\left( v \right)}}} - \hat {z}_{{\text{ф}}}^{{\left( v \right)}},} \end{array}$Для обобщенной оценки погрешности фильтрации по трем координатам можно рассматривать расстояние между истинными значениями координат и значениями на выходе измерителя:
(23)
${{d}^{{\left( v \right)}}} = \sqrt {{{{\left( {{{x}^{{\left( v \right)}}} - \hat {x}_{{\text{ф}}}^{{\left( v \right)}}} \right)}}^{2}} + {{{\left( {{{y}^{{\left( v \right)}}} - \hat {y}_{{\text{ф}}}^{{\left( v \right)}}} \right)}}^{2}} + {{{\left( {{{z}^{{\left( v \right)}}} - \hat {z}_{{\text{ф}}}^{{\left( v \right)}}} \right)}}^{2}}} .$Ввиду того, что величина (23) является случайной, для численной оценки качества фильтрации может быть взято исправленное выборочное СКО
(24)
${{\sigma }_{d}} = \sqrt {\frac{1}{{n - 1}}\mathop \sum \limits_{v = 1}^n {{{\left( {{{d}^{{\left( v \right)}}} - \bar {d}} \right)}}^{2}}} ,$3. МОДЕЛИРОВАНИЕ С МОДЕРНИЗАЦИЕЙ АЛГОРИТМОВ
Ниже проводится моделирование с модернизацией алгоритмов, рассмотренных в [1].
На рис. 3 представлена зависимость СКО погрешности (обусловленной внутренними шумами дальномеров) различных вариантов оценивания в зависимости от дальности R1 – расстояния между ПОИ и ОН для устройства обработки информации охранной трехпозиционной дальномерной радиосистемы, полученная в [1]. Параметр R1 менялся от 500 до 5000 м. Уменьшение СКО погрешности при использовании алгоритма Калмана и нелинейного алгоритма по сравнению с оцениванием по одиночному импульсу практически одно и то же: уменьшение СКО погрешности составляет в среднем в 7.6 раза. Это, безусловно, положительный результат, однако имеет место неравномерность погрешности при движении объекта, т.е. ее неодинаковость при изменении расстояния между объектом и РЛС. Эта неравномерность обусловлена уменьшением энергии зондирующего сигнала с увеличением дальности до объекта при неизменном значении спектральной плотности внутреннего шума приемников позиций.
Рис. 3.
Зависимость СКО флуктуационной составляющей погрешности оценивания от дальности R1 для охранной трехпозиционной дальномерной радиосистемы при неизменных форме и энергии радиосигнала, полученная в [1]: 1 – оценивание по одиночному импульсу, 2 – α–β-фильтрация, 3 – фильтрация Калмана, 4 – нелинейная фильтрация.
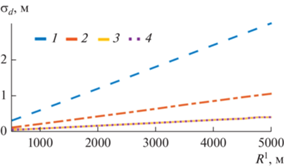
Анализируя графики изменения СКО погрешности с использованием фильтрации Калмана и нелинейного фильтра в зависимости от дальности (см. рис. 3), видим, что при количестве реализаций и импульсов, равных 1000, погрешность при росте R1 увеличивается примерно в 10 раз, что может оказаться неприемлемым для практики. Было проведено исследование влияния количества импульсов в сигнале на интервале наблюдения и количества реализаций, используемых в процессе обработки на погрешность оценивания местоположения объекта наблюдения. По результатам исследования была построена табл. 1, по данным которой был построен график на рис. 4.
Таблица 1.
Зависимость СКО флуктуационной составляющей погрешности различных типов оценивания от количества импульсов в зондирующем сигнале при различном количестве реализаций
| Количество импульсов | Фильтр Калмана | Нелинейный фильтр | ||
|---|---|---|---|---|
| Количество реализаций 10 | ||||
| dmin, R1 = 0 | dmax, R1 = 5 км | dmin, R1 = 0 | dmax, R1 = 5 км | |
| 10 | 0.723 | 1.54 | 0.719 | 1.57 |
| 100 | 0.582 | 1.004 | 0.581 | 1.008 |
| 1000 | 1.637 | 4.42 | 1.637 | 4.44 |
| 10 000 | 0.518 | 1.94 | 0.518 | 1.92 |
| Количество реализаций 1000 | ||||
| 10 | 0.174 | 1.703 | 0.177 | 1.706 |
| 100 | 0.091 | 0.99 | 0.107 | 1.00 |
| 1000 | 0.041 | 0.445 | 0.042 | 0.445 |
| 10 000 | 0.0186 | 0.199 | 0.0186 | 0.199 |
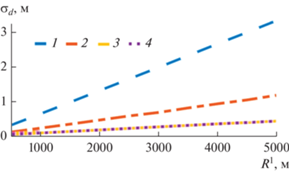
Рис. 4.
Зависимость СКО флуктуационной составляющей погрешности оценивания от дальности R1 для охранной трехпозиционной дальномерной радиосистемы при неизменных форме и энергии радиосигнала с учeтом проведенного авторами исследования: 1 – оценивание по одному импульсу, 2 – α–β-фильтрация, 3 – фильтрация Калмана, 4 – нелинейная фильтрация.
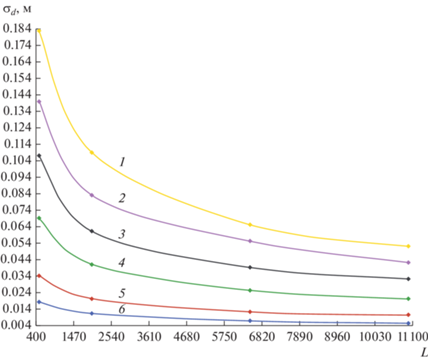
Был также построен график зависимости СКО погрешности от количества излучаемых импульсов в зондирующем сигнале (рис. 5). На основе представленных в табл. 1 данных, а также по результатам анализа построенного графика было выяснено, что для снижения СКО погрешности при изменении расстояния от цели до ПОИ необходимо изменять энергию и форму зондирующего сигнала.
Рис. 5.
Зависимость СКО флуктуационной составляющей погрешности оценивания от количества излучаемых импульсов при R1 = 1000 (1), 900 (2), 800 (3), 700 (4), 600 (5) и 500 м (6).
Дальнейшие исследования показали, что такая задача может быть решена. Для этого следовало указанные выше алгоритмы модернизировать. Модернизация алгоритмов заключалась в следующем: все указанные выше соотношения, характеризующие алгоритмы, оставались прежними, менялись лишь формулы (1) и (2), которые приняли соответственно вид.
(25)
${{{{\sigma }}}_{{R{\text{пот}}}}} = с{\text{/}}2\Delta {{f}_{{{\text{э}}{\text{.с}}}}}\sqrt {2kE{\text{/}}{{N}_{0}}} ,$(26)
$y\left( t \right) = F\left\{ {{{u}_{c}}\left( t \right)} \right\} + {{u}_{{\text{ш}}}}\left( t \right),$Итак, с использованием модернизированных алгоритмов и согласно полученной программе, результаты снижения СКО погрешности оценивания, обусловленной флуктуациями, представлены в табл. 2 и на рис. 6. Получить погрешность ${{\sigma }_{{\lambda ~}}}$ с учeтом систематической погрешности можно (считая, что дальномеры идентичны и что значения угла α (см. рис. 2) лежат в пределах 15°–70° и –15°–70°) с использованием формул ${{\sigma }_{\lambda }}$ = ${{\sigma }_{d}}\sqrt 3 ~$ для случая R1/b = 1 и ${{\sigma }_{\lambda }}{\text{ = (}}{{R}^{{\text{1}}}}{\text{/}}b{\text{)}}\sqrt {\text{3}} {\text{\;}}{{{{\sigma }}}_{d}}$ для случая R1/b $ > 1$. При этом полагалось, что объект наблюдения согласно принятой модели для вектора состояния объекта наблюдения в виде
(27)
${{\overrightarrow {~\Lambda } }^{{\left( v \right)}}} = \Phi {{\vec {\Lambda }}^{{\left( {v - 1} \right)}}} + B{{\vec {N}}^{{\left( v \right)}}},$
ЗАКЛЮЧЕНИЕ
Таким образом, полученные в работе [1] алгоритмы Калмана и нелинейной фильтрации доработаны и позволяют при принятых (указанных выше) условиях практически снизить флуктуационную составляющую погрешности ${{\sigma }_{d}}$ (а при соответствующем выборе параметра k и оператора F и погрешность ${{\sigma }_{\lambda }})$ определения координат малоразмерного объекта наблюдения (например, квадрокоптера) при его медленном перемещении относительно охранной трeхпозиционной дальномерной РЛС до значений, соответствующих минимальной дальности. При этом сохранены выигрыши в точности, полученные с применением алгоритмов фильтрации [1] по сравнению с оцениванием по одному импульсу, а также улучшены оценки координат объекта наблюдения с использованием модернизированных алгоритмов Калмана и нелинейной фильтрации при его удалении от РЛС. Например, при увеличении дальности до объекта в два раза может быть достигнуто уменьшение погрешности примерно в четыре раза по сравнению с погрешностью, получаемой при использовании не модернизированных алгоритмов [1]. Указанные дополнительные выигрыши в точности получены за счет программного и аппаратного усложнения радиоаппаратуры и обусловлены необходимостью изменять форму и энергию зондирующего сигнала.
При большем изменении дальности по сравнению с изменением, принятом при моделировании, и соответствующем изменении формы и энергии сигнала можно получить большее по сравнению с приведенным выше снижение погрешности, но при этом надо понимать, что трудности с практической реализацией алгоритмов будут возрастать, а также будет возрастать стоимость РЛС.
Авторы заявляют об отсутствии конфликта интересов.
Список литературы
Заикин Б.А. Разработка и исследования перспективных алгоритмов оценивания параметров воздушного объекта в однопозиционной и многопозиционных радиолокационных системах. Дис. … канд. техн. наук. М.: РТУ МИРЭА, 2019. 214 с.
Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь, 1986.
Радиоэлектронные системы: Основы построения и теория. Справочник. 2-е изд. / Под ред. Я.Д. Ширмана. М.: Радиотехника, 2007.
Гребенников В.Б., Котов А.Ф. // Радиотехника. 1987. № 6. С. 6.
Дополнительные материалы отсутствуют.
Инструменты
Радиотехника и электроника