

Известия РАН. Теория и системы управления, 2023, № 4, стр. 105-120
ОПЕРАТИВНОЕ ЦЕЛЕПОЛАГАНИЕ В ИЕРАРХИЧЕСКИХ ГРУППАХ АКТИВНЫХ ОБЪЕКТОВ. I. ВЫДЕЛЕННАЯ ГРУППА
С. К. Галиханов a, *, Б. Е. Федунов b, **, Н. Д. Юневич b, *
a МАИ (национальный исследовательский ун-т)
Москва, Россия
b ФАУ “ГосНИИАС”
Москва, Россия
* E-mail: galikbwat@gmail.com
** E-mail: boris_fed@gosniias.ru
* E-mail: galikbwat@gmail.com
Поступила в редакцию 30.06.2022
После доработки 18.11.2022
Принята к публикации 06.02.2023
- EDN: EUKMBU
- DOI: 10.31857/S0002338823030046
Аннотация
Статья посвящена проблематике оперативного целеполагания в иерархических группах активных (антропоцентрических) объектов, под которыми авторы понимают, прежде всего, группы летательных аппаратов, объединенные начальными и ситуационно возникающими миссиями. Перед началом функционирования группа объектов получает задание на миссию. При выполнении группой заданной миссии в целенаправленно или пассивно противодействующей среде возникает коллизия “Выполняемый этап миссии – Непосредственная угроза выполнению миссии”. Это заставляет группу решать задачу оперативного целеполагания. Создана методология решения таких задач, которая предусматривает: проведение системного анализа предметной области для выявления состава и взаимодействия необходимых для решения этих задач бортовых интеллектуальных систем тактического уровня; наличие раннее разработанных предметно независимых обликов баз знаний выявленных интеллектуальных систем; насыщение баз знаний этих систем конкретикой (выполняемой миссии, возникшей угрозы и конкретикой имеющихся в наличии на объектах средств противодействия ей). Полученное решение задачи оперативного целеполагания на беспилотных объектах сразу отправляется на реализацию, а на объектах, имеющих экипаж, решение реализуется только при его согласии. Приводится иллюстративный пример решения практически значимой задачи оперативного целеполагания в авиационной проблематике.
Введение. Иерархически упорядоченная группа обитаемых активных объектов (антропоцентрических объектов [1]) состоит из объектов, каждый из которых имеет бортовые измерительные системы, кабину экипажа с информационно-управляющим полем (ИУП), бортовые цифровые вычислительные машины (БЦВМ), бортовые исполнительные системы, системы связи между объектами группы. Предполагается, что бортовые системы объектов и их экипажа полностью дееспособны.
Группа получает перед началом функционирования миссию, которая будет исполняться в агрессивной внешней среде. При возникновении на этапе миссии коллизии “Выполняемый этап миссии – Непосредственная угроза выполнению миссии” у группы встает задача оперативного целеполагания, т.е. каким способом выполнять заданную миссию при появлении непосредственной угрозы ее выполнению. Эту задачу можно решить, отвлекая от выполнения миссии: а) всю группу, б) часть группы (выделенная группа), в) или решать ее в рамках выполняемого этапа миссии, нагружая отдельных членов группы дополнительными обязанностями. В альтернативах а) и б) соответственно группа или выделенная группа должны выполнять новую миссию “Противодействовать возникшей угрозе” и после этого они обязаны вернуться к выполнению прерванной миссии. В случае альтернативы в) в выполняемом этапе миссии в задании на ее выполнение предусматривается проблемная субситуация, в рамках которой группа противодействует угрозе, не прерывая выполнение текущего этапа миссии. Обоснованный выбор альтернативы противодействия угрозе выполняют бортовые интеллектуальные системы тактического уровня (БИС-ТУ), реализованные в БЦВМ. Альтернатива в) рассмотрена ниже; альтернатива б) обсуждается в этой статье, а альтернативе а) будет посвящена следующая публикация.
В разд. 1 описана предметная область: иерархия группы; условия, в которых у группы возникают задачи оперативного целеполагания; выявлен состав и взаимодействие тех БИС-ТУ, которые необходимы для решения возникающих у группы задач оперативного целеполагания.
В разд. 2 представлен предметно независимый облик баз знаний БИС-ТУ из упомянутого в разд. I их состава. В разд. 3 для конкретной предметной области показано, как предметно независимый облик баз знаний упомянутых БИС-ТУ (разд. 2) используется при конструировании баз знаний бортовых оперативно советующих экспертных систем, решающих задачи оперативного целеполагания в иерархической группе активных объектов, которая действует в этой конкретной предметной области.
1. Описание предметной области: системный анализ. Рассматривается иерархическая группа активных объектов, каждый из которых имеет экипаж. Руководителю группы РГ-I подчиняются несколько руководителей подгрупп РГ-II, подгруппы которых составляют группу РГ-I.
Перед началом функционирования группе выдается задание на миссию (обозначим ее как миссия-1), включающее в себя конструктивное описание:
генеральной цели миссии,
последовательности этапов достижения генеральной цели миссии,
перечень ожидаемых при выполнении миссии коллизий “Выполняемый этап миссии – Непосредственная угроза выполнению этапа/миссии” (далее в ряде случаев используем сокращенную запись: коллизия “Этап миссии – Угроза”).
Для каждого этапа миссии оговорена его цель, способ ее достижения, выделены те проблемные субситуации, появление которых связано с возникновением на этом этапе таких возможных коллизий, которым можно противостоять, не прерывая выполнение этапа миссии.
Появившаяся в процессе выполнения миссии коллизия требует от руководителя группы РГ-I решение задачи оперативного целеполагания: как противодействовать непосредственной угрозе [1]. Для решения этой задачи РГ-I должен оперативно выбрать одно из трех возможных альтернатив противодействия угрозе:
противодействовать всей группой активных объектов, прекратив выполнение группой текущего этапа миссии-1 и назначив для группы новую миссию-2 “Противодействие угрозе”,
противодействовать подгруппой группы (далее выделенная группа), определив ее состав, ее руководителя РГ-II и назначив для нее миссию-3 “Противодействие угрозе”, которую выделенная группа будет выполнять автономно (при этом остальная часть группы активных объектов будет продолжать выполнять текущий этап миссии-1),
организовать противодействие угрозе в рамках предусмотренной (в задании на миссию-1) для выполняемого этапа миссии проблемной субситуации противодействия этому типу угроз, продолжая выполнение всей группой текущего этапа миссии-1.
При завершении группой выполнения миссии-2, а выделенной группой – миссии-3 группы должны вернуться к выполнению миссии-1. Следует отметить, что миссия-1 разрабатывается до начала процесса функционирования группы активных объектов, а миссия-2 и миссия-3 должны оперативно конструироваться на борту РГ-I.
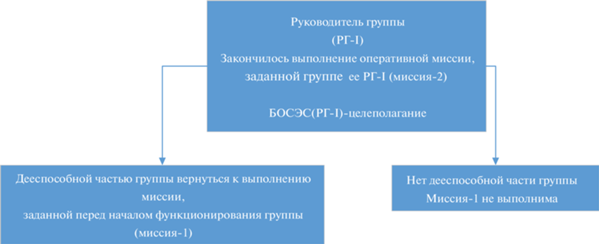
На рис. 1 показаны варианты решения задачи оперативного целеполагания руководителем группы активных объектов, выполняющих автономно некоторую заданную группе миссию.

Остановимся на выполнении миссии-2 группой, которой, напомним, руководит РГ-I. В процессе выполнения этой миссии могут возникать коллизии (а значит, и соответствующие им задачи оперативного целеполагания), которым РГ-I будет противодействовать одной из описанных выше альтернатив (рис. 1).
При завершении миссии-2 у РГ-I возникает особая коллизия “Закончена миссия-2 – Что делать дальше?”. В рассматриваемом случае ответ на этот вопрос очевидный – вернуться к выполнению прерванной миссии-1, если осталась дееспособной хотя бы часть группы. Решение возникшей при этом задачи оперативного целеполагания следующее: выбор альтернативы/прецедента возврата группы к выполнению миссии-1 принимает РГ-I (рис. 2).
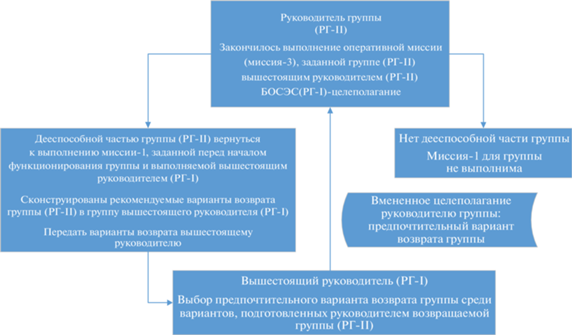
Рис. 2.
Задача целеполагания при завершении/окончании группой оперативно назначенной миссии-2. Случай: миссия-2 назначена самим руководителем группы
Несколько сложнее ситуация у РГ-II выделенной группы. При выполнении выделенной группой миссии-3 она полностью самостоятельна. В процессе выполнения миссии-3 у РГ-II могут возникать коллизии (а значит, и соответствующие им задачи оперативного целеполагания), которым РГ-II будет противостоять способом, описанным выше для РГ-I. Но при завершении миссии-3 у РГ-II также возникает особая коллизия “Закончена миссия-3 – Что делать дальше?”, которая отличается следующим.
Выделенная группа РГ-II после выполнения миссии-3 должна вернуться (своей дееспособной частью) в группу, которой руководит РГ-I и которая выполняет миссию-1 (рис. 3). Не зная текущую ситуацию у РГ-I, руководитель РГ-II должен согласовать с РГ-I приемлемый им способ возвращения выделенной группы РГ-II в группу РГ-I. Решение задачи оперативного целеполагания у РГ-II производится совместно с РГ-I. При этом РГ-II генерирует возможные варианты возврата своей группы, а РГ-I выбирает среди них приемлемый для него вариант и пересылает его РГ-II для реализации. Назовем такое решение РГ-II возникшей у него задачи целеполагания “вмененным целеполаганием”.
Рис. 3.
Задача целеполагания при завершении окончании/группой оперативно назначенной миссии-3. Случай: миссия-3 назначена вышестоящим руководителем
Перечислим те БИС-ТУ, которые оказывают интеллектуальную поддержку руководителям групп активных объектов в решении ими описанных выше задач.
Руководитель любой автономно действующей группы, выполняющей заданную ей миссию (миссия-1 или миссия-2 для группы РГ-I, миссия-3 для группы РГ-II), всегда получает интеллектуальную поддержку от БИС-ТУ, которые настраиваются на ранг руководителя группы и наблюдаемую текущую внешнюю обстановку [1, 2]. Так при появлении коллизии “Этап миссии – Угроза” руководитель группы (рис. 1) оповещается о ней бортовой интеллектуальной информационной системой “Ситуационная осведомленность экипажа” (ИИС-СОЭ). Возникшую коллизию разрешает бортовая оперативно советующая экспертная система “Оперативное целеполагание” (БОСЭС-целеполагание), которая рекомендует руководителю группы один из трех упомянутых выше вариантов противодействия возникшей угрозе: а) противодействовать угрозе всей группой, оперативно сконструировав для группы новую миссию-2 (цель миссии-2, этапы достижения этой цели); б) противодействовать угрозе частью группы, определив для этого ее состав, руководителя этой части группы и оперативно сконструировав для этой группы новую миссию-3 (цель миссии-3, этапы достижения этой цели), в) противодействовать угрозе, не прерывая выполнение группой текущего этапа заданной миссии. Для этого в базе знаний бортовой оперативно советующей экспертной системы этого этапа полета (БОСЭС-“Этап миссии”) предусматривается проблемная субситуация “Противодействие угрозе этого типа”. После выполнения оперативно заданной миссии (миссия-2 для группы РГ-I, миссия-3 для группы РГ-II) руководители этих групп должны вернуть дееспособные части этих групп к выполнению исходной миссии-1. Рекомендацию на возврат группы вырабатывает БОСЭС-целеполагание, а сам возврат группы имеет следующие особенности.
Для группы, которая получила оперативную миссию-2 от своего руководителя (рис. 2, группа РГ-I), рекомендуемый способ возврата вырабатывает БОСЭС(РГ-I)-целеполагание.
Для выделенной группы (группа РГ-II), которая получила оперативную миссию-3 от своего вышестоящего руководителя (от РГ-I, рис. 3), рекомендуемый способ возврата вырабатывают совместно РГ-II и РГ-I:
РГ-II вырабатывает несколько возможных способов возврата своей группы в группу РГ-I. Рекомендации по возможным миссиям РГ-II получаются от БОСЭС(РГ-II)-целеполагание, а детализацию каждой миссии через последовательность этапов этой миссии рекомендует ему соответствующие БОСЭС(РГ-II)-“Этап миссии”;
РГ-I выбирает из полученных от РГ-II способов возврата его группы один способ, который должен реализовать РГ-II (вмененное для РГ-II целеполагание). Выбор РГ-I производит с учетом коллизий, которые вновь появились на выполняемом группой РГ-I этапе миссии-1. Рекомендации РГ-I вырабатывают БОСЭС(РГ-I)-“Выполняемый этап миссии-1” и БОСЭС(РГ-I)-“Этапов миссий, назначаемых для противодействия вновь появившимся угрозам”.
Заметим, что для случая выполнения заданной миссии (миссии-1) одним активным объектом решение задачи оперативного целеполагание описано в [3, 4].
2. Предметно независимый облик баз знаний БИС-ТУ, решающих задачи оперативного целеполагания. Интеллектуальную поддержку руководителю группы в решении задачи оперативного целеполагания оказывают упомянутые выше три типа БИС-ТУ, каждая из которых настраивается на ранг руководителя [1]:
интеллектуальная информационная система “Ситуационная осведомленность экипажа” (ИИС-СОЭ), опознающая возникшую коллизию “Этап миссии – Угроза” и рекомендующая ее руководителю группы для противодействия;
БОСЭС–целеполагание, рекомендующая руководителю текущую цель функционирования группы и последовательность этапов ее достижения – облик способа противодействия возникшей коллизии, поступившей из ИИС-СОЭ;
БОСЭС-этапа полета, которая конкретизирует полученный от БОСЭС-целеполагание облик способа противодействия возникшей коллизии, рекомендуя его руководителю группы для реализации.
Рекомендацию каждой БИС-ТУ руководитель группы может: 1) сразу отправить на реализацию бортовыми исполнительными системами активного объекта или 2) отправить, предварительно откорректировав ее, или 3) отказаться от рекомендации вовсе и решать задачу самостоятельно. Два последних случая для соответствующей интеллектуальной системы определяются как семантический отказ в ее базе знаний [2].
В базах знаний БИС-ТУ все процедуры решения задачи ориентированы на специфику предметной области и постоянно используют априорную информацию о выполняемой миссии и текущую информацию о сложившейся вокруг группы внешней обстановке. В разд. 3 статьи на примере конкретной предметной области показана эта ориентация, здесь же представим предметно независимый облик (термин введен В.И. Городецким) баз знаний названных типов БИС-ТУ.
2.1. Интеллектуальная информационная система “Ситуационная осведомленность экипажа”. Система выявляет на каждом текущем этапе выполнения миссии среди обнаруженных группой потенциальных угроз выполнению миссии непосредственную угрозу, представляемую в форме коллизии “Выполняемый этап миссии – Непосредственная угроза выполнению миссии” [5].
База знаний ИИС-СОЭ содержит два типа математических моделей (мат/модели).
Первый тип. Мат/модели развития каждой возможной потенциальной угрозы, характерной для заданной группе миссии и для каждого этапа выполнения этой миссии. Эти мат/модели определяют возможность отнести каждую наблюдаемую потенциальную угрозы к типу непосредственной угрозы – сформировать коллизии “Выполняемый этап миссии – Непосредственная угроза выполнению миссии”.
Второй тип. Мат/модели каждой пары “Непосредственная угроза из коллизии – Способ ей противодействовать”. В этих мат/моделях для каждой такой пары определяется момент времени, начиная с которого предотвратить угрозу этим способом уже невозможно. Эти моменты времени определяются как точки невозврата [6]. Непосредственная угроза с ближайшей точкой невозврата сообщается экипажу и передается в базу знаний БОСЭС-целеполагание.
2.2. БОСЭС-целеполагание. Определение облика способа противодействия опознанной в ИИС-СОЭ непосредственной угрозе – задача БОСЭС-целеполагание. Один из способов решения в базе знаний БОСЭС-целеполагание задач – решение по прецеденту [1].
В общем случае база знаний БОСЭС-целеполагание ориентирована на использование в ней следующей информации:
по иерархии группы активных объектов,
по выполняемой миссии и выполняемому этапу миссии,
по возникшей коллизии “Этап миссии – Угроза”,
по функциональным возможностям активных объектов как входящих в группу активных объектов, так и не входящих в нее, но взаимодействующих с ней или ей противодействующих;
по информации из мат/моделей активных объектов как цифровых копий реальных объектов, оперативно настраиваемых на наблюдаемые объекты. При этом полнота представления возможностей каждого не входящего в группу активного объекта зависит от функциональных возможностей систем наблюдения, размещенных на объекте, который наблюдает этот не входящий в группу активный объект;
по информации из мат/моделей взаимодействия активных объектов.
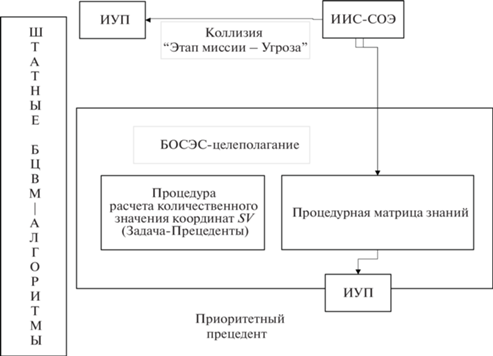
В базу знаний БОСЭС-целеполагания (рис. 4) включены: процедурная матрицы знаний, разработанная на основе экспериментальной матрицы знаний, и процедура расчета количественных значений координат ситуационного вектора SV (Задача – Прецеденты), соответствующих текущей внешней обстановке. По ним определяется количественное значение приоритета прецедентов, включенных в процедурную матрицу знаний. Способ решения задачи: прецедент с наибольшим приоритетом рекомендуется для использования.
Рис. 4.
БОСЭС-целеполагание: облик базы знаний и размещение БОСЭС в бортовой информационной среде активного объекта
Упомянутые матрицы знаний и способ решения задач по прецедентам подробно описаны в [7].
2.3. БОСЭС – “Этап миссии”. Облик базы знаний таких систем описан в [8]. Этап миссии представляется набором проблемных субситуаций (ПрС/С), в которых заранее подготовленному этапу миссии может мешать угроза возникшей коллизии “Этап миссии – Угроза”.
База знаний этих БОСЭС – “Этап миссии” имеет два иерархических уровня (рис. 5). На первом иерархическом уровне продукционными правилами активизируется ПрС/С, адекватная текущей внешней обстановке.
Рис. 5.
Облик базы знаний БОСЭС-“Этап миссии” и ее связи с бортовой информационной средой активного объекта
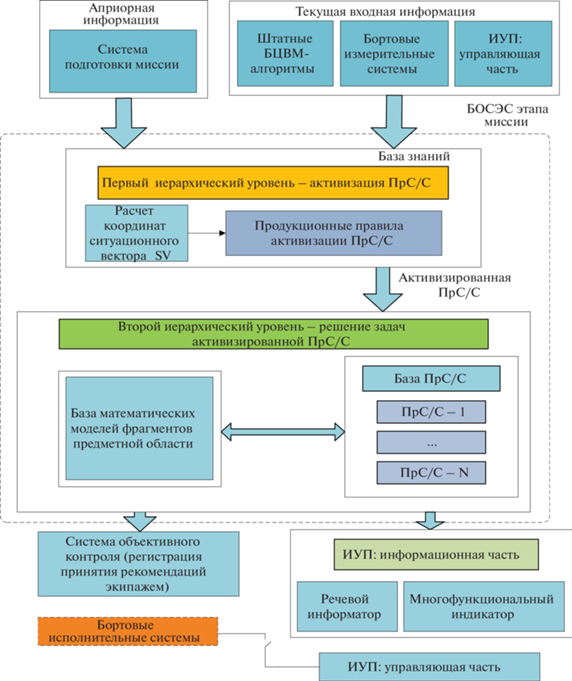
На втором иерархическом уровне базы знаний конструируется способ решения активизированной ПрС/С. Способы решения задач в ПрС/С: по прецеденту [1], по многокритериальному выбору альтернативы [9], оптимизационный [1].
Входная информация в БОСЭС-“Этап миссии”:
априорная: из системы подготовки миссии,
текущая из: 1) штатных БЦВМ-алгоритмов, 2) бортовых измерительных систем, 3) ИУП кабины экипажа.
Выходная информация из БОСЭС-“Этап миссии”:
на ИУП кабины: рекомендации экипажу,
в бортовую систему объективного контроля: полное или частичное принятие экипажем рекомендации БОСЭС-“Этап миссии” или игнорирование рекомендации. При этом два последних случая помечаются как семантические отказы базы знаний БОСЭС и регистрируются в системе объективного контроля, размещаемой на борту активного объекта [2].
3. Практически значимый пример. Интеллектуальная поддержка командиров иерархически упорядоченной группы истребителей при решении ими задачи “Возврат выделенной группы истребителей сопровождения в строй сопровождения УС”. Иерархически упорядоченная группа истребителей выполняет генеральную задачу вылета “Сопровождение ударных самолетов”. Группу истребителей (истребителей сопровождения (ИС)) возглавляет командир первого ранга К(ИС)-I, которому подчинены несколько подгрупп ИС. Каждую из этих подгрупп возглавляет командир второго ранга К(ИС)-II.
При выполнении группой истребителей генеральной задачи вылета командир группы К(ИС)-I на этапе полета “Маршрут-1” может столкнуться со следующими коллизиями (Клз) [10]:
Клз-1: появилось атакоопасное направление, с которого истребители противника могут атаковать сопровождаемые ударные самолеты (УС);
Клз-2: появились (с этого или другого направления) изготовившиеся к атаке истребители противника (ИП).
Остановимся на коллизии Клз-2. При ее появлении интеллектуальную поддержку командиру К(ИС)-I оказывают две БИС-ТУ: БОСЭС(К(ИС)-I) – “Маршрут-1” [10] и БОСЭС(К(ИС)–I)-целеполагание [1].
Пусть БОСЭС(К(ИС)-I)-целеполагание рекомендовала командиру К(ИС)-I разрешить эту коллизию, не меняя этапа полета группы Маршрут-1. В ПрС/С “Отражение атаки ИП” базы знаний БОСЭС(К(ИС)-I)–“Маршрут-1” выделена подгруппа истребителей сопровождения, назначен ее командир К(ИС)-II и поставлена ему задача “Отразить атаку истребителей противника”. Для группы К(ИС)-II это новая (текущая/оперативная) задача вылета.
Выделенная группа отразила атаку ИП. Командир выделенной группы К(ИС)–II собрал боеспособную часть группы (число боеспособных истребителей N), определил функциональные возможности боеспособной части выделенной группы (возможные точки ее выхода на траекторию полета УС), подготовил информацию (N, точки выхода) и передал ее командиру К(ИС)-I. Интеллектуальную поддержку командиру К(ИС)–II в решении этих задач оказывает БОСЭС(К(ИС)–II)-целеполагание и БОСЭС(К(ИС)–II)-“Возврат выделенной группы в строй сопровождения УС” (далее БОСЭС(К(ИС)–II)-“Возврат группы”).
Вернемся к командиру К(ИС)-I. Получив от командира выделенной группы К(ИС)-II сигнал о возможности ее возврата к выполнению задачи “Сопровождения ударных самолетов” вместе с информацией о нескольких способах возврата выделенной группы в строй сопровождения УС, командир К(ИС)-I соотносит их с появившимися ближайшими коллизиями Клз-1, Клз-2, (Клз-1 + Клз-2) или с фактом отсутствия коллизий. В результате этого анализа командир К(ИС)-I должен выбрать один из полученных способов возврата выделенной группы и передать его для реализации командиру выделенной группы К(ИС)-II.
Интеллектуальную поддержку командиру К(ИС)-I при решении этих задач оказывает БОСЭС(К(ИС)-I)-целеполагание и БОСЭС(К(ИС)-I)-“Маршрут-1”, базу знаний которой для решения упомянутых выше задач покажем ниже.
3.1. Борт К(ИС)-I: интеллектуальная поддержка командира К(ИС)-I в решении задачи возврата выделенной группы в строй сопровождения УС. Интеллектуальную поддержку К(ИС)-I оказывают взаимодействующие между собой БОСЭС(К(ИС)-I)-целеполагание и БОСЭС(К(ИС)-I)-“Маршрут-1”.
3.1.1. Облик базы знаний БОСЭС(К(ИС)-I)-целеполагание: фрагмент базы знаний, работающей при появлении информации о готовности выделенной группы вернуться в строй сопровождения. В таблице представлен облик базы знаний БОСЭС(К(ИС)-I)-целеполагание.
База знаний этой БОСЭС имеет два иерархических уровня.
На первом иерархическом уровне базы знаний БОСЭС продукционными правилами определяется активная коллизия из следующих возможных коллизий (Клз) на этапе полета группы “Маршрут-1”:
Клз-А: “Маршрут-1 – “Возврат выделенной группы””,
Клз-Б: “Маршрут-1 – “Возврат выделенной группы” + “Истребители противника””,
Клз-В: “Маршрут-1 – ““Возврат выделенной группы” + “Атакоопасное направление””,
Клз-Г: “Маршрут-1 – “Возврат выделенной группы” + “Истребители противника” + “Атакоопасное направление””.
На втором иерархическом уровне базы знаний БОСЭС описанными ниже процедурами А-1, А-2, Б-1, Б-2, Б-3 определяются условия подключения соответствующих БОСЭС-“Этап полета”, которые вместе с указанными процедурами выбирают (среди полученных от К(ИС)–II точек встречи и точек выхода) точку, в которую должна выйти подгруппы командира К(ИС)–II.
Рассмотрим перечисленные коллизии (табл. 1).
Таблица 1.
Облик базы знаний БОСЭС(К(ИС)-I)-целеполагание: режим “Вмененное целеполагание командиру выделенной группы”
| БОСЭС(К(ИС)-I)-целеполагание | |||
|---|---|---|---|
| Первый иерархический уровень базы знаний | Второй иерархический уровень базы знаний | ||
| Состав возможных у К(ИС)-I коллизий (Клз) |
Процедуры в базе знаний БОСЭС(К(ИС)-I)–целеполагание | Подключаемые БОСЭС(К(ИС)-I)–этапа полета | Рекомендуемая командиру К(ИС) – II точка прибытия |
| Клз-А: “Маршрут-1 – “Возврат выделенной группы”” | Процедура А-1 “Назначение точки прибытия из числа точек встречи” | Нет | Ближайшая точка встречи |
| Клз-Б: “Маршрут-1 – “Возврат выделенной группы” + “Отражение атаки истребителей противника (ИП))”” | Процедура Б-1:
а) Nпотр(ИС) < Nналч(ИС),
б) Nпотр(ИС) ≥ Nналч(ИС). Процедура Б-2. “Точка блокировки атаки ИП на УС” |
БОСЭС(К(ИС)-I)–“Маршрут-1” БОСЭС(К(ИС)-I)– “Ввод группы в воздушный бой” |
Ближайшая точка встречи. Точка блокировки атаки ИП на УС |
| Клз-В: “Маршрут-1 – “Возврат выделенной группы” + “Прикрытие атакоопасного направления)”” | Процедура А-1 | БОСЭС(К(ИС)-I)–“Маршрут-1” | Ближайшая точка встречи |
| Клз-Г: “Маршрут-1 – “Возврат выделенной группы” + “Отражение атаки истребителей противника (ИП)”+ “Прикрытие атакоопасного направления)”” | Процедура Б-1 “Необходимое число ИС для отражения атаки ИП”:
а) Nпотр(ИС) < Nналч(ИС) Процедура А-1,
б) Nпотр(ИС) > Nналч(ИС) Процедура Б-2.
“Точка блокировки атаки ИП на УС”.
Процедура А-2 “Назначения точки прибытия из числа точек выхода”, в) Nпотр(ИС) = = Nналч(ИС). Процедура Б-3. “Точка блокировки атакоопасного направления”. Процедура А-2 |
БОСЭС(К(ИС)-I)-“Маршрут-1”. БОСЭС(К(ИС)-I)- “Ввод группы в воздушный бой”. БОСЭС(К(ИС)-I)- “Ввод группы в воздушный бой” |
Ближайшая точка встречи. Точка блокировки атаки ИП на УС. “Точка блокировки атакоопасного направления” |
На втором иерархическом уровне базы знаний при активизации Клз-А БОСЭС(К(ИС)-I)-целеполагание рекомендует командиру К(ИС)-I вернуть выделенную группу в ближайшую точку встречи выделенной группы с УС. Эта точка выбирается процедурой А-1 из числа возможных точек встречи, переданных командиром К(ИС)-II.
На втором иерархическом уровне базы знаний при активизации Клз-Б запускается процедура Б-1 “Определение числа ИС, необходимого для отражения атаки ИП. В процедуре Б-1 определяется Nпотр(ИС) – потребное число ИС, боевой потенциал которых не ниже боевого потенциала группы атакующих ИП [10].
Если потребное число ИС Nпотр(ИС) меньше числа наличного числа Nналч(ИС), в текущий момент находящихся в группе сопровождения УС, то БОСЭС(К(ИС)-I)-целеполагание:
рекомендует командиру К(ИС)-I вернуть выделенную группу в ближайшую точку встречи выделенной группы с УС, которая выбирается из числа возможных точек встречи, переданных командиром К(ИС)-II;
подключает БОСЭС(К(ИС)-I)-“Маршрут-1” с выбором в ее базе знаний ПрС/С “Отражение атаки ИП частью группы ИС”, которая рекомендует командиру К(ИС)-I способ решения этой ПрС/С [10].
Если Nпотр(ИС) больше и равно числу Nналч(ИС), в текущий момент находящихся в группе сопровождения УС, то БОСЭС(К(ИС)-I)-целеполагание:
подключает в БОСЭС(К(ИС)-I)-“Ввод всей группы в бой с ИП”, которая рекомендует командиру К(ИС)-I тактический прием ввода группы в бой и вариант тактического целераспределения [1];
подключает процедуру Б-2 “Определение точки блокировки атаки ИП на УС”, в которую следует вернуть выделенную группу для поддержки ИС, вступающих в бой с ИП. Этой точкой является точка пересечения траектории атаки ИП-УС с траекторией полета УС.
На втором иерархическом уровне базы знаний при активизации Клз-В БОСЭС(К(ИС)-I)-целеполагание:
подключает БОСЭС(К(ИС)-I)-“Маршрут-1” с выбором в ее базе знаний ПрС/С “Прикрытие атакоопасного направления”, получая из БОСЭС(К(ИС)-I)-“Маршрут-1” точку прикрытия. Этой точке процедурой А-1 ставится в соответствие одна из возможных точек возврата, полученных от К(ИС)-II. Эта точка передается К(ИС)-II для реализации выхода в нее (вмененное целеполагание для К(ИС)-II).
На втором иерархическом уровне базы знаний при активизации Клз-Г “Возврат выделенной группы” + “Истребители противника” + “Атакоопасное направление” БОСЭС(К(ИС)-I)-целеполагание подключает процедуру Б-1 расчета Nпотр(ИС) потребного числа ИС, боевой потенциал которых не ниже боевого потенциала группы атакующих ИП.
Если Nпотр(ИС) меньше числа Nналч(ИС), в текущий момент находящихся в группе сопровождения УС, то БОСЭС(К(ИС)-I)-целеполагание:
рекомендует командиру К(ИС)-I вернуть выделенную группу в ближайшую точку встречи выделенной группы с УС, которая выбирается процедурой А-1 из числа возможных точек встречи, переданных командиром К(ИС)-II;
подключает БОСЭС(К(ИС)-I)-“Маршрут-1” с выбором в ее базе знаний ПрС/С “Отражение атаки ИП частью группы ИС”, которая рекомендует командиру К(ИС)-I способ решения этой ПрС/С.
Если Nпотр(ИС) больше числа Nналч(ИС), в текущий момент находящихся в группе сопровождения УС, то БОСЭС(К(ИС)-I)-целеполагание:
подключает БОСЭС(К(ИС)-I)-“Ввод всей группы в бой с ИП”, которая рекомендует командиру К(ИС)-I тактический прием ввода группы в бой и вариант тактического целераспределения;
подключает процедуру Б-2 “Определение точки блокировки атаки ИП на УС”, в которую следует вернуть выделенную группу для поддержки ИС, вступающих в бой с ИП. Этой точкой является точка пересечения траектории атаки ИП-УС с траекторией полета УС.
Если Nпотр(ИС) равно числу Nналч(ИС), в текущий момент находящихся в группе сопровождения УС, то БОСЭС(К(ИС)-I)-целеполагание:
подключает БОСЭС(К(ИС)-I)-“Ввод всей группы в бой с ИП”, которая рекомендует командиру К(ИС)-I тактический прием ввода группы в бой и вариант тактического целераспределения;
подключает БОСЭС(К(ИС)-I)-“Маршрут-1”, которая определяет точку блокировки атакоопасного направления.
3.1.2. Процедуры второго иерархического уровня базы знаний БОСЭС(К(ИС)-I)-целеполагание. На втором иерархическом уровне базы знаний БОСЭС(К(ИС)-I)-целеполагание используются следующие процедуры.
Процедура А-1 “Назначения точки прибытия из числа точек встречи”. Это процедура выбора ближайшей к УС точки встречи из числа точек встречи, полученных от командира К(ИС)-II.
Процедура А-2 “Назначения точки прибытия из числа точек выхода”. В этой процедуре: 1) точке блокировки атаки ИП на УС ставится в соответствие точка выхода, выбранная из числа точек выхода, присланных командиром К(ИС)-II, 2) точке блокировки атакоопасного направления ставится в соответствие точка выхода, выбранная также из числа точек выхода, присланных командиром К(ИС)-II.
Процедура Б-1 “Необходимое число ИС для отражения атаки ИП”. Входная информация в процедуру: число и тип ИП и ИС.
В базе знаний БОСЭС(К(ИС)-I)-целеполагание находятся таблицы боевых потенциалов различных типов ИП и боевых потенциалов различных типов ИС [10], по которым по числу и типу ИП, типу ИС определяется Nпотр(ИС) – потребное число ИС имеющегося типа, которое необходимо для отражения атаки ИП, число и тип которых определился.
Если число Nпотр(ИС) меньше числа наличных ИС, находящихся вблизи УС, то подключается БОСЭС(К(ИС)-I)-“Маршрут-1”, в проблемной субситуации которой “Отражение атаки ИП частью группы ИС” решается возникшая проблема противодействия истребителям противника [10]. Предписываемая командиру К(ИС)-II точка прибытия (ближайшая точка встречи выделенной группы с УС) определяется процедурой А-1.
Если число Nпотр(ИС) больше или равно числу ИС, находящихся вблизи УС, то подключается БОСЭС(К(ИС)-I)-“Ввод группы ИС в воздушный бой с ИП”.
Предписываемая командиру К(ИС)-II точка прибытия определяется из процедуры Б-2:“Точка блокировки атаки ИП на УС”. Точка блокировки атаки ИП в эту процедуру поступает из БОСЭС(К(ИС)-I)-“Маршрут-1”. Там по вектору скорости атакующих ИП определяется точка пересечения траектории атаки ИП с траекторией полета УС [10], которая в процедуре Б-2 определяется как “Точка блокировки атаки ИП на УС”. Она пересылается в процедуру А-2.
Процедура Б-3. “Точка блокировки атакоопасного направления”. Точка блокировки атакоопасного направления в эту процедуру поступает из БОСЭС(К(ИС)-I)-“Маршрут-1” [10]. Она пересылается в процедуру А-2.
3.2. Борт К(ИС)-II: интеллектуальная поддержка командира при решении задачи возврата выделенной группы в строй сопровождения УС. Интеллектуальную поддержку командиру К(ИС)-II оказывает БОСЭС(К(ИС)-II)-“Возврат группы”. Как и БОСЭС-“Этапа полета”, эта БОСЭС(К(ИС)-II)-“Возврат группы” имеет структуру базы знаний, описанную в [8]. В ее базу знаний включены ПрС/С: “Выделение боеспособной части выделенной группы”, “Определение точки сбора боеспособной части выделенной группы”, “Конструирование траекторий встреч боеспособной части выделенной группы с сопровождаемыми УС”, “Конструирование траекторий выхода боеспособной части, выделенной на заданный отрезок траектории полета сопровождаемых УС”.
Остановимся на описании фрагментов базы знаний БОСЭС(К(ИС)-II)-“Возврат группы” для двух последних ПрС/С. Итак, выделенная группа ИС выполнила задачу “Отразить атаку ИП” (таблица). Ее командир К(ИС)-II сформировал боеспособную часть выделенной группы и собрал ее самолеты в точке сбора. В этот момент сопровождаемые УС находятся в точке их маршрута, которая известна на борту самолета К(ИС)-II.
Для возврата боеспособной части выделенной группы (далее выделенная группа ИС) в строй сопровождения УС на борту самолета К(ИС)-II конструируются траектории встречи ИС с УС и траектории упреждающего выхода ИС на траекторию УС.
3.2.1. Задача конструирования траекторий встречи [11, 12]. Для возврата боеспособной части выделенной группы (далее выделенная группа ИС) на борту самолета К(ИС)-II конструируются траектории встречи ИС с УС и траектории упреждающего выхода ИС на траекторию УС.
Траектория встречи ИС с УС определяется в классе траекторий с характеристиками:
профиль полета: “набор с начальной высоты полета ИС заданной высоты (высота полки”) – полет на полке” – снижение на заданную конечную высоту”;
начальная и конечная высота ИС равна высоте УС;
проекция траектории ИС на горизонтальную плоскость является прямой линией.
Для задачи конструирования траектории возврата выделенной группы сформируем ее графическое представление, показанное на рис. 6.
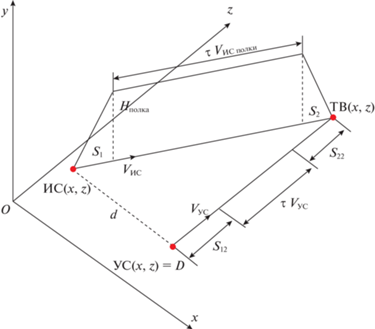
Отложим в начале траектории УС отрезок S12 и в конце траектории УС в окрестности искомой точки встречи – отрезок S22. Определение этих отрезков дадим ниже.
Введем прямоугольную систему координат на горизонтальной плоскости полета УС. Ось ОZ направлена параллельно траектории УС. Ось ОХ направлена от ИС, находящегося слева от УС, в сторону УС. Начало координат выбрано слева от ИС и ниже его. Отметим начальное расположение выделенной группы ИС(x, z) и УС(x, z) и спроектируем на горизонтальную плоскость искомую траекторию встречи ИС с УС (отрезок ИС (x, z ) – точка встречи ИС с УС ТВ (x, z)), на котором отметим:
1) в начале этой проекции траектории проекцию участка траектории набора ИС высоты полки, обозначив его S1, и зафиксируем для него время набора высоты ∆t1;
2) в конце этой проекции траектории проекцию участка траектории снижения ИС с высоты полки на высоту УС, обозначив его S2, и зафиксируем для этого участка полета время снижения ∆t2.
Соответствующие этим временам длины траекторий УС находятся как:
Определение длины проекции на горизонтальную плоскость участка траектории полета ИС на полке $\tau $Vполки (искомое время полета ИС на полке обозначим через $\tau $ и длины соответствующего ему участка $\tau $VУС траектории УС) получим, используя (рис. 6) прямоугольный треугольник ИС(x, z) – ТВ(x, z) – УС(x, z).
Построение полученного прямоугольного треугольника (“треугольника τ”) для определения длин упомянутых отрезков $\tau $Vполки и $~\tau $VУС зависит от взаимного начального расположения ИС(x, z) и УС(x, z).
Из этого треугольника, используя теорему Пифагора, получаем квадратное уравнение aτ2 + bτ + + c = 0,
из которого определяем время полета ИС на полке$~{{\tau }_{0}}$.
В [12] показано, что для всех возможных “треугольников $\tau $” справедливы единые формулы расчета коэффициентов соответствующего квадратного уравнения:
коэффициент при τ2: $[V_{{{\text{ИС}}}}^{2} - V_{{{\text{УС}}}}^{2}]$,
коэффициент при τ1: $\left[ {2\left( {{{S}_{1}} + {{S}_{2}}} \right){{V}_{{{\text{ИС}}}}}--2\left[ {{{S}_{{11}}} + {{S}_{{12}}} + {{Z}_{{{\text{УС}}}}} - {{Z}_{{{\text{ИС}}}}}} \right]{{V}_{{{\text{УС}}}}}} \right]$,
коэффициент при τ0: $[{{\left( {{{S}_{1}} + {{S}_{2}}} \right)}^{2}} - {{\left[ {{{S}_{{11}}} + {{S}_{{12}}} + {{Z}_{{{\text{УС}}}}} - {{Z}_{{{\text{ИС}}}}}} \right]}^{2}} - {{\left[ {{{X}_{{{\text{УС}}}}} - {{X}_{{{\text{ИС}}}}}} \right]}^{2}}]$.
Напомним, что в представленных зависимостях VИС – скорость полета ИС на заданной полке, а наименьший положительный корень квадратного уравнения τ0 определяет время полета ИС на полке. Тогда время полета ИС до встречи с УС равно
Координаты точки встречи (т.в) ИС с УС равны:
Длина проекции траектории ИС на горизонтальную плоскость
Заметим, что в описанных процедурах, не используется математическая модель ИС на этапах “набор высоты” и “спуск”. Необходимые для расчетов проекции длины участков ${{S}_{1}}$, ${{S}_{2}}$ и времена Δt1 и Δt2 прохождения ИС этих участков, могут быть получены на основании обработки результатов летных испытаний [11].
3.2.2. Задача конструирования траекторий ИС, обеспечивающих упреждающий выход ИС на точки маршрута полета УС. Исходными данными для решения задачи конструирования с упреждающим выходом на траекторию сопровождаемых УС являются:
длина участка точек упреждения, размещаемого дальше всех рассчитанных выше точек встречи,
положение начальной точки выхода на траектории полета УС,
заданная высота полки траектории выделенной группы ИС,
скорость полета выделенной группы на полке,
длина горизонтальных проекций участков подъема ИС на высоту полки S1 и спуска с высоты полки S2 для заданной высоты полки,
время, необходимое выделенной группе для подъема ∆t1, и время спуска с высоты ∆t2.
Высота полета до точек выхода определяется согласно следующему алгоритму:
находится длина L отрезка прямой, соединяющей проекцию на горизонтальную плоскость точки сбора выделенной группы и проекцию на горизонтальную плоскость выбранной точки упреждающего выхода,
проверяется возможность полета выделенной группы до заданной точки выхода на траекторию УС по траектории с полкой на заданной высоте.
Если (S1 + S2) < L, то реализация траектории выхода ИС на полку возможна. В противном случае (при невыполнении условия) данное неравенство формируется для оговоренных высот полок и соответствующих наборов S1 и S2 для них. Если не для одного из этих наборов условие не выполняется, то полет до заданной точки выхода производится без выхода на полку на начальной высоте полета выделенной группы.
Скорость полета выделенной группы на определенной высоте, как и длина горизонтальных проекций участков подъема и спуска с этой высоты и время полета выделенной группы, соответствующее этим участкам, поступает из ранее сформированной базы данных.
Определение траекторий выхода будем проводить также в ранее сформированной системе координат на горизонтальной плоскости полета УС.
Покажем вид зависимости времени выхода ИС в точки упреждающего выхода [50; 450 км] для S1 + S2 = 2.5 км, ∆t1 + ∆t2 = 55 с и скорости полета ИС на полке 0.58 км/с (рис. 7).
Рис. 7.
Аппроксимация полиномом второй степени времен выхода ИС в точки заданного отрезка траектории УС
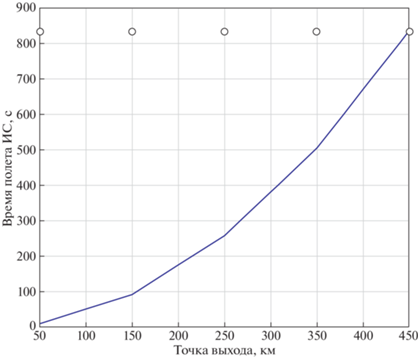
Полученная зависимости неплохо аппроксимируются полиномом второй степени.
Таким образом К(ИС)-II передает на борт К(ИС)-I, представленные ему БОСЭС(К(ИС)-II)-“Возврат группы”данные через координаты отрезка траектории УС и коэффициенты полинома, аппроксимирующего время прибытия ИС в точки упомянутого отрезка.
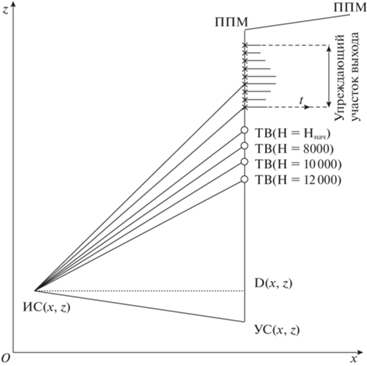
Возможный вид предъявления этой информации на многофункциональном индикаторе кабины К(ИС)-I показан на рис. 8. Здесь ППМ – поворотный пункт маршрута УС; точка встречи ИС с УС на высоте Н = ХХ), где символом ХХ обозначены в точках встречи при полете ИС по траектории без выхода на полку (полет на начальной высоте Ннач) ХХ = Ннач, в точках встречи с выходом на полку ХХ = 8000 м, с выходом на полку ХХ = 10000 м, с выходом на полку ХХ = 12 000 м; упреждающий участок выхода – выделенный участок траектории УС и времена выхода ИС в точки этого участка, определяемые аппроксимирующим полиномом, коэффициенты которого были переданы К(ИС)-II на борт К(ИС)- I.
Рис. 8.
Представление на информационном кадре многофункционального индикатора кабины К(ИС)- I точек встречи ИС с УС и времен прибытия ИС в точки выделенного отрезка траектории УС
4. О решении задач целеполагание в повседневной жизни. Задачи целеполагания часто возникают в повседневной жизни. Существуют различные методы решения этих задач, ориентированные на непосредственное привлечение к их решению заинтересованных профессионалов [13–17]. Наиболее проработанным на наш взгляд является метод типа SMART-целеполагание [13]. Он применяется в ситуациях, когда цель слабо формализована, а условия появления задачи постоянные или “быстро меняются”.
Этапы технологии метода:
1) конкретизация цели и возможных способов ее достижения (specific – конкретизация, формализация),
2) выбор критериев оценки цели (measurable – измерение),
3) прогнозирование и оценка степени достижения цели (achievable – достижимая),
4) обоснование цели как необходимой, так и не противоречащей ценностям сферы жизнедеятельности (relavant – релевантная, актуальная),
5) определение допустимого времени решения задачи (time-bound: ограниченная по времени).
Каждый этап представляется текстовой инструкцией, в которой указано, что нужно получить на этом этапе (цель этапа). Предполагается, что способ достижения цели этапа определят привлеченные к решению задачи профессионалы.
В отличие от этого разработанный в статье метод не требует непосредственного участия профессионалов в процессе решения задачи оперативного целеполагания. Кроме этого, при ее решении всегда учитывается необходимость безусловного выполнения заданной миссии.
5. О решении задач достижения цели, определившейся после решения задачи оперативного целеполагания. При решении любой задачи оперативного целеполагания требует всегда учитывать особенности каждого компонента возникшей триады “Выполняемый этап миссии – Возникшая непосредственная угроза выполнению миссии – Доступные средства противодействия угрозе”.
Публикации [18–22], рассматриваемые с позиции создания способов достижения цели, поставленной группе активных объектов в решенной задаче оперативного целеполагания, интересны разрабатываемыми в них различными конструктивными подходами, которые могут быть использованы в интеллектуальных системах, конструирующих способы достижения группой оперативно назначенных целей.
Подробное изложение приложений этих фундаментальных результатов в области управления подвижными объектами и их группами в конфликтных средах, в том числе результатов опытной эксплуатации разработанных программно-аппаратных средств на объектах управления в реальной среде, является предметом специальных публикаций.
Заключение. Для предметной области, которая представима компонентами “группа объектов, заранее заданная группе миссия, целенаправленно или пассивно противодействующая среда выполнению миссии”, разработана методология решения возникающих задач оперативного целеполагания. Эти задачи появляются, когда в процессе выполнения группой этапа миссии возникают коллизия “Выполняемый этап миссии – Непосредственная угроза выполнению миссии”. Методология включает в себя: системный анализ предметной области, позволяющий выявить состав и взаимодействие необходимых БИС-ТУ; использование раннее разработанного предметно независимого облика баз знаний этих систем; “насыщение” этого облика указанных БИС-ТУ конкретиками выбранной предметной области, выполняемой миссии и возникшей коллизии.
Использование так “насыщенных” и так взаимодействующих БИС-ТУ дает возможность конструктивно решить возникшую задачу оперативного целеполагания.
Список литературы
Федунов Б.Е. Бортовые интеллектуальные системы тактического уровня для антропоцентрических объектов (примеры для пилотируемых летательных аппаратов). М.: Де Либри. 2018. 246 с.
Федунов Б.Е. Бортовые оперативно советующие экспертные системы тактического уровня для пилотируемых летательных аппаратов – объекты разработки и эксплуатации // М. Изв. РАН. ТиСУ. 2016. № 4. С. 113–132.
Желтов С.Ю., Федунов Б.Е. Оперативное целеполагание в антропоцентрических объектах с позиции концептуальной модели “Этап”. I. Структуры алгоритмов поддержки процесса решения задачи экипажем // М. Изв. РАН.ТиСУ. 2015. № 3. С. 57–71.
Желтов С.Ю., Федунов Б.Е. Оперативное целеполагание в антропоцентрических объектах с позиции концептуальной модели “Этап”. II. Режимы работы бортовой оперативно советующей экспертной системы и диалоги ее с экипажем // М. Изв. РАН. ТиСУ. 2016. № 3. С. 55–69.
Грибков В.Ф., Федунов Б.Е. Бортовая информационная интеллектуальная система “Ситуационная осведомленность экипажа боевых самолетов” // Интеллектуальные системы управления / Под ред. акад. РАН С.Н. Васильева. М. : Машиностроение, 2010. С. 108–116.
Федунов Б.Е. “Электронный летчик”: “Точка невозврата” пройдена не будет. Бортовые оперативно советующие экспертные системы тактического уровня для пилотируемых летательных аппаратов // Авиапанорама. 2016. № 1. С. 9–20 (свободный доступ в Интернете).
Федунов Б.Е. Решение задач по прецеденту в базах знаний бортовых интеллектуальных систем тактического уровня на этапах выполнения миссии подвижным объектом // М. Изв. РАН. ТиСУ. 2023. № 1.
Патент на изобретение № 275 13 77 “Способ интеллектуальной поддержки экипажа летательного аппарата при выполнении этапа полета”. Патентообладатель ФГУП ГосНИИАС. Приоритет изобретения 29 октября 2020 г.
Федунов Б.Е., Юневич Н.Д. Оперативный способ решения задач многокритериального выбора альтернативы в базах знаний бортовых оперативно советующих экспертных систем // М. Изв. РАН. ТиСУ. 2021. № 3. С. 111–128.
Патент на изобретение № 272 45 73 “Система интеллектуальной поддержки командира группы истребителей сопровождения для этапа полета “Маршрут-1””. Патентообладатель ФГУП ГосНИИАС. Приоритет изобретения 22 ноября 2019 г.
ГревцовН.М., Перчиц С.Н., Федунов Б.Е., Юневич Н.Д. Интеллектуальная поддержка командира группы истребителей сопровождения при решении им задачи возврата части группы, отразившей атаку истребителей противника // М. Изв. РАН. ТиСУ. 2018. № 4. С. 139–152.
Галиханов С.К., Федунов Б.Е., Шигина М.А. Конструирование траекторий встречи в базах знаний БОСЭС-этапа полета // М. Изв. РАН. ТиСУ. 2022. № 3. С. 104–115.
Архангельский Глеб. Корпоративный тайм-менеджмент. Энциклопедия решений. М.: ООО “Альпина Бизнес Букс”. 2008.
Yitzhak F., Slowik L.H. Enriching Goal-Setting Theory With Time: An Integrated Approach // Academy of Management Review. 2004. V. 29. № 3. P. 404–422.
Latham G.P. The Motivational Benefits of Goal-Setting // Academy of Management Executives. 2004. V. 18. № 4.P. 126–129.
Locke E.A., Latham G.P. Building a Practically Useful Theory of Goal Setting and Task Motivation: A 35-Year Odyssey // American Psychologist. 2002. V. 57. № 9. P. 705–717.
Terpstra D.E., Rozell El., J. The Relationship of Goal Setting to Organizational Profitability // Group & Organization Management. 1994. V. 19. P. 285–295.
Buzikov M.E., Galyaev A.A., Guryev Yu.V., Titov K.B., Yakushenko E.I., Vassilyev S.N. Intelligent control of autonomous and anthropocentric on-board systems. // XIIIth Intern. Symposium “Intelligent Systems” (INTELS’18), St. Petersburg, Russia. Procedia Computer Science. 2019. V. 150. P. 10–18.
Zabarankin M., Uryasev S., Murphey R. Aircraft Routing under the Risk of Detection // Naval Research Logistics, 2006. V. 53 (8). P. 728–747.
Якушенко Е.И., Гурьев Ю.В., Эйдук В.И., Васильев С.Н., Добровидов А.В., Кулида Э.Л., Маслов Е.П., Ткаченко И.В., Вишневский А.М., Шлемов Ю.Ф. Бортовой комплекс управления для секретности морского подводного объекта с оперативно-консультативной системой // Информационные бюллетени компьютерных информационных технологий. 2012. Т. 10. С. 9–16.
Galyaev A.A., Maslov E.P. On the Border Patrolling Problem // J. of Computer and Systems Sciences Intern. 2011. V. 50 (5). P. 837–846.
Lomuscio A., Michaliszyn J. Verifying Multi-Agent Systems by Model Checking Three-valued Abstractions Imperial College London // Proc. 14th Intern. Conf. on Autonomous Agents and Multiagent Systems (AAMAS’2015). Istanbul. 2015. P. 189–198.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления