

Геомагнетизм и аэрономия, 2023, T. 63, № 1, стр. 125-136
Определение положения южного магнитного полюса по данным российских кругосветных экспедиций: 1820 г. (Беллинсгаузен), 2020 г. (“Адмирал Владимирский”) Часть 2. Экспедиция ОИС “Адмирал Владимирский”
С. А. Меркурьев 1, 2, *, В. Г. Боярских 1, И. М. Демина 1, С. А. Иванов 1, В. А. Солдатов 1
1 Санкт-Петербургский филиал Института земного магнетизма,
ионосферы и распространения радиоволн РАН (СПбФ ИЗМИРАН)
Санкт-Петербург, Россия
2 Санкт-Петербургский государственный университет (СПбГУ)
Санкт-Петербург, Россия
* E-mail: sam_hg@hotmail.com
Поступила в редакцию 11.02.2022
После доработки 23.05.2022
Принята к публикации 25.05.2022
- EDN: KRQLYO
- DOI: 10.31857/S0016794022100091
Аннотация
В 2019‒2020 гг. Российским географическим обществом была организована кругосветная экспедиция на океанографическом исследовательском судне “Адмирал Владимирский”. Одной из целей этой экспедиции было определение по экспериментальным данным положения Южного магнитного полюса. В первой части этой работы поставленная задача решалась нами на основе данных о склонении, полученных в ходе экспедиций Беллинсгаузена и Кука. Во второй части положение Южного магнитного полюса определяется по данным компонентных и модульных измерений, полученным на океанографическом исследовательском судне “Адмирал Владимирский”.
1. ВВЕДЕНИЕ И ИСТОРИЧЕСКАЯ СПРАВКА
В двадцатом веке было предпринято несколько экспедиций с целью изучения Антарктиды и определения положения Южного магнитного полюса Земли (ЮМП) [Knapp, 1969]. Данные об этих экспедициях приведены в табл. 1. Поскольку до начала 60-х гг. ЮМП находился на континенте, определение его положения было связано с продвижением вглубь континента. Позднее, в процессе дрейфа ЮМП переместился на акваторию моря Дюрвиля. Американская экспедиция 1961‒1962 гг. на ледоколах максимально приблизилась к предполагаемому положению ЮМП в районе залива Содружества. Берроуз и Хэнли на вертолете добрались до ст. Кейп-Денисон и, перемещаясь на вертолете, выполнили ряд измерений склонения и наклонения. По полученным данным была построена карта наклонения и определено положение ЮМП [Burrows, 1963].
Таблица 1.
Положение ЮМП по данным экспедиций разных лет
| Год | Широта (°N) | Долгота (°E) | Экспедиция |
|---|---|---|---|
| 1903.2 | –72.9 | 156.4 | Scott British Antarctic Exp. |
| 1909 | –71.6 | 152.0 | Shackelton British Antarctic Exp. |
| 1912 | –71.17 | 150.8 | Bage et al. Australasian Antarctic Exp. |
| 1931 | –70.3 | 149.04 | Kennedy, Brit/Aus/NZ exp. |
| 1952 | –68.1 | 143.0 | Mayaud, French South Polar Exp. |
| 1962.1 | –67.5 | 140.0 | Burrows and Hanley Exp. |
| 1983 | 65.1 | 138.4 | “Фаддей Беллинсгаузен” |
| 1986 | –65.3 | 139.167 | Aust. Bureau of Min Resources MV Icebird |
| 2000 | –64.67 | 138.33 | Barton |
В 1982‒1983 гг. Российским географическим обществом (РГО) и Главным управлением навигации и океанографии МО РФ была организована кругосветная антарктическая экспедиция, одной из задач которой было определение положения ЮМП, находившегося к этому времени на свободной от льда акватории. Фактически, это была первая морская экспедиция, перед которой стояла такая задача. В экспедиции принимали участие два океанографических судна: “Адмирал Владимирский” и “Фаддей Беллинсгаузен”. Участниками экспедиции были проведены магнитометрические исследования в море Дюрвиля в районе планируемого положения ЮМП. В результате экспресс-обработки полученных данных было установлено, что ОИС “Фаддей Беллинсгаузен” 3 февраля 1983 г. прошел в непосредственной близости от полюса, где и был спущен морской буй. Данные, полученные в ходе этой экспедиции, и научно-технический отчет находятся в Центральном картографическом производстве (ЦКП ВМФ). По сделанным оценкам ЮМП находился в точке с координатами 65°10′ S и 138°40′ E. Подробно результаты экспедиции и описание примененного метода можно найти в работах [Золотайкин, 2007; Черноусов, 2020].
В 1986 году австралийскими учеными для определения положения ЮМП измерялась горизонтальная составляющая геомагнитного поля. Для этой цели был использован набортный трехосный феррозондовый магнитометр, установленный на подвесе. Датчик был окружен системой катушек Гельмгольца для частичного гашения магнитного поля корабля [Barton et al., 1987]. В результате положение ЮМП на эпоху 1986.0 было оценено как 65°10′ S, 139°10′ E. Сами авторы полагали точность разработанного ими метода недостаточной и после модификации как приборной базы (датчик был вынесен на кронштейнах за пределы корабля), так и методики проведения измерений и обработки их результатов повторили эксперимент в 2000 году [Barton, 2002]. Для координат положения ЮМП на эпоху 2000 г. были получены значения 64.67° S, 138.12° E.
2. ПРИБОРНАЯ БАЗА МАГНИТОМЕТРИЧЕСКОЙ ЛАБОРАТОРИИ
Поскольку магнитное поле Земли является векторной величиной, для его полного описания необходимо иметь данные о пространственно-временнóм распределении всех компонент вектора. Однако выполнение компонентных измерений на борту подвижного ферромагнитного носителя сопряжено с целым рядом технических и методических трудностей и, в первую очередь, с трудноразрешимой задачей разделения вкладов измеряемого геомагнитного поля и поля самого носителя. Поэтому в настоящее время большинство магнитометрических измерений на акватории Мирового океана выполняется забортными магнитометрами, а измеряемой величиной является модуль полного вектора магнитного поля. В ходе выполненной на “Адмирале Владимирском” съемки были использованы приборы двух типов: набортные компонентные магнитометры и забортный буксируемый протонный магнитометр.
2.1. Компонентные магнитометры
Компонентные измерения осуществлялись магнитовариационным комплексом MVC-2, разработанным в ИЗМИРАН и состоящим из трех датчиков торсионного типа [Kopytenko et al., 1994]. Эти датчики были ориентированы вдоль продольной X, поперечной Y и вертикальной Z (вниз) осей носителя, образующих “мобильную” систем координат. Параллельно с этим комплексом использовался компонентный магнитометр с датчиками, принцип действия которых основан на магниторезистивном эффекте. Устройство и принцип действия тонкопленочных пермаллоевых магниторезистивных сенсоров описаны в статье А. Маргелова [2005]. Датчик выполнен в сверхминиатюрном 14-выводном корпусе LCC размером 3.5 × 3.5 мм.
Оцифровка измеренных значений поля осуществлялась 24-разрядным АЦП, что соответствует пороговой чувствительности компонентных магнитометров на уровне 0.001 нТл. Частота оцифровки 1, 10 и 50 Гц позволяла регистрировать с высоким амплитудным и временны́м разрешением изменения магнитного поля во времени и пространстве: локальные магнитные аномалии связанные с особенностями строения земной коры, изменения намагниченности судна (жесткие, мягкие), аномалии, связанные с колебаниями корабля во внешней системе отсчета (измерения на подвижном носителе).
Питание магнитометров осуществлялось от источника постоянного напряжения (батарея аккумуляторов) 12 В. Кроме того подключался аккумулятор (в буфер) через зарядное устройство к сети переменного тока 220 В. В автономном режиме аккумулятор емкостью 90 А/ч обеспечивал до 30 сут бесперебойной работы системы сбора данных с парой трехкомпонентных магнитометров.
Сбор данных (через систему сбора) в автономном режиме производился на CF-память 133x. Емкость 4–32 Гб обеспечивала автономность сохранения информации в течение 30–60 сут при 9-ти задействованных каналах ввода данных. Кроме того, к системе сбора данных через последовательный порт дополнительно был подключен ПК, что обеспечивало сохранность данных при смене CF-накопителей и позволяло осуществлять визуальный контроль за работой аппаратуры.
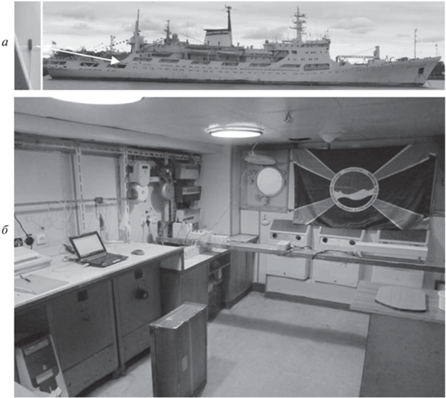
Синхронность записи данных по информационным каналам, не превышавшая 1 мс в течение длительных (100 и более сут) интервалов проведения измерений, обеспечивалась GPS-датчиком, закрепленным на фальшборте и соединенным с магнитометрическим комплексом через кабель-каналы (рис. 1а).
Рис. 1.
Магнитометрическая лаборатория на ОИС “Адмирал Владимирский”. (а) – положение лаборатории и датчика GPS на судне; (б) – вид лаборатории с двумя компонентными магнитометрами и системой регистрации данных.
Перед выходом в море была проведена поверка магнитометров в магнитно-ионосферной обс. Воейково, обеспечивающей отсутствие магнитных и индустриальных помех. В режиме калибровки в поле колец Гельмгольца были определены калибровочные коэффициенты, а также амплитудно- и фазо-частотная характеристики магнитометров в диапазоне периодов 0.1–500 с.
Вся магнитометрическая аппаратура находилась в магнитометрической лаборатории, расположенной в кормовой части судна (рис. 1а). В средней части лаборатории была установлена деревянная доска, которая была жестко закреплена между двух столов таким образом, чтобы обеспечить максимальное расстояние от стенок лаборатории и тем самым уменьшить их влияние на показания датчиков (рис. 1б).
В ходе экспедиции проводились компонентные измерения датчиками обоего типа. Систематический анализ и сопоставление этих измерений позволили контролировать работу аппаратуры.
2.2. Модульный магнитометр
Измерения модуля полного вектора МПЗ осуществлялось буксируемым магнитометром SeaSpy (Marine magnetics, Canada). Этот прибор был предоставлен компанией Росгеология АО “Южморгеология”, а измерения проводились опытным квалифицированным оператором, участвовавшим в экспедиции. Магнитометр буксировался на расстояние 300–400 м за судном. Это позволило избежать влияния магнитного поля корабля на результаты измерений, но повысило зависимость от погодных условий: при сильном волнении магнитометр за борт не спускали. Во время выполнения съемки в районе ЮМП погода благоприятствовала проведению измерений и магнитометр отработал полигон полностью.
2.3. Проверка согласованности результатов измерений компонентных магнитометров и их сопоставление с данными шхуны “Заря”
Сравнительный анализ результатов измерений, выполненных компонентными магнитометрами с торсионными и магниторезистивными датчиками, показал высокую степень их согласованности. О достаточной надежности приборов свидетельствует тот факт, что, как показала поверка в обс. Воейково, их параметры после полугодового плавания мало изменились. В качестве независимых данных для сравнения нами были использованы результаты измерений, выполненных на немагнитной шхуне “Заря”. Экспедиционные исследования геомагнитного поля на акватории морей и океанов проводились во время рейсов шхуны “Заря” в течение более чем 30 лет. На шхуне был установлен уникальный для своего времени комплекс приборов, позволявших измерять компоненты геомагнитного поля в движении [Морские …, 1986]. После перевода всех данных “Зари” в цифровой вид они стали легко доступны для сравнения [Баткова и др., 2007; db.izmiran]. В частности, во время пробного выхода “Адмирала Владимирского” проводились компонентные измерения в Финском заливе.
Маршрут пробного выхода определялся внешними условиями, но в архиве “Зари” были найдены три галса, близкие по координатам к профилю “Адмирала Владимирского”. На рисунке 2а показаны профиль пробного выхода ОИС “Адмирал Владимирский” и схема галсов шхуны “Заря”. Сравнение проводилось для Z-компоненты аномального магнитного поля. На рис. 2б в более крупном масштабе показана схема галсов и соответствующие им графики этой компоненты. Поскольку во время пробного выхода измерения велись в условиях штиля, измеренные значения Z-компоненты не содержали характерных для океана, связанных с качкой, короткопериодических возмущений, и фильтрация данных в этом случае не проводилась. Из рисунка 2б хорошо видно качественное совпадение формы, положения и структуры сложного аномального магнитного поля в Финском заливе. Расчеты показывают, что коэффициент корреляции варьируется от 0.65 до 0.85 несмотря на то, что точного совпадения маршрутов по координатам не было.
Рис. 2.
Сравнение Z-компоненты аномального магнитного поля по данным “Зари” и ОИС “Адмирал Владимирский”. (а) – схема галсов: черным цветом показан галс “Зари”, оттенками серого показано положение галсов ОИС “Адмирал Владимирский”; (б) – увеличенная схема галсов и Z-аномальное, цвет соответствует блоку (а); цифрами показан идентификационный номер галса.

Аналогичное сравнительное исследование было проведено для района Бискайского залива, который ОИС “Адмирал Владимирский” пересекал в конце рейса. Нам удалось подобрать два галса, выполненных в том же районе шхуной “Заря”. На рисунке 3а показана схема расположения галсов “Зари” и ОИС “Адмирал Владимирский”. На рисунке 3б дано сопоставление Z-компоненты аномального магнитного поля, полученного на шхуне “Заря” и ОИС “Адмирал Владимирский”. Как видно из этого рисунка, имеется качественное совпадение вертикальной компоненты аномального магнитного поля на профилях: идентифицируются все аномалии, для самых близких отрезков сохраняется соотношение магнитуд. Таким образом, качественное совпадение результатов измерения Z-компоненты на галсах, выполненных ОИС “Адмирал Владимирский” в начале и конце маршрута с данными шхуны “Заря”, говорит в пользу работоспособности магнитометров в течение всего маршрута.
Рис. 3.
Сравнение Z-компоненты аномального поля на профилях, выполненных шхуной “Заря” и ОИС “Адмирал Владимирский” в Бискайском заливе. (а) – схема галсов: серым цветом показан галс ОИС “Адмирал Владимирский”, черной сплошной и серой пунктирной линиями показаны галсы “Зари”; цифры – идентификационные номера галсов; (б) – Z аномальное, цвет и идентификационные цифры соответствуют блоку (а).

3. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЮМП ПО ДАННЫМ ЭКСПЕДИЦИИ ОИС “АДМИРАЛ ВЛАДИМИРСКИЙ”
3.1. Планирование полигона
Как уже отмечалось выше, одной из задач, стоявших перед экспедицией на ОИС “Адмирал Владимирский”, было экспериментальное определение положения ЮМП. При планировании морской магнитометрической съемки следовало иметь ввиду, что в районе Антарктиды предполагалось проведение обширных геофизических исследований, и задача локализации ЮМП была только одной из них. Это обуславливало ограниченность временнóго интервала, выделенного на решение поставленной задачи, а значит и размера полигона. Поэтому столь важным было определить как можно точнее предполагаемое положение ЮМП, имея при этом в виду влияние аномального поля и флуктуаций полюса в зависимости от геомагнитных вариаций. Перед началом экспедиции на основе коэффициентов прогноза глобальной модели геомагнитного поля IGRF-12 [IAGA, 2015] нами была получена оценка положения ЮМП. Уже после начала экспедиции в конце декабря 2019 г. IAGA были выпущены коэффициенты следующей генерации IGRF-13 [Alken et al., 2021]. Новое прогнозное положение ЮМП незначительно отличалось от первоначального. На рисунке 4 черной звездой показано положение первоначального прогноза и белой ‒ уточненного. На основе этих данных были определены местоположение полигона, объем магнитометрических исследований и необходимая для этого аппаратура, а также методика проведения измерений.
Рис. 4.
Ориентация полигона относительно горизонтальной компоненты геомагнитного поля. В градациях серого показана горизонтальная компонента, рассчитанная по модели IGRF-13, белым цветом показана схема полигона, черной звездочкой показано положение ЮМП по прогнозу IGRF-12, белой звездочкой – то же по модели IGR-F13.

На рисунке 4 также показана карта горизонтальной H-компоненты, рассчитанной по модели IGRF-13 в районе предполагаемого положения ЮМП. В соответствии со структурой изолиний H-компоненты галсы были заложены в направлении максимального градиента (SW–NE) и перпендикулярно к этому направлению (NW–SE). На этом полигоне размером 35 км × 30 км была выполнена непрерывная 500 км съемка в течение 27 ч, начиная с 03:00:00 UT 06.04.2020 г. и до 06:00:00 UT 07.04.2022 г. Погода благоприятствовала, забортный магнитометр отработал весь полигон. По данным ближайших магнитных обсерваторий магнитных возмущений во время проведения съемки не наблюдалось.
3.2. Определение положения ЮМП по данным модульных измерений
Обработка модульных данных осуществлялась по обычной схеме: удаление сбоев и фильтрация. Учет вариаций проводился методом увязки профилей за счет минимизации невязок в точках их пересечения. Задача получения оценки положения ЮМП по модульным данным сводится к линейной за счет перехода к дифференциалу $\delta T$ [Barraclough, 1974]. В основе лежит формула для бесконечно малых приращений.
Задав некоторые начальные значения компонент X0, Y0, Z0, вычисляем Т0 и находим разности с измеренными значениями. После чего представляем поправки δX, δY, и δZ в виде суммы сферических гармоник, и методом наименьших квадратов решаем получаемую систему линейных уравнений относительно коэффициентов ряда. По найденным коэффициентам вычисляем поправки δX, δY, δZ, и получаем результат первой итерации X1, Y1, Z1. Далее вычисляем Т1 и δT, и процедура повторяется до достижения минимальных отличий величины T для двух последовательных шагов. По конечным значениям компонент вычисляется горизонтальная составляющая, положение минимума которой дает оценку ЮМП. Методически требуется переход в локальную систему координат с центром в середине полигона и нормировка полиномов Лежандра по размеру области. В том случае, когда точка полюса лежит внутри области, краевыми эффектами можно пренебречь.
За счет повышения степени полинома можно достичь наилучшего представления в точках с измеренными значениями, но при этом могут возникать дополнительные экстремумы, связанные с локальными особенностями в данных. Пространственное распределение синтезированной H-компоненты при порядке сферического полинома n = 4 показано на рис. 5. Положение минимума отмечено серым кругом, там же для сравнения звездочкой показано положение ЮМП, вычисленного по модели IGRF-13. На рис. 5 хорошо видно наличие дополнительного локального минимума. Появление этого минимума может быть связано, например, с влиянием аномального магнитного поля на структуру горизонтальной компоненты. Однако более вероятно, что так проявляется интегральный результат суточного “блуждания” полюса, т.е. влияния остаточного вклада вариационной составляющей.

3.3. Определение положения ЮМП по данным измерения горизонтальной компоненты
В отличие от модульных измерений, выполняемых буксируемым датчиком магнитометра, компонентные датчики устанавливаются на борту носителя. В случае, когда съемка осуществляется на ферромагнитном судне, использование набортных магнитометров связано с большими трудностями [Nogi, 1999], поскольку требует учета влияния собственного магнитного поля корабля, которое имеет сложную конфигурацию [Нечаев и Григорьев, 1986]. Принято рассматривать измеряемое в корабельной системе координат магнитное поле T состоящим из трех составляющих
где TМПЗ вектор внешнего магнитного поля Земли, Th − часть магнитного поля судна, отвечающая остаточной намагниченности (твердое железо), Ts − часть поля, определяемая индуцированной намагниченностью судового железа (магнито-мягкое железо), зависящая от курса. При этом Ts, Th, и TМПЗ связаны линейным уравнением Пуассона [Яновский Б.М., 1953] где A – матрица (3 × 3) коэффициентов Пуассона. Элементы матрицы А и вектора Th называются параметрами Пуассона. Они постоянны для данной точки измерений при неизменности распределения ферромагнитных масс судна.Для получения данных о горизонтальной компоненте МПЗ необходимо выполнить специальные работы при соблюдении следующих условий: геомагнитная обстановка должна быть спокойной, градиент МПЗ в районе проведения работ мал. В результате мы получаем годограф – множество значений (X, Y) горизонтальных компонент, задающих точки на плоскости. При отсутствии шума и в случае справедливости линейной модели эти точки лежат на эллипсе общего вида. Рассчитать его параметры (координаты центра и полуоси a и b), максимально приближающие эллипс к реальным данным, можно с помощью метода наименьших квадратов. Такая аппроксимация может быть применена в случае, когда корабль проходит многоугольник, совершает циркуляцию или выполняет “звезду”, т.е. проходит через данную точку несколькими галсами с разными азимутами (теоретически для построения годографа достаточно знать горизонтальные компоненты на пяти курсах). Полученный эллипс, площадь которого равна πab, сдвигается в начало координат, поворачивается и масштабированием осей превращается в круг. Пример аппроксимации данных одной из циркуляций эллипсом приведен на рис. 6. Измеренные за время выполнения циркуляции значения компонент показаны на рисунке серым цветом, а аппроксимирующий эллипс – черным.
Рис. 6.
Годограф, построенный по результатам измерения X- и Y-компонент во время девиационных работ в Атлантическом океане. Серым цветом показан годограф, черным цветом показан аппроксимирующий эллипс и его оси.

В результате такого преобразования наблюденных величин мы получим величину H горизонтальной компоненты МПЗ с некоторым коэффициентом, определяемым матрицей Пуассона. Естественно предположить малость недиагональных членов матрицы, косвенным подтверждением чего является малое отклонение осей эллипсов, полученных при циркуляции, от координатных осей. Во всех проведенных работах это отклонение не превышало 4°. В этом случае определяются и сами горизонтальные компоненты с точностью до общего множителя, значение которого не меняется без существенного изменения магнитной обстановки, например, изменения МПЗ и/или магнитного поля судна. Детальное описание свойств годографа предполагается провести в отдельной работе.
За рейс было выполнено несколько работ такого рода на разных широтах. Географическое положение соответствующих точек показано на рис. 7а. Для каждой их этих точек был определен “радиус” годографа, т.е. радиус круга той же площади, что и соответствующий эллипс. Для выявления зависимости радиуса годографа от горизонтальной составляющей внешнего поля были использованы значения H-компоненты, вычисленные в точках циркуляций по модели IGRF-13. Эта зависимость приведена на рис. 7б. Цифрами устанавливается соответствие между точками рис. 7б и их географическим положением. Хорошо видно, что радиус годографа практически линейно зависит от H и стремится к 1000 нТл при приближении к полюсу. Такие значения радиуса около полюса говорят о существенной ошибке, причины которой авторам до конца не ясны. По-видимому, это связано с индуктивным влиянием вертикальной компоненты Z на очень маленькую горизонтальную составляющую. В частности, и при малых недиагональных элементах матрицы Пуассона наведенная горизонтальная компонента поля Ts велика относительно собственной горизонтальной компоненты МПЗ.
Рис. 7.
Изменение радиуса годографа в зависимости от значения горизонтальной компонент H в районах выполнения циркуляции. (а) – географическое положение точек выполнения девиационных работ, (б) – зависимость радиуса годографа от значения H, цифрами показаны номера точек.

Данные компонентных измерений на полигоне позволяют предложить следующий алгоритм определения положения ЮМП. Для построения годографа в качестве циркуляции были использованы отрезки галсов на участках разворотов. По значениям компонент в точках на этих дуговых отрезках строился годограф, который обрабатывался описанным выше способом. В результате были получены коэффициенты для масштабирования компонент X и Y, и далее рассчитывалась величина горизонтальной компоненты на галсах полигона. Положение ее локальных минимумов принималось за координаты виртуальных магнитных полюсов (ВМП). Оценку положения ЮМП получали осреднением ВМП. Положение ВМП и результат осреднения показаны на рис. 8. Стандартным методом получен 50%-й эллипс доверия. На этот же рисунок добавлено положение ЮМП, определенное по данным модульных измерений и по модели IGRF-13. Для сравнения туда же вынесено положение ЮМП, вычисленное по модели WMM2020 [Chulliat et al., 2015], учитывающей влияние аномальной части геомагнитного поля. Хорошо видно, что все четыре оценки положения ЮМП практически совпадают. Положение полюса, полученного по модульным данным, наиболее близко к полюсу WMM2020, что, по-видимому, связано с учетом в модульных измерениях аномального поля. Соответствующие значения координат приведены в табл. 2. Для дипольного приближения и полигона, охватывающего полюс, этот метод дает хорошие результаты.
Рис. 8.
Полученные оценки положения ЮМП. Черной линей показана схема полигона, кружками показаны ВМП, символами “звезда” показано положение ЮМП, полученное разными методами: 1 – результат осреднения ВМР, 2 – вычислено по IGRF-13, 3 – вычислено по модели WMM, 4 – получено по модульным данным; пунктирной линией показан эллипс 50% достоверности для полюса 1.

4. ЗАКЛЮЧЕНИЕ
В данной работе рассмотрены результаты магнитных измерений, выполненных в ходе юбилейной кругосветной экспедиции ОИС “Адмирал Владимирский” 2020 г. Магнитометрическая лаборатория была оснащена двумя трехкомпонентными магнитометрами с датчиками, работающими по разным физическим принципам, GPS-датчиком и буксируемым модульным магнитометром. Параллельное использование магнитометров обеспечивало контроль за стабильностью их работы. По результатам выполненных в разных широтах специальных работ (циркуляция, многоугольник, звезда) был разработан метод определения коэффициентов масштабирования компонент X, Y и получения горизонтальной компоненты. Этот метод был использован для обработки компонентных данных, полученных на специально заложенном полигоне в районе предполагаемого положения ЮМП. В результате получены оценки координат ЮМП по модульным и компонентным данным, которые оказались близки к положению полюса, вычисленного на основе модели IGRF-13.
Результаты этой работы показали работоспособность и надежность компонентных магнитометров, разработанных в СПбФ ИЗМИРАН. Хотя использование компонентных данных, полученных на ферромагнитном судне, сопряжено с большим количеством дополнительных трудностей и проблем, выяснилось, что при применении соответствующей обработки эти данные могут быть использованы для решения ряда геофизических задач. В частности, в работе предложен и успешно использован метод годографа для определения положения полюса. Предполагается возможным расширить круг геофизических задач, решаемых с помощью такого рода магнитометров. Для этого требуется как продолжение экспериментальных работ, так и совершенствование методики получения и обработки данных.
Полученные нами оценки координат ЮМП по данным экспедиций Кука и Беллинсгаузена (часть 1) и по данным экспедиции ОИС “Адмирал Владимирский” могут быть использованы для расширенного сравнительного анализа скоростей дрейфа ЮМП, вычисленных по сферическим моделям и определенных экспериментально.
Список литературы
‒ Баткова Л.А., Боярских В.Г., Демина И.М. Комплексная база данных геомагнитного поля по результатам по результатам съемок на немагнитной шхуне “Заря” // Геомагнетизм и аэрономия. Т. 47. № 4. С. 571–576. 2007.
‒ Золотайкин Б.М. На всю оставшуюся жизнь // Навигация и гидрография. № 25. С. 120‒128. 2007.
‒ Маргелов А. Магниторезистивные датчики положения компании Honeywell. // CHIP News – инженерная микроэлектроника. № 3. С. 30–34. 2005.
‒ Морские геомагнитные исследования на НИС “Заря” / Под ред. Почтарева В.И. M.: Наука. 184 с. 1986.
‒ Нечаев П.А., Григорьев В.В. Магнитно-компасное дело. М.: Транспорт. 238 с. 1986.
‒ Черноусов А.А. Результаты кругосветной антарктической экспедиции гидрографической службы Черноморского флота 1982–1983 гг. как подтверждение итогов Первой русской антарктической экспедиции Беллинсгаузена–Лазарева / Сб. докл. научной сессии ГУАП, Санкт-Петербург, 14–22 апреля 2020 года, Санкт-Петербургский государственный университет аэрокосмического приборостроения. С. 177‒180. 2020.
‒ Яновский Б.М. Земной магнетизм. Л.: Изд. ЛГУ. 592 с. 1978.
‒ Alken P., Thébault E., Beggan C.D. et al. International Geomagnetic Reference Field: the thirteenth generation // Earth Planets Space. V. 73:49. 2021. https://doi.org/10.1186/s40623-020-01288-x
‒ Barraclough D.R. Spherical harmonic analyses of the geomagnetic field for eight epochs between 1600 and 1910. // Geophys. J. R. Astr. Soc. V. 36. P. 497–513. 1974.
‒ Barton C.E., Hutchinson R., Quilty P., Seers K., Stone T. Quest for the magnetic poles: Relocation of the South Magnetic Pole at sea. /1986. BMR Record 1987/3. Australian Geological Survey Organisation. Camberra. 23 p. 1987.
‒ Barton C. Survey tracks current position of South Magnetic Pole // EOS. Transactions of the American Geophysical Union. V. 83(27). P. 291. 2002.
‒ Burrows A.L. Location of the south magnetic pole // N. Z. J. Geol. Geophys. V. 6. P. 454–464. 1963.
‒ Chulliat A., Macmillan S., Alken P., Beggan C., Nair M., Hamilton B., Woods A., Ridley V., Maus S., Thomson A. The US/UK World Magnetic Model for 2015–2020: Technical Report. / National Geophysical Data Center. NOAA. 2015. https://doi.org/10.7289/v5tb14V7
db.izmiran. http://db.izmiran.nw.ru/downloads
IAGA 2015. https://www.ngdc.noaa.gov/IAGA/vmod/igrf. html
‒ Knapp G.D. Historical notes on determining the position of the south magnetic dip pole. / U.S.C.G.S. ESSA. Rockville. Maryland. 25 p. 1969.
‒ Kopytenko Yu.A., Kopytenko E.A., Zaitsev D.B., Voronov P.M., Amosov L.G. Magnetovariation complex MVC-2 / Proc. of the VI-th Workshop on Geomagnetic Observatory Instr., Data Acquisit. and Processing. Sept. 18‒24. 1994. Dourbes. Belgium. P. 10. 1994.
‒ Nogi Y., Kaminuma K. Measurements of vector magnetic anomalies on board the icebreaker Shirase and the magnetization of the ship // Annali di Geofisica. V. 42. Is. 2. P. 161–170. 1999.
‒ Wessel P., Luis J.F., Uieda L., Scharroo R., Wobbe F., Smith W.H.F., Tian D. The Generic MappingTools version 6. // Geochem. Geophys. Geosyst. V. 20. P. 5556–5564. https://doi.org/10.1029/2019GC008515. 2019.
Дополнительные материалы отсутствуют.
Инструменты
Геомагнетизм и аэрономия