

Приборы и техника эксперимента, 2023, № 2, стр. 46-51
АЛГОРИТМ РАБОТЫ ЦИФРОВОГО МОДУЛЯ УСТРОЙСТВА ДЛЯ ДЕТЕКТИРОВАНИЯ ПРОЛЕТНЫХ ИМПУЛЬСОВ
К. И. Сухачев a, А. М. Телегин a, *, Д. П. Григорьев a, Д. А. Шестаков a, А. С. Дорофеев a
a Самарский национальный исследовательский университет им. академика С.П. Королева
443086 Самара, Московское ш., 34,
Россия
* E-mail: talex85@mail.ru
Поступила в редакцию 04.07.2022
После доработки 29.07.2022
Принята к публикации 26.09.2022
- EDN: PWFVXL
- DOI: 10.31857/S003281622301024X
Аннотация
Описаны метод и устройство детектирования пролетных импульсов в системе управления линейного электродинамического ускорителя. Представлены структура адаптивного детектора частиц и принцип, позволяющий повысить достоверность детектирования импульса ожидаемой формы на фоне шумов различной природы происхождения.
ВВЕДЕНИЕ
Для работы линейного электродинамического ускорителя, применяемого для моделирования воздействия микрометероидов и частиц космического мусора на элементы конструкции космического аппарата [1–4], необходимо точно детектировать момент пролета заряженной микрочастицей центра индукционного датчика. В работах [1–4] использовались усилители и компараторы, выходы которых были нагружены на оптический передатчик. Однако полезный сигнал с датчиков пролетных импульсов сильно зашумлен и, в зависимости от расположения в ускорителе, может содержать как низкочастотную составляющую, возникающую, например, из-за работы насосов, создающих вакуум внутри тракта ускорителя, так и различные шумы от импульсных преобразователей, которые используются в системе зарядки и ускорения микрочастиц. Все датчики подвержены помехам, возникающим в электродинамической части при переключении полярности напряжения на трубках дрейфа, поэтому, при понижении уровня срабатывания компаратора для детектирования наиболее мелких частиц, возможны ложные срабатывания, что может затруднить работу системы управления ускорителем. Типичные сигналы с усилителей пролетных датчиков представлены на рис. 1.

ОПИСАНИЕ ПРИНЦИПА РАБОТЫ ДАТЧИКА
Принцип работы индукционного датчика следующий. При пролете заряженной микрочастицы через датчик в измерительном электроде индукционного датчика начинает протекать ток, зависящий в соответствии с теоремой Рамо–Шокли от заряда, скорости микрочастицы и расстояния от микрочастицы до датчика как:
где (${\mathbf{V}} \cdot {{{\mathbf{E}}}_{k}}$) – скалярное произведение вектора скорости и эффективной напряженности; $~{{{\mathbf{E}}}_{k}}$ – эффективная (взвешенная) напряженность поля в точке, где находится заряд Q в момент времени t. Более подробно форма таких импульсов рассмотрена в работах [1, 5, 6].Если расположить два индукционных датчика на определенном расстоянии друг от друга, то по импульсам, возникающим на этих датчиках при пролете микрочастицы, можно определить скорость этой микрочастицы при известном расстоянии между датчиками.
Для более точного детектирования момента пролета частицей датчика предлагается использовать оцифровку сигнала с усилителей с последующей обработкой полученного сигнала в реальном времени с возможностью адаптации под параметры входного сигнала. Для максимально точного детектирования необходимо применять достоверные знания о форме пролетного импульса с датчиков. Для этого в детектор частиц необходимо ввести высокочастотные микросхемы АЦП и ПЛИС для реализации алгоритмов цифровой обработки сигнала (ЦОС). Так как пролетные датчики в ускорителе частиц используются попарно, что необходимо для определения скорости частицы при известном расстоянии между датчиками, возможна реализация сдвоенного детектора частиц, функциональная схема которого будет иметь вид, показанный на рис. 2.
Рис. 2.
Структурная схема сдвоенного адаптивного детектора частиц. У – усилитель; АЦП – аналого-цифровой преобразователь (A/N – преобразование аналогового сигнала (A) в цифровой код размерностью N); Д – драйвер, ОПТ – оптопередатчик; ПЛИС – программируемая логическая интегральная схема.

На рис. 3 представлен внешний вид разработанного цифрового модуля детектора, рассчитанного на 4 канала. Модуль испытывался на частоте тактирования ПЛИС и АЦП 50 МГц. Непосредственно на 4-канальный детектор ресурсов ПЛИС было затрачено менее 10%, а всего – менее 25%.

Для цифровой обработки сигнала предлагается использовать скользящее среднее с переменным уровнем усреднения для первого этапа с последующим после усреднения применением метода “Z-Scoreˮ и достоверных знаний о форме ожидаемого сигнала [7–9]. Параметры определения границ допустимого отклонения (аналог среднеквадратического отклонения (СКО)) и временной допуск превышения этого отклонения являются настраиваемыми параметрами.
Для иллюстрации метода на рис. 4 показан результат обработки с использованием ПЛИС реального входного сигнала с пролетного датчика (входной сигнал показан ранее на рис. 1). Так, на рис. 4 показаны результаты определения момента пролета частицы при изменении границ допустимого отклонения и параметров усреднения. Сначала проводилась оценка уровня шумов реального сигнала с датчиков, которая потом корректировалась по мере необходимости. Видно, что при первом (рис. 4а) и втором (рис. 4б) вариантах параметров пролет частицы не зафиксирован, однако при третьем (рис. 4в) варианте частица детектирована.
Рис. 4.
Иллюстрация метода цифровой обработки сигнала. Стрелкой показано направление улучшения алгоритма обработки экспериментальных данных.

Предложенный метод реализован на языке HDLVerilog, обобщенный алгоритм представлен на рис. 5, а детализированные фрагменты алгоритма, отвечающие непосредственно за детектирование момента пролета частицы, показаны на рис. 6.

Рис. 6.
Детализированные фрагменты общего алгоритма: a – алгоритм первичной фильтрации (признак А); б – алгоритм оценки СКО (признак В); в – алгоритм детектирования пролета частицы по трем признакам.
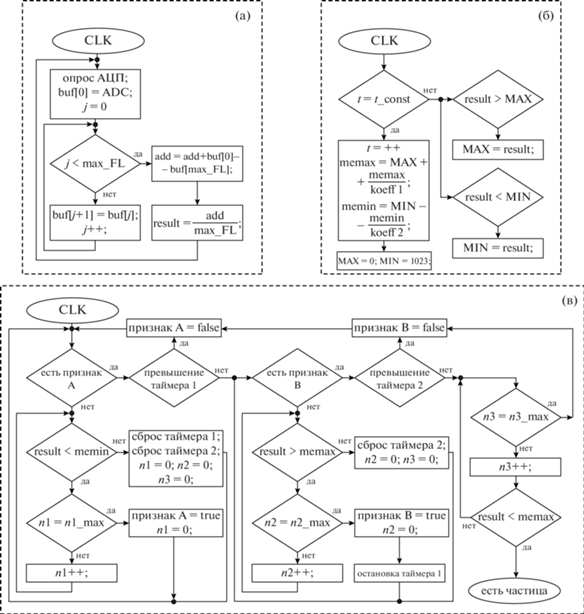
Суть алгоритма сводится к последовательному обнаружению признаков пролетного импульса. Сначала регистрируется событие, соответствующее выходу отфильтрованного сигнала с датчиков за нижнюю границу СКО (первый признак). Далее осуществляется измерение длительности данного события, и, если длительность превышает заданный параметр, начинается процесс детектирования выхода отфильтрованного сигнала за верхнюю границу СКО (второй признак) также с определением минимально необходимой длительности (третий признак).
На рис. 7 приведен реальный результат работы детектора с зашумленным сигналом с единичными всплесками с амплитудой, значительно превышающей полезный сигнал.

Разработанное HDL-описание оптимизировано для реализации в ПЛИС CycloneIII…C8 и более старших моделях с частотой тактирования от 88.6 МГц. HDL-описание воспроизводит все необходимые вычисления алгоритма “Z-Scoreˮ и скользящее усреднение до X64 в реальном времени, при этом общий занимаемый объем памяти составляет примерно 1750 логических элементов, что позволяет использовать младшие микросхемы любого семейства ПЛИС фирмы ALTERA или XILINX, а также некоторые модели CPLD данных производителей. Предлагаемый алгоритм детектирования после настройки коэффициентов устойчив к единичным всплескам сигнала, которые не фильтруются усреднением, и позволяет регистрировать пролетные импульсы от движения заряженных микрочастиц.
ВЫВОДЫ
Представленный метод позволил повысить достоверность определения момента пролета заряженной микрочастицей индукционных датчиков, входящих в состав системы управления линейного электродинамического ускорителя. По сравнению с существующей версией датчиков, детектирующих пролет частицы по превышению амплитуды, достоверность определения момента пролета микрочастицы представленным методом увеличена на 90%, так как метод позволяет полностью исключить срабатывание как по случайным электростатическим разрядам, так и по наводкам от переключений высокого ускоряющего напряжения в линейном электродинамическом ускорителе, а также устранить влияние низкочастотной составляющей от вспомогательного оборудования (асинхронных двигателей, насосов и т.д.). Разработаны и испытаны цифровой модуль детектора и функционально законченное HDL-описание. Испытание работоспособности метода проводилось как на модели зашумленного сигнала с индукционных датчиков, так и на записи реального сигнала с ранее установленных в ускоритель усилителей.
Список литературы
Телегин А.М., Пияков А.В. // ПТЭ. 2017. № 6. С. 101. https://doi.org/10.7868/S0032816217060131
Семкин Н.Д., Воронов К.Е., Телегин А.М., Изюмов М.В., Сухачев К.И. // Физика волновых процессов и радиотехнические системы. 2012. № 1. С. 79.
Семкин Н.Д., Пияков А.В., Воронов К.Е., Богоявленский Н.Л., Горюнов Д.В. // ПТЭ. 2007. № 2. С. 140.
Piyakov A.V., Rodin D.V., Rodina M.A., Telegin A.M., Kondratiev S.N. // CEUR Workshop Proceedings. 2018. V. 2212. P. 158. https://doi.org/10.18287/1613-0073-2018-2212-158-164
Герштейн Г.М. Моделирование полей методом электростатической индукции. М.: Наука, 1970.
Иновенков А.Н., Константинов О.В., Пирогов В.И. // ЖТФ. 1993. Т. 63. Вып. 9. С. 1.
Thomas E., Auer S., Drake K., Horányi M., Munsat T., Shu A. // Planetary and Space Science. 2013. V. 89. P. 71. https://doi.org/10.1016/j.pss.2013.09.004
Brakel J.P.G. Robust peak detection algorithm using z-scores. Stack Overflow. 2014. URL: https://stackoverflow.com/questions/22583391/peak-signal-detection-in-realtime-timeseries-data/22640362#22640362 (Дата обращения: 20.05.2022).
Каламбет Ю.А., Мальцев С.А., Козьмин Ю.П. // Заводская лаборатория. Диагностика материалов. 2015. Т. 81. № 1–I. С. 69.
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента