

Прикладная математика и механика, 2023, T. 87, № 1, стр. 3-18
Один класс резонансных прецессионных движений твердого тела под действием трех однородных силовых полей
1 Государственное бюджетное учреждение “Институт прикладной математики и механики”
Донецк, Россия
* E-mail: gvgorr@gmail.com
Поступила в редакцию 05.09.2022
После доработки 22.11.2022
Принята к публикации 22.11.2022
- EDN: HVLUQK
- DOI: 10.31857/S0032823523010071
Аннотация
В статье рассмотрена задача о движении твердого тела с неподвижной точкой в силовом поле, которое является суперпозицией трех однородных силовых полей. Исследованы условия существования прецессионных движений, характеризующихся свойством: скорость прецессии тела в два раза больше скорости собственного вращения. Показано, что тело имеет динамическую симметрию относительно оси, образующей постоянный угол с неподвижным в пространстве вектором. В случае сферического распределения масс тела он равен ${\text{arccos}}\tfrac{1}{4}$. Решение уравнений движения тела описывается эллиптическими функциями времени.
1. Введение. Прецессионные движения тела, имея достаточно широкий диапазон применения в приложениях (например, в теории гироскопических систем [1]), большой интерес представляют в теоретических исследованиях, поскольку они дают возможность моделировать эти движения под действием различного класса сил. В динамике тяжелого твердого тела существуют регулярные прецессии гироскопа Лагранжа относительно вертикали [2], регулярные прецессии тела относительно наклонной оси [3], полурегулярные прецессии [4] и прецессии общего вида в решении В. Гесса [5] и прецессии общего вида [6]. Но, как показано в [4], тяжелое твердое тело не может совершать полурегулярную прецессию второго типа. В обобщенных задачах динамики твердого тела (задаче о движении гиростата под действием потенциальных и гироскопических сил с постоянным и переменным гиростатическим моментом, задаче о движении гиростата в магнитном поле с учетом эффекта Барнетта–Лондона) получены многочисленные классы прецессий [7–9]. Определенный интерес представляют и исследования прецессий системы связанных твердых тел [10], состоящей из гироскопа Лагранжа и Гесса, а также в задаче о движении твердого тела с жидким заполнением [11–14].
В задаче о движении твердого тела в силовом поле, которое является суперпозицией трех однородных силовых полей, известны результаты, посвященные рассмотрению только регулярных прецессий [15–17]. В данной статье изучается класс прецессий общего вида при дополнительном предположении о том, что скорость прецессии тела в два раза больше скорости собственного вращения (он может быть отнесен к резонансным прецессиям тела). Из трех направлений, которые характеризуют результирующие силы однородных полей, выделено приоритетное направление с единичным вектором ${\mathbf{\gamma }}$. Поскольку движение тела является прецессией, то постоянен угол между вектором ${\mathbf{\gamma }}$ и вектором ${\mathbf{a}}$, неизменно связанным с твердым телом. В результате проведенных исследований по нахождению условий существования резонансных прецессионных движений установлено, что векторы, определяющие центры приложения сил других направлений ${\mathbf{\gamma }}_{1}^{{}}$, ${\mathbf{\gamma }}_{2}^{{}}$ ортогональны. Получено алгебраическое уравнение второго порядка на угол нутации, коэффициенты которого зависят от главных моментов инерции тела. Если тело имеет сферическое распределение масс, то этот угол равен $\arccos \frac{1}{4}$. Нахождение основных переменных уравнений движения сведено к обращению эллиптических интегралов.
2. Постановка задачи. Рассмотрим движение твердого тела, имеющего неподвижную точку, в силовом поле, которое является суперпозицией трех однородных и постоянных силовых полей. Обозначим через ${\mathbf{\gamma }}$, ${\mathbf{\gamma }}_{{}}^{{(1)}}$, ${\mathbf{\gamma }}_{{}}^{{(2)}}$ единичные векторы, характеризующие направления сил ${\mathbf{P}},{{{\mathbf{P}}}_{1}},{{{\mathbf{P}}}_{2}}$ каждого из полей; $C,{{C}_{1}},{{C}_{2}}$ – центры приведения сил; ${\mathbf{s}} = P\,{\mathbf{OC}}$, ${\mathbf{r}} = {{P}_{1}}\,{\mathbf{O}}{{{\mathbf{C}}}_{1}}$, ${\mathbf{p}} = {{P}_{2}}\,{\mathbf{O}}{{{\mathbf{C}}}_{2}}$; $Oxyz$ – подвижная система координат, $O$ – неподвижная точка. Пусть тензор инерции тела в системе $Oxyz$ имеет значение $A = {\text{(}}A_{{ij}}^{{}}{\text{)}}$ $(i,j = \overline {1,3} )$. Тело вращается вокруг точки $O$ с угловой скоростью ${\mathbf{\omega }} = {\text{(}}\omega _{1}^{{}}{\mathbf{i}}_{1}^{{}} + \omega _{2}^{{}}{\mathbf{i}}_{2}^{{}} + \omega _{3}^{{}}{\mathbf{i}}_{3}^{{}}{\text{)}}$ (${\mathbf{i}}_{1}^{{}},{\mathbf{i}}_{2}^{{}},{\mathbf{i}}_{3}^{{}}$ – единичные векторы системы $Oxyz$). Для векторов ${\mathbf{s}},{\mathbf{r}},{\mathbf{p}}$ запишем соотношения
(2.1)
${\mathbf{s}} = s_{1}^{{}}{\mathbf{i}}_{1}^{{}} + s_{2}^{{}}{\mathbf{i}}_{2}^{{}} + s_{3}^{{}}{\mathbf{i}}_{3}^{{}},\quad {\mathbf{r}}{\text{ }} = r_{1}^{{}}{\mathbf{i}}_{1}^{{}} + r_{2}^{{}}{\mathbf{i}}_{2}^{{}} + r_{3}^{{}}{\mathbf{i}}_{3}^{{}},\quad {\mathbf{p}} = p_{1}^{{}}{\mathbf{i}}_{1}^{{}} + p_{2}^{{}}{\mathbf{i}}_{2}^{{}} + p_{3}^{{}}{\mathbf{i}}_{3}^{{}}$Тогда уравнения движения тела представим в виде
(2.2)
$A{\mathbf{\dot {\omega }}} = A{\mathbf{\omega }} \times {\mathbf{\omega }} + {\text{s}} \times {\mathbf{\gamma }} + {\mathbf{r}} \times {\mathbf{\gamma }}_{{}}^{{(1)}} + {\mathbf{p}} \times {\mathbf{\gamma }}_{{}}^{{(2)}}$(2.3)
${\mathbf{\dot {\gamma }}} = {\mathbf{\gamma }} \times {\mathbf{\omega }},\quad {\mathbf{\dot {\gamma }}}_{{}}^{{(1)}} = {\mathbf{\gamma }}_{{}}^{{(1)}} \times {\mathbf{\omega }},\quad {\mathbf{\dot {\gamma }}}_{{}}^{{(2)}} = {\mathbf{\gamma }}_{{}}^{{(2)}} \times {\mathbf{\omega }},$(2.4)
${\mathbf{\gamma }} \cdot {\mathbf{\gamma }}_{{}}^{{(1)}} = 0,\quad {\mathbf{\gamma }}_{{}}^{{(2)}} = {\mathbf{\gamma }} \times {\mathbf{\gamma }}_{{}}^{{(1)}},\quad \left| {\mathbf{\gamma }} \right| = 1,\quad \left| {{\mathbf{\gamma }}_{{}}^{{(1)}}} \right| = 1,$Рассмотрим прецессии тела относительно вектора ${\mathbf{\gamma }}$. Они характеризуются инвариантным соотношением (ИС)
(2.5)
${\mathbf{a}} \cdot {\mathbf{\gamma }} = a_{{\text{0}}}^{{}}\quad (a_{{\text{0}}}^{{}} = \cos \theta _{{\text{0}}}^{{}}),$Переменные $\varphi ,\psi $ и постоянную $\theta _{{\text{0}}}^{{}}$ можно трактовать, как углы Эйлера. Используя метод [7], запишем значение вектора ${\mathbf{\gamma }}_{{}}^{{(i)}}$:
(2.7)
${\mathbf{\gamma }}_{{}}^{{(1)}} = b_{0}^{{}}[a_{{\text{0}}}^{{}}{\mathbf{\gamma }}\sin (\psi + \psi _{0}^{{}}) - {\mathbf{a}}\sin (\psi + \psi _{0}^{{}}) + ({\mathbf{a}} \times {\mathbf{\gamma }})\cos (\psi + \psi _{0}^{{}})],$Значение вектора ${\mathbf{\gamma }}_{{}}^{{(2)}}$ найдем по второй формуле системы (2.4):
(2.8)
${\mathbf{\gamma }}_{{}}^{{(2)}} = b_{0}^{{}}\left[ {{\mathbf{a}}\cos \left( {\psi + {{\psi }_{0}}} \right) - {{a}_{0}}{\mathbf{\gamma }}\cos \left( {\psi + {{\psi }_{0}}} \right) + ({\mathbf{a}} \times {\mathbf{\gamma }})\sin \left( {\psi + {{\psi }_{0}}} \right)} \right]$Таким образом, при получении (2.7), (2.8) полагалось, что ${\mathbf{a}} \times {\mathbf{\gamma }} \ne {\mathbf{0}}$, то есть случай равномерных вращений тела исключаем из рассмотрения. Подвижную систему координат выберем следующим образом: направим вектор $\,{\mathbf{i}}_{3}^{{}}$ по вектору ${\mathbf{a}}$. Тогда на основании ИС (2.5), первого уравнения из (2.3) имеем [6, 7]
(2.9)
${\mathbf{\gamma }} = a_{0}^{'}\sin \varphi \cdot {\mathbf{i}}_{1}^{{}} + a_{0}^{'}\cos \varphi \cdot {\mathbf{i}}_{2}^{{}} + a_{{\text{0}}}^{{}}{\mathbf{i}}_{3}^{{}}\quad \left( {{{{\mathbf{i}}}_{3}} = {\mathbf{a}}} \right)$На основании (2.6), (2.9) запишем компоненты $\omega _{1}^{{}},\omega _{2}^{{}},\omega _{3}^{{}}$ вектора ${\mathbf{\omega }}$:
(2.10)
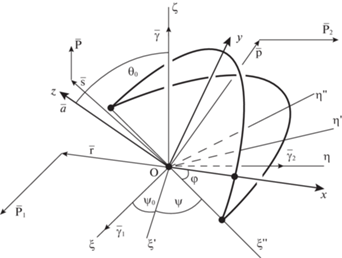
$\omega _{1}^{{}} = a_{0}^{'}\dot {\psi }\sin \varphi ,\quad \omega _{2}^{{}} = a_{0}^{'}\dot {\psi }\cos \varphi ,\quad \omega _{3}^{{}} = \dot {\varphi } + a_{0}^{{}}\dot {\psi }$На рис. 1 приведена геометрическая трактовка прецессий тела относительно вектора ${\mathbf{\gamma }}$ ($O\xi \eta \zeta $ – неподвижная система координат).
Замечание 1. При описании кинематических свойств в виде соотношений (2.5)–(2.10) использован метод [7, 8], который отличается от методов, применяемых в [11, 14–17].
Замечание 2. Уравнения (2.2), (2.3) имеют интеграл энергии
(2.11)
$A{\mathbf{\omega }} \cdot {\mathbf{\omega }} - 2\left( {{\mathbf{s}} \cdot {\mathbf{\gamma }} + {\mathbf{r}} \cdot {\mathbf{\gamma }}_{{}}^{{(1)}} + {\mathbf{p}} \cdot {\mathbf{\gamma }}_{{}}^{{(2)}}} \right) = {\text{2}}E,$3. Преобразование уравнения (2.2) на ИС (2.5). Внесем в уравнение (2.2) значение ${\mathbf{\omega }}$ из (2.6) и рассмотрим полученное уравнение в базисе ${\mathbf{a}},{\mathbf{\gamma }},{\mathbf{a}} \times {\mathbf{\gamma }}$ с учетом (2.7), (2.8):
(3.1)
$\begin{gathered} \ddot {\varphi }(A{\mathbf{a}} \cdot {\mathbf{a}}) + {{\ddot {\psi }}}(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) - \dot {\psi }_{{}}^{2}[{\mathbf{a}} \cdot (A{\mathbf{\gamma }} \times {\mathbf{\gamma }}){\text{]}} - {\text{[}}{\mathbf{a}} \cdot ({\mathbf{s}} \times {\mathbf{\gamma }})] - \\ - \;b_{0}^{{}}\sin \left( {{{\psi }} + {{{{\psi }}}_{0}}} \right) \cdot \left\{ {{{a}_{0}}[{\mathbf{a}} \cdot ({\mathbf{r}} \times {\mathbf{\gamma }}) - {\mathbf{a}} \cdot {\mathbf{p}}] + {\mathbf{p}} \cdot {\mathbf{\gamma }}} \right\} - \\ - \;b_{0}^{{}}\cos \left( {{{\psi }} + {{{{\psi }}}_{0}}} \right) \cdot \left\{ {{\mathbf{r}} \cdot {\mathbf{\gamma }} - {{a}_{0}}[({\mathbf{r}} \cdot {\mathbf{a}}) + {\mathbf{a}} \cdot ({\mathbf{p}} \times {\mathbf{\gamma }})]} \right\} = 0 \\ \end{gathered} $(3.2)
$\begin{gathered} \ddot {\varphi }(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) + \ddot {\psi }(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) + 2\dot {\varphi }\dot {\psi }[{\mathbf{a}} \cdot (A{\mathbf{\gamma }} \times {\mathbf{\gamma }}){\text{]}} + \dot {\varphi }_{{}}^{2}{\text{[}}{\mathbf{\gamma }} \cdot ({\mathbf{a}} \times A{\mathbf{a}})] - \\ - \;b_{0}^{{}}\sin \left( {\psi + {{\psi }_{0}}} \right) \cdot \left\{ {{{a}_{0}}({\mathbf{p}} \cdot {\mathbf{\gamma }}) + [{\mathbf{a}} \cdot ({\mathbf{r}} \times {\mathbf{\gamma }}) - } \right. \\ \left. { - \;({\mathbf{a}} \cdot {\mathbf{p}})} \right\} - b_{0}^{{}}\cos \left( {\psi + {{\psi }_{0}}} \right) \cdot \left\{ {{{a}_{0}}({\mathbf{r}} \cdot {\mathbf{\gamma }}) - ({\mathbf{a}} \cdot {\mathbf{r}}) + [{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times {\mathbf{p}})]} \right\} = 0 \\ \end{gathered} $(3.3)
$\begin{gathered} \ddot {\varphi }[A{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times {\mathbf{a}})] + \ddot {\psi }[A{\mathbf{\gamma }} \cdot ({\mathbf{a}} \times {\mathbf{\gamma }})] + \dot {\varphi }\dot {\psi }\left[ {2(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) - a_{{\text{0}}}^{{'2}}{\text{Sp}}(A) - 2{{a}_{0}}(A{\mathbf{a}} \cdot {\mathbf{\gamma }})} \right] + \\ + \;\dot {\varphi }_{{}}^{2}\left[ {(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) - {{a}_{0}}(A{\mathbf{a}} \cdot {\mathbf{a}})} \right] + \dot {\psi }_{{}}^{2}\left[ {{{a}_{0}}{\text{(}}A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) - (A{\mathbf{a}} \cdot {\mathbf{\gamma }})} \right] - ({\mathbf{a}} \cdot {\mathbf{s}}) + {{a}_{0}}({\mathbf{s}} \cdot {\mathbf{\gamma }}) - \\ - \;a_{0}^{'}\left[ {({\mathbf{p}} \cdot {\mathbf{\gamma }})\cos \left( {\psi + {{\psi }_{0}}} \right) - ({\mathbf{r}} \cdot {\mathbf{\gamma }})\sin \left( {\psi + {{\psi }_{0}}} \right)} \right] = 0, \\ \end{gathered} $По аналогии с (3.1)–(3.3) распишем интеграл (2.11) на ИС (2.5), (2.6):
(3.4)
$\begin{gathered} (A{\mathbf{a}} \cdot {\mathbf{a}})\dot {\varphi }_{{}}^{2} + 2(A{\mathbf{a}} \cdot {\mathbf{\gamma }})\dot {\varphi }\dot {\psi } + (A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }})\dot {\psi }_{{}}^{2} - 2\left\{ {{\text{(}}{\mathbf{s}} \cdot {\mathbf{\gamma }}) + {{b}_{0}}\left[ {\sin \left( {\psi + {{\psi }_{0}}} \right)} \right.} \right. \cdot \left( {{{a}_{0}}{\text{(}}{\mathbf{r}} \cdot {\mathbf{\gamma }})} \right. - \\ \left. {\left. { - \;({\mathbf{r}} \cdot {\mathbf{a}}) - {\mathbf{p}} \cdot ({\mathbf{\gamma }} \times {\mathbf{a}})) + \cos (\psi + {{\psi }_{0}}) \cdot ({\mathbf{a}} \cdot {\mathbf{p}} - {{a}_{0}}{\text{(}}{\mathbf{p}} \cdot {\mathbf{\gamma }}) + {\mathbf{r}} \cdot ({\mathbf{a}} \times {\mathbf{\gamma }}))} \right]} \right\} = 2E \\ \end{gathered} $Введем обозначения
(3.5)
$f_{3}^{{}}(\varphi ) = a_{0}^{'}\left[ {\left( {{{p}_{1}} - {{a}_{0}}{{r}_{2}}} \right)\sin \varphi + \left( {{{p}_{2}} + {{a}_{0}}{{r}_{1}}} \right)\cos \varphi } \right]$Сначала запишем интеграл (3.4) в силу (3.5):
(3.6)
$\begin{gathered} (A{\mathbf{a}} \cdot {\mathbf{a}})\dot {\varphi }_{{}}^{2} + 2(A{\mathbf{a}} \cdot {\mathbf{\gamma }})\dot {\varphi }\dot {\psi } + (A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }})\dot {\psi }_{{}}^{2} - \\ - \;2\left[ {{{f}_{0}}(\varphi ) + {{b}_{0}}\left( {{{f}_{1}}(\varphi )\sin (\psi + {{\psi }_{0}}) + {{f}_{2}}(\varphi )\cos \left( {\psi + {{\psi }_{0}}} \right)} \right)} \right] = 2E \\ \end{gathered} $Затем обратимся к уравнениям (3.1)–(3.3). На основании (3.5) имеем
(3.7)
$\begin{gathered} \ddot {\varphi }(A{\mathbf{a}} \cdot {\mathbf{a}}) + \ddot {\psi }(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) - \dot {\psi }_{{}}^{2}[{\mathbf{a}} \cdot (A{\mathbf{\gamma }} \times {\mathbf{\gamma }}){\text{]}} + \tilde {f}_{0}^{{}}(\varphi ) - \\ - \;b_{0}^{{}}\left( {{{f}_{3}}(\varphi )\sin \left( {\psi + {{\psi }_{0}}} \right) + {{f}_{4}}(\varphi )\cos \left( {\psi + {{\psi }_{0}}} \right)} \right) = 0 \\ \end{gathered} $(3.8)
$\begin{gathered} \ddot {\varphi }(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) + \ddot {\psi }(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) - 2\dot {\varphi }\dot {\psi }{\text{[}}{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{\gamma }})] - \dot {\varphi }_{{}}^{2}[{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{a}})] - \\ - \;b_{0}^{{}}\left[ {{{f}_{1}}(\varphi )\cos \left( {\psi + {{\psi }_{0}}} \right) - {{f}_{2}}(\varphi )\sin \left( {\psi + {{\psi }_{0}}} \right)} \right] = 0 \\ \end{gathered} $(3.9)
$\begin{gathered} \dot {\varphi }{\text{[}}{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{a}})] + \ddot {\psi }[{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{\gamma }}){\text{]}} + \dot {\varphi }\dot {\psi }[2(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) - \\ - \;a_{0}^{{'2}}\operatorname{Sp} (A) - 2a_{{\text{0}}}^{{}}(A{\mathbf{a}} \cdot {\mathbf{\gamma }})] + \dot {\varphi }_{{}}^{2}\left[ {(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) - {{a}_{0}}(A{\mathbf{a}} \cdot {\mathbf{a}})} \right] + \\ + \;\dot {\psi }_{{}}^{2}\left[ {{{a}_{0}}(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) - (A{\mathbf{a}} \cdot {\mathbf{\gamma }})} \right] + f_{5}^{{}}(\varphi ) + f_{6}^{{}}(\varphi )\sin \left( {\psi + {{\psi }_{0}}} \right) + \\ + \;f_{7}^{{}}(\varphi )\cos \left( {\psi + {{\psi }_{0}}} \right) = 0 \\ \end{gathered} $Представление соотношений (3.1)–(3.4) в виде (3.6)–(3.9) связано с решением задачи о замене одного из уравнений (3.7)–(3.9) интегралом (3.6). Вычислим производную по времени от левой части уравнения (3.6), используя соотношения
Если учесть в полученном уравнении соотношения (3.7), (3.8), то имеем тождество. Данное свойство выполняется в случае, когда одно из уравнений (3.7), (3.8) не вырождается в тождество (см. разд. 6, уравнения (6.2)). Исключая этот вариант, можно рассматривать интеграл (3.6) совместно с одним из указанных уравнений, но уравнение (3.9) необходимо учитывать всегда.
4. Исследование уравнений (3.6)–(3.9) в случае $\psi = 2\varphi $. В динамике твердого тела известны решения, описывающие прецессии при условии
Из (4.1) следует, что $\dot {\psi } = 2\dot {\varphi }$, то есть скорость прецессии в два раза больше скорости собственного вращения. Введем обозначения
(4.2)
$\begin{gathered} b_{1}^{{}} = a_{0}^{'}(a_{{\text{0}}}^{{}}r_{1}^{{}} + p_{2}^{{}}),\quad b_{2}^{{}} = a_{0}^{'}(a_{{\text{0}}}^{{}}r_{2}^{{}} - p_{1}^{{}}),\quad c_{1}^{{}} = a_{0}^{'}(r_{2}^{{}} - a_{{\text{0}}}^{{}}p_{1}^{{}}) \\ c_{2}^{{}} = - a_{0}^{'}(a_{{\text{0}}}^{{}}p_{2}^{{}} + r_{1}^{{}}),\quad b_{0}^{'} = - (a_{0}^{'})_{{}}^{2}r_{3}^{{}},\quad c_{0}^{{}} = (a_{0}^{'})_{{}}^{2}p_{3}^{{}} \\ \end{gathered} $В силу (4.2) функции $f_{i}^{{}}(\varphi )$ $(i = \overline {1,\,3} )$ преобразуем к виду
(4.3)
$\begin{gathered} f_{1}^{{}}(\varphi ) = b_{1}^{{}}\sin \varphi + b_{2}^{{}}\cos \varphi + b_{0}^{'},\quad f_{1}^{{}}(\varphi ) = c_{1}^{{}}\sin \varphi + c_{2}^{{}}\cos \varphi + c_{0}^{{}} \\ f_{3}^{{}}(\varphi ) = - b_{2}^{{}}\sin \varphi + b_{1}^{{}}\cos \varphi ,\quad f_{4}^{{}}(\varphi ) = - c_{2}^{{}}\sin \varphi + c_{1}^{{}}\cos \varphi \\ \end{gathered} $На основании (4.1)–(4.3) найдем функции
(4.4)
$\begin{gathered} \Phi _{1}^{{}}(\varphi ) = f_{1}^{{}}(\varphi )\cos \left( {2\varphi + {{\psi }_{0}}} \right) - f_{2}^{{}}(\varphi )\sin \left( {2\varphi + {{\psi }_{0}}} \right) = H_{3}^{{}}\sin 3\varphi + \\ + \;G_{3}^{{}}\cos 3\varphi + H_{2}^{{}}\sin 2\varphi + G_{2}^{{}}\cos 2\varphi + H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi \\ \end{gathered} $(4.5)
$\begin{gathered} \Phi _{2}^{{}}(\varphi ) = f_{1}^{{}}(\varphi )\sin \left( {2\varphi + {{\psi }_{0}}} \right) + f_{2}^{{}}(\varphi )\cos \left( {2\varphi + {{\psi }_{0}}} \right) = G_{3}^{{}}\sin 3\varphi - \\ - \;H_{3}^{{}}\cos 3\varphi + G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi + G_{1}^{{}}\sin \varphi - H_{1}^{{}}\cos \varphi \\ \end{gathered} $(4.6)
$\begin{gathered} \Phi _{3}^{{}}(\varphi ) = f_{3}^{{}}(\varphi )\sin \left( {2\varphi + {{\psi }_{0}}} \right) + f_{4}^{{}}(\varphi )\cos \left( {2\varphi + {{\psi }_{0}}} \right) = \\ = H_{3}^{{}}\sin 3\varphi + G_{3}^{{}}\cos 3\varphi - H_{1}^{{}}\sin \varphi - G_{1}^{{}}\cos \varphi , \\ \end{gathered} $(4.7)
$\begin{gathered} H_{3}^{{}} = r_{{12}}^{{}}\cos \psi _{0}^{{}} - r_{{21}}^{{}}\sin \psi _{0}^{{}},\quad G_{3}^{{}} = r_{{21}}^{{}}\cos \psi _{0}^{{}} + r_{{12}}^{{}}\sin \psi _{0}^{{}} \\ H_{2}^{{}} = a_{0}^{{'2}}(r_{3}^{{}}\sin \psi _{0}^{{}} - p_{3}^{{}}\cos \psi _{0}^{{}}),\quad G_{2}^{{}} = - a_{0}^{{'2}}(r_{3}^{{}}\cos \psi _{0}^{{}} + p_{3}^{{}}\sin \psi _{0}^{{}}) \\ H_{1}^{{}} = p_{{12}}^{{}}\sin \psi _{0}^{{}} - p_{{21}}^{{}}\cos \psi _{0}^{{}},\quad G_{1}^{{}} = - p_{{21}}^{{}}\sin \psi _{0}^{{}} - p_{{12}}^{{}}\cos \psi _{0}^{{}} \\ \end{gathered} $Здесь
(4.8)
$\begin{gathered} r_{{12}}^{{}} = \frac{{a_{0}^{'}(a_{0}^{{}} + 1)}}{2}(r_{1}^{{}} + p_{2}^{{}}),\quad r_{{21}}^{{}} = \frac{{a_{0}^{'}(a_{0}^{{}} + 1)}}{2}(r_{2}^{{}} - p_{1}^{{}}) \\ p_{{12}}^{{}} = \frac{{a_{0}^{'}(1 - a_{0}^{{}})}}{2}(r_{2}^{{}} + p_{1}^{{}}),\quad p_{{21}}^{{}} = \frac{{a_{0}^{'}(1 - a_{0}^{{}})}}{2}(p_{2}^{{}} - r_{1}^{{}}) \\ \end{gathered} $Рассмотрим уравнения (3.6)–(3.9) при условиях (4.1) и $A = {\text{(}}A_{{ij}}^{{}}{\text{)}}$. Тогда на первом этапе распишем уравнение (3.6). Положим
(4.9)
$\begin{gathered} F_{1}^{{}}(\varphi ) = (A{\mathbf{a}} \cdot {\mathbf{a}}) + 4(A{\mathbf{a}} \cdot {\mathbf{\gamma }}) + 4(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) = \\ = Q_{2}^{{}}\sin 2\varphi + L_{2}^{{}}\cos 2\varphi + Q_{1}^{{}}\sin \varphi + L_{1}^{{}}\cos \varphi + L_{0}^{{}}, \\ \end{gathered} $(4.10)
$\begin{gathered} Q_{2}^{{}} = 4a_{0}^{{'2}}A_{{12}}^{{}},\quad L_{2}^{{}} = 2a_{0}^{{'2}}(A_{{22}}^{{}} - A_{{11}}^{{}}),\quad Q_{1}^{{}} = 4a_{0}^{'}(1 + 2a_{0}^{{}})A_{{13}}^{{}} \\ L_{1}^{{}} = 4a_{0}^{'}(1 + 2a_{0}^{{}})A_{{23}}^{{}},\quad L_{0}^{{}} = A_{{33}}^{{}}(1 + 2a_{0}^{{}})_{{}}^{2} + 2a_{0}^{{'2}}(A_{{11}}^{{}} + A_{{22}}^{{}}) \\ \end{gathered} $Уравнение (3.6), в силу условия (4.1) и обозначений (4.7), (4.9), таково:
(4.11)
$\begin{gathered} \dot {\varphi }_{{}}^{2}\left( {Q_{2}^{{}}\sin 2\varphi + L_{2}^{{}}\cos 2\varphi + Q_{1}^{{}}\sin \varphi + L_{1}^{{}}\cos \varphi + L_{0}^{{}}} \right) = \\ = 2\left[ {b_{0}^{{}}\left( {G_{3}^{{}}\sin 3\varphi - H_{3}^{{}}\cos 3\varphi + G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi } \right) + S_{1}^{{}}\sin \varphi + S_{2}^{{}}\cos \varphi + S_{0}^{{}}} \right], \\ \end{gathered} $(4.12)
$S_{1}^{{}} = a_{0}^{'}s_{1}^{{}} + \frac{{G_{1}^{{}}}}{{a_{0}^{'}}},\quad S_{2}^{{}} = a_{0}^{'}s_{2}^{{}} - \frac{{H_{1}^{{}}}}{{a_{0}^{'}}},\quad S_{0}^{{}} = a_{0}^{{}}s_{3}^{{}} + E$На основании (4.1), (4.4), (4.10) уравнение (3.8) представим в развернутом виде. Для этой цели введем обозначения
(4.13)
$\begin{gathered} F_{2}^{{}}(\varphi ) = (A{\mathbf{a}} \cdot {\mathbf{\gamma }}) + 2(A{\mathbf{\gamma }} \cdot {\mathbf{\gamma }}) = \frac{1}{2}Q_{2}^{{}}\sin 2\varphi + \frac{1}{2}L_{2}^{{}}\cos 2\varphi + \\ + \;\tilde {Q}_{1}^{{}}\sin \varphi + \tilde {L}_{1}^{{}}\cos \varphi + Q_{0}^{{}} \\ F_{3}^{{}}(\varphi ) = 4[{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{\gamma }})] + [{\mathbf{a}} \cdot ({\mathbf{\gamma }} \times A{\mathbf{a}})] = \\ = L_{2}^{{}}\sin 2\varphi - Q_{2}^{{}}\cos 2\varphi + \tilde {L}_{1}^{{}}\sin \varphi - \tilde {Q}_{1}^{{}}\cos \varphi , \\ \end{gathered} $(4.14)
$\begin{gathered} \tilde {Q}_{1}^{{}} = a_{0}^{'}(1 + 4a_{0}^{{}})A_{{13}}^{{}}{\text{,}}\quad \tilde {L}_{1}^{{}} = a_{0}^{'}(1 + 4a_{0}^{{}})A_{{23}}^{{}} \\ Q_{0}^{{}} = a_{0}^{{}}(1 + 2a_{0}^{{}})A_{{33}}^{{}} + a_{0}^{{'2}}(A_{{11}}^{{}} + A_{{22}}^{{}}) \\ \end{gathered} $В силу соотношений (4.4), (4.13) и учете (4.1), из уравнения (3.8) получим
(4.15)
$\begin{gathered} \ddot {\varphi }\left( {Q_{2}^{{}}\sin 2\varphi + L_{2}^{{}}\cos 2\varphi + 2\tilde {Q}_{1}^{{}}\sin \varphi + 2\tilde {L}_{1}^{{}}\cos \varphi + 2Q_{0}^{{}}} \right) = \\ = 2\left[ {\dot {\varphi }_{{}}^{2}\left( {L_{2}^{{}}\sin 2\varphi - Q_{2}^{{}}\cos 2\varphi + \tilde {L}_{1}^{{}}\sin \varphi - \tilde {Q}_{1}^{{}}\cos \varphi } \right) + } \right. \\ + \;b_{0}^{{}}\left. {\left( {H_{3}^{{}}\sin 3\varphi + G_{3}^{{}}\cos 3\varphi + H_{2}^{{}}\sin 2\varphi + G_{2}^{{}}\cos 2\varphi + H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi } \right)} \right] \\ \end{gathered} $Уравнения (4.11), (4.15) записаны в полном представлении, что связано с необходимостью использовать их в дальнейших преобразованиях. Но для исследования конкретных условий на параметры задачи, при которых уравнения совместны, целесообразно представить их в компактном виде. Обозначим правую часть уравнения (4.11) через $2{{R}_{1}}$, где
(4.16)
$\begin{gathered} R_{1}^{{}}(\varphi ) = b_{0}^{{}}\left( {G_{3}^{{}}\sin 3\varphi - H_{3}^{{}}\cos 3\varphi + G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi } \right) + \\ + \;\left( {S_{1}^{{}}\sin \varphi + S_{2}^{{}}\cos \varphi + S_{0}^{{}}} \right) \\ \end{gathered} $Тогда, на основании (4.11), (4.16) имеем
Аналогично запишем (4.15), учтя формулы (4.4), (4.15):
(4.18)
$\ddot {\varphi }F_{2}^{{}}(\varphi ) = \dot {\varphi }F_{3}^{{}}(\varphi ) + b_{0}^{{}}\Phi _{1}^{{}}(\varphi )$Продифференцируем обе части уравнения (4.17) по $t$ и внесем в него $\ddot {\varphi }$ из (4.18). В результате получим уравнение, содержащее $\dot {\varphi }_{{}}^{2}$. Поэтому в нем необходимо избавиться от $\dot {\varphi }_{{}}^{2}$ с помощью уравнения (4.17). Тогда найдем алгебраическое уравнение
(4.19)
${{R}_{1}}(\varphi )[2{{F}_{1}}(\varphi ){{F}_{3}}(\varphi ) + {{F}_{2}}(\varphi )F_{1}^{'}(\varphi )] + {{F}_{1}}(\varphi )[{{b}_{0}}{{F}_{1}}(\varphi ){{\Phi }_{1}}(\varphi ) - R_{1}^{'}(\varphi ){{F}_{2}}(\varphi )] = 0$Если учесть в (4.19) функции (4.6), (4.9), (4.13), то имеем тригонометрический многочлен пятого порядка
(4.20)
$\begin{gathered} M_{5}^{{}}\sin 5\varphi + N_{5}^{{}}\cos 5\varphi + M_{4}^{{}}\sin 4\varphi + N_{4}^{{}}\cos 4\varphi + M_{3}^{{}}\sin 3\varphi + N_{3}^{{}}\cos 3\varphi + \\ + \;M_{2}^{{}}\sin 2\varphi + N_{2}^{{}}\cos 2\varphi + M_{1}^{{}}\sin \varphi + N_{1}^{{}}\cos \varphi + M_{0}^{{}}, \\ \end{gathered} $(4.21)
$Q_{2}^{{}}G_{3}^{{}} + L_{2}^{{}}H_{3}^{{}} = 0,\quad Q_{2}^{{}}H_{3}^{{}} - L_{2}^{{}}G_{3}^{{}} = 0$Изучим вариант $G_{3}^{2} + H_{3}^{2} \ne 0$. Тогда из (4.21) получим
Используя в равенствах (4.22) обозначения (4.10), находим условия на тензор инерции $A$:
Запишем функции $F_{1}^{{}}(\varphi )$, $F_{2}^{{}}(\varphi )$, $F_{3}^{{}}(\varphi )$, $R_{1}^{{}}(\varphi )$, $R_{1}^{'}(\varphi )$, сохраняя члены, имеющие максимальные аргументы тригонометрических функций
(4.24)
$\begin{gathered} F_{3}^{{}}(\varphi ) = Q_{1}^{{}}\sin \varphi - L_{1}^{{}}\cos \varphi ,\quad F_{2}^{{}}(\varphi ) = \tilde {Q}_{1}^{{}}\sin \varphi + \tilde {L}_{1}^{{}}\cos \varphi + \ldots \\ F_{1}^{{}}(\varphi ) = \tilde {L}_{1}^{{}}\sin \varphi + \tilde {Q}_{1}^{{}}\cos \varphi + \ldots ,\quad R_{1}^{{}}(\varphi ) = b_{0}^{{}}\left( {G_{3}^{{}}\sin 3\varphi - H_{3}^{{}}\cos 3\varphi + \ldots } \right) \\ R_{1}^{'}(\varphi ) = 3b_{0}^{{}}\left( {G_{3}^{{}}\cos 3\varphi + H_{3}^{{}}\sin 3\varphi + \ldots } \right){\text{,}}\quad \Phi _{1}^{{}}(\varphi ) = H_{3}^{{}}\sin 3\varphi + G_{3}^{{}}\cos 3\varphi + \ldots \\ \end{gathered} $Обратимся к уравнению (4.19). Для его представления в наглядном виде вычислим $2F_{1}^{{}}(\varphi )F_{3}^{{}}(\varphi )$ + $F_{2}^{{}}(\varphi )F_{1}^{'}(\varphi )$. Используя (4.24), а также (4.10), (4.14), имеем
(4.25)
$\begin{gathered} 2F_{1}^{{}}(\varphi )F_{3}^{{}}(\varphi ) + F_{2}^{{}}(\varphi )F_{1}^{'}(\varphi ) = \\ = 2a_{0}^{{'2}}\left( {1 + 2{{a}_{0}}} \right)\left( {1 + 4{{a}_{0}}} \right)\left[ {\left( {A_{{23}}^{2} - A_{{13}}^{2}} \right)\sin 2\varphi - 2A_{{13}}^{{}}A_{{23}}^{{}}\cos 2\varphi } \right] + \ldots \\ \end{gathered} $Преобразуем выражение в квадратных скобках во втором слагаемом уравнения (4.19). На основании принятых ранее обозначений имеем
(4.26)
$\begin{gathered} b_{0}^{{}}F_{1}^{{}}(\varphi )\Phi _{1}^{{}}(\varphi ) - R_{1}^{'}(\varphi )F_{2}^{{}}(\varphi ) = \\ = \left( {1 - 4{{a}_{0}}} \right)\left( {A_{{13}}^{2}\sin \varphi + A_{{23}}^{{}}\cos \varphi } \right)\left( {{{G}_{3}}\cos 3\varphi + {{H}_{3}}\sin 3\varphi } \right) + \ldots \\ \end{gathered} $Запишем уравнение (4.19), в силу (4.16), (4.24)–(4.26)
(4.27)
$\begin{gathered} (1 + 2a_{0}^{{}})(1 + 4a_{0}^{{}})(G_{3}^{{}}\sin 3\varphi - H_{3}^{{}}\cos 3\varphi + ...) \times \\ \times \;[(A_{{23}}^{2} - A_{{13}}^{2})\sin 2\varphi - 2A_{{13}}^{{}}A_{{23}}^{{}}\cos 2\varphi + ...] + \\ + \;(1 + 2a_{0}^{{}})(1 - 4a_{0}^{{}})(G_{3}^{{}}\cos 3\varphi - H_{3}^{{}}\sin 3\varphi + \ldots ) \times \\ \times \;[(A_{{23}}^{2} - A_{{13}}^{2})\cos 2\varphi + 2A_{{13}}^{{}}A_{{23}}^{{}}\sin 2\varphi + \ldots ] = 0 \\ \end{gathered} $Рассмотрим случай $1 + 2a_{0}^{{}} = 0$. Тогда из (4.27) следует, что коэффициенты при $\sin 5\varphi $, $\cos 5\varphi $ равны нулю. Для дальнейшего изучения уравнения (4.19) положим в (4.9), (4.13), (4.14) $a_{0}^{{}} = - \frac{1}{2}$:
(4.28)
$\begin{gathered} F_{1}^{{}}(\varphi ) = 4a_{0}^{{'2}}A_{{11}}^{{}},\quad F_{1}^{'}(\varphi ) = 0 \\ F_{2}^{{}}(\varphi ) = 2a_{0}^{'}\left[ {a_{0}^{{}}\left( {A_{{13}}^{{}}\sin \varphi + A_{{23}}^{{}}\cos \varphi } \right) + a_{0}^{'}A_{{11}}^{{}}} \right] \\ F_{3}^{{}}(\varphi ) = 2a_{0}^{'}a_{0}^{{}}\left( {A_{{23}}^{{}}\sin \varphi - A_{{13}}^{{}}\cos \varphi } \right) \\ \end{gathered} $Функции $R_{1}^{{}}(\varphi )$, $R_{1}^{'}(\varphi )$, $\Phi _{1}^{{}}(\varphi )$, в силу предположения $H_{3}^{{}} \ne 0$, $G_{3}^{{}} \ne 0$ имеют прежний вид. На основании (4.28) формул для $\,R_{1}^{{}}(\varphi )$ и $R_{1}^{'}(\varphi )$ из (4.24) можно сделать заключение о том, что коэффициенты при $\sin 4\varphi $, cos4φ в уравнении (4.19) обращаются в нуль при условии $a_{0}^{{}} = 0$, что невозможно, так как $a_{0}^{{}} = - \frac{1}{2}$, или при выполнении равенств $A_{{23}}^{{}} = 0$, $A_{{13}}^{{}} = 0$. Рассмотрение уравнения (4.19) в последнем случае приведет к заключению о том, что оно может быть тождеством по $\varphi $ только при $H_{3}^{{}} = 0$, $G_{3}^{{}} = 0$.
Распишем уравнение (4.27) при $1 + 2a_{0}^{{}} \ne 0$, приняв во внимание только коэффициенты при $\sin 5\varphi $, cos 5φ:
где(4.30)
$K_{1}^{{}} = 2H_{3}^{{}}A_{{13}}^{{}}A_{{23}}^{{}} - G_{3}^{{}}\left( {A_{{23}}^{2} - A_{{13}}^{2}} \right),\quad K_{2}^{{}} = H_{3}^{{}}\left( {A_{{23}}^{2} - A_{{13}}^{2}} \right) + 2G_{3}^{{}}A_{{13}}^{{}}A_{{23}}^{{}}$Если в (4.29) полагать $a_{0}^{{}} \ne 0$, то в силу предположения $H_{3}^{{}} \ne 0$, $G_{3}^{{}} \ne 0$, из (4.25), (4.30) получим
Пусть в (4.29) $a_{0}^{{}} = 0$. Тогда, на основании (4.10), (4.13), (4.24), из уравнения (4.19) установим его вид, указанный в (4.20):
(4.32)
$\left( {A_{{13}}^{{}}H_{3}^{{}} - A_{{23}}^{{}}G_{3}^{{}}} \right)\cos 4\varphi - \left( {A_{{23}}^{{}}H_{3}^{{}} + A_{{13}}^{{}}G_{3}^{{}}} \right){\text{sin4}}\varphi + \ldots $Из (4.32) следуют равенства $A_{{13}}^{{}} = 0$, $A_{{23}}^{{}} = 0$. Тогда ${{F}_{1}} = {{L}_{0}}$, ${{F}_{2}} = {{Q}_{0}}$, ${{F}_{3}} = 0$. Уравнение (4.19) упрощается:
(4.33)
$L_{0}^{{}}\left( {H_{3}^{{}}\sin 3\varphi + G_{3}^{{}}\cos 3\varphi + \ldots } \right) - 3Q_{0}^{{}}\left( {G_{3}^{{}}\cos 3\varphi + H_{3}^{{}}\sin 3\varphi + \ldots } \right) = 0,$(4.34)
$L_{0}^{{}} = \left( {1 + 2{{a}_{0}}} \right)_{{}}^{2}A_{{33}}^{{}} + 4a_{0}^{{'2}}A_{{11}}^{{}},\quad Q_{0}^{{}} = a_{0}^{{}}\left( {1 + 2{{a}_{0}}} \right)A_{{33}}^{{}} + 2a_{0}^{{'2}}A_{{11}}^{{}}$Приравнивая к нулю коэффициенты при $\sin 3\varphi $, $\cos 3\varphi $ в уравнении (4.33), в силу (4.34) получим уравнение
Других условий из (4.33) не следует. Поэтому обратимся к уравнению (3.9), полагая в нем $A_{{12}}^{{}} = 0$, $A_{{22}}^{{}} = A_{{11}}^{{}}$, $A_{{13}}^{{}} = 0$, $A_{{23}}^{{}} = 0$. Очевидно, что коэффициент при производной $\ddot {\varphi }$ равен нулю. Для того, чтобы расписать (3.9), запишем основные формулы. В силу (3.5), (4.5), (4.24), имеем
(4.36)
$\begin{gathered} \Phi _{4}^{{}}(\varphi ) = f_{6}^{{}}(\varphi )\sin \left( {2\varphi + {{\psi }_{0}}} \right) + f_{7}^{{}}(\varphi )\cos \left( {2\varphi + {{\psi }_{0}}} \right) = \\ = \frac{{a_{0}^{{'2}}}}{2}\left( {{{D}_{1}}\sin 3\varphi + {{D}_{2}}\cos 3\varphi } \right) + \ldots \\ R_{1}^{{}} = - \frac{1}{2}\left( {1 + {{a}_{0}}} \right)\left( {{{D}_{1}}\sin 3\varphi + {{D}_{2}}\cos 3\varphi } \right) + \ldots , \\ \end{gathered} $(4.37)
$\begin{gathered} D_{1}^{{}} = \left( {p_{1}^{{}} - r_{2}^{{}}} \right)\cos \psi _{0}^{{}} - \left( {p_{2}^{{}} + r_{1}^{{}}} \right)\sin \psi _{0}^{{}} \\ D_{2}^{{}} = \left( {p_{1}^{{}} - r_{2}^{{}}} \right)\sin \psi _{0}^{{}} + \left( {p_{2}^{{}} + r_{1}^{{}}} \right)\cos \psi _{0}^{{}} \\ \end{gathered} $Тогда, в силу (4.36), (4.37) и принятых ранее условий из (3.9), для слагаемых, содержащих $\sin 3\varphi $ и $\cos 3\varphi $, имеем
Из данного соотношения следует условие на параметры
(4.38)
$4A_{{11}}^{{}}\left( {a_{0}^{{}} + 1} \right)\left( {3a_{0}^{{}} - 1} \right) - A_{{33}}^{{}}\left( {1 + 2a_{0}^{{}}} \right)\left( {5 + 6a_{0}^{{}}} \right) = 0$Очевидно, что уравнения (4.35), (4.38) относительно параметра $a_{0}^{{}}$ не совместны. Итак, в равенствах (4.29), (4.30) необходимо принять $H_{3}^{{}} = 0$, $G_{3}^{{}} = 0$. Тогда в равенствах (4.21) необходимо принять
5. Случай $H_{3}^{{}} = 0$, $G_{3}^{{}} = 0$. В дальнейшем, на основании результатов разд. 4 и формул (4.39), полагаем, что $Q_{2}^{2} + L_{2}^{2} \ne 0$. Из обозначений для $H_{3}^{{}}$, $G_{3}^{{}}$ из системы (4.7), в силу (4.8), получим
При условиях (5.1) значения $\Phi _{i}^{{}}(\varphi )$ $(i = \overline {1,\,4} )$ таковы:
(5.2)
$\begin{gathered} \Phi _{1}^{{}}(\varphi ) = H_{2}^{{}}\sin 2\varphi + G_{2}^{{}}\cos 2\varphi + H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi \\ \Phi _{2}^{{}}(\varphi ) = G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi + G_{1}^{{}}\sin \varphi - H_{1}^{{}}\cos \varphi \\ \Phi _{3}^{{}}(\varphi ) = - \left( {H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi } \right) \\ \Phi _{4}^{{}}(\varphi ) = b_{0}^{{}}a_{0}^{{}}\left( {G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi } \right) + \tilde {H}_{1}^{{}}\sin \varphi + \tilde {G}_{1}^{{}}\cos \varphi , \\ \end{gathered} $(5.3)
$\begin{gathered} H_{2}^{{}} = a_{0}^{{'2}}\left( {r_{3}^{{}}\sin \psi _{0}^{{}} - p_{3}^{{}}\cos \psi _{0}^{{}}} \right),\quad G_{2}^{{}} = - a_{0}^{{'2}}\left( {r_{3}^{{}}\cos \psi _{0}^{{}} + p_{3}^{{}}\sin \psi _{0}^{{}}} \right) \\ H_{1}^{{}} = a_{0}^{'}\left( {1 - a_{0}^{{}}} \right)\left( {r_{2}^{{}}\sin \psi _{0}^{{}} - r_{1}^{{}}\cos \psi _{0}^{{}}} \right),\quad G_{1}^{{}} = - a_{0}^{'}\left( {1 - a_{0}^{{}}} \right)\left( {r_{1}^{{}}\sin \psi _{0}^{{}} + r_{2}^{{}}\cos \psi _{0}^{{}}} \right) \\ \tilde {H}_{1}^{{}} = a_{0}^{{'2}}\left( {r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}}} \right),\quad \tilde {G}_{2}^{{}} = - a_{0}^{{'2}}\left( {r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}}} \right) \\ \end{gathered} $Если в (5.3) параметры $H_{2}^{{}} = 0$, $G_{2}^{{}} = 0$, то должны выполняться условия $p_{3}^{{}} = 0$, $r_{3}^{{}} = 0$. Тогда на основании равенств (5.1) векторы ${\mathbf{p}} = (r_{2}^{{}}, - r_{1}^{{}},0)$, ${\mathbf{r}} = (r_{1}^{{}},r_{2}^{{}},0)$ ортогональны. Когда выполнены равенства $H_{1}^{{}} = 0$, $G_{1}^{{}} = 0$, то из (5.3) следует, что векторы ${\mathbf{p}}$ и ${\mathbf{r}}$ направлены по оси, содержащей вектор ${\mathbf{a}}$.
Рассмотрим уравнения (4.11), (4.15), полагая в них $A_{{11}}^{{}} \ne A_{{22}}^{{}}$, $A_{{12}}^{{}} \ne 0$, то есть $Q_{2}^{{}} \ne 0$, $L_{2}^{{}} \ne 0$. В силу условий (4.38), функция $R_{1}^{{}}(\varphi )$ из (4.16) упрощается, а функции $F_{i}^{{}}(\varphi )$ $(i = \overline {1,\,3} )$ сохраняют прежний вид. Запишем их так:
(5.4)
$\begin{gathered} F_{1}^{{}}(\varphi ) = Q_{2}^{{}}\sin 2\varphi + L_{2}^{{}}\cos 2\varphi + ...,\quad F_{2}^{{}}(\varphi ) = \frac{1}{2}\left( {Q_{2}^{{}}\sin 2\varphi + L_{2}^{{}}\cos 2\varphi } \right) + ... \\ F_{3}^{{}}(\varphi ) = L_{2}^{{}}\sin 2\varphi - Q_{2}^{{}}\cos 2\varphi + ... \\ \end{gathered} $Как показывают вычисления, в данном случае целесообразно рассматривать не уравнение (3.8), а уравнение (3.7) (совместно с уравнением (3.6)).
На основании соотношения (4.6) при условии $\dot {\psi } = 2\dot {\varphi }$ уравнение (3.7) представим в виде
(5.5)
$F_{4}^{{}}(\varphi )\ddot {\varphi } = F_{5}^{{}}(\varphi )\dot {\varphi }_{{}}^{2} - S_{1}^{{}}\cos \varphi + S_{2}^{{}}\sin \varphi ,$(5.6)
$\begin{gathered} F_{4}^{{}}(\varphi ) = 2a_{0}^{'}\left( {A_{{13}}^{{}}\sin \varphi + A_{{23}}^{{}}\cos 2\varphi } \right) + \left( {1 + 2a_{0}^{{}}} \right)A_{{33}}^{{}} \\ F_{5}^{{}}(\varphi ) = N_{2}^{{}}\sin 2\varphi + K_{2}^{{}}\cos 2\varphi + N_{1}^{{}}\cos \varphi + K_{1}^{{}}\sin \varphi , \\ \end{gathered} $Запишем уравнение (4.11), полагая в нем $H_{3}^{{}} = 0$, $G_{3}^{{}} = 0$
где(5.8)
$R_{1}^{{}}(\varphi ) = b_{0}^{{}}\left( {G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi } \right) + S_{1}^{{}}\sin \varphi + S_{2}^{{}}\cos \varphi + S_{0}^{{}}$Если $F_{4}^{{}}(\varphi ) \ne 0$, то из (5.5), (5.7) следует
(5.9)
$\begin{gathered} R_{1}^{{}}(\varphi )\left[ {2F_{1}^{{}}(\varphi )F_{5}^{{}}(\varphi ) + F_{4}^{{}}(\varphi )F_{1}^{'}(\varphi )} \right] - \\ - \;F_{1}^{{}}(\varphi )\left[ {F_{1}^{{}}(\varphi )\left( {S_{1}^{{}}\cos \varphi - S_{2}^{{}}\sin \varphi } \right) + R_{1}^{'}(\varphi )F_{4}^{{}}(\varphi )} \right] = 0 \\ \end{gathered} $В особом случае $F_{4}^{{}}(\varphi ) \equiv 0$ из (5.5), (5.7) следует
(5.10)
$2R_{1}^{{}}(\varphi )F_{5}^{{}}(\varphi ) - F_{1}^{{}}(\varphi )\left( {S_{1}^{{}}\cos \varphi - S_{2}^{{}}\sin \varphi } \right) = 0$Из уравнения (5.10) в силу $A_{{12}}^{{}} \ne 0$, $A_{{22}}^{{}} \ne A_{{11}}^{{}}$ получим $H_{2}^{{}} = 0$, $G_{2}^{{}} = 0$. Таким образом, $F_{4}^{{}}(\varphi ) \equiv 0$ и справедливо уравнение (5.9), в котором $R_{1}^{{}}(\varphi )$ при $H_{2}^{{}} = 0$, $G_{2}^{{}} = 0$ принимает вид
Подставляя в уравнение (5.9) $F_{1}^{{}}(\varphi )$ из (5.4), $F_{4}^{{}}(\varphi )$ и $F_{5}^{{}}(\varphi )$ из (5.6), $R_{1}^{{}}(\varphi )$ из (5.11), потребуем, чтобы полученное уравнение было тождеством по $\varphi $. Тогда, приравнивая к нулю коэффициенты при $\sin 5\varphi $ и $\cos 5\varphi $, найдем равенства
6. Случай $H_{3}^{{}} = 0$, $G_{3}^{{}} = 0$, $Q_{2}^{{}} = 0$, $L_{2}^{{}} = 0$. Запишем необходимые соотношения для дальнейших преобразований:
(6.1)
$\begin{gathered} F_{1}^{{}}(\varphi ) = 4a_{0}^{'}\left( {1 + 2a_{0}^{{}}} \right)\left( {A_{{13}}^{{}}\sin \varphi + A_{{23}}^{{}}\cos \varphi } \right) + L_{0}^{{}} \\ F_{4}^{{}}(\varphi ) = 2a_{0}^{'}\left( {A_{{13}}^{{}}\sin \varphi + A_{{23}}^{{}}\cos 2\varphi } \right) + \left( {1 + 2a_{0}^{{}}} \right)A_{{33}}^{{}} \\ F_{5}^{{}}(\varphi ) = 4a_{0}^{{}}a_{0}^{'}\left( {A_{{13}}^{{}}\cos \varphi - A_{{23}}^{{}}\sin \varphi } \right) \\ \end{gathered} $Функция $R_{1}^{{}}(\varphi )$ из (5.8) не изменяет своего значения. В силу (5.5) случай $F_{4}^{{}}(\varphi ) = 0$, $F_{5}^{{}}(\varphi ) = 0$ является особым. Для него в (6.1) необходимо положить $A_{{13}}^{{}} = 0$, $A_{{23}}^{{}} = 0$, $a_{0}^{{}} = - \frac{1}{2}$, а в (5.10) – $S_{1}^{{}} = 0$, $S_{2}^{{}} = 0$. Уравнения (5.7), (4.15) примут вид
(6.2)
$\begin{gathered} L_{0}^{{}}\dot {\varphi }_{{}}^{2} = 2\left[ {b_{0}^{{}}\left( {G_{2}^{{}}\sin 2\varphi - H_{2}^{{}}\cos 2\varphi } \right) + S_{0}^{{}}} \right] \\ Q_{0}^{{}}\ddot {\varphi } = b_{0}^{{}}\left( {H_{2}^{{}}\sin 2\varphi + G_{2}^{{}}\cos 2\varphi + H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi } \right) \\ \end{gathered} $Из уравнений (6.2) на основании значений $L_{0}^{{}} = 4a_{0}^{{'2}}A_{{11}}^{{}}$, $Q_{0}^{{}} = 2a_{0}^{{'2}}A_{{11}}^{{}}$ положим, что $H_{1}^{{}} = 0$, $G_{1}^{{}} = 0$. Тогда из (5.3) следует $r_{1}^{{}} = 0$, $r_{2}^{{}} = 0$. В исследуемом случае уравнение (3.7) вырождается и поэтому необходимо обращаться к уравнению (3.9). На основании принятых условий и обозначений (3.5) получим
Если это уравнение рассматривать совместно с первым уравнением из (6.2) при условии ${{a}_{0}} = - \frac{1}{2}$, то получим $H_{2}^{{}} = 0$, $G_{2}^{{}} = 0$. Следовательно, в силу первого уравнения из (6.2) установим для $\dot {\varphi }$ постоянное значение, что исключается в данной статье.
Рассмотрим уравнение (5.9) в случае (6.1) и потребуем, чтобы при подстановке (6.1) в (5.9) последнее будет тождеством по $\varphi $. Тогда, исключая случай ${{a}_{0}} = - \frac{1}{2}$, получим два независимых варианта условий на параметры:
Изучим вариант (6.3). Рассмотрим уравнение (5.9) при $A_{{13}}^{2} + A_{{23}}^{2} \ne 0$, тогда из (5.9) найдем $S_{1}^{{}} = 0$, $S_{2}^{{}} = 0$. Учитывая эти условия, а также равенства (6.3), из (5.8) установим $R_{1}^{{}}(\varphi ) = S_{0}^{{}}$, то есть $R_{1}^{'}(\varphi ) = 0$. Покажем, что параметр $S_{0}^{{}} = 0$. Обратимся к уравнению (5.9), полагая в нем R1(φ) = S0 ($R_{1}^{'}(\varphi ) = 0$). Тогда указанное свойство следует из (5.9), если
(6.5)
$F{\kern 1pt} *{\kern 1pt} (\varphi ) = 2F_{1}^{{}}(\varphi )F_{5}^{{}}(\varphi ) + F_{4}^{{}}(\varphi )F_{1}^{'}(\varphi ) \ne 0$Функцию $F{\kern 1pt} *{\kern 1pt} (\varphi )$ из (6.5) будем изучать при значениях (6.1). Поскольку $A_{{13}}^{2} + A_{{23}}^{2} \ne 0$, то $F{\kern 1pt} *{\kern 1pt} (\varphi ) = 0$ в случае, когда параметр $a_{0}^{{}} = - \frac{1}{4}$ и выполняется следующее условие на $a_{0}^{{}}$ и другие параметры $2L_{0}^{{}} = A_{{33}}^{{}}$:
(6.6)
$2\left[ {A_{{33}}^{{}}{{{\left( {1 + 2{{a}_{0}}} \right)}}^{2}} + 4a_{0}^{{'2}}A_{{33}}^{{}}} \right] - A_{{33}}^{{}} = 0$Подставляя ${{a}_{0}} = - \frac{1}{4}$ в уравнение (6.6), получим $A_{{33}}^{{}} = 15A_{{11}}^{{}}$. Так как в силу неравенств треугольника на главные моменты тела $A_{{33}}^{{}} < {\text{2}}A_{{11}}^{{}}$, то условие $A_{{33}}^{{}} = 15A_{{11}}^{{}}$ выполняться не может. Следовательно, $S_{0}^{{}} = 0$ и из (6.2) следует $\dot {\varphi }_{{}}^{2} = 0$, что невозможно. Это свойство означает, что, наряду с равенствами $H_{2}^{{}} = 0$, $L_{2}^{{}} = 0$, необходимо полагать $Q_{1}^{{}} = 0$, $L_{1}^{{}} = 0$. Так как $H_{2}^{{}} = 0$, $L_{2}^{{}} = 0$, то из (5.3) следуют равенства $r_{3}^{{}} = 0$, $p_{3}^{{}} = 0$.
7. Случай динамической симметрии тела. Результаты, полученные ранее, показывают, что исследуемое решение имеет место при следующих условиях:
(7.1)
$Q_{2}^{{}} = 0,\quad L_{2}^{{}} = 0,\quad Q_{1}^{{}} = 0,\quad L_{1}^{{}} = 0,\quad H_{3}^{{}} = 0,\quad G_{3}^{{}} = 0,\quad H_{2}^{{}} = 0,\quad G_{2}^{{}} = 0,$(7.2)
$A_{{12}}^{{}} = 0,\quad A_{{22}}^{{}} = A_{{11}}^{{}},\quad A_{{13}}^{{}} = 0,\quad A_{{23}}^{{}} = 0$(7.3)
$p_{1}^{{}} = r_{2}^{{}},\quad p_{2}^{{}} = - r_{1}^{{}},\quad p_{3}^{{}} = 0,\quad r_{3}^{{}} = 0$Запишем (4.17) с учетом условий (7.2), (7.3):
(7.4)
$\dot {\varphi }_{{}}^{2} = \frac{2}{{L_{0}^{{}}}}\left( {S_{1}^{{}}\sin \varphi + S_{2}^{{}}\cos \varphi + S_{0}^{{}}} \right),$(7.5)
$L_{0}^{{}} = \left( {1 + 2{{a}_{0}}} \right)_{{}}^{2}A_{{33}}^{{}} + 4a_{0}^{{'2}}A_{{11}}^{{}}$Обратимся к уравнению (4.19), в котором $F{\kern 1pt} *{\kern 1pt} (\varphi ) = 0$, $F_{3}^{{}}(\varphi ) = 0$:
(7.6)
$b_{0}^{{}}L_{0}^{{}}\left( {H_{1}^{{}}\sin \varphi + G_{1}^{{}}\cos \varphi } \right) - Q_{0}^{{}}\left( {S_{1}^{{}}\cos \varphi - S_{2}^{{}}\sin \varphi } \right) = 0,$(7.7)
$Q_{0}^{{}} = \left[ {a_{0}^{{}}\left( {1 + 2{{a}_{0}}} \right)A_{{33}}^{{}} + 2a_{0}^{{'2}}A_{{11}}^{{}}} \right]$Используя значения $H_{1}^{{}}{\text{,}}G_{1}^{{}}$, полученные из (4.7) в силу (7.3):
(7.8)
$H_{1}^{{}} = a_{0}^{'}\left( {1 - {{a}_{0}}} \right)\left( {r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}}} \right){\text{,}}\quad G_{1}^{{}} = a_{0}^{'}\left( {1 - {{a}_{0}}} \right)\left( {r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}}} \right){\text{,}}$(7.9)
$s_{1}^{{}} = \frac{{\left( {1 - a_{0}^{{}}} \right)R_{0}^{{}}\left( {r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}}} \right)}}{{a_{0}^{'}Q_{0}^{{}}}},\quad s_{2}^{{}} = - \frac{{\left( {1 - a_{0}^{{}}} \right)R_{0}^{{}}\left( {r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}}} \right)}}{{a_{0}^{'}Q_{0}^{{}}}},$(7.10)
$R_{0}^{{}} = L_{0}^{{}} - Q_{0}^{{}} = \left( {1 + a_{0}^{{}}} \right)\left[ {A_{{33}}^{{}}\left( {1 + 2a_{0}^{{}}} \right) + 2A_{{11}}^{{}}\left( {1 - a_{0}^{{}}} \right)} \right]$Рассмотрим уравнение (3.9) с учетом условий (7.2), (7.3). Потребуем, чтобы оно было тождеством по $\varphi $. Тогда, учитывая равенства (7.4), (7.5), (7.7)–(7.10), найдем функцию $E = E\left( {a_{0}^{{}},\psi _{0}^{{}},A_{{11}}^{{}},A_{{33}}^{{}}} \right)$ (явное значение не выписываем в силу сложности формулы) и равенства
(7.11)
$\left( {r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}}} \right)\tilde {F}\left( {a_{0}^{{}}} \right) = 0,\quad \left( {r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}}} \right)\tilde {F}\left( {a_{0}^{{}}} \right) = 0,$(7.12)
$\tilde {F}\left( {a_{0}^{{}}} \right) = \left( {1 - a_{0}^{{}}} \right)\left( {6a_{0}^{{}} + 1} \right)A_{{11}}^{{}} + \left( {2a_{0}^{{}} + 1} \right)\left( {3a_{0}^{{}} - 2} \right)A_{{33}}^{{}}$Так как условия $r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}} = 0$, $r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}} = 0$ при $r_{1}^{{}} \ne 0$, $r_{2}^{{}} \ne 0$ не выполняются, то в формулах (7.11), (7.12) $\tilde {F}(a_{0}^{{}}) = 0$, то есть, в силу (7.12), параметр $a_{0}^{{}}$ удовлетворяет уравнению
(7.13)
$\tilde {F}\left( {a_{0}^{{}}} \right) = 6a_{0}^{2}\left( {A_{{33}}^{{}} - A_{{11}}^{{}}} \right) + a_{0}^{{}}\left( {5A_{{11}}^{{}} - A_{{33}}^{{}}} \right) + \left( {A_{{11}}^{{}} - 2A_{{33}}^{{}}} \right) = 0$Представляет интерес случай $A_{{33}}^{{}} = A_{{11}}^{{}}$, для которого эллипсоид инерции тела является сферой. Тогда из (7.13) следует
то есть ${{\theta }_{0}} = {\text{arccos}}\frac{1}{4}$. В общем случае, в силу неравенств на главные моменты инерции, из уравнения (7.13) получимЕсли в (7.13) положить обобщенные условия Ковалевской $A_{{22}}^{{}} = A_{{11}}^{{}} = 2A_{{33}}^{{}}$, то из (7.13) следует, что $a_{0}^{{}} = 0$ (θ0 = 90°). При этом особенностей в выполненных преобразованиях не возникает. Можно в (7.13) принять и обобщенные условия Горячева–Чаплыгина: $A_{{22}}^{{}} = A_{{11}}^{{}} = 4A_{{33}}^{{}}$, тогда значение параметра таково: $a_{0}^{{}} \approx 0.94$.
Покажем, что в формуле (7.4) $S_{1}^{{}} \ne 0$, $S_{2}^{{}} \ne 0$. Внесем значения $s_{1}^{{}}$, $s_{2}^{{}}$ из (7.9) в формулы из (4.12):
(7.15)
$S_{1}^{{}} = \frac{{\left( {1 - {{a}_{0}}} \right)L_{0}^{{}}}}{{Q_{0}^{{}}}}\left( {r_{1}^{{}}\sin \psi _{0}^{{}} - r_{2}^{{}}\cos \psi _{0}^{{}}} \right),\quad S_{2}^{{}} = - \frac{{\left( {1 - {{a}_{0}}} \right)L_{0}^{{}}}}{{Q_{0}^{{}}}}\left( {r_{1}^{{}}\cos \psi _{0}^{{}} + r_{2}^{{}}\sin \psi _{0}^{{}}} \right)$В силу значения $L_{0}^{{}}$ из (7.5) получим $S_{1}^{{}} \ne 0$, $S_{2}^{{}} \ne 0$, а из формулы (7.4) следует, что $\varphi (t)$ – эллиптическая функция времени $\left( {\psi (t) = 2\varphi (t)} \right)$. Величина $S_{0}^{{}}$ определяется из последней формулы системы (4.12): $S_{0}^{{}} = a_{0}^{{}}s_{3}^{{}}$ + $E(a_{0}^{{}},\psi _{0}^{{}},A_{{11}}^{{}},A_{{33}}^{{}})$. Запишем (7.4) в интегральной форме:
(7.16)
$\int\limits_{\varphi _{0}^{{}}}^\varphi {\frac{{d\varphi }}{{\sqrt {S_{1}^{{}}\sin \varphi + S_{2}^{{}}\cos \varphi + S_{0}^{{}}} }}} = \sqrt {\frac{2}{{L_{0}^{{}}}}} \left( {t - {{t}_{0}}} \right)$Нахождение $\varphi (t)$ из (7.16) проводится стандартным образом.
Обсудим условия (7.2), (7.3). Равенства (7.2) означают, что прямая, содержащая вектор ${\mathbf{a}}$, является осью, относительно которой тело имеет динамически симметричное распределение. Но, в силу $s_{1}^{{}} \ne 0$, $s_{2}^{{}} \ne 0$, центр масс тела не лежит на этой оси. На основании равенств (7.3) приходим к выводу о том, что векторы ${\mathbf{r}} = (r_{1}^{{}},r_{2}^{{}},0)$, ${\mathbf{p}} = (r_{2}^{{}}, - r_{1}^{{}},0)$ ортогональны и расположены в плоскости, ортогональной вектору ${\mathbf{a}}$. Из полученных в разд. 7 результатов следует, что условий на параметры $r_{1}^{{}}$, $r_{2}^{{}}$, $\psi _{0}^{{}}$ нет.
Заключение. В статье рассмотрена задача об условиях существования прецессионных движений твердого тела под действием сил трех однородных силовых полей. Полагается, что скорость прецессии тела в два раза больше его скорости собственного вращения. Доказано, что необходимым условием таких движений является ортогональность векторов, задающих центры притяжения сил двух однородных силовых полей. Параметр в (7.13) $a_{0}^{{}} \in \left( { - \frac{1}{6},\frac{1}{2}} \right)$. Если тело имеет распределение масс, для которого эллипсоид инерции является сферой, то угол нутации равен ${\text{arccos}}\frac{{\text{1}}}{{\text{4}}}$. Угол собственного вращения находится путем обращения эллиптического интеграла (угол прецессии в два раза больше угла собственного вращения). Тело обладает свойством динамической симметрии относительно оси, образующей постоянный угол с одним из направлений действующих сил.
Представляет интерес привести примеры рациональных значений угла нутации в динамике твердого тела. В классической задаче о движении тела в решении Д. Гриоли [3] угол ${{\theta }_{0}}$ = 90°. В задаче о движении гиростата под действием потенциальных и гироскопических сил известно решение [18], в котором ${{\theta }_{0}}$ = 120°. Можно анонсировать и результат, который относится к анализу прецессионно-изоконических движений ($\dot {\psi } = \dot {\varphi }$) в рассматриваемой задаче. Он для сферического гиростата характеризуется значением ${{\theta }_{0}}$ = 60°.
Список литературы
Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. М.: Наука, 1976. 672 с.
Klein F., Sommerfeld A. Über die Theorie des Kreisels. New York: Johnson Reprint Corp., 1965. 966 p.
Grioli G. Esistenza e determinazione delle precessioni regolari dinamicamente possibili per un solido pesante asimmetrico // Ann. mat. pura et appl. 1947. S. 4. V. 26. fasc. 3–4. P. 271–281.
Горр Г.В. Прецессионные движения в динамике твердого тела и динамике систем связанных твердых тел // ПММ. 2003. Т. 67. Вып. 4. С. 573–587.
Bressan A. Sulle precessioni d’un corpo rigido costituenti moti di Hess // Rend. Semin. Mat. Univ. Padova. 1957. V. 27. P. 276–283.
Докшевич А.И. Решения в конечном виде уравнений Эйлера−Пуассона. Киев: Наук. думка, 1992. 168 с.
Горр Г.В., Мазнев А.В., Щетинина Е.К. Прецессионные движения в динамике твердого тела и в динамике систем связанных твердых тел. Донецк: ДонНУ, 2009. 222 с.
Горр Г.В., Мазнев А.В. Динамика гиростата, имеющего неподвижную точку. Донецк: ДонНУ, 2010. 364 с.
Горр Г.В., Мазнев А.В., Котов Г.А. Движение гиростата с переменным гиростатическим моментом. Донецк: Изд-е ГУ “Институт прикладной математики и механики”, 2017. 250 с.
Горр Г.В., Рубановский В.Н. Об одном новом классе движений системы тяжелых шарнирно связанных твердых тел // ПММ. 1988. Т. 50. Вып. 5. С. 707–712.
Ольшанский В.Ю. О регулярных прецессиях несимметричного твердого тела с жидким наполнением // ПММ. 2018. Т. 82. Вып. 5. С. 559–571.
Ol’shanskii V.Yu. New cases of regular precession of an asymmetric liquid-filled rigid body // Celest. Mech. Dyn. Astron. 2019. V. 131. Iss. 12. Art. no. 57.
Ol’shanskii V.Yu. Analysis of regular precession conditions for asymmetrical liquid-filled rigid body // Celest. Mech. Dyn. Astron. 2020. V. 132. Iss. 9. Art. no. 46.
Ольшанский В.Ю. Полурегулярная прецессия несимметричного твердого тела с жидким наполнением // ПММ. 2021. Т. 85. Вып. 5. С. 547–564.
Yehia H.M. On the regular precession of an asymmetric rigid body acted upon by uniform gravity and magnetic fields // Egypt. J. Bas. Appl. Sci. 2015. V. 2. Iss. 3. P. 200–205.
Yehia H.M. Regular precession of a rigid body (gyrostat) acted upon by an irreducible combination of three classical fields // J. Egypt. Math. Soc. 2017. V. 25. Iss. 2. P. 216–219.
Hessein A.M. Precessional motion of a rigid body acted upon by three irreducible fields // Rus. J. Nonlin. Dyn. 2019. V. 15. Iss. 3. P. 285–292.
Мазнев А.В. Прецессионно-изоконические движения в одном решении уравнений Кирхгофа // Вісн. Донецьк. ун-ту. Сер. А: Природничі науки. 2001. Вып. 2. С. 12–16.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика