Радиационные методы
УДК 620.179.15
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ В ЦИФРОВОЙ РАДИОГРАФИИ С
УЧЕТОМ ПРОСТРАНСТВЕННЫХ ФОРМ ОБЪЕКТОВ КОНТРОЛЯ
© 2020 г. С.П. Осипов1,*, И.Г. Ядренкин2, С.В. Чахлов1,**, О.С. Осипов3, Е.Ю. Усачев4
1Национальный исследовательский Томский политехнический университет,
Россия 634028 Томск, пр-т Ленина, 30
2Томский государственный архитектурно-строительный университет,
Россия 634003 Томск, пл. Соляная, 2
3Medialooks, Россия 236016 Калининград, ул. Александра Невского, 59
4МИРЭА — Российский технологический университет, Россия 119454 Москва, пр-т Вернадского, 78
E-mail: *osip1809@rambler.ru; **chakhlov@tpu.ru
Поступила в редакцию 12.06.2020; после доработки 22.06.2020
Принята к публикации 23.06.2020
Предложены алгоритмы моделирования пространственных форм объектов контроля и формирования изображений
в системах цифровой радиографии. Алгоритмы являются основой имитационных моделей анализируемых систем. Ими-
тационные модели предназначены для обоснования технической реализуемости задач контроля объектов и для выбора
параметров и оценки характеристик систем цифровой радиографии. Для иллюстрации возможностей разработанных
имитационных моделей были получены цифровые радиографические изображения некоторых объектов, включая этало-
ны чувствительности, пространственного разрешения, разрешающей способности, проникающей способности.
Ключевые слова: источники рентгеновского излучения, регистраторы рентгеновского излучения, проникающая
способность, цифровая радиография, контрастная чувствительность, радиационный контраст, пространственное раз-
решение.
DOI: 10.31857/S0130308220080047
ВВЕДЕНИЕ
Системы цифровой радиографии (СЦР) широко применяются в науке, медицине, в досмотро-
вом контроле, в различных отраслях промышленности, транспорта и строительства [1—6]. Воз-
растающие потребности в исследовании новых объектов, ранее считавшихся непригодными к кон-
тролю, и усиливающиеся требования потребителей к качеству контроля приводят к повышению
значимости вопросов, связанных с проектированием СЦР. Анализируемые системы состоят из ис-
точников и регистраторов рентгеновского излучения, устройств поступательного и (или) враща-
тельного перемещения (УП) объекта контроля (ОК) относительно неподвижной системы источник
— регистратор. В ряде комплексов система источник — регистратор перемещается относительно
ОК. Значимой частью СЦР являются алгоритмы и программы обработки информации.
Задача проектирования СЦР сводится к рациональному выбору параметров источника рентге-
новского излучения (ИРИ), регистратора рентгеновского излучения (РРИ) и схемы сканирования.
Отмеченный выбор определяется формой, размерами, структурой ОК и заданными потребителем
характеристиками СЦР. К основным характеристикам СЦР [7—11] относятся: производитель-
ность; проникающая способность; контрастная чувствительность; пространственное разрешение;
размер, материал и форма дефектов. Для определения вышеперечисленных характеристик в раз-
личных реализациях СЦР существуют специальные тестовые объекты [12—15] (ТО) — эталоны,
описанные в соответствующих стандартах.
Для подтверждения реализуемости задач проектирования СЦР, предназначенных для контроля
различных объектов, используются два основных подхода. Первый подход базируется на проведении
масштабных натурных экспериментов для конкретного образца контроля и характеризуется высоки-
ми материальными затратами. Второй подход связан с построением математических и компьютерных
моделей цифровой радиографии (ЦР) и проведением на их основе вычислительных экспериментов
по формированию цифровых радиографических изображений (ЦРИ) в ЦР. В настоящее время второй
подход становится все более значимым в вопросах рационального выбора составляющих СЦР (ИРИ,
РРИ, УП) [16—20]. К алгоритмам численной симуляции в СЦР необходимо выдвинуть несколько
требований: реалистичность ЦРИ ОК; высокая производительность формирования ЦРИ; возмож-
ность учета параметров ИРИ, РРИ, УП и ОК. В качестве базовой модели формирования ЦРИ могут
быть использованы модели из работ [8, 21, 22]. Сложность применения таких моделей обусловлена
трудностью описания распределения плотности и эффективного атомного номера (ЭАН) по объему
36
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
ОК. Прямое использование таких распределений при моделировании изображений усложняет вы-
числительные алгоритмы и делает их малопроизводительными. Отсюда следует необходимость в
совершенствовании методов моделирования ЦРИ на основе быстродействующих алгоритмов учета
пространственных форм ОК. За основу может быть использован подход из работы [22], в котором
ОК представляется в виде объединения и (или) замещения нескольких пространственных фигур.
Отмеченный подход к формированию ЦРИ логично назвать аддитивным методом моделирования.
Необходимо разработать упрощенный алгоритм формирования изображений в СЦР с учетом про-
странственных форм ОК и вспомогательных тестовых объектов (ТО).
1. АДДИТИВНЫЙ АЛГОРИТМ МОДЕЛИРОВАНИЯ РАДИОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ
1.1. Общее описание объекта контроля
Объект контроля занимает некоторую компактную часть трехмерного пространства V∈ℜ3 и
считается полностью определенным, если в каждой точке (x, y, z)∈V заданы плотность ρ и ЭАН Z.
Отсюда следует, что множество V представимо в виде объединения конечного числа непересекаю-
щихся структурных фрагментов Vn, n = 1… N:
N
V=V
;
V
≠∅;
V
V
=∅,
i
=1
N,
j
=1
N,i
≠
j
(1)
n
n
i
j
n=1
Пространственные распределения ρ и Z задаются выражениями:
ρ
,(x,y,z)
∈V
Z x,y,z)
∈V
n
n
n
n
ρ(x,y,z)
=
,
Z x,y,z)
=
(2)
0, (x,y,z)
∉
V
1, (x,y,z)
∉
V
n
n
Для использования приведенных характеристик ОК на практике необходимо описание гра-
ниц структурных фрагментов Bn трехмерными поверхностями. В первом приближении можно
рассмотреть модель мононаправленного источника излучения. Это допущение при необходимо-
сти может быть снято. Анализируемая задача связана с просвечиванием ОК рентгеновским или
гамма-излучением, поэтому логично связать направление одной из осей системы координат с
направлением распространения излучения, например z. При построении модели формирования
ЦРИ ограничимся выпуклыми односвязными телами. Напомним, что пространственная фигура
(тело) Vs является выпуклой и односвязной, если выполняется следующее условие:
A=
(x
1
,
y
1
, z
1
)∈V
s
, B=
(
x
2
,
y
2
, z
2
)
∈V
s
,∀C∈ AB⇒C∈V
s
(3)
С учетом сказанного выше, для любого значения n, n = 1 … N, границы Bn описываются парой
двумерных функций:
z = Fn1(x, y), z = Fn2(x, y).
(4)
Функции (4) являются удобными, так как позволяют оценить толщину n-го фрагмента ОК
по лучу Hn(x, y), соединяющему излучающую и детектирующую точки. С учетом (4) и условия
Fn2(x, y) > Fn1(x, y), формула для оценки Hn(x, y) имеет следующий вид:
Hn(x, y) = Fn2(x, y) - Fn1(x, y).
(5)
Отметим, что условие непересекаемости объемов из (1) и условие (3) могут находиться в ка-
жущемся противоречии друг с другом в случае замещения части одного пространственного объ-
ема другим. Но это противоречие применительно к модели формирования изображений в СЦР
является разрешимым. Ниже продемонстрируем это, введя основную формулу рассматриваемого
аддитивного алгоритма.
1.2. Основная формула аддитивного алгоритма формирования цифровых
радиографических изображений
Все реализации СЦР базируются на экспоненциальном законе ослабления гамма-излучения
с энергией E. Этот закон применительно к рассматриваемой задаче связывает ослабление гамма-
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
37
излучения с энергией E с параметрами однородного объекта по лучу, соединяющему источник
фотонов и точку детектирования с координатами (xd, yd):
I(E,x
d
,
y
d
)
=I
0
(E,x
d
,
y
d
)exp(−µ(E)H
d
)
=I
0
(E,x
d
,
y
d
)exp(−P(E,x
d
,
y
d
)),
(6)
здесь I, I0 — интенсивность излучения с ослабляющим объектом и без него; Hd — толщина ОК
по описанному выше лучу; μ(E) — линейный коэффициент ослабления (ЛКО); P(E, xd, yd) — тол-
щина ОК по лучу в длинах свободного пробега (д.с.п.). Отношение I к I0 называют радиационной
прозрачностью ОК для гамма-излучения.
Основная формула аддитивного алгоритма формирования ЦРИ базируется на оценке толщины
ОК в д.с.п. P(E, xd, yd), которая выводится из (6) с учетом (1), (2) и преобразования ЛКО μ в массо-
вый коэффициент ослабления (МКО) излучения m:
N
P(
E,x
,
y
)
=
c
(x
,
y
)
m(
E,Z
)ρ
H
(
x
,
y
),
(7)
d
d
∑
n d
d
n
n n d
d
n
=1
где cn — коэффициент, равный +1 для наложения объемов и -1 для замещения.
Для ускорения процесса вычислений при моделировании ЦРИ ОК большого объема значения
коэффициентов cn(xd, yd) вычисляются предварительно, а уровни их значений дополняются 0 для
исключения необходимости вычисления Hn(xd, yd) для ряда точек детектирования. Для некоторых
объектов испытаний взаимное положение фрагментов не исчерпывается наложением или замеще-
нием, существует более общий случай, в котором наблюдается частичное физическое замещение
объема одного фрагмента таким же объемом другого фрагмента. В случае частичного замещения
коэффициенты cn и выражение (7) будут иметь более сложный вид, что усложнит процесс симу-
ляции. Для устранения этого негативного фактора существует подход в рамках аддитивности, в
котором намеренно увеличивается число фрагментов за счет объемов замещающих фрагментов,
что приводит к обязательному выполнению всех условий из (1).
Приведем формулу для вычисления аналогового сигнала (АС) на выходе радиационно-чув-
ствительного преобразователя (РЧП) J для рентгеновского излучения с максимальной энергией
Emax, числовым энергетическим спектром f(E, Emax). Фотоны регистрируются РЧП из материала с
параметрами (ρs, Zs) толщиной hs. В этом случае искомая формула с точностью до коэффициентов
преобразования энергии CE(xd, yd) выглядит следующим образом:
J(
E
, x
,
y
)
=
I(E
, x
,
y
) +
B(x
,
y
)
=
max
d
d
max
d
d
d
d
Emax
=
C
(x
,
y
)N
(
x
,
y
)
E
(
E
,
h
)
f
(
E,
E
)exp
(
−
P
(
E,x
,
y
)
)
ε
(E,h
)dE+B(x
,
y
),
(8)
E d d
0
d
d
∫
ab
s
max
d
d
s
d
d
0
где N0 — обобщенный параметр, равный числу фотонов, попадающих на фронтальную по-
верхность соответствующей пикселю части РЧП за время формирования точки изображения;
Eab(E, hs) — среднее значение энергии, переданной РЧП зарегистрированным фотоном;
ε(E, hs) — эффективность регистрации; B — темновой сигнал.
Отметим, что значение Eab(E, hs) зависит от толщины РЧП hs и от его поперечных размеров as
и bs [23], а также от степени радиационной обособленности объемов РЧП, в которых формирует-
ся информация для точки ЦРИ.
Целью данной работы является не только разработка аддитивного подхода к описанию про-
странственных форм ОК, но и разработка быстродействующей имитационной модели формиро-
вания ЦРИ. Ускорение вычислительного процесса существенно зависит от реализуемости устра-
нения множественного повторения одного и того же набора операций. Для любой точки изобра-
жения и любого ОК в интегралах из формулы (8) есть повторяющаяся часть. Введем переменные
fab(E, Emax, hs) и Sab(Emax, hs):
E (E,h )f(E,E
)ε(
E,h
)
ab
s
max
s
f
(
E,E ,h
)
=
,
ab
max
s
S
(
E
max
,
h
s
)
ab
(9)
Emax
S
(
E
,h
)
=
E
(E,h
)
f
(
E
,
E
)ε(
E,h
)d
E
ab
max
s
∫
ab
s
max
s
0
Дефектоскопия
№ 8
2020
38
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
Функция fab(E, Emax, hs) представляет собой нормированное распределение поглощенной энер-
гии от всех фотонов с энергией E для ИРИ с максимальной энергией Emax, а Sab(Emax, hs) — погло-
щенная энергия зарегистрированного фотона из спектра рентгеновского излучения с максималь-
ной энергией Emax.
Выражение (8) с учетом формул (7) и (9) примет вид:
J(E
, x
,
y
)
=
C
(x
,
y
)N
(x
,
y
)S
(E
,h
)×
max
d
d
E d d
0
d
d
ab
max
s
E
max
N
(10)
×
(E,E ,h
)exp
−
c (x ,y )m(E,Z
)ρ
H (x ,y )dE+B(x ,y
).
∫ f
ab
max
s
∑
n d
d
n
n n d
d
d
d
0
n=1
Выражение (10) и является основной формулой аддитивного алгоритма формирования цифро-
вых радиографических изображений.
Приведем описание трансформации совокупности АС (10) в ЦРИ.
1.3. Трансформация совокупности аналоговых сигналов в цифровое радиографическое
изображение
При описании трансформации будем придерживаться модели [8, 22]. На первом этапе АС I
преобразуются аналогово-цифровым преобразователем (АЦП) с разрядностью kADC в цифровые
сигналы (ЦС) D:
J(E
max
,
x
d
,
y
d
)
C
ADC air
J
D(E
, x
,
y
)
=
,
∆=
,
(11)
max
d
d
k
ADC
∆
2
−1
здесь [arg] — целая часть arg; CADC, CADC > 1 — коэффициент защиты от превышения ЦС уровня
2kADC - 1; Jair — АС в случае ослабления воздухом.
На вход алгоритма калибровки в случае источника непрерывного излучения поступают три
типа цифровых сигналов: темновые — DB; ослабление воздухом — Dair; измерительные сигна-
лы — Dm. Калибровка состоит из калибровки по «черному» и по «белому». При калибровке по
«черному» устраняется вклад темновых сигналов, а в результате калибровки по «белому» оцени-
вается радиационная прозрачность ОК. Для испытуемых объектов со значительным перепадом
толщин АС изменяются в соответствии с (6) по экспоненциальному закону, поэтому для умень-
шения диапазона изменения конечного информативного сигнала величину, обратную радиацион-
ной прозрачности (кратность ослабления [8]), логарифмируют. Результатом последней операции
является оценка толщины ОК в д.с.п. Peff(Emax, xd, yd) для ИРИ с максимальной энергией Emax. Вся
указанная последовательность преобразований описывается выражением:
D
(E
,
x
,
y
)
−
D
(x
,
y
)
air
max
d
d
B d d
P
(E
, x
,
y
)= ln
(12)
eff
max
d
d
D
m
(E
max
,
x
d
,
y
d
)
−
D
(
x
B d d
,
y
)
Выражения (1)—(12), дополненные учетом случайности величин B(xd, yd), N0(xd, yd), Sab(Emax, hs),
определяют полноценную математическую модель формирования ЦРИ.
Сделаем два важных замечания, существенно упрощающие процесс имитационного моде-
лирования: 1) параметры распределений случайных величин (СВ) DB(xd, yd) (средние значения
D
(x
,
y
)
и среднеквадратические отклонения
σD
(
x
,
y
)
) определяются для аналога РРИ экс-
B d d
B d d
периментально; 2) произведение CE(xd, yd)N0(xd, yd)Sab(Emax, hs) в (10) будем рассматривать как еди-
ную случайную величину. Ее можно интерпретировать как энергию фотонов, поглощенную РЧП
при ослаблении воздухом. В этом случае:
C
(x
,
y
)N
(x
,
y
)S
(E
,
x
,
y
)
≈
D
(E
, x
,
y
),
E d d
0
d
d
ab
max
d
d
air
max
d
d
(13)
σ
(
C
(x
,
y
)N
(x
,
y
)
S
(
E
,
x
,
y
)
)
≈σ
(
D
(
E
,
x
,
y
)
)
E d d
0
d
d
ab
max
d
d
air
max
d
d
Правые части в системе (13) также оцениваются экспериментально для аналога РРИ.
Будем считать, что СВ DB(xd, yd) и Dair(xd, yd) распределены по Гауссу.
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
39
2. ПРИМЕРЫ ОПИСАНИЯ ПРОСТРАНСТВЕННЫХ ФОРМ ОБЪЕКТОВ И ИХ ЦИФРОВЫЕ
РАДИОГРАФИЧЕСКИЕ ИЗОБРАЖЕНИЯ
2.1. Тестовые объекты цифровой радиографии
Качество СЦР характеризуется рядом параметров, например, проникающей способностью,
контрастной чувствительностью и пространственным разрешением. Для оценки этих параметров
используются соответствующие эталоны СЦР. Ниже остановимся на описании пространственных
форм тестовых объектов (ТО), позволяющем оценить тот или иной параметр СЦР и получить ими-
тационные ЦРИ.
2.1.1. Эталон проникающей способности
Эталон проникающей способности служит для оценки предельных значений толщин ОК из
стали, для которых цифровые радиографические изображения ОК обладают информативностью.
Рассмотрим высокоэнергетические системы ЦР. Для описания ТО, предназначенного для оценки
проникающей способности, воспользуемся американским стандартом для определения качества
изображения рентгеновских и гамма-систем для проверки безопасности грузов и транспортных
средств [14]. Вышеупомянутый ТО состоит из стальных ослабляющих пластин толщиной Hst и
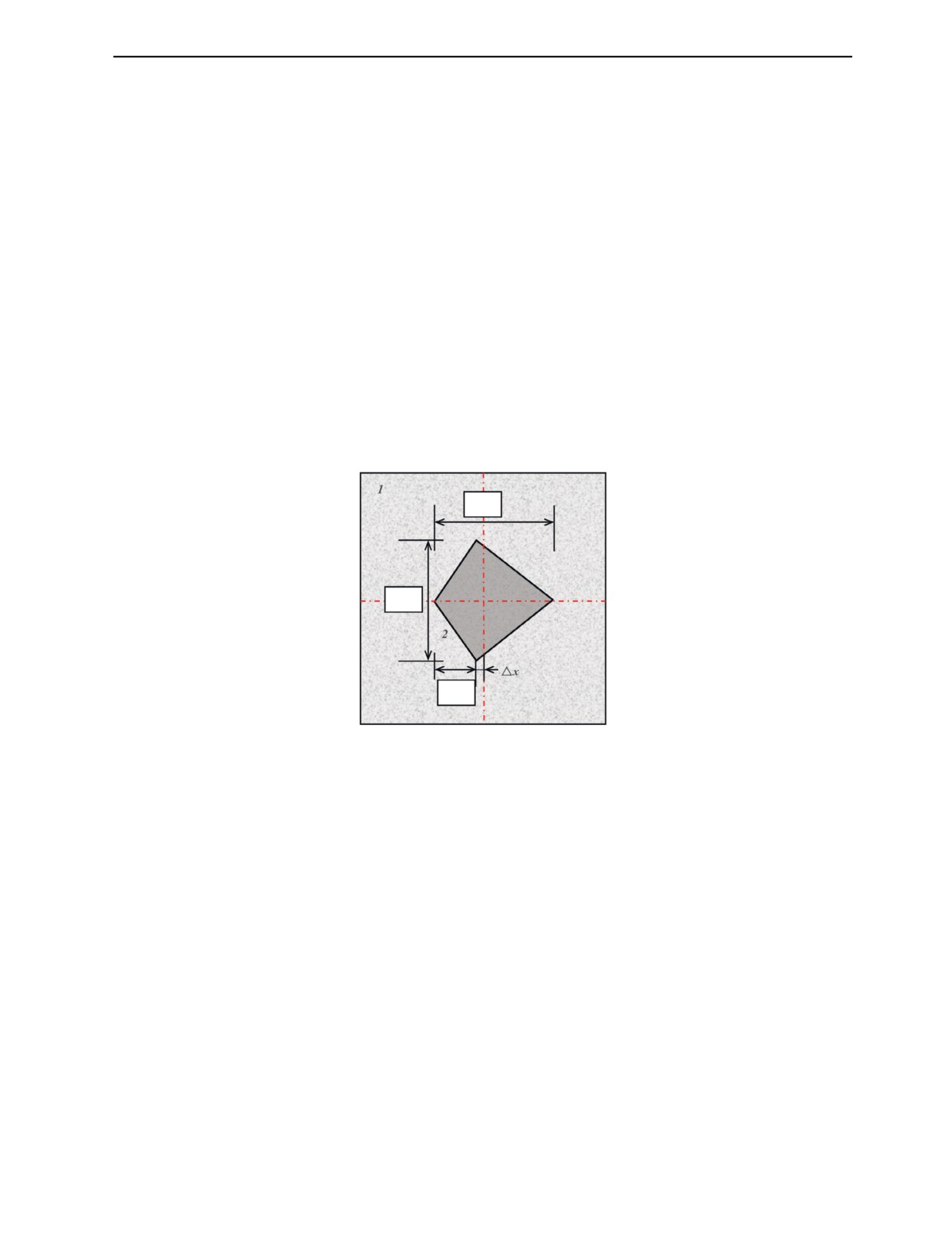
накладной центральной части, по форме напоминающей «наконечник стрелы» длиной 30 см и ши-
риной 30 см (см. рис. 1).
30
30
10
Рис. 1. Вид ТО для оценки проникающей способности [24]:
1 — стальная пластина размером 60×60 см2, 2 — «наконечник стрелы».
Толщина «наконечника стрелы» Ha, согласно [14], удовлетворяет соотношению
H
a
=
0,2(H
st
+H
a
).
(14)
По требованию стандарта оператор должен обнаружить на изображении не только «наконечник
стрелы», но уверенно указать его пространственную ориентацию. Центры масс «наконечника стре-
лы» и основных стальных пластин должны совпадать.
Для описания ТО воспользуемся общим подходом, предложенным выше. Для удобства введем
неподвижную декартову систему координат XOY, центр этой системы совпадает с центром основ-
ных пластин, оси OX, OY параллельны сторонам основных пластин ТО. Пусть центр ЦРИ разме-
ром 2A × 2A, A > 30, совпадает с точкой O. В соответствии с приведенным выше подходом имеем
дело с тремя множествами: V1 — множество точек над изображением; V2 — множество точек
основных пластин; V3 — множество точек «стрелы наконечника».
Для обеспечения удобства описания вращения «стрелы наконечника» относительно неподвиж-
ных пластин введем декартову систему координат XaOYa, которая отличается от системы XOY по-
воротом на угол θ. Ось Xa направлена в сторону острия «наконечника». Уравнения связи координат
x, y и xa, ya имеют вид:
x = x
a
cosθ-
y
a
sinθ,
(15)
y = x
sinθ+
y
cosθ
a
a
Дефектоскопия
№ 8
2020
40
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
Проекции множеств V1, V2, V3 на плоскость изображения — pV1, pV2, pV3 задаются следую-
щим образом:
pV
=
{
(x,
y):−
A≤ x≤ A,−
A≤ y≤ A
}
,pV
=
{
(x,
y):−30
≤
x
≤
30,−30
≤
y
≤
30
}
,
1
2
s = x
−∆x
a
(16)
pV3
=
(x
,
y
):
−1,5s ≤ y
≤1,5s, 0
≤
s
≤10
a
a
a
−15+
0,75(s
−10)
<
y
≤15−0,75(s
−10),10<
s
≤
30
a
Формула для задания pV3 работает совместно с (15), что придает ей универсальности.
Выражение (7) для рассматриваемого примера трансформируется в следующее:
−1,(x
,
y
)∈
prV
0,(x
,
y
)∈
prV
\ prV
3
d
d
1
d
d
1
2
P(
E
,
x
d
,
y
d
)
=
∑
1,(x
d
,
y
d
)
∈prV
2
×
m
st
(E
)ρ
st
×
H
st
,(
x
d
,
y
d
)
∈prV
2
\ prV
3
,
(17)
n=1
1,(
x
,
y
)∈
prV
H
+
H
,(
x
,
y
)
∈
prV
d
d
3
st
a
d
d
3
здесь mst, ρst — МКО и плотность стали.
Выражения (16), (17) в совокупности с предложенной имитационной моделью позволяют по-
строить реалистичные симуляции ЦРИ эталона проникающей способности.
В соответствии с (10), для построения имитационных изображений потребуется вычисление
Nx×Ny интегралов, здесь Nx, Ny — размеры изображений в пикселях по осям X и Y соответственно.
Например, для Nx=Ny=1000 потребуется вычислить 106 интегралов, что весьма затратно по време-
ни. Для ускорения вычислительного процесс применительно к исследуемому ТО просматривается
следующий подход. Для данного ТО существуют всего три уровня толщины 0, Hst, Hst +Ha. Соот-
ветственно для этих уровней вычисляются средние значения и среднеквадратические отклонения
АС, которые в дальнейшем используются при имитационном моделировании ЦРИ, значения АС в
каждой точке разыгрываются по закону Гаусса с соответствующими параметрами.
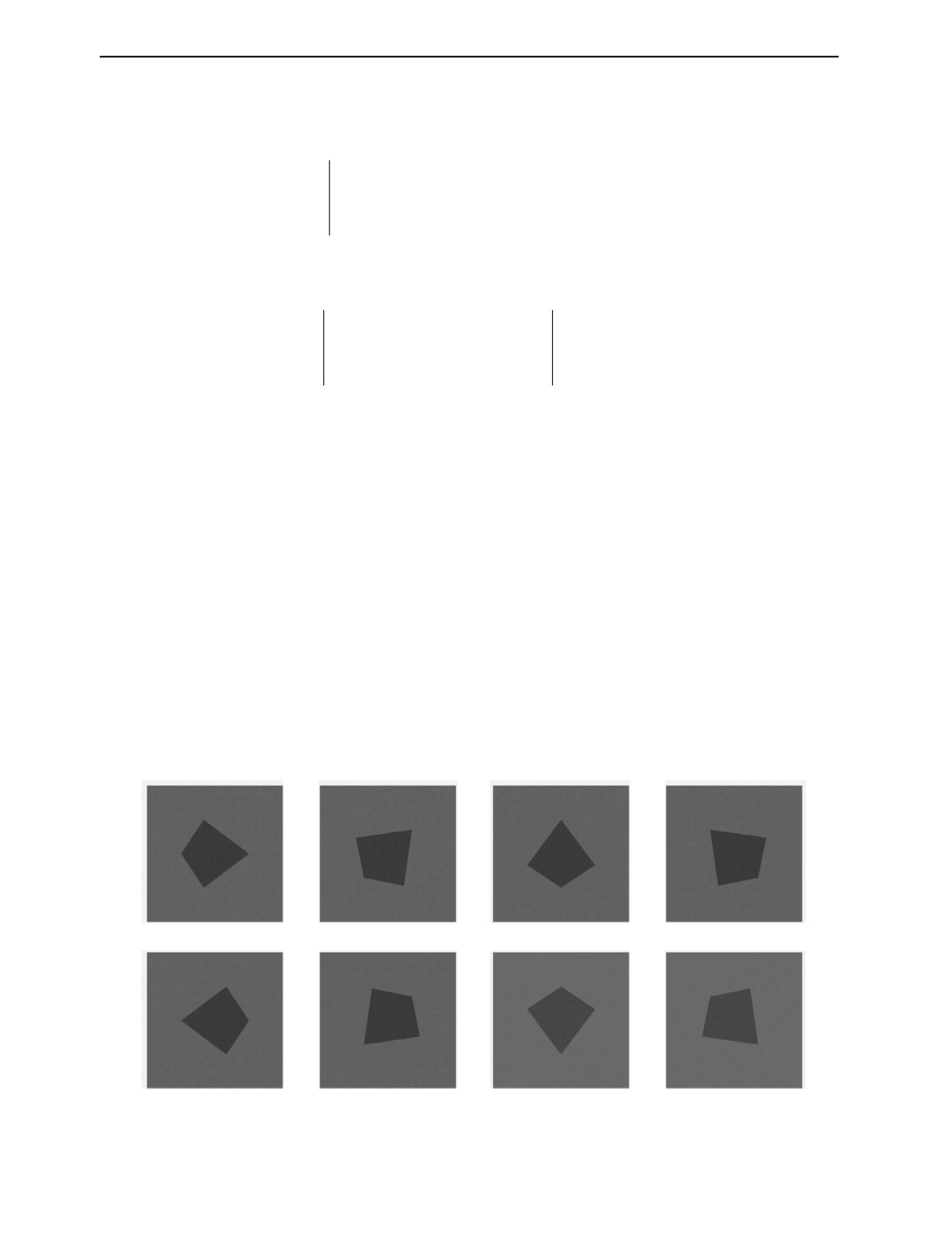
На рис. 2 приведены имитационные изображения ТО (см. рис. 1) при вариации угла θ для сле-
дующих условий: A = 350 мм; Emax = 9 МэВ; Hst = 160 мм; Ha = 40 мм; материал РЧП — CdWO4;
ad = bd = 1 мм; hd = 10 мм; N0 = 105. Моделирование проводилось с помощью программы, написанной
в системе для математических вычислений MathCad.
Изображения рассматриваемого ТО выглядят реалистично [11], время формирования ЦРИ раз-
мером 700×700 пикселей на ноутбуке с процессором Intel(R) Core(TM) i5-83000H CPU с частотой
2,30 ГГц не превосходит 5 с.
θ = 0
θ = π/4
θ = π/2
θ = 3π/4
θ = π
θ = 5π/4
θ = 3π/2
θ = 7π/4
Рис. 2. Имитационные изображения тестового объекта для оценки проникающей способности:
A = 350 мм; Emax = 9 МэВ; Hst = 160 мм; Ha = 40 мм; РЧП — CdWO4; ad = bd = 1 мм; hd = 10 мм; N0 = 105.
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
41
2.1.2. Эталон контрастной чувствительности
Контрастной чувствительностью для заданной толщины объекта называется отношение мини-
мального приращения толщины, видного на ЦРИ, к толщине объекта [14, 24]. Существуют эталоны
для оценки контрастной чувствительности: ступенчатые; ступенчатые с отверстиями; канавочные;
проволочные; накладные пластины.
Для иллюстрации рассмотрим аналог ступенчатого эталона H13 по EN 462-2 с увеличенны-
ми размерами пластин (рис. 3). Эталон состоит из шести элементов толщиной Ha, равной 2; 2,5;
3,2; 4; 5; 6,3 мм, толщина ступени и диаметр главных отверстий для каждого элемента совпадают.
Для имитационного моделирования ЦРИ были приняты следующие условия: размер изображе-
ния A = 400 мм; стальная пластина размером 350×350 мм2 отцентрирована относительно оси X;
Emax = 9 МэВ; толщина ослабляющей пластины Hst = 100 мм; материал РЧП — CdWO4; ad = bd =
= 0,2 мм; hd = 0,1 мм; N0 = 106. Дополнительные отверстия имеют диаметры в два и четыре раза
превосходящие толщины соответствующих пластин. На рис. 3 жирной точкой отмечено начало от-
счета ступеней.
Y
Z
1
2
X
2
O
X
O
1
Hst
Вид сверху
Вид сбоку
Рис. 3. Вид ТО для оценки контрастной чувствительности, аналог [24]:
1 — стальная пластина размером 35×35 см2, 2 — ступенчатый эталон с отверстиями.
Общее количество фрагментов ТО — 26. Выберем поперечный размер пластин Aa = Ba, исходя
из Ha max = max(Ha). Можно выбрать Aa = Ba = 8,8Ha max. Вращение эталона учитывается с помо-
щью системы (15). Координаты краев ступеней по оси x находятся по формуле x0 n = -3Aa+(n-1)Aa,
n = 1…6. Для указания противоположного края эталона введем координату x07 = 3Aa. На ступени с
номером n, n = 1 ... 6, имеются три отверстия, радиусы Rj n, j = 1 ... 3, которых связаны с толщиной
ступеней Han соотношениями — R1n = 2Hn, R2n = Hn/2, R3n = 2Hn. Центры отверстий располагаются по
оси ступенчатого эталона (y = 0) на расстоянии Δa от края каждой ступени Δa = 0,28Aa; 0,6Aa; 0,82Aa.
С учетом приведенных параметров геометрической схемы ТО выражения для описания проекций
pV1, pV2, …, pV26 имеют вид:
pV
=
{
(x,
y):
x
≤
A,
y
≤
A
}
,pV
=
{
(x,
y):
x
≤175,
y
≤175
}
,
i
=
3...26,
1
2
i
−
2
k
=
+1,
iv
=
4(k
−1)
+2
4
−
y
≤
y
≤
y
,
x
≤
x
≤
x
,iv = i
0
a
0
0k
a
0k+1
2
2
L
=
(
x
−
x
−1,5H
)
+
y
(18)
1
a
0k
amax
a
pV
=
(x
,
y
):
i
a
a
2
2
L
=
(
x
−
x
−4,5
H
)
+
y
←-y
≤
y
≤
y
, x
≤
x
≤
x
,iv ≠ i
2
a
0k
amax
a
0
a
0
0k
a
0k+1
2
L
=
(
x
−
x
−7,5
H
)2
+
y
3
a
0k
amax
a
−
y
≤
y
≤
y
,
x
≤
x
≤
x
,iv ≠ i,
(
L
≥
0∨
L
≥
0∨
L
≥
0
)
0
a
0
0k
a
0k+1
1
2
3
Дефектоскопия
№ 8
2020
42
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
В (18) [arg] есть целая часть arg. Некоторая громоздкость выражения (18) оправдывается слож-
ностью описываемого тестового объекта.
В результате объединения (7) и (18) получим:
P(E,x
,
y
)
=
m
(E)ρ
×
d
d
st
st
−1,(x
,
y
)∈prV
d
d
1
0,(x
,
y
)
∈prV
\ prV
d
d
1
2
1,(x
,
y
)
∈prV
d
d
2
26
3
1,(x
,
y
)
∈prV
d
d
n
×
+1
×
H
,(x
,
y
)∈prV
\
prV
prV
(19)
∑
st
d
d
2
n
n
4
+1
+1+i
n=1
i=1
4
4
3
−1,(x
,
y
)∈
prV
3
d
d
n
+1+i
i=1
H
+
H
,(x
,
y
)
∈
prV
\
prV
4
st
a
n
d
d
n
n
+1
+1
+1+i
4
i=1
4
4
При моделировании воспользуемся подходом с ограниченностью количества уровней ЦС.
На рис. 4 приведены результаты имитации ЦРИ ТО при вращении эталона чувствительности
для приведенных выше условий и вариацией его геометрического положения. Моделирование про-
водилось в системе для математических вычислений MathCad. Для лучшего восприятия диапазон
изменения яркости откорректирован.
θ = 0
θ = π/4
θ = π/2
θ = 3π/4
θ = π
θ = 5π/4
θ = 3π/2
θ = 7π/4
Рис. 4. Имитационные изображения тестового объекта для оценки контрастной чувствительности:
A = 400 мм; Emax = 9 МэВ; Hst = 100 мм; Ha = 2, 2,5, 3,2, 4, 5, 6,3 мм; РЧП — CdWO4; ad = bd = 0,2 мм; hd = 0,1 мм; N0 = 106.
Время моделирования одного изображения составило около 70 с, что оправдано усложнением
вычислений и увеличением изображения до 2000×2000 пикселей. Как и в первом случае качество
имитации можно признать удовлетворительным [15, 19].
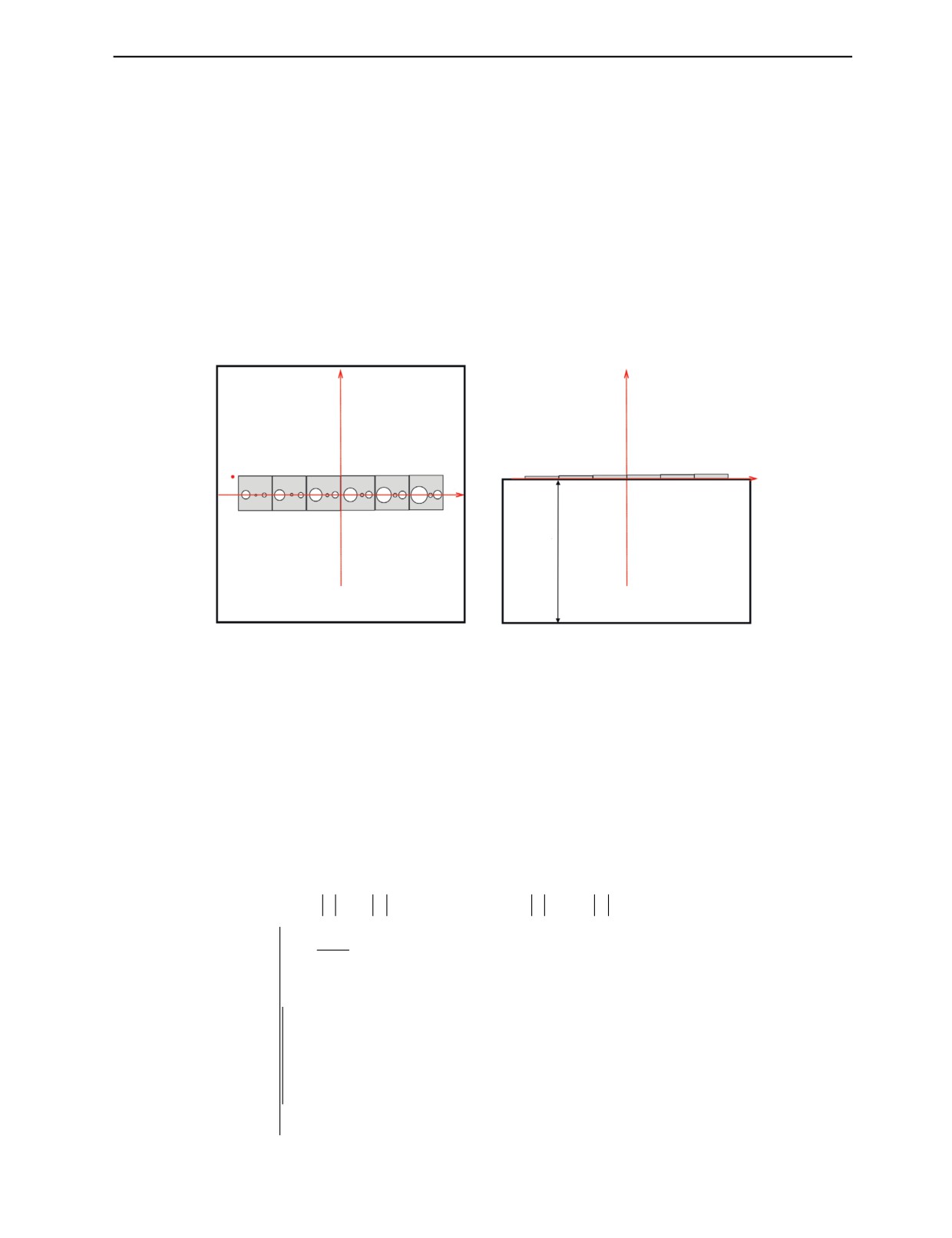
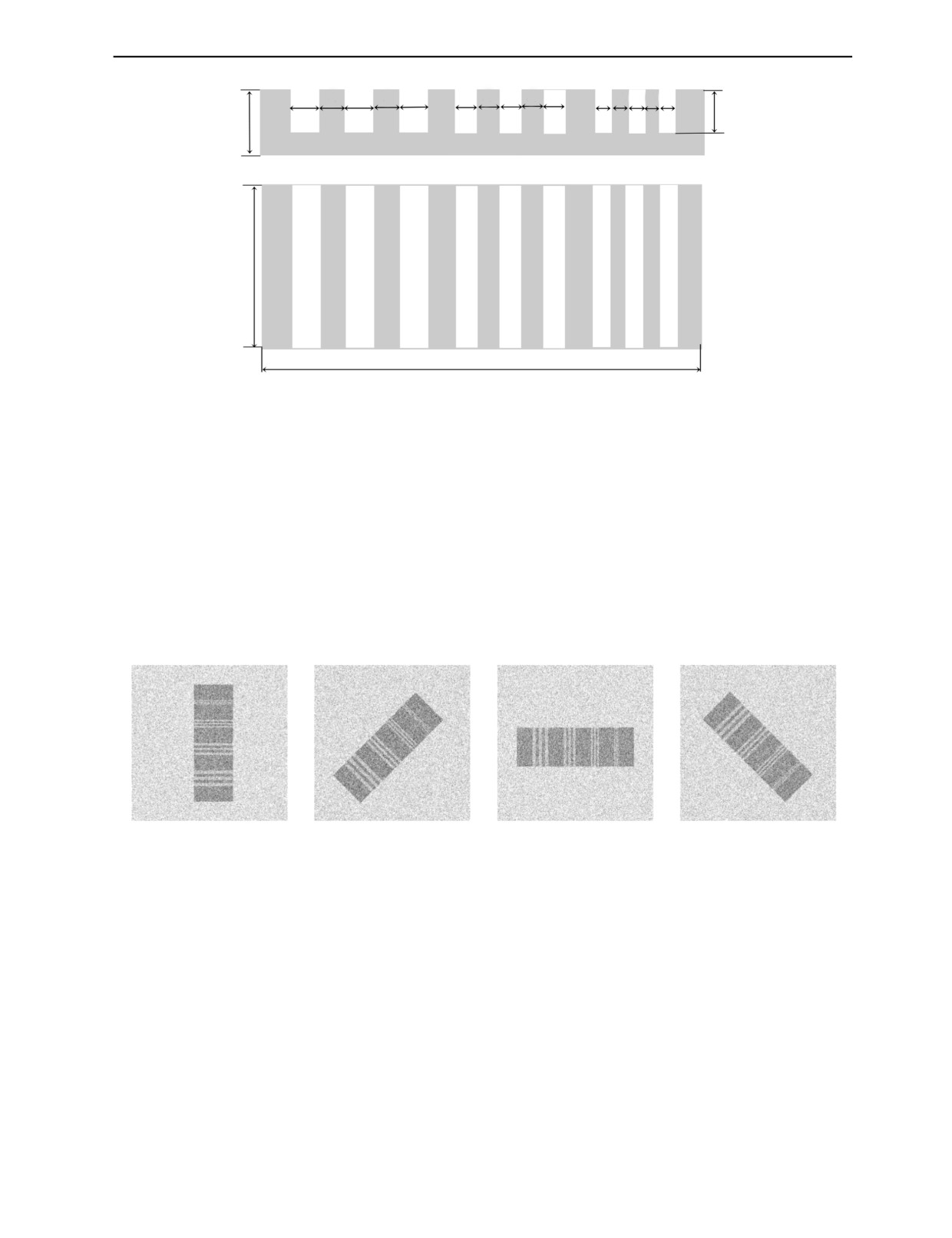
2.1.3. Канавочный эталон разрешающей способности
Для оценки разрешающей способности систем ЦР используют проволочные и канавочные эта-
лоны [14, 24, 25]. Остановимся на канавочных эталонах. Эталон представляет собой стальную
пластину толщиной h с несколькими группами канавок одной и той же глубины Δ. Общее число
канавок должно быть кратно 3. В k-ой группе имеется три последовательные канавки шириной dk
(рис. 5), расстояние между канавками также равно dk. Количество групп и шаг уменьшения (увели-
чения) определяется размерами пикселя.
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
43
d1
d1
d1
d1
d1
d2
d2
d2
d2
d2
d3
d3 d3 d3 d3
Δ
h
Вид сбоку
S
L
Вид сверху
Рис. 5. Эталон для оценки пространственного разрешения.
Для иллюстрации рассмотрим аналог стального эталона пространственного разрешения с
четырьмя группами канавок. Выбраны следующие параметры системы ЦР: Emax = 9 МэВ; размер
изображения — A×A = 200×200 мм2; эталон — стальная пластина размером S×L = 50×150 мм2
толщиной h = 30 мм с канавками глубиной — Δ = 20 мм; ширина канавок изменяется от d1 = 1 мм
до d4 = 4 мм с шагом 1 мм; материал РЧП — CdWO4; ad = bd = 1 мм; hd = 1 мм; N0 = 104. Для дан-
ного объекта существует 6 уровней цифровых сигналов при 14 фрагментах. Подход к описанию
данного ТО близок по сложности к (18), (19) и соответствующая формула не менее громоздка,
поэтому приводить ее не будем.
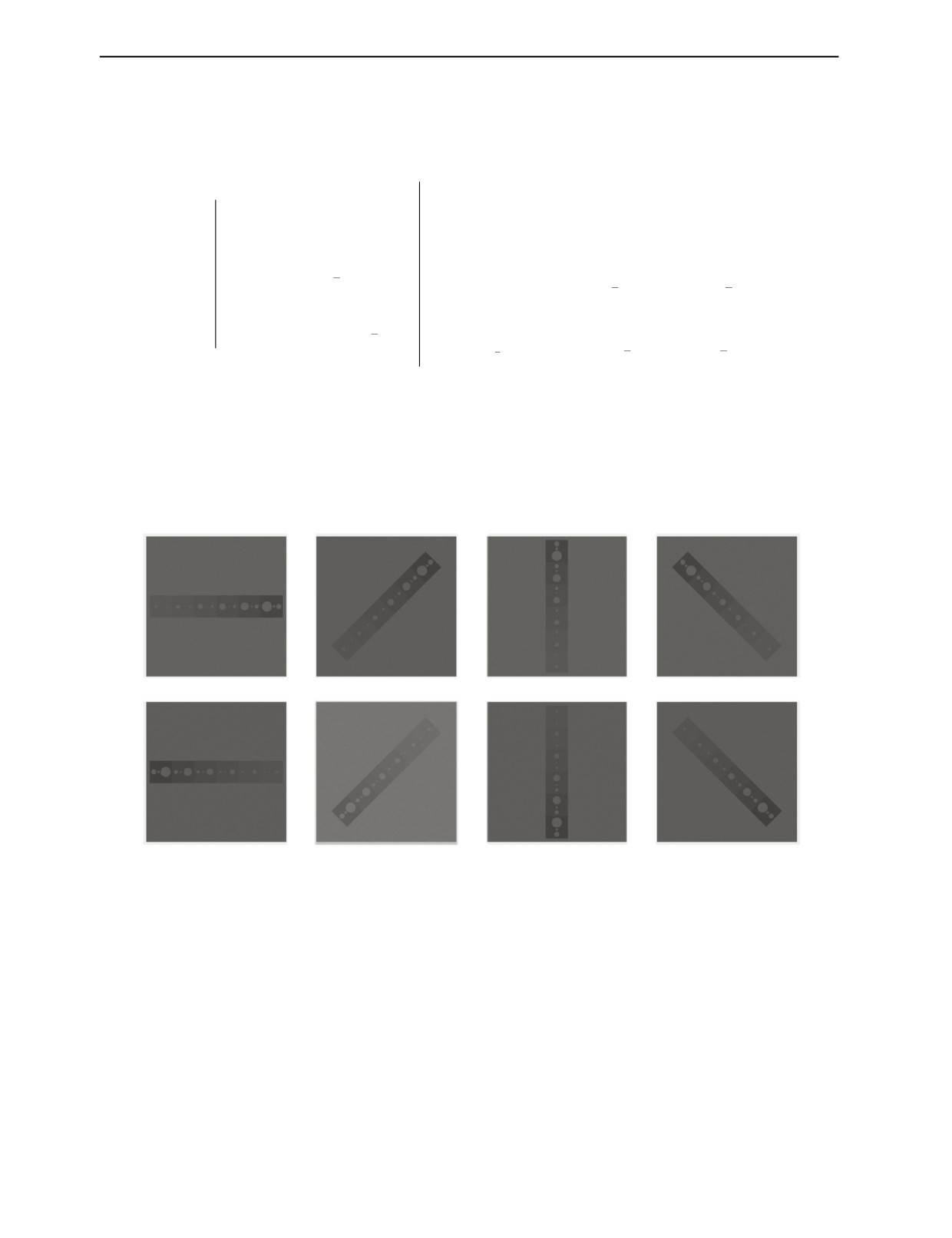
На рис. 6 приведены результаты имитационного моделирования цифровых радиографических
изображений.
θ = 0
θ = π/4
θ = π/2
θ = 3π/4
Рис. 6. Имитационные изображения тестового объекта для оценки пространственного разрешения:
Emax = 9 МэВ; РЧП — CdWO4; ad = bd = 1 мм; hd = 1 мм; d1 = 1 мм; d2 = 2 мм; d3 = 3 мм; d4 = 4 мм; h = 30 мм; ∆ = 20 мм;
N0 = 104.
Изображения ТО для оценки пространственного разрешения системы ЦР, приведенные на
рис. 6, выглядят вполне реалистично [26, 27].
Для моделирования изображений за плоским ослабляющим барьером к модели ТО добавля-
ется дополнительный фрагмент (барьер) и соответствующий уровень ЦС.
Следует отметить, что моделирование ЦРИ объектов с фрагментами с размерами, сопостави-
мыми с размерами пикселя, отличается высокой аналитической сложностью и вычислительной
сложностью, связанными с необходимостью учета частичного перекрытия пикселей тенями от-
меченных фрагментов. Для устранения этого при моделировании изображений подобных объек-
тов эффективно применение метода трансформации изображений с мелкой апертурой в изобра-
жения с крупной (реальной) апертурой. Именно такой подход использован для имитационного
моделирования изображений, представленных на рис. 6.
Дефектоскопия
№ 8
2020
44
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
2.2. Примеры индустриальных изделий
Промышленность производит огромное разнообразие изделий, поверхности таких объектов и
элементов их внутренней структуры допустимо заменять некоторыми гладкими поверхностями,
например, цилиндрическими, сферическими, эллиптическими, коническими и т.п.
Разумеется, с точки зрения рассматриваемых в статье вопросов фигуры с однородным содер-
жимым не представляет интереса. Однако моделирование цифровых радиографических изобра-
жений таких объектов с дефектами может быть осуществлено с помощью предложенного выше
метода. Рассмотрим несколько примеров.
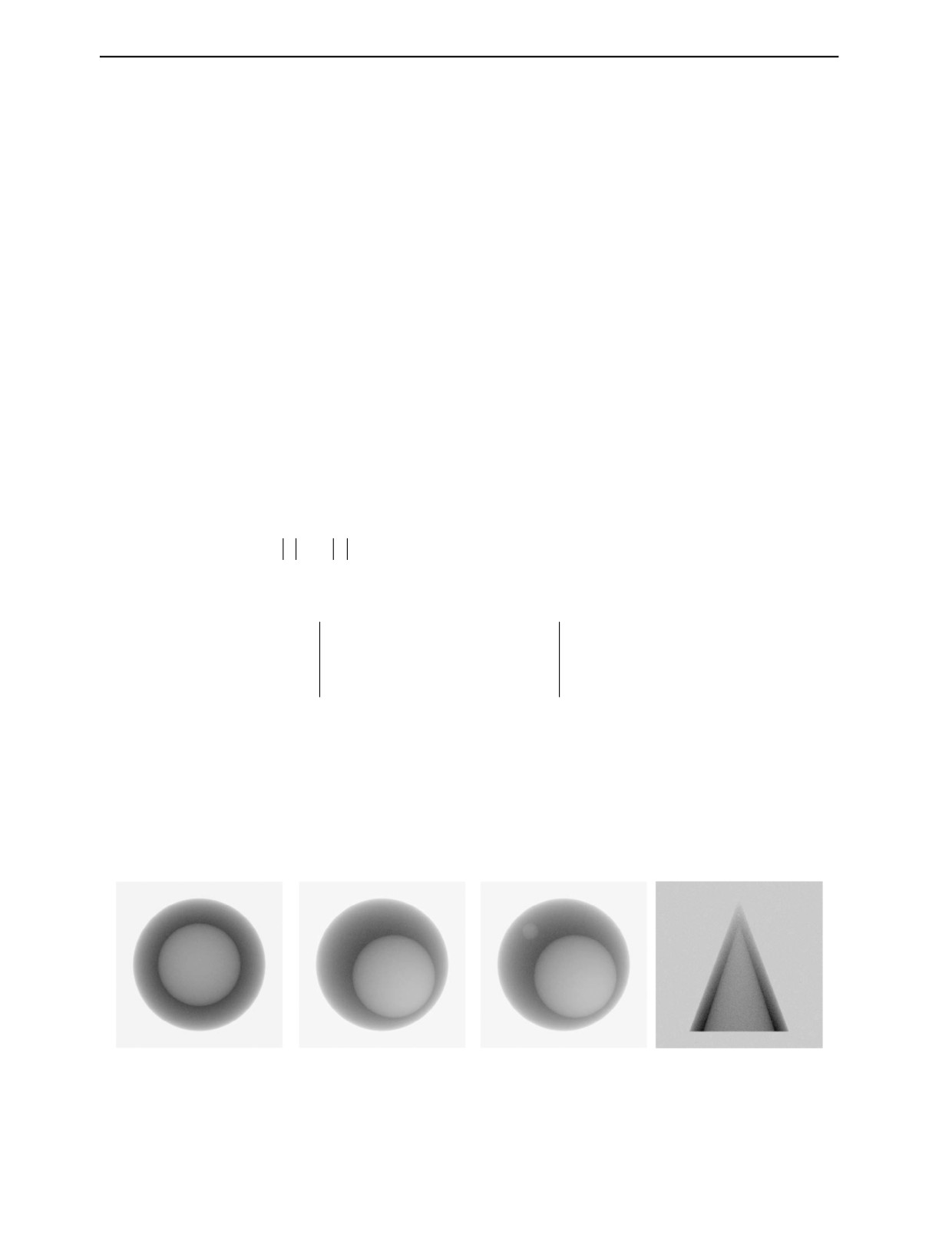
2.2.1. Полый шар
Рассмотрим полый шар радиусом R0 из циркония (Zr), тень которого полностью помещается на
РЧП размером 2A×2A. Введем систему координат XOY с осями, параллельными сторонам квадрата.
Центр проекции шара на РЧП может не совпадать с центром квадрата 2A×2A — O. Пусть координа-
ты проекции центра шара — (x0, y0). По условию рассматриваемый объект является полым шаром.
Пусть радиус внутренней сферы равен R1, а центр ее проекции смещен относительно внешней
проекции на (Δx, Δy).
Проекция множества точек pG(R, xc, yc), составляющих шар радиусом R с центром в точке xc, yc,
на плоскость РЧП описывается выражением:
2
2
2
pG R,x
,
y
)
{
= x,
y):(x-x
)
+(y-y
)
≤R
}
(20)
c
c
c
c
Очевидно, что ОК состоит из трех фрагментов, проекции которых pV1, pV2, pV3 определяются
следующим образом:
pV
=
(x, y):
x
≤
A,
y
≤
A
, pV
= pG(
R
,
x
,
y
), pV
= pG(
R
,
x
+∆x,
y
+ ∆y).
(21)
1
{
}
2
0
0
0
3
1
0
0
Выражение (7) для рассматриваемого примера трансформируется в следующее:
−1,(x
,
y
)∈
prV
0,(x
,
y
)∈
prV
\ prV
3
d
d
1
d
d
1
2
P(E,x
,
y
)
=
1,(x
,
y
)
∈prV
×m
(
E)ρ
×
H
,(x
,
y
)
∈prV
\ prV
,
(22)
d
d
∑
d
d
2
Zr
Zr
ex
d
d
2
3
n=1
-1,(x
,
y
)∈
prV
H
,(
x
,
y
)∈
prV
d
d
3
in
d
d
3
здесь Hex, Hin — хорды для внешней и внутренней сфер, проходящие через точку (xd, yd).
Моделирование проводилось для следующих условий: Emax = 4,5 МэВ; размер изображения —
2A×2A = 100×100 мм2; R0 = 40 мм; x0 = 0, y0 = 0; R1 = 25 мм; Δx = 0, Δy = 0 и Δx = 7 мм, Δy = 7 мм;
материал РЧП — CdWO4; ad = bd = 0,1 мм; hd = 0,3 мм; N0 = 103. Для случая смещения внутренней
сферы рассматривалось дополнительное введение сферы радиусом R2 = 5 мм. На рис. 7 приведены
результаты имитационного моделирования.
Шар с центральной
Шар со смещенной
Конический полый
полостью
полостью
Шар с двумя полостями
наконечник с дефектом
Рис.7. Модельные цифровые радиографические изображения.
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
45
2.2.2. Полый конический наконечник
Во многих отраслях промышленности используются конические наконечники для обеспечения
наибольшего проникновения объектов с этими наконечниками в твердую среду или для эффектив-
ного разрушения этой среды. Для обеспечения некоторых свойств наконечник выполняют полым.
Основной причиной отказов изделий с коническими наконечниками являются дефекты в области
острия наконечника.
Рассмотрим стальной наконечник длиной L с радиусом основания R, форма внутреннего воз-
душного конуса подобна внешней поверхности, радиус внутреннего конуса — Ra, в острие нако-
нечника располагается сферический дефект радиусом rd.
Свяжем начало системы координат O с точкой на границе РЧП, ось OY совпадает с осью кону-
са. Тень конуса полностью принадлежит поверхности РЧП размером 2A×2A. Острие наконечника
конуса совпадает с точкой (0, yc).
Проекция конуса с указанными выше параметрами pG(R, L, yc) на плоскость РЧП описывается
выражением
L
pG
c
(R,L,
y
c
)
=
(x,
y):
x
≤
y
,
y
c
≤
y ≤ y
c
+
L
(23)
R
Очевидно, что ОК состоит из четырех фрагментов, проекции которых pV1, pV2, pV3, pV4 опре-
деляются следующим образом:
R
L
R
L
1
1
pV
=
{
(x,
y):
x
≤
A,0
≤
y ≤ B
}
,
pV
=
pG
(
R L,
y
),
pV
=
pG
R
,
,
y
+
L−
,
1
2
c
0
c
3
c
1
c
R
R
(24)
0
0
pV
4
=
pG
(
s d
r
,0,
y
s
).
Выражение (7) для рассматриваемого примера трансформируется в следующее:
−1,(
x
,
y
)
∈
prV
0,(
x
,
y
)∈
prV
\ prV
d
d
1
d
d
1
2
3
1,(x
,
y
)
∈
prV
H
,(
x
,
y
)
∈
prV
d
d
2
s
d
d
4
P(
E,
x
,
y
)
=
×
m
(
E)ρ
×
,
(25)
d
d
∑
Zr
Zr
n=1
−1,(
x
d
,
y
d
)
∈
prV
3
H
ex
,(x
d
,
y
d
)
∈prV
2
\ prV
3
\ prV
4
−1,(
x
,
y
)
∈
prV
H
,(
x
,
y
)∈
prV
d
d
4
in
d
d
3
здесь Hex, Hin, Hs — хорды для внешнего и внутреннего конусов и сферического дефекта, проходя-
щие через точку (xd, yd).
Моделирование проводилось для следующих условий: Emax = 1,25 МэВ; размер изображения —
100×100 мм2; R0 = 30 мм; x0 = 0, y0 = yc; R1 = 12,5 мм; rd = 1 мм, Δx = 0, Δy = 0 и Δx = 7 мм, Δy = 7 мм;
материал РЧП — CdWO4; ad = bd = 0,2 мм; hd = 0,3 мм; N0 = 103.
Изображения, приведенные на рис. 7, подтверждают эффективность аддитивного метода моде-
лирования ЦРИ с учетом пространственных форм ОК применительно к проектированию систем.
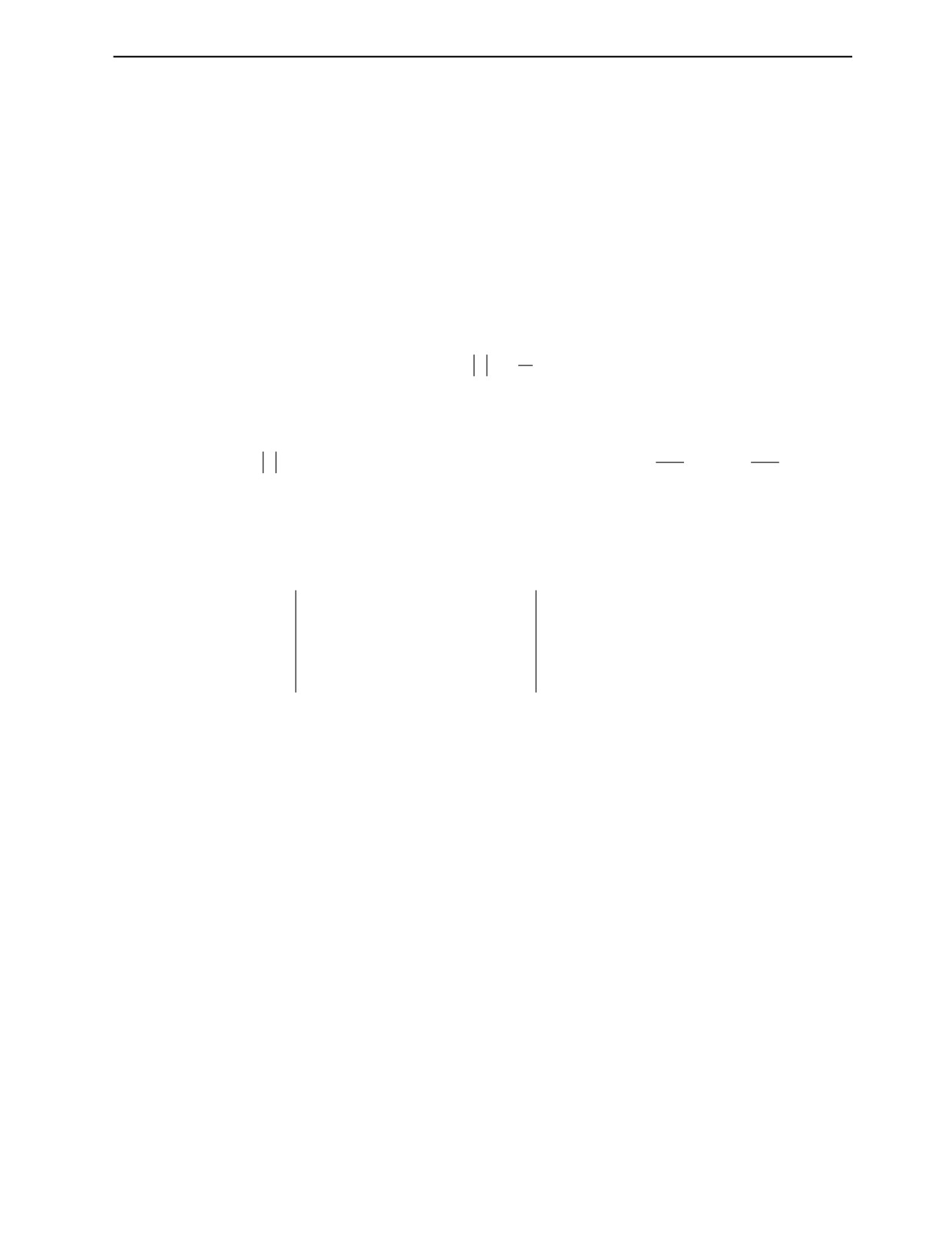
3. ОБСУЖДЕНИЕ
Рассмотренные выше примеры тестовых объектов и объектов контроля не полностью исчерпыва-
ют сложности пространственных форм реальных объектов. Тестовые объекты для оценки проника-
ющей способности, контрастной чувствительности и пространственного разрешения применяются
соответственно стандартам с указанием ориентации относительно источника и регистратора излуче-
ния. Фрагменты примеров ОК являются телами вращения и их описание не отличается сложностью.
Многие детали машин, механизмов и оборудованию имеет форму прямоугольных параллеле-
пипедов. Для иллюстрации достаточно рассмотреть кубы. Радиационные тени кубов на плоскость
РЧП при изменении ориентации их граней имеют более сложную форму, чем объекты из примеров.
Отмеченные тени усложняются при наличии внутренних полостей в кубах, если эти полости име-
ют форму кубов и ориентацию в пространстве, отличающуюся от внешних кубов.
Логично ввести неподвижную декартову систему координат XOYZ и подвижную систему ко-
ординат XaOYaZa, связанную с кубом. Точка O связана центром куба. Система координат XaOYaZa
получается поворотом системы XOYZ. Пусть с поворотом относительно оси X связан угол θ, с осью
Y — угол φ и с осью Z — угол χ. Соответствующие матрицы вращения Mx, My, Mz имеют вид:
Дефектоскопия
№ 8
2020
46
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
1
0
0
cosϕ
0
sinϕ
cosχ
sinχ
0
M
=
0
cosθ
sinθ
,
M
=
0
1
0
,M
=
-sinχ
cosχ
0 .
(26)
x
y
z
0
−sinθ
cosθ
−sinϕ
0
cosϕ
0
0
1
Координаты (x, y, z) и (xa, ya, za) связаны соотношением:
x
a
x
y
=
M
y
(27)
a
z
z
a
В качестве матрицы M выбираются матрицы Mx, My, Mz или их произведения в зависимости от
каких осей осуществляются повороты.
Введение системы координат XaOYaZa существенно облегчает проверку принадлежности точки
кубу, вне зависимости от ориентации его граней относительно исходной системы координат XOYZ.
В качестве ОК рассмотрим пластину из циркония толщиной 10 мм размером 95×95 мм2 с до-
полнительным кубом размером 40 мм. Варьировали углы θ, φ и χ. Моделирование проводилось
для следующих условий: Emax = 4,5 МэВ; размер изображения — 100×100 мм2; материал РЧП —
CdWO4; ad = bd = 0,2 мм; hd = 0,3 мм; N0 = 104. Моделирование осуществляли для цельного куба и
куба с полостью в форме куба размером 10 мм.
Отметим, что рассматриваемая задача относится к вопросам машинного зрения и традиционно
решается геометрическими методами. Геометрическое решение отличается громоздкостью и, соот-
ветственно, сложностью вычислений. Для данного примера моделирования для вычисления толщи-
ны H(xd, yd) фрагмента G по лучу L(xd, yd) в качестве альтернативы был использован общий подход:
1,(x
,
y z)∈G
d
d
H(x
,
y
)
=
dz
(28)
d
d
∫
0,(x
,
y
, z)∉G
L(x
,
d d
y
)
d
d
Очевидно, что подход, основанный на (28), не отличается высокой производительностью, но он
абсолютно универсален и интуитивно понятен для любых фрагментов ОК, разумеется, если они
допускают аналитическое описание либо имеют численную модель [19].
На рис. 8 приведены результаты имитационного моделирования соответствующих радиогра-
фических изображений. Полученные изображения иллюстрируют эффективность предлагаемого
Куб без поры
Вращение относительно
Вращение относительно
Вращение относительно
Вращение относительно
оси X на 45°
осей X, Y на 45°
осей Y, Z на 45°
осей X, Y, Z на 45°
Куб с порой, вращение поры относительно осей X, Y, Z на 45°
Вращение относительно
Вращение относительно
Вращение относительно
Вращение относительно
оси X на 45°
осей X, Y на 45°
осей Y, Z на 45°
осей X, Y, Z на 45°
Рис. 8. Имитационные цифровые радиографические изображения кубов за ослабляющей пластиной (материал куба и
пластины—цирконий).
Дефектоскопия
№ 8
2020
Имитационное моделирование в цифровой радиографии...
47
подхода к имитационному моделированию достаточно сложных объектов контроля с фрагментами
с различной пространственной ориентацией.
Очевидно, что предлагаемый подход к имитационному моделированию ЦРИ с учетом про-
странственных форм объектов контроля представляет особый интерес и в компьютерной томо-
графии, особенно в связи с развитием аддитивных технологий производства технических изде-
лий [28].
ЗАКЛЮЧЕНИЕ
Предложен подход к описанию пространственных форм объектов контроля применительно к
имитационному моделированию цифровых радиографических изображений. Имитационные мо-
дели предназначены для обоснования технической реализуемости задачи контроля объектов и для
выбора параметров и оценки характеристик соответствующих систем цифровой радиографии и
компьютерной томографии на стадии их проектирования. Для иллюстрации возможностей пред-
ложенного подхода к описанию пространственных форм и эффективности разработанных алго-
ритмов были получены симуляции цифровых радиографических изображений некоторых объек-
тов, включая эталоны чувствительности, пространственного разрешения, разрешающей способ-
ности, проникающей способности.
СПИСОК ЛИТЕРАТУРЫ
1. Seeram E. Digital radiography: an overview / Digital Radiography. Springer, Singapore,
2019.
2. Yahaghi E., Movafeghi A., Rokrok B., Mirzapour M. Defects detection of digital radiographic images of
aircraft structure materials via geometric locally adaptive sharpening // Research in Nondestructive Evaluation.
3. Mery D. Computer vision technology for X-ray testing // Insight-non-destructive testing and condition
4. Khorshidi A., Khosrowpour B., Hosseini S.H. Determination of defect depth in industrial radiography
imaging using MCNP code and SuperMC software // Nuclear Engineering and Technology. 2019. https://doi.
org/10.1016/j.net.2019.12.010
5. Siryabe E., Juliac E., Barthe A., Ferdinand C. X-ray digital detector array radiology to infer sagging
ndteint.2020.102238
6. Du W., Shen H., Fu J., Zhang G., He Q. Approaches for improvement of the X-ray image defect detection
of automobile casting aluminum parts based on deep learning // NDT & E International. 2019. V. 107. Article
7. Ewert U., Zscherpel U., Jechow M. Essential parameters and conditions for optimum image quality in
digital radiology / 18th World conference on nondestructive testing. Durban, South Africa, 2012. P. 16—20.
8. Osipov S.P., Zhang G.L., Chakhlov S.V., Shtein M.M., Shtein A.M., Trinh V.B., Sirotyan E. Estimation
of parameters of digital radiography systems // IEEE Transactions on Nuclear Science. 2018. V. 65. No. 10.
9. Yaffe M.J., Rowlands J.A. X-ray detectors for digital radiography // Physics in Medicine & Biology.
10. Silvan A.S.S., Oliveira D.F., Gomes C.S., Azeredo S.R., Lopes R.T. Evaluation of digital detector arrays
systems for industrial radiography // Brazilian Journal of Radiation Sciences. 2019. V. 7. No. 2A. https://doi.
org/10.15392/bjrs.v7i2A.601
11. Oh K., Kim J., Kim S., Chae M., Lee D., Cha H., Lee B. Evaluation and optimization of an image
acquisition system for dual-energy cargo inspections // IEEE Transactions on Nuclear Science. 2018. V. 65.
12. Raad J.A., Kuiper A. Industrial radiography image forming techniques (General Electric Company,
13. Deyhle H., Towsyfyan H., Biguri A., Mavrogordato M., Boardman R., Blumensath T. Spatial
resolution of a laboratory based X-Ray cone-beam laminography scanning system for various trajectories //
14. American national standard for determination of the imaging performance of X-ray and gamma-ray
systems for cargo and vehicle security screening. Standard ANSI N42.46, 2008.
15. Khan M., Brothers M., Gillis T. Computed radiography for high resolution imaging applications of
aircraft structures / 11th International Symposium on NDT in Aerospace — Paris-Saclay, France, 2019. https://
Дефектоскопия
№ 8
2020
48
С.П. Осипов, И.Г. Ядренкин, С.В. Чахлов и др.
16. Haith M.I., Ewert U., Hohendorf S., Bellon C., Deresch A., Huthwaite P., Lowe M.J.S.,
Zscherpel U. Radiographic modelling for NDE of subsea pipelines // NDT&E Int. 2017. V. 86. P. 113—122.
17. Keller W.J., Pessiki S. Enhancing radiographic imaging of cementitious materials in composite structures
with photon attenuating inclusions // Research in Nondestructive Evaluation. 2019. V. 30. No. 4. P. 231—251.
18. Kumar S., Menaka M., Venkatraman B. Radiographic simulation and validation studies on weld joints
of annular tanks and cylindrical tanks // IOP Conference Series: Materials Science and Engineering. IOP
19. Yao M., Kaftandjian V., Peterzol-Parmentier A., Schumm A., Duvauchelle P. Hybrid Monte Carlo and
deterministic simulation approach for modeling a computed radiography imaging chain from X-ray exposure to
optical readout // Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers,
20. Kengyelics S.M., Treadgold L.A., Davies A.G. X-ray system simulation software tools for radiology
and radiography education // Computers in biology and medicine. 2018. V. 93. P. 175—183. https://doi.
org/10.1016/j.compbiomed.2017.12.005
21. Udod V.A., Osipov S.P., Wang Y. The mathematical model of image, generated by scanning digital
radiography system // IOP Conference Series: Materials Science and Engineering. IOP Publishing, 2017.
22. Osipov S.P., Chakhlov S.V., Kairalapov D.U., Sirot’yan E.V. Numerical modeling of radiographic
images as the basis for correctly designing digital radiography systems of large-sized objects // Russian Journal
С.П., Чахлов С.В., Кайролапов Д.У., Сиротьян Е.В. Численное моделирование радиографических изо-
бражений — основа корректного проектирования систем цифровой радиографии крупногабаритных
объектов // Дефектоскопия. 2019. No. 2. С. 43—55.]
23. Zav’yalkin F.M., Osipov S.P. Dependence of the mean value and fluctuations of the absorbed energy on
BF01123317
24. ASTM E1025 — Standard practice for design, manufacture, and material grouping classification of
hole-type image quality indicators (IQI) used for radiology, ASTM International, West Conshohocken, PA,
2018. 37 p.
25. Halmshaw R. Radiographic techniques: principles / Industrial Radiology. Springer, Dordrecht, 1995.
26. Rueckel J., Stockmar M., Pfeiffer F., Herzen J. Spatial resolution characterization of a X-ray microCT
27. Huda W., Abrahams R.B. X-ray-based medical imaging and resolution // American Journal of
28. Du Plessis A., Yadroitsava I., Yadroitsev I. Effects of defects on mechanical properties in metal additive
manufacturing: A review focusing on X-ray tomography insights // Materials & Design. 2020. V. 187. Article
Дефектоскопия
№ 8
2020