Электромагнитные методы
УДК 620.179.14
МЕТОДИКА РЕШЕНИЯ ОБРАТНОЙ ГЕОМЕТРИЧЕСКОЙ
ЗАДАЧИ МАГНИТОСТАТИКИ ДЛЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ
МАГНИТОМЯГКОГО ФЕРРОМАГНЕТИКА
© 2022 г. А.В. Никитин1,*, Ю.Л. Гобов1,**, А.В. Михайлов1,***, Л.В. Михайлов1, ****
1Институт физики металлов им. М.Н. Михеева УрО РАН,
Россия 620108 Екатеринбург, ул. С. Ковалевской, 18
E-mail:*an@imp.uran.ru; **go@imp.uran.ru; ***mikhaylov@imp.uran.ru; ****mikhaylov_lv@imp.uran.ru
Поступила в редакцию 11.07.2022; после доработки 25.10.2022
Принята к публикации 25.10.2022
Представлено детальное описание методики, позволяющей решить обратную геометрическую задачу магнитоста-
тики для поверхностных дефектов ферромагнитной пластины в трехмерном случае при любой конфигурации взаимного
расположения магнитных преобразователей и дефектов и при условии учета нелинейности отклика ферромагнетика на
внешнее стационарное магнитное поле. Впервые приведено применение методики для конфигурации, при которой
дефекты расположены на ближайшей к магнитным преобразователям поверхности металла.
Ключевые слова: обратная геометрическая задача магнитостатики, дефектометрия, дефекты потери сплошно-
сти металла, поверхностные дефекты, магнитное поле рассеяния дефекта, тангенциальное намагничивание,
MFL-метод.
DOI: 10.31857/S013030822212003X, EDN: BUXHRH
ВВЕДЕНИЕ
Актуальность контроля изделий из магнитомягких ферромагнетиков (сталей различных марок,
сплавов) обусловлена широтой их применения на объектах промышленности и транспорта, а
также в других важных областях человеческой жизнедеятельности. Для диагностики ферромаг-
нитных объектов наиболее широко используется MFL-метод [1]. Аббревиатура MFL расшифровы-
вается как Magnetic Flux Leakage — рассеяние магнитного потока, т.е. в зоне дефекта магнитный
поток частично выходит из металла наружу, что фиксируют магнитные преобразователи, располо-
женые над поверхностью пластины. Популярность MFL-метода обусловлена портативностью
первичных преобразователей, отсутствием особых требований к подготовке поверхности металла,
высокой скоростью сканирования, простотой автоматизации процесса измерения
[2—4].
Недостатком метода MFL является то, что в настоящее время он является индикаторным и может
лишь указываеть на проблемные участки объекта контроля. Для определения геометрических
параметров формы дефектов необходим дополнительный анализ — например, сравнение топогра-
фии измеренных компонент магнитного поля с топографией поля эталонных дефектов [5, 6].
Решение обратной геометрической задачи магнитостатики для поверхностных дефектов [7] позво-
лило бы существенно улучшить качество контроля методом MFL и сэкономить время и средства,
направленные на исследование ферромагнитных объектов.
В [8] приведен метод приближенного решения обратной геометрической задачи магнитостати-
ки на основе измеренного над поверхностью металла распределения магнитного поля, но этот
метод применим лишь в двумерной конфигурации, при которой магнитные преобразователи рас-
положены над поверхностью с дефектом и при постоянной величине магнитной проницаемости
ферромагнетика.
В [9—11] был разработан теоретический подход к приближенному решению обратной геоме-
трической задачи магнитостатики для трехмерных дефектов с учетом нелинейной зависимости
μ(|H|) для случая расположения магнитных преобразователей над бездефектной поверхностью
ферромагнитной пластины.
В настоящей работе представлена методика, позволяющая приближенно решить обратную гео-
метрическую задачу магнитостатики для ферромагнитной пластины, содержащей поверхностный
дефект на одной из своих поверхностей, по измеренному магнитному полю над любой из поверх-
ностей пластины (рис. 1, 2). Несмотря на то, что в данной работе методика применяется к двумер-
ному случаю, при постоянном значении магнитной проницаемости μ (μ>>1) материала пластины
методика позволяет решать обратную геометрическую задачу магнитостатики и в трехмерном
случае с учетом нелинейной зависимости μ от вектора напряженности магнитного поля.
Методика решения обратной геометрической задачи магнитостатики ...
25
ПОСТАНОВКА ЗАДАЧИ
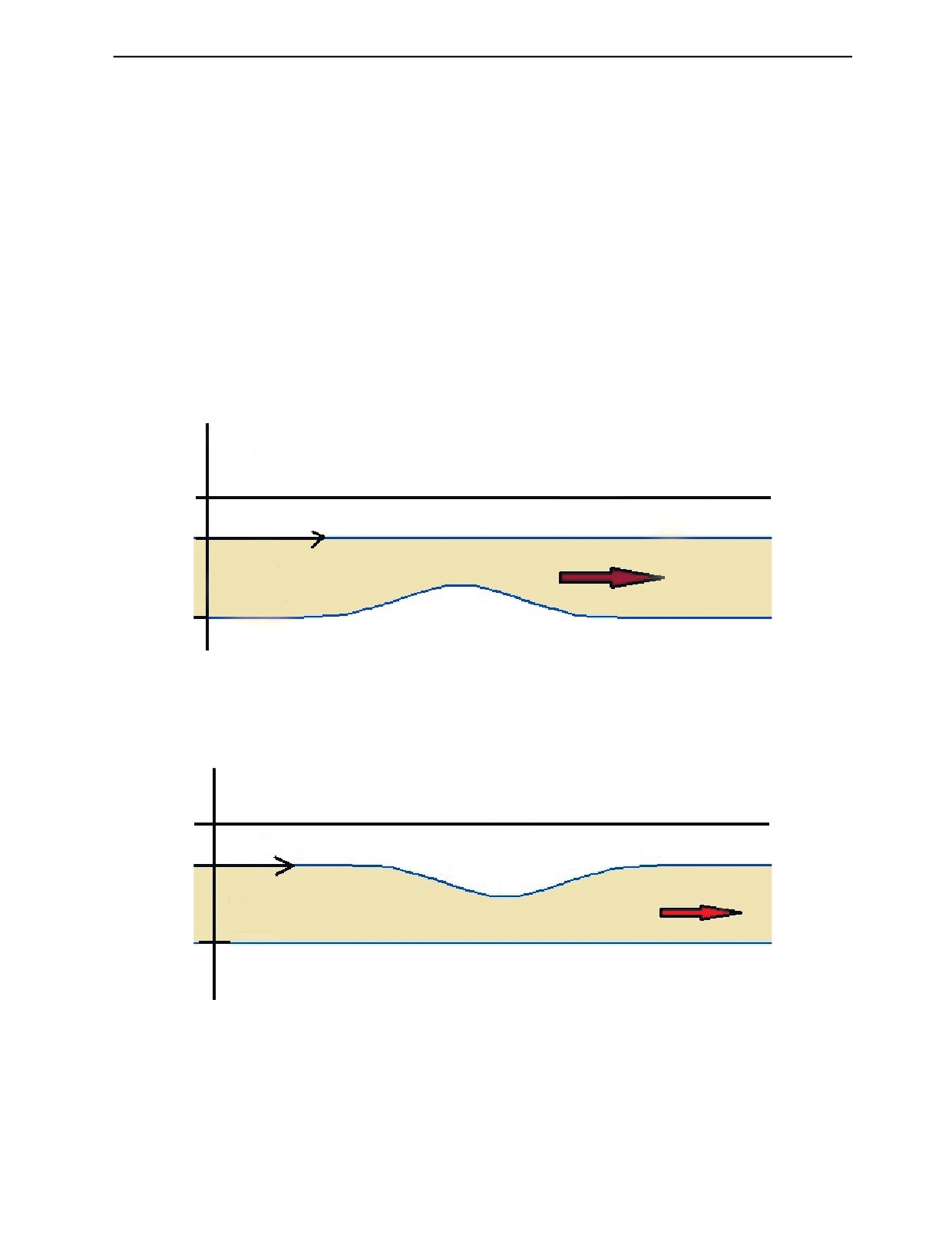
Пусть в трехмерном пространстве расположена ферромагнитная пластина с относительной
магнитной проницаемостью μ (μ = const, μ >>1), на одной из ее поверхностей находится беско-
нечно протяженный поверхностный дефект потери сплошности металла (см. рис. 1, 2). На рис. 1
и 2 изображены сечения пластины плоскостью, перпендикулярной прямой, вдоль которой вытя-
нут дефект. Оси х и z лежат в плоскости рисунка, а ось y — перпендикулярна плоскости чертежа
так, чтобы все три оси образовывали правую тройку. Величина внешнего намагничивающего
поля постоянна: H0 = (H0x, 0, 0); H0x = const; H0 — вектор напряженности внешнего магнитного
поля. Рис. 1 и 2 различаются лишь по взаимному расположению магнитных преобразователей и
поверхности пластины, содержащей дефект. На рис. 1 показана конфигурация расположения маг-
нитных преобразователей над бездефектной поверхностью металла. Назовем такое взаимное рас-
положение Конфигурацией 1. На рис. 2 изображена Конфигурация 2. Отличить, имеем мы дело с
Конфигурацией 1 или Конфигурацией 2, с помощью магнитного поля можно способом, описан-
ным в [12], используя полюсное (перпендикулярное поверхности) намагничивание пластины.
Магнитные преобразователи в этом случае фиксируют магнитное поле только от дефектов на
ближайшей поверхности пластины.
z Воздух
μ = 1
Магнитные преобразователи
z = Z0
x
H0
μ >> 1
Металл
z = -T
Воздух
μ = 1
Рис. 1. Конфигурация 1. Магнитные преобразователи расположены над бездефектной поверхностью металла;
Т — толщина пластины.
z Воздух
μ = 1
Магнитные преобразователи
z = Z0
x
Металл
H0
μ >> 1
z = -T
Воздух
μ = 1
Рис. 2. Конфигурация 2. Магнитные преобразователи расположены над поверхностью пластины, содержащей дефект;
Т — толщина пластины.
Сформулируем задачу: по измеренному полю на уровне z = Z0 необходимо определить параме-
тры формы поверхностного дефекта потери сплошности металла для Конфигурации 1 и для
Конфигурации 2.
Дефектоскопия
№ 12
2022
26
А.В. Никитин, Ю.Л. Гобов, А.В. Михайлов, Л.В.Михайлов
Поскольку понимание работы методики решения задачи для Конфигурации 1 принципиально
важно для понимания работы методики решения задачи для Конфигурации 2, еще раз опишем как
работает методика решения задачи для Конфигурации 1 в двумерном линейном случае.
МЕТОДИКА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ФОРМЫ ДЕФЕКТА ПО ИЗМЕРЕННЫМ НАД
БЕЗДЕФЕКТНОЙ ПОВЕРХНОСТЬЮ МЕТАЛЛА КОМПОНЕНТАМ МАГНИТНОГО ПОЛЯ
Проведем мысленный эксперимент. Если поместить вытянутую вдоль оси x ферромагнитную
пластину (при этом ферромагнетик имеет бесконечно большое значение μ), содержащую на одной
поверхности дефект потери сплошности металла, во внешнее однородное намагничивающее поле,
направленное также по оси x (как на рис. 1, 2), то из закона преломления силовой магнитной
линии на границе двух сред следует, что силовые магнитные линии, построенные вблизи границ
металл—воздух внутри такого образца, будут описывать форму поверхностей пластины. При этом
считаем, что дефект и прилегающие к нему справа и слева области достаточно удалены от краев
пластины.
В магнитомягких ферромагнетиках относительная магнитная проницаемость велика [13] и
составляет величины от 100 до 100 000. Поэтому описанное выше свойство силовых магнитных
линий можно использовать для приближенного решения обратной геометрической задачи магни-
тостатики.
На первом этапе, используя уравнения Максвелла для случая магнитостатики, можно восста-
новить магнитное поле в ферромагнетике, начиная с бездефектной границы металл—воздух, где
значения компонент магнитного поля известны (начальные условия) до некоторой величины по
оси z (величина z может превышать реальную толщину пластины — обозначим ее Т), при этом
считая, что всюду ниже находится металл. Далее, используя величины вычисленных компонент
магнитного поля, можно построить систему силовых магнитных линий. Силовые магнитные
линии начинаются слева от дефекта в бездефектной области, где влияние магнитного поля, созда-
ваемого дефектом пренебрежимо мало, и заканчиваются в такой же области справа от дефекта.
Выбрав силовую магнитную линию точки которой при удалении от дефекта образуют прямую
с постоянной координатой z, соответствующей толщине пластины (z = -Т, см. рис. 1), мы получим
кривую, приближенно описывающую форму поверхностного дефекта. Предположение о том, что
всюду ниже уровня с начальными условиями находится металл, означает, что поток вектора маг-
нитной индукции между двумя силовыми линиями, построенными на границах металл—воздух,
вверху и внизу пластины постоянен, т.е. получаем случай с μ = ∞.
Предлагаемая схема расчета не учитывает реального скачка нормальной составляющей напря-
женности при переходе металл—воздух на поверхности дефекта (вся расчетная область считается
металлом). Оценить аналитически величину возникающей по этой причине погрешности в рас-
чете силовых линий поля внутри изделия практически невозможно. Поэтому судить о такой
погрешности можно с помощью многократных тестовых расчетов по определению формы поверх-
ностных дефектов для случаев, при которых такая форма заранее известна. Такие расчеты были
проделаны путем решения прямой задачи в программе FEMM.
Для иллюстрации результатов расчетов приведем два примера, отражающих общие черты
поведения силовых магнитных линий для поверхностных дефектов.
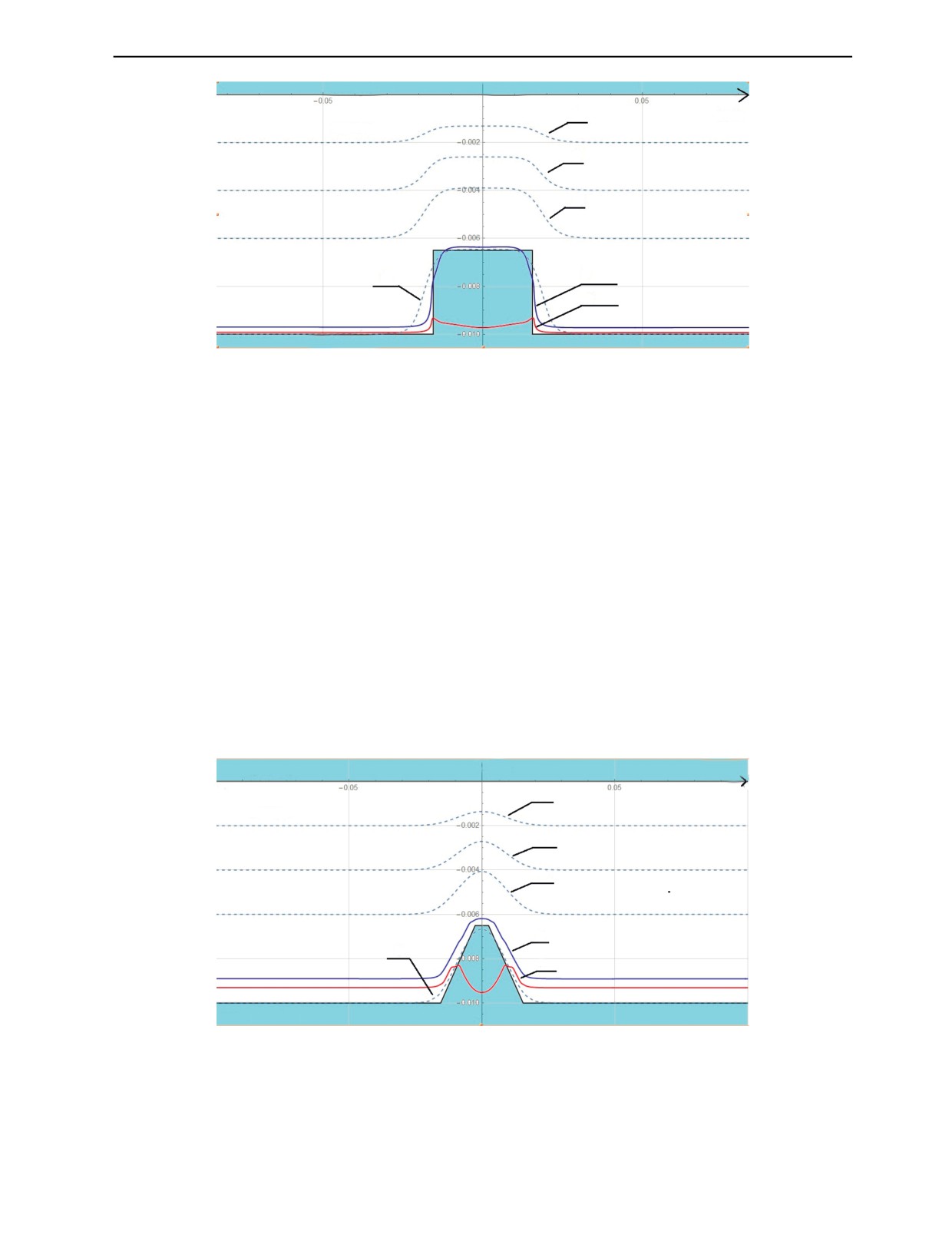
На рис. 3 для поверхностного дефекта «каверна» [7] изображены силовые линии, полученные
в результате решения прямой (в программе FEMM) и обратной задачи. В качестве начальных усло-
вий для решения обратной задачи были взяты значения компонент магнитного поля на бездефект-
ной границе металл—воздух, вычисленные в программе FEMM. Глубина дефекта «каверна»
3,5 мм, раскрытие 31 мм.
До уровня глубины дефекта силовые магнитные линии, полученные в результате решения пря-
мой задачи, совпадают с магнитными линиями, полученными в результате решения обратной
задачи. На рис. 3 эти линии обозначены номерами 1—3. Магнитные линии с номерами 4 и 5 полу-
чены в результате решения прямой задачи. До силовой магнитной линии, обозначенной на рис. 3
цифрой 4, магнитные линии, полученные в результате решения прямой задачи, выходят из метал-
ла наподобие магнитной линии с номером 5. Магнитная линия с номером 6 получена в результате
решения обратной задачи. Как видно из рис. 3, она хорошо описывает глубину дефекта и несколь-
ко хуже его раскрытие. Однако локализовать дефект по оси x позволяет топография любой из рас-
считанных компонент напряженности магнитного поля в металле
На рис. 4 для поверхностного дефекта «общая коррозия» [7] изображены силовые линии, полу-
ченные в результате решения прямой (в программе FEMM) и обратной задачи. В качестве началь-
Дефектоскопия
№ 12
2022
Методика решения обратной геометрической задачи магнитостатики ...
27
z, м
Воздух
x, м
1
Металл
2
3
6
4
5
Воздух
Рис. 3. Силовые магнитные линии для дефекта «каверна», построенные в результате решения прямой и обратной задачи.
Значения магнитного поля в плоскости xz в прямой задаче рассчитаны в программе FEMM. В качестве начальных усло-
вий для решения обратной задачи также были взяты значения магнитного поля, рассчитанные в программе FEMM. До
уровня глубины дефекта силовые магнитные линии, вычисленные в результате решения прямой и обратной задачи,
совпадают (штриховые линии 1—3). Силовые магнитные линии 4 и 5 получены в результате решения прямой задачи.
Силовая магнитная линия 6 (штриховая линия) получена в результате решения обратной задачи.
ных условий для решения обратной задачи были взяты значения компонент магнитного поля на
бездефектной границе металл—воздух, вычисленные в программе FEMM. Глубина дефекта
«общая коррозия» 3,5 мм, раскрытие 31 мм.
Как видно из рис. 4, силовые магнитные линии качественно ведут себя так же, как и на рис. 3.
Но при более плавном росте глубины дефекта силовая магнитная линия, полученная в результате
решения обратной задачи, лучше описывает его локальную форму.
Поскольку в трещинах и трещиноподобных дефектах [7] магнитный поток (вследствие малой
величины раскрытия дефекта) проходит по воздуху, то представленная методика не может быть
применена для получения параметров формы таких дефектов.
Итак, перейдем к численной реализации решения обратной задачи для Кофигурации 1 и для
Конфигурации 2.
Воздух
z, м
x, м
1
Металл
2
3
4
6
5
Воздух
Рис. 4. Силовые магнитные линии для дефекта «общая коррозия», построенные в результате решения прямой и обратной
задачи. Значения магнитного поля в плоскости xz в прямой задаче рассчитаны в программе FEMM. В качестве начальных
условий для решения обратной задачи также были взяты значения магнитного поля, рассчитанные в программе FEMM. До
уровня глубины дефекта силовые магнитные линии, вычисленные в результате решения прямой и обратной задачи, совпа-
дают (штриховые линии 1—3). Силовые магнитные линии 4 и 5 получены в результате решения прямой задачи. Силовая
магнитная линия 6 (штриховая линия) получена в результате решения обратной задачи.
Дефектоскопия
№ 12
2022
28
А.В. Никитин, Ю.Л. Гобов, А.В. Михайлов, Л.В.Михайлов
КОНФИГУРАЦИЯ 1
Впервые методика решения обратной задачи для такой конфигурации была предложена в рабо-
тах [9, 10], в [11] методика была проверена в условиях реального эксперимента с сильно вытяну-
тым дефектом (квазидвумерный случай), обсуждены границы применимости методики. В [10, 11]
показана возможность примения методики в трехмерном нелинейном (μ — нелинейная функция
от |H|) случае.
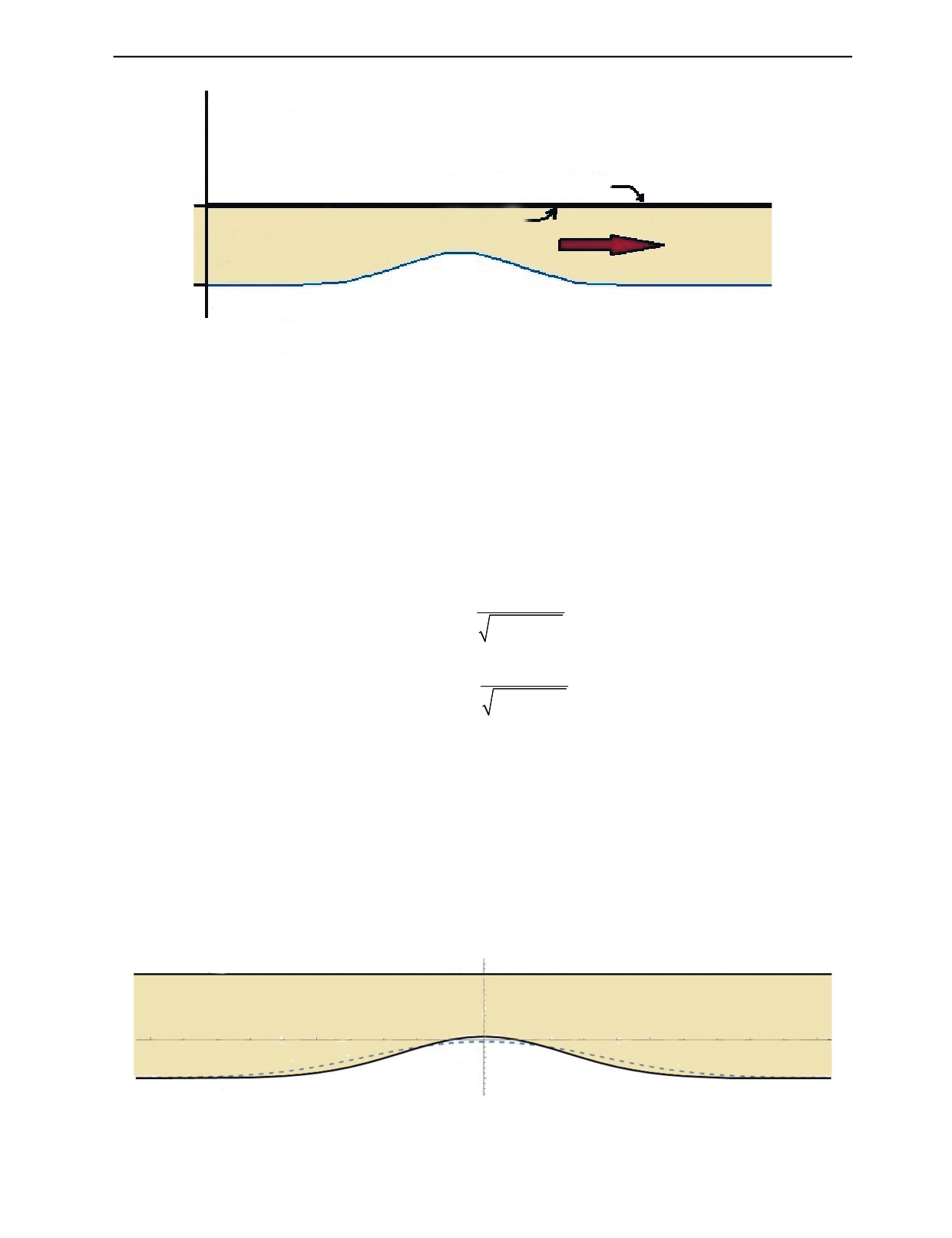
Итак, допустим для простоты, что поле измерено прямо на границе воздух—металл со стороны
воздуха (рис. 5). Для пересчета величин компонент магнитного поля в металл (на границе воздух—
металл) используем выражения сопряжения на границе двух сред (1):
Hτвоздух = Hτметалл;
Bnвоздух = Bnметалл,
(1)
где Hτвоздух, Hτметалл — тангенциальные компоненты напряженности магнитного поля на границе
воздух—металл; Bnвоздух, Bnметалл — нормальные компоненты индукции магнитного поля на границе
воздух—металл. Значения Hτметалл, Bnметалл вместе со значениями их производных по оси х (которые
можно вычислить) будут начальными данными для восстановления поля в направлении -z, вглубь
металла.
Для восстановления поля в металле перепишем уравнения Максвелла для случая магнитоста-
тики в виде начальной задачи Коши. А именно:
rot H =0,
div B = µ · div = 0.
(2)
Откуда получим:
∂H
∂H
x
z
=
,
∂z
∂x
∂H
−∂H
z
x
=
(3)
∂z
∂x
Решим систему уравнений (3) методом конечных разностей. Для этого разобьем плоскость
сечения металлической пластины на рис. 5 прямоугольной сеткой с шагом сетки по оси х — Δx; по
оси z — Δz. По оси z: начиная с уровня Zn = -0 (с уровня границы воздух—металл со стороны
металла) и заканчивая несколько ниже уровня z = -T. По оси х: от левого края (см. рис. 5), где
влияние дефекта пренебрежимо мало, и заканчивая противоположным правым краем, на таком же
удалении от дефекта. Начальные данные: компоненты магнитного поля (Hx, Hz) с помощью (1)
определены в точках на границе воздух—металл со стороны металла, т.е. в узлах сетки (1, j), где
индекс j принимает значения от 1 до некой величины Nj, характеризующей максимальное число
∂H
∂H
x
столбцов сетки; производные по координате х:
и z
вычислим с помощью конечно-раз-
ностных аппроксимаций:
∂x
∂x
∂H
k
(4)
(
1,
j
)
=
(H
(
1,
j
+1
)
−
H
(
1,
j
−1))/(2⋅∆
),
k
k
x
∂x
где k = x, z. Для удобства будем считать Hk(i, 1) = Hk (i, Nj) и Hk (i, Nj +1) = Hk (i, 2), где индекс i
принимает значения от 1 до величины Ni, характеризующей максимальное число строк сетки.
Таким образом начальные условия определены во всех узлах сетки по оси х.
Итак, перепишем решение системы (3) в конечных разностях:
H
∂
z
H
x
(
i
+1,
j
)
=
H
x
(
i
,
j
)
−
(i,j)⋅∆
z
;
∂x
H
∂
x
H
(
i
+
1,
j
)
=
H
(
i
,
j
)
−
(i,j)⋅∆
,
(5)
z
z
z
∂x
Дефектоскопия
№ 12
2022
Методика решения обратной геометрической задачи магнитостатики ...
29
z Воздух
μ = 1
Уровень измерений
Уровень 0
H0
x
μ >> 1
Металл
Воздух
z = -T
μ = 1
Рис. 5. Конфигурация 1. Магнитные преобразователи расположены на бездефектной поверхности металла. Магнитные
преобразователи расположены на границе воздух—металл со стороны воздуха.
знаки в правой части системы уравнений (5) поставлены с учетом отрицательного направления по
оси z при восстановлении поля в металле (см. рис. 5).
Используя систему (5), мы можем пересчитать значения компонент магнитного поля в узлах
сетки от начального уровня до последней строки сетки, все время предполагая, что не покидаем
область пространства, занятую ферромагнетиком. Значения компонент магнитного поля в любой
точке между узлами сетки можно получить, используя, например, линейную интерполяцию.
Восстановив, таким образом, значения компонент магнитного поля во всем пространстве вну-
три сетки, мы можем строить силовые линии следующим способом:
H
z,i
Z
=
Z
+
⋅l;
B,i+1
B,i
2
2
H
+
H
x
,i
z
,i
H
x,i
X
=
X
+
⋅l,
B,i+1
B,i
(6)
2
2
H
+
H
x
,i
z
,i
где ZB,i — z-координаты точек силовой линии; XB,i — х-координаты точек силовой линии;
l — длина малого отрезка (10—100 мкм) для построения силовой линии.
Построим силовую линию, начинающуюся из бездефектной области слева от дефекта
(см. рис. 5), где влияние магнитного поля дефекта пренебрежимо мало, и заканчивающуюся в
такой же области справа от дефекта на уровне z = -T (Т — толщина пластины). Построенная таким
образом кривая определяет геометрические параметры формы поверхностного дефекта.
Границы применимости метода, полученные в результате численного эксперимента, обсужде-
ны в [11].
На рис. 6 приведена кривая, построенная описанным выше способом, форма дефекта задана
гауссианой с высотой 4 мм и раскрытием 30 мм. Толщина пластины равна 10 мм. Стоит отметить,
z, м
Воздух
0,000
-0,002
Металл
-0,004
x, м
-0,02
-0,01
0,01
0,02
-0,008
-0,010
Воздух
Рис. 6. Силовая магнитная линия (штриховая линия) точно повторяет форму дефекта (граница металл—воздух показана
сплошной линией).
Дефектоскопия
№ 12
2022
30
А.В. Никитин, Ю.Л. Гобов, А.В. Михайлов, Л.В.Михайлов
что такая толщина (10 мм) характерна как для стенок труб магистральных нефте- и газопроводов,
так и для стенок бурильных и насосно-компрессорных труб. Начальные условия для решения
обратной задачи были рассчитаны в результате решения прямой задачи с помощью программы
FEMM.
Максимальная разница между рассчитанной кривой и кривой, описывающей форму дефекта,
составляет величину около 7 %.
КОНФИГУРАЦИЯ 2
В случае такого взаимного расположения магнитных преобразователей и поверхности с дефек-
том (см. рис. 2) уровень по оси z, на котором можно пересчитать поле с уровня измерений (воздух)
в металл, неизвестен. Однако можно найти способ частично свести решение задачи для
Конфигурации 2 к уже описанному решению задачи для Конфигурации 1.
Действительно, при удалении от системы зарядов (в данном случае фиктивных магнитных
зарядов) на расстояния большие, чем расстояния между зарядами в системе, топография поля от
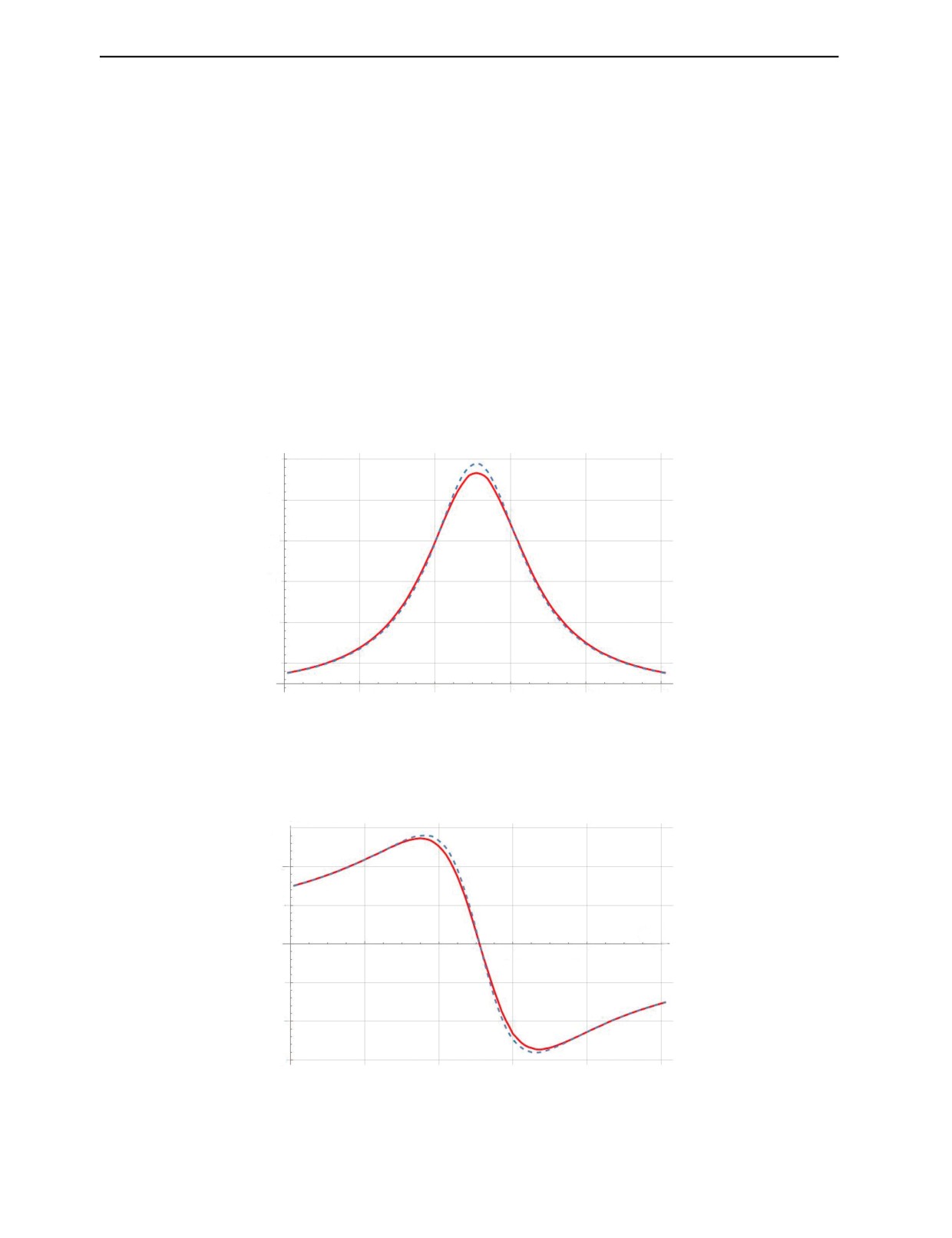
зарядов становится одинаковой, с какой бы стороны не производили измерения. В качестве иллю-
страции приведем рис. 7 и 8, на которых показано полученное в результате численного экспери-
Hx, А/м
700
680
x, мм
20
40
60
80
100
Рис. 7. Сплошная линия соответствует распределению Hx, измеренному на расстоянии 3Т (30 мм) от бездефектной
поверхности; штриховая линия соответствует распределению Hx, измеренному на расстоянии 3Т от содержащей дефект
поверхности.
Hz, А/м
30
20
10
x, мм
20
40
60
80
100
–10
-20
-30
Рис. 8. Сплошная линия соответствует распределению Hz, измеренному на расстоянии 3Т (30 мм) от бездефектной
поверхности; штриховая линия соответствует распределению Hz, измеренному на расстоянии 3Т от содержащей дефект
поверхности.
Дефектоскопия
№ 12
2022
Методика решения обратной геометрической задачи магнитостатики ...
31
мента (решение прямой задачи в программе FEMM) распределение компонент магнитного поля от
пластины, содержащей уже описанный выше дефект: глубина 4 мм, величина раскрытия 30 мм,
толщина пластины 10 мм. Компоненты поля измерены на расстоянии 3Т (30 мм) от поверхности
пластины для обеих конфигураций.
С учетом картины распределения компонент магнитного поля на рис. 7 и 8 можно считать, что
у нас имеются компоненты магнитного поля, измеренные над бездефектой поверхностью
(Конфигурация 1) и, таким образом, полностью свести задачу нахождения формы дефекта к опи-
санному выше методу.
Однако, увеличивая расстояние, мы увеличиваем область, в которой нужно восстанавливать
компоненты магнитного поля, что ведет к накоплению ошибки при пересчете поля с одного уров-
ня по оси z на другой. Полученная в результате кривая определит форму дефекта неточно.
Предлагается следующий метод для решения задачи по восстановлению формы поверхностно-
го дефекта в случае Конфигурации 2.
Измерив компоненты магнитного поля на расстояниях, близких к величине Т/2, от содержащей
дефект поверхности, можно использовать их при вычислении начальных условий в геометрии зада-
чи для Конфигурации 1. Очевидно, что получившаяся (в результате решения по вышеописанному
методу) кривая определит форму дефекта с ошибкой. Далее нужно найти способ уточнения геоме-
трических параметров получившейся кривой, определяющей форму поверхностного дефекта.
Хорошим естественным критерием для уточнения формы дефекта является равенство танген-
циальных составляющих напряженности магнитного поля в точках кривой на расчитанной грани-
це металл—воздух: а) полученное пересчетом компонент поля по воздуху, начиная от уровня
измерений; б) полученное описанным в предыдущем абзаце способом от начальных условий в
металле.
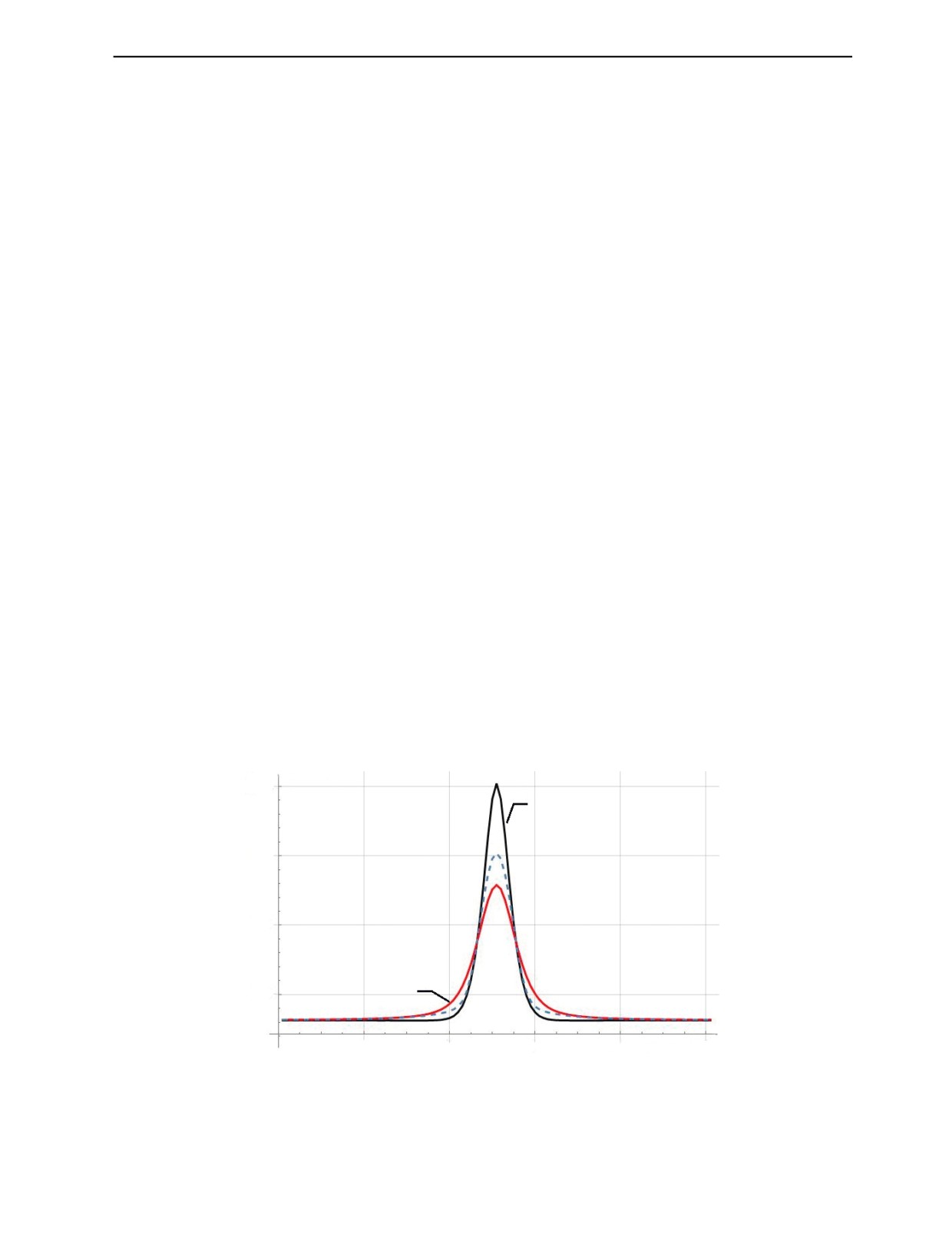
На рис. 9 показаны три кривые, полученные в результате решения прямой задачи при помощи
программы FEMM, параметры формы дефекта те же как и ранее. Две кривые соответствуют рас-
пределению Hx, измеренному на расстоянии 0,5Т от поверхности пластины: для Конфигурации 1
(сплошная линия с номером 1) и Конфигурации 2 (штриховая линия). Третья кривая — сплошная
линия с номером 2 представляет распределение Hx на границе воздух—металл со стороны металла
(Конфигурация 1), т.е. с учетом того, что в случае Конфигурации 1 компоненты Hz на границе воз-
дух—металл со стороны металла практически равны нулю (в соответствии с выражениями сопря-
жения компонент магнитного поля на границе двух сред Hz уменьшается в μ раз при пересчете из
воздуха в металл, μ = 1000, при этом даже в зоне дефекта максимальное значение величины Hx
больше максимального значения Hz), кривая 2 — это начальные условия для получения силовой
магнитной линии, определяющей форму дефекта.
Hx, А/м
1000
2
900
800
1
700
x, мм
20
40
60
80
100
Рис. 9. Сплошная линия 1 соответствует распределению Hx, измеренному на расстоянии 0,5Т от бездефектной поверх-
ности; штриховая линия соответствует распределению Hx, измеренному на расстоянии 0,5Т от содержащей дефект
поверхности; сплошная линия 2 — это распределение Hx на границе воздух—металл со стороны металла на бездефект-
ной поверхности пластины.
Дефектоскопия
№ 12
2022
32
А.В. Никитин, Ю.Л. Гобов, А.В. Михайлов, Л.В.Михайлов
По геометрии кривых на рис. 9 видно, что штриховая линия может быть хорошим первым при-
ближением для получения с помощью некоего алгоритма сплошной линии с номером 2. Очевидно,
что измеренное над дефектом поле для любой формы поверхностного дефекта будет хорошим
приближением для начальных условий на бездефектной поверхности. Это замечание относится
только к объяснению логики построения метода, применяемого для решения задачи в случае
Конфигурации 2. В действительности, в случае Конфигурации 2 мы не имеем возможности изме-
рить распределение Hx на бездефектной поверхности металла.
Итак, в качестве первого шага используем результаты измерений, полученные на расстоянии
0,5Т от поверхности с дефектом (штриховая линия на рис. 9) в качестве начальных условий на
границе металла, на бездефектной поверхности. Используем метод для решения обратной геоме-
трической задачи магнитостатики для Конфигурации 1. Результат показан на рис. 10.
z, м
Воздух
0,000
-0,002
Металл
-0,004
-0,006
-0,02
-0,01
0,01
x, м
0,02
-0,008
-0,010
Воздух
Рис. 10. Вычисленная магнитная силовая линия (штриховая кривая). В качестве начальных данных взяты результаты
измерений Hx, полученные на расстоянии 0,5Т от поверхности с дефектом.
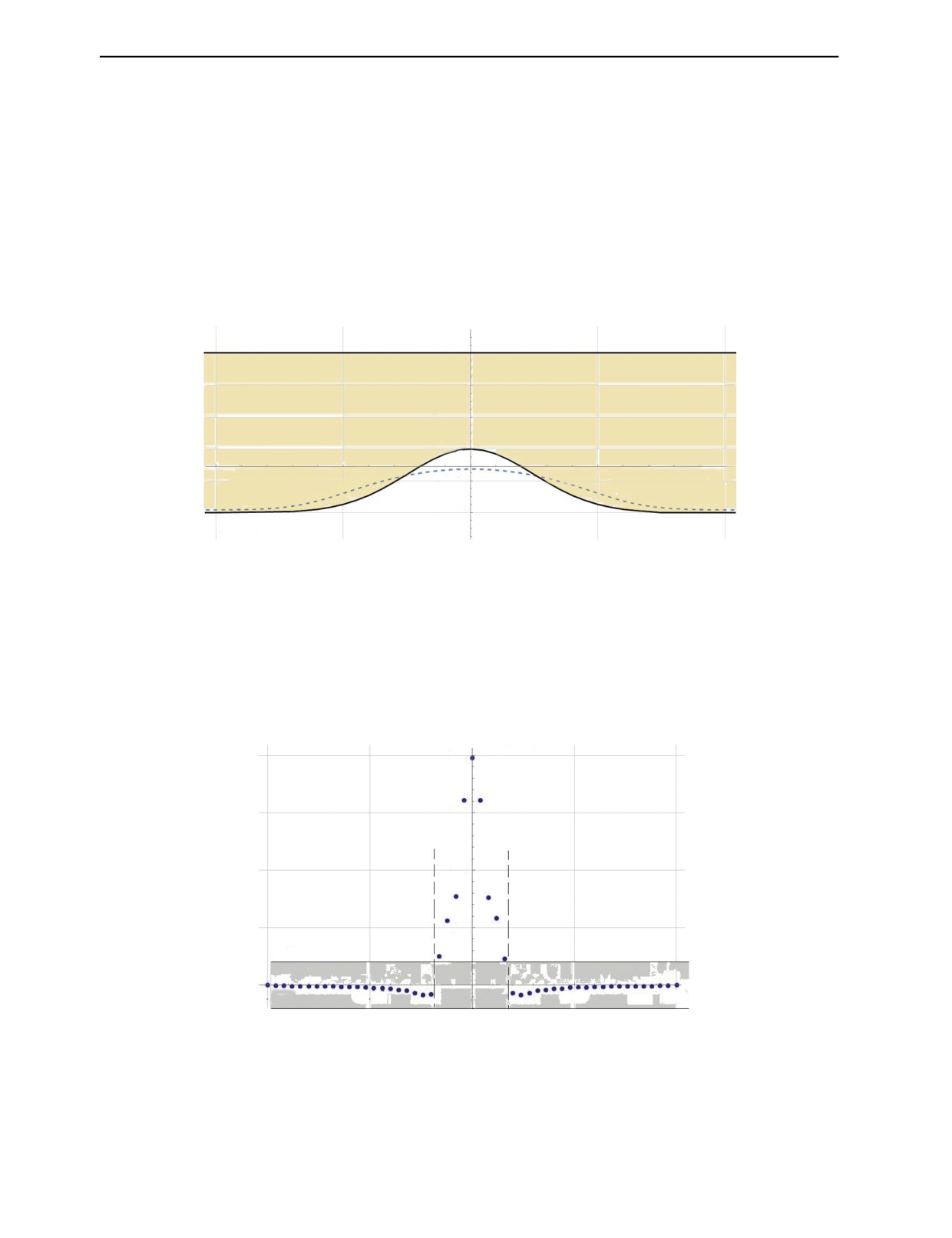
Как и ожидалось, получившаяся линия описывает форму дефекта неточно. Максимальная раз-
ница между рассчитанной кривой и кривой, описывающей форму дефекта, составляет величину
немного более 20 %. На рис. 11 показана разница (ΔHτ) в точках вычисленной кривой между тан-
генциальными составляющими напряженности магнитного поля, вычисленными от уровня изме-
рений в воздухе и от уровня начальных данных в металле.
∆Hτ, А/м
200
150
100
50
20 А/м
-0,10
-0,05
0,05
x, м
0,10
Рис. 11. ∆Hτ в точках вычисленной кривой — штриховой линии на рис. 10.
Условимся, что если в любой точке вычисленной кривой |ΔHτ| < 20 А/м, то такая точка являет-
ся решением обратной геометрической задачи. Таким образом, на рис. 11 множество точек, рас-
положенных до левой штриховой линии и после правой штриховой линии, является решением
обратной задачи.
Дефектоскопия
№ 12
2022
Методика решения обратной геометрической задачи магнитостатики ...
33
Для получения точек пространства между штриховыми линиями, удовлетворяющих описанно-
му выше критерию и, значит, определяющих форму дефекта, повторим процедуру решения обрат-
ной задачи для Конфигурации 1. В качестве новых начальных условий в узлах сетки на границе
металл—воздух со стороны металла положим следующие значения тангенциальной составляю-
щей напряженности магнитного поля:
мет
возд
мет
H
=
k
⋅(H
+
H
)/2,
(7)
x,1,i
i
τ,i
τ,i
мет нач
мет
где
k
=
H
/
Hτ
— коэффициент уменьшения. Он показывает, насколько уменьшается тан-
i
x,i
,i
генциальная составляющая напряженности магнитного поля в точках по оси х при переходе с
уровня границы поверхности металла с дефектом на уровень начальных условий;
H
мет нач —
x
,i
начальное значение в i-й точке по оси х тангенциальной компоненты напряженности магнитного
поля, на границе в металле, на бездефектной поверхности;
Hτмет — значение тангенциальной
,i
составляющей напряженности магнитного поля в i-й точке по оси х в металле, на границе поверх-
ности металла с дефектом, рассчитанное от начальных условий в металле;
Hτв
озд — значение в i-й
,i
точке по оси х тангенциальной составляющей напряженности магнитного поля в воздухе, на гра-
нице поверхности металла с дефектом, рассчитанное от уровня измерений в воздухе.
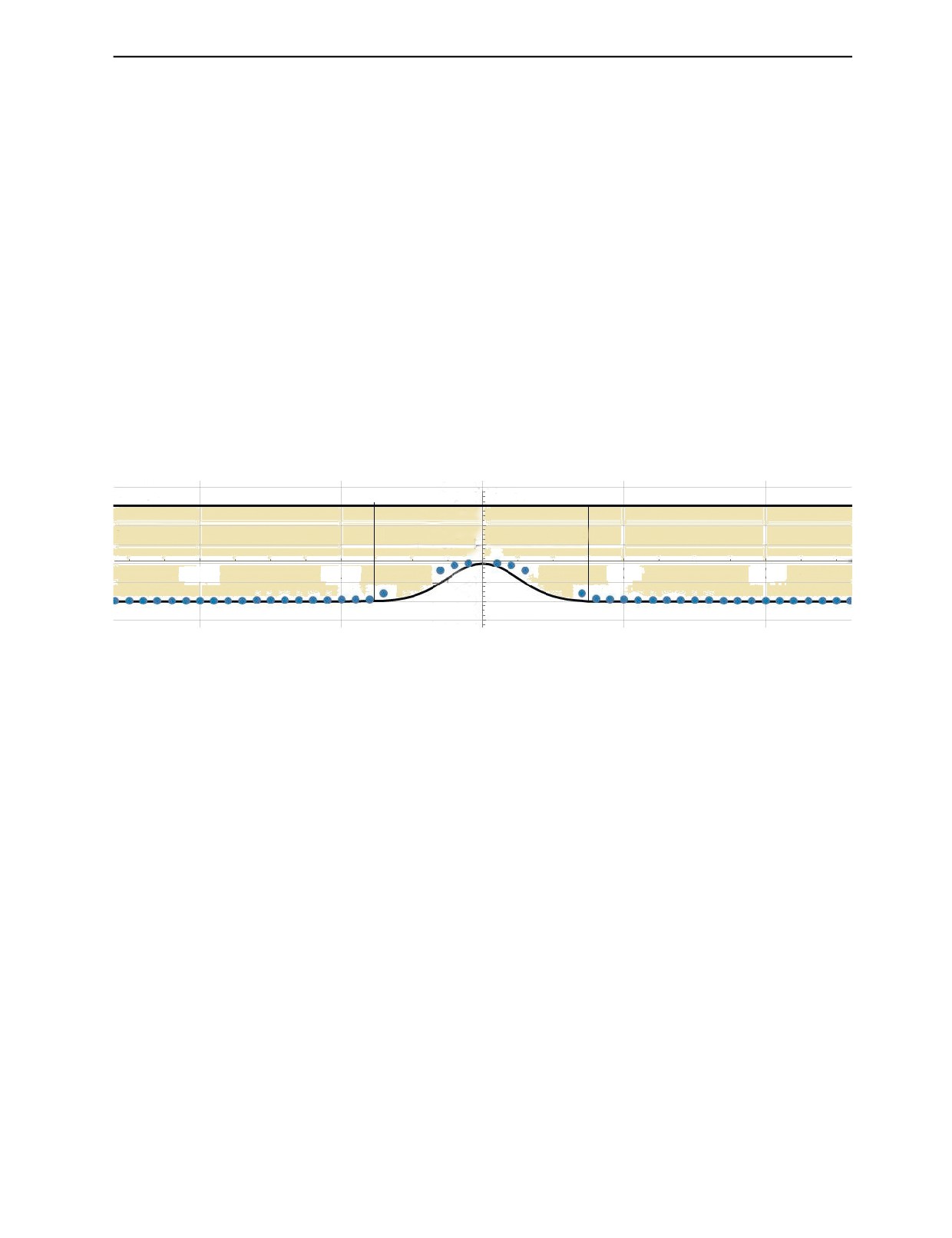
После двух итераций с использованием формулы (7) для задания начальных условий, получаем
множество точек, определяющих форму дефекта, как показано на рис. 12. Во всех точках выпол-
нено условие |ΔHτ| < 20 А/м.
0,002
Воздух
z, м
0,000
–0,002
Металл
Область дефекта
-0,004
-0,04
-0,02
0,02
0,04
x, м
–0,008
-0,010
Воздух
-0,012
Рис. 12. Полученное после двух итераций множество точек, в которых |∆Hτ| < 20 А/м, определяет параметры формы
дефекта. Точность определения глубины дефекта превышает 97 %.
Заметим, что в начале каждой «итерации» мы задаем новые начальные условия, которые
используются для вычисления производных. Численное дифференцирование приближенно задан-
ных функций (результаты измерений) является некорректной задачей, поэтому спустя три-четыре
«итерации» получившаяся кривая перестает быть непрерывной функцией аргумента: малые изме-
нения аргумента приводят к значительным изменениям значений функции. Отсюда следует, что
предложенным методом можно определить лишь фрагменты формы дефекта, а также его раскры-
тие (как и в случае Кофигурации 1 [11]) и глубину.
ЗАКЛЮЧЕНИЕ
Представленный метод показывает возможность определения параметров формы дефекта,
находящегося на любой поверхности исследуемой металлической пластины, при использовании
стандартного MFL-метода.
Работа выполнена в рамках государственного задания по теме
«Диагностика»,
Г.р. № 122021000030-1.
СПИСОК ЛИТЕРАТУРЫ
1. Shi Yan, Zhang Chao, Li Rui, Cai Maolin, Jia Guanwei. Theory and Application of Magnetic Flux
Leakage Pipeline Detection // Sensors (Basel). 2015. Dec. V. 15. No. 12. P. 31036—31055. https://www.ncbi.
nlm.nih.gov/pmc/articles/PMC4721765/
2. Внутритрубная диагностика с помощью магнитных дефектоскопов MFL/CDP и (или) TFI/AFD,
post/vnutritrubnaya-diagnostika-spomoshchyu-magnitnykh-defektoskopov-vysokogo-razresheniya
Дефектоскопия
№ 12
2022
34
А.В. Никитин, Ю.Л. Гобов, А.В. Михайлов, Л.В.Михайлов
3. Большакова В.В., Кукин Н.А., Дымкин Г.Я. О возможности применения магнитных методов нераз-
рушающего контроля для оценки напряженно-деформированного состояния трубопроводов // Известия
izvestiya-peterburgskogo-universiteta-putey-soobscheniya?i=897018
4. Слесарев Д.А., Абакумов А.А. Обработка и предоставление информации в MFL-методе неразру-
5. Канайкин В.А. Внутритрубная магнитная дефектоскопия магистральных трубопроводов / Под
ред. А.Ф. Матвиенко. Рос. акад. наук, Урал. отд-ние, Ин-т физики металлов, ЗАО НПО «Спецнефтегаз».
Екатеринбург: УрО РАН, 2009. 307 c.
6. Дякин В.В., Кудряшова О.В., Раевский В.Я. Поле рассеяния пластины с поверхностным дефектом
в однородном внешнем поле // Дефектоскопия. 2018. № 12. С. 23—31.
8. Кротов Л.Н. Реконструкция границы раздела сред по пространственному распределению магнит-
ного поля рассеяния. II. Постановка и метод решения обратной геометрической задачи магнитостатики
// Дефектоскопия. 2004. № 6. С. 36—44.
9. Gobov Yu.L., Nikitin A.V., Popov S.E. Solving the Inverse Geometric Problem of Magnetostatics for
Corrosion Defects // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 10. P. 726—732. https://
elibrary.ru/item.asp?id=38652516
10. Gobov Yu.L., Nikitin A.V., Popov S.E. Solving the Inverse Geometric Problem of Magnetostatics for
Corrosion Defects with Allowance for Nonlinear Properties of Ferromagnet // Russian Journal of Nondestructive
11. Nikitin A.V., Mikhailov A.V., Petrov A.S., Popov S.E., Gobov Y.L. A technique for practical reconstruction
of the form parameters of surface two-dimensional defects taking into account nonlinear properties of a
ferromagnet // Russian Journal of Nondestructive Testing. 2021. V. 57. No. 12. P. 1103—1112. [Никитин А.В.,
Михайлов А.В., Петров А.С., Попов С.Э., Гобов Ю.Л. Методика практического восстановления пара-
метров формы поверхностных двухмерных дефектов с учетом нелинейных свойств ферромагнетика //
Дефектоскопия. 2021. № 12. С. 46—55.]
12. Nikitin A.V., Mikhaylov A.V., Gobov Yu.L., Popov S.E. Determination of the Surface of Defect Location
and Restoration of Its Geometric Parameters by the Mfl Method with One-Sided Access to the Ferromagnetic
Plate // Diagnostics, Resource and Mechanics of materials and structures. 2021. Is. 6. P. 45—53. http://dream-
journal.org/issues/2021-6/2021-6_348.html
13. Преображенский А.А., Бишард Е.Г. Магнитные материалы и элементы. М.: Высшая школа, 1986.
349 с.
Дефектоскопия
№ 12
2022