ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
УДК 519.85:338.436.33
DOI: 10.31857/2500-2082/2023/5/98-104, EDN: XGRYZL
КОНЦЕПТУАЛЬНЫЕ ОСНОВЫ СОЗДАНИЯ
АВТОМАТИЗИРОВАННОГО КОМБАЙНА ДЛЯ УБОРКИ КАРТОФЕЛЯ
С ЦИФРОВОЙ СИСТЕМОЙ ИДЕНТИФИКАЦИИ ПОЧВЕННЫХ КОМКОВ
И ИХ ОТДЕЛЕНИЯ ОТ ТОВАРНОЙ ПРОДУКЦИИ*
Алексей Семенович Дорохов, академик РАН
Алексей Викторович Сибирёв, доктор технических наук
Максим Александрович Мосяков, кандидат технических наук
Николай Викторович Сазонов, кандидат технических наук
Сергей Николаевич Петухов, кандидат сельскохозяйственных наук
Мария Михайловна Годяева, аспирант
Дмитрий Николаевич Кынев, аспирант
Оксана Сергеевна Чистякова, магистрант
ФГБНУ «Федеральный научный агроинженерный центр ВИМ», г. Москва, Россия
E-mail: dorokhov@rgau-msha.ru
Аннотация. В ФНАЦ ВИМ разработаны концептуальные основы создания автоматизированного комбайна для уборки кар-
тофеля с цифровой системой идентификации почвенных комков и их отделения от товарной продукции. Существующие
машины выполняют технологический процесс в условиях повышенной влажности почвы, что отрицательно влияет на по-
казатели качества уборки в результате снижения полноты сепарации. Для определения оптимальных значений разрабо-
танной сепарирующей системы и рекомендаций в последующих изменениях конструктивно-технологических параметров
машин представлена конструктивная схема автоматизированного комбайна, принципиальная схема моделирования системы
идентификации почвенных комков в среде Matlab/Simulink, выполнена выборка данных полевых исследований качества сепа-
рирующей системы уборочной машины, а также показана работа нейронной сети и поверхность ошибки нейрона по иденти-
фикации почвенных комков в процессе движения по сепарирующей поверхности.
Ключевые слова: автоматизированный комбайн, цифровая система идентификации, уборка, сепарация, картофель, рабочие
органы, сепарирующая система
CONCEPTUAL FRAMEWORKS FOR CREATING
AN AUTOMATED POTATO HARVESTER WITH A DIGITAL SYSTEM
FOR IDENTIFYING SOIL LUMPS AND SEPARATING THEM
FROM COMMERCIAL POTATO PRODUCTS
A.S. Dorokhov, Academician of the RAS
A.V. Sibirev, Grand PhD in Engineering Sciences
M.A. Mosyakov, PhD in Engineering Sciences
N.V. Sazonov, PhD in Engineering Sciences
S.N. Petukhov, PhD in Agricultural Sciences
M.M. Godyaeva, PhD Student
D.N. Kynev, PhD Student
O.S. Chistyakova, Master Student
FGBNU “Federal Scientific Agroengineering Center VIM”, Moscow, Russia
E-mail: dorokhov@rgau-msha.ru
Abstract. FSC VIM has developed the conceptual basis for creating an automated potato harvester with a digital system for identifying
soil lumps and separating them from marketable products. Existing machines carry out the technological process in conditions of high
soil moisture, which negatively affects the quality of harvesting as a result of a decrease in the completeness of separation. To determine
the optimal values of the developed separating system and recommendations for subsequent changes in the design and technological
parameters of the machines, a design diagram of an automated harvester is presented, a schematic diagram of modeling a system for
identifying soil lumps in the Matlab/Simulink environment, data selection from field studies of the operation quality of the harvesting
machine separating system, as well as the work of the neural network system and the neuron error surface for identifying soil lumps while
moving along the separating surface are shown.
Keywords: automated harvester, digital identification system, harvesting, separation, potatoes, working parts, separating system
* Работа выполнена при государственной поддержке РНФ конкурса 2022 года «Проведение исследований научными груп-
пами под руководством молодых ученых» Президентской программы исследовательских проектов, реализуемых ведущими
учеными, в том числе молодыми учеными № 22-76-10002 / The work was carried out with the state support of the RNF of the 2022
contest “Conducting research by scientific groups under the leadership of young scientists” of the Presidential Program of research
projects implemented by leading scientists, including young scientists No. 22-76-10002.
ВЕСТНИК РОССИЙСКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ НАУКИ • № 5-2023
98
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
Повреждение клубней картофеля при механи-
в значительной мере увеличивает содержание трав-
зированной уборке зависит от конструкции кар-
мированных корнеплодов и луковиц.
тофелеуборочных машин, материала, из которого
Все чаще применяют электронные системы кон-
изготовлены их рабочие органы и режимов работы.
троля и поддержания оптимальных режимов работы
Не последнюю роль играют физико-механические
машин для уборки корнеплодов и лука с помощью
свойства клубней, определяемые сортом, агротех-
специальных датчиков, оценивающих уровень за-
никой возделывания, структурой почвы, климатиче-
грузки сепарирующих элеваторов. Данные обраба-
скими условиями. [1, 7, 11] Но основное влияние на
тываются бортовым компьютером, и по заданному
полноту сбора продукции, сохранение урожайности
оптимизационному алгоритму устанавливается
картофеля и экономический эффект производства
скорость элеваторов. Это позволяет исключить
оказывают технологии уборки.
вмешательство человека в технологический процесс
Существующие конструкции уборочных машин
сепарации и снизить количество травмированных
представляют совокупность различных систем се-
корнеплодов и луковиц. [9]
парации, для повышения качества работы и ма-
Основное условие эффективного использования
териалоемкости которых используют сочетание
картофелеуборочных машин - загрузка рабочих орга-
известных схем очистки, учитывая отрицательное
нов. В зависимости от физико-механических свойств
действие веса на уплотнение почвенного слоя при
продукта одно и то же количество товарной продук-
уборке. [3, 5, 10]
ции, поступающее в комбайн, может привести к раз-
В настоящее время не достает автоматизирован-
личной степени загрузки. Для уборочных агрегатов
ных инструментов принятия решений, комплексно
и самоходных шасси разработана широкая номенкла-
берущих данные различных информационных ис-
тура универсальных систем автоматического контро-
точников для поддержки и оптимизации производ-
ля (УСАК) частоты вращения рабочих органов и сиг-
ственных и технологических процессов.
нализации отклонений данных параметров от нормы.
Для повышения уровня автоматизации следует
Система внедрена на ботвоуборочных (БМ-4,
регистрировать важные параметры в реальном вре-
БМ-6), свеклоуборочных (РКС-4, КС-6, РКМ-6)
мени и включать их в массив данных. Необходи-
машинах, картофелеуборочном комбайне КСК-4.
мо выполнить обзор конструктивных схем специ-
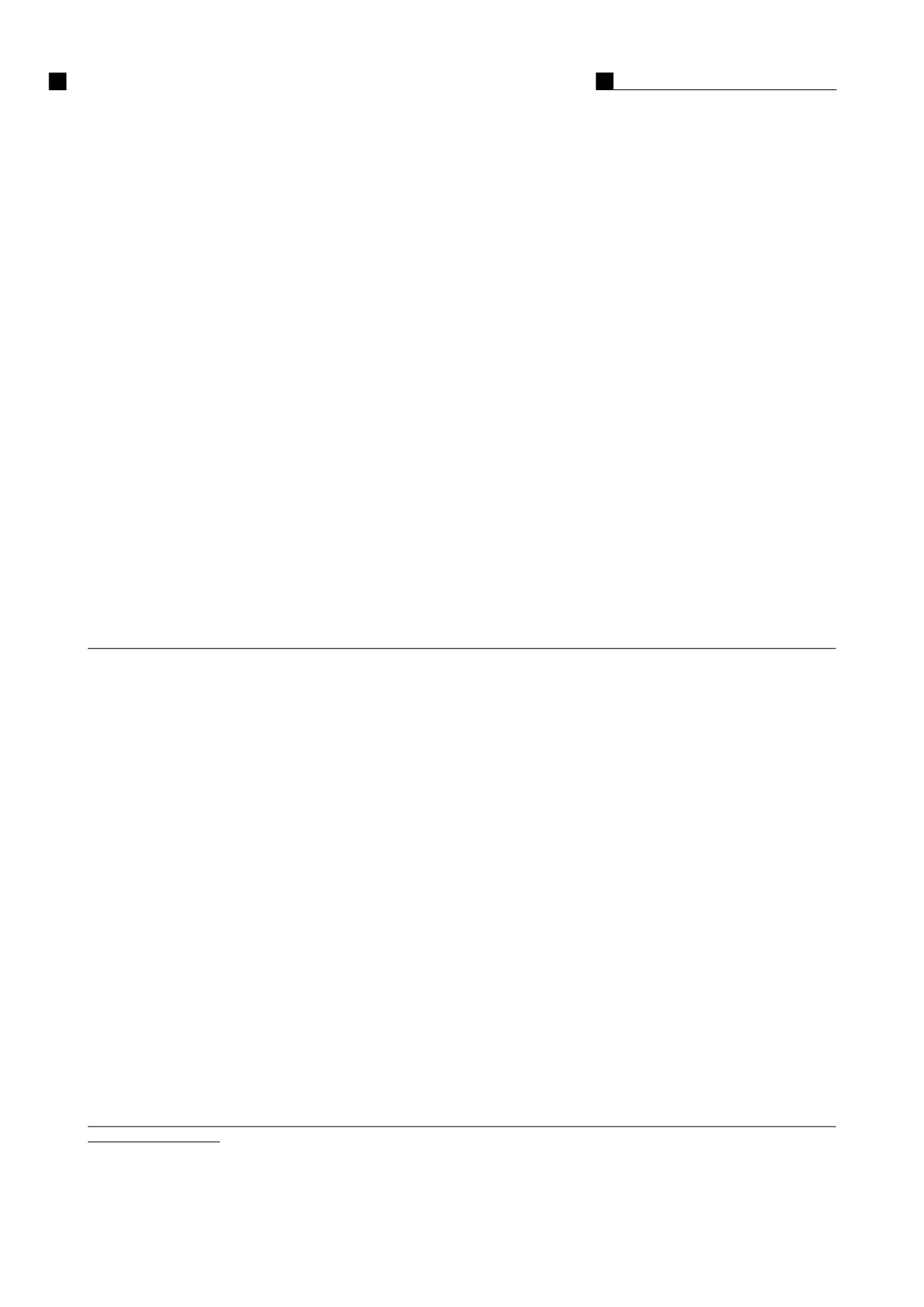
Известно, что сепарирующая способность прутко-
ализированных машин, по результатам определить
вого элеватора зависит от угла наклона α и скорости
процессы автоматизации и разработать принци-
vЭЛ (рис. 1).
пиальную конструктивно-технологическую схему
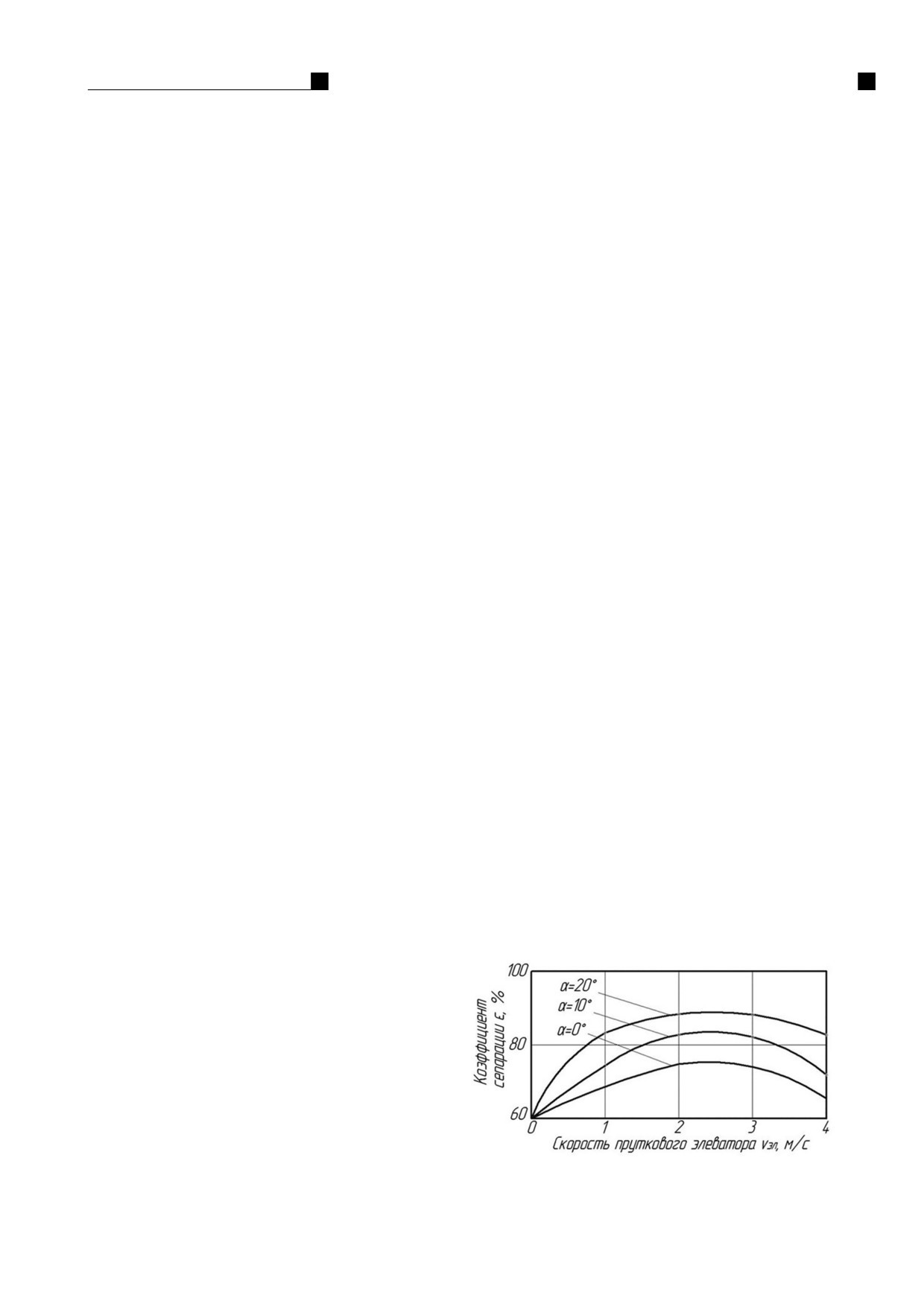
Схема картофелеуборочного комбайна с цифро-
комбайна для совершенствования технологического
вой системой элементов искусственного интеллекта
процесса уборки картофеля. [4, 8, 12]
показана на рисунке 2 [6].
Цель исследования - разработка автоматизиро-
При движении машины по полю катки-диабо-
ванного уборочного комбайна с цифровой системой
ло 2, перемещаясь по междурядьям, обеспечивают
идентификации почвенных комков и их отделения
необходимую глубину подкапывания. Пассивные
от товарной продукции.
плоские обрезные диски 4 подрезают почвенный
пласт секционными лемехами 3 на глубину ниже
МАТЕРИАЛЫ И МЕТОДЫ
залегания корнеплодов, картофеля и лука и предот-
вращают его разваливание. Затем масса вороха по-
На территории России наибольшее распростра-
ступает на приемный сепарирующий элеватор 5, где
нение получили элеваторные комбайны - AVR
от продукта отделяется крупноразмерная примесь
Esprit, Grimme GV 3000, Kverneland UN 2212, Bolko,
с помощью встряхивателя 9. Далее ворох попадает
Dewulf RA-3060.
на поперечно- пальчатое полотно переноса продукта
Выбор данных машин обусловлен более высо-
элеватора 6 для очищения от более мелких примесей.
кими показателями качества работы по сравнению
В случае небольшой массы вороха положение по-
с устаревшей техникой производства ГДР (Е-684,
лотна элеватора 6 не изменяется и остается горизон-
Е665) и СССР (ККУ-2А, КПК-2, ККР-2), что под-
тальным, при ее увеличении автоматически проис-
тверждается протоколами машинно-испытательных
ходит срабатывание датчиков 12, размещенных на
станций.
полотне, сигнал поступает на блок управления 10,
На основании анализа конструктивных решений,
представленных выше машин для уборки картофеля
можно сделать вывод, что для более качественного
и оперативного управления сложными процессами
в современном сельскохозяйственном производстве,
их оптимизации по определенным критериям, не-
обходимо слияние различных показателей, получа-
емых от сенсоров разных типов и информационных
источников. [2] Доступные важные и ценные данные
не могут быть полностью использованы, если неиз-
вестны алгоритмы их взаимосвязей.
Приводы элеваторов большинства уборочных
машин выполнены с возможностью регулировки
скорости вращения, но на практике для повышения
Рис. 1. График зависимости коэффициента сепарации ε
чистоты сходового вороха чаще всего этот параметр
от угла наклона α пруткового элеватора
и поступательной скорости движения vЭЛ.
устанавливается на максимальное значение, что
99
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
Рис. 2. Конструктивно-технологическая схема картофелеуборочного комбайна с цифровой системой элементов
искусственного интеллекта: 1 - рама; 2 - каток-диаболо; 3 - плоский секционный лемех; 4 - диск обрезной;
5 - приемный элеватор; 6 - элеватор переноса продуктов; 7 - горка выносная; 8 - основной элеватор; 9 - встряхиватель;
10 - блок управления; 11 - механизм исполнительный; 12 - датчик массы; 13 - бункер приемный.
который приводит в действие исполнительный ме-
В вычислительном модуле системы синтезиру-
ханизм 11, поднимающий заднюю часть полотна на
ется нейроконтроллер, который для определенного
угол 15…20°. Он считается оптимальным, посколь-
момента времени при известных данных входных
ку увеличивается время сепарации, что позволяет
возмущений с помощью нейросети (НС) находит
более эффективно отделять примеси. После сниже-
значение управляющего воздействия с последующей
ния массы снова срабатывают датчики 12 и по той
его реализацией на управляющем модуле. На вход
же схеме полотно возвращается в исходное положе-
системы подается сигнал текущего значения ско-
ние. Величина заданной массы зависит от урожай-
рости и вычисляется эталонное. Соответствующие
ности убираемой культуры, а время сепарации - от
массивы входных и выходных данных регулятора
физико-механического состава и влажности по-
применяют для нахождения управляющего воздей-
чвы. Качество убираемой продукции повышается
ствия, минимизирующего отклонение оптимальных
и снижается ее травмируемость. Отсепарированная
и фактических величин очистки клубней картофеля
масса поступает на продольную выносную горку 7,
от механических примесей. Информация поступает
которая перемещает корнеплоды, картофель и лук
в систему управления (СУ) машины. На основании
в безударном рабочем режиме на основной сепари-
данных о скорости u (в нашем случае - V) строится
рующий прутковый элеватор 8, при этом удаляются
и обучается нейромодель объекта, ее выходные сиг-
оставшиеся почвенно-растительные примеси. За-
налы максимально приближены к выходным сиг-
тем поток поступает в бункер 13 машины, который
налам реального объекта, в качестве которого будет
после заполнения сбрасывает очищенный продукт,
выступать поливная норма - y (в нашем случае - m).
например, в кузов транспортного средства.
Строится процесс обучения нейромодели управле-
ния полнотой сепарации. Для создания обучающего
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
множества на вход объекта управления подается слу-
чайный процесс V - значения полноты сепарации
Приводы элеваторов большинства уборочных
(согласно агротехническим требованиям и протоко-
машин выполнены с возможностью регулировки
лам машинно-испытательных станций). На террито-
скорости вращения, но на практике для повышения
рии Российской Федерации для этой цели построены
чистоты сходового вороха чаще всего данный пара-
государственные зональные машиноиспытательные
метр устанавливается на максимальное значение,
станции (МИС). За время их существования были
что приводит к росту травмированных корнеплодов
исследованы образцы картофелеуборочных ком-
и луковиц в сходе.
байнов элеваторного и бункерного типа: Grimme SE
Применение нейронных сетей в системах управле-
150-60; AVR Esprit; AVR Spirit 6200; AVR Spirit 8200;
ния повышает качество функционирования сложных
Grimme BR-150; Grimme DR 150; Grimme GT 170;
систем с нелинейными объектами и связями (рис. 3).
Grimme GT 300; Grimme SE-260; двухрядный AVR
Accent; ККР-2 (см. таблицу).
Задача обучения нейронной сети - найти зна-
чения w1,k, w2,k, …, wn,k и bk, имея заданные наборы
данных.
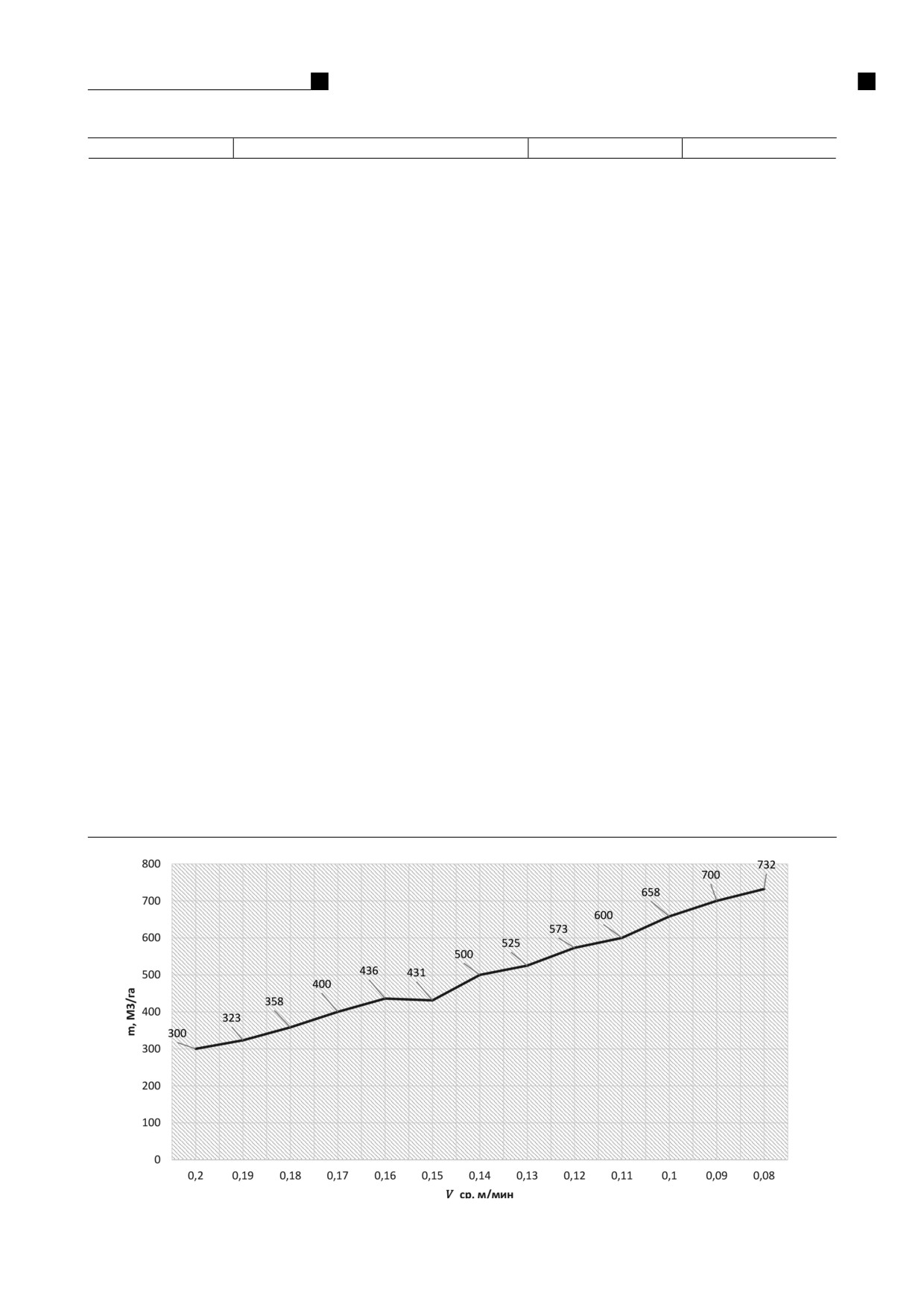
На первом этапе собирали исходные данные
действующих широкозахватных дождевальных ма-
шин, необходимые для синтеза нейроконтроллера,
а также программы расчета оптимальных показате-
лей качества уборки. [8] Выборка данных полевых
исследований фактических значений представлена
на рисунке 4.
Рис. 3. Схема системы регулирования
Задача синтеза нейроконтроллера требует скур-
с использованием нейросетевой модели.
пулезной работы по подбору топологии нейронных
ВЕСТНИК РОССИЙСКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ НАУКИ • № 5-2023
100
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
Результаты испытаний картофелеуборочной техники
Марка и модель
Технологический показатель, %
Скорость комбайна, км/ч
Протокол
Потери - 1,7
Grimme SE 150-60
чистота вороха клубней - 98,3
5,6
№ 10-41-17 (6240632)
повреждение клубней - 12,5
Потери - 0,7...0,8
AVR Esprit
чистота вороха клубней - 91,2...91,8
3,9...4,6
№ 03-60-06 (4090062)
повреждение клубней - 1,2
Потери - 1,8
чистота вороха клубней - 95,4
3,96
№ 03-70-13 (5090052)
повреждение клубней - 1,5
Потери - 0,1
AVR Spirit 6200
чистота вороха клубней - 99,7
2,9
№ 03-34-16 (2090052)
повреждение клубней - 4
Потери - 0,3
чистота вороха клубней - 99
5,8
№ 03-43-19 (5090012)
повреждение клубней - 3,3
Потери - 1...1,1
AVR Spirit 8200
чистота вороха клубней - 88,4...90,6
3,55...5,6
№ 03-54-06 (4090132)
повреждение клубней - 1,3...1,4
Потери - 0,4
Grimme BR150
чистота вороха клубней - 89,8
5,5
№ 08-20-2015 (5090022)
повреждение клубней - 5
Потери отсутствуют
Grimme DR 150
чистота вороха клубней - 80,4
4,8
№ 08-26-2016 (5090092)
повреждение клубней отсутствуют
Потери - 1,5
Grimme GT 170
чистота вороха клубней - 87,5
4,5
№ 08-39-2013 (5090022)
повреждение клубней - 0,35
Потери - 2
Grimme GT 300
чистота вороха клубней - 85,7
4,3
№ 08-37-2013 (5090032)
повреждение клубней - 0,5
Потери - 1
Grimme SE260
чистота вороха клубней - 86,7
5,3
№ 08-29-2015 (5090032)
повреждение клубней - 2,6
Потери - 0,5...0,8
AVR Accent
чистота вороха клубней - 86,1...88,6
3,7
№ 03-53-06 (4090052)
повреждение клубней - 2,94...3,25
Потери - 0,5
ККР-2
чистота вороха клубней - 100
2,8
№ 03-91-19 (5090022)
повреждение клубней - 3,3
Рис. 4. Выборка данных полевых исследований.
101
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
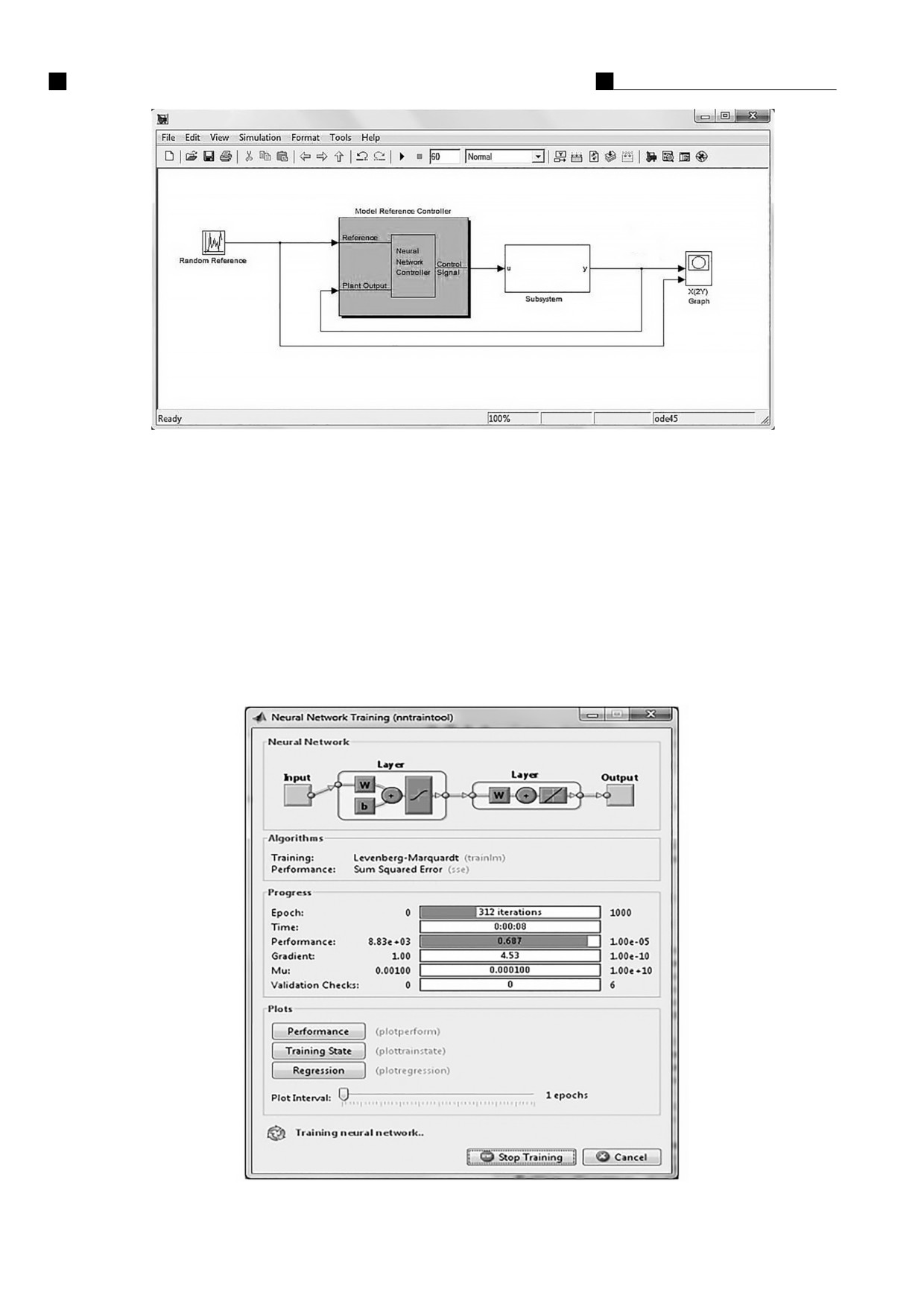
Рис. 5. Принципиальная схема моделирования в обозначениях системы Matlab/Simulink.
сетей, параметров обучения. Должна быть получена
Принципиальная схема моделирования в про-
нейронная сеть, представляющая модель контрол-
граммной среде Matlab/Simulink изображена на
лера, правильно вырабатывающая выходной сигнал
рисунке 5.
на обучающем множестве.
Нейронная сеть обучается на основе этих данных
Для проверки адекватности модели формируют
с использованием алгоритма Левенберга-Марк-
выходной сигнал системы на тестовом множестве.
вардта. Алгоритм показывает лучшие результаты
Исходя из результатов, можно заключить, что ней-
по сравнению с другими, хотя и требует большего
ромодель вырабатывает выходной сигнал, соответ-
объема памяти. Была выбрана структура нейронной
ствующий ожидаемому, при этом ошибка (разница
сети, позволяющая наиболее точно описать дина-
между требуемой и фактической величиной по-
мику системы: два слоя (первый содержит шесть
ливной нормы) - минимальная. Нейронная сеть
нейронов, второй - один), функция активации -
должна быть способна передать динамику процесса.
гиперболический тангенс, функция качества об-
Рис. 6. Обучение нейросети в Matlab.
ВЕСТНИК РОССИЙСКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ НАУКИ • № 5-2023
102
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
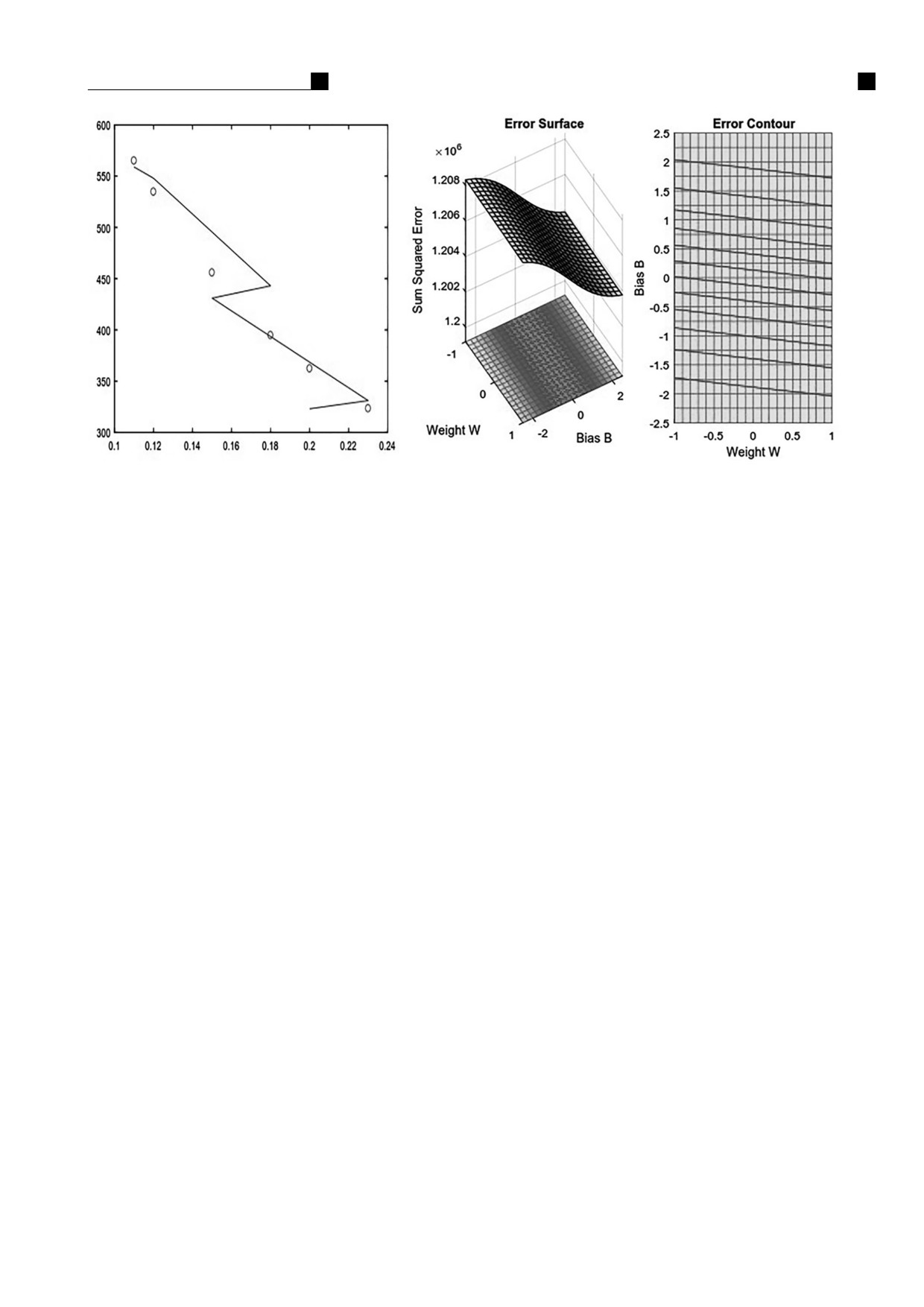
Рис. 7. Работа сети (слева) и поверхность ошибки нейрона (справа).
учения - среднеквадратическая ошибка. Процесс
СПИСОК ИСТОЧНИКОВ
обучения приведен на рисунке 6.
1.
Бышов Н.В., Сорокин А.А., Успенский И.А. и др.
Матрицы весовых коэффициентов первого
Принципы и методы расчета и проектирования рабо-
и второго слоев (W1 и W2), а также векторы смеще-
чих органов картофелеуборочных машин: Учеб. посо-
ний (b1 и b2) имеют значения:
бие. Рязань: Изд-во РГСХА, 2005. 282 с. URL: https://
search.rsl.ru/ru/record/01002859051
െ8.5276
8.2727
2.
Дорохов А.С., Аксенов А.Г., Сибирёв А.В. и др. Тео-
ۍ
ې
ۍ
ې
8.4022
െ5.0357
ретические предпосылки повышения сепарирующей
ۑ
ێ
ۑ
ێെ8.3422
2.0904ۑ
ێ
ۑ, bଵ=
ێ
системы машины для уборки корнеплодов тепловой
Wଵ =
8.4009ۑ
1.6856ۑ
ێ
ێ
энергией системы отработавших газов // Вестник Ка-
ێ
െ8.406 ۑ
ێെ5.0327ۑ
ۏ8.3973 ے
ۏ8.4032 ے
занского ГАУ. 2021. № 1 (61). С. 71-77. URL: http://
Wଶ =[െ0.69215
0.06806
1.6576
0.6581
1.0787
0.14988],
gau-1-60-2021_ru
bଶ =[0.064735].
3.
Измайлов А.Ю., Лобачевский Я.П., Дорохов А.С. и др.
Современные технологии и техника для сельского хо-
Графическая иллюстрация работы сети приведе-
зяйства - тенденции выставки Аgritechnika 2019. Тракто-
на на рисунке 7 (элементы обучающей выборки ото-
ры и сельхозмашины. 2020. № 6. С. 28-40. URL: https://
бражены точками, сплошная линия - выход сети).
journals.eco-vector.com/0321-4443/article/view/66556
Проведенное исследование ошибок и линий
4.
Камалетдинов Р.Р. Объектно-ориентированное ими-
уровня для нейрона в зависимости от весов W и сме-
тационное моделирование в среде теории информа-
щений b иллюстрирует адекватные параметры обу-
ции (информационное моделирование) // Известия
чения. Лучший вес и значение порога - это самые
Международной академии аграрного образования.
низкие точки на поверхности ошибки. Затем данная
сеть подключается к регулятору. Весовые коэффи-
item.asp?id=17693760
циенты сети считаются постоянными, а настраи-
5.
Костенко М.Ю., Костенко Н.А. Вероятностная оцен-
ваются лишь веса сети-регулятора, минимизируя
ка сепарирующей способности элеватора картофелеу-
расхождение отклика эталонной модели и заданных
борочной машины // Механизация и электрификация
нейронных сетей на одинаковый входной сигнал.
сельского хозяйства. 2009. № 12. С. 4. URL: https://
После обучения регулятор используется в контуре
elibrary.ru/item.asp?id=13022951
управления.
6.
Патент № 2799653 Россия, МПК А01 D 17/22 Машина
Выводы. Разработана конструктивная схема ав-
для уборки корнеплодов, картофеля и лука / А.С. До-
томатизированного комбайна для уборки картофе-
рохов, А.В. Сибирёв, А.Г. Аксенов и др. № 2023101961,
ля с цифровой системой идентификации почвен-
Заяв. 17.02.2023; Опубл. 07.07.2023, Бюл. № 19. https://
ных комков в среде Matlab/Simulink и их отделения
www1.fips.ru/iiss/document.xhtml?faces-redirect=true&i
от товарной продукции, выполнена выборка дан-
d=fe83b8b7880f1706dedbf75772fbb9ca
ных полевых исследований показателей качества
7.
Протасов А.А. Функциональной подход к созданию
работы сепарирующей системы, представлены по-
лукоуборочной машины
// Вестник Федерально-
казатели нейронной сети и поверхность ошибки
го государственного образовательного учреждения
нейрона по идентификации почвенных комков при
высшего профессионального образования Москов-
движении по сепарирующей поверхности убороч-
ский государственный агроинженерный университет
ной машины.
им. В.П. Горячкина. 2011. № 2 (47). С. 37-43. URL:
103
ПРОЦЕССЫ И МАШИНЫ АГРОИНЖЕНЕРНЫХ СИСТЕМ
noe modelirovanie) // Izvestiya Mezhdunarodnoj akademii
k-sozdaniyu-lukouborochnoy-mashiny
agrarnogo obrazovaniya. 2012. T. 1. № 14. S. 186-194.
8. Рейнгарт Э.С., Сорокин А.А., Пономарев А.Г. Унифи-
цированные картофелеуборочные машины нового по-
5. Kostenko M.Yu., Kostenko N.A. Veroyatnostnaya ocenka
коления // Тракторы и сельскохозяйственные маши-
separiruyushchej sposobnosti elevatora kartofeleuboroch-
noj mashiny // Mekhanizaciya i elektrifikaciya sel’skogo
gur/2006/200610.htm
9. Свидетельство о государственной регистрации програм-
item.asp?id=13022951
мы для ЭВМ RU № 2023620546. Динамическое и ста-
6. Patent № 2799653 Rossiya, MPK A01 D 17/00 Mashina
тическое воздействие по разрушению комков почвы
dlya uborki korneplodov, kartofelya i luka / A.S. Doro-
при уборке картофеля и корнеплодов / А.С. Дорохов,
hov, A.V. Sibiryov, A.G. Aksenov i dr. № 2023101961,
А.В. Сибирёв, А.Г. Аксенов и др. Опубл. 13.02.2023. 1 с.
Zayav.
17.02.2023; Opubl.
07.07.2023, Byul.
№ 19.
10. Сорокин А.А. Теория и расчет картофелеуборочных
rect=true&id=fe83b8b7880f1706dedbf75772fbb9ca
машин (монография). М.: ВИМ. 2006. 159 с. URL:
7. Protasov A.A. Funkcional’noj podhod k sozdaniyu luk-
ouborochnoj mashiny // Vestnik Federal’nogo gosudarst-
11. Dorokhov A.S., Sibirev A.V., Aksenov A.G. Dynamic sys-
vennogo obrazovatel’nogo uchrezhdeniya vysshego pro-
tems modeling using artificial neural networks for agricul-
fessional’nogo obrazovaniya Moskovskij gosudarstvennyj
tural machines // INMATEH - Agricultural Engineering.
agroinzhenernyj universitet im. V.P. Goryachkina. 2011.
INMATEH_2_2019/INMATEH-Agricultural_Engineer-
cle/n/funktsionalnoy-podhod-k-sozdaniyu-lukouboroch-
ing_58_2019.pdf
noy-mashiny
12. Dorokhov A., Didmanidze O., Aksenov A. et al. The Re-
8. Rejngart E.S., Sorokin A.A., Ponomarev A.G. Unifi-
sults of Experimental Studies of the Physical and Mechani-
cirovannye kartofeleuborochnye mashiny novogo poko-
cal Properties of an Elastic-Plastic Material for Tribological
leniya
// Traktory i sel’skohozyajstvennye mashiny.
Properties during Separation. Agriculture. 2023. 13. 1735.
2006.
gur/2006/200610.htm
9. Svidetel’stvo o gosudarstvennoj registracii programmy dlya
REFERENCES
EVM RU № 2023620546. Dinamicheskoe i staticheskoe
1. Byshov N.V., Sorokin A.A., Uspenskij I.A. i dr. Principy
vozdejstvie po razrusheniyu komkov pochvy pri uborke
i metody rascheta i proektirovaniya rabochih organov kar-
kartofelya i korneplodov / A.S. Dorohov, A.V. Sibiryov,
tofeleuborochnyh mashin: Ucheb. posobie. Ryazan’: Izd-
A.G. Aksenov i dr. Opubl. 13.02.2023. 1 s. URL: https://
www1.fips.ru/registers-doc-view/fips_servlet
record/01002859051
10. Sorokin A.A. Teoriya i raschet kartofeleuborochnyh mashin
2. Dorohov A.S., Aksenov A.G., Sibiryov A.V. I dr. Teoret-
icheskie predposylki povysheniya separiruyushchej sistemy
ru/results/katalog/2342/16135.html
mashiny dlya uborki korneplodov teplovoj energiej sistemy
11. Dorokhov A.S., Sibirev A.V., Aksenov A.G. Dynamic sys-
otrabotavshih gazov // Vestnik Kazanskogo GAU. 2021.
tems modeling using artificial neural networks for agricul-
tural machines // INMATEH - Agricultural Engineering.
com/stranitsi/vestnik-kazanskogo-gau-1-60-2021_ru
3. Izmajlov A.Yu., Lobachevskij Ya.P., Dorohov A.S. i dr.
INMATEH_2_2019/INMATEH-Agricultural_Engineer-
Sovremennye tekhnologii i tekhnika dlya sel’skogo hozya-
ing_58_2019.pdf
jstva - tendencii vystavki Agritechnika 2019. Traktory i
12. Dorokhov A. Didmanidze O. Aksenov A. et al. The Results
of Experimental Studies of the Physical and Mechanical
nals.eco-vector.com/0321-4443/article/view/66556
Properties of an Elastic-Plastic Material for Tribological
4. Kamaletdinov R.R. Ob”ektno-orientirovannoe imitacion-
Properties during Separation. Agriculture. 2023. 13. 1735.
noe modelirovanie v srede teorii informacii (informacion-
Поступила в редакцию 16.07.2023
Принята к публикации 30.07.2023
ВЕСТНИК РОССИЙСКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ НАУКИ • № 5-2023
104